Intelligent Humanoid Robot
|
|
|
- Barbra Blake
- 6 years ago
- Views:
Transcription

1 Intelligent Humanoid Robot Prof. Mayez Al-Mouhamed , Fall Computer Engineering Department King Fahd University of Petroleum and Minerals 1
2 RoboCup : Goal By the year 2050, develop a team of fully autonomous humanoid robots that can win against the human world soccer champion team. More than 3000 researchers from about 35 countries / regions. The RoboCup Federation: a Non Profit Organization registered in Switzerland. National Committees in more than 10 countries. Supporting conferences and coordinating research with industry and related government organization. 2


3 Can we accomplish the goal? Apollo Project Dream: Send men to the moon and safely return them to the earth. Technologies: systems science, electronics, aviation, project management, etc. First Airplane and fifty years later a man landed on the moon! 3



4 Computer Chess ENIAC 1946 Deep Blue Computer Chess Dream: to develop a computer that can beat human chess champion. Technologies: Search algorithms, parallel computing, parallel compuer architectures, etc. Effects: Basic computer algorithms, parallel programming, etc
5 Discovery of DNA and 50 years later the Completion of genome analysis 5
6 What is RoboCup? RoboCup is like the Apollo Project in the 21st century. By achieving a landmark : to develop a humanoid robot team which can compete with human soccer champion team in 50 years, by the year 2050, realize a new era in which robots truly contribute to human society. 6
7 The RoboCup Federation RoboCupSoccer Simulation League (2D, 3D) Small Robot League (F-180) Middle Size Robot League (F- 2000) Sony 4-Legged Robot League Humanoid League RoboCupRescue Rescue Simulation League Rescue Robot League RoboCupJunior Soccer Rescue Dance 7
8 International project holding annual world championship to promote joint research of artificial intelligence and robotics with the subject of football by fully-autonomous robots - History of RoboCup Championships : 1st in Nagoya, Japan 1998: 2nd in Paris, France 1999: 3rd in Stockholm, Sweden 2000: 4th in Melbourne, Australia 2001: 5th in Seattle, USA 2002: 6th in Fukuoka, Japan 2003: 7th in Padua, Italy 2004: 8th in Lisbon, Portugal 2005: 9th in Osaka, Japan 2006: 10th in Bremen, Germany 8

9 Application of RoboCup technologies Disaster rescue Intelligent Traffic Systems (ITS) Deep space exploration Office robots Distributed agents RoboCup : Activities RoboCupSoccer Research project using soccer RoboCupJunior International education project using robots RoboCupRescue Disaster rescue system research 9
10 Robocup Leagues Humanoid League Official league of humanoid robots in which those can do penalty kick, walking, free performance and so on. Expected to be a core league in the near future. Small-sized League Soccer by 5 vs. 5 wheel robots within 15 cm diameter with orange golf ball in the table tennis sized court. Sony 4 legged League League utilizing 4 specially-programmed SONY AIBO Simulation League 11 virtual robots with AI program play soccer games in the field on the server. Remote participation is possible from anywhere. Middle-sized League Soccer by 4 vs. 4 wheel robots within 45 cm diameter with an orange indoor soccer ball in 9x5 m field. 10




