GPS SOLVES THE COMBAT PILOT TRAINING RANGE PROBLEMS
|
|
|
- Curtis Wilson
- 5 years ago
- Views:
Transcription
1 GPS SOLVES THE COMBAT PILOT TRAINING RANGE PROBLEMS Item Type text; Proceedings Authors Hoefener, Carl E.; Wechel, Robert Van Publisher International Foundation for Telemetering Journal International Telemetering Conference Proceedings Rights Copyright International Foundation for Telemetering Download date 10/07/ :13:37 Link to Item
2 GPS SOLVES THE COMBAT PILOT TRAINING RANGE PROBLEMS Carl E. Hoefener and Robert Van Wechel Interstate Electronics Corporation 1001 E. Bell Rd., P. 0. Box 3117 Anaheim, CA ABSTRACT For more than 20 years combat pilot training instrumentation has taken place on Air Force and Navy TACTS/ACMI ranges. The original ranges were designed to instrument a cylinder in space 30 miles in diameter from 5,000 feet to 55,000 feet and to handle up to eight participants. As fighter combat techniques have advanced and battle tactics have been revised to take into account more advanced weapons systems, the capabilities of the existing ranges have become extremely taxed. For example, modifications have been added on to the original systems so that the tracking altitude could be lowered to 100 feet (by adding radar altimeters to the instrumentation pods); the number of participants could be increased to 36 (by lowering the system sample rates), and the range area could be expanded (by increasing the number of ground tracking sites required from seven to a dozen or more). Clearly these were bandaid fixes, and the total capability of the ranges suffered, but since no satisfactory alternate systems were available, these systems continue to be used. During the past twenty years, however, significant advances have taken place in all areas of instrumentation system technology. By the application of modern technology, a new generation of air combat training ranges cm be made available that will greatly enhance the training capability of our armed forces and will be capable of training them in the new tactics required by the fighter weapons systems of the future. Among these training advantages will be the following capabilities:! Tracking over an entire 25,000-square-mile or larger range area.! Precision tracking of up to 100 participants.! Tracking of all vehicles from ground level to 100,000-foot altitude.! Only a few nonsurveyed portable groundsites will be required.
3 ! An unlimited number of portable unmanned threat emitters can be provided at a fraction of the cost of existing threats.! The entire range can be made portable.! Modern display capability will greatly enhance pilot recall ability required for mission debriefing. By applying GPS, optimizing the datalinks, and restructuring the range design concept, these advantages can be realized. This paper discusses the application of modern range system technology to the design of the TACTS/ACMI ranges of the future. INTRODUCTION The use of existing Global Positioning System (GPS) receivers and advanced datalinks provides the capability of unlimited air combat maneuvering area, very low-altitude instrumentation coverage in remote uninstrumented areas, uses fewer groundsites that are portable and not surveyed, and provides enhanced capabilities for the use of low-cost threat emitters for more effective and realistic air combat training. The architecture of this advanced type of air combat training system is an extension of the highly successful air combat maneuvering instrumentation (ACMI) system currently in use [1] but replaces the surface-based multilateration tracking solution with one that is participant-based, utilizing GPS satellite measurements and outboard distributed processing. With the tracking solution thus independent of the air-to-ground datalink, advanced datalink concepts can be used, allowing player-to-player or player-to-high-flyer aircraft relay. In this way, extremely large air combat maneuvering areas can be instrumented with uniformly high tracking accuracy, and very remote low-flying players can be tracked and their data recovered by the relay datalink. The pod-mounted GPS receivers required are developed, and test results are available [2] showing 6 ft and 1.7 ft/sec horizontal errors and 12 fit and 2.7 ft/sec, vertical position errors. An advanced datalink is also in development [3], which provides the player-toplayer relay capability. With the modernization of air warfare and the resulting sophistication of air weapon systems, the need for combat pilot training has increased significantly during the past 20 years. Advanced air warfare tactics result in the requirement for extensive low-level flying to provide terrain screening against threat systems. Aircrew training in the tactics of modern air-warfare, therefore, requires extensive areas of unrestricted airspace down to ground level. Precision position of the training aircraft must be known at all times over this entire airspace. Modern training requirements now require keeping track of the precise
4 position of up to 100 aircraft over an area of up to 25,000 square miles at altitudes from ground level to 100,000 feet. In addition, environmental considerations for such large range areas demand that this instrumentation be accomplished with a few portable groundsites and still obtain high position accuracy of all of the players. These are the requirements that tax the capability of our existing air combat training systems. ACMI ARCHITECTURE The currently used ACMI architecture is illustrated in Figure 1 [1]. A group of surfacebased remote stations is deployed on the range area on surveyed and geodetically stable sites. For ground application these are solarpowered and are mounted on towers. Over water, they are also towers, since position location depends upon their being stable and in surveyed locations. Older systems employed these towers typically on a 30-mile-diameter circle, and the instrumented airspace extended from about 5,000 to 50,000 feet in altitude. Newer system have been expanded to cover a 20- by 65-mile area for monitoring aircraft down to 100 feet, and 95 by 40 miles for coverage down to 500 feet above ground level [4]. This was done by adding more ground stations and a radar altimeter in the pod. The description of the ACMI system operation from reference 1 is as follows: The remote stations are controlled by the Tracking Instrumentation Subsystem (TIS) master station, normally located within line-of-sight of all the remote stations to avoid relay stations. The master station measures the loop range from the master to the station selected to be the interrogator, then to the selected pod of the Airborne Instrumentation Subsystem (AIS), and back to remote and master stations. Each remote station receives the pod transmission and returns the signal to the master, providing simultaneous range measurement to all remote stations. The range from each remote to master station is realtime calibrated and subtracted from the loop range to provide slant range from each remote station to the particular aircraft being interrogated. Each participant on the range is interrogated in turn through the remote station most likely to achieve the communication link. All participants are interrogated at least five times per second (this was later reduced to add more players to the system). Digital data is transmitted from the master station to the pod and in turn receives digital data from the pod during each interrogation. The master station formats collected data and interfaces to the Control and Computation Subsystem (CCS) via a microwave datalink. The CCS contains the main data processor for the system and provides executive software for system control. Kalman filtering of all aircraft state vector data and weapon simulation provides the best estimate of state vector, air data, and range status to the DDS at a rate of 10 per second. The Display and Debriefing Subsystem (DDS) is the manmachine interface and provides realtime display and control of the entire system.
5 Multiple DDS can be interfaced to the CCS to allow control, monitoring, backup, and replay simultaneously. This system has been extremely successful for combat pilot training. A great number of installations have been made, and it is currently by far the most successful system for combat pilot training ever conceived [4]. Since the multilateration stations are all on the ground, the vertical dilution of precision (VDOP) of the system is very poor at low altitudes up to about 5,000 feet. This characteristic limits the vertical accuracy at low altitude and forces use of a radar altimeter [4] to supplement the vertical measurements. Also, as explained in the system description, the master station must be in line-of-sight of the remote stations unless relay stations are used. This factor puts limitations on the size range area that can reasonably be covered. GPS RAP EQUIPMENT [2, 3] Office of the Undersecretary of Defense for Research and Engineering provides the instrumentation for the Major Range and Test Facility Base (MRTFB). In 1981 this office investigated the use of an orbiting radio multilateration system, the Navstar GPS to meet the time and space-position information (TSPI) requirements of the MRTFB. A tri-service GPS range applications steering committee contracted with The Analytic Science Company (TASC) to summarize these requirements. The study sampled 22 ranges, including Training Ranges and Operational Test and Evaluation (OT&E) ranges, as well as Developmental Test and Evaluation (DT&E) ranges. The final steering committee report in January 1983 concluded that GPS could satisfy about 95 percent of TSPI range requirements and would be cost effective. The Range Applications Joint Program Office (RAJPO) was established at the United States Air Force Armament Division at Eglin Air Force Base in Mr. Tom Hancock was appointed program manager of the Tri-Service GPS-RAP. A Transition Advisory Group was established to create the specifications for the GPS range hardware and system. A contract to perform the full-scale engineering development of the GPS-RAP system was awarded to Interstate Electronics in 1985.
