Simulationbased Development of ADAS and Automated Driving with the Help of Machine Learning
|
|
|
- Myron Rafe Ryan
- 5 years ago
- Views:
Transcription

1 Simulationbased Development of ADAS and Automated Driving with the Help of Machine Learning Dr. Andreas Kuhn A N D A T A München,
 Software Decision Support Systems Robustness and Complexity Management Failure prediction Anomalies and Incident Detection Big Data Analytics & AI & Simulation Data driven development")
2 2 Fields of Competence Artificial Intelligence Data Mining Big Data Analytics Modeling and simulation Predictive Model based Control Distributed Control Signal Classification Swarm Intelligence (Embedded) Software Decision Support Systems Robustness and Complexity Management Failure prediction Anomalies and Incident Detection Big Data Analytics & AI & Simulation Data driven development process Industry 4.0, Digitalization Automotive safety Vehicle and traffic automation (Mobile) Robotics Automated Guided Vehicle Contact: A-5400 Hallein, Hallburgstraße 5, ,


3 Audi AG A N D A A T AN D A T A 3 Advanced Driver Assistant Systems and Automated Driving Avoiding collisions by informing, warning, braking, steering, automated manoeuvres Which sensors are necessary for valid decisions in automated driving? What sensefull functions can be carried out with a given set of sensors?

4 4 Problem Statement Number, diversity and complexity of safety systems increases steadily Do we still underestimate the complexity of integral safety systems? What is the minimum/best set of test cases to sufficiently describe/specify/evaluate the system behaviour? How can we be sure?






5 5 Sources of Complexity Human beings are part of the control loop now! Systems have to anticipate the anticipation of other traffic participants It s about the difference between subjective and objective danger rather than about objective danger only
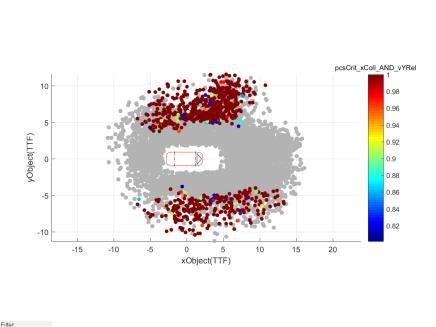
6 6 Sources of Complexity The problem is of stochastic nature! There are a lot of possibilities how a given situation can evolve? Action/reaction of driver/pedestrian Scatter of environmental conditions Uncertain vehicle conditions There is not one single certain Time to Collision (TTC) Time to Collision is a stochastic random variable Conditional probabilities: Bayes! p most probable TTC relative frequency TTC TTC
7 Sources of Complexity 7 The problem is mathematically instable! Even small changes in the initial/boundary conditions may lead to completely different collision conditions v 2 v 2 +e v 1 v 1

8 8 Sources of Complexity Conflicting requirements Incomplete information Audi AG
9 9 Consequences Taking a probabilistic/stochastic point of view Consequent Top-Down instead of Bottom-Up system development Analysis of field effectiveness instead of test effectiveness Increasing integration of simulation based development (scenario based approach) Broad application of data driven approaches (Big Data Analytics and Artificial Intelligence) Combined into Integral Development Process Almost completely carried out in MATLAB
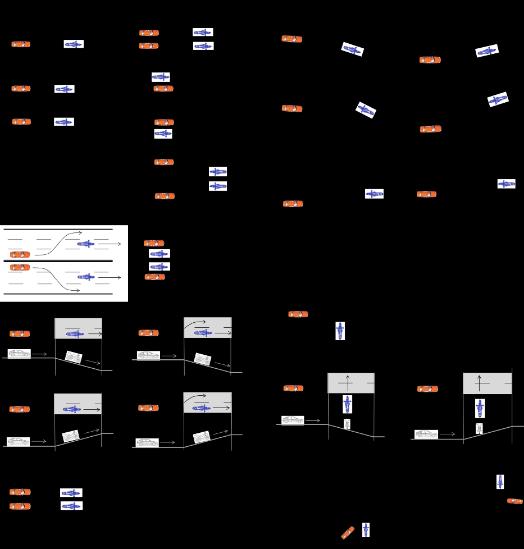
10 The Core Principle for Algorithm Development 10 Example based represenation of functional requirements Sensor signals Time window Market driven > Requirements/Spec Field of Effect Neural Networks, Machine Learning Algorithm Desired action Braking Warning t 1 +dt t 1 Restraint t t Sensors Algo Action Effect! > Visible to customer Functional requirement for algorithm: Which action to take when in which situations based on which sensors/information
11 Example Based Representation of Functional Requirements 11 Sensor signals Control Unit Control Algorithm Actorics Situation 1 Braking Warning Situation 2... Situation n Warning Braking Braking Warning

12 Data Acquisitions from Fleet Data 12

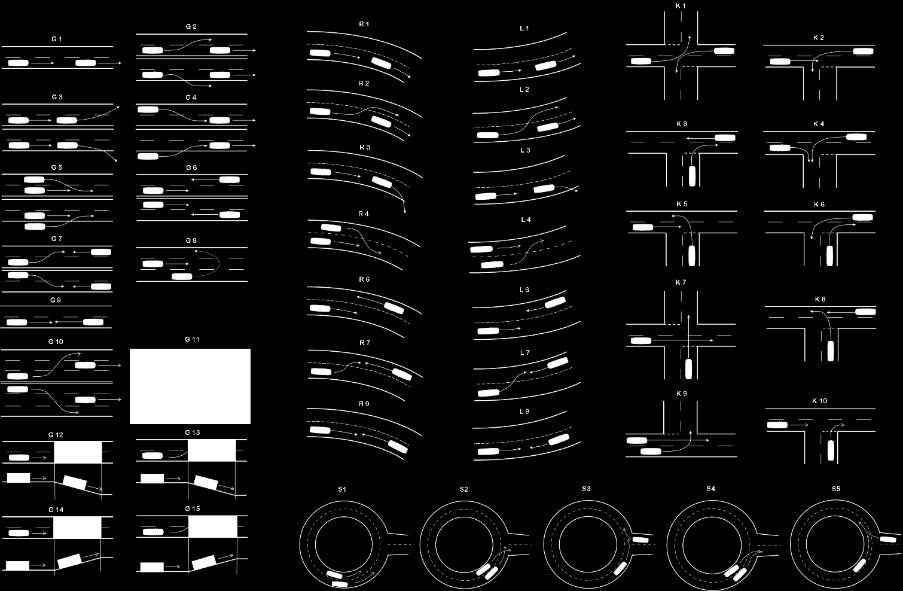
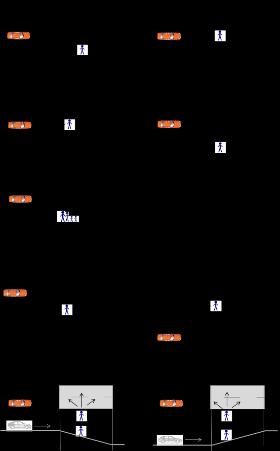
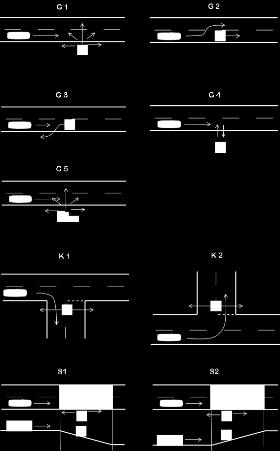
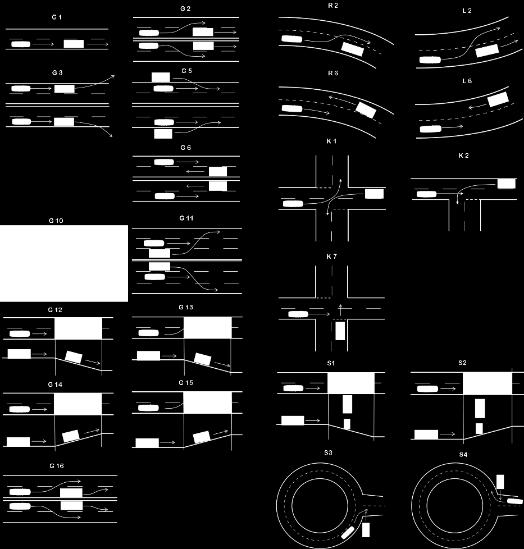
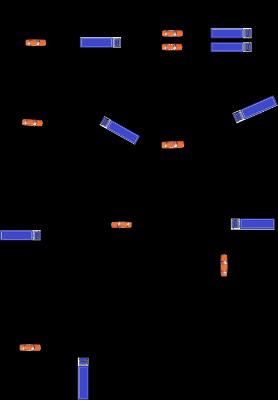
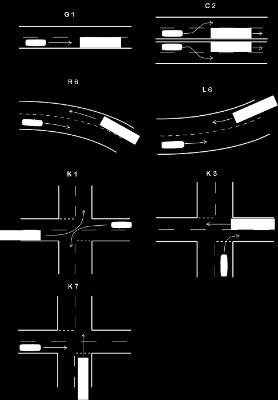
13 Scenario-Management and Development/Approval of Actions 13
14 Action Specification Based on Decision Points with Big Data Analytics 14


