The EDA SUM Project. Surveillance in an Urban environment using Mobile sensors. 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012
|
|
|
- Reynard Williamson
- 6 years ago
- Views:
Transcription
1 Surveillance in an Urban environment using Mobile sensors 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012
2 TABLE OF CONTENTS European Defence Agency Supported Project 1. SUM Project Description. 2. Subsystems Description. 3. SUM Demonstrator Description. 4. SUM On-field Campaign. 5. Conclusions & Roadmap. 13/09/2012 Page 2
3 SUM PROJECT DESCRIPTION
4 INTRODUCTION Contract included in the European Defence Agency Joint Investment Programme on Force Protection (JIP-FP). 3 rd Call Data Analysis, including Data Fusion from various Sources in May SUM Contract A-0827-RT-GC signed in May Consortium led by GMV (Spain) including: RMA Royal Military Academy (Belgium). TUM Technische Universitat Muchen (Germany). DLR Deutsches Zentrum für Luft und Raumfahrt (Germany). Project Kick-Off Meeting in July Project duration: 36 months. PM06 held on July /09/2012 Page 4
5 PROJECT OBJECTIVES European Defence Agency Supported Project Obtain a real time reliable estimation of localization and classification of different type of threats. Disseminate this information in a proper manner optimizing the resources for neutralization. Design and development of: Low cost demonstrator. Multi-sensor vehicle protection system. Enhancing situational awareness. Providing C4ISR capabilities. Urban environment. 13/09/2012 Page 5
6 TECHNOLOGICAL CHALLENGES Sensors & data acquisition: Very different states of maturity (off-the-shelf, from scratch) Fusion of very different types of data. Different acquisition parameters (FoV, refreshing time, resolution). Processing & Fusion: Classification of threats. Temporal and spatial allignment of sensors and data fusion engine. Combination of field sensory and additional auxiliary data. Man-machine interface: Creating intuitive interface & Reducing cognitive load. Integration into a C4ISR system. Exploitation of the information provided by other systems on the battlefield. 13/09/2012 Page 6
7 PROJECT SCOPE European Defence Agency Supported Project Propose and develop several innovative concepts and approaches for a multi-sensor vehicle protection system. Implement a demonstrator including several of these concepts. Test these concepts and get some assessment about their utility. Describe the findings, establish some recommendations and produce a roadmap to achieve the goal. 13/09/2012 Page 7
8 PROJECT GUIDELINES Multi-sensor system: Millimetre-wave Radar. Millimetre-wave Radiometer. Infrared imaging system. Optical imaging system. European Defence Agency Supported Project Supported in addition by auxiliary data sources (e.g. images from UAVs and satellites). Incorporation of context and collateral intelligence information including the domain knowledge. Comprehensive data fusion mechanisms to exploit the synergies among the different sensors. The real time threat information is presented adequately through a specifically designed HMI. 13/09/2012 Page 8






9 PROPOSED SOLUTION low update rate UAV / satellite sensors auxiliary data maps, city models GPS position/orientation fusion a priori risk map ground sensors data processing & fusion candidate threats final fusion threat map high update rate 13/09/2012 Page 9
10 PROJECT OVERVIEW 13/09/2012 Page 10

.")



11 SUBSYSTEMS MAN-MACHINE INTERFACE (II) DESCRIPTION Geographical Information System: A Geographical Information System will be integrated in the MMI showing: Geo-referenced map (or even pictures). A Digital Terrain Model (DTM). Common Relevant Operational Picture, including: patrol position. pre-loaded intelligence data. detected threats. sensors vision area. routes if they are defined. others. Different layers and filters to show information. SUM The EDA PROJECT SUM Project 13/09/2012 Page 11
12 MMW RADAR (I) E-Band: GHz. Array of 4 transmitters, 4 receivers (horn antennas). Stand-alone system with own processing unit. European Defence Agency Supported Project Delivery of radar pictures in 3 different operational modes. Short reconstruction time for imaging. Feature extraction and list of targets by Constant False Alarm Rate postprocessing. Surveillance Mode High Resolution Mode Imaging Mode range with RCS=0.1 m 2 at reasonable false alarm rate >50m >50m >50m resolution in range >0.05 m >0.05 m 0.05 m resolution in azimuth 4 2 <2 field of view in azimuth dynamic range 50 db 50dB 50 db refresh period of data 1s 1s 10s power consumption 260+/- 40 W 260 +/- 40 W 500 +/- 50 W power supply 24VDC/ 230VAC 24VDC/ 230VAC 24VDC/ 230VAC 13/09/2012 Page 12


13 MMW RADAR (II) European Defence Agency Supported Project 13/09/2012 Page 13

. Proper drive rules for seesaw motion.")
14 RADIOMETER European Defence Agency Supported Project Technical main characteristics Spatial resolution 0.75 Image size elev. x azim. 30 x 80 Frame rate Sensitivity in the image Data rate 1 s < 2 K < 500 kb/s Estimated size 1.4 x 0.7 x 0.7 m 3 Estimated weight Detection range < 65 kg up to 100 m Solved challenges Low-cost system (only two receivers). Wide field of view at high frame rate. High-speed rotation of deflection plate (air resistance). Proper drive rules for seesaw motion. Low total receiver noise (attenuation of optical signal path) and high sensitivity. Compact design even for demonstrator. 13/09/2012 Page 14
, accurate ground grid is essential.")
15 VISUAL & IR CAMERAS European Defence Agency Supported Project Isolines projected on the frames to give a framework for localization of the threats. Fit is rather sensitive to the vehicle position (pitch), accurate ground grid is essential. 13/09/2012 Page 15

16 DATA FUSION European Defence Agency Supported Project Sensor weighted voting = f(auxiliary data) auxiliary data candidate threat fusion decision S 1 S 2 S 3 S 4 sensors "vote" for each candidate 13/09/2012 Page 16
17 MAN MACHINE INTERFACE (I) Provides effective mechanisms to convey the threats detected to the operator: GIS. Displaying the threats over the acquired images. Threat info viewer. Warnings: pop-up, voice warning. Reporting is configurable beforehand and on the field. Embedded into a vehicle-based C4ISR system: Sharing capabilities and equipment. Avoiding redundancies. Incorporation of C4ISR data: navigation, tactical information. Mission planning, monitoring and control and post-analysis. Access to external C4ISR systems (including info from UAVs and satellites). 13/09/2012 Page 17
18 MAN MACHINE INTERFACE (II) Sensor viewer: Displays the image acquired by the sensor. Allows switching between the visible camera, the infrared camera, the radiometer and the radar. Threats locations on the image. Threat info viewer: Detailed info about the current threats. Relative position: range, azimuth and elevation. GIS: Map of the area. Own position. Absolute positions of the threats. Sensor Viewer History (Image List). Threat Info History (Threat List). 13/09/2012 Page 18
 13/09/2012 Page")
19 MAN MACHINE INTERFACE (III) 13/09/2012 Page 19
 13/09/2012 Page")
20 MAN MACHINE INTERFACE (IV) 13/09/2012 Page 20
21 SUM DEMONSTRATOR DESCRIPTION

22 DEMONSTRATOR ARCHITECTURE 13/09/2012 Page 22