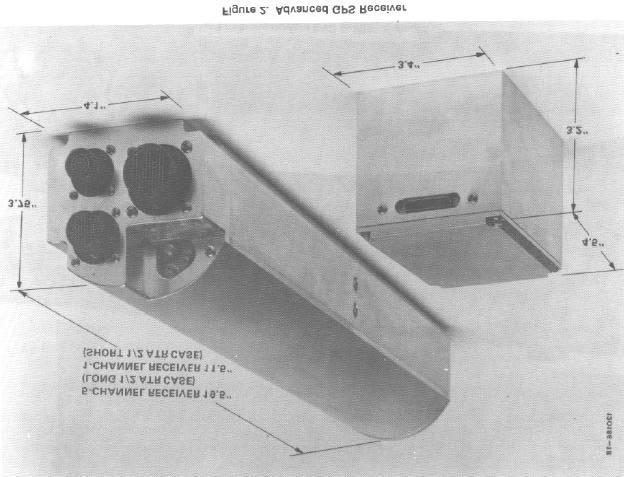
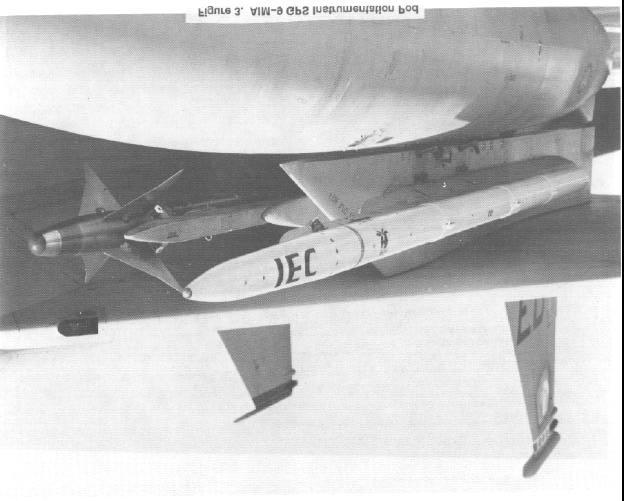
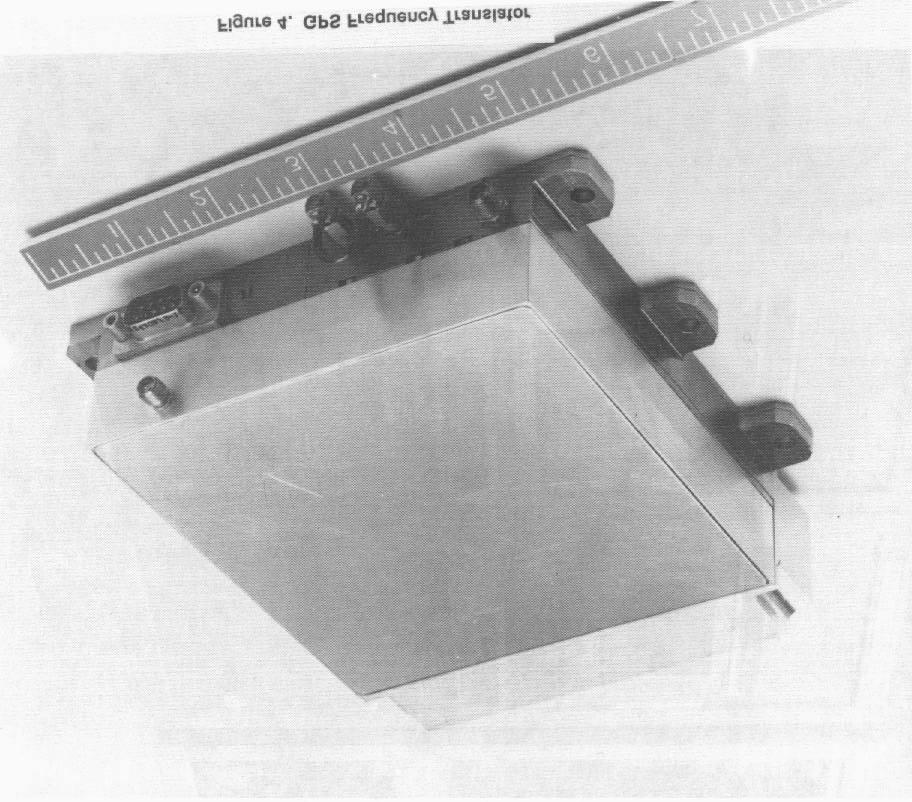
6 As a result of this development, pod-mounted GPS receivers have been developed and are in test [2]. Also, an advanced datalink is in development [3]. Early test results indicate that the accuracy specifications of Table 1 are being met, providing equipment that exceeds ACMI accuracy requirements. Accuracy improvement, however, is only a minor part of the improved capability afforded by GPS in an ACMI system. Table 1. Realtime Accuracy Under Dynamic Conditions HDOP = 1.5, VDOP = 2.5 Differential P-Code Inertial Aiding Dynamics to 10g and 10g/sec RMS RMS Accuracy Position (ft) Horizontal 6 Vertical 12 Velocity (f) Horizontal 1.7 Vertical 2.7 Two basic techniques must be considered when utilizing GPS for the instrumentation of a flight test vehicle. These are the use of a GPS receiver aboard the vehicle and datalinking its position to a ground station, or recording onboard or the use of a GPS frequency translator aboard the vehicle, which simply receives the satellite signals at L-band and retransmits them to a ground station at S-band. The position solution of the test vehicle is then performed at the ground station. There are many advantages to the use of a GPS frequency translator tracking system. These advantages include small size and weight, low cost, rapid signal acquisition and time-to-first-fix, the ability to predetect record the GPS signals for postflight analysis at the ground station, a 6-dB carrier tracking advantage over an onboard receiver, an inherently differential system and postflight optimization of position determination. The principal advantages of the use of an onboard GPS receiver for position determination are that the position is known aboard the test vehicle, downlink encryption is possible, and there is no theoretical limitation to the number of test vehicles to be tracked simultaneously. Pictures of the various types of GPS flight test instrumentation hardware are shown in the following Figures. Figure 2 illustrates a GPS instrumentation receiver, while figure 3 depicts a GPS instrumentation pod containing GPS receiver, inertial reference unit, datalink, encryption device, and data recorder. Figure 4 contains a GPS frequency
7 translator, and Figure 5 shows a translator processing system. All of this hardware has been produced and is currently operating at flight test ranges in the United States. The vertical dilution of precision (VDOP) of the GPS system varies typically from 2 to 4 (with a full-satellite constellation) with 2.5 being typically used for specification purposes, making use of a radar altimeter unnecessary. GPS IN AIR COMBAT TRAINING SYSTEMS With the tremendous success of current ACMI systems, why change it? A great many pods are in the inventory. Wouldn t it be best to stay with the current architecture? After all, it has been extremely successful. To take advantage of the benefits of GPS, major changes in existing system architecture must occur. Simply adding GPS to the existing systems with no other changes does not begin to exploit the available benefits. The potential benefits from full use of the GPS capabilities are outlined in the section Advantages of the GPS Approach. The required ground systems would be minimized, and some 8 (16 in the Red Flag Measurement and Debriefing System [4] stable and surveyed ground locations for position location would no longer be required. The new datalink could accommodate player-to-player data relay so that the entire enlarged range area could be covered down to ground level with a minimum number of groundsites, depending upon the terrain. Each GPS pod would also be equipped with a single-card solid-state recorder so that complete replay of the training mission could be performed postflight if data transmission from the vehicles to the ground station were interrupted. The existing mission debrief display systems do an outstanding job. Advantages of advanced display technology, however, could enhance the recall ability of the pilots during postmission analysis and also improve display of terrain screening effects. Fortunately, most of the software would be useful in its present form. ADVANTAGES OF THE GPS APPROACH The advantages for the GPS are discussed in the following paragraphs. Unlimited Instrumentation Area GPS affords the possibility of greatly expanding the air combat maneuvering area since it is a satellite-based system not requiring that ground-based installations be spread over the entire area. With advanced datalinks (such as the RAJPO datalink) having player-to-player
8 relay, it is even possible to operate at 100-foot altitudes way beyond the instrumented area by using a high-flying aircraft for data relay purposes. This concept of operation is not possible in the current ACMI architecture because player-to-player relay cannot occur with the ranging and data transmission combined into one link. This greatly limits the area of coverage since line-of-sight is required from at least three surveyed ground stations. The result is that the participant aircraft can pass over the instrumented area in a very few minutes. Thus, GPS affords the advantage of instrumenting engagements in a more realistic manner over an unlimited area. Low-Altitude Coverage In Remote Uninstrumented Areas Modern air warfare and electronic combat operations rely heavily upon terrain screening to avoid detection by radar-controlled SAM sites. GPS, when used with a modern datalink having player-to-player relay, affords the possibility of instrumenting the participants even when flying in remote valleys to obtain terrain screening. It thus expands the training possibilities. Fewer Surface Sites, Portable and Not Surveyed By nature, a GPS approach requires only ground or surface sites for communication purposes and not for location. They do not have to be surveyed, and more significantly, they do not even have to be stationary. When operating over water, they could be tethered buoys with some random motion, making them much more cost effective than the stationary surveyed towers used for over-water ACMI systems. Ground-based communication sites can be portable and unsurveyed, allowing a portable air combat training range. As mentioned before, even high-flying aircraft can be used for relay purposes and could be used as datalink remote stations with advanced datalink architectures. Makes TSPI Independent of Datalink By separating the position location function from the datalink, advanced datalink concepts can be used. One mentioned above is player-to-player or player-to-relay aircraft, which allows instrumenting players at low altitude in remote areas. Also, multiple datalink frequencies can be used for the air-to-ground data to greatly increase the number of players.
