Interaction in Urban Traffic Insights into an Observation of Pedestrian-Vehicle Encounters
|
|
|
- Kathlyn Bridges
- 5 years ago
- Views:
Transcription


1 Interaction in Urban Traffic Insights into an Observation of Pedestrian-Vehicle Encounters André Dietrich, Chair of Ergonomics, TUM CARTRE and SCOUT are funded by Monday, May the European 14, 2018 Union Horizon 2020 Work Programme

2 Observation of Pedestrian-Vehicle Encounters / 2
3 Key Objectives Observe human-human interactions in current complex urban environments / 3
4 Key Objectives Observe human-human interactions in current complex urban environments Model interaction using different approaches Interaction vocabulary: How do TPs communicate and anticipate intent Interaction sequences: What is the general interaction process in specific use cases, scenarios and scenes? Quantitative models: How can interactions be mathematically formulated to allow model-in-theloop simulations? / 4
5 Key Objectives Observe human-human interactions in current complex urban environments Model interaction using different approaches Interaction vocabulary: How do TPs communicate and anticipate intent Interaction sequences: What is the general interaction process in specific use cases, scenarios and scenes? Quantitative models: How can interactions be mathematically formulated to allow model in the loop simulations? Develop real-time situation and intention analysis algorithms based on the interaction models / 5
6 Key Objectives Observe human-human interactions in current complex urban environments Model interaction using different approaches Interaction vocabulary: How do TPs communicate and anticipate intent Interaction sequences: What is the general interaction process in specific use cases, scenarios and scenes? Quantitative models: How can interactions be mathematically formulated to allow model in the loop simulations? Develop real-time situation and intention analysis algorithms based on the interaction models Observe, Model, Predict / 6

7 Methodology 3 Countries 4 Use Cases / 7

8 Methodology Naturalistic observation of urban traffic Video Observation Protocols Questionnaires LiDAR / 8

9 Methodology Video: Birds eye view perspective of locations chosen to represent the use-cases Algorithmic analysis of the videos to derive positions and velocities of various traffic participants / 9


10 Methodology LiDAR: Stationary LiDAR giving additional information on traffic participants and increasing tracking range Collected data is synchronized in time enabling a holistic overview of observed interactions WebCam GNSS Receiver Ibeo Lux Laser Scanner SSD Drive Laptop Power Bank Raspberry Pi WiFi Access Point / 10


11 Methodology Manual Observation: Observers protocolling individual observed interactions from the ground HTML based app for tablets observing pedestrian and driver behaviour, including head rotation, eye contact, etc. Questionnaires / 11

12 Preliminary Results Manual Observation Observers were advised only to record interaction-demanding situations In these situations both traffic participants would have a conflict, if neither of them changed their behaviour If there was some sort of interaction between pedestrian and driver, observed pedestrians were asked to fill out a questionnaire. / 12


13 Preliminary Results Manual Observation Over 100 Protocols per use case and country Also: combined 100+ hours of videos, 20+ hours of LiDAR Data and 150+ people interviewed / 13
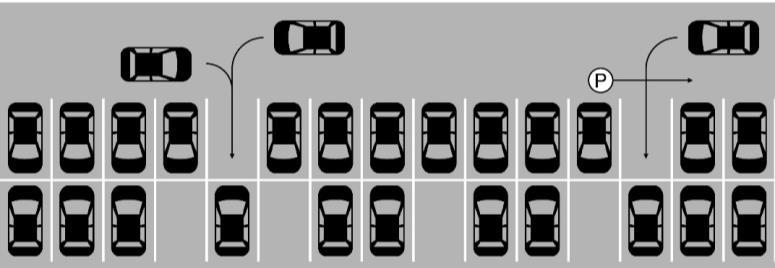
14 Preliminary Results Manual Observation Intersection pedestrian goes first: / 14
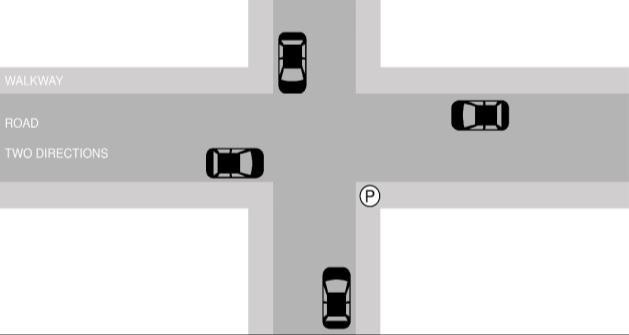
15 Preliminary Results Manual Observation Intersection vehicle goes first: / 15
16 Overall Findings Occurrence and necessity of interactions highly depends on the situation and a variety of other influences, such as traffic density, time of day and specific traffic conditions Explicit communication (e.g. gesturing, flashing lights etc.) happens rarely - most potential interaction-demanding situations are resolved before they actually arise, mostly by adjusting kinematic motion Cooperation, communication and thus interaction between human road users takes place at low speeds, usually below 20 km/h At higher speeds conflict avoidance is predominant pedestrians use large enough intervehicle gaps to cross without expecting the second vehicle to adapt Self reports reality: About 50% of pedestrians reported to use some sort of visual information from the driver even when the driver could not have been physically perceived / 16

17 Overall Findings Human road users seem to avoid active communication with others by adapting their movement behavior early Only in ambiguous situations (e.g. deadlocks) communication is used to let the other traffic participant go first, mostly using gestures In the rare case that pedestrians waved a driver through, the Thank You hand gesture always followed by the driver. / 17
18 (First) Conclusions Automated Vehicles do not need to communicate much using external Human Machine Interfaces if the idea is to replace a human driver only in ambiguous situations explicit communication is really necessary BUT Automated Vehicles could enhance the vehicle by communicating early in addition to adapting their movement possibly increasing Acceptance, Safety and Traffic Flow / 18

19 Thank you! CARTRE and SCOUT are funded by Monday, May the European 14, 2018 Union Horizon 2020 Work Programme
Exploring Pedestrian Bluetooth and WiFi Detection at Public Transportation Terminals
 Exploring Pedestrian Bluetooth and WiFi Detection at Public Transportation Terminals Neveen Shlayan 1, Abdullah Kurkcu 2, and Kaan Ozbay 3 November 1, 2016 1 Assistant Professor, Department of Electrical
Exploring Pedestrian Bluetooth and WiFi Detection at Public Transportation Terminals Neveen Shlayan 1, Abdullah Kurkcu 2, and Kaan Ozbay 3 November 1, 2016 1 Assistant Professor, Department of Electrical
Perception platform and fusion modules results. Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event
 Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
ENHANCED HUMAN-AGENT INTERACTION: AUGMENTING INTERACTION MODELS WITH EMBODIED AGENTS BY SERAFIN BENTO. MASTER OF SCIENCE in INFORMATION SYSTEMS
 BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
AV Exterior Communications ISO TC 22/SC 39