15 Folding Various Decision Variables (e.g. collision probabilities) 15, several granted and pending patents

16 Effectiveness Rating von Different System Variants 16

17 Numerical Conflict Analysis What is a requirements conflict for a control algorithm? In different situations, which induce the same sensor image, different actions are desired! Cluster analysis LC NF,1 LC NF,2 Conflict Conflict NoAct LC NF,n Conflict Conflict MustAct 17


18 ANDATA Solution Traffic Control 18 Problem description Model based predictive control of traffic flows Solution approach Scenario- & data based specification of function Functional algorithms with Artificial Intelligence Multi-level, stochastic simulation System-Engineering Pattern recognition Machine Learning Virtual sensors Effectivness rating Tools MATLAB Neural Networks Toolbox Statistics and Machine Learning Toolbox Div. ANDATA Toolboxen für MATLAB

19 ANDATA Solution Robotics, Production and Assembly 19 Problem description Development of control algorithms for mobile robots in industrial environments Solution approach Scenario based approaches Sensor signal modeling Kinematic simulation Intelligent algorithms for mapping, localization, path planning Tools MATLAB, Simulink/Stateflow Neural Networks Toolbox Statistics and Machine Learning Toolbox MATLAB Compiler, MATLAB Coder var. ANDATA Toolboxes for MATLAB
20 ANDATA Software and Tools 20 Data collection, preparation and normalization Data cleaning Sensor models Signal preparation Requirements definition ("labelling", etc.) Data analysis Training, adaption and evaluation of Machine Learning models Meta modelling, feature selection, etc. Scenario management Multilevel stochastic simulation Execution of distributed simulations Data plausibilization Anomalies and incident detection
21 21 Summary Scenario Management Operational Requirements Management Conflict analysis Proof of feasibility of the requirements Sensor concept evaluation and rating Effectiveness rating of system concept Uniform, integral product development process for traffic automation Design of experiments (What is the minimum test set to assure safe system functionality?) Virtual sensors, e.g. for estimation of collision probabilities Fast prototypical implementation Conform separation between specification and implementation Anomalies detection as quality assurance for simulation Extreme Development Procedures Extremely quick, efficient, effective, several granted and pending patents Carried out completely in MATLAB

22 22 Conclusion Extreme product development procedures with Big Data Analytics and Artificial Intelligence are not research anymore!, several granted and pending patents Just do it! Tools are available for decades now MATLAB / Simulink / Neural Networks Toolbox
23 23 Thanks, for listening! The singularity is near, let s be prepared! A N D A T A GmbH Dr. Andreas Kuhn Tel: office@andata.at Web:
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators. Roberto De Vecchi VI-grade Enrico Busto - AddFor
 ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
A Winning Combination
 A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
Transformation to Artificial Intelligence with MATLAB Roy Lurie, PhD Vice President of Engineering MATLAB Products
 Transformation to Artificial Intelligence with MATLAB Roy Lurie, PhD Vice President of Engineering MATLAB Products 2018 The MathWorks, Inc. 1 A brief history of the automobile First Commercial Gas Car
Transformation to Artificial Intelligence with MATLAB Roy Lurie, PhD Vice President of Engineering MATLAB Products 2018 The MathWorks, Inc. 1 A brief history of the automobile First Commercial Gas Car
Software Computer Vision - Driver Assistance
 Software Computer Vision - Driver Assistance Work @Bosch for developing desktop, web or embedded software and algorithms / computer vision / artificial intelligence for Driver Assistance Systems and Automated
Software Computer Vision - Driver Assistance Work @Bosch for developing desktop, web or embedded software and algorithms / computer vision / artificial intelligence for Driver Assistance Systems and Automated
A.I in Automotive? Why and When.