9 GPS-Steered Threats GPS-steered unmanned threat emitters [4, 5] can be used in place of the costly existing manned threats and can be configured to be controlled with less time delay and greater accuracy than through the ACMI system. Accuracy GPS position accuracies have been shown in RAP testing [2] already done (and more is now being done) to be on the order of 6 ft and 1.7 ft/sec horizontal and 12 ft with 2.7 ft/sec vertical when differential GPS is used. More is involved than just these accuracy numbers. With GPS, the position, velocity, and acceleration are computed onboard the aircraft; thus the inherent accuracy is not dependent on datalink dropouts caused by terrain or aircraft masking, etc. With ground-based multilateration as used in the ACMI, a radar altimeter must be used to get vertical accuracy at low altitude since the geometry of the tracking stations is in a plane. The altimeter is not necessary with GPS. CONCLUSIONS The use of GPS along with advanced datalinks, such as the RAP datalink, opens up many new dimensions in air combat training, such as unlimited instrumentation area, low-altitude coverage even in remote valleys, fewer groundsites, use of only portable unsurveyed groundsites and new possibilities in economical threat emitters. REFERENCES 1. Eaton, G.W., Air Combat Maneuvering Range/Instrumentation ACMR/I, IEEE PLANS 76, Position Location and Navigation Symposium, Nov 1-3, 1976k, IEEE Pub. 76CH AES. 2. Kaatz, G., T. Kido,, C. Richmond and R. Snow, Test Results for the High Dynamics Instrumentation Set (HDIS), presented to the Institute of Navigation Satellite Division Technical Meeting, Proceedings of ION GPS-89, September 1989, pp Birnbaum, M., R.F. Quick Jr., K.S. Gilhousen and J. Blanda, Range Applications Joint Program Office GPS Range Datalink, presented to the Institute of Navigation Satellite Division Technical Meeting, Proceedings of ION GPS-89, September 1989, pp
10 4. Kempf, P.T., A New Dimension in Aircrew/EW Training, Red Flag Measurement and Debriefing System, Journal of Electronic Defense, Sept. 1986, pp Giadrosich, D.L., Range Instrumentation for Electronic Combat, Journal of Electronic Defense, Sept. 1986, pp Figure 1. Representative ACMR/I Configuration
11
12
13

14
Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation
 Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation Zhaonian Zhang, Department of Geomatics Engineering, The University of Calgary BIOGRAPHY Zhaonian Zhang is a MSc student
Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation Zhaonian Zhang, Department of Geomatics Engineering, The University of Calgary BIOGRAPHY Zhaonian Zhang is a MSc student
Unmanned Air Systems. Naval Unmanned Combat. Precision Navigation for Critical Operations. DEFENSE Precision Navigation
 NAVAIR Public Release 2012-152. Distribution Statement A - Approved for public release; distribution is unlimited. FIGURE 1 Autonomous air refuleing operational view. Unmanned Air Systems Precision Navigation
NAVAIR Public Release 2012-152. Distribution Statement A - Approved for public release; distribution is unlimited. FIGURE 1 Autonomous air refuleing operational view. Unmanned Air Systems Precision Navigation
Proceedings of Al-Azhar Engineering 7 th International Conference Cairo, April 7-10, 2003.
 Proceedings of Al-Azhar Engineering 7 th International Conference Cairo, April 7-10, 2003. MODERNIZATION PLAN OF GPS IN 21 st CENTURY AND ITS IMPACTS ON SURVEYING APPLICATIONS G. M. Dawod Survey Research
Proceedings of Al-Azhar Engineering 7 th International Conference Cairo, April 7-10, 2003. MODERNIZATION PLAN OF GPS IN 21 st CENTURY AND ITS IMPACTS ON SURVEYING APPLICATIONS G. M. Dawod Survey Research
Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model
 Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model by Dr. Buddy H Jeun and John Younker Sensor Fusion Technology, LLC 4522 Village Springs Run
Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model by Dr. Buddy H Jeun and John Younker Sensor Fusion Technology, LLC 4522 Village Springs Run
Testing a Unique Real-Time, High-Precision GPS Concept for Test & Training Range Applications Thomas J. Macdonald MacroVision, Reading, Massachusetts
 Testing a Unique Real-Time, High-Precision GPS Concept for Test & Training Range Applications Thomas J. Macdonald MacroVision, Reading, Massachusetts The Central Test & Evaluation Investment Program (CTEIP)
Testing a Unique Real-Time, High-Precision GPS Concept for Test & Training Range Applications Thomas J. Macdonald MacroVision, Reading, Massachusetts The Central Test & Evaluation Investment Program (CTEIP)
Electronic Warfare Training in the Pacific Northwest
 Electronic Warfare Training in the Pacific Northwest Mission of the U.S. Navy To maintain, train and equip combat-ready naval forces capable of winning wars, deterring aggression and maintaining freedom
Electronic Warfare Training in the Pacific Northwest Mission of the U.S. Navy To maintain, train and equip combat-ready naval forces capable of winning wars, deterring aggression and maintaining freedom
Automatic Dependent Surveillance -ADS-B
 ASECNA Workshop on ADS-B (Dakar, Senegal, 22 to 23 July 2014) Automatic Dependent Surveillance -ADS-B Presented by FX SALAMBANGA Regional Officer, CNS WACAF OUTLINE I Definition II Principles III Architecture
ASECNA Workshop on ADS-B (Dakar, Senegal, 22 to 23 July 2014) Automatic Dependent Surveillance -ADS-B Presented by FX SALAMBANGA Regional Officer, CNS WACAF OUTLINE I Definition II Principles III Architecture
Copyrighted Material - Taylor & Francis
 22 Traffic Alert and Collision Avoidance System II (TCAS II) Steve Henely Rockwell Collins 22. Introduction...22-22.2 Components...22-2 22.3 Surveillance...22-3 22. Protected Airspace...22-3 22. Collision
22 Traffic Alert and Collision Avoidance System II (TCAS II) Steve Henely Rockwell Collins 22. Introduction...22-22.2 Components...22-2 22.3 Surveillance...22-3 22. Protected Airspace...22-3 22. Collision
STANDARD REPORT FORMAT FOR GLOBAL POSITIONING SYSTEM (GPS) RECEIVERS AND SYSTEMS ACCURACY TESTS AND EVALUATIONS
 RECEIVERS AND SYSTEMS ACCURACY TESTS AND EVALUATIONS") IRIG STANDARD 261-00 ELECTRONIC TRAJECTORY MEASUREMENTS GROUP STANDARD REPORT FORMAT FOR GLOBAL POSITIONING SYSTEM (GPS) RECEIVERS AND SYSTEMS ACCURACY TESTS AND EVALUATIONS WHITE SANDS MISSILE RANGE KWAJALEIN
IRIG STANDARD 261-00 ELECTRONIC TRAJECTORY MEASUREMENTS GROUP STANDARD REPORT FORMAT FOR GLOBAL POSITIONING SYSTEM (GPS) RECEIVERS AND SYSTEMS ACCURACY TESTS AND EVALUATIONS WHITE SANDS MISSILE RANGE KWAJALEIN
Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model
 1 Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model {Final Version with
1 Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model {Final Version with
Integrated Navigation System
 Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Flight Testing the ARDS Service Life Extension
 46TH TEST WING Flight Testing the ARDS Service Life Extension Wayne T. Hostilo Eglin AFB FL Integrity Service Excellence Advanced Range Data System A brief history of GPS on the Test Range Challenges faced
46TH TEST WING Flight Testing the ARDS Service Life Extension Wayne T. Hostilo Eglin AFB FL Integrity Service Excellence Advanced Range Data System A brief history of GPS on the Test Range Challenges faced
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
EE Chapter 14 Communication and Navigation Systems
 EE 2145230 Chapter 14 Communication and Navigation Systems Two way radio communication with air traffic controllers and tower operators is necessary. Aviation electronics or avionics: Avionic systems cover
EE 2145230 Chapter 14 Communication and Navigation Systems Two way radio communication with air traffic controllers and tower operators is necessary. Aviation electronics or avionics: Avionic systems cover
Chapter 4 DGPS REQUIREMENTS AND EQUIPMENT SELECTION
 Chapter 4 DGPS REQUIREMENTS AND EQUIPMENT SELECTION 4.1 INTRODUCTION As discussed in the previous chapters, accurate determination of aircraft position is a strong requirement in several flight test applications
Chapter 4 DGPS REQUIREMENTS AND EQUIPMENT SELECTION 4.1 INTRODUCTION As discussed in the previous chapters, accurate determination of aircraft position is a strong requirement in several flight test applications
Silent Sentry. Lockheed Martin Mission Systems. Jonathan Baniak Dr. Gregory Baker Ann Marie Cunningham Lorraine Martin.
 Silent Sentry Passive Surveillance Lockheed Martin Mission Systems Jonathan Baniak Dr. Gregory Baker Ann Marie Cunningham Lorraine Martin June 7, 1999 6/7/99 1 Contact: Lorraine Martin Telephone: (301)
Silent Sentry Passive Surveillance Lockheed Martin Mission Systems Jonathan Baniak Dr. Gregory Baker Ann Marie Cunningham Lorraine Martin June 7, 1999 6/7/99 1 Contact: Lorraine Martin Telephone: (301)
ACAS Xu UAS Detect and Avoid Solution
 ACAS Xu UAS Detect and Avoid Solution Wes Olson 8 December, 2016 Sponsor: Neal Suchy, TCAS Program Manager, AJM-233 DISTRIBUTION STATEMENT A. Approved for public release: distribution unlimited. Legal
ACAS Xu UAS Detect and Avoid Solution Wes Olson 8 December, 2016 Sponsor: Neal Suchy, TCAS Program Manager, AJM-233 DISTRIBUTION STATEMENT A. Approved for public release: distribution unlimited. Legal
PHINS, An All-In-One Sensor for DP Applications
 DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
GPS TSPI for Ultra High Dynamics. Use of GPS L1/L2/L5 Signals for TSPI UNCLASSIFIED. ITEA Test Instrumentation Workshop, May 15 th 18 th 2012
 GPS TSPI for Ultra High Dynamics Use of GPS L1/L2/L5 Signals for TSPI ITEA Test Instrumentation Workshop, May 15 th 18 th 2012 For further information please contact Tony Pratt: Alex Macaulay: Nick Cooper:
GPS TSPI for Ultra High Dynamics Use of GPS L1/L2/L5 Signals for TSPI ITEA Test Instrumentation Workshop, May 15 th 18 th 2012 For further information please contact Tony Pratt: Alex Macaulay: Nick Cooper:
Frequency Synchronization in Global Satellite Communications Systems
 IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 51, NO. 3, MARCH 2003 359 Frequency Synchronization in Global Satellite Communications Systems Qingchong Liu, Member, IEEE Abstract A frequency synchronization
IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 51, NO. 3, MARCH 2003 359 Frequency Synchronization in Global Satellite Communications Systems Qingchong Liu, Member, IEEE Abstract A frequency synchronization
Worst-Case GPS Constellation for Testing Navigation at Geosynchronous Orbit for GOES-R
 Worst-Case GPS Constellation for Testing Navigation at Geosynchronous Orbit for GOES-R Kristin Larson, Dave Gaylor, and Stephen Winkler Emergent Space Technologies and Lockheed Martin Space Systems 36
Worst-Case GPS Constellation for Testing Navigation at Geosynchronous Orbit for GOES-R Kristin Larson, Dave Gaylor, and Stephen Winkler Emergent Space Technologies and Lockheed Martin Space Systems 36
REAL-TIME GPS ATTITUDE DETERMINATION SYSTEM BASED ON EPOCH-BY-EPOCH TECHNOLOGY
 REAL-TIME GPS ATTITUDE DETERMINATION SYSTEM BASED ON EPOCH-BY-EPOCH TECHNOLOGY Dr. Yehuda Bock 1, Thomas J. Macdonald 2, John H. Merts 3, William H. Spires III 3, Dr. Lydia Bock 1, Dr. Jeffrey A. Fayman
REAL-TIME GPS ATTITUDE DETERMINATION SYSTEM BASED ON EPOCH-BY-EPOCH TECHNOLOGY Dr. Yehuda Bock 1, Thomas J. Macdonald 2, John H. Merts 3, William H. Spires III 3, Dr. Lydia Bock 1, Dr. Jeffrey A. Fayman
THE NASA/JPL AIRBORNE SYNTHETIC APERTURE RADAR SYSTEM. Yunling Lou, Yunjin Kim, and Jakob van Zyl
 THE NASA/JPL AIRBORNE SYNTHETIC APERTURE RADAR SYSTEM Yunling Lou, Yunjin Kim, and Jakob van Zyl Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove Drive, MS 300-243 Pasadena,
THE NASA/JPL AIRBORNE SYNTHETIC APERTURE RADAR SYSTEM Yunling Lou, Yunjin Kim, and Jakob van Zyl Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove Drive, MS 300-243 Pasadena,
Miniaturized GPS Antenna Array Technology and Predicted Anti-Jam Performance
 Miniaturized GPS Antenna Array Technology and Predicted Anti-Jam Performance Dale Reynolds; Alison Brown NAVSYS Corporation. Al Reynolds, Boeing Military Aircraft And Missile Systems Group ABSTRACT NAVSYS
Miniaturized GPS Antenna Array Technology and Predicted Anti-Jam Performance Dale Reynolds; Alison Brown NAVSYS Corporation. Al Reynolds, Boeing Military Aircraft And Missile Systems Group ABSTRACT NAVSYS
HALS-H1 Ground Surveillance & Targeting Helicopter
 ARATOS-SWISS Homeland Security AG & SMA PROGRESS, LLC HALS-H1 Ground Surveillance & Targeting Helicopter Defense, Emergency, Homeland Security (Border Patrol, Pipeline Monitoring)... Automatic detection
ARATOS-SWISS Homeland Security AG & SMA PROGRESS, LLC HALS-H1 Ground Surveillance & Targeting Helicopter Defense, Emergency, Homeland Security (Border Patrol, Pipeline Monitoring)... Automatic detection
39N6E KASTA-2E2 Low-Altitude 3D All-Round Surveillance Radar
 39N6E KASTA-2E2 Low-Altitude 3D All-Round Surveillance Radar The Kasta-2E2 low-altitude 3D all-round surveillance radar is designed to control airspace and to perform automatic detection, range/azimuth/altitude
39N6E KASTA-2E2 Low-Altitude 3D All-Round Surveillance Radar The Kasta-2E2 low-altitude 3D all-round surveillance radar is designed to control airspace and to perform automatic detection, range/azimuth/altitude
TECHNOLOGY COMMONALITY FOR SIMULATION TRAINING OF AIR COMBAT OFFICERS AND NAVAL HELICOPTER CONTROL OFFICERS
 TECHNOLOGY COMMONALITY FOR SIMULATION TRAINING OF AIR COMBAT OFFICERS AND NAVAL HELICOPTER CONTROL OFFICERS Peter Freed Managing Director, Cirrus Real Time Processing Systems Pty Ltd ( Cirrus ). Email:
TECHNOLOGY COMMONALITY FOR SIMULATION TRAINING OF AIR COMBAT OFFICERS AND NAVAL HELICOPTER CONTROL OFFICERS Peter Freed Managing Director, Cirrus Real Time Processing Systems Pty Ltd ( Cirrus ). Email:
C-Band Transmitter Experimental (CTrEX) Test at White Sands Missile Range (WSMR)
 Test at White Sands Missile Range (WSMR)") C-Band Transmitter Experimental (CTrEX) Test at White Sands Missile Range (WSMR) Item Type text; Proceedings Authors Nevarez, Jesus; Dannhaus, Joshua Publisher International Foundation for Telemetering
C-Band Transmitter Experimental (CTrEX) Test at White Sands Missile Range (WSMR) Item Type text; Proceedings Authors Nevarez, Jesus; Dannhaus, Joshua Publisher International Foundation for Telemetering
ACCURACIES OF VARIOUS GPS ANTENNAS UNDER FORESTED CONDITIONS
 ACCURACIES OF VARIOUS GPS ANTENNAS UNDER FORESTED CONDITIONS Brian H. Holley and Michael D. Yawn LandMark Systems, 122 Byrd Way Warner Robins, GA 31088 ABSTRACT GPS accuracy is much more variable in forested
ACCURACIES OF VARIOUS GPS ANTENNAS UNDER FORESTED CONDITIONS Brian H. Holley and Michael D. Yawn LandMark Systems, 122 Byrd Way Warner Robins, GA 31088 ABSTRACT GPS accuracy is much more variable in forested
Mitigate Effects of Multipath Interference at GPS Using Separate Antennas
 Mitigate Effects of Multipath Interference at GPS Using Separate Antennas Younis H. Karim AlJewari #1, R. Badlishah Ahmed *2, Ali Amer Ahmed #3 # School of Computer and Communication Engineering, Universiti
Mitigate Effects of Multipath Interference at GPS Using Separate Antennas Younis H. Karim AlJewari #1, R. Badlishah Ahmed *2, Ali Amer Ahmed #3 # School of Computer and Communication Engineering, Universiti
What is it? History. Other systems. How does it work? Trilateration GEOG 201 4/28/2010. Instructor: Pesses 1. {06} The Global Positioning System
 What is it? {06} The Global Positioning System G.P.S. = Global Positioning System Different from G.I.S. (Geographic Information Systems) Map Interpretation & GPS Spring 2010 M. Pesses History Conceived
What is it? {06} The Global Positioning System G.P.S. = Global Positioning System Different from G.I.S. (Geographic Information Systems) Map Interpretation & GPS Spring 2010 M. Pesses History Conceived
GEO 428: DEMs from GPS, Imagery, & Lidar Tuesday, September 11
 GEO 428: DEMs from GPS, Imagery, & Lidar Tuesday, September 11 Global Positioning Systems GPS is a technology that provides Location coordinates Elevation For any location with a decent view of the sky
GEO 428: DEMs from GPS, Imagery, & Lidar Tuesday, September 11 Global Positioning Systems GPS is a technology that provides Location coordinates Elevation For any location with a decent view of the sky
Chapter 6 GPS Relative Positioning Determination Concepts
 Chapter 6 GPS Relative Positioning Determination Concepts 6-1. General Absolute positioning, as discussed earlier, will not provide the accuracies needed for most USACE control projects due to existing
Chapter 6 GPS Relative Positioning Determination Concepts 6-1. General Absolute positioning, as discussed earlier, will not provide the accuracies needed for most USACE control projects due to existing
THE PERFORMANCE EVALUATION OF AN OFDM-BASED IP TRANSCEIVER AT EGLIN AFB
 THE PERFORMANCE EVALUATION OF AN OFDM-BASED IP TRANSCEIVER AT EGLIN AFB Alfredo Berard, Chief Scientist 46 TSS Eglin AFB, FL USA Paul Cook, Director of RF Products Teletronics Technology Corporation Newtown,
THE PERFORMANCE EVALUATION OF AN OFDM-BASED IP TRANSCEIVER AT EGLIN AFB Alfredo Berard, Chief Scientist 46 TSS Eglin AFB, FL USA Paul Cook, Director of RF Products Teletronics Technology Corporation Newtown,
White Sands Missile Range Modernization
 White Sands Missile Range Modernization Item Type text; Proceedings Authors Boone, Billy B. Publisher International Foundation for Telemetering Journal International Telemetering Conference Proceedings
White Sands Missile Range Modernization Item Type text; Proceedings Authors Boone, Billy B. Publisher International Foundation for Telemetering Journal International Telemetering Conference Proceedings
The GLOBAL POSITIONING SYSTEM James R. Clynch February 2006
 The GLOBAL POSITIONING SYSTEM James R. Clynch February 2006 I. Introduction What is GPS The Global Positioning System, or GPS, is a satellite based navigation system developed by the United States Defense
The GLOBAL POSITIONING SYSTEM James R. Clynch February 2006 I. Introduction What is GPS The Global Positioning System, or GPS, is a satellite based navigation system developed by the United States Defense
OughtToPilot. Project Report of Submission PC128 to 2008 Propeller Design Contest. Jason Edelberg
 OughtToPilot Project Report of Submission PC128 to 2008 Propeller Design Contest Jason Edelberg Table of Contents Project Number.. 3 Project Description.. 4 Schematic 5 Source Code. Attached Separately
OughtToPilot Project Report of Submission PC128 to 2008 Propeller Design Contest Jason Edelberg Table of Contents Project Number.. 3 Project Description.. 4 Schematic 5 Source Code. Attached Separately
Helicopter Aerial Laser Ranging
 Helicopter Aerial Laser Ranging Håkan Sterner TopEye AB P.O.Box 1017, SE-551 11 Jönköping, Sweden 1 Introduction Measuring distances with light has been used for terrestrial surveys since the fifties.
Helicopter Aerial Laser Ranging Håkan Sterner TopEye AB P.O.Box 1017, SE-551 11 Jönköping, Sweden 1 Introduction Measuring distances with light has been used for terrestrial surveys since the fifties.
MINIMIZING SELECTIVE AVAILABILITY ERROR ON TOPEX GPS MEASUREMENTS. S. C. Wu*, W. I. Bertiger and J. T. Wu
 MINIMIZING SELECTIVE AVAILABILITY ERROR ON TOPEX GPS MEASUREMENTS S. C. Wu*, W. I. Bertiger and J. T. Wu Jet Propulsion Laboratory California Institute of Technology Pasadena, California 9119 Abstract*
MINIMIZING SELECTIVE AVAILABILITY ERROR ON TOPEX GPS MEASUREMENTS S. C. Wu*, W. I. Bertiger and J. T. Wu Jet Propulsion Laboratory California Institute of Technology Pasadena, California 9119 Abstract*
Technology of Precise Orbit Determination
 Technology of Precise Orbit Determination V Seiji Katagiri V Yousuke Yamamoto (Manuscript received March 19, 2008) Since 1971, most domestic orbit determination systems have been developed by Fujitsu and
Technology of Precise Orbit Determination V Seiji Katagiri V Yousuke Yamamoto (Manuscript received March 19, 2008) Since 1971, most domestic orbit determination systems have been developed by Fujitsu and
A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology
 A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology Tatyana Bourke, Applanix Corporation Abstract This paper describes a post-processing software package that
A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology Tatyana Bourke, Applanix Corporation Abstract This paper describes a post-processing software package that
GLOBAL POSITIONING SYSTEM SHIPBORNE REFERENCE SYSTEM
 GLOBAL POSITIONING SYSTEM SHIPBORNE REFERENCE SYSTEM James R. Clynch Department of Oceanography Naval Postgraduate School Monterey, CA 93943 phone: (408) 656-3268, voice-mail: (408) 656-2712, e-mail: clynch@nps.navy.mil
GLOBAL POSITIONING SYSTEM SHIPBORNE REFERENCE SYSTEM James R. Clynch Department of Oceanography Naval Postgraduate School Monterey, CA 93943 phone: (408) 656-3268, voice-mail: (408) 656-2712, e-mail: clynch@nps.navy.mil
Wide Area Wireless Networked Navigators
 Wide Area Wireless Networked Navigators Dr. Norman Coleman, Ken Lam, George Papanagopoulos, Ketula Patel, and Ricky May US Army Armament Research, Development and Engineering Center Picatinny Arsenal,
Wide Area Wireless Networked Navigators Dr. Norman Coleman, Ken Lam, George Papanagopoulos, Ketula Patel, and Ricky May US Army Armament Research, Development and Engineering Center Picatinny Arsenal,
2. Radar receives and processes this request, and forwards it to Ground Datalink Processor (in our case named GRATIS)
") 1 Short Description The Traffic Information Service (TIS) provides information to the cockpit via data link that is similar to VFR radar traffic advisories normally received over voice radio. TIS is intended
1 Short Description The Traffic Information Service (TIS) provides information to the cockpit via data link that is similar to VFR radar traffic advisories normally received over voice radio. TIS is intended
GNSS Spectrum Issues and New GPS L5
 Federal Aviation Administration Washington, D.C. GNSS Spectrum Issues and New GPS L5 International Civil Aviation Organization Regional Coordination Meeting Lima, Peru March 27 28, 2001 Basic GPS System!Space
Federal Aviation Administration Washington, D.C. GNSS Spectrum Issues and New GPS L5 International Civil Aviation Organization Regional Coordination Meeting Lima, Peru March 27 28, 2001 Basic GPS System!Space
FLY EYE RADAR MINE DETECTION GROUND PENETRATING RADAR ON TETHERED DRONE PASSIVE RADAR FOR SMALL UAS PASSIVE SMALL PROJECTILE TRACKING RADAR
 PASSIVE RADAR FOR SMALL UAS PLANAR MONOLITHICS INDUSTRIES, INC. East Coast: 7311F GROVE ROAD, FREDERICK, MD 21704 USA PHONE: 301-662-5019 FAX: 301-662-2029 West Coast: 4921 ROBERT J. MATHEWS PARKWAY, SUITE
PASSIVE RADAR FOR SMALL UAS PLANAR MONOLITHICS INDUSTRIES, INC. East Coast: 7311F GROVE ROAD, FREDERICK, MD 21704 USA PHONE: 301-662-5019 FAX: 301-662-2029 West Coast: 4921 ROBERT J. MATHEWS PARKWAY, SUITE
Inertial Doppler Radio Locator (IDRL) for DoD Test Range Applications
 for DoD Test Range Applications") INNOVATIONS IN ENGINEERING Inertial Doppler Radio Locator (IDRL) for DoD Test Range Applications This project is funded by the Test Resource Management Center (TRMC) Test and Evaluation/Science and Technology
INNOVATIONS IN ENGINEERING Inertial Doppler Radio Locator (IDRL) for DoD Test Range Applications This project is funded by the Test Resource Management Center (TRMC) Test and Evaluation/Science and Technology
CubeSat Integration into the Space Situational Awareness Architecture
 CubeSat Integration into the Space Situational Awareness Architecture Keith Morris, Chris Rice, Mark Wolfson Lockheed Martin Space Systems Company 12257 S. Wadsworth Blvd. Mailstop S6040 Littleton, CO
CubeSat Integration into the Space Situational Awareness Architecture Keith Morris, Chris Rice, Mark Wolfson Lockheed Martin Space Systems Company 12257 S. Wadsworth Blvd. Mailstop S6040 Littleton, CO
DESIGN AND USE OF MODERN OPTIMAL RATIO COMBINERS
 DESIGN AND USE OF MODERN OPTIMAL RATIO COMBINERS William M. Lennox Microdyne Corporation 491 Oak Road, Ocala, FL 34472 ABSTRACT This paper will discuss the design and use of Optimal Ratio Combiners in
DESIGN AND USE OF MODERN OPTIMAL RATIO COMBINERS William M. Lennox Microdyne Corporation 491 Oak Road, Ocala, FL 34472 ABSTRACT This paper will discuss the design and use of Optimal Ratio Combiners in
Lecture 04. Elements of Global Positioning Systems
 Lecture 04 Elements of Global Positioning Systems Elements of GPS: During the last lecture class we talked about Global Positioning Systems and its applications. With so many innumerable applications of
Lecture 04 Elements of Global Positioning Systems Elements of GPS: During the last lecture class we talked about Global Positioning Systems and its applications. With so many innumerable applications of
A Nuclear Plume Detection and Tracking Model for the Advanced Airborne Early Warning Surveillance Aircraft
 A Nuclear Plume Detection and Tracking Model for e Advanced Airborne Early Warning Surveillance Aircraft Buddy H. Jeun *, John Younker * and Chih-Cheng Hung! * Lockheed Martin Aeronautical System Marietta,
A Nuclear Plume Detection and Tracking Model for e Advanced Airborne Early Warning Surveillance Aircraft Buddy H. Jeun *, John Younker * and Chih-Cheng Hung! * Lockheed Martin Aeronautical System Marietta,
Resection. We can measure direction in the real world! Lecture 10: Position Determination. Resection Example: Isola, Slovenia. Professor Keith Clarke
 Geography 12: Maps and Spatial Reasoning Lecture 10: Position Determination We can measure direction in the real world! Professor Keith Clarke Resection Resection Example: Isola, Slovenia Back azimuth
Geography 12: Maps and Spatial Reasoning Lecture 10: Position Determination We can measure direction in the real world! Professor Keith Clarke Resection Resection Example: Isola, Slovenia Back azimuth
NMEA2000- Par PGN. Mandatory Request, Command, or Acknowledge Group Function Receive/Transmit PGN's
 PGN Number Category Notes - Datum Local geodetic datum and datum offsets from a reference datum. T The Request / Command / Acknowledge Group type of 126208 - NMEA - Request function is defined by first
PGN Number Category Notes - Datum Local geodetic datum and datum offsets from a reference datum. T The Request / Command / Acknowledge Group type of 126208 - NMEA - Request function is defined by first
Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity
 Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity Zak M. Kassas Autonomous Systems Perception, Intelligence, and Navigation (ASPIN) Laboratory University of California, Riverside
Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity Zak M. Kassas Autonomous Systems Perception, Intelligence, and Navigation (ASPIN) Laboratory University of California, Riverside
The Next Generation of Secure Position, Navigation and Timing Technology
 Navigation and Timing Technology November 2017 Contents Executive Summary 2 GPS on the Battlefield 2 Vulnerabilities of GPS 2 Staying Ahead of the Threat 3 Innovating For More Resilient PNT 3 Innovative,
Navigation and Timing Technology November 2017 Contents Executive Summary 2 GPS on the Battlefield 2 Vulnerabilities of GPS 2 Staying Ahead of the Threat 3 Innovating For More Resilient PNT 3 Innovative,
Avionics Navigation Systems, Second Edition Myron Kayton and Walter R. Fried John Wiley & Sons, Inc (Navtech order #1014)
") Avionics Navigation Systems, Second Edition Myron Kayton and Walter R. Fried John Wiley & Sons, Inc. 1997 (Navtech order #1014) Table of Contents Preface... xvii Acknowledgments... xxi List of Contributors...1
Avionics Navigation Systems, Second Edition Myron Kayton and Walter R. Fried John Wiley & Sons, Inc. 1997 (Navtech order #1014) Table of Contents Preface... xvii Acknowledgments... xxi List of Contributors...1
Minnesat: GPS Attitude Determination Experiments Onboard a Nanosatellite
 SSC06-VII-7 : GPS Attitude Determination Experiments Onboard a Nanosatellite Vibhor L., Demoz Gebre-Egziabher, William L. Garrard, Jason J. Mintz, Jason V. Andersen, Ella S. Field, Vincent Jusuf, Abdul
SSC06-VII-7 : GPS Attitude Determination Experiments Onboard a Nanosatellite Vibhor L., Demoz Gebre-Egziabher, William L. Garrard, Jason J. Mintz, Jason V. Andersen, Ella S. Field, Vincent Jusuf, Abdul
Test and Integration of a Detect and Avoid System
 AIAA 3rd "Unmanned Unlimited" Technical Conference, Workshop and Exhibit 2-23 September 24, Chicago, Illinois AIAA 24-6424 Test and Integration of a Detect and Avoid System Mr. James Utt * Defense Research
AIAA 3rd "Unmanned Unlimited" Technical Conference, Workshop and Exhibit 2-23 September 24, Chicago, Illinois AIAA 24-6424 Test and Integration of a Detect and Avoid System Mr. James Utt * Defense Research
Orbit Determination for CE5T Based upon GPS Data
 Orbit Determination for CE5T Based upon GPS Data Cao Jianfeng (1), Tang Geshi (2), Hu Songjie (3), ZhangYu (4), and Liu Lei (5) (1) Beijing Aerospace Control Center, 26 Beiqing Road, Haidian Disrtrict,
Orbit Determination for CE5T Based upon GPS Data Cao Jianfeng (1), Tang Geshi (2), Hu Songjie (3), ZhangYu (4), and Liu Lei (5) (1) Beijing Aerospace Control Center, 26 Beiqing Road, Haidian Disrtrict,
NAVY SATELLITE COMMUNICATIONS
 NAVY SATELLITE COMMUNICATIONS Item Type text; Proceedings Authors Captain Newell, John W. Publisher International Foundation for Telemetering Journal International Telemetering Conference Proceedings Rights
NAVY SATELLITE COMMUNICATIONS Item Type text; Proceedings Authors Captain Newell, John W. Publisher International Foundation for Telemetering Journal International Telemetering Conference Proceedings Rights
AIRCRAFT AVIONIC SYSTEMS
 AIRCRAFT AVIONIC SYSTEMS B-777 cockpit Package C:\Documents and ettings\administrato Course Outline Radio wave propagation Aircraft Navigation Systems - Very High Omni-range (VOR) system - Instrument Landing
AIRCRAFT AVIONIC SYSTEMS B-777 cockpit Package C:\Documents and ettings\administrato Course Outline Radio wave propagation Aircraft Navigation Systems - Very High Omni-range (VOR) system - Instrument Landing
Vector tracking loops are a type
 GNSS Solutions: What are vector tracking loops, and what are their benefits and drawbacks? GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are
GNSS Solutions: What are vector tracking loops, and what are their benefits and drawbacks? GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are
NMEA 2000 Parameter Group Numbers and Description as of August 2007 NMEA 2000 DB Ver
 Category General & or Mandatory ISO Acknowledgment This message is provided by ISO 11783 for a handshake mechanism between transmitting and receiving devices. This message is the possible response to acknowledge
Category General & or Mandatory ISO Acknowledgment This message is provided by ISO 11783 for a handshake mechanism between transmitting and receiving devices. This message is the possible response to acknowledge
Characteristics and spectrum considerations for sense and avoid systems use on unmanned aircraft systems
 Report ITU-R M.2204 (11/2010) Characteristics and spectrum considerations for sense and avoid systems use on unmanned aircraft systems M Series Mobile, radiodetermination, amateur and related satellites
Report ITU-R M.2204 (11/2010) Characteristics and spectrum considerations for sense and avoid systems use on unmanned aircraft systems M Series Mobile, radiodetermination, amateur and related satellites
Synthetic Aperture Radar
 Synthetic Aperture Radar Picture 1: Radar silhouette of a ship, produced with the ISAR-Processor of the Ocean Master A Synthetic Aperture Radar (SAR), or SAR, is a coherent mostly airborne or spaceborne
Synthetic Aperture Radar Picture 1: Radar silhouette of a ship, produced with the ISAR-Processor of the Ocean Master A Synthetic Aperture Radar (SAR), or SAR, is a coherent mostly airborne or spaceborne
Heterogeneous Control of Small Size Unmanned Aerial Vehicles
 Magyar Kutatók 10. Nemzetközi Szimpóziuma 10 th International Symposium of Hungarian Researchers on Computational Intelligence and Informatics Heterogeneous Control of Small Size Unmanned Aerial Vehicles
Magyar Kutatók 10. Nemzetközi Szimpóziuma 10 th International Symposium of Hungarian Researchers on Computational Intelligence and Informatics Heterogeneous Control of Small Size Unmanned Aerial Vehicles
Principal Investigator Co-Principal Investigator Co-Principal Investigator Prof. Talat Ahmad Vice-Chancellor Jamia Millia Islamia Delhi
 Subject Paper No and Title Module No and Title Module Tag Geology Remote Sensing and GIS Concepts of Global Navigation Satellite RS & GIS XXXIII Principal Investigator Co-Principal Investigator Co-Principal
Subject Paper No and Title Module No and Title Module Tag Geology Remote Sensing and GIS Concepts of Global Navigation Satellite RS & GIS XXXIII Principal Investigator Co-Principal Investigator Co-Principal