 AV Exterior Communications ISO TC 22/SC 39 GTB meeting Lisbon, Portugal November 28, 2018 John Shutko, chair ISO TC 22/SC 39 Outline Introduction to ISO Description of ISO TC 22/SC 39 AV Exterior Communication
AV Exterior Communications ISO TC 22/SC 39 GTB meeting Lisbon, Portugal November 28, 2018 John Shutko, chair ISO TC 22/SC 39 Outline Introduction to ISO Description of ISO TC 22/SC 39 AV Exterior Communication
MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE
 MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE First Annual 2018 National Mobility Summit of US DOT University Transportation Centers (UTC) April 12, 2018 Washington, DC Research Areas Cooperative
MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE First Annual 2018 National Mobility Summit of US DOT University Transportation Centers (UTC) April 12, 2018 Washington, DC Research Areas Cooperative
Video Injection Methods in a Real-world Vehicle for Increasing Test Efficiency
 DEVELOPMENT SIMUL ATION AND TESTING Video Injection Methods in a Real-world Vehicle for Increasing Test Efficiency IPG Automotive AUTHORS For the testing of camera-based driver assistance systems under
DEVELOPMENT SIMUL ATION AND TESTING Video Injection Methods in a Real-world Vehicle for Increasing Test Efficiency IPG Automotive AUTHORS For the testing of camera-based driver assistance systems under
Analysis and Investigation Method for All Traffic Scenarios (AIMATS)
") Analysis and Investigation Method for All Traffic Scenarios (AIMATS) Dr. Christian Erbsmehl*, Dr. Nils Lubbe**, Niels Ferson**, Hitoshi Yuasa**, Dr. Tom Landgraf*, Martin Urban* *Fraunhofer Institute for
Analysis and Investigation Method for All Traffic Scenarios (AIMATS) Dr. Christian Erbsmehl*, Dr. Nils Lubbe**, Niels Ferson**, Hitoshi Yuasa**, Dr. Tom Landgraf*, Martin Urban* *Fraunhofer Institute for
Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System
 Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System By Dr. Kai Franke, Development Online Driver Assistance Systems, Volkswagen AG 10 Engineering Reality Magazine A
Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System By Dr. Kai Franke, Development Online Driver Assistance Systems, Volkswagen AG 10 Engineering Reality Magazine A
IV Work Area: CONNECTED CARS: ROAD TO VEHICLE COMMUNICATION THROUGH VISIBLE LIGHT. An illustration of traffic control system of tomorrow
 IV Work Area: CONNECTED CARS: ROAD TO VEHICLE COMMUNICATION THROUGH VISIBLE LIGHT An illustration of traffic control system of tomorrow Motivation and Objectives IV, VV, VI optoelectronic WDM cooperative
IV Work Area: CONNECTED CARS: ROAD TO VEHICLE COMMUNICATION THROUGH VISIBLE LIGHT An illustration of traffic control system of tomorrow Motivation and Objectives IV, VV, VI optoelectronic WDM cooperative
Connected Car Networking
 Connected Car Networking Teng Yang, Francis Wolff and Christos Papachristou Electrical Engineering and Computer Science Case Western Reserve University Cleveland, Ohio Outline Motivation Connected Car
Connected Car Networking Teng Yang, Francis Wolff and Christos Papachristou Electrical Engineering and Computer Science Case Western Reserve University Cleveland, Ohio Outline Motivation Connected Car
Invited talk IET-Renault Workshop Autonomous Vehicles: From theory to full scale applications Novotel Paris Les Halles, June 18 th 2015
 Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results
 SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
Frequently Asked Questions
 The Synchro Studio support site is available for users to submit questions regarding any of our software products. Our goal is to respond to questions (Monday - Friday) within a 24-hour period. Most questions
The Synchro Studio support site is available for users to submit questions regarding any of our software products. Our goal is to respond to questions (Monday - Friday) within a 24-hour period. Most questions
Assessments of Grade Crossing Warning and Signalization Devices Driving Simulator Study
 Assessments of Grade Crossing Warning and Signalization Devices Driving Simulator Study Petr Bouchner, Stanislav Novotný, Roman Piekník, Ondřej Sýkora Abstract Behavior of road users on railway crossings
Assessments of Grade Crossing Warning and Signalization Devices Driving Simulator Study Petr Bouchner, Stanislav Novotný, Roman Piekník, Ondřej Sýkora Abstract Behavior of road users on railway crossings
Séminaire Voiture Autonome: Technologies, Enjeux et Applications February , Paris (France) Asprom UIMM Cap Tronic
 Asprom UIMM Cap Tronic") Embedded Perception & Risk Assessment for next Cars Generation Christian LAUGIER, Research Director at Inria Chroma Team & IRT Nanolec Christian.laugier@inria.fr Contributions from Mathias Perrollaz, Christopher
Embedded Perception & Risk Assessment for next Cars Generation Christian LAUGIER, Research Director at Inria Chroma Team & IRT Nanolec Christian.laugier@inria.fr Contributions from Mathias Perrollaz, Christopher
Intelligent Technology for More Advanced Autonomous Driving
 FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
Using FMI/ SSP for Development of Autonomous Driving
 Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
Robust Positioning for Urban Traffic
 Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Devid Will, Adrian Zlocki
 Devid Will, Adrian Zlocki fka Forschungsgesellschaft Kraftfahrwesen mbh TS91 Sensors for Automated Vehicles State of the Art Analysis for Connected and Automated Driving within the SCOUT Project Overview
Devid Will, Adrian Zlocki fka Forschungsgesellschaft Kraftfahrwesen mbh TS91 Sensors for Automated Vehicles State of the Art Analysis for Connected and Automated Driving within the SCOUT Project Overview
INTERACTIVE SKETCHING OF THE URBAN-ARCHITECTURAL SPATIAL DRAFT Peter Kardoš Slovak University of Technology in Bratislava
 INTERACTIVE SKETCHING OF THE URBAN-ARCHITECTURAL SPATIAL DRAFT Peter Kardoš Slovak University of Technology in Bratislava Abstract The recent innovative information technologies and the new possibilities
INTERACTIVE SKETCHING OF THE URBAN-ARCHITECTURAL SPATIAL DRAFT Peter Kardoš Slovak University of Technology in Bratislava Abstract The recent innovative information technologies and the new possibilities
BATTELLE AND THE SMART CITY. Turning vision into reality for tomorrow s urban environments.