23 DEMONSTRATOR VEHICLE (I) Vehicle (Unimog) with all ground sensors will perform the demonstration trials: Ground sensors were mounted on the rooftop of the vehicle and will observe the area ahead. Sensor subsystems were connected to data fusion engine and MMI. Sensor operators supervised the subsystems from inside the vehicle. Vehicle operator supervised the data fusion results on the MMI. 13/09/2012 Page 23
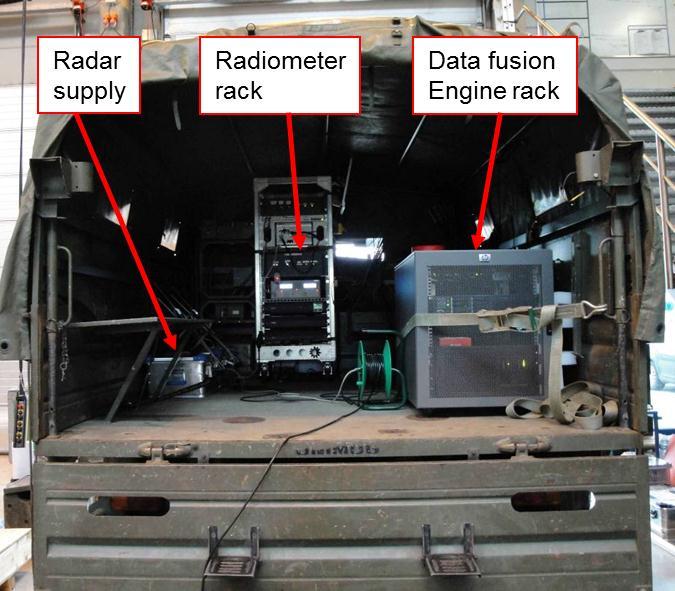

24 DEMONSTRATOR VEHICLE (II) 13/09/2012 Page 24
25 SUM ON-FIELD MAN-MACHINE INTERFACE (II) CAMPAIGNS Geographical Information System: A Geographical Information System will be integrated in the MMI showing: Geo-referenced map (or even pictures). A Digital Terrain Model (DTM). Common Relevant Operational Picture, including: patrol position. pre-loaded intelligence data. detected threats. sensors vision area. routes if they are defined. others. Different layers and filters to show information. SUM The EDA PROJECT SUM Project 13/09/2012 Page 25


26 DEMONSTRATION SITE (II) European Defence Agency Supported Project Heverlee military area coordinates: N; E Visitors room Scenario 13/09/2012 Page 26
27 DEMONSTRATION SCENARIOS Scenario 1: Two garbage bags at roadside. Scenario 2: Two cardboard boxes at roadside. Scenario 3: Two barrels at roadside, one standing, one laying. Scenario 4: Two barrels covered / camouflaged. Scenario 5: Two metallic trigger plates, one at roadside, one in the middle. Scenario 6: Two metallic trigger plates covered / camouflaged. Scenario 7: Two person at roadside, one with backpack. Scenario 8: Two person at roadside, one with RPG. 13/09/2012 Page 27

28 SCENARIO TRACK European Defence Agency Supported Project Stretch of road ca. 100 m long: 13/09/2012 Page 28



29 SAMPLE SCENARIO 1 European Defence Agency Supported Project Scenario with garbage bags (one explosive IED simulant): 13/09/2012 Page 29


:")
30 SAMPLE SCENARIO 4 European Defence Agency Supported Project Scenario with covered / camouflaged metallic barrels (one explosive IED simulant): 13/09/2012 Page 30


31 SAMPLE SCENARIO 7 Scenario with two persons (One person with explosive backpack simulant): European Defence Agency Supported Project 13/09/2012 Page 31
32 CONCLUSIONS & ROADMAP
33 CONCLUSIONS (I) Multi-sensor approach has been validated: Increase in potential sensory sources of threat detection. Radiometer, radar and image technologies have shown their feasibility for threat detection. Taking advantage of the synergies between them. Data Fusion is able to provide a better result than each one of the sensory technologies by itself. Improving the sensors technology directly leads to an enhancement in SUM performance. 13/09/2012 Page 33
34 CONCLUSIONS (II) The detection and localization of the threats should be focused on a multi-sensor approach to consolidate the advantages achieved by exploiting multiple signatures of a threat: Implementation of image processing algorithms detecting anomalous objects which represent suitable feature detectors of a potential threat. Advanced development of the radiometer and radar sensors for military platforms, getting adapted to severe constraints in weight, size, ergonomics and power autonomy for vehicle deployment. Incorporation of collateral information and domain knowledge. Implementation of enhanced fusion algorithms in order to search for threat patterns in the sensory data. Exploitation of the operative capabilities of the vehicle based system such as navigation, Geographical Information System and data from other C4I systems. 13/09/2012 Page 34
35 ROADMAP (I) SUM project has obtained promising results: Threat detection systems will incorporate several of its concepts. In any case, to properly follow SUM approach still some technological development is needed. Adaptation to Human Factors: Reduction of weight and size. Ergonomics. HMI to reduce the cognitive load. Specification of the system: It is fundamental to bring into the loop the players altogether. Coordination of actors involved: Ministries of Defence, military experts and industry. Technologies used in SUM: Room for the enhancement of the performance by improving sensors and algorithms. 13/09/2012 Page 35
36 ROADMAP (II) SUM system could take advantage of the incorporation of other sensory technologies. Power autonomy, power management methods, new materials and techniques for power supply. 3D Positioning and Navigation especially in Urban Environments. Incorporation and exploitation of the information provided by other systems on the battlefield. Improvements in communication capabilities such as Quality of Service and securing the network. 13/09/2012 Page 36



37 CA 1 Collective Survivability - Sniper Detection Thank you Oscar Tejedor Zorita otejedor@gmv.com GMV AD, 2009 Property of GMV All rights reserved
ISTAR Concepts & Solutions
 ISTAR Concepts & Solutions CDE Call Presentation Cardiff, 8 th September 2011 Today s Brief Introduction to the programme The opportunities ISTAR challenges The context Requirements for Novel Integrated
ISTAR Concepts & Solutions CDE Call Presentation Cardiff, 8 th September 2011 Today s Brief Introduction to the programme The opportunities ISTAR challenges The context Requirements for Novel Integrated
Customer Showcase > Defense and Intelligence
 Customer Showcase Skyline TerraExplorer is a critical visualization technology broadly deployed in defense and intelligence, public safety and security, 3D geoportals, and urban planning markets. It fuses
Customer Showcase Skyline TerraExplorer is a critical visualization technology broadly deployed in defense and intelligence, public safety and security, 3D geoportals, and urban planning markets. It fuses
WOLF - Wireless robust Link for urban Forces operations
 Executive summary - rev B - 01/05/2011 WOLF - Wireless robust Link for urban Forces operations The WOLF project, funded under the 2nd call for proposals of Joint Investment Program on Force Protection
Executive summary - rev B - 01/05/2011 WOLF - Wireless robust Link for urban Forces operations The WOLF project, funded under the 2nd call for proposals of Joint Investment Program on Force Protection
Unmanned Ground Military and Construction Systems Technology Gaps Exploration
 Unmanned Ground Military and Construction Systems Technology Gaps Exploration Eugeniusz Budny a, Piotr Szynkarczyk a and Józef Wrona b a Industrial Research Institute for Automation and Measurements Al.
Unmanned Ground Military and Construction Systems Technology Gaps Exploration Eugeniusz Budny a, Piotr Szynkarczyk a and Józef Wrona b a Industrial Research Institute for Automation and Measurements Al.
Technology Roadmapping. Lesson 3
 Technology Roadmapping Lesson 3 Leadership in Science & Technology Management Mission Vision Strategy Goals/ Implementation Strategy Roadmap Creation Portfolios Portfolio Roadmap Creation Project Prioritization
Technology Roadmapping Lesson 3 Leadership in Science & Technology Management Mission Vision Strategy Goals/ Implementation Strategy Roadmap Creation Portfolios Portfolio Roadmap Creation Project Prioritization
Introduction Objective and Scope p. 1 Generic Requirements p. 2 Basic Requirements p. 3 Surveillance System p. 3 Content of the Book p.