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
PRINCIPLES AND FUNCTIONING OF GPS/ DGPS /ETS ER A. K. ATABUDHI, ORSAC
 PRINCIPLES AND FUNCTIONING OF GPS/ DGPS /ETS ER A. K. ATABUDHI, ORSAC GPS GPS, which stands for Global Positioning System, is the only system today able to show you your exact position on the Earth anytime,
PRINCIPLES AND FUNCTIONING OF GPS/ DGPS /ETS ER A. K. ATABUDHI, ORSAC GPS GPS, which stands for Global Positioning System, is the only system today able to show you your exact position on the Earth anytime,
GPS Technical Overview N5TWP NOV08. How Can GPS Mislead
 GPS Technical Overview How Can GPS Mislead 1 Objectives Components of GPS Satellite Acquisition Process Position Determination How can GPS Mislead 2 Components of GPS Control Segment Series of monitoring
GPS Technical Overview How Can GPS Mislead 1 Objectives Components of GPS Satellite Acquisition Process Position Determination How can GPS Mislead 2 Components of GPS Control Segment Series of monitoring
Test Solutions for Simulating Realistic GNSS Scenarios
 Test Solutions for Simulating Realistic GNSS Scenarios Author Markus Irsigler, Rohde & Schwarz GmbH & Co. KG Biography Markus Irsigler received his diploma in Geodesy and Geomatics from the University
Test Solutions for Simulating Realistic GNSS Scenarios Author Markus Irsigler, Rohde & Schwarz GmbH & Co. KG Biography Markus Irsigler received his diploma in Geodesy and Geomatics from the University
RECOMMENDATION ITU-R SA.1624 *
 Rec. ITU-R SA.1624 1 RECOMMENDATION ITU-R SA.1624 * Sharing between the Earth exploration-satellite (passive) and airborne altimeters in the aeronautical radionavigation service in the band 4 200-4 400
Rec. ITU-R SA.1624 1 RECOMMENDATION ITU-R SA.1624 * Sharing between the Earth exploration-satellite (passive) and airborne altimeters in the aeronautical radionavigation service in the band 4 200-4 400
APPENDIX C VISUAL AND NAVIGATIONAL AIDS
 VISUAL AND NAVIGATIONAL AIDS APPENDIX C VISUAL AND NAVIGATIONAL AIDS An integral part of the airport system is the visual and navigational aids provided to assist pilots in navigating both on the airfield
VISUAL AND NAVIGATIONAL AIDS APPENDIX C VISUAL AND NAVIGATIONAL AIDS An integral part of the airport system is the visual and navigational aids provided to assist pilots in navigating both on the airfield
Modification of the Entity State PDU for Use in the End-to-End Test
 Modification of the Entity State PDU for Use in the End-to-End Test MAJ Terry Schmidt, U.S. Army schmidt@jads.kirtland.af.mil (505) 846-1015 Gary Marchand, SAIC marchand@jads.kirtland.af.mil (505) 845-1165
Modification of the Entity State PDU for Use in the End-to-End Test MAJ Terry Schmidt, U.S. Army schmidt@jads.kirtland.af.mil (505) 846-1015 Gary Marchand, SAIC marchand@jads.kirtland.af.mil (505) 845-1165
Space Systems Engineering
 Space Systems Engineering This course studies the space systems engineering referring to spacecraft examples. It covers the mission analysis and design, system design approach, systems engineering process
Space Systems Engineering This course studies the space systems engineering referring to spacecraft examples. It covers the mission analysis and design, system design approach, systems engineering process
AE4-393: Avionics Exam Solutions
 AE4-393: Avionics Exam Solutions 2008-01-30 1. AVIONICS GENERAL a) WAAS: Wide Area Augmentation System: an air navigation aid developed by the Federal Aviation Administration to augment the Global Positioning
AE4-393: Avionics Exam Solutions 2008-01-30 1. AVIONICS GENERAL a) WAAS: Wide Area Augmentation System: an air navigation aid developed by the Federal Aviation Administration to augment the Global Positioning
NGA s Support for Positioning and Navigation
 NGA s Support for Positioning and Navigation PNT Symposium 6 November 2007 Barbara Wiley NATIONAL GEOSPATIAL-INTELLIGENCE AGENCY What is NGA and What Do We Do? National Geospatial-Intelligence Agency (NGA)
NGA s Support for Positioning and Navigation PNT Symposium 6 November 2007 Barbara Wiley NATIONAL GEOSPATIAL-INTELLIGENCE AGENCY What is NGA and What Do We Do? National Geospatial-Intelligence Agency (NGA)
KMD 550/850. Traffic Avoidance Function (TCAS/TAS/TIS) Pilot s Guide Addendum. Multi-Function Display. For Software Version 01/13 or later
 Pilot s Guide Addendum. Multi-Function Display. For Software Version 01/13 or later") N B KMD 550/850 Multi-Function Display Traffic Avoidance Function (TCAS/TAS/TIS) Pilot s Guide Addendum For Software Version 01/13 or later Revision 3 Jun/2004 006-18238-0000 The information contained
N B KMD 550/850 Multi-Function Display Traffic Avoidance Function (TCAS/TAS/TIS) Pilot s Guide Addendum For Software Version 01/13 or later Revision 3 Jun/2004 006-18238-0000 The information contained
GLOBAL POSITIONING SYSTEMS
 GLOBAL POSITIONING SYSTEMS GPS & GIS Fall 2017 Global Positioning Systems GPS is a general term for the navigation system consisting of 24-32 satellites orbiting the Earth, broadcasting data that allows
GLOBAL POSITIONING SYSTEMS GPS & GIS Fall 2017 Global Positioning Systems GPS is a general term for the navigation system consisting of 24-32 satellites orbiting the Earth, broadcasting data that allows
POWERGPS : A New Family of High Precision GPS Products
 POWERGPS : A New Family of High Precision GPS Products Hiroshi Okamoto and Kazunori Miyahara, Sokkia Corp. Ron Hatch and Tenny Sharpe, NAVCOM Technology Inc. BIOGRAPHY Mr. Okamoto is the Manager of Research
POWERGPS : A New Family of High Precision GPS Products Hiroshi Okamoto and Kazunori Miyahara, Sokkia Corp. Ron Hatch and Tenny Sharpe, NAVCOM Technology Inc. BIOGRAPHY Mr. Okamoto is the Manager of Research
SIMGRAPH - A FLIGHT SIMULATION DATA VISUALIZATION WORKSTATION. Joseph A. Kaplan NASA Langley Research Center Hampton, Virginia
 SIMGRAPH - A FLIGHT SIMULATION DATA VISUALIZATION WORKSTATION Joseph A. Kaplan NASA Langley Research Center Hampton, Virginia Patrick S. Kenney UNISYS Corporation Hampton, Virginia Abstract Today's modern
SIMGRAPH - A FLIGHT SIMULATION DATA VISUALIZATION WORKSTATION Joseph A. Kaplan NASA Langley Research Center Hampton, Virginia Patrick S. Kenney UNISYS Corporation Hampton, Virginia Abstract Today's modern
NO IEEEYL)C AD- A ELECTE UNCLASSIFIED. TECOM Project No. 7-CO-M92-AVD-004 METHODOLOGY INVESTIGATION FINAL REPORT
C AD- A ELECTE UNCLASSIFIED. TECOM Project No. 7-CO-M92-AVD-004 METHODOLOGY INVESTIGATION FINAL REPORT") AD- A26 1 054 UNCLASSIFIED AD No. TECOM Project No. 7-CO-M92-AVD-004 METHODOLOGY INVESTIGATION FINAL REPORT GLOBAL POSITIONING SYSTEM INTEGRATION LARRY K. MARTIN DATA SERVICES BRANCH TECHNICAL TEST SUPPORT
AD- A26 1 054 UNCLASSIFIED AD No. TECOM Project No. 7-CO-M92-AVD-004 METHODOLOGY INVESTIGATION FINAL REPORT GLOBAL POSITIONING SYSTEM INTEGRATION LARRY K. MARTIN DATA SERVICES BRANCH TECHNICAL TEST SUPPORT
The MARS Helicopter and Lessons for SATCOM Testing
 The MARS Helicopter and Lessons for SATCOM Testing Innovation: Kratos Defense Byline NASA engineers dreamed up an ingenious solution to this problem: pair the rover with a flying scout that can peer over
The MARS Helicopter and Lessons for SATCOM Testing Innovation: Kratos Defense Byline NASA engineers dreamed up an ingenious solution to this problem: pair the rover with a flying scout that can peer over
Using Unmanned Aircraft Systems for Communications Support
 A NPSTC Public Safety Communications Report Using Unmanned Aircraft Systems for Communications Support NPSTC Technology and Broadband Committee Unmanned Aircraft Systems and Robotics Working Group National
A NPSTC Public Safety Communications Report Using Unmanned Aircraft Systems for Communications Support NPSTC Technology and Broadband Committee Unmanned Aircraft Systems and Robotics Working Group National
FieldGenius Technical Notes GPS Terminology
 FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
APPENDIX H IMAGERY INTELLIGENCE SUPPORT TO LOW-INTENSITY CONFLICT
 APPENDIX H IMAGERY INTELLIGENCE SUPPORT TO LOW-INTENSITY CONFLICT This appendix providcs information that intelligence personnel must consider if imagery intelligence is to be used advantageously in LIC.