11 Some Robocup Leagues Legged Robot League Small-sized League Middle-sized League Humanoid League 11




12 Humanoid League 1. Standing on one leg 2. Walking Walk the distance 5 times of the robot height. 3. Penalty Kick 40cm, 80cm and 120cm classes. 5 goals per team. 4. Free Style 5 minutes free demonstration 12
13 RoboCup Drives Research in Control algorithms, Machine vision, sensing and localization, Real-time distributed computing, Real-time ad hoc networking, Mechanical design, Machine learning, and Autonomous multiagent systems 13
14 Why RoboCup? A Landmark Project Challenging goal and spill-over of technolgoies Outcome-based A platform for project-oriented education in science and technology A standard problem for AI and robotics. 14
15 Why This New Course? Robocup matured experience (Germany, Japan, Iran, USA, etc.) Long: since 1996 Diversified: simulation, small-size, Sony 4-legged Hard work, frustration, fun, struggle, success A LOT learned on: Creating teams of completing intelligent robots. 15
16 Expanding the experience to highschool RoboCup phenomenon started at the primary and secondary school-age levels will prove to be of excellent educational value at the undergraduate level. Education and social aspects contests were held in a public space, students were encouraged to invite their friends to come and watch, other faculty members also came to observe Moral: he excitement of the crowd and the visibility of the event motivated students to work harder after the first (maze) contest in preparing for the second (soccer) contest. 16
17 Motivation Tournaments are being organized using the robots, and the energy, enthusiasm, and motivation displayed by students is unsurpassed. Learning Objective The ability to demonstrate theoretical models and complex algorithms with a hands-on, accessible medium, strengthens the learning experience for students RoboCup Educational Level Adv. undergraduate and early graduate courses, a repository of curricular materials, replicate and expand others efforts. Advanced Learning Tool Empirically witnessed increased excitement, interest, and motivation of the students, need to formalize these observations with a scientific study of the RoboCup learning environment. 17
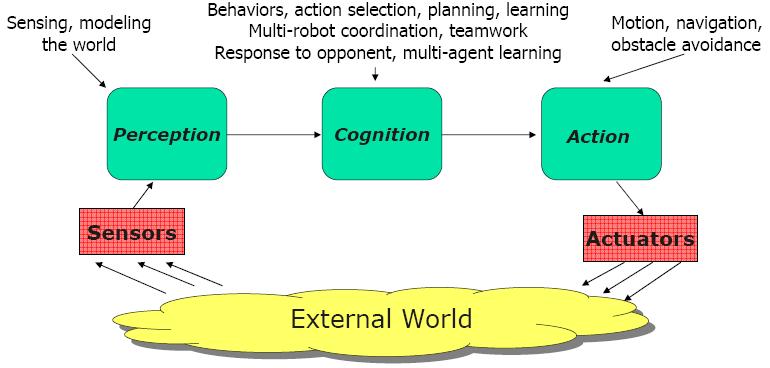
18 Autonomous Robot Perception Cognition Action Sensors Actuators External World 18
19 19
20 Autonomy I. Perception sensing, modeling of the world II. Cognition behaviors, action selection, planning, learning multi-robot coordination, teamwork response to opponent, multi-agent learning III. Action motion, navigation, obstacle avoidance 20


21 Autonomous Robots The basic software architecture 21






22 I - Action: Motion Four-legged walking Head motion Turning, kicking 22


23 The Problem of Body Movements How to walk, jump and run? How to kick and dribble? How to stand up? 23
 Indirect (given position compute angles) How can humans")
24 The Problem of Body Movements Modeling Motions Which angles are useful? Complex Calculations: Direct (given angles compute position) Indirect (given position compute angles) How can humans walk? without knowing physics and calculations? 24
 : Competing interpretations Belief_new := update (Perception, Belief_old);")
25 II - Perception: sensing for a better perception Perception by Humans (Integration) Perception by Humans (Interpretation) : Competing interpretations Belief_new := update (Perception, Belief_old); 25


26 Perception: vision Real-time and robust Effective calibration Colored blobs identified as objects Confidence computed 26




27 Robot Perception Example of image processing and features extraction of the ball: Acquire, segmentation, blob detection, and Ball extraction. 27



28 The Problem of Perception Example of image processing and features extraction of several colors: original, quantized, main colors, and recognition. 28



29 Perception := sense(sensorydata); 29
30 How to Understand the World Perception means interpretation by integration of Old perceptions Data from different sensors Objects identified from recent percepts Knowledge about the world All information is incomplete and unreliable. But: Many redundancies can be exploited using methods from statistics and constraint satisfaction. Exploiting Redundancy Where am I? Where is the ball? 30

31 Exploiting Redundancy The size of the goal defines a circle of possible positions of the observer 31


32 Exploiting Redundancy The size of the ball defines a circle of possible positions of the ball relative to the observer 32


33 Exploiting Redundancy The ball lies on a line before the penalty border line 33


34 Exploiting Redundancy The ball lies on a line between goal post and observer 34

35 Exploiting Redundancy Combination yields 2 possible positions 35

36 Exploiting Redundancy Combination yields 2 possible positions 36
37 III - Cognition: Behaviors How to Understand the World Parts of a Dialog with the ITA: Customer: Would like to travel. Next month during vacations Yes, swimming is ok. nice picture Want to see other people No, don t like such rocks. Warm water is important for my children good food Information is incomplete and unreliable. Integration from different sources is useful (sensor fusion) Understand the World How to Understand Myself (cognitive) How to use the body? How to stand up, walk, jump and run? (control) How to kick and dribble? (decision) When to perform a double pass? (cooperation) 37

38 Further Questions: How to Play Where am I? (self-localization vs landmarks) Where is the ball? (localization) Where are the others? What are they doing? What shall I do? How to Play: Belief: What is the state of the world Desires: What are my wishes Intention: Which desires will I realize Plans: How can I realize my intentions Models for beliefs, goals, intentions plans (Agent Oriented Techniques): Program structure for agents/robots Models of partners/opponents in the program Models of others: What are their beliefs/desires/intentions/plans 38

 Dribbling")
")
39 Three different situations at RoboCup (2006): (a) Dribbling challenge (b) Goalkeeper (c) Ball Search 39
40 Behaviors not see ball Recover timeout Score not see ball not see ball Search next to ball not next to ball Approach see ball 40
41 Arbiter in context environment. 41
42 The finite state machine implemented in RobotCore controlling the behavior of the soccer robot. 42

43 Programming Soccer Robots What can we learn? How to understand the world. How to realize rational behavior in the daily world. It is not really important, if robots will win in

44 Machine Learning Use trial and error. Evolutionary Algorithms Reinforcement Learning Case Based Reasoning Neural Networks Humboldt/simloid-evo.shtml?de Proprioception: Feeling the own Body 44
45 AUTONOMOUS ROBOTICS Syllabus Actuator and control Motion and Kinematics Sensing and vision Intelligent Behaviors Bahvior Programming Localization Complex behaviors Robocup simulator (project) 45
46 Resources and Readings Readings and videos are available at: The OpenR Web page has a lot of information: API for the AIBOs: 46
47 Thanks to RoboCup Federation RoboCup Teams all over the world Mr. Rida Hasanain, Mr. Salam Ahmad Rifai and all COE Robocup team Sponsors Sony, Empolis, DaimlerChrysler, PSI, WISTA, Gerry Weber, Vivico Hans-Dieter Burkhard, Humboldt-Universität zu Berlin, Institut für Informatik. Professor Peter Stone, Trustee, The RoboCup Federation, Computer Sciences, the Univ. Texas at Austin. Prof. Manuela Veloso, Computer Science Department, CMU. Dr. Thomas Röfer, Breman University, Germany. Dr. E. SKLAR, Brooklyn College, City Univ. of New York A light software architecture for a Humanoid Soccer Robot, A. Maggi et al., IAS-Lab, Dep. of Information Engineering, University of Padua, Italy 47
RoboCup. Presented by Shane Murphy April 24, 2003
 RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
The State of the Art in Robotics: RoboCup, Rescue, Entertainment, and More
 22 nd World Gas Conference Tokyo 2003 SPECIAL ADDRESS (SA-3) The State of the Art in Robotics: RoboCup, Rescue, Entertainment, and More Dr. Hiroaki Kitano Project Director, ERATO Kitano Symbiotic Systems
22 nd World Gas Conference Tokyo 2003 SPECIAL ADDRESS (SA-3) The State of the Art in Robotics: RoboCup, Rescue, Entertainment, and More Dr. Hiroaki Kitano Project Director, ERATO Kitano Symbiotic Systems
Keywords: Multi-robot adversarial environments, real-time autonomous robots
 ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
FU-Fighters. The Soccer Robots of Freie Universität Berlin. Why RoboCup? What is RoboCup?
 The Soccer Robots of Freie Universität Berlin We have been building autonomous mobile robots since 1998. Our team, composed of students and researchers from the Mathematics and Computer Science Department,
The Soccer Robots of Freie Universität Berlin We have been building autonomous mobile robots since 1998. Our team, composed of students and researchers from the Mathematics and Computer Science Department,
Hierarchical Controller for Robotic Soccer
 Hierarchical Controller for Robotic Soccer Byron Knoll Cognitive Systems 402 April 13, 2008 ABSTRACT RoboCup is an initiative aimed at advancing Artificial Intelligence (AI) and robotics research. This
Hierarchical Controller for Robotic Soccer Byron Knoll Cognitive Systems 402 April 13, 2008 ABSTRACT RoboCup is an initiative aimed at advancing Artificial Intelligence (AI) and robotics research. This
Courses on Robotics by Guest Lecturing at Balkan Countries
 Courses on Robotics by Guest Lecturing at Balkan Countries Hans-Dieter Burkhard Humboldt University Berlin With Great Thanks to all participating student teams and their institutes! 1 Courses on Balkan
Courses on Robotics by Guest Lecturing at Balkan Countries Hans-Dieter Burkhard Humboldt University Berlin With Great Thanks to all participating student teams and their institutes! 1 Courses on Balkan
CORC 3303 Exploring Robotics. Why Teams?
 Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
GermanTeam The German National RoboCup Team
 GermanTeam 2008 The German National RoboCup Team David Becker 2, Jörg Brose 2, Daniel Göhring 3, Matthias Jüngel 3, Max Risler 2, and Thomas Röfer 1 1 Deutsches Forschungszentrum für Künstliche Intelligenz,
GermanTeam 2008 The German National RoboCup Team David Becker 2, Jörg Brose 2, Daniel Göhring 3, Matthias Jüngel 3, Max Risler 2, and Thomas Röfer 1 1 Deutsches Forschungszentrum für Künstliche Intelligenz,
Content. 3 Preface 4 Who We Are 6 The RoboCup Initiative 7 Our Robots 8 Hardware 10 Software 12 Public Appearances 14 Achievements 15 Interested?
 Content 3 Preface 4 Who We Are 6 The RoboCup Initiative 7 Our Robots 8 Hardware 10 Software 12 Public Appearances 14 Achievements 15 Interested? 2 Preface Dear reader, Robots are in everyone's minds nowadays.
Content 3 Preface 4 Who We Are 6 The RoboCup Initiative 7 Our Robots 8 Hardware 10 Software 12 Public Appearances 14 Achievements 15 Interested? 2 Preface Dear reader, Robots are in everyone's minds nowadays.
RoboCup Rescue - Robot League League Talk. Johannes Pellenz RoboCup Rescue Exec
 RoboCup Rescue - Robot League League Talk Johannes Pellenz RoboCup Rescue Exec Disaster Is the building still safe? Victims? Todays tools Disaster Is the building still safe? Victims? Disaster Is the building
RoboCup Rescue - Robot League League Talk Johannes Pellenz RoboCup Rescue Exec Disaster Is the building still safe? Victims? Todays tools Disaster Is the building still safe? Victims? Disaster Is the building
Hierarchical Case-Based Reasoning Behavior Control for Humanoid Robot
 Annals of University of Craiova, Math. Comp. Sci. Ser. Volume 36(2), 2009, Pages 131 140 ISSN: 1223-6934 Hierarchical Case-Based Reasoning Behavior Control for Humanoid Robot Bassant Mohamed El-Bagoury,
Annals of University of Craiova, Math. Comp. Sci. Ser. Volume 36(2), 2009, Pages 131 140 ISSN: 1223-6934 Hierarchical Case-Based Reasoning Behavior Control for Humanoid Robot Bassant Mohamed El-Bagoury,
Learning and Using Models of Kicking Motions for Legged Robots
 Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
SPQR RoboCup 2016 Standard Platform League Qualification Report
 SPQR RoboCup 2016 Standard Platform League Qualification Report V. Suriani, F. Riccio, L. Iocchi, D. Nardi Dipartimento di Ingegneria Informatica, Automatica e Gestionale Antonio Ruberti Sapienza Università
SPQR RoboCup 2016 Standard Platform League Qualification Report V. Suriani, F. Riccio, L. Iocchi, D. Nardi Dipartimento di Ingegneria Informatica, Automatica e Gestionale Antonio Ruberti Sapienza Università
CS343 Introduction to Artificial Intelligence Spring 2012
 CS343 Introduction to Artificial Intelligence Spring 2012 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
CS343 Introduction to Artificial Intelligence Spring 2012 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
CS343 Introduction to Artificial Intelligence Spring 2010
 CS343 Introduction to Artificial Intelligence Spring 2010 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
CS343 Introduction to Artificial Intelligence Spring 2010 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
S.P.Q.R. Legged Team Report from RoboCup 2003
 S.P.Q.R. Legged Team Report from RoboCup 2003 L. Iocchi and D. Nardi Dipartimento di Informatica e Sistemistica Universitá di Roma La Sapienza Via Salaria 113-00198 Roma, Italy {iocchi,nardi}@dis.uniroma1.it,
S.P.Q.R. Legged Team Report from RoboCup 2003 L. Iocchi and D. Nardi Dipartimento di Informatica e Sistemistica Universitá di Roma La Sapienza Via Salaria 113-00198 Roma, Italy {iocchi,nardi}@dis.uniroma1.it,
A Vision Based System for Goal-Directed Obstacle Avoidance
 ROBOCUP2004 SYMPOSIUM, Instituto Superior Técnico, Lisboa, Portugal, July 4-5, 2004. A Vision Based System for Goal-Directed Obstacle Avoidance Jan Hoffmann, Matthias Jüngel, and Martin Lötzsch Institut
ROBOCUP2004 SYMPOSIUM, Instituto Superior Técnico, Lisboa, Portugal, July 4-5, 2004. A Vision Based System for Goal-Directed Obstacle Avoidance Jan Hoffmann, Matthias Jüngel, and Martin Lötzsch Institut
SPQR RoboCup 2014 Standard Platform League Team Description Paper
 SPQR RoboCup 2014 Standard Platform League Team Description Paper G. Gemignani, F. Riccio, L. Iocchi, D. Nardi Department of Computer, Control, and Management Engineering Sapienza University of Rome, Italy
SPQR RoboCup 2014 Standard Platform League Team Description Paper G. Gemignani, F. Riccio, L. Iocchi, D. Nardi Department of Computer, Control, and Management Engineering Sapienza University of Rome, Italy
RoboCup was created in 1996 by a group of Japanese,
 RoboCup Soccer Leagues Daniele Nardi, Itsuki Noda, Fernando Ribeiro, Peter Stone, Oskar von Stryk, Manuela Veloso n RoboCup was created in 1996 by a group of Japanese, American, and European artificial
RoboCup Soccer Leagues Daniele Nardi, Itsuki Noda, Fernando Ribeiro, Peter Stone, Oskar von Stryk, Manuela Veloso n RoboCup was created in 1996 by a group of Japanese, American, and European artificial
Baset Adult-Size 2016 Team Description Paper
 Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
Introduction to Multi-Agent Programming
 Introduction to Multi-Agent Programming 1. Introduction Organizational, MAS and Applications, RoboCup Alexander Kleiner, Bernhard Nebel Lecture Material Artificial Intelligence A Modern Approach, 2 nd
Introduction to Multi-Agent Programming 1. Introduction Organizational, MAS and Applications, RoboCup Alexander Kleiner, Bernhard Nebel Lecture Material Artificial Intelligence A Modern Approach, 2 nd
Using Reactive and Adaptive Behaviors to Play Soccer
 AI Magazine Volume 21 Number 3 (2000) ( AAAI) Articles Using Reactive and Adaptive Behaviors to Play Soccer Vincent Hugel, Patrick Bonnin, and Pierre Blazevic This work deals with designing simple behaviors
AI Magazine Volume 21 Number 3 (2000) ( AAAI) Articles Using Reactive and Adaptive Behaviors to Play Soccer Vincent Hugel, Patrick Bonnin, and Pierre Blazevic This work deals with designing simple behaviors
Robotic Systems ECE 401RB Fall 2007
 The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball
 Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Multi-Platform Soccer Robot Development System
 Multi-Platform Soccer Robot Development System Hui Wang, Han Wang, Chunmiao Wang, William Y. C. Soh Division of Control & Instrumentation, School of EEE Nanyang Technological University Nanyang Avenue,
Multi-Platform Soccer Robot Development System Hui Wang, Han Wang, Chunmiao Wang, William Y. C. Soh Division of Control & Instrumentation, School of EEE Nanyang Technological University Nanyang Avenue,
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future
 RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
Overview Agents, environments, typical components
 Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Task Allocation: Role Assignment. Dr. Daisy Tang
 Task Allocation: Role Assignment Dr. Daisy Tang Outline Multi-robot dynamic role assignment Task Allocation Based On Roles Usually, a task is decomposed into roleseither by a general autonomous planner,
Task Allocation: Role Assignment Dr. Daisy Tang Outline Multi-robot dynamic role assignment Task Allocation Based On Roles Usually, a task is decomposed into roleseither by a general autonomous planner,
Autonomous Robot Soccer Teams
 Soccer-playing robots could lead to completely autonomous intelligent machines. Autonomous Robot Soccer Teams Manuela Veloso Manuela Veloso is professor of computer science at Carnegie Mellon University.
Soccer-playing robots could lead to completely autonomous intelligent machines. Autonomous Robot Soccer Teams Manuela Veloso Manuela Veloso is professor of computer science at Carnegie Mellon University.
Learning and Using Models of Kicking Motions for Legged Robots
 Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
CS295-1 Final Project : AIBO
 CS295-1 Final Project : AIBO Mert Akdere, Ethan F. Leland December 20, 2005 Abstract This document is the final report for our CS295-1 Sensor Data Management Course Final Project: Project AIBO. The main
CS295-1 Final Project : AIBO Mert Akdere, Ethan F. Leland December 20, 2005 Abstract This document is the final report for our CS295-1 Sensor Data Management Course Final Project: Project AIBO. The main
CMDragons 2009 Team Description
 CMDragons 2009 Team Description Stefan Zickler, Michael Licitra, Joydeep Biswas, and Manuela Veloso Carnegie Mellon University {szickler,mmv}@cs.cmu.edu {mlicitra,joydeep}@andrew.cmu.edu Abstract. In this
CMDragons 2009 Team Description Stefan Zickler, Michael Licitra, Joydeep Biswas, and Manuela Veloso Carnegie Mellon University {szickler,mmv}@cs.cmu.edu {mlicitra,joydeep}@andrew.cmu.edu Abstract. In this
Growing up with Robots Costa MFM and Fernandes JF
 Growing up with Robots Costa MFM and Fernandes JF Introduction Piaget s theory of cognitive development [1] is considered a fundamental pedagogical tool that in different approaches, educators at different
Growing up with Robots Costa MFM and Fernandes JF Introduction Piaget s theory of cognitive development [1] is considered a fundamental pedagogical tool that in different approaches, educators at different
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
The Dutch AIBO Team 2004
 The Dutch AIBO Team 2004 Stijn Oomes 1, Pieter Jonker 2, Mannes Poel 3, Arnoud Visser 4, Marco Wiering 5 1 March 2004 1 DECIS Lab, Delft Cooperation on Intelligent Systems 2 Quantitative Imaging Group,
The Dutch AIBO Team 2004 Stijn Oomes 1, Pieter Jonker 2, Mannes Poel 3, Arnoud Visser 4, Marco Wiering 5 1 March 2004 1 DECIS Lab, Delft Cooperation on Intelligent Systems 2 Quantitative Imaging Group,
A Lego-Based Soccer-Playing Robot Competition For Teaching Design
 Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
Nao Devils Dortmund. Team Description for RoboCup Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann
 Nao Devils Dortmund Team Description for RoboCup 2014 Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann Robotics Research Institute Section Information Technology TU Dortmund University 44221 Dortmund,
Nao Devils Dortmund Team Description for RoboCup 2014 Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann Robotics Research Institute Section Information Technology TU Dortmund University 44221 Dortmund,
How Students Teach Robots to Think The Example of the Vienna Cubes a Robot Soccer Team
 How Students Teach Robots to Think The Example of the Vienna Cubes a Robot Soccer Team Robert Pucher Paul Kleinrath Alexander Hofmann Fritz Schmöllebeck Department of Electronic Abstract: Autonomous Robot
How Students Teach Robots to Think The Example of the Vienna Cubes a Robot Soccer Team Robert Pucher Paul Kleinrath Alexander Hofmann Fritz Schmöllebeck Department of Electronic Abstract: Autonomous Robot
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Chapter 31. Intelligent System Architectures
 Chapter 31. Intelligent System Architectures The Quest for Artificial Intelligence, Nilsson, N. J., 2009. Lecture Notes on Artificial Intelligence, Spring 2012 Summarized by Jang, Ha-Young and Lee, Chung-Yeon
Chapter 31. Intelligent System Architectures The Quest for Artificial Intelligence, Nilsson, N. J., 2009. Lecture Notes on Artificial Intelligence, Spring 2012 Summarized by Jang, Ha-Young and Lee, Chung-Yeon
Berlin United - NaoTH 2014
 Berlin United - NaoTH 2014 Heinrich Mellmann, Marcus Scheunemann, Hans-Dieter Burkhard, and Verena Hafner Kognitive Robotik, Institut für Informatik, Humboldt-Universität zu Berlin, Berlin, Germany http://naoth.de
Berlin United - NaoTH 2014 Heinrich Mellmann, Marcus Scheunemann, Hans-Dieter Burkhard, and Verena Hafner Kognitive Robotik, Institut für Informatik, Humboldt-Universität zu Berlin, Berlin, Germany http://naoth.de
IRH 2017 / Group 10. Hosen Gakuen High School Risu inter. Takeru Saito, Akitaka Fujii. Theme3 Most advanced technologies of robots
 IRH 2017 / Group 10 Hosen Gakuen High School Risu inter Takeru Saito, Akitaka Fujii Theme3 Most advanced technologies of robots Do you know this? Bipedal robot Double inverted pendulum model 1968 ZMP theory
IRH 2017 / Group 10 Hosen Gakuen High School Risu inter Takeru Saito, Akitaka Fujii Theme3 Most advanced technologies of robots Do you know this? Bipedal robot Double inverted pendulum model 1968 ZMP theory
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Dutch Nao Team. Team Description for Robocup Eindhoven, The Netherlands November 8, 2012
 Dutch Nao Team Team Description for Robocup 2013 - Eindhoven, The Netherlands http://www.dutchnaoteam.nl November 8, 2012 Duncan ten Velthuis, Camiel Verschoor, Auke Wiggers, Hessel van der Molen, Tijmen
Dutch Nao Team Team Description for Robocup 2013 - Eindhoven, The Netherlands http://www.dutchnaoteam.nl November 8, 2012 Duncan ten Velthuis, Camiel Verschoor, Auke Wiggers, Hessel van der Molen, Tijmen
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
ROBOTIC SOCCER: THE GATEWAY FOR POWERFUL ROