Modular snake robots
|
|
|
- Elinor Brooks
- 6 years ago
- Views:
Transcription


 National")

")
1 Modular snake robots Dr. Juan González Gómez System engineering and automation department Robotics Lab Carlos III University of Madrid (Spain) National Robotics & Intelligent Systems Center King Abdulaziz City for Science and Technology (KACST) Riyadh, Saudi Arabia. March-4th
2 Modular snake robots Agenda 1. Introduction 2. Modules 3. Locomotion in 1D 4. Locomotion in 2D 5. Conclusions National Robotics & Intelligent Systems Center King Abdulaziz City for Science and Technology (KACST) Riyadh, Saudi Arabia. March-4th

3 Modular robots One module, multiple configurations 3

4 Modular robots: advantages Versatility Lower cost Rapid prototiping Fault tolerance New capabilities Self-reconfiguration Self-repair Self-duplication 4


5 New capabilities Building solid object! (RoomBot, Arredondo et al.) Bioinspired Robotics Lab at EPFL Modular flying robots (Distributed flight array, Oung et al.) ETH Zurich Modular robotic furnitures, capable of moving :-) 5




6 Morphology 1D topology 2D topology 3D topology Snake robots Pitch-pitch Yaw-yaw Pitch-yaw 6


7 Controller Unit in charge of moving the joints for achieving the robot locomotion Bio-inspired Classic Mathematical models Inverse kinematics Depend on the morphology Nature imitation Central pattern generators (CPG) CPG CPG CPG 7

8 Controller for snake robots Replace the CPGs by sinusoidal oscillators CPG CPG CPG Sinusoidal oscillators: i t = Ai sin 2 t i Oi T Advantages: Very few resources are needed for their implementation 8
9 Modular snake robots Agenda 1. Introduction 2. Modules 3. Locomotion in 1D 4. Locomotion in 2D 5. Conclusions National Robotics & Intelligent Systems Center King Abdulaziz City for Science and Technology (KACST) Riyadh, Saudi Arabia. March-4th



10 Y1 modules family One degree of freedom Easy to build Servo: Futaba 3003 Size: 52x52x72mm Open source Y1 Repy1 Types of connection MY1 10
 Material: ABS")
 11")
11 REPY-1: 3D printables Printables on an Open source 3d printers (Reprap) Material: ABS plastic (the same material than Lego) rough Print time: 1h 30 min (45 min each part) 11

12 MY1 modules Material: Aluminium 2mm wide Consist of three screwed parts Designed mainly for Educational purposes 12


13 Unimod Module capable of oscillating autonomously 1D topology robots are built from them 13


14 Module oscillation Demo t = A sin Benging angle 2 T Sinusoidal oscillator Parameters: Amplitude: A Period: T 14

15 Oscillation of two modules 1 t = A sin 2 0 T 2 t = A sin Demo 2 0 T New parameter: Phase difference: It determines how a module oscillates in relation to other 15
16 Modular snake robots Agenda 1. Introduction 2. Modules 3. Locomotion in 1D 4. Locomotion in 2D 5. Conclusions National Robotics & Intelligent Systems Center King Abdulaziz City for Science and Technology (KACST) Riyadh, Saudi Arabia. March-4th

17 Control model 17
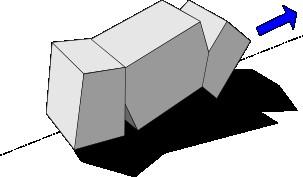
18 Minicube-I robot Demo Video Minimal configuration Minimal modular robot capable of moving straight 18
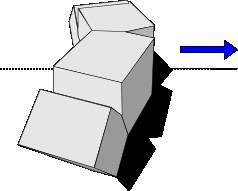
19 Cube3 Morphology: 3 pitch modules Controller: 3 equal oscillators Demo 19

20 Cube 6 Morphology: 6 pitch modules Controller: 6 equal oscillators Demo 20


21 Cube 8 Video 21


22 CUBE 12 Built by the students Consist of 4 Cube3 independents robots No communication between the segments 22


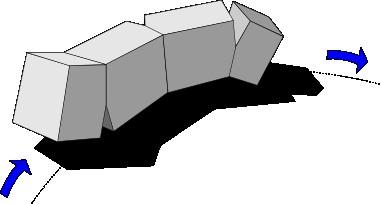
23 CUBE 18 Video Spanish record 18 módulos Length: 1.5 m Date: 22/July/

24 CUBE modules Length: 2.5 m Date: 07/March/2011 European record 24
25 Modular snake robots Agenda 1. Introduction 2. Modules 3. Locomotion in 1D 4. Locomotion in 2D 5. Conclusions National Robotics & Intelligent Systems Center King Abdulaziz City for Science and Technology (KACST) Riyadh, Saudi Arabia. March-4th


26 Control model 26

27 Minicube-II Robot Demo Minimal configuration Minimal robot capable of reaching any point in a plane with any orientation 27





28 Locomotion gaits Straight Av =40, Ah=0 v =120 Sideways Av = Ah 40 vh =90, v=0 Av = Ah 60 turning Rotating Av =40, Ah=0 Oh =30, v =120 Rolling Av =10, Ah=40 vh =90, v=180 vh =90, v=0 28

29 Cube 6-2D Demo 29


30 Cube 8-2D Video Spanish record 30








31 Locomotion gaits Sidewinding Straight Rotating v 0, k v =k h, vh=90 k h=1 v =40, k v =2 h =0 Rolling Turning v 0, k v=2k h, vh =0 v 0, vh =90 v =40, k v =3 h 0 31
32 Modular snake robots Agenda 1. Introduction 2. Modules 3. Locomotion in 1D 4. Locomotion in 2D 5. Conclusions National Robotics & Intelligent Systems Center King Abdulaziz City for Science and Technology (KACST) Riyadh, Saudi Arabia. March-4th


33 Conclusions The controller based on sinusoidal generators is valid for the locomotion of 1D topology modular robots Very few computational resources required Very smooth and natural movements Minimal configurations of 2 and 3 modules i t =Ai sin 2 i Oi T 33
: Locomotion, climbing and grasping")
34 Future work Snake robots for urban search and rescue operations: Capabilities needed (at least): Locomotion, climbing and grasping 34
")