 BATTELLE AND THE SMART CITY Turning vision into reality for tomorrow s urban environments. THE CITY OF THE HOSPITAL SCHOOL What makes a Smart City? It s connected. Responsive. Intelligent. It s an environment
BATTELLE AND THE SMART CITY Turning vision into reality for tomorrow s urban environments. THE CITY OF THE HOSPITAL SCHOOL What makes a Smart City? It s connected. Responsive. Intelligent. It s an environment
GamECAR JULY ULY Meetings. 5 Toward the future. 5 Consortium. E Stay updated
 NEWSLETTER 1 ULY 2017 JULY The project engine has started and there is a long way to go, but we aim at consuming as less gas as possible! It will be a game, but a serious one. Playing it for real, while
NEWSLETTER 1 ULY 2017 JULY The project engine has started and there is a long way to go, but we aim at consuming as less gas as possible! It will be a game, but a serious one. Playing it for real, while
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators. Roberto De Vecchi VI-grade Enrico Busto - AddFor
 ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
Steering a Driving Simulator Using the Queueing Network-Model Human Processor (QN-MHP)
") University of Iowa Iowa Research Online Driving Assessment Conference 2003 Driving Assessment Conference Jul 22nd, 12:00 AM Steering a Driving Simulator Using the Queueing Network-Model Human Processor
University of Iowa Iowa Research Online Driving Assessment Conference 2003 Driving Assessment Conference Jul 22nd, 12:00 AM Steering a Driving Simulator Using the Queueing Network-Model Human Processor
Naturalistic Flying Study as a Method of Collecting Pilot Communication Behavior Data
 IEEE Cognitive Communications for Aerospace Applications Workshop 2017 Naturalistic Flying Study as a Method of Collecting Pilot Communication Behavior Data Chang-Geun Oh, Ph.D Kent State University Why
IEEE Cognitive Communications for Aerospace Applications Workshop 2017 Naturalistic Flying Study as a Method of Collecting Pilot Communication Behavior Data Chang-Geun Oh, Ph.D Kent State University Why
PROPART PROJECT PRESENTATION
 1 PROPART PROJECT PRESENTATION Stefan Nord RISE Measurement Science and Technology RISE/Safety and Transport Presentation Outline Project Data Consortium Objectives Partner contributions 3 Project data
1 PROPART PROJECT PRESENTATION Stefan Nord RISE Measurement Science and Technology RISE/Safety and Transport Presentation Outline Project Data Consortium Objectives Partner contributions 3 Project data
Transportation Informatics Group, ALPEN-ADRIA University of Klagenfurt. Transportation Informatics Group University of Klagenfurt 3/10/2009 1
 Machine Vision Transportation Informatics Group University of Klagenfurt Alireza Fasih, 2009 3/10/2009 1 Address: L4.2.02, Lakeside Park, Haus B04, Ebene 2, Klagenfurt-Austria Index Driver Fatigue Detection
Machine Vision Transportation Informatics Group University of Klagenfurt Alireza Fasih, 2009 3/10/2009 1 Address: L4.2.02, Lakeside Park, Haus B04, Ebene 2, Klagenfurt-Austria Index Driver Fatigue Detection
People and mobility in Turku Futures of mobility as a subsystem of a complex city
 People and mobility in Turku Futures of mobility as a subsystem of a complex city Nicolas A. Balcom Raleigh, Anna Kirveennummi, Ellinoora Leino-Richert, Hoa Nguyen, Sari Puustinen, and Markku Wilenius.
People and mobility in Turku Futures of mobility as a subsystem of a complex city Nicolas A. Balcom Raleigh, Anna Kirveennummi, Ellinoora Leino-Richert, Hoa Nguyen, Sari Puustinen, and Markku Wilenius.
Fusion in EU projects and the Perception Approach. Dr. Angelos Amditis interactive Summer School 4-6 July, 2012
 Fusion in EU projects and the Perception Approach Dr. Angelos Amditis interactive Summer School 4-6 July, 2012 Content Introduction Data fusion in european research projects EUCLIDE PReVENT-PF2 SAFESPOT
Fusion in EU projects and the Perception Approach Dr. Angelos Amditis interactive Summer School 4-6 July, 2012 Content Introduction Data fusion in european research projects EUCLIDE PReVENT-PF2 SAFESPOT
Presented by: Hesham Rakha, Ph.D., P. Eng.
 Developing Intersection Cooperative Adaptive Cruise Control System Applications Presented by: Hesham Rakha, Ph.D., P. Eng. Director, Center for Sustainable Mobility at Professor, Charles E. Via, Jr. Dept.
Developing Intersection Cooperative Adaptive Cruise Control System Applications Presented by: Hesham Rakha, Ph.D., P. Eng. Director, Center for Sustainable Mobility at Professor, Charles E. Via, Jr. Dept.
Embedded Bayesian Perception & V2X Communications for Autonomous Driving
 Embedded Bayesian Perception & V2X Communications for Autonomous Driving Dr. HDR Christian LAUGIER First Class Research Director at Inria, Chroma team & IRT nanoelec Scientific Advisor for Probayes SA
Embedded Bayesian Perception & V2X Communications for Autonomous Driving Dr. HDR Christian LAUGIER First Class Research Director at Inria, Chroma team & IRT nanoelec Scientific Advisor for Probayes SA
PERFORMANCE ANALYSIS OF ROUTING PROTOCOLS FOR P INCLUDING PROPAGATION MODELS
 PERFORMANCE ANALYSIS OF ROUTING PROTOCOLS FOR 802.11P INCLUDING PROPAGATION MODELS Mit Parmar 1, Kinnar Vaghela 2 1 Student M.E. Communication Systems, Electronics & Communication Department, L.D. College
PERFORMANCE ANALYSIS OF ROUTING PROTOCOLS FOR 802.11P INCLUDING PROPAGATION MODELS Mit Parmar 1, Kinnar Vaghela 2 1 Student M.E. Communication Systems, Electronics & Communication Department, L.D. College
Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection
 Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection Clark Letter*, Lily Elefteriadou, Mahmoud Pourmehrab, Aschkan Omidvar Civil
Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection Clark Letter*, Lily Elefteriadou, Mahmoud Pourmehrab, Aschkan Omidvar Civil
EVALUATION OF COMPLEX AT-GRADE RAIL CROSSING DESIGNS USING A DRIVER SIMULATION
 EVALUATION OF COMPLEX AT-GRADE RAIL CROSSING DESIGNS USING A DRIVER SIMULATION Authors: John Robinson, Ph.D., P. Eng. Delphi-MRC Alison Smiley, Ph.D., CCPE Human Factors North Jeff Caird, Ph.D. University
EVALUATION OF COMPLEX AT-GRADE RAIL CROSSING DESIGNS USING A DRIVER SIMULATION Authors: John Robinson, Ph.D., P. Eng. Delphi-MRC Alison Smiley, Ph.D., CCPE Human Factors North Jeff Caird, Ph.D. University
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Topic 1. Road safety rules. Projects: 1. Robo drives safely - page Robo is a traffic light - - page 6-10 Robo is a smart traffic light
 Topic 1. Road safety rules. Road safety is an important topic for young students because everyone uses roads, and the dangers associated with the roads impact everyone. Robo Wunderkind robotics kits help
Topic 1. Road safety rules. Road safety is an important topic for young students because everyone uses roads, and the dangers associated with the roads impact everyone. Robo Wunderkind robotics kits help
Big data in Thessaloniki
 Big data in Thessaloniki Josep Maria Salanova Grau Center for Research and Technology Hellas Hellenic Institute of Transport Email: jose@certh.gr - emit@certh.gr Web: www.hit.certh.gr Big data in Thessaloniki
Big data in Thessaloniki Josep Maria Salanova Grau Center for Research and Technology Hellas Hellenic Institute of Transport Email: jose@certh.gr - emit@certh.gr Web: www.hit.certh.gr Big data in Thessaloniki
Advancing Simulation as a Safety Research Tool
 Institute for Transport Studies FACULTY OF ENVIRONMENT Advancing Simulation as a Safety Research Tool Richard Romano My Early Past (1990-1995) The Iowa Driving Simulator Virtual Prototypes Human Factors
Institute for Transport Studies FACULTY OF ENVIRONMENT Advancing Simulation as a Safety Research Tool Richard Romano My Early Past (1990-1995) The Iowa Driving Simulator Virtual Prototypes Human Factors
Automotive Needs and Expectations towards Next Generation Driving Simulation
 Automotive Needs and Expectations towards Next Generation Driving Simulation Dr. Hans-Peter Schöner - Insight fromoutside -Consulting - Senior Automotive Expert, Driving Simulation Association September
Automotive Needs and Expectations towards Next Generation Driving Simulation Dr. Hans-Peter Schöner - Insight fromoutside -Consulting - Senior Automotive Expert, Driving Simulation Association September
interactive IP: Perception platform and modules
 interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
Cognitive Systems Engineering
 Chapter 5 Cognitive Systems Engineering Gordon Baxter, University of St Andrews Summary Cognitive systems engineering is an approach to socio-technical systems design that is primarily concerned with the
Chapter 5 Cognitive Systems Engineering Gordon Baxter, University of St Andrews Summary Cognitive systems engineering is an approach to socio-technical systems design that is primarily concerned with the
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts
 Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Machine Learning for Intelligent Transportation Systems
 Machine Learning for Intelligent Transportation Systems Patrick Emami (CISE), Anand Rangarajan (CISE), Sanjay Ranka (CISE), Lily Elefteriadou (CE) MALT Lab, UFTI September 6, 2018 ITS - A Broad Perspective
Machine Learning for Intelligent Transportation Systems Patrick Emami (CISE), Anand Rangarajan (CISE), Sanjay Ranka (CISE), Lily Elefteriadou (CE) MALT Lab, UFTI September 6, 2018 ITS - A Broad Perspective
Partners. Mobility Schemes Ensuring ACCESSibility of Public Transport for ALL Users. all.eu
 http://www.access-to-all.eu Issue: Nov. 2010 Partners CERTH/HIT Center of Research and Technology Hellas/Hellenic Institute of Transport Scientific Coordinator Greece ERT Europe Research Transport Management
http://www.access-to-all.eu Issue: Nov. 2010 Partners CERTH/HIT Center of Research and Technology Hellas/Hellenic Institute of Transport Scientific Coordinator Greece ERT Europe Research Transport Management
Applied Robotics for Installations and Base Operations (ARIBO)
") Applied Robotics for Installations and Base Operations (ARIBO) Overview January, 2016 Edward Straub, DM U.S. Army TARDEC, Ground Vehicle Robotics edward.r.straub2.civ@mail.mil ARIBO Overview 1 ARIBO Strategic
Applied Robotics for Installations and Base Operations (ARIBO) Overview January, 2016 Edward Straub, DM U.S. Army TARDEC, Ground Vehicle Robotics edward.r.straub2.civ@mail.mil ARIBO Overview 1 ARIBO Strategic
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
VSI Labs The Build Up of Automated Driving
 VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
Sensor Fusion for Navigation in Degraded Environements
 Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
Agenda. Morning. TS2 Cabinet Components and Operation. Traffic Signal Ring Structure. Afternoon. Basic Preemption/Priority
 Agenda Morning Traffic Terminology TS2 Cabinet Components and Operation Traffic Signal Phasing Traffic Signal Ring Structure Understanding a Signal Plan Controller Programming Afternoon Basic Coordination
Agenda Morning Traffic Terminology TS2 Cabinet Components and Operation Traffic Signal Phasing Traffic Signal Ring Structure Understanding a Signal Plan Controller Programming Afternoon Basic Coordination
What will the robot do during the final demonstration?