 Preface p. xi Acknowledgments p. xvii Introduction Objective and Scope p. 1 Generic Requirements p. 2 Basic Requirements p. 3 Surveillance System p. 3 Content of the Book p. 4 References p. 6 Maritime
Preface p. xi Acknowledgments p. xvii Introduction Objective and Scope p. 1 Generic Requirements p. 2 Basic Requirements p. 3 Surveillance System p. 3 Content of the Book p. 4 References p. 6 Maritime
Fraunhofer Institute for High frequency physics and radar techniques FHR. Unsere Kernkompetenzen
 Fraunhofer Institute for High frequency physics and radar techniques FHR Unsere Kernkompetenzen Unsere Kernkompetenzen KEY TECHnology radar 1 2 ABOUT Fraunhofer FHR As one of the largest radar research
Fraunhofer Institute for High frequency physics and radar techniques FHR Unsere Kernkompetenzen Unsere Kernkompetenzen KEY TECHnology radar 1 2 ABOUT Fraunhofer FHR As one of the largest radar research
Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications
 Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications AASHTO GIS-T Symposium April 2012 Table Of Contents Connected Vehicle Program Goals Mapping Technology
Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications AASHTO GIS-T Symposium April 2012 Table Of Contents Connected Vehicle Program Goals Mapping Technology
Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed
 AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Todd Hubing. Clemson Vehicular Electronics Laboratory Clemson University
 Todd Hubing Clemson Vehicular Electronics Laboratory Clemson University FCC Emissions Test Radiation from a shielded commercial product with attached cables May 28 2 Typical Field Strengths FCC Class A
Todd Hubing Clemson Vehicular Electronics Laboratory Clemson University FCC Emissions Test Radiation from a shielded commercial product with attached cables May 28 2 Typical Field Strengths FCC Class A
Phantom Dome - Advanced Drone Detection and jamming system
 Phantom Dome - Advanced Drone Detection and jamming system *Picture for illustration only 1 1. The emanating threat of drones In recent years the threat of drones has become increasingly vivid to many
Phantom Dome - Advanced Drone Detection and jamming system *Picture for illustration only 1 1. The emanating threat of drones In recent years the threat of drones has become increasingly vivid to many
Jager UAVs to Locate GPS Interference
 JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
AIR ROUTE SURVEILLANCE 3D RADAR
 AIR TRAFFIC MANAGEMENT AIR ROUTE SURVEILLANCE 3D RADAR Supplying ATM systems around the world for more than 30 years indracompany.com ARSR-10D3 AIR ROUTE SURVEILLANCE 3D RADAR ARSR 3D & MSSR Antenna Medium
AIR TRAFFIC MANAGEMENT AIR ROUTE SURVEILLANCE 3D RADAR Supplying ATM systems around the world for more than 30 years indracompany.com ARSR-10D3 AIR ROUTE SURVEILLANCE 3D RADAR ARSR 3D & MSSR Antenna Medium
Early Design Naval Systems of Systems Architectures Evaluation
 ABSTRACT Early Design Naval Systems of Systems Architectures Evaluation Mona Khoury Gilbert Durand DGA TN Avenue de la Tour Royale BP 40915-83 050 Toulon cedex FRANCE mona.khoury@dga.defense.gouv.fr A
ABSTRACT Early Design Naval Systems of Systems Architectures Evaluation Mona Khoury Gilbert Durand DGA TN Avenue de la Tour Royale BP 40915-83 050 Toulon cedex FRANCE mona.khoury@dga.defense.gouv.fr A
RIGEL RESM SYSTEM NAVAL
 RIGEL RESM SYSTEM NAVAL Defense and security systems in five continents indracompany.com RIGEL RESM RIGEL RESM SYSTEM NAVAL RIGEL RESM System The Naval based compact RESM system provides high performance
RIGEL RESM SYSTEM NAVAL Defense and security systems in five continents indracompany.com RIGEL RESM RIGEL RESM SYSTEM NAVAL RIGEL RESM System The Naval based compact RESM system provides high performance
THE modern airborne surveillance and reconnaissance
 INTL JOURNAL OF ELECTRONICS AND TELECOMMUNICATIONS, 2011, VOL. 57, NO. 1, PP. 37 42 Manuscript received January 19, 2011; revised February 2011. DOI: 10.2478/v10177-011-0005-z Radar and Optical Images
INTL JOURNAL OF ELECTRONICS AND TELECOMMUNICATIONS, 2011, VOL. 57, NO. 1, PP. 37 42 Manuscript received January 19, 2011; revised February 2011. DOI: 10.2478/v10177-011-0005-z Radar and Optical Images
Perception platform and fusion modules results. Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event
 Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
BUILDING A UNIVERSITY CONSORTIUM IN SPACE TECHNOLOGY IN TUNISIA
 THE 1 ST UNISEC-GLOBAL MEETING, 23-24 NOVEMBER 2013 THE UNIVERSITY OF TOKYO, JAPAN BUILDING A UNIVERSITY CONSORTIUM IN SPACE TECHNOLOGY IN TUNISIA Country Reports Prof Kamel BESBES Microelectronics & Instrumentation
THE 1 ST UNISEC-GLOBAL MEETING, 23-24 NOVEMBER 2013 THE UNIVERSITY OF TOKYO, JAPAN BUILDING A UNIVERSITY CONSORTIUM IN SPACE TECHNOLOGY IN TUNISIA Country Reports Prof Kamel BESBES Microelectronics & Instrumentation
Ultra Electronics Integrated Sonar Suite
 Sonar Systems Crown Copyright Ultra Electronics Integrated Sonar Suite COMPREHENSIVE NETWORK CENTRIC WARFARE SYSTEM COMPRISING: HULL-MOUNT SONAR VARIABLE DEPTH SONAR TORPEDO DEFENCE INNOVATION PERFORMANCE
Sonar Systems Crown Copyright Ultra Electronics Integrated Sonar Suite COMPREHENSIVE NETWORK CENTRIC WARFARE SYSTEM COMPRISING: HULL-MOUNT SONAR VARIABLE DEPTH SONAR TORPEDO DEFENCE INNOVATION PERFORMANCE
Next Generation Light/Medium Main Battle Tank Upgrade Solutions.
 Next Generation Light/Medium Main Battle Tank Upgrade Solutions www.aselsan.com.tr NEXT GENERATION LIGHT/MEDIUM MAIN BATTLE TANK UPGRADE SOLUTIONS ASELSAN presents her unrivalled Next Generation Light/Medium
Next Generation Light/Medium Main Battle Tank Upgrade Solutions www.aselsan.com.tr NEXT GENERATION LIGHT/MEDIUM MAIN BATTLE TANK UPGRADE SOLUTIONS ASELSAN presents her unrivalled Next Generation Light/Medium
Combining Ground Radars with Imaging Multisensors
 Combining Ground Radars with Imaging Multisensors FMV Sensors Symposium 2014 Anders GM Dahlberg Business Development Support & Key Account Manager anders.gm.dahlberg@flir.se Area surveillance day and night
Combining Ground Radars with Imaging Multisensors FMV Sensors Symposium 2014 Anders GM Dahlberg Business Development Support & Key Account Manager anders.gm.dahlberg@flir.se Area surveillance day and night
Assessing & Mitigation of risks on railways operational scenarios
 R H I N O S Railway High Integrity Navigation Overlay System Assessing & Mitigation of risks on railways operational scenarios Rome, June 22 nd 2017 Anja Grosch, Ilaria Martini, Omar Garcia Crespillo (DLR)
R H I N O S Railway High Integrity Navigation Overlay System Assessing & Mitigation of risks on railways operational scenarios Rome, June 22 nd 2017 Anja Grosch, Ilaria Martini, Omar Garcia Crespillo (DLR)
SSTDM 2014 _IUSSTF. Team of Students. 1.Sharwan Ram, 2. Abhishek Saini, 3. Ashok Tak, 4. Rahul E B, 5. Sourav Choudhury and 6.