35 Future work (II) Modular grasping: 35
36 Modular snake robots Dr. Juan González Gómez System engineering and automation department Robotics Lab Carlos III University of Madrid (Spain) National Robotics & Intelligent Systems Center King Abdulaziz City for Science and Technology (KACST) Riyadh, Saudi Arabia. March-4th
An Introduction To Modular Robots
 An Introduction To Modular Robots Introduction Morphology and Classification Locomotion Applications Challenges 11/24/09 Sebastian Rockel Introduction Definition (Robot) A robot is an artificial, intelligent,
An Introduction To Modular Robots Introduction Morphology and Classification Locomotion Applications Challenges 11/24/09 Sebastian Rockel Introduction Definition (Robot) A robot is an artificial, intelligent,
Praktikum: 9 Introduction to modular robots and first try
 18.272 Praktikum: 9 Introduction to modular robots and first try Lecturers Houxiang Zhang Manfred Grove TAMS, Department of Informatics, Germany @Tams/hzhang Institute TAMS s http://tams-www.informatik.uni-hamburg.de/hzhang
18.272 Praktikum: 9 Introduction to modular robots and first try Lecturers Houxiang Zhang Manfred Grove TAMS, Department of Informatics, Germany @Tams/hzhang Institute TAMS s http://tams-www.informatik.uni-hamburg.de/hzhang
Praktikum: 10 Single module control
 18.272 Praktikum: 10 Single module control Lecturers Houxiang Zhang Manfred Grove TAMS, Department of Informatics, Germany @Tams/hzhang Institute TAMS s http://tams-www.informatik.uni-hamburg.de/hzhang
18.272 Praktikum: 10 Single module control Lecturers Houxiang Zhang Manfred Grove TAMS, Department of Informatics, Germany @Tams/hzhang Institute TAMS s http://tams-www.informatik.uni-hamburg.de/hzhang
Embedded Intelligent Capability of a Modular Robotic System
 Embedded Intelligent Capability of a Modular Robotic System H. X. Zhang, Member, IEEE, J. Gonzalez-Gomez, S.Y. Chen, J. W. Zhang, Member, IEEE Abstract The last few years have witnessed an increasing interest
Embedded Intelligent Capability of a Modular Robotic System H. X. Zhang, Member, IEEE, J. Gonzalez-Gomez, S.Y. Chen, J. W. Zhang, Member, IEEE Abstract The last few years have witnessed an increasing interest
A Novel Modular Climbing Caterpillar Using Low-frequency Vibrating Passive Suckers
 A Novel Modular Climbing Caterpillar Using Low-frequency Vibrating Passive Suckers H. X. Zhang, Member, IEEE, J. González-Gómez, S.Y. Chen, Member, IEEE, W. Wang, R. Liu, D. Li, J. W. Zhang Abstract This
A Novel Modular Climbing Caterpillar Using Low-frequency Vibrating Passive Suckers H. X. Zhang, Member, IEEE, J. González-Gómez, S.Y. Chen, Member, IEEE, W. Wang, R. Liu, D. Li, J. W. Zhang Abstract This
Review of Modular Self-Reconfigurable Robotic Systems Di Bao1, 2, a, Xueqian Wang1, 2, b, Hailin Huang1, 2, c, Bin Liang1, 2, 3, d, *
 2nd Workshop on Advanced Research and Technology in Industry Applications (WARTIA 2016) Review of Modular Self-Reconfigurable Robotic Systems Di Bao1, 2, a, Xueqian Wang1, 2, b, Hailin Huang1, 2, c, Bin
2nd Workshop on Advanced Research and Technology in Industry Applications (WARTIA 2016) Review of Modular Self-Reconfigurable Robotic Systems Di Bao1, 2, a, Xueqian Wang1, 2, b, Hailin Huang1, 2, c, Bin
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Reinforcement Learning Approach to Generate Goal-directed Locomotion of a Snake-Like Robot with Screw-Drive Units
 Reinforcement Learning Approach to Generate Goal-directed Locomotion of a Snake-Like Robot with Screw-Drive Units Sromona Chatterjee, Timo Nachstedt, Florentin Wörgötter, Minija Tamosiunaite, Poramate
Reinforcement Learning Approach to Generate Goal-directed Locomotion of a Snake-Like Robot with Screw-Drive Units Sromona Chatterjee, Timo Nachstedt, Florentin Wörgötter, Minija Tamosiunaite, Poramate
Wang Nan, Pang Bo and Zhou Sha-Sha College of Mechanical and Electrical Engineering, Hebei University of Engineering, Hebei, Handan, , China
 Research Journal of Applied Sciences, Engineering and Technology 7(1): 37-41, 214 DOI:1.1926/rjaset.7.217 ISSN: 24-7459; e-issn: 24-7467 214 Maxwell Scientific Publication Corp. Submitted: January 25,
Research Journal of Applied Sciences, Engineering and Technology 7(1): 37-41, 214 DOI:1.1926/rjaset.7.217 ISSN: 24-7459; e-issn: 24-7467 214 Maxwell Scientific Publication Corp. Submitted: January 25,
EFFECT OF INERTIAL TAIL ON YAW RATE OF 45 GRAM LEGGED ROBOT *
 EFFECT OF INERTIAL TAIL ON YAW RATE OF 45 GRAM LEGGED ROBOT * N.J. KOHUT, D. W. HALDANE Department of Mechanical Engineering, University of California, Berkeley Berkeley, CA 94709, USA D. ZARROUK, R.S.
EFFECT OF INERTIAL TAIL ON YAW RATE OF 45 GRAM LEGGED ROBOT * N.J. KOHUT, D. W. HALDANE Department of Mechanical Engineering, University of California, Berkeley Berkeley, CA 94709, USA D. ZARROUK, R.S.
Design of Neural Circuit for Sidewinding of Snake-like Robots
 Design of Neural Circuit for Sidewinding of Snake-like obots Guoyuan i, Houxiang Zhang, Wei i and Hans Petter Hildre Faculty of Maritime Technology and Operations Aalesund University College Postboks 1517,
Design of Neural Circuit for Sidewinding of Snake-like obots Guoyuan i, Houxiang Zhang, Wei i and Hans Petter Hildre Faculty of Maritime Technology and Operations Aalesund University College Postboks 1517,
Concept Design and Simulation of a Water Proofing Modular Robot for Amphibious Locomotion
 Concept Design and Simulation of a Water Proofing Modular Robot for Amphibious Locomotion Guoyuan Li, Rodrigo Urbina, and Houxiang Zhang * Department of Ocean Operations and Civil Engineering Faculty of
Concept Design and Simulation of a Water Proofing Modular Robot for Amphibious Locomotion Guoyuan Li, Rodrigo Urbina, and Houxiang Zhang * Department of Ocean Operations and Civil Engineering Faculty of
Robo-Erectus Jr-2013 KidSize Team Description Paper.
 Robo-Erectus Jr-2013 KidSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon and Changjiu Zhou. Advanced Robotics and Intelligent Control Centre, Singapore Polytechnic, 500 Dover Road, 139651,