 A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
Intelligent Technology for More Advanced Autonomous Driving
 FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
How to build an autonomous anything
 How to build an autonomous anything Jim Tung jim@mathworks.com 2015 The MathWorks, Inc. 1 2 3 4 5 6 7 Autonomous Technology 8 Autonomy Having the power for self-governance 9 Autonomous Technology Provides
How to build an autonomous anything Jim Tung jim@mathworks.com 2015 The MathWorks, Inc. 1 2 3 4 5 6 7 Autonomous Technology 8 Autonomy Having the power for self-governance 9 Autonomous Technology Provides
Embracing Complexity. Gavin Walker Development Manager
 Embracing Complexity Gavin Walker Development Manager 1 MATLAB and Simulink Proven Ability to Make the Complex Simpler 1970 Stanford Ph.D. thesis, with thousands of lines of Fortran code 2 MATLAB and Simulink
Embracing Complexity Gavin Walker Development Manager 1 MATLAB and Simulink Proven Ability to Make the Complex Simpler 1970 Stanford Ph.D. thesis, with thousands of lines of Fortran code 2 MATLAB and Simulink
David Howarth. Business Development Manager Americas
 David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
VSI Labs The Build Up of Automated Driving
 VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
Automated Driving Systems with Model-Based Design for ISO 26262:2018 and SOTIF
 Automated Driving Systems with Model-Based Design for ISO 26262:2018 and SOTIF Konstantin Dmitriev The MathWorks, Inc. Certification and Standards Group 2018 The MathWorks, Inc. 1 Agenda Use of simulation
Automated Driving Systems with Model-Based Design for ISO 26262:2018 and SOTIF Konstantin Dmitriev The MathWorks, Inc. Certification and Standards Group 2018 The MathWorks, Inc. 1 Agenda Use of simulation
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
March 10, Greenbelt Road, Suite 400, Greenbelt, MD Tel: (301) Fax: (301)
 Fax: (301)") Detection of High Risk Intersections Using Synthetic Machine Vision John Alesse, john.alesse.ctr@dot.gov Brian O Donnell, brian.odonnell.ctr@dot.gov Stinger Ghaffarian Technologies, Inc. Cambridge, Massachusetts
Detection of High Risk Intersections Using Synthetic Machine Vision John Alesse, john.alesse.ctr@dot.gov Brian O Donnell, brian.odonnell.ctr@dot.gov Stinger Ghaffarian Technologies, Inc. Cambridge, Massachusetts
How Machine Learning and AI Are Disrupting the Current Healthcare System. Session #30, March 6, 2018 Cris Ross, CIO Mayo Clinic, Jim Golden, PwC
 How Machine Learning and AI Are Disrupting the Current Healthcare System Session #30, March 6, 2018 Cris Ross, CIO Mayo Clinic, Jim Golden, PwC 1 Conflicts of Interest: Christopher Ross, MBA Has no real
How Machine Learning and AI Are Disrupting the Current Healthcare System Session #30, March 6, 2018 Cris Ross, CIO Mayo Clinic, Jim Golden, PwC 1 Conflicts of Interest: Christopher Ross, MBA Has no real
Control Design Made Easy By Ryan Gordon
 Control Design Made Easy By Ryan Gordon 2014 The MathWorks, Inc. 1 Key Themes You can automatically tune PID controllers in MATLAB from acquired data You can automatically tune PID controllers from dynamic
Control Design Made Easy By Ryan Gordon 2014 The MathWorks, Inc. 1 Key Themes You can automatically tune PID controllers in MATLAB from acquired data You can automatically tune PID controllers from dynamic
A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS
 Tools and methodologies for ITS design and drivers awareness A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS Jan Gačnik, Oliver Häger, Marco Hannibal
Tools and methodologies for ITS design and drivers awareness A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS Jan Gačnik, Oliver Häger, Marco Hannibal
Significant Reduction of Validation Efforts for Dynamic Light Functions with FMI for Multi-Domain Integration and Test Platforms
 Significant Reduction of Validation Efforts for Dynamic Light Functions with FMI for Multi-Domain Integration and Test Platforms Dr. Stefan-Alexander Schneider Johannes Frimberger BMW AG, 80788 Munich,
Significant Reduction of Validation Efforts for Dynamic Light Functions with FMI for Multi-Domain Integration and Test Platforms Dr. Stefan-Alexander Schneider Johannes Frimberger BMW AG, 80788 Munich,
MSc(CompSc) List of courses offered in
 List of courses offered in") Office of the MSc Programme in Computer Science Department of Computer Science The University of Hong Kong Pokfulam Road, Hong Kong. Tel: (+852) 3917 1828 Fax: (+852) 2547 4442 Email: msccs@cs.hku.hk (The
Office of the MSc Programme in Computer Science Department of Computer Science The University of Hong Kong Pokfulam Road, Hong Kong. Tel: (+852) 3917 1828 Fax: (+852) 2547 4442 Email: msccs@cs.hku.hk (The
AI for Autonomous Ships Challenges in Design and Validation
 VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD AI for Autonomous Ships Challenges in Design and Validation ISSAV 2018 Eetu Heikkilä Autonomous ships - activities in VTT Autonomous ship systems Unmanned engine
VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD AI for Autonomous Ships Challenges in Design and Validation ISSAV 2018 Eetu Heikkilä Autonomous ships - activities in VTT Autonomous ship systems Unmanned engine
Sensing, Computing, Communication
 The Transformative Fusion of Sensing, Computing, Communication & Control 1 Three Key Points 1. Data driven decisions and algorithm design are accelerating innovation. 2. Four core technologies are fusing
The Transformative Fusion of Sensing, Computing, Communication & Control 1 Three Key Points 1. Data driven decisions and algorithm design are accelerating innovation. 2. Four core technologies are fusing
William Milam Ford Motor Co
 Sharing technology for a stronger America Verification Challenges in Automotive Embedded Systems William Milam Ford Motor Co Chair USCAR CPS Task Force 10/20/2011 What is USCAR? The United States Council
Sharing technology for a stronger America Verification Challenges in Automotive Embedded Systems William Milam Ford Motor Co Chair USCAR CPS Task Force 10/20/2011 What is USCAR? The United States Council
Dr George Gillespie. CEO HORIBA MIRA Ltd. Sponsors
 Dr George Gillespie CEO HORIBA MIRA Ltd Sponsors Intelligent Connected Vehicle Roadmap George Gillespie September 2017 www.automotivecouncil.co.uk ICV Roadmap built on Travellers Needs study plus extensive
Dr George Gillespie CEO HORIBA MIRA Ltd Sponsors Intelligent Connected Vehicle Roadmap George Gillespie September 2017 www.automotivecouncil.co.uk ICV Roadmap built on Travellers Needs study plus extensive
Automated Testing of Autonomous Driving Assistance Systems
 Automated Testing of Autonomous Driving Assistance Systems Lionel Briand Vector Testing Symposium, Stuttgart, 2018 SnT Centre Top level research in Information & Communication Technologies Created to fuel
Automated Testing of Autonomous Driving Assistance Systems Lionel Briand Vector Testing Symposium, Stuttgart, 2018 SnT Centre Top level research in Information & Communication Technologies Created to fuel