 SSTDM 2014 _IUSSTF CANEUS SSTDM 2014 Technical Presentation of A Concept Paper on A UAV based Autonomous System for surveillance and proclamation of warning during disaster PI Dr. (Er.) Jayanta Kumar Ghosh,
SSTDM 2014 _IUSSTF CANEUS SSTDM 2014 Technical Presentation of A Concept Paper on A UAV based Autonomous System for surveillance and proclamation of warning during disaster PI Dr. (Er.) Jayanta Kumar Ghosh,
Monitoring of the Geo-Plasma Environment
 Monitoring of the Geo-Plasma Environment MOPLE N. Jakowski and S. S. M. Stankov MOPLE MOPLE submitted as as EoI EoIfor for FP6 FP6 by: by: Deutsches Zentrum für für Luft- Luft-und und Raumfahrt e.v. e.v.
Monitoring of the Geo-Plasma Environment MOPLE N. Jakowski and S. S. M. Stankov MOPLE MOPLE submitted as as EoI EoIfor for FP6 FP6 by: by: Deutsches Zentrum für für Luft- Luft-und und Raumfahrt e.v. e.v.
UNCLASSIFIED R-1 ITEM NOMENCLATURE FY 2013 OCO
 Exhibit R-2, RDT&E Budget Item Justification: PB 2013 Air Force DATE: February 2012 BA 3: Advanced Development (ATD) COST ($ in Millions) Program Element 75.103 74.009 64.557-64.557 61.690 67.075 54.973
Exhibit R-2, RDT&E Budget Item Justification: PB 2013 Air Force DATE: February 2012 BA 3: Advanced Development (ATD) COST ($ in Millions) Program Element 75.103 74.009 64.557-64.557 61.690 67.075 54.973
SAfety VEhicles using adaptive Interface Technology (SAVE-IT): A Program Overview
: A Program Overview") SAfety VEhicles using adaptive Interface Technology (SAVE-IT): A Program Overview SAVE-IT David W. Eby,, PhD University of Michigan Transportation Research Institute International Distracted Driving Conference
SAfety VEhicles using adaptive Interface Technology (SAVE-IT): A Program Overview SAVE-IT David W. Eby,, PhD University of Michigan Transportation Research Institute International Distracted Driving Conference
Fire Fighter Location Tracking & Status Monitoring Performance Requirements
 Fire Fighter Location Tracking & Status Monitoring Performance Requirements John A. Orr and David Cyganski orr@wpi.edu, cyganski@wpi.edu Electrical and Computer Engineering Department Worcester Polytechnic
Fire Fighter Location Tracking & Status Monitoring Performance Requirements John A. Orr and David Cyganski orr@wpi.edu, cyganski@wpi.edu Electrical and Computer Engineering Department Worcester Polytechnic
Mission Solution 300
 Mission Solution 300 Standard configuration for point defence Member of the Thales Mission Solution family Standard configuration of integrated sensors, effectors, CMS, communication system and navigation
Mission Solution 300 Standard configuration for point defence Member of the Thales Mission Solution family Standard configuration of integrated sensors, effectors, CMS, communication system and navigation
Model-Based Design for Sensor Systems
 2009 The MathWorks, Inc. Model-Based Design for Sensor Systems Stephanie Kwan Applications Engineer Agenda Sensor Systems Overview System Level Design Challenges Components of Sensor Systems Sensor Characterization
2009 The MathWorks, Inc. Model-Based Design for Sensor Systems Stephanie Kwan Applications Engineer Agenda Sensor Systems Overview System Level Design Challenges Components of Sensor Systems Sensor Characterization
White paper on SP25 millimeter wave radar
 White paper on SP25 millimeter wave radar Hunan Nanoradar Science and Technology Co.,Ltd. Version history Date Version Version description 2016-08-22 1.0 the 1 st version of white paper on SP25 Contents
White paper on SP25 millimeter wave radar Hunan Nanoradar Science and Technology Co.,Ltd. Version history Date Version Version description 2016-08-22 1.0 the 1 st version of white paper on SP25 Contents
STRIKE3 Standardization of GNSS Threat reporting and Receiver testing through International Knowledge Exchange, Experimentation and Exploitation
 Standardization of GNSS Threat reporting and Receiver testing through International Knowledge Exchange, Experimentation and Exploitation - Draft Standards for Receiver Testing Martin Pölöskey DGON/ESOC
Standardization of GNSS Threat reporting and Receiver testing through International Knowledge Exchange, Experimentation and Exploitation - Draft Standards for Receiver Testing Martin Pölöskey DGON/ESOC
Intelligent Surveillance and Management Functions for Airfield Applications Based on Low Cost Magnetic Field Detectors. Publishable Executive Summary
 Intelligent Surveillance and Management Functions for Airfield Applications Based on Low Cost Magnetic Field Detectors Publishable Executive Summary Project Co-ordinator Prof. Dr. Uwe Hartmann Saarland
Intelligent Surveillance and Management Functions for Airfield Applications Based on Low Cost Magnetic Field Detectors Publishable Executive Summary Project Co-ordinator Prof. Dr. Uwe Hartmann Saarland
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results
 SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
Mission Solution 100
 Mission Solution 100 Standard configuration for littoral security Member of the Thales Mission Solution family Standard configuration of integrated sensors, effectors, CMS, communication system and navigation
Mission Solution 100 Standard configuration for littoral security Member of the Thales Mission Solution family Standard configuration of integrated sensors, effectors, CMS, communication system and navigation
Special Projects Office. Mr. Lee R. Moyer Special Projects Office. DARPATech September 2000
 Mr. Lee R. Moyer DARPATech 2000 6-8 September 2000 1 CC&D Tactics Pose A Challenge to U.S. Targeting Systems The Challenge: Camouflage, Concealment and Deception techniques include: Masking: Foliage cover,
Mr. Lee R. Moyer DARPATech 2000 6-8 September 2000 1 CC&D Tactics Pose A Challenge to U.S. Targeting Systems The Challenge: Camouflage, Concealment and Deception techniques include: Masking: Foliage cover,
ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit)
") Exhibit R-2 0602308A Advanced Concepts and Simulation ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit) FY 2005 FY 2006 FY 2007 FY 2008 FY 2009 FY 2010 FY 2011 Total Program Element (PE) Cost 22710 27416
Exhibit R-2 0602308A Advanced Concepts and Simulation ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit) FY 2005 FY 2006 FY 2007 FY 2008 FY 2009 FY 2010 FY 2011 Total Program Element (PE) Cost 22710 27416
MILITARY RADAR TRENDS AND ANALYSIS REPORT
 MILITARY RADAR TRENDS AND ANALYSIS REPORT 2016 CONTENTS About the research 3 Analysis of factors driving innovation and demand 4 Overview of challenges for R&D and implementation of new radar 7 Analysis
MILITARY RADAR TRENDS AND ANALYSIS REPORT 2016 CONTENTS About the research 3 Analysis of factors driving innovation and demand 4 Overview of challenges for R&D and implementation of new radar 7 Analysis
The LVCx Framework. The LVCx Framework An Advanced Framework for Live, Virtual and Constructive Experimentation
 An Advanced Framework for Live, Virtual and Constructive Experimentation An Advanced Framework for Live, Virtual and Constructive Experimentation The CSIR has a proud track record spanning more than ten
An Advanced Framework for Live, Virtual and Constructive Experimentation An Advanced Framework for Live, Virtual and Constructive Experimentation The CSIR has a proud track record spanning more than ten
I&S REASONING AND OBJECT-ORIENTED DATA PROCESSING FOR MULTISENSOR DATA FUSION
 I&S REASONING AND OBJECT-ORIENTED DATA PROCESSING FOR MULTISENSOR DATA FUSION A dvanced information technologies provide indispensable contribution to peacekeeping and other crisis response operations.
I&S REASONING AND OBJECT-ORIENTED DATA PROCESSING FOR MULTISENSOR DATA FUSION A dvanced information technologies provide indispensable contribution to peacekeeping and other crisis response operations.