 SPENCER Questions & Answers What is project SPENCER about? SPENCER is a European Union-funded research project that advances technologies for intelligent robots that operate in human environments. Such
SPENCER Questions & Answers What is project SPENCER about? SPENCER is a European Union-funded research project that advances technologies for intelligent robots that operate in human environments. Such
URBAN traffic congestion is becoming an unmanageable
 IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, VOL. 13, NO. 1, MARCH 2012 91 Platooning With IVC-Enabled Autonomous Vehicles: Strategies to Mitigate Communication Delays, Improve Safety and Traffic
IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, VOL. 13, NO. 1, MARCH 2012 91 Platooning With IVC-Enabled Autonomous Vehicles: Strategies to Mitigate Communication Delays, Improve Safety and Traffic
WB2306 The Human Controller
 Simulation WB2306 The Human Controller Class 1. General Introduction Adapt the device to the human, not the human to the device! Teacher: David ABBINK Assistant professor at Delft Haptics Lab (www.delfthapticslab.nl)
Simulation WB2306 The Human Controller Class 1. General Introduction Adapt the device to the human, not the human to the device! Teacher: David ABBINK Assistant professor at Delft Haptics Lab (www.delfthapticslab.nl)
Combining ROS and AI for fail-operational automated driving
 Combining ROS and AI for fail-operational automated driving Prof. Dr. Daniel Watzenig Virtual Vehicle Research Center, Graz, Austria and Institute of Automation and Control at Graz University of Technology
Combining ROS and AI for fail-operational automated driving Prof. Dr. Daniel Watzenig Virtual Vehicle Research Center, Graz, Austria and Institute of Automation and Control at Graz University of Technology
Fire Service College - immersive 3D emergency training
 Fire Service College - immersive 3D emergency training The Fire Service College are an award-winning leader in fire and emergency response training and operate one of the world s largest fire and rescue
Fire Service College - immersive 3D emergency training The Fire Service College are an award-winning leader in fire and emergency response training and operate one of the world s largest fire and rescue
Introduction to Systems Engineering
 p. 1/2 ENES 489P Hands-On Systems Engineering Projects Introduction to Systems Engineering Mark Austin E-mail: austin@isr.umd.edu Institute for Systems Research, University of Maryland, College Park Career
p. 1/2 ENES 489P Hands-On Systems Engineering Projects Introduction to Systems Engineering Mark Austin E-mail: austin@isr.umd.edu Institute for Systems Research, University of Maryland, College Park Career
INTRODUCTION to ROBOTICS
 1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
Cellular-based Vehicle to Pedestrian (V2P) Adaptive Communication for Collision Avoidance
 Adaptive Communication for Collision Avoidance") Cellular-based Vehicle to Pedestrian (V2P) Adaptive Communication for Collision Avoidance Mehrdad Bagheri, Matti Siekkinen, Jukka K. Nurminen Aalto University - Department of Computer Science and Engineering
Cellular-based Vehicle to Pedestrian (V2P) Adaptive Communication for Collision Avoidance Mehrdad Bagheri, Matti Siekkinen, Jukka K. Nurminen Aalto University - Department of Computer Science and Engineering
Newsletter No. 2 (July 2017)
") Enhancing intelligent urban road transport network and cooperative systems for highly automated vehicles Newsletter No. 2 (July 2017) Introduction MAVEN (Managing Automated Vehicles Enhances Network) was
Enhancing intelligent urban road transport network and cooperative systems for highly automated vehicles Newsletter No. 2 (July 2017) Introduction MAVEN (Managing Automated Vehicles Enhances Network) was
Trust in Automated Vehicles
 Trust in Automated Vehicles Fredrick Ekman and Mikael Johansson ekmanfr@chalmers.se, johamik@chalmers.se Design & Human Factors, Chalmers Adoption and use of technical systems users needs and requirements
Trust in Automated Vehicles Fredrick Ekman and Mikael Johansson ekmanfr@chalmers.se, johamik@chalmers.se Design & Human Factors, Chalmers Adoption and use of technical systems users needs and requirements
Tone Martinsen Dynamic Positioning
 Characteristics of Critical Incidents in DP Tone Martinsen (skaretone@hotmail.com) Dynamic Positioning What is it? DP is an automated system for vessel station keeping. A computer control system automatically
Characteristics of Critical Incidents in DP Tone Martinsen (skaretone@hotmail.com) Dynamic Positioning What is it? DP is an automated system for vessel station keeping. A computer control system automatically
Simulationbased Development of ADAS and Automated Driving with the Help of Machine Learning
 Simulationbased Development of ADAS and Automated Driving with the Help of Machine Learning Dr. Andreas Kuhn A N D A T A München, 2017-06-27 2 Fields of Competence Artificial Intelligence Data Mining Big
Simulationbased Development of ADAS and Automated Driving with the Help of Machine Learning Dr. Andreas Kuhn A N D A T A München, 2017-06-27 2 Fields of Competence Artificial Intelligence Data Mining Big
Humans and Automated Driving Systems
 Innovation of Automated Driving for Universal Services (SIP-adus) Humans and Automated Driving Systems November 18, 2014 Kiyozumi Unoura Chief Engineer Honda R&D Co., Ltd. Automobile R&D Center Workshop