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles
 Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
A Roadmap for Connected & Autonomous Vehicles. David Skipp Ford Motor Company
 A Roadmap for Connected & Autonomous Vehicles David Skipp Ford Motor Company ! Why does an Autonomous Vehicle need a roadmap? Where might the roadmap take us? What should we focus on next? Why does an
A Roadmap for Connected & Autonomous Vehicles David Skipp Ford Motor Company ! Why does an Autonomous Vehicle need a roadmap? Where might the roadmap take us? What should we focus on next? Why does an
Stanford Center for AI Safety
 Stanford Center for AI Safety Clark Barrett, David L. Dill, Mykel J. Kochenderfer, Dorsa Sadigh 1 Introduction Software-based systems play important roles in many areas of modern life, including manufacturing,
Stanford Center for AI Safety Clark Barrett, David L. Dill, Mykel J. Kochenderfer, Dorsa Sadigh 1 Introduction Software-based systems play important roles in many areas of modern life, including manufacturing,
Sensing, Computing, Communication
 The Transformative Fusion of Sensing, Computing, Communication & Control 1 Three Key Points 1. Technologies are fusing together to transform industries, companies, employment, and education. 2. This is
The Transformative Fusion of Sensing, Computing, Communication & Control 1 Three Key Points 1. Technologies are fusing together to transform industries, companies, employment, and education. 2. This is
An Information Fusion Method for Vehicle Positioning System
 An Information Fusion Method for Vehicle Positioning System Yi Yan, Che-Cheng Chang and Wun-Sheng Yao Abstract Vehicle positioning techniques have a broad application in advanced driver assistant system
An Information Fusion Method for Vehicle Positioning System Yi Yan, Che-Cheng Chang and Wun-Sheng Yao Abstract Vehicle positioning techniques have a broad application in advanced driver assistant system
Intelligent Driving Agents
 Intelligent Driving Agents The agent approach to tactical driving in autonomous vehicles and traffic simulation Presentation Master s thesis Patrick Ehlert January 29 th, 2001 Imagine. Sensors Actuators
Intelligent Driving Agents The agent approach to tactical driving in autonomous vehicles and traffic simulation Presentation Master s thesis Patrick Ehlert January 29 th, 2001 Imagine. Sensors Actuators
Physics Based Sensor simulation
 Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
A Review of Related Work on Machine Learning in Semiconductor Manufacturing and Assembly Lines
 A Review of Related Work on Machine Learning in Semiconductor Manufacturing and Assembly Lines DI Darko Stanisavljevic VIRTUAL VEHICLE DI Michael Spitzer VIRTUAL VEHICLE i-know 16 18.-19.10.2016, Graz
A Review of Related Work on Machine Learning in Semiconductor Manufacturing and Assembly Lines DI Darko Stanisavljevic VIRTUAL VEHICLE DI Michael Spitzer VIRTUAL VEHICLE i-know 16 18.-19.10.2016, Graz
COMPUTATONAL INTELLIGENCE
 COMPUTATONAL INTELLIGENCE October 2011 November 2011 Siegfried Nijssen partially based on slides by Uzay Kaymak Leiden Institute of Advanced Computer Science e-mail: snijssen@liacs.nl Katholieke Universiteit
COMPUTATONAL INTELLIGENCE October 2011 November 2011 Siegfried Nijssen partially based on slides by Uzay Kaymak Leiden Institute of Advanced Computer Science e-mail: snijssen@liacs.nl Katholieke Universiteit
How to build an autonomous anything
 How to build an autonomous anything Loren Shure Application Engineering MathWorks 2015 The MathWorks, Inc. 1 2 3 4 5 6 7 Autonomous Technology 8 Autonomous Technology Having the power for self-governance
How to build an autonomous anything Loren Shure Application Engineering MathWorks 2015 The MathWorks, Inc. 1 2 3 4 5 6 7 Autonomous Technology 8 Autonomous Technology Having the power for self-governance
Sensing, Computing, Communication
 The Transformative Fusion of Sensing, Computing, Communication & Control Richard Rovner Vice President, Marketing MathWorks @RichardRovner 1 Three Key Points 1. Technologies are fusing together to transform
The Transformative Fusion of Sensing, Computing, Communication & Control Richard Rovner Vice President, Marketing MathWorks @RichardRovner 1 Three Key Points 1. Technologies are fusing together to transform
06 March Day Date All Streams. Thursday 03 May 2018 Engineering Mathematics II. Saturday 05 May 2018 Engineering Physics
 / SCHOOL OF TECHNOLOGY MANAGEMENT &ENGINEERING FINAL EXAMINATION TIME TABLE (ACADEMIC YEAR: 2017 18) MASTER OF BUSINESS ADMINISTRATION IN TECHNOLOGY MANAGEMENT (2017-22) YEAR: I, SEMESTER: II CAMPUS: MUMBAI,
/ SCHOOL OF TECHNOLOGY MANAGEMENT &ENGINEERING FINAL EXAMINATION TIME TABLE (ACADEMIC YEAR: 2017 18) MASTER OF BUSINESS ADMINISTRATION IN TECHNOLOGY MANAGEMENT (2017-22) YEAR: I, SEMESTER: II CAMPUS: MUMBAI,
The GATEway Project London s Autonomous Push
 The GATEway Project London s Autonomous Push 06/2016 Why TRL? Unrivalled industry position with a focus on mobility 80 years independent transport research Public and private sector with global reach 350+
The GATEway Project London s Autonomous Push 06/2016 Why TRL? Unrivalled industry position with a focus on mobility 80 years independent transport research Public and private sector with global reach 350+
HAVEit Highly Automated Vehicles for Intelligent Transport
 HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
Industrial Applications and Challenges for Verifying Reactive Embedded Software. Tom Bienmüller, SC 2 Summer School, MPI Saarbrücken, August 2017
 Industrial Applications and Challenges for Verifying Reactive Embedded Software Tom Bienmüller, SC 2 Summer School, MPI Saarbrücken, August 2017 Agenda 2 Who am I? Who is BTC Embedded Systems? Formal Methods
Industrial Applications and Challenges for Verifying Reactive Embedded Software Tom Bienmüller, SC 2 Summer School, MPI Saarbrücken, August 2017 Agenda 2 Who am I? Who is BTC Embedded Systems? Formal Methods
Industry 4.0: the new challenge for the Italian textile machinery industry
 Industry 4.0: the new challenge for the Italian textile machinery industry Executive Summary June 2017 by Contacts: Economics & Press Office Ph: +39 02 4693611 email: economics-press@acimit.it ACIMIT has
Industry 4.0: the new challenge for the Italian textile machinery industry Executive Summary June 2017 by Contacts: Economics & Press Office Ph: +39 02 4693611 email: economics-press@acimit.it ACIMIT has
Automotive Applications ofartificial Intelligence
 Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm) Automotive Applications ofartificial Intelligence Dr. David J. Atkinson Chassis
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm) Automotive Applications ofartificial Intelligence Dr. David J. Atkinson Chassis
This list supersedes the one published in the November 2002 issue of CR.
 PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
Available theses (October 2011) MERLIN Group
 MERLIN Group") Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Cyber-Physical Systems: Challenges for Systems Engineering
 Cyber-Physical Systems: Challenges for Systems Engineering agendacps Closing Event April 12th, 2012, EIT ICT Labs, Berlin Eva Geisberger fortiss An-Institut der Technischen Universität München Cyber-Physical
Cyber-Physical Systems: Challenges for Systems Engineering agendacps Closing Event April 12th, 2012, EIT ICT Labs, Berlin Eva Geisberger fortiss An-Institut der Technischen Universität München Cyber-Physical
WHO. 6 staff people. Tel: / Fax: Website: vision.unipv.it
 It has been active in the Department of Electrical, Computer and Biomedical Engineering of the University of Pavia since the early 70s. The group s initial research activities concentrated on image enhancement
It has been active in the Department of Electrical, Computer and Biomedical Engineering of the University of Pavia since the early 70s. The group s initial research activities concentrated on image enhancement
Symposium: Urban Energy innovation
 Symposium: Urban Energy innovation Smart Monitoring, Management & Control Referent: Simone Baldi (3mE, TU Delft) Co-Referent: Wilbert Prinssen (Technolution) Chair: Laure Itard (BK, TU Delft) 30 May, 2018
Symposium: Urban Energy innovation Smart Monitoring, Management & Control Referent: Simone Baldi (3mE, TU Delft) Co-Referent: Wilbert Prinssen (Technolution) Chair: Laure Itard (BK, TU Delft) 30 May, 2018
Available theses (October 2012) MERLIN Group
 MERLIN Group") Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
CYBERPHYSICAL LABORATORY
 5/23/2018 Andrea Calanca - Altair Lab 1 CYBERPHYSICAL LABORATORY Andrea Calanca 5/23/2018 Andrea Calanca - Altair Lab 2 The Practical Guy It works! But I don t know why. 5/23/2018 Andrea Calanca - Altair
5/23/2018 Andrea Calanca - Altair Lab 1 CYBERPHYSICAL LABORATORY Andrea Calanca 5/23/2018 Andrea Calanca - Altair Lab 2 The Practical Guy It works! But I don t know why. 5/23/2018 Andrea Calanca - Altair
Closed-Loop Transportation Simulation. Outlines
 Closed-Loop Transportation Simulation Deyang Zhao Mentor: Unnati Ojha PI: Dr. Mo-Yuen Chow Aug. 4, 2010 Outlines 1 Project Backgrounds 2 Objectives 3 Hardware & Software 4 5 Conclusions 1 Project Background
Closed-Loop Transportation Simulation Deyang Zhao Mentor: Unnati Ojha PI: Dr. Mo-Yuen Chow Aug. 4, 2010 Outlines 1 Project Backgrounds 2 Objectives 3 Hardware & Software 4 5 Conclusions 1 Project Background
Proposers Day Workshop
 Proposers Day Workshop Monday, January 23, 2017 @srcjump, #JUMPpdw Cognitive Computing Vertical Research Center Mandy Pant Academic Research Director Intel Corporation Center Motivation Today s deep learning
Proposers Day Workshop Monday, January 23, 2017 @srcjump, #JUMPpdw Cognitive Computing Vertical Research Center Mandy Pant Academic Research Director Intel Corporation Center Motivation Today s deep learning
ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES LYDIA GAUERHOF BOSCH CORPORATE RESEARCH
 ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES 14.12.2017 LYDIA GAUERHOF BOSCH CORPORATE RESEARCH Arguing Safety of Machine Learning for Highly Automated Driving
ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES 14.12.2017 LYDIA GAUERHOF BOSCH CORPORATE RESEARCH Arguing Safety of Machine Learning for Highly Automated Driving
Combining ROS and AI for fail-operational automated driving
 Combining ROS and AI for fail-operational automated driving Prof. Dr. Daniel Watzenig Virtual Vehicle Research Center, Graz, Austria and Institute of Automation and Control at Graz University of Technology
Combining ROS and AI for fail-operational automated driving Prof. Dr. Daniel Watzenig Virtual Vehicle Research Center, Graz, Austria and Institute of Automation and Control at Graz University of Technology
Intelligent driving TH« TNO I Innovation for live
 Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Surveillance and Calibration Verification Using Autoassociative Neural Networks
 Surveillance and Calibration Verification Using Autoassociative Neural Networks Darryl J. Wrest, J. Wesley Hines, and Robert E. Uhrig* Department of Nuclear Engineering, University of Tennessee, Knoxville,
Surveillance and Calibration Verification Using Autoassociative Neural Networks Darryl J. Wrest, J. Wesley Hines, and Robert E. Uhrig* Department of Nuclear Engineering, University of Tennessee, Knoxville,
Visvesvaraya Technological University, Belagavi
 Time Table for M.TECH. Examinations, June / July 2017 M. TECH. 2010 Scheme 2011 Scheme 2012 Scheme 2014 Scheme 2016 Scheme [CBCS] Semester I II III I II III I II III I II IV I II Time Date, Day 14/06/2017,
Time Table for M.TECH. Examinations, June / July 2017 M. TECH. 2010 Scheme 2011 Scheme 2012 Scheme 2014 Scheme 2016 Scheme [CBCS] Semester I II III I II III I II III I II IV I II Time Date, Day 14/06/2017,
Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings. Amos Gellert, Nataly Kats
 Mr. Amos Gellert Technological aspects of level crossing facilities Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings Deputy General Manager
Mr. Amos Gellert Technological aspects of level crossing facilities Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings Deputy General Manager
Microscopic traffic simulation with reactive driving agents
 2001 IEEE Intelligent Transportation Systems Conference Proceedings - Oakland (CA) USA = August 25-29, 2001 Microscopic traffic simulation with reactive driving agents Patrick A.M.Ehlert and Leon J.M.Rothkrantz,
2001 IEEE Intelligent Transportation Systems Conference Proceedings - Oakland (CA) USA = August 25-29, 2001 Microscopic traffic simulation with reactive driving agents Patrick A.M.Ehlert and Leon J.M.Rothkrantz,
Contents 1 Introduction Optical Character Recognition Systems Soft Computing Techniques for Optical Character Recognition Systems
 Contents 1 Introduction.... 1 1.1 Organization of the Monograph.... 1 1.2 Notation.... 3 1.3 State of Art.... 4 1.4 Research Issues and Challenges.... 5 1.5 Figures.... 5 1.6 MATLAB OCR Toolbox.... 5 References....