The Army s Future Tactical UAS Technology Demonstrator Program
 The Army s Future Tactical UAS Technology Demonstrator Program This information product has been reviewed and approved for public release, distribution A (Unlimited). Review completed by the AMRDEC Public
The Army s Future Tactical UAS Technology Demonstrator Program This information product has been reviewed and approved for public release, distribution A (Unlimited). Review completed by the AMRDEC Public
Finnish Software Radio Programme
 Centre for Wireless Communications CWC Finnish Software Radio Programme Visa Tapio, Ari Pouttu, Matti Raustia University of Oulu/Centre for Wireless Communications P.O.Box 4500 Tutkijantie 2E FIN-90014
Centre for Wireless Communications CWC Finnish Software Radio Programme Visa Tapio, Ari Pouttu, Matti Raustia University of Oulu/Centre for Wireless Communications P.O.Box 4500 Tutkijantie 2E FIN-90014
Networked Targeting Technology
 Networked Targeting Technology Stephen Welby Next Generation Time Critical Targeting Future Battlespace Dominance Requires the Ability to Hold Opposing Forces at Risk: At Any Time In Any Weather Fixed,
Networked Targeting Technology Stephen Welby Next Generation Time Critical Targeting Future Battlespace Dominance Requires the Ability to Hold Opposing Forces at Risk: At Any Time In Any Weather Fixed,
LEADING THE WAY FROM SEA TO LAND SURVEILLANCE RADAR SOLUTIONS
 LEADING THE WAY FROM SEA TO LAND SURVEILLANCE RADAR SOLUTIONS SITUATIONAL INTELLIGENCE, THE WORLD OVER A Kelvin Hughes radar is the primary tool for long range threat detection. On land and at sea we provide
LEADING THE WAY FROM SEA TO LAND SURVEILLANCE RADAR SOLUTIONS SITUATIONAL INTELLIGENCE, THE WORLD OVER A Kelvin Hughes radar is the primary tool for long range threat detection. On land and at sea we provide
The C2/C4ISR Systems Market
 4.4 Global C2/C4ISR Systems Land Based Submarket Table 4.4 Global C2/C4ISR Systems Land Based Submarket Forecast 213-2 ($bn, AGR, CAGR, Cumulative) 212 213 214 21 216 217 218 219 22 221 222 2 213- Sales
4.4 Global C2/C4ISR Systems Land Based Submarket Table 4.4 Global C2/C4ISR Systems Land Based Submarket Forecast 213-2 ($bn, AGR, CAGR, Cumulative) 212 213 214 21 216 217 218 219 22 221 222 2 213- Sales
3D LANZA RADAR FAMILY
 3D LANZA RADAR FAMILY Surveillance in five continents indracompany.com LANZA-LRR/ LANZA-MRR/ LANZA-LTR 3D LANZA RADAR FAMILY Transportable 3D Radar Mobile 3D Radar (Trailer) Mobile 3D Radar (Truck Mounted)
3D LANZA RADAR FAMILY Surveillance in five continents indracompany.com LANZA-LRR/ LANZA-MRR/ LANZA-LTR 3D LANZA RADAR FAMILY Transportable 3D Radar Mobile 3D Radar (Trailer) Mobile 3D Radar (Truck Mounted)
Systematic Image Processing of the Small Satellite Mission BIRD
 Systematic Image Processing of the Small Satellite Mission BIRD Klaus Brieß 1, Eckehard Lorenz 2 1 Technische Universität Berlin, Institut für Luft und Raumfahrt, Marchstr.12, D-10587 Berlin 2 Deutsches
Systematic Image Processing of the Small Satellite Mission BIRD Klaus Brieß 1, Eckehard Lorenz 2 1 Technische Universität Berlin, Institut für Luft und Raumfahrt, Marchstr.12, D-10587 Berlin 2 Deutsches
Ka-Band Systems and Processing Approaches for Simultaneous High-Resolution Wide-Swath SAR Imaging and Ground Moving Target Indication
 Ka-Band Systems and Processing Approaches for Simultaneous High-Resolution Wide-Swath SAR Imaging and Ground Moving Target Indication Advanced RF Sensors and Remote Sensing Instruments 2014 Ka-band Earth
Ka-Band Systems and Processing Approaches for Simultaneous High-Resolution Wide-Swath SAR Imaging and Ground Moving Target Indication Advanced RF Sensors and Remote Sensing Instruments 2014 Ka-band Earth
HALS-H1 Ground Surveillance & Targeting Helicopter
 ARATOS-SWISS Homeland Security AG & SMA PROGRESS, LLC HALS-H1 Ground Surveillance & Targeting Helicopter Defense, Emergency, Homeland Security (Border Patrol, Pipeline Monitoring)... Automatic detection
ARATOS-SWISS Homeland Security AG & SMA PROGRESS, LLC HALS-H1 Ground Surveillance & Targeting Helicopter Defense, Emergency, Homeland Security (Border Patrol, Pipeline Monitoring)... Automatic detection
AstroBus S, the high performance and competitive Small Satellites platform for Earth Observation
 AstroBus S, the high performance and competitive Small Satellites platform for Earth Observation Dr. Jean Cheganças 10th IAA Symposium on Small Satellites for Earth Observation April 20-24, 2015 Berlin,
AstroBus S, the high performance and competitive Small Satellites platform for Earth Observation Dr. Jean Cheganças 10th IAA Symposium on Small Satellites for Earth Observation April 20-24, 2015 Berlin,
DLR Project ADVISE-PRO Advanced Visual System for Situation Awareness Enhancement Prototype Introduction The Project ADVISE-PRO
 DLR Project ADVISE-PRO Advanced Visual System for Situation Awareness Enhancement Prototype Dr. Bernd Korn DLR, Institute of Flight Guidance Lilienthalplatz 7 38108 Braunschweig Bernd.Korn@dlr.de phone
DLR Project ADVISE-PRO Advanced Visual System for Situation Awareness Enhancement Prototype Dr. Bernd Korn DLR, Institute of Flight Guidance Lilienthalplatz 7 38108 Braunschweig Bernd.Korn@dlr.de phone
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
A study on facility management application scenario of BIMGIS modeling data
 International Journal of Engineering Science Invention ISSN (Online): 2319 6734, ISSN (Print): 2319 6726 Volume 6 Issue 11 November 2017 PP. 40-45 A study on facility management application scenario of
International Journal of Engineering Science Invention ISSN (Online): 2319 6734, ISSN (Print): 2319 6726 Volume 6 Issue 11 November 2017 PP. 40-45 A study on facility management application scenario of
Integrating SAASM GPS and Inertial Navigation: What to Know
 Integrating SAASM GPS and Inertial Navigation: What to Know At any moment, a mission could be threatened with potentially severe consequences because of jamming and spoofing aimed at global navigation
Integrating SAASM GPS and Inertial Navigation: What to Know At any moment, a mission could be threatened with potentially severe consequences because of jamming and spoofing aimed at global navigation
PREPARATORY ACTION ON DEFENCE RESEARCH
 PREPARATORY ACTION ON DEFENCE RESEARCH SESSION Technology Foresight INFODAY AND BROKERAGE EVENT 12 APRIL 2018 PREPARATORY ACTION ON DEFENCE RESEARCH Call Text presentation CSA Topic Call PADR-STF-02-2018
PREPARATORY ACTION ON DEFENCE RESEARCH SESSION Technology Foresight INFODAY AND BROKERAGE EVENT 12 APRIL 2018 PREPARATORY ACTION ON DEFENCE RESEARCH Call Text presentation CSA Topic Call PADR-STF-02-2018
GALILEO Research and Development Activities. Second Call. Area 3. Statement of Work
 GALILEO Research and Development Activities Second Call Area 3 Innovation by Small and Medium Enterprises Statement of Work Rue du Luxembourg, 3 B 1000 Brussels Tel +32 2 507 80 00 Fax +32 2 507 80 01
GALILEO Research and Development Activities Second Call Area 3 Innovation by Small and Medium Enterprises Statement of Work Rue du Luxembourg, 3 B 1000 Brussels Tel +32 2 507 80 00 Fax +32 2 507 80 01