Robo-Erectus Jr-2013 KidSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon and Changjiu Zhou. Advanced Robotics and Intelligent Control Centre, Singapore Polytechnic, 500 Dover Road, 139651,
Figure 1. Overall Picture
 Jormungand, an Autonomous Robotic Snake Charles W. Eno, Dr. A. Antonio Arroyo Machine Intelligence Laboratory University of Florida Department of Electrical Engineering 1. Introduction In the Intelligent
Jormungand, an Autonomous Robotic Snake Charles W. Eno, Dr. A. Antonio Arroyo Machine Intelligence Laboratory University of Florida Department of Electrical Engineering 1. Introduction In the Intelligent
THE IMPORTANCE OF PLANNING AND DRAWING IN DESIGN
 PROGRAM OF STUDY ENGR.ROB Standard 1 Essential UNDERSTAND THE IMPORTANCE OF PLANNING AND DRAWING IN DESIGN The student will understand and implement the use of hand sketches and computer-aided drawing
PROGRAM OF STUDY ENGR.ROB Standard 1 Essential UNDERSTAND THE IMPORTANCE OF PLANNING AND DRAWING IN DESIGN The student will understand and implement the use of hand sketches and computer-aided drawing
Towards Artificial ATRON Animals: Scalable Anatomy for Self-Reconfigurable Robots
 Towards Artificial ATRON Animals: Scalable Anatomy for Self-Reconfigurable Robots David J. Christensen, David Brandt & Kasper Støy Robotics: Science & Systems Workshop on Self-Reconfigurable Modular Robots
Towards Artificial ATRON Animals: Scalable Anatomy for Self-Reconfigurable Robots David J. Christensen, David Brandt & Kasper Støy Robotics: Science & Systems Workshop on Self-Reconfigurable Modular Robots
FUZZY BASED SELF-TRANSFORMING ROBOT
 FUZZY BASED SELF-TRANSFORMING ROBOT K. Radha and K. Valarmathi Department of Electronics and Communication Engineering, P.S.R. Engineering College, Sivakasi, Tamilnadu, India E-Mail: radhak1992@gmail.com
FUZZY BASED SELF-TRANSFORMING ROBOT K. Radha and K. Valarmathi Department of Electronics and Communication Engineering, P.S.R. Engineering College, Sivakasi, Tamilnadu, India E-Mail: radhak1992@gmail.com
JEPPIAAR ENGINEERING COLLEGE
 JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
Evolutionary robotics Jørgen Nordmoen
 INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
Distributed Online Learning of Central Pattern Generators in Modular Robots
 Distributed Online Learning of Central Pattern Generators in Modular Robots David Johan Christensen 1, Alexander Spröwitz 2, and Auke Jan Ijspeert 2 1 The Maersk Mc-Kinney Moller Institute, University
Distributed Online Learning of Central Pattern Generators in Modular Robots David Johan Christensen 1, Alexander Spröwitz 2, and Auke Jan Ijspeert 2 1 The Maersk Mc-Kinney Moller Institute, University
Experimentation for Modular Robot Simulation by Python Coding to Establish Multiple Configurations
 Experimentation for Modular Robot Simulation by Python Coding to Establish Multiple Configurations Muhammad Haziq Hasbulah 1, Fairul Azni Jafar 2, Mohd. Hisham Nordin 3, Kazutaka Yokota 4 1, 2, 3 Faculty
Experimentation for Modular Robot Simulation by Python Coding to Establish Multiple Configurations Muhammad Haziq Hasbulah 1, Fairul Azni Jafar 2, Mohd. Hisham Nordin 3, Kazutaka Yokota 4 1, 2, 3 Faculty
The Mathematics of the Stewart Platform
 The Mathematics of the Stewart Platform The Stewart Platform consists of 2 rigid frames connected by 6 variable length legs. The Base is considered to be the reference frame work, with orthogonal axes
The Mathematics of the Stewart Platform The Stewart Platform consists of 2 rigid frames connected by 6 variable length legs. The Base is considered to be the reference frame work, with orthogonal axes
CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25)
") CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25) Dr. Cengiz Günay, Emory Univ. Günay Robotics I Autonomous Robots (Ch. 25) Spring 2013 1 / 15 Robots As Killers? The word robot coined
CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25) Dr. Cengiz Günay, Emory Univ. Günay Robotics I Autonomous Robots (Ch. 25) Spring 2013 1 / 15 Robots As Killers? The word robot coined
sin( x m cos( The position of the mass point D is specified by a set of state variables, (θ roll, θ pitch, r) related to the Cartesian coordinates by:
 related to the Cartesian coordinates by:") Research Article International Journal of Current Engineering and Technology ISSN 77-46 3 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Modeling improvement of a Humanoid
Research Article International Journal of Current Engineering and Technology ISSN 77-46 3 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Modeling improvement of a Humanoid
Development of Running Robot Based on Charge Coupled Device
 Development of Running Robot Based on Charge Coupled Device Hongzhang He School of Mechanics, North China Electric Power University, Baoding071003, China. hhzh_ncepu@163.com Abstract Robot technology is
Development of Running Robot Based on Charge Coupled Device Hongzhang He School of Mechanics, North China Electric Power University, Baoding071003, China. hhzh_ncepu@163.com Abstract Robot technology is
CS 599: Distributed Intelligence in Robotics
 CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
DEVELOPMENT OF A HUMANOID ROBOT FOR EDUCATION AND OUTREACH. K. Kelly, D. B. MacManus, C. McGinn
 DEVELOPMENT OF A HUMANOID ROBOT FOR EDUCATION AND OUTREACH K. Kelly, D. B. MacManus, C. McGinn Department of Mechanical and Manufacturing Engineering, Trinity College, Dublin 2, Ireland. ABSTRACT Robots
DEVELOPMENT OF A HUMANOID ROBOT FOR EDUCATION AND OUTREACH K. Kelly, D. B. MacManus, C. McGinn Department of Mechanical and Manufacturing Engineering, Trinity College, Dublin 2, Ireland. ABSTRACT Robots
A Semi-Minimalistic Approach to Humanoid Design
 International Journal of Scientific and Research Publications, Volume 2, Issue 4, April 2012 1 A Semi-Minimalistic Approach to Humanoid Design Hari Krishnan R., Vallikannu A.L. Department of Electronics
International Journal of Scientific and Research Publications, Volume 2, Issue 4, April 2012 1 A Semi-Minimalistic Approach to Humanoid Design Hari Krishnan R., Vallikannu A.L. Department of Electronics
RoboCup TDP Team ZSTT
 RoboCup 2018 - TDP Team ZSTT Jaesik Jeong 1, Jeehyun Yang 1, Yougsup Oh 2, Hyunah Kim 2, Amirali Setaieshi 3, Sourosh Sedeghnejad 3, and Jacky Baltes 1 1 Educational Robotics Centre, National Taiwan Noremal
RoboCup 2018 - TDP Team ZSTT Jaesik Jeong 1, Jeehyun Yang 1, Yougsup Oh 2, Hyunah Kim 2, Amirali Setaieshi 3, Sourosh Sedeghnejad 3, and Jacky Baltes 1 1 Educational Robotics Centre, National Taiwan Noremal
ABSTRACT 1. INTRODUCTION 2. RELATED WORK
 Bio-inspired locomotion for a modular snake robot Shubo Zhang and Yi Guo Dept. of Electrical and Computer Engineering, Stevens Institute of Technology, Castle Point on Hudson, Hoboken NJ US 7-991 BSTRCT
Bio-inspired locomotion for a modular snake robot Shubo Zhang and Yi Guo Dept. of Electrical and Computer Engineering, Stevens Institute of Technology, Castle Point on Hudson, Hoboken NJ US 7-991 BSTRCT
Rapid & Low-Cost Real World Deployment Of Snake-Like Modular Robots Using Fused Deposition Modeling And Evolutionary Robotics
 INTERNATIONAL JOURNAL OF TECHNOLOGY ENHANCEMENTS AND EMERGING ENGINEERING RESEARCH, VOL 3, ISSUE 07 53 Rapid & Low-Cost Real World Deployment Of Snake-Like Modular Robots Using Fused Deposition Modeling
INTERNATIONAL JOURNAL OF TECHNOLOGY ENHANCEMENTS AND EMERGING ENGINEERING RESEARCH, VOL 3, ISSUE 07 53 Rapid & Low-Cost Real World Deployment Of Snake-Like Modular Robots Using Fused Deposition Modeling
Robo-Erectus Tr-2010 TeenSize Team Description Paper.
 Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
EVALUATING THE DYNAMICS OF HEXAPOD TYPE ROBOT
 EVALUATING THE DYNAMICS OF HEXAPOD TYPE ROBOT Engr. Muhammad Asif Khan Engr. Zeeshan Asim Asghar Muhammad Hussain Iftekharuddin H. Farooqui Kamran Mumtaz Department of Electronic Engineering, Sir Syed
EVALUATING THE DYNAMICS OF HEXAPOD TYPE ROBOT Engr. Muhammad Asif Khan Engr. Zeeshan Asim Asghar Muhammad Hussain Iftekharuddin H. Farooqui Kamran Mumtaz Department of Electronic Engineering, Sir Syed
DICOM Correction Item
 DICOM Correction Item Correction Number CP- 617 Log Summary: Type of Modification Addition Name of Standard PS 3.3 2006 Rationale for Correction: The motion of modern patient support devices is no longer
DICOM Correction Item Correction Number CP- 617 Log Summary: Type of Modification Addition Name of Standard PS 3.3 2006 Rationale for Correction: The motion of modern patient support devices is no longer
A STUDY ON HEXAPOD ROBOTS AND MODELING BY MEANS OF CAD TECHNIQUES
 A STUDY ON HEXAPOD ROBOTS AND MODELING BY MEANS OF CAD TECHNIQUES Thiago Augusto Ferreira, thiago_ferreir@ufrj.br Universidade Federal do Rio de Janeiro, Polytechnic School, Mechanical Engineering Department,
A STUDY ON HEXAPOD ROBOTS AND MODELING BY MEANS OF CAD TECHNIQUES Thiago Augusto Ferreira, thiago_ferreir@ufrj.br Universidade Federal do Rio de Janeiro, Polytechnic School, Mechanical Engineering Department,
The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm
 The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm Kent Yoshikawa*, Yuichiro Tanaka**, Mitsushige Oda***, Hiroki Nakanishi**** *Tokyo Institute of Technology,
The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm Kent Yoshikawa*, Yuichiro Tanaka**, Mitsushige Oda***, Hiroki Nakanishi**** *Tokyo Institute of Technology,
Algoritmy pre AI robotiku. Pavel Petrovič, miestnosť i24a
 Algoritmy pre AI robotiku Pavel Petrovič, miestnosť i24a ppetrovic@acm.org Podmienky absolvovania Fungujúci projekt (50%) 5-stranová esej (20%) Testík (30%) Stretnutia: Prednášky... slajdy, poznámky, literatúra
Algoritmy pre AI robotiku Pavel Petrovič, miestnosť i24a ppetrovic@acm.org Podmienky absolvovania Fungujúci projekt (50%) 5-stranová esej (20%) Testík (30%) Stretnutia: Prednášky... slajdy, poznámky, literatúra
Small Unmanned Aerial Vehicle Simulation Research
 International Conference on Education, Management and Computer Science (ICEMC 2016) Small Unmanned Aerial Vehicle Simulation Research Shaojia Ju1, a and Min Ji1, b 1 Xijing University, Shaanxi Xi'an, 710123,
International Conference on Education, Management and Computer Science (ICEMC 2016) Small Unmanned Aerial Vehicle Simulation Research Shaojia Ju1, a and Min Ji1, b 1 Xijing University, Shaanxi Xi'an, 710123,
Fundamentals of Robotics
 Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2017 205 - ESEIAAT - Terrassa School of Industrial, Aerospace and Audiovisual Engineering 707 - ESAII - Department of Automatic Control
Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2017 205 - ESEIAAT - Terrassa School of Industrial, Aerospace and Audiovisual Engineering 707 - ESAII - Department of Automatic Control
Reconnectable Joints for Self-Reconfigurable Robots
 Reconnectable Joints for Self-Reconfigurable Robots Behrokh Khoshnevis*, Robert Kovac, Wei-Min Shen, Peter Will Information Sciences Institute 4676 Admiralty Way, Marina del Rey, CA 90292 Department of
Reconnectable Joints for Self-Reconfigurable Robots Behrokh Khoshnevis*, Robert Kovac, Wei-Min Shen, Peter Will Information Sciences Institute 4676 Admiralty Way, Marina del Rey, CA 90292 Department of
Autonomous Cooperative Robots for Space Structure Assembly and Maintenance
 Proceeding of the 7 th International Symposium on Artificial Intelligence, Robotics and Automation in Space: i-sairas 2003, NARA, Japan, May 19-23, 2003 Autonomous Cooperative Robots for Space Structure
Proceeding of the 7 th International Symposium on Artificial Intelligence, Robotics and Automation in Space: i-sairas 2003, NARA, Japan, May 19-23, 2003 Autonomous Cooperative Robots for Space Structure
Stabilize humanoid robot teleoperated by a RGB-D sensor
 Stabilize humanoid robot teleoperated by a RGB-D sensor Andrea Bisson, Andrea Busatto, Stefano Michieletto, and Emanuele Menegatti Intelligent Autonomous Systems Lab (IAS-Lab) Department of Information
Stabilize humanoid robot teleoperated by a RGB-D sensor Andrea Bisson, Andrea Busatto, Stefano Michieletto, and Emanuele Menegatti Intelligent Autonomous Systems Lab (IAS-Lab) Department of Information
Korea Humanoid Robot Projects
 Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
Is not 'natural' i.e. has been artificially created. Has some degree of intelligence or ability to make choices based on the
 1. INTRODUCTION 1.1 ROBOTS A robot is a mechanical or virtual, artificial agent. It is usually an electromechanical system, which, by its appearance or movements, conveys a sense that it has intent or
1. INTRODUCTION 1.1 ROBOTS A robot is a mechanical or virtual, artificial agent. It is usually an electromechanical system, which, by its appearance or movements, conveys a sense that it has intent or
MASTER SHIFU. STUDENT NAME: Vikramadityan. M ROBOT NAME: Master Shifu COURSE NAME: Intelligent Machine Design Lab
 MASTER SHIFU STUDENT NAME: Vikramadityan. M ROBOT NAME: Master Shifu COURSE NAME: Intelligent Machine Design Lab COURSE NUMBER: EEL 5666C TA: Andy Gray, Nick Cox INSTRUCTORS: Dr. A. Antonio Arroyo, Dr.
MASTER SHIFU STUDENT NAME: Vikramadityan. M ROBOT NAME: Master Shifu COURSE NAME: Intelligent Machine Design Lab COURSE NUMBER: EEL 5666C TA: Andy Gray, Nick Cox INSTRUCTORS: Dr. A. Antonio Arroyo, Dr.
4D-Particle filter localization for a simulated UAV
 4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
Predictive Gaze Stabilization During Periodic Locomotion Based On Adaptive Frequency Oscillators
 IEEE International Conference on Robotics and Automation RiverCentre, Saint Paul, Minnesota, USA May 4-8, Predictive Gaze Stabilization During Periodic Locomotion Based On Adaptive Frequency Oscillators
IEEE International Conference on Robotics and Automation RiverCentre, Saint Paul, Minnesota, USA May 4-8, Predictive Gaze Stabilization During Periodic Locomotion Based On Adaptive Frequency Oscillators
Stress and Strain Analysis in Critical Joints of the Bearing Parts of the Mobile Platform Using Tensometry
 American Journal of Mechanical Engineering, 2016, Vol. 4, No. 7, 394-399 Available online at http://pubs.sciepub.com/ajme/4/7/30 Science and Education Publishing DOI:10.12691/ajme-4-7-30 Stress and Strain
American Journal of Mechanical Engineering, 2016, Vol. 4, No. 7, 394-399 Available online at http://pubs.sciepub.com/ajme/4/7/30 Science and Education Publishing DOI:10.12691/ajme-4-7-30 Stress and Strain
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
Mechatronics Project Report
 Mechatronics Project Report Introduction Robotic fish are utilized in the Dynamic Systems Laboratory in order to study and model schooling in fish populations, with the goal of being able to manage aquatic
Mechatronics Project Report Introduction Robotic fish are utilized in the Dynamic Systems Laboratory in order to study and model schooling in fish populations, with the goal of being able to manage aquatic
ZJUDancer Team Description Paper
 ZJUDancer Team Description Paper Tang Qing, Xiong Rong, Li Shen, Zhan Jianbo, and Feng Hao State Key Lab. of Industrial Technology, Zhejiang University, Hangzhou, China Abstract. This document describes
ZJUDancer Team Description Paper Tang Qing, Xiong Rong, Li Shen, Zhan Jianbo, and Feng Hao State Key Lab. of Industrial Technology, Zhejiang University, Hangzhou, China Abstract. This document describes
Self-reconfigurable Quadruped Robot: Design and Analysis Yang Zheng1, a, Zhiqin Qian* 1, b, Pingsheng Ma1, c and Tan Zhang2, d
 2nd Workshop on Advanced Research and Technology in Industry Applications (WARTIA 2016) Self-reconfigurable Quadruped Robot: Design and Analysis Yang Zheng1, a, Zhiqin Qian* 1, b, Pingsheng Ma1, c and
2nd Workshop on Advanced Research and Technology in Industry Applications (WARTIA 2016) Self-reconfigurable Quadruped Robot: Design and Analysis Yang Zheng1, a, Zhiqin Qian* 1, b, Pingsheng Ma1, c and
The Evolution of Machine Tools
 The Evolution of Machine Tools ETSU ENTC 3020 Technology & Society Earliest Tools Primitive Hand tools Weapons & Tools Mineral, Bone, & Wood Stabbing, Cutting, Scraping, & Drilling Early Tools Wheel Efficient
The Evolution of Machine Tools ETSU ENTC 3020 Technology & Society Earliest Tools Primitive Hand tools Weapons & Tools Mineral, Bone, & Wood Stabbing, Cutting, Scraping, & Drilling Early Tools Wheel Efficient
Legged Capsule Robots In Medicine
 Legged Capsule Robots In Medicine Intelligent Robotics Seminar, Group TAMS, University of Hamburg Atefeh Mousavi 18/01/2016 1 Outline Motivation Medical Consideration 12-legged capsule robot and The spiral
Legged Capsule Robots In Medicine Intelligent Robotics Seminar, Group TAMS, University of Hamburg Atefeh Mousavi 18/01/2016 1 Outline Motivation Medical Consideration 12-legged capsule robot and The spiral
Bed must be leveled and printer adjusted to produce good single layer prints. Measurement and calibration of your filament is highly recommended.
 Printing Instructions: ABS or PET is preferred for durability. Bed must be leveled and printer adjusted to produce good single layer prints. Measurement and calibration of your filament is highly recommended.
Printing Instructions: ABS or PET is preferred for durability. Bed must be leveled and printer adjusted to produce good single layer prints. Measurement and calibration of your filament is highly recommended.
Vertebrate- or snake-like soft robot based on tensegrity principle. Présentation GT5, vendredi 28 novembre 2014
 Vertebrate- or snake-like soft robot based on tensegrity principle Présentation GT5, vendredi 28 novembre 2014 Alex Pitti, phd Maître de Conférence, chaire d'excellence UCP-CNRS Laboratoire ETIS CNRS,
Vertebrate- or snake-like soft robot based on tensegrity principle Présentation GT5, vendredi 28 novembre 2014 Alex Pitti, phd Maître de Conférence, chaire d'excellence UCP-CNRS Laboratoire ETIS CNRS,