Innovation of Automated Driving for Universal Services (SIP-adus) Humans and Automated Driving Systems November 18, 2014 Kiyozumi Unoura Chief Engineer Honda R&D Co., Ltd. Automobile R&D Center Workshop
Comparison of Simulation-Based Dynamic Traffic Assignment Approaches for Planning and Operations Management
 Comparison of Simulation-Based Dynamic Traffic Assignment Approaches for Planning and Operations Management Ramachandran Balakrishna Daniel Morgan Qi Yang Howard Slavin Caliper Corporation 4 th TRB Conference
Comparison of Simulation-Based Dynamic Traffic Assignment Approaches for Planning and Operations Management Ramachandran Balakrishna Daniel Morgan Qi Yang Howard Slavin Caliper Corporation 4 th TRB Conference
DLR Simulation Environment m 3
 DLR Simulation Environment m 3 Matthias Röckl, Thomas Strang Slide 1 > First C2C-CC/COMeSafety Simulation Workshop > Matthias Röckl Motivation Contradicting simulation results Source: Cavin et.al.: On
DLR Simulation Environment m 3 Matthias Röckl, Thomas Strang Slide 1 > First C2C-CC/COMeSafety Simulation Workshop > Matthias Röckl Motivation Contradicting simulation results Source: Cavin et.al.: On
Intelligent Driving Agents
 Intelligent Driving Agents The agent approach to tactical driving in autonomous vehicles and traffic simulation Presentation Master s thesis Patrick Ehlert January 29 th, 2001 Imagine. Sensors Actuators
Intelligent Driving Agents The agent approach to tactical driving in autonomous vehicles and traffic simulation Presentation Master s thesis Patrick Ehlert January 29 th, 2001 Imagine. Sensors Actuators
Understanding User s Experiences: Evaluation of Digital Libraries. Ann Blandford University College London
 Understanding User s Experiences: Evaluation of Digital Libraries Ann Blandford University College London Overview Background Some desiderata for DLs Some approaches to evaluation Quantitative Qualitative
Understanding User s Experiences: Evaluation of Digital Libraries Ann Blandford University College London Overview Background Some desiderata for DLs Some approaches to evaluation Quantitative Qualitative
Loughborough University Institutional Repository. This item was submitted to Loughborough University's Institutional Repository by the/an author.
 Loughborough University Institutional Repository Digital and video analysis of eye-glance movements during naturalistic driving from the ADSEAT and TeleFOT field operational trials - results and challenges
Loughborough University Institutional Repository Digital and video analysis of eye-glance movements during naturalistic driving from the ADSEAT and TeleFOT field operational trials - results and challenges
TACOT Project. Trusted multi Application receiver for Trucks. Bordeaux, 4 June 2014
 TACOT Project Trusted multi Application receiver for Trucks Bordeaux, 4 June 2014 Agenda TACOT Context & Solution Technical developments Test & Validation results Conclusions GNSS ease our lives GNSS is
TACOT Project Trusted multi Application receiver for Trucks Bordeaux, 4 June 2014 Agenda TACOT Context & Solution Technical developments Test & Validation results Conclusions GNSS ease our lives GNSS is
Z+F IMAGER 5016 / Laser Scanner
 Z+F IMAGER 5016 / Laser Scanner Reaching new levels The new Z+F IMAGER 5016 combines compact and lightweight design with state-of-the-art laser scanning technology - allowing the user to reach new levels.
Z+F IMAGER 5016 / Laser Scanner Reaching new levels The new Z+F IMAGER 5016 combines compact and lightweight design with state-of-the-art laser scanning technology - allowing the user to reach new levels.
AIRWORTHINESS & SAFETY: ARE WE MISSING A LINK?
 AIRWORTHINESS & SAFETY: ARE WE MISSING A LINK? Dr. Nektarios Karanikas, CEng, PMP, GradIOSH, MRAeS, MIET, Lt. Col. (ret.) Associate Professor of Safety & Human Factors Aviation Academy Cranfield University
AIRWORTHINESS & SAFETY: ARE WE MISSING A LINK? Dr. Nektarios Karanikas, CEng, PMP, GradIOSH, MRAeS, MIET, Lt. Col. (ret.) Associate Professor of Safety & Human Factors Aviation Academy Cranfield University
Toward an Integrated Ecological Plan View Display for Air Traffic Controllers
 Wright State University CORE Scholar International Symposium on Aviation Psychology - 2015 International Symposium on Aviation Psychology 2015 Toward an Integrated Ecological Plan View Display for Air
Wright State University CORE Scholar International Symposium on Aviation Psychology - 2015 International Symposium on Aviation Psychology 2015 Toward an Integrated Ecological Plan View Display for Air
Into Moving Forward to Automated Driving. In this issue: ITS World Congress in Montreal. CARTRE and ERTRAC Joint Workshop
 THE NEWSLETTER OF THE CONNECTED AUTOMATED DRIVING IN EUROPE INITIATIVE ISSUE N 4 FEBRUARY 2018 Into 2018 Moving Forward to Automated Driving In this issue: ITS World Congress in Montreal CARTRE and ERTRAC
THE NEWSLETTER OF THE CONNECTED AUTOMATED DRIVING IN EUROPE INITIATIVE ISSUE N 4 FEBRUARY 2018 Into 2018 Moving Forward to Automated Driving In this issue: ITS World Congress in Montreal CARTRE and ERTRAC
Traffic Control for a Swarm of Robots: Avoiding Target Congestion
 Traffic Control for a Swarm of Robots: Avoiding Target Congestion Leandro Soriano Marcolino and Luiz Chaimowicz Abstract One of the main problems in the navigation of robotic swarms is when several robots
Traffic Control for a Swarm of Robots: Avoiding Target Congestion Leandro Soriano Marcolino and Luiz Chaimowicz Abstract One of the main problems in the navigation of robotic swarms is when several robots
Robots in Human Environments