Detection Technologies and Systems for Humanitarian Demining: Overview of the GICHD Guidebook and Review of Conclusions
 Detection Technologies and Systems for Humanitarian Demining: Overview of the GICHD Guidebook and Review of Conclusions C. Bruschini a, H. Sahli b, A. Carruthers c a CBR Scientific Consulting, Lausanne,
Detection Technologies and Systems for Humanitarian Demining: Overview of the GICHD Guidebook and Review of Conclusions C. Bruschini a, H. Sahli b, A. Carruthers c a CBR Scientific Consulting, Lausanne,
X-WALD. Avionic X-band Weather signal modeling and processing validation through real Data acquisition and analysis
 X-WALD Avionic X-band Weather signal modeling and processing validation through real Data acquisition and analysis State of the art Background All civil airplanes and military transport aircrafts are equipped
X-WALD Avionic X-band Weather signal modeling and processing validation through real Data acquisition and analysis State of the art Background All civil airplanes and military transport aircrafts are equipped
Virtual Reality Devices in C2 Systems
 Jan Hodicky, Petr Frantis University of Defence Brno 65 Kounicova str. Brno Czech Republic +420973443296 jan.hodicky@unbo.cz petr.frantis@unob.cz Virtual Reality Devices in C2 Systems Topic: Track 8 C2
Jan Hodicky, Petr Frantis University of Defence Brno 65 Kounicova str. Brno Czech Republic +420973443296 jan.hodicky@unbo.cz petr.frantis@unob.cz Virtual Reality Devices in C2 Systems Topic: Track 8 C2
vstasker 6 A COMPLETE MULTI-PURPOSE SOFTWARE TO SPEED UP YOUR SIMULATION PROJECT, FROM DESIGN TIME TO DEPLOYMENT REAL-TIME SIMULATION TOOLKIT FEATURES
 REAL-TIME SIMULATION TOOLKIT A COMPLETE MULTI-PURPOSE SOFTWARE TO SPEED UP YOUR SIMULATION PROJECT, FROM DESIGN TIME TO DEPLOYMENT Diagram based Draw your logic using sequential function charts and let
REAL-TIME SIMULATION TOOLKIT A COMPLETE MULTI-PURPOSE SOFTWARE TO SPEED UP YOUR SIMULATION PROJECT, FROM DESIGN TIME TO DEPLOYMENT Diagram based Draw your logic using sequential function charts and let
DVT Research Group A joint research group between Ilmenau University of Technology and Fraunhofer Institute for Integrated Circuits IIS
 DVT Research Group A joint research group between Ilmenau University of Technology and Fraunhofer Institute for Integrated Circuits IIS Ilmenau, November 12th, 2014 Prof. Giovanni Del Galdo The DVT Research
DVT Research Group A joint research group between Ilmenau University of Technology and Fraunhofer Institute for Integrated Circuits IIS Ilmenau, November 12th, 2014 Prof. Giovanni Del Galdo The DVT Research
COGNITIVE ANTENNA RADIO SYSTEMS FOR MOBILE SATELLITE AND MULTIMODAL COMMUNICATIONS ESA/ESTEC, NOORDWIJK, THE NETHERLANDS 3-5 OCTOBER 2012
 COGNITIVE ANTENNA RADIO SYSTEMS FOR MOBILE SATELLITE AND MULTIMODAL COMMUNICATIONS ESA/ESTEC, NOORDWIJK, THE NETHERLANDS 3-5 OCTOBER 2012 Norbert Niklasch (1) (1) IABG mbh, Einsteinstrasse 20, D-85521
COGNITIVE ANTENNA RADIO SYSTEMS FOR MOBILE SATELLITE AND MULTIMODAL COMMUNICATIONS ESA/ESTEC, NOORDWIJK, THE NETHERLANDS 3-5 OCTOBER 2012 Norbert Niklasch (1) (1) IABG mbh, Einsteinstrasse 20, D-85521
Relative Cost and Performance Comparison of GEO Space Situational Awareness Architectures
 Relative Cost and Performance Comparison of GEO Space Situational Awareness Architectures Background Keith Morris Lockheed Martin Space Systems Company Chris Rice Lockheed Martin Space Systems Company
Relative Cost and Performance Comparison of GEO Space Situational Awareness Architectures Background Keith Morris Lockheed Martin Space Systems Company Chris Rice Lockheed Martin Space Systems Company
The Challenge: Increasing Accuracy and Decreasing Cost
 Solving Mobile Radar Measurement Challenges By Dingqing Lu, Keysight Technologies, Inc. Modern radar systems are exceptionally complex, encompassing intricate constructions with advanced technology from
Solving Mobile Radar Measurement Challenges By Dingqing Lu, Keysight Technologies, Inc. Modern radar systems are exceptionally complex, encompassing intricate constructions with advanced technology from
Ground Robotics Capability Conference and Exhibit. Mr. George Solhan Office of Naval Research Code March 2010
 Ground Robotics Capability Conference and Exhibit Mr. George Solhan Office of Naval Research Code 30 18 March 2010 1 S&T Focused on Naval Needs Broad FY10 DON S&T Funding = $1,824M Discovery & Invention
Ground Robotics Capability Conference and Exhibit Mr. George Solhan Office of Naval Research Code 30 18 March 2010 1 S&T Focused on Naval Needs Broad FY10 DON S&T Funding = $1,824M Discovery & Invention
Weaponizing the Spectrum
 Weaponizing the Spectrum Presentation at the NDIA Disruptive Technologies Conference 4 September 2007 by Kalle R. Kontson Alion Science and Technology Phone: 240-646-3620 Email: kkontson@alionscience.com
Weaponizing the Spectrum Presentation at the NDIA Disruptive Technologies Conference 4 September 2007 by Kalle R. Kontson Alion Science and Technology Phone: 240-646-3620 Email: kkontson@alionscience.com
Unmanned on-orbit servicing (OOS), ROKVISS and the TECSAS mission
, ROKVISS and the TECSAS mission") In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 On-Orbit Servicing (OOS), ROKVISS and
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 On-Orbit Servicing (OOS), ROKVISS and
Intelligent driving TH« TNO I Innovation for live
 Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Combining High Dynamic Range Photography and High Range Resolution RADAR for Pre-discharge Threat Cues
 Combining High Dynamic Range Photography and High Range Resolution RADAR for Pre-discharge Threat Cues Nikola Subotic Nikola.Subotic@mtu.edu DISTRIBUTION STATEMENT A. Approved for public release; distribution
Combining High Dynamic Range Photography and High Range Resolution RADAR for Pre-discharge Threat Cues Nikola Subotic Nikola.Subotic@mtu.edu DISTRIBUTION STATEMENT A. Approved for public release; distribution
COSMOS 2020 Infoday Bratislava Space Call 2015
 DLR.de Chart 1 COSMOS 2020 Infoday Bratislava Space Call 2015 Marc Jochemich DLR - German Aerospace Center Space Administration DLR.de Chart 2 https://ec.europa.eu/research/participants/portal/ DLR.de
DLR.de Chart 1 COSMOS 2020 Infoday Bratislava Space Call 2015 Marc Jochemich DLR - German Aerospace Center Space Administration DLR.de Chart 2 https://ec.europa.eu/research/participants/portal/ DLR.de
Addressing the Challenges of Radar and EW System Design and Test using a Model-Based Platform
 Addressing the Challenges of Radar and EW System Design and Test using a Model-Based Platform By Dingqing Lu, Agilent Technologies Radar systems have come a long way since their introduction in the Today
Addressing the Challenges of Radar and EW System Design and Test using a Model-Based Platform By Dingqing Lu, Agilent Technologies Radar systems have come a long way since their introduction in the Today
Projekt Sichere Intelligente Mobilität Testfeld Deutschland. Project Safe Intelligent Mobilty Test Field Germany
 Projekt Sichere Intelligente Mobilität Testfeld Deutschland Project Safe Intelligent Mobilty Test Field Germany ETSI TC ITS Workshop 4-6 February 2009 ETSI, Sophia Antipolis, France Dr. Christian Weiß,