EVOLUTIONARY ROBOTICS + 3D PRINTING = RAPID & LOW-COST DEPLOYMENT OF AUTONOMOUS MOBILE ROBOTS
 EVOLUTIONARY ROBOTICS + 3D PRINTING = RAPID & LOW-COST DEPLOYMENT OF AUTONOMOUS MOBILE ROBOTS Jason Teo 1, Shun-Hoe Lim 2, Wei-Shun Chee 2 and Kim-On Chin 1 1 Faculty of Computing & Informatics, Kota Kinabalu
EVOLUTIONARY ROBOTICS + 3D PRINTING = RAPID & LOW-COST DEPLOYMENT OF AUTONOMOUS MOBILE ROBOTS Jason Teo 1, Shun-Hoe Lim 2, Wei-Shun Chee 2 and Kim-On Chin 1 1 Faculty of Computing & Informatics, Kota Kinabalu
GLOSSARY. a * (b * c) = (a * b) * c. A property of operations. An operation * is called associative if:
 = (a * b) * c. A property of operations. An operation * is called associative if:") Associativity A property of operations. An operation * is called associative if: a * (b * c) = (a * b) * c for every possible a, b, and c. Axiom For Greek geometry, an axiom was a 'self-evident truth'.
Associativity A property of operations. An operation * is called associative if: a * (b * c) = (a * b) * c for every possible a, b, and c. Axiom For Greek geometry, an axiom was a 'self-evident truth'.
UCL Micro:bit Robotics Documentation
 UCL Micro:bit Robotics Documentation Release 0.1 Rae Harbird Sep 25, 2018 Contents 1 Building Your Own Robots 3 2 Contents 5 2.1 Micro:bit - Getting Started........................................ 5 2.2
UCL Micro:bit Robotics Documentation Release 0.1 Rae Harbird Sep 25, 2018 Contents 1 Building Your Own Robots 3 2 Contents 5 2.1 Micro:bit - Getting Started........................................ 5 2.2
The design and making of a humanoid robotic hand
 The design and making of a humanoid robotic hand presented by Tian Li Research associate Supervisor s Name: Prof. Nadia Magnenat Thalmann,Prof. Daniel Thalmann & Prof. Jianmin Zheng Project 2: Mixed Society
The design and making of a humanoid robotic hand presented by Tian Li Research associate Supervisor s Name: Prof. Nadia Magnenat Thalmann,Prof. Daniel Thalmann & Prof. Jianmin Zheng Project 2: Mixed Society
Dynamic Rolling for a Modular Loop Robot
 University of Pennsylvania ScholarlyCommons Departmental Papers (MEAM) Department of Mechanical Engineering & Applied Mechanics 7-1-2006 Dynamic Rolling for a Modular Loop Robot Jimmy Sastra University
University of Pennsylvania ScholarlyCommons Departmental Papers (MEAM) Department of Mechanical Engineering & Applied Mechanics 7-1-2006 Dynamic Rolling for a Modular Loop Robot Jimmy Sastra University
Design and Experiments of Advanced Leg Module (HRP-2L) for Humanoid Robot (HRP-2) Development
 for Humanoid Robot (HRP-2) Development") Proceedings of the 2002 IEEE/RSJ Intl. Conference on Intelligent Robots and Systems EPFL, Lausanne, Switzerland October 2002 Design and Experiments of Advanced Leg Module (HRP-2L) for Humanoid Robot (HRP-2)
Proceedings of the 2002 IEEE/RSJ Intl. Conference on Intelligent Robots and Systems EPFL, Lausanne, Switzerland October 2002 Design and Experiments of Advanced Leg Module (HRP-2L) for Humanoid Robot (HRP-2)
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Robotics Modules with Realtime Adaptive Topology
 International Journal of Computer Information Systems and Industrial Management Applications ISSN 2150-7988 Volume 3 (2011) pp.185-192 MIR Labs, www.mirlabs.net/ijcisim/index.html Robotics Modules with
International Journal of Computer Information Systems and Industrial Management Applications ISSN 2150-7988 Volume 3 (2011) pp.185-192 MIR Labs, www.mirlabs.net/ijcisim/index.html Robotics Modules with
Data Sheet. AEDT-9140 Series High Temperature 115 C Three Channel Optical Incremental Encoder Modules 100 CPR to 1000 CPR. Description.
 AEDT-9140 Series High Temperature 115 C Three Channel Optical Incremental Encoder Modules 100 CPR to 1000 CPR Data Sheet Description The AEDT-9140 series are three channel optical incremental encoder modules.
AEDT-9140 Series High Temperature 115 C Three Channel Optical Incremental Encoder Modules 100 CPR to 1000 CPR Data Sheet Description The AEDT-9140 series are three channel optical incremental encoder modules.
Modeling And Pid Cascade Control For Uav Type Quadrotor
 IOSR Journal of Dental and Medical Sciences (IOSR-JDMS) e-issn: 2279-0853, p-issn: 2279-0861.Volume 15, Issue 8 Ver. IX (August. 2016), PP 52-58 www.iosrjournals.org Modeling And Pid Cascade Control For
IOSR Journal of Dental and Medical Sciences (IOSR-JDMS) e-issn: 2279-0853, p-issn: 2279-0861.Volume 15, Issue 8 Ver. IX (August. 2016), PP 52-58 www.iosrjournals.org Modeling And Pid Cascade Control For
How the Body Shapes the Way We Think
 How the Body Shapes the Way We Think A New View of Intelligence Rolf Pfeifer and Josh Bongard with a contribution by Simon Grand Foreword by Rodney Brooks Illustrations by Shun Iwasawa A Bradford Book
How the Body Shapes the Way We Think A New View of Intelligence Rolf Pfeifer and Josh Bongard with a contribution by Simon Grand Foreword by Rodney Brooks Illustrations by Shun Iwasawa A Bradford Book
A PROTOTYPE CLIMBING ROBOT FOR INSPECTION OF COMPLEX FERROUS STRUCTURES
 A PROTOTYPE CLIMBING ROBOT FOR INSPECTION OF COMPLEX FERROUS STRUCTURES G. PETERS, D. PAGANO, D.K. LIU ARC Centre of Excellence for Autonomous Systems, University of Technology, Sydney Australia, POBox
A PROTOTYPE CLIMBING ROBOT FOR INSPECTION OF COMPLEX FERROUS STRUCTURES G. PETERS, D. PAGANO, D.K. LIU ARC Centre of Excellence for Autonomous Systems, University of Technology, Sydney Australia, POBox
On-demand printable robots
 On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
Why Humanoid Robots?*
 Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League
 Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League Chung-Hsien Kuo 1, Hung-Chyun Chou 1, Jui-Chou Chung 1, Po-Chung Chia 2, Shou-Wei Chi 1, Yu-De Lien 1 1 Department
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League Chung-Hsien Kuo 1, Hung-Chyun Chou 1, Jui-Chou Chung 1, Po-Chung Chia 2, Shou-Wei Chi 1, Yu-De Lien 1 1 Department
HeroX - Untethered VR Training in Sync'ed Physical Spaces