 Robots in Human Environments The Intelligent Vehicle Context Christian LAUGIER Research Director at INRIA Deputy Director of the LIG Laboratory (Grenoble France) Invited talk AMS 09, Karlsruhe, December
Robots in Human Environments The Intelligent Vehicle Context Christian LAUGIER Research Director at INRIA Deputy Director of the LIG Laboratory (Grenoble France) Invited talk AMS 09, Karlsruhe, December
Tsuyoshi Sato PIONEER CORPORATION July 6, 2017
 Technology R&D for for Highly Highly Automated Automated Driving Driving Tsuyoshi Sato PIONEER CORPORATION July 6, 2017 Agenda Introduction Overview Architecture R&D for Highly Automated Driving Hardware
Technology R&D for for Highly Highly Automated Automated Driving Driving Tsuyoshi Sato PIONEER CORPORATION July 6, 2017 Agenda Introduction Overview Architecture R&D for Highly Automated Driving Hardware
Game Theory: Normal Form Games
 Game Theory: Normal Form Games CPSC 322 Lecture 34 April 3, 2006 Reading: excerpt from Multiagent Systems, chapter 3. Game Theory: Normal Form Games CPSC 322 Lecture 34, Slide 1 Lecture Overview Recap
Game Theory: Normal Form Games CPSC 322 Lecture 34 April 3, 2006 Reading: excerpt from Multiagent Systems, chapter 3. Game Theory: Normal Form Games CPSC 322 Lecture 34, Slide 1 Lecture Overview Recap
Digitisation A Quantitative and Qualitative Market Research Elicitation
 www.pwc.de Digitisation A Quantitative and Qualitative Market Research Elicitation Examining German digitisation needs, fears and expectations 1. Introduction Digitisation a topic that has been prominent
www.pwc.de Digitisation A Quantitative and Qualitative Market Research Elicitation Examining German digitisation needs, fears and expectations 1. Introduction Digitisation a topic that has been prominent
Microscopic traffic simulation with reactive driving agents
 2001 IEEE Intelligent Transportation Systems Conference Proceedings - Oakland (CA) USA = August 25-29, 2001 Microscopic traffic simulation with reactive driving agents Patrick A.M.Ehlert and Leon J.M.Rothkrantz,
2001 IEEE Intelligent Transportation Systems Conference Proceedings - Oakland (CA) USA = August 25-29, 2001 Microscopic traffic simulation with reactive driving agents Patrick A.M.Ehlert and Leon J.M.Rothkrantz,
Lane Segmentation for Self-Driving Cars using Image Processing
 Lane Segmentation for Self-Driving Cars using Image Processing Aman Tanwar 1, Jayakrishna 2, Mohit Kumar Yadav 3, Niraj Singh 4, Yogita Hambir 5 1,2,3,4,5Department of Computer Engineering, Army Institute
Lane Segmentation for Self-Driving Cars using Image Processing Aman Tanwar 1, Jayakrishna 2, Mohit Kumar Yadav 3, Niraj Singh 4, Yogita Hambir 5 1,2,3,4,5Department of Computer Engineering, Army Institute
Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation
 DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Visualization of Vehicular Traffic in Augmented Reality for Improved Planning and Analysis of Road Construction Projects
 NSF GRANT # 0448762 NSF PROGRAM NAME: CMMI/CIS Visualization of Vehicular Traffic in Augmented Reality for Improved Planning and Analysis of Road Construction Projects Amir H. Behzadan City University
NSF GRANT # 0448762 NSF PROGRAM NAME: CMMI/CIS Visualization of Vehicular Traffic in Augmented Reality for Improved Planning and Analysis of Road Construction Projects Amir H. Behzadan City University
NovAtel s. Performance Analysis October Abstract. SPAN on OEM6. SPAN on OEM6. Enhancements
 NovAtel s SPAN on OEM6 Performance Analysis October 2012 Abstract SPAN, NovAtel s GNSS/INS solution, is now available on the OEM6 receiver platform. In addition to rapid GNSS signal reacquisition performance,
NovAtel s SPAN on OEM6 Performance Analysis October 2012 Abstract SPAN, NovAtel s GNSS/INS solution, is now available on the OEM6 receiver platform. In addition to rapid GNSS signal reacquisition performance,
Contextual Pedestrian-to-Vehicle DSRC Communication
 Contextual Pedestrian-to-Vehicle DSRC Communication Ali Rostami, Bin Cheng, Hongsheng Lu, John B. Kenney, and Marco Gruteser WINLAB, Rutgers University, USA Toyota InfoTechnology Center, USA December 2016
Contextual Pedestrian-to-Vehicle DSRC Communication Ali Rostami, Bin Cheng, Hongsheng Lu, John B. Kenney, and Marco Gruteser WINLAB, Rutgers University, USA Toyota InfoTechnology Center, USA December 2016
Swarm Robotics. Communication and Cooperation over the Internet. Will Ferenc, Hannah Kastein, Lauren Lieu, Ryan Wilson Mentor: Jérôme Gilles
 and Cooperation over the Internet Will Ferenc, Hannah Kastein, Lauren Lieu, Ryan Wilson Mentor: Jérôme Gilles UCLA Applied Mathematics REU 2011 Credit: c 2010 Bruce Avera Hunter, Courtesy of life.nbii.gov
and Cooperation over the Internet Will Ferenc, Hannah Kastein, Lauren Lieu, Ryan Wilson Mentor: Jérôme Gilles UCLA Applied Mathematics REU 2011 Credit: c 2010 Bruce Avera Hunter, Courtesy of life.nbii.gov
Smart Glasses Adoption in Smart Tourism Destination: A Conceptual Model
 Smart Glasses Adoption in Smart Tourism Destination: A Conceptual Model Pooyan Sedarati a, Aarash Baktash b a The Faculty of Economics University of Algarve, Portugal Pooyansedarati@gmail.com b Taylor
Smart Glasses Adoption in Smart Tourism Destination: A Conceptual Model Pooyan Sedarati a, Aarash Baktash b a The Faculty of Economics University of Algarve, Portugal Pooyansedarati@gmail.com b Taylor
Cooperative localization (part I) Jouni Rantakokko
 Jouni Rantakokko") Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
UDOT AUTOMATED TRAFFIC SIGNAL PERFORMANCE MEASURES