Projekt Sichere Intelligente Mobilität Testfeld Deutschland Project Safe Intelligent Mobilty Test Field Germany ETSI TC ITS Workshop 4-6 February 2009 ETSI, Sophia Antipolis, France Dr. Christian Weiß,
Wide-area Motion Imagery for Multi-INT Situational Awareness
 Wide-area Motion Imagery for Multi-INT Situational Awareness Bernard V. Brower Jason Baker Brian Wenink Harris Corporation TABLE OF CONTENTS ABSTRACT... 3 INTRODUCTION WAMI HISTORY... 4 WAMI Capabilities
Wide-area Motion Imagery for Multi-INT Situational Awareness Bernard V. Brower Jason Baker Brian Wenink Harris Corporation TABLE OF CONTENTS ABSTRACT... 3 INTRODUCTION WAMI HISTORY... 4 WAMI Capabilities
Interoperability for Critical Situations
 Interoperability for Critical Situations Disaster: Relief and Management International Cooperation & Role of ICT Alexandria, Egypt, 16 April 2007 Virna Tomaselli, virna.tomaselli@selex-comms.com 16/04/2007
Interoperability for Critical Situations Disaster: Relief and Management International Cooperation & Role of ICT Alexandria, Egypt, 16 April 2007 Virna Tomaselli, virna.tomaselli@selex-comms.com 16/04/2007
UNCLASSIFIED. UNCLASSIFIED R-1 Line Item #13 Page 1 of 11
 Exhibit R-2, PB 2010 Air Force RDT&E Budget Item Justification DATE: May 2009 Applied Research COST ($ in Millions) FY 2008 Actual FY 2009 FY 2010 FY 2011 FY 2012 FY 2013 FY 2014 FY 2015 Cost To Complete
Exhibit R-2, PB 2010 Air Force RDT&E Budget Item Justification DATE: May 2009 Applied Research COST ($ in Millions) FY 2008 Actual FY 2009 FY 2010 FY 2011 FY 2012 FY 2013 FY 2014 FY 2015 Cost To Complete
DEFENSE and SECURITY RIGEL ES AND. Defense and security in five continents. indracompany.com
 DEFENSE and SECURITY RIGEL ES AND EA Systems Defense and security in five continents indracompany.com RIGEL ES EA Systems RIGEL ES AND EA Systems RIGEL ES System The Naval Radar ES and EA systems provide
DEFENSE and SECURITY RIGEL ES AND EA Systems Defense and security in five continents indracompany.com RIGEL ES EA Systems RIGEL ES AND EA Systems RIGEL ES System The Naval Radar ES and EA systems provide
GamECAR JULY ULY Meetings. 5 Toward the future. 5 Consortium. E Stay updated
 NEWSLETTER 1 ULY 2017 JULY The project engine has started and there is a long way to go, but we aim at consuming as less gas as possible! It will be a game, but a serious one. Playing it for real, while
NEWSLETTER 1 ULY 2017 JULY The project engine has started and there is a long way to go, but we aim at consuming as less gas as possible! It will be a game, but a serious one. Playing it for real, while
TRINITY Standard configuration for littoral defence
 Standard configuration for littoral defence Member of the Thales Mission Solution family Unrivalled tracking and fire control solution for small manoeuvring targets Innovative approach and easy to install
Standard configuration for littoral defence Member of the Thales Mission Solution family Unrivalled tracking and fire control solution for small manoeuvring targets Innovative approach and easy to install
EXECUTIVE SUMMARY IDEALS
 Saab Systems 1 (18) EXECUTIVE SUMMARY for IDEALS Saab Systems 2 (18) Table of Contents 1 SUMMARY...3 2 OVERVIEW OF THE IDEALS PROJECT...4 2.1 Identity...4 2.2 Project Organisation...4 2.3 Project Objectives
Saab Systems 1 (18) EXECUTIVE SUMMARY for IDEALS Saab Systems 2 (18) Table of Contents 1 SUMMARY...3 2 OVERVIEW OF THE IDEALS PROJECT...4 2.1 Identity...4 2.2 Project Organisation...4 2.3 Project Objectives
Detection of traffic congestion in airborne SAR imagery
 Detection of traffic congestion in airborne SAR imagery Gintautas Palubinskas and Hartmut Runge German Aerospace Center DLR Remote Sensing Technology Institute Oberpfaffenhofen, 82234 Wessling, Germany
Detection of traffic congestion in airborne SAR imagery Gintautas Palubinskas and Hartmut Runge German Aerospace Center DLR Remote Sensing Technology Institute Oberpfaffenhofen, 82234 Wessling, Germany
Situation Awareness in Network Based Command & Control Systems
 Situation Awareness in Network Based Command & Control Systems Dr. Håkan Warston eucognition Meeting Munich, January 12, 2007 1 Products and areas of technology Radar systems technology Microwave and antenna
Situation Awareness in Network Based Command & Control Systems Dr. Håkan Warston eucognition Meeting Munich, January 12, 2007 1 Products and areas of technology Radar systems technology Microwave and antenna
Tailored Tactical Surveillance
 Mr. Tim Clark Program Manager Special Projects Office At our last DARPATech, the Special Projects Office (SPO) discussed the need for persistent global and theater surveillance and how, by advancing the
Mr. Tim Clark Program Manager Special Projects Office At our last DARPATech, the Special Projects Office (SPO) discussed the need for persistent global and theater surveillance and how, by advancing the
Concertation Meeting Brussels, 24/3/2003
 EUDEM2: The EU in humanitarian DEMining - Phase 2. Present and Future of Humanitarian Demining Research Concertation Meeting Brussels, 24/3/2003 1 Presentation Overview EUDEM2 Project Overview EUDEM2 Main
EUDEM2: The EU in humanitarian DEMining - Phase 2. Present and Future of Humanitarian Demining Research Concertation Meeting Brussels, 24/3/2003 1 Presentation Overview EUDEM2 Project Overview EUDEM2 Main
The Future of Land-Based EW Eyal Danan, VP General Manager EW SIGINT & Comm. Division. unclassified Proprietary Information of IAI Slide 1
 The Future of Land-Based EW Eyal Danan, VP General Manager EW SIGINT & Comm. Division Proprietary Information of IAI Slide 1 The Dual Nature of Conflicts Clear, Defined, Limited Battlefield Saturated Civilian
The Future of Land-Based EW Eyal Danan, VP General Manager EW SIGINT & Comm. Division Proprietary Information of IAI Slide 1 The Dual Nature of Conflicts Clear, Defined, Limited Battlefield Saturated Civilian
INTERNATIONAL CIVIL AVIATION ORGANIZATION
 INTERNATIONAL CIVIL AVIATION ORGANIZATION AFI PLANNING AND IMPLEMENTATION REGIONAL GROUP EIGHTEENTH MEETING (APIRG/18) Kampala, Uganda (27 30 March 2012) Agenda Item 3: Performance Framework for Regional
INTERNATIONAL CIVIL AVIATION ORGANIZATION AFI PLANNING AND IMPLEMENTATION REGIONAL GROUP EIGHTEENTH MEETING (APIRG/18) Kampala, Uganda (27 30 March 2012) Agenda Item 3: Performance Framework for Regional
Reprint (R43) Polarmetric and Hyperspectral Imaging for Detection of Camouflaged Objects. Gooch & Housego. June 2009
 Polarmetric and Hyperspectral Imaging for Detection of Camouflaged Objects. Gooch & Housego. June 2009") Reprint (R43) Polarmetric and Hyperspectral Imaging for Detection of Camouflaged Objects Gooch & Housego June 2009 Gooch & Housego 4632 36 th Street, Orlando, FL 32811 Tel: 1 407 422 3171 Fax: 1 407 648
Reprint (R43) Polarmetric and Hyperspectral Imaging for Detection of Camouflaged Objects Gooch & Housego June 2009 Gooch & Housego 4632 36 th Street, Orlando, FL 32811 Tel: 1 407 422 3171 Fax: 1 407 648
Joint Industry Program: Development of Improved Ice Management Capabilities for Operations in Arctic and Harsh Environments.