Contents 1 Introduction.... 1 1.1 Organization of the Monograph.... 1 1.2 Notation.... 3 1.3 State of Art.... 4 1.4 Research Issues and Challenges.... 5 1.5 Figures.... 5 1.6 MATLAB OCR Toolbox.... 5 References....
MotionDesk. 3-D online animation of simulated mechanical systems in real time. Highlights
 MotionDesk 3-D online animation of simulated mechanical systems in real time Highlights Tight integration to ModelDesk and ASM Enhanced support for all aspects of advanced driver assistance systems (ADAS)
MotionDesk 3-D online animation of simulated mechanical systems in real time Highlights Tight integration to ModelDesk and ASM Enhanced support for all aspects of advanced driver assistance systems (ADAS)
AI Application Processing Requirements
 AI Application Processing Requirements 1 Low Medium High Sensor analysis Activity Recognition (motion sensors) Stress Analysis or Attention Analysis Audio & sound Speech Recognition Object detection Computer
AI Application Processing Requirements 1 Low Medium High Sensor analysis Activity Recognition (motion sensors) Stress Analysis or Attention Analysis Audio & sound Speech Recognition Object detection Computer
PEGASUS Effectively ensuring automated driving. Prof. Dr.-Ing. Karsten Lemmer April 6, 2017
 PEGASUS Effectively ensuring automated driving. Prof. Dr.-Ing. Karsten Lemmer April 6, 2017 Starting Position for Automated Driving Top issue! Technology works Confidence Testing differently automated
PEGASUS Effectively ensuring automated driving. Prof. Dr.-Ing. Karsten Lemmer April 6, 2017 Starting Position for Automated Driving Top issue! Technology works Confidence Testing differently automated
Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System
 Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System By Dr. Kai Franke, Development Online Driver Assistance Systems, Volkswagen AG 10 Engineering Reality Magazine A
Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System By Dr. Kai Franke, Development Online Driver Assistance Systems, Volkswagen AG 10 Engineering Reality Magazine A
Invited talk IET-Renault Workshop Autonomous Vehicles: From theory to full scale applications Novotel Paris Les Halles, June 18 th 2015
 Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
Picked by a robot. Behavior Trees for real world robotic applications in logistics
 Picked by a robot Behavior Trees for real world robotic applications in logistics Magazino GmbH Landsberger Str. 234 80687 München T +49-89-21552415-0 F +49-89-21552415-9 info@magazino.eu www.magazino.eu
Picked by a robot Behavior Trees for real world robotic applications in logistics Magazino GmbH Landsberger Str. 234 80687 München T +49-89-21552415-0 F +49-89-21552415-9 info@magazino.eu www.magazino.eu
Getting to Smart Paul Barnard Design Automation
 Getting to Smart Paul Barnard Design Automation paul.barnard@mathworks.com 2012 The MathWorks, Inc. Getting to Smart WHO WHAT HOW autonomous, responsive, multifunction, adaptive, transformable, and smart
Getting to Smart Paul Barnard Design Automation paul.barnard@mathworks.com 2012 The MathWorks, Inc. Getting to Smart WHO WHAT HOW autonomous, responsive, multifunction, adaptive, transformable, and smart
Final Report Non Hit Car And Truck
 Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
Views from a patent attorney What to consider and where to protect AI inventions?
 Views from a patent attorney What to consider and where to protect AI inventions? Folke Johansson 5.2.2019 Director, Patent Department European Patent Attorney Contents AI and application of AI Patentability
Views from a patent attorney What to consider and where to protect AI inventions? Folke Johansson 5.2.2019 Director, Patent Department European Patent Attorney Contents AI and application of AI Patentability
The next level of intelligence: Artificial Intelligence. Innovation Day USA 2017 Princeton, March 27, 2017 Michael May, Siemens Corporate Technology
 The next level of intelligence: Artificial Intelligence Innovation Day USA 2017 Princeton, March 27, 2017, Siemens Corporate Technology siemens.com/innovationusa Notes and forward-looking statements This
The next level of intelligence: Artificial Intelligence Innovation Day USA 2017 Princeton, March 27, 2017, Siemens Corporate Technology siemens.com/innovationusa Notes and forward-looking statements This
Development & Simulation of a Test Environment for Vehicle Dynamics a Virtual Test Track Layout.
 Development & Simulation of a Test Environment for Vehicle Dynamics a Virtual Test Track Layout. PhD.C. -Eng. Kmeid Saad 1 1 Introduction... 2 2 Vehicle Dynamic Libraries... 3 3 Virtual Driver... 3 4 ROAD...
Development & Simulation of a Test Environment for Vehicle Dynamics a Virtual Test Track Layout. PhD.C. -Eng. Kmeid Saad 1 1 Introduction... 2 2 Vehicle Dynamic Libraries... 3 3 Virtual Driver... 3 4 ROAD...