 Page 1 of 6 HeroX - Untethered VR Training in Sync'ed Physical Spaces Above and Beyond - Integrating Robotics In previous research work I experimented with multiple robots remotely controlled by people
Page 1 of 6 HeroX - Untethered VR Training in Sync'ed Physical Spaces Above and Beyond - Integrating Robotics In previous research work I experimented with multiple robots remotely controlled by people
Plymouth Humanoids Team Description Paper for RoboCup 2012
 Plymouth Humanoids Team Description Paper for RoboCup 2012 Peter Gibbons, Phil F. Culverhouse, Guido Bugmann, Julian Tilbury, Paul Eastham, Arron Griffiths, Clare Simpson. Centre for Robotics and Neural
Plymouth Humanoids Team Description Paper for RoboCup 2012 Peter Gibbons, Phil F. Culverhouse, Guido Bugmann, Julian Tilbury, Paul Eastham, Arron Griffiths, Clare Simpson. Centre for Robotics and Neural
Development of Control for a Serpentine Robot
 Development of Control for a Serpentine Robot William R. Hutchison, Betsy J. Constantine, Johann Borenstein, and Jerry Pratt Abstract This paper describes the development and testing of control of the
Development of Control for a Serpentine Robot William R. Hutchison, Betsy J. Constantine, Johann Borenstein, and Jerry Pratt Abstract This paper describes the development and testing of control of the
AN AUTONOMOUS APPROACH TO WHEEL CHANGING PROBLEM
 STUDIA UNIV. BABEŞ BOLYAI, INFORMATICA, Volume LV, Number 1, 2010 AN AUTONOMOUS APPROACH TO WHEEL CHANGING PROBLEM LIVIU ŞTIRB, ZSUZSANNA MARIAN, AND MIHAI OLTEAN Abstract. We describe a self-repairing
STUDIA UNIV. BABEŞ BOLYAI, INFORMATICA, Volume LV, Number 1, 2010 AN AUTONOMOUS APPROACH TO WHEEL CHANGING PROBLEM LIVIU ŞTIRB, ZSUZSANNA MARIAN, AND MIHAI OLTEAN Abstract. We describe a self-repairing
Objective Motion Cueing Test for Driving Simulators
 DLR.de Chart 1 Objective Motion Cueing Test for Driving Simulators Martin Fischer, Andreas Seefried, Carsten Seehof DLR.de Chart 2 Looking in the rear mirror Is your simulator appropriate for my research?
DLR.de Chart 1 Objective Motion Cueing Test for Driving Simulators Martin Fischer, Andreas Seefried, Carsten Seehof DLR.de Chart 2 Looking in the rear mirror Is your simulator appropriate for my research?
Intelligent Robotic Systems. What is a Robot? Is This a Robot?
 Intelligent Robotic Systems Prof. Richard Voyles Department of Electrical and Computer Engineering University of Denver ENGR 3730 What is a Robot? WWWebsters: a mechanism guided by automatic controls a
Intelligent Robotic Systems Prof. Richard Voyles Department of Electrical and Computer Engineering University of Denver ENGR 3730 What is a Robot? WWWebsters: a mechanism guided by automatic controls a
Development of a Controlling Program for Six-legged Robot by VHDL Programming
 Development of a Controlling Program for Six-legged Robot by VHDL Programming Saroj Pullteap Department of Mechanical Engineering, Faculty of Engineering and Industrial Technology Silpakorn University
Development of a Controlling Program for Six-legged Robot by VHDL Programming Saroj Pullteap Department of Mechanical Engineering, Faculty of Engineering and Industrial Technology Silpakorn University
Dr. Houxiang Zhang. Speaker. TAMS, Department of Informatics University of Hamburg, Germany. MIN- Faculty Department of Informatics
 The State of the Art Research in Robotics and Intelligent Systems at the TAMS, University of Hamburg Speaker Dr. TAMS, University of Hamburg, Germany 1 Outline of this talk TAMS introduction Short introduction
The State of the Art Research in Robotics and Intelligent Systems at the TAMS, University of Hamburg Speaker Dr. TAMS, University of Hamburg, Germany 1 Outline of this talk TAMS introduction Short introduction
Hands On Activity: Robotics in the Classroom. Using Lego Mindstorms (Prepared by Connie Gomez and Virgilio Gonzalez)
") Hands On Activity: Robotics in the Classroom Using Lego Mindstorms (Prepared by Connie Gomez and Virgilio Gonzalez) Group Discussion Your concepts of robotics? Your experiences with robots? Your experiences
Hands On Activity: Robotics in the Classroom Using Lego Mindstorms (Prepared by Connie Gomez and Virgilio Gonzalez) Group Discussion Your concepts of robotics? Your experiences with robots? Your experiences
Development of Novel Robots with Modular Methodology
 The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Development of Novel Robots with Modular Methodology Yisheng Guan, Li, Jiang, Xianmin Zhang,
The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Development of Novel Robots with Modular Methodology Yisheng Guan, Li, Jiang, Xianmin Zhang,
TECHNICAL SPECIFICATION
 TECHNICAL SPECIFICATION Bed type milling machine FS(Q) 100/125 INTELLECTUAL PROPERRY OF TOS KUŘIM - OS, a.s. page: 1 from 14 Article 1. GENERAL CHARACTERISTICS OF THE MILLING MACHINE 3 2. MACHINE DESCRIPTION
TECHNICAL SPECIFICATION Bed type milling machine FS(Q) 100/125 INTELLECTUAL PROPERRY OF TOS KUŘIM - OS, a.s. page: 1 from 14 Article 1. GENERAL CHARACTERISTICS OF THE MILLING MACHINE 3 2. MACHINE DESCRIPTION
Push Path Improvement with Policy based Reinforcement Learning
 1 Push Path Improvement with Policy based Reinforcement Learning Junhu He TAMS Department of Informatics University of Hamburg Cross-modal Interaction In Natural and Artificial Cognitive Systems (CINACS)
1 Push Path Improvement with Policy based Reinforcement Learning Junhu He TAMS Department of Informatics University of Hamburg Cross-modal Interaction In Natural and Artificial Cognitive Systems (CINACS)
Automation and Control Electrical Engineering
 Automation and Control Electrical Engineering Technical University of Denmark DTU-Building 326 DK-2800 Kgs. Lyngby Denmark aut.elektro.dtu.dk Ole Ravn Total students ~9.300 including Ph.D. 1.150 and Int.
Automation and Control Electrical Engineering Technical University of Denmark DTU-Building 326 DK-2800 Kgs. Lyngby Denmark aut.elektro.dtu.dk Ole Ravn Total students ~9.300 including Ph.D. 1.150 and Int.