 Joint Industry Program: Development of Improved Ice Management Capabilities for Operations in Arctic and Harsh Environments November 2014 This page is intentionally blank. 2 Introduction Petroleum Research
Joint Industry Program: Development of Improved Ice Management Capabilities for Operations in Arctic and Harsh Environments November 2014 This page is intentionally blank. 2 Introduction Petroleum Research
Advanced Technology Solutions. Microwave Materials
 Advanced Technology Solutions Microwave Materials BAE SYSTEMS is an international company engaged in the development, delivery and support of advanced defence systems in the air, on land, at sea and in
Advanced Technology Solutions Microwave Materials BAE SYSTEMS is an international company engaged in the development, delivery and support of advanced defence systems in the air, on land, at sea and in
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Cover. DLR-ESA Workshop on ARTES-11. SGEO: Implementation of of Artes-11. Dr. Andreas Winkler
 Cover DLR-ESA Workshop on ARTES-11 SGEO: Implementation of of Artes-11 Dr. Andreas Winkler June June29, 29, 2006 2006 Tegernsee, Tegernsee, Germany Germany Slide 1 Table Table of of Contents - Introduction
Cover DLR-ESA Workshop on ARTES-11 SGEO: Implementation of of Artes-11 Dr. Andreas Winkler June June29, 29, 2006 2006 Tegernsee, Tegernsee, Germany Germany Slide 1 Table Table of of Contents - Introduction
FRAUNHOFER INSTITUTE FOR OPEN COMMUNICATION SYSTEMS FOKUS COMPETENCE CENTER VISCOM
 FRAUNHOFER INSTITUTE FOR OPEN COMMUNICATION SYSTEMS FOKUS COMPETENCE CENTER VISCOM SMART ALGORITHMS FOR BRILLIANT PICTURES The Competence Center Visual Computing of Fraunhofer FOKUS develops visualization
FRAUNHOFER INSTITUTE FOR OPEN COMMUNICATION SYSTEMS FOKUS COMPETENCE CENTER VISCOM SMART ALGORITHMS FOR BRILLIANT PICTURES The Competence Center Visual Computing of Fraunhofer FOKUS develops visualization
Microwave Remote Sensing
 Provide copy on a CD of the UCAR multi-media tutorial to all in class. Assign Ch-7 and Ch-9 (for two weeks) as reading material for this class. HW#4 (Due in two weeks) Problems 1,2,3 and 4 (Chapter 7)
Provide copy on a CD of the UCAR multi-media tutorial to all in class. Assign Ch-7 and Ch-9 (for two weeks) as reading material for this class. HW#4 (Due in two weeks) Problems 1,2,3 and 4 (Chapter 7)
GPS data correction using encoders and INS sensors
 GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
TActical Sensor network TEst bed (TASTE)
") TActical Sensor network TEst bed (TASTE) Drs. Ir. Ph. van Dorp 1, Dr. H.H.P.Th. Bekman 1 and Ing. R.D.J. Sandbrink 1 1 TNO Defence, Security and Safety The Hague, The Netherlands www.tno.nl Abstract TASTE
TActical Sensor network TEst bed (TASTE) Drs. Ir. Ph. van Dorp 1, Dr. H.H.P.Th. Bekman 1 and Ing. R.D.J. Sandbrink 1 1 TNO Defence, Security and Safety The Hague, The Netherlands www.tno.nl Abstract TASTE
Measuring GALILEOs multipath channel
 Measuring GALILEOs multipath channel Alexander Steingass German Aerospace Center Münchnerstraße 20 D-82230 Weßling, Germany alexander.steingass@dlr.de Co-Authors: Andreas Lehner, German Aerospace Center,
Measuring GALILEOs multipath channel Alexander Steingass German Aerospace Center Münchnerstraße 20 D-82230 Weßling, Germany alexander.steingass@dlr.de Co-Authors: Andreas Lehner, German Aerospace Center,
Active Road Management Assisted by Satellite. ARMAS Phase II
 Active Road Management Assisted by Satellite ARMAS Phase II European Roundtable on Intelligent Roads Brussels, 26 January 2006 1 2 Table of Contents Overview of ARMAS System Architecture Field Trials Conclusions
Active Road Management Assisted by Satellite ARMAS Phase II European Roundtable on Intelligent Roads Brussels, 26 January 2006 1 2 Table of Contents Overview of ARMAS System Architecture Field Trials Conclusions
ALR-400 RADAR WARNING RECEIVER
 AIBORNE DEFENSE SYSTEMS RADAR WARNING RECEIVER Defense and security systems in five continents indracompany.com RADAR WARNING RECEIVER Technical description leading edge field proven wideband digital reception
AIBORNE DEFENSE SYSTEMS RADAR WARNING RECEIVER Defense and security systems in five continents indracompany.com RADAR WARNING RECEIVER Technical description leading edge field proven wideband digital reception
HTZ warfare MILITARY COMMUNICATION NETWORKS TECHNICAL SPECTRUM MANAGEMENT THE REFERENCE TOOL FOR ELECTRONIC WARFARE & TACTICAL COMMUNICATIONS
 THE REFERENCE TOOL FOR ELECTRONIC WARFARE & TACTICAL COMMUNICATIONS MILITARY COMMUNICATION NETWORKS ACCURATE BATTLEFIELD SIMULATION TECHNICAL SPECTRUM MANAGEMENT the most comprehensive radio planning solution
THE REFERENCE TOOL FOR ELECTRONIC WARFARE & TACTICAL COMMUNICATIONS MILITARY COMMUNICATION NETWORKS ACCURATE BATTLEFIELD SIMULATION TECHNICAL SPECTRUM MANAGEMENT the most comprehensive radio planning solution
MSPO 2017: POLISH RADAR CAPABILITIES
 aut. Maksymilian Dura 08.09.2017 MSPO 2017: POLISH RADAR CAPABILITIES MSPO International Defence Industry Exhibition organized in Kielce is yet another occasion for the PIT-RADWAR company to show that
aut. Maksymilian Dura 08.09.2017 MSPO 2017: POLISH RADAR CAPABILITIES MSPO International Defence Industry Exhibition organized in Kielce is yet another occasion for the PIT-RADWAR company to show that
Situational Awareness Object (SAO), A Simple, Yet Powerful Tool for Operational C2 Systems
, A Simple, Yet Powerful Tool for Operational C2 Systems") 2006 CCRTS The State of the Art and the State of the Practice Situational Awareness Object (SAO), A Simple, Yet Powerful Tool for Operational C2 Systems Cognitive Domain Issues C2 Experimentation C2 Modeling
2006 CCRTS The State of the Art and the State of the Practice Situational Awareness Object (SAO), A Simple, Yet Powerful Tool for Operational C2 Systems Cognitive Domain Issues C2 Experimentation C2 Modeling
Status of Active Debris Removal (ADR) developments at the Swiss Space Center
 developments at the Swiss Space Center") Status of Active Debris Removal (ADR) developments at the Swiss Space Center Muriel Richard, Benoit Chamot, Volker Gass, Claude Nicollier muriel.richard@epfl.ch IAF SYMPOSIUM 2013 11 February 2013 Vienna
Status of Active Debris Removal (ADR) developments at the Swiss Space Center Muriel Richard, Benoit Chamot, Volker Gass, Claude Nicollier muriel.richard@epfl.ch IAF SYMPOSIUM 2013 11 February 2013 Vienna