Virtual Testing of Autonomous Vehicles
 Virtual Testing of Autonomous Vehicles Mike Dempsey Claytex Services Limited Software, Consultancy, Training Based in Leamington Spa, UK Office in Cape Town, South Africa Experts in Systems Engineering,
Virtual Testing of Autonomous Vehicles Mike Dempsey Claytex Services Limited Software, Consultancy, Training Based in Leamington Spa, UK Office in Cape Town, South Africa Experts in Systems Engineering,
Early Take-Over Preparation in Stereoscopic 3D
 Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI 18), September 23 25, 2018, Toronto, Canada. Early Take-Over
Adjunct Proceedings of the 10th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications (AutomotiveUI 18), September 23 25, 2018, Toronto, Canada. Early Take-Over
Interaction in Urban Traffic Insights into an Observation of Pedestrian-Vehicle Encounters
 Interaction in Urban Traffic Insights into an Observation of Pedestrian-Vehicle Encounters André Dietrich, Chair of Ergonomics, TUM andre.dietrich@tum.de CARTRE and SCOUT are funded by Monday, May the
Interaction in Urban Traffic Insights into an Observation of Pedestrian-Vehicle Encounters André Dietrich, Chair of Ergonomics, TUM andre.dietrich@tum.de CARTRE and SCOUT are funded by Monday, May the
A REACTIVE DRIVING AGENT FOR MICROSCOPIC TRAFFIC SIMULATION
 A REACTIVE DRIVING AGENT FOR MICROSCOPIC TRAFFIC SIMULATION Patrick A.M. Ehlert and Leon J.M. Rothkrantz Knowledge Based Systems Group Department of Information Technology and Systems Delft University
A REACTIVE DRIVING AGENT FOR MICROSCOPIC TRAFFIC SIMULATION Patrick A.M. Ehlert and Leon J.M. Rothkrantz Knowledge Based Systems Group Department of Information Technology and Systems Delft University
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
No. Crt Topic Titlte Topic Description Competence Area
 No. Crt Topic Titlte Topic Description Competence Area Real-time intersection manager according to current traffic. Vehicles will transmit their planned route to the central intersection manager, outside
No. Crt Topic Titlte Topic Description Competence Area Real-time intersection manager according to current traffic. Vehicles will transmit their planned route to the central intersection manager, outside
CS343 Introduction to Artificial Intelligence Spring 2010
 CS343 Introduction to Artificial Intelligence Spring 2010 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
CS343 Introduction to Artificial Intelligence Spring 2010 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
Can Artificial Intelligence pass the CPL(H) Skill Test?
 Skill Test?") Flight control systems for the autonomous electric light personal-transport aircraft of the near future. Can Artificial Intelligence pass the CPL(H) Skill Test? ICAS Workshop 2017-09-11 Dr. Luuk van Dijk
Flight control systems for the autonomous electric light personal-transport aircraft of the near future. Can Artificial Intelligence pass the CPL(H) Skill Test? ICAS Workshop 2017-09-11 Dr. Luuk van Dijk
Den femte digitaliseringsbølgen - fra data til innsikt!
 Den femte digitaliseringsbølgen - fra data til innsikt! 12.12.2017 Morten Dæhlen Professor/Dean Digitalization refers to the adoption of digital solutions by an organization, industry, country, etc. (Oxford
Den femte digitaliseringsbølgen - fra data til innsikt! 12.12.2017 Morten Dæhlen Professor/Dean Digitalization refers to the adoption of digital solutions by an organization, industry, country, etc. (Oxford
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts
 Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Fault Detection and Diagnosis-A Review
 Fault Detection and Diagnosis-A Review Karan Mehta 1, Dinesh Kumar Sharma 2 1 IV year Student, Department of Electronic Instrumentation and Control, Poornima College of Engineering 2 Assistant Professor,
Fault Detection and Diagnosis-A Review Karan Mehta 1, Dinesh Kumar Sharma 2 1 IV year Student, Department of Electronic Instrumentation and Control, Poornima College of Engineering 2 Assistant Professor,
Embedding Artificial Intelligence into Our Lives
 Embedding Artificial Intelligence into Our Lives Michael Thompson, Synopsys D&R IP-SOC DAYS Santa Clara April 2018 1 Agenda Introduction What AI is and is Not Where AI is being used Rapid Advance of AI
Embedding Artificial Intelligence into Our Lives Michael Thompson, Synopsys D&R IP-SOC DAYS Santa Clara April 2018 1 Agenda Introduction What AI is and is Not Where AI is being used Rapid Advance of AI
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Unlock the power of location. Gjermund Jakobsen ITS Konferansen 2017
 Unlock the power of location Gjermund Jakobsen ITS Konferansen 2017 50B 200 Countries mapped HERE in numbers Our world in numbers 7,000+ Employees in 56 countries focused on delivering the world s best
Unlock the power of location Gjermund Jakobsen ITS Konferansen 2017 50B 200 Countries mapped HERE in numbers Our world in numbers 7,000+ Employees in 56 countries focused on delivering the world s best
Patentability of Computer-Implemented Inventions and Artificial Intelligence at the European Patent Office
 Patentability of Computer-Implemented Inventions and Artificial Intelligence at the Miguel Domingo Vecchioni XXI International Conference of Rospatent Moscow, 19-20 September 2018 The European member states
Patentability of Computer-Implemented Inventions and Artificial Intelligence at the Miguel Domingo Vecchioni XXI International Conference of Rospatent Moscow, 19-20 September 2018 The European member states
Visualizing the future of field service
 Visualizing the future of field service Wearables, drones, augmented reality, and other emerging technology Humans are predisposed to think about how amazing and different the future will be. Consider
Visualizing the future of field service Wearables, drones, augmented reality, and other emerging technology Humans are predisposed to think about how amazing and different the future will be. Consider
Multi-Robot Coordination. Chapter 11
 Multi-Robot Coordination Chapter 11 Objectives To understand some of the problems being studied with multiple robots To understand the challenges involved with coordinating robots To investigate a simple
Multi-Robot Coordination Chapter 11 Objectives To understand some of the problems being studied with multiple robots To understand the challenges involved with coordinating robots To investigate a simple
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