Computer Vision Based Chess Playing Capabilities for the Baxter Humanoid Robot
 International Conference on Control, Robotics, and Automation 2016 Computer Vision Based Chess Playing Capabilities for the Baxter Humanoid Robot Andrew Tzer-Yeu Chen, Kevin I-Kai Wang {andrew.chen, kevin.wang}@auckland.ac.nz
International Conference on Control, Robotics, and Automation 2016 Computer Vision Based Chess Playing Capabilities for the Baxter Humanoid Robot Andrew Tzer-Yeu Chen, Kevin I-Kai Wang {andrew.chen, kevin.wang}@auckland.ac.nz
Data Sheet. AEDB-9340 Series 1250/2500 CPR Commutation Encoder Modules with Codewheel. Features. Description. Applications
 AEDB-9340 Series 1250/2500 CPR Commutation Encoder Modules with Codewheel Data Sheet Description The AEDB-9340 optical encoder series are six-channel optical incremental encoder modules with codewheel.
AEDB-9340 Series 1250/2500 CPR Commutation Encoder Modules with Codewheel Data Sheet Description The AEDB-9340 optical encoder series are six-channel optical incremental encoder modules with codewheel.
ACCELEROMETER BASED ATTITUDE ESTIMATING DEVICE
 Proceedings of the 2004/2005 Spring Multi-Disciplinary Engineering Design Conference Kate Gleason College of Engineering Rochester Institute of Technology Rochester, New York 14623 May 13, 2005 Project
Proceedings of the 2004/2005 Spring Multi-Disciplinary Engineering Design Conference Kate Gleason College of Engineering Rochester Institute of Technology Rochester, New York 14623 May 13, 2005 Project
HUMAN-LEVEL ARTIFICIAL INTELIGENCE & COGNITIVE SCIENCE
 HUMAN-LEVEL ARTIFICIAL INTELIGENCE & COGNITIVE SCIENCE Nils J. Nilsson Stanford AI Lab http://ai.stanford.edu/~nilsson Symbolic Systems 100, April 15, 2008 1 OUTLINE Computation and Intelligence Approaches
HUMAN-LEVEL ARTIFICIAL INTELIGENCE & COGNITIVE SCIENCE Nils J. Nilsson Stanford AI Lab http://ai.stanford.edu/~nilsson Symbolic Systems 100, April 15, 2008 1 OUTLINE Computation and Intelligence Approaches
Design of a Modular Self-Reconfigurable Robot
 Design of a Modular Self-Reconfigurable Robot Pakpong Jantapremjit and David Austin Robotic Systems Laboratory Department of Systems Engineering, RSISE The Australian National University, Canberra, ACT
Design of a Modular Self-Reconfigurable Robot Pakpong Jantapremjit and David Austin Robotic Systems Laboratory Department of Systems Engineering, RSISE The Australian National University, Canberra, ACT
Concept and Architecture of a Centaur Robot
 Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
Data Sheet. AEDT-9340 Series High Temperature 115 C 1250/2500 CPR 6-Channel Commutation Encoder. Description. Features.
 AEDT-9340 Series High Temperature 115 C 1250/2500 CPR 6-Channel Commutation Encoder Data Sheet Description The AEDT-9340 optical encoder series are high temperature six channel optical incremental encoder
AEDT-9340 Series High Temperature 115 C 1250/2500 CPR 6-Channel Commutation Encoder Data Sheet Description The AEDT-9340 optical encoder series are high temperature six channel optical incremental encoder
Undefined Obstacle Avoidance and Path Planning
 Paper ID #6116 Undefined Obstacle Avoidance and Path Planning Prof. Akram Hossain, Purdue University, Calumet (Tech) Akram Hossain is a professor in the department of Engineering Technology and director
Paper ID #6116 Undefined Obstacle Avoidance and Path Planning Prof. Akram Hossain, Purdue University, Calumet (Tech) Akram Hossain is a professor in the department of Engineering Technology and director
Snake Robots. From Biology - Through University - Towards Industry I. Kristin Y. Pettersen
 Snake Robots From Biology - Through University - Towards Industry I Kristin Y. Pettersen Centre for Autonomous Marine Operations and Systems (NTNU AMOS), Department of Engineering Cybernetics, Norwegian
Snake Robots From Biology - Through University - Towards Industry I Kristin Y. Pettersen Centre for Autonomous Marine Operations and Systems (NTNU AMOS), Department of Engineering Cybernetics, Norwegian
Airbus Autonomy Roadmap
 Airbus Autonomy Roadmap ERTS 2 2018 Embedded Real Time Software and Systems Toulouse January 31 February 2, 2018 Pascal Traverse, General Manager for the Autonomy Thrust Airbus Corporate Technology Office
Airbus Autonomy Roadmap ERTS 2 2018 Embedded Real Time Software and Systems Toulouse January 31 February 2, 2018 Pascal Traverse, General Manager for the Autonomy Thrust Airbus Corporate Technology Office
Development of PetRo: A Modular Robot for Pet-Like Applications
 Development of PetRo: A Modular Robot for Pet-Like Applications Ben Salem * Polywork Ltd., Sheffield Science Park, Cooper Buildings, Arundel Street, Sheffield, S1 2NS, England ABSTRACT We have designed
Development of PetRo: A Modular Robot for Pet-Like Applications Ben Salem * Polywork Ltd., Sheffield Science Park, Cooper Buildings, Arundel Street, Sheffield, S1 2NS, England ABSTRACT We have designed
A Review on Perception-driven Obstacle-aided Locomotion for Snake Robots
 A Review on Perception-driven Obstacle-aided Locomotion for Snake Robots Filippo Sanfilippo 1, Jon Azpiazu 2, Giancarlo Marafioti 2, Aksel A. Transeth 2, Øyvind Stavdahl 1 and Pål Liljebäck 1 1 Dept. of
A Review on Perception-driven Obstacle-aided Locomotion for Snake Robots Filippo Sanfilippo 1, Jon Azpiazu 2, Giancarlo Marafioti 2, Aksel A. Transeth 2, Øyvind Stavdahl 1 and Pål Liljebäck 1 1 Dept. of
GPS data correction using encoders and INS sensors
 GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
Development and Evaluation of a Centaur Robot
 Development and Evaluation of a Centaur Robot 1 Satoshi Tsuda, 1 Kuniya Shinozaki, and 2 Ryohei Nakatsu 1 Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan {amy65823,
Development and Evaluation of a Centaur Robot 1 Satoshi Tsuda, 1 Kuniya Shinozaki, and 2 Ryohei Nakatsu 1 Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan {amy65823,
Technical Cognitive Systems
 Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position