 UDOT AUTOMATED TRAFFIC SIGNAL PERFORMANCE MEASURES Jamie Mackey, P.E., PTOE Utah Department of Transportation Statewide Signal Engineer jamiemackey@utah.gov NOCoE Webinar Are Your Traffic Signals Ready
UDOT AUTOMATED TRAFFIC SIGNAL PERFORMANCE MEASURES Jamie Mackey, P.E., PTOE Utah Department of Transportation Statewide Signal Engineer jamiemackey@utah.gov NOCoE Webinar Are Your Traffic Signals Ready
The GATEway Project London s Autonomous Push
 The GATEway Project London s Autonomous Push 06/2016 Why TRL? Unrivalled industry position with a focus on mobility 80 years independent transport research Public and private sector with global reach 350+
The GATEway Project London s Autonomous Push 06/2016 Why TRL? Unrivalled industry position with a focus on mobility 80 years independent transport research Public and private sector with global reach 350+
Available online at ScienceDirect. Procedia Engineering 142 (2016 )
") Available online at www.sciencedirect.com ScienceDirect Procedia Engineering (0 ) Sustainable Development of Civil, Urban and Transportation Engineering Conference Methods for Designing Signalized Double-Intersections
Available online at www.sciencedirect.com ScienceDirect Procedia Engineering (0 ) Sustainable Development of Civil, Urban and Transportation Engineering Conference Methods for Designing Signalized Double-Intersections
Comparison of Wrap Around Screens and HMDs on a Driver s Response to an Unexpected Pedestrian Crossing Using Simulator Vehicle Parameters
 University of Iowa Iowa Research Online Driving Assessment Conference 2017 Driving Assessment Conference Jun 28th, 12:00 AM Comparison of Wrap Around Screens and HMDs on a Driver s Response to an Unexpected
University of Iowa Iowa Research Online Driving Assessment Conference 2017 Driving Assessment Conference Jun 28th, 12:00 AM Comparison of Wrap Around Screens and HMDs on a Driver s Response to an Unexpected
EVALUATION ALGORITHM- BASED ON PID CONTROLLER DESIGN FOR THE UNSTABLE SYSTEMS
 EVALUATION ALGORITHM- BASED ON PID CONTROLLER DESIGN FOR THE UNSTABLE SYSTEMS Erliza Binti Serri 1, Wan Ismail Ibrahim 1 and Mohd Riduwan Ghazali 2 1 Sustanable Energy & Power Electronics Research, FKEE
EVALUATION ALGORITHM- BASED ON PID CONTROLLER DESIGN FOR THE UNSTABLE SYSTEMS Erliza Binti Serri 1, Wan Ismail Ibrahim 1 and Mohd Riduwan Ghazali 2 1 Sustanable Energy & Power Electronics Research, FKEE
Manipulation. Manipulation. Better Vision through Manipulation. Giorgio Metta Paul Fitzpatrick. Humanoid Robotics Group.
 Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
Making Smart Robotics Smarter. Brian Mason West Coast Business Development Manager, Elmo Motion Control, Inc.
 Making Smart Robotics Smarter Brian Mason West Coast Business Development Manager, Elmo Motion Control, Inc. Making Smart Robotics Smarter Content Note: This presentation has been edited from the original
Making Smart Robotics Smarter Brian Mason West Coast Business Development Manager, Elmo Motion Control, Inc. Making Smart Robotics Smarter Content Note: This presentation has been edited from the original
Sponsored by. Nisarg Kothari Carnegie Mellon University April 26, 2011
 Sponsored by Nisarg Kothari Carnegie Mellon University April 26, 2011 Motivation Why indoor localization? Navigating malls, airports, office buildings Museum tours, context aware apps Augmented reality
Sponsored by Nisarg Kothari Carnegie Mellon University April 26, 2011 Motivation Why indoor localization? Navigating malls, airports, office buildings Museum tours, context aware apps Augmented reality
Proposed Watertown Plank Road Interchange Evaluation Using a Full Scale Driving Simulator
 Proposed Watertown Plank Road Interchange Evaluation Using a Full Scale Driving Simulator Kelvin R. Santiago-Chaparro, Dan Reichl, Andrea R. Bill, and David A. Noyce A full-scale driving simulator was
Proposed Watertown Plank Road Interchange Evaluation Using a Full Scale Driving Simulator Kelvin R. Santiago-Chaparro, Dan Reichl, Andrea R. Bill, and David A. Noyce A full-scale driving simulator was
Virtual Testing of Autonomous Vehicles
 Virtual Testing of Autonomous Vehicles Mike Dempsey Claytex Services Limited Software, Consultancy, Training Based in Leamington Spa, UK Office in Cape Town, South Africa Experts in Systems Engineering,
Virtual Testing of Autonomous Vehicles Mike Dempsey Claytex Services Limited Software, Consultancy, Training Based in Leamington Spa, UK Office in Cape Town, South Africa Experts in Systems Engineering,
Evaluation of automated vehicle behavior in intersection scenarios
 Evaluation of automated vehicle behavior in intersection scenarios Thomas Streubel, Pierre De Beaucorps, Fawzi Nashashibi To cite this version: Thomas Streubel, Pierre De Beaucorps, Fawzi Nashashibi. Evaluation
Evaluation of automated vehicle behavior in intersection scenarios Thomas Streubel, Pierre De Beaucorps, Fawzi Nashashibi To cite this version: Thomas Streubel, Pierre De Beaucorps, Fawzi Nashashibi. Evaluation
ITS Radiocommunications in Japan Progress report and future directions
 ITS Radiocommunications in Japan Progress report and future directions 6 March 2018 Berlin, Germany Tomoaki Ishii Assistant Director, New-Generation Mobile Communications Office, Radio Dept., Telecommunications
ITS Radiocommunications in Japan Progress report and future directions 6 March 2018 Berlin, Germany Tomoaki Ishii Assistant Director, New-Generation Mobile Communications Office, Radio Dept., Telecommunications