Deliverable D1.6 Initial System Specifications Executive Summary
 Deliverable D1.6 Initial System Specifications Executive Summary Version 1.0 Dissemination Project Coordination RE Ford Research and Advanced Engineering Europe Due Date 31.10.2010 Version Date 09.02.2011
Deliverable D1.6 Initial System Specifications Executive Summary Version 1.0 Dissemination Project Coordination RE Ford Research and Advanced Engineering Europe Due Date 31.10.2010 Version Date 09.02.2011
Data processing framework for decision making
 Data processing framework for decision making Jan Larsen Intelligent Signal Processing Group Department of Informatics and Mathematical Modelling Technical University of Denmark jl@imm.dtu.dk, www.imm.dtu.dk/~jl
Data processing framework for decision making Jan Larsen Intelligent Signal Processing Group Department of Informatics and Mathematical Modelling Technical University of Denmark jl@imm.dtu.dk, www.imm.dtu.dk/~jl
PEDESTRIAN PROTECTION BASED ON COMBINED SENSOR SYSTEMS
 PEDESTRIAN PROTECTION BASED ON COMBINED SENSOR SYSTEMS Dr. Jan Tilp, Dr. Ralf Walther, Dr. Soenke Carstens-Behrens, Claudia Zehder, Dr. Christian Zott Robert Bosch GmbH, Stuttgart, Germany Dr. Thomas Fischer,
PEDESTRIAN PROTECTION BASED ON COMBINED SENSOR SYSTEMS Dr. Jan Tilp, Dr. Ralf Walther, Dr. Soenke Carstens-Behrens, Claudia Zehder, Dr. Christian Zott Robert Bosch GmbH, Stuttgart, Germany Dr. Thomas Fischer,
Automotive Needs and Expectations towards Next Generation Driving Simulation
 Automotive Needs and Expectations towards Next Generation Driving Simulation Dr. Hans-Peter Schöner - Insight fromoutside -Consulting - Senior Automotive Expert, Driving Simulation Association September
Automotive Needs and Expectations towards Next Generation Driving Simulation Dr. Hans-Peter Schöner - Insight fromoutside -Consulting - Senior Automotive Expert, Driving Simulation Association September
LANEKEEPING WITH SHARED CONTROL
 MDYNAMIX AFFILIATED INSTITUTE OF MUNICH UNIVERSITY OF APPLIED SCIENCES LANEKEEPING WITH SHARED CONTROL WHICH ISSUES HAVE TO BE RESEARCHED? 3rd International Symposium on Advanced Vehicle Technology 1 OUTLINE
MDYNAMIX AFFILIATED INSTITUTE OF MUNICH UNIVERSITY OF APPLIED SCIENCES LANEKEEPING WITH SHARED CONTROL WHICH ISSUES HAVE TO BE RESEARCHED? 3rd International Symposium on Advanced Vehicle Technology 1 OUTLINE
Model-Based Design for Sensor Systems
 2009 The MathWorks, Inc. Model-Based Design for Sensor Systems Stephanie Kwan Applications Engineer Agenda Sensor Systems Overview System Level Design Challenges Components of Sensor Systems Sensor Characterization
2009 The MathWorks, Inc. Model-Based Design for Sensor Systems Stephanie Kwan Applications Engineer Agenda Sensor Systems Overview System Level Design Challenges Components of Sensor Systems Sensor Characterization
Intelligent Tyre Promoting Accident-free Traffic
 Intelligent Tyre Promoting Accident-free Traffic 1 Introduction Research and development work in automotive industry has been focusing at an intensified pace on developing vehicles with intelligent powertrain
Intelligent Tyre Promoting Accident-free Traffic 1 Introduction Research and development work in automotive industry has been focusing at an intensified pace on developing vehicles with intelligent powertrain
CS343 Introduction to Artificial Intelligence Spring 2012
 CS343 Introduction to Artificial Intelligence Spring 2012 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
CS343 Introduction to Artificial Intelligence Spring 2012 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
Current Technologies in Vehicular Communications
 Current Technologies in Vehicular Communications George Dimitrakopoulos George Bravos Current Technologies in Vehicular Communications George Dimitrakopoulos Department of Informatics and Telematics Harokopio
Current Technologies in Vehicular Communications George Dimitrakopoulos George Bravos Current Technologies in Vehicular Communications George Dimitrakopoulos Department of Informatics and Telematics Harokopio
5G R&D at Huawei: An Insider Look
 5G R&D at Huawei: An Insider Look Accelerating the move from theory to engineering practice with MATLAB and Simulink Huawei is the largest networking and telecommunications equipment and services corporation
5G R&D at Huawei: An Insider Look Accelerating the move from theory to engineering practice with MATLAB and Simulink Huawei is the largest networking and telecommunications equipment and services corporation
Powerful But Limited: A DARPA Perspective on AI. Arati Prabhakar Director, DARPA
 Powerful But Limited: A DARPA Perspective on AI Arati Prabhakar Director, DARPA Artificial intelligence Three waves of AI technology (so far) Handcrafted knowledge Statistical learning Contextual adaptation
Powerful But Limited: A DARPA Perspective on AI Arati Prabhakar Director, DARPA Artificial intelligence Three waves of AI technology (so far) Handcrafted knowledge Statistical learning Contextual adaptation
MOBY-DIC. Grant Agreement Number Model-based synthesis of digital electronic circuits for embedded control. Publishable summary
 MOBY-DIC Grant Agreement Number 248858 Model-based synthesis of digital electronic circuits for embedded control Report version: 1 Due date: M24 (second periodic report) Period covered: December 1, 2010
MOBY-DIC Grant Agreement Number 248858 Model-based synthesis of digital electronic circuits for embedded control Report version: 1 Due date: M24 (second periodic report) Period covered: December 1, 2010
JNTUH COLLEGE OF ENGINEERING (Autonomous) EXAMINATIONS BRANCH, HYDERABAD - 85
 EXAMINATIONS BRANCH, HYDERABAD - 85") Branch : COMPUTER SCIENCE Passed in Subject: (CS701) ADVANCED PROBLEM SOLVING Passed in Subject: (CS711) ADVANCED DATA STRUCTURES & ALGORITHMS 14011D0518 Passed in Subject: (CS712) ADVANCED DATABASE ENGINEERING
Branch : COMPUTER SCIENCE Passed in Subject: (CS701) ADVANCED PROBLEM SOLVING Passed in Subject: (CS711) ADVANCED DATA STRUCTURES & ALGORITHMS 14011D0518 Passed in Subject: (CS712) ADVANCED DATABASE ENGINEERING
OSMANIA UNIVERSITY No.15 /BE/Exams/TT TIME-TABLE
 No.15 /BE/Exams/TT2012 05-04-2013 TIME-TABLE B.E. I/IV (REGULAR) (Main) EXAMINATIONS: MAY/JUNE, 2013 Time: 10.00 a.m. to 1.00 p.m. Subject 04-06-2013 11-0-2013 15-06-2013 20-06-2013 24-06-2013 26-06-2013
No.15 /BE/Exams/TT2012 05-04-2013 TIME-TABLE B.E. I/IV (REGULAR) (Main) EXAMINATIONS: MAY/JUNE, 2013 Time: 10.00 a.m. to 1.00 p.m. Subject 04-06-2013 11-0-2013 15-06-2013 20-06-2013 24-06-2013 26-06-2013