APPENDIX H IMAGERY INTELLIGENCE SUPPORT TO LOW-INTENSITY CONFLICT This appendix providcs information that intelligence personnel must consider if imagery intelligence is to be used advantageously in LIC.
Passive Radars as Sources of Information for Air Defence Systems
 Passive Radars as Sources of Information for Air Defence Systems Wiesław Klembowski *, Adam Kawalec **, Waldemar Wizner *Saab Technologies Poland, Ostrobramska 101, 04 041 Warszawa, POLAND wieslaw.klembowski@saabgroup.com
Passive Radars as Sources of Information for Air Defence Systems Wiesław Klembowski *, Adam Kawalec **, Waldemar Wizner *Saab Technologies Poland, Ostrobramska 101, 04 041 Warszawa, POLAND wieslaw.klembowski@saabgroup.com
Part One: Presented by Matranga, North, & Ottinger Part Two: Backup for discussions and archival.
 2/24/2008 1 Go For Lunar Landing Conference, March 4-5, 2008, Tempe, AZ This Presentation is a collaboration of the following Apollo team members (Panel #1): Dean Grimm, NASA MSC LLRV/LLTV Program Manager
2/24/2008 1 Go For Lunar Landing Conference, March 4-5, 2008, Tempe, AZ This Presentation is a collaboration of the following Apollo team members (Panel #1): Dean Grimm, NASA MSC LLRV/LLTV Program Manager
Carrier Phase DGPS for Autonomous Airborne Refueling
 Carrier Phase DGPS for Autonomous Airborne Refueling Samer Khanafseh and Boris Pervan, Illinois Institute of Technology, Chicago, IL Glenn Colby, Naval Air Warfare Center, Patuxent River, MD ABSTRACT For
Carrier Phase DGPS for Autonomous Airborne Refueling Samer Khanafseh and Boris Pervan, Illinois Institute of Technology, Chicago, IL Glenn Colby, Naval Air Warfare Center, Patuxent River, MD ABSTRACT For
NET SENTRIC SURVEILLANCE BAA Questions and Answers 2 April 2007
 NET SENTRIC SURVEILLANCE Questions and Answers 2 April 2007 Question #1: Should we consider only active RF sensing (radar) or also passive (for detection/localization of RF sources, or using transmitters
NET SENTRIC SURVEILLANCE Questions and Answers 2 April 2007 Question #1: Should we consider only active RF sensing (radar) or also passive (for detection/localization of RF sources, or using transmitters
Cloak Blade: Inherently Stealthy Micro-Copter
 Cloak Blade: Inherently Stealthy Micro-Copter Presented to: RADM T. B. Kraft, Commander, Navy Warfare Development Command Thomas A. Hawkins, Program Manager / PI James D. Reeves, Lead Network Engineer
Cloak Blade: Inherently Stealthy Micro-Copter Presented to: RADM T. B. Kraft, Commander, Navy Warfare Development Command Thomas A. Hawkins, Program Manager / PI James D. Reeves, Lead Network Engineer
Cloak Blade: Inherently Stealthy Micro-Copter
 Cloak Blade: Inherently Stealthy Micro-Copter Presented to: RADM T. B. Kraft, Commander, Navy Warfare Development Command Thomas A. Hawkins, Program Manager / PI James D. Reeves, Lead Network Engineer
Cloak Blade: Inherently Stealthy Micro-Copter Presented to: RADM T. B. Kraft, Commander, Navy Warfare Development Command Thomas A. Hawkins, Program Manager / PI James D. Reeves, Lead Network Engineer
AN/ALE-55 Fiber-Optic Towed Decoy ELECTRONIC SYSTEMS
 AN/ALE-55 Fiber-Optic Towed Decoy ELECTRONIC SYSTEMS 1 Benefits Reliable protection against advanced RF threats High-power coherent jamming Rapid launch Stable flight across wide speed and altitude variations
AN/ALE-55 Fiber-Optic Towed Decoy ELECTRONIC SYSTEMS 1 Benefits Reliable protection against advanced RF threats High-power coherent jamming Rapid launch Stable flight across wide speed and altitude variations
The Army s Future Tactical UAS Technology Demonstrator Program
 The Army s Future Tactical UAS Technology Demonstrator Program This information product has been reviewed and approved for public release, distribution A (Unlimited). Review completed by the AMRDEC Public
The Army s Future Tactical UAS Technology Demonstrator Program This information product has been reviewed and approved for public release, distribution A (Unlimited). Review completed by the AMRDEC Public
Progress Update. RT Logic, Steve Williams. Operations Symposium & Exhibition 20 October, 2010
 Testing the Test Range without Flights Progress Update RT Logic, Steve Williams 48 th Annual Targets, UAVs and Range Operations Symposium & Exhibition 20 October, 2010 Colorado Springs, CO (719) 598-2801
Testing the Test Range without Flights Progress Update RT Logic, Steve Williams 48 th Annual Targets, UAVs and Range Operations Symposium & Exhibition 20 October, 2010 Colorado Springs, CO (719) 598-2801
TWO-WAY TIME TRANSFER TO AIRBORNE PLATFORMS USING COMMERCIAL SATELLITE MODEMS
 TWO-WAY TIME TRANSFER TO AIRBORNE PLATFORMS USING COMMERCIAL SATELLITE MODEMS Tom Celano and Jeremy Warriner, Timing Solutions Corporation 5335 Sterling Drive, Suite B Boulder, CO 80301, USA Tel: 303-939-8481;
TWO-WAY TIME TRANSFER TO AIRBORNE PLATFORMS USING COMMERCIAL SATELLITE MODEMS Tom Celano and Jeremy Warriner, Timing Solutions Corporation 5335 Sterling Drive, Suite B Boulder, CO 80301, USA Tel: 303-939-8481;
RDT&E BUDGET ITEM JUSTIFICATION SHEET (R-2 Exhibit)
") , R-1 #49 COST (In Millions) FY 2000 FY2001 FY2002 FY2003 FY2004 FY2005 FY2006 FY2007 Cost To Complete Total Cost Total Program Element (PE) Cost 21.845 27.937 41.497 31.896 45.700 57.500 60.200 72.600
, R-1 #49 COST (In Millions) FY 2000 FY2001 FY2002 FY2003 FY2004 FY2005 FY2006 FY2007 Cost To Complete Total Cost Total Program Element (PE) Cost 21.845 27.937 41.497 31.896 45.700 57.500 60.200 72.600
400/500 Series GTS 8XX Interface. Pilot s Guide Addendum
 400/500 Series GTS 8XX Interface Pilot s Guide Addendum Copyright 2010 Garmin Ltd. or its subsidiaries. All rights reserved. This manual reflects the operation of Software version 5.03 or later for 4XX
400/500 Series GTS 8XX Interface Pilot s Guide Addendum Copyright 2010 Garmin Ltd. or its subsidiaries. All rights reserved. This manual reflects the operation of Software version 5.03 or later for 4XX
THE DEVELOPMENT OF A LOW-COST NAVIGATION SYSTEM USING GPS/RDS TECHNOLOGY
 ICAS 2 CONGRESS THE DEVELOPMENT OF A LOW-COST NAVIGATION SYSTEM USING /RDS TECHNOLOGY Yung-Ren Lin, Wen-Chi Lu, Ming-Hao Yang and Fei-Bin Hsiao Institute of Aeronautics and Astronautics, National Cheng
ICAS 2 CONGRESS THE DEVELOPMENT OF A LOW-COST NAVIGATION SYSTEM USING /RDS TECHNOLOGY Yung-Ren Lin, Wen-Chi Lu, Ming-Hao Yang and Fei-Bin Hsiao Institute of Aeronautics and Astronautics, National Cheng
SPAN Technology System Characteristics and Performance
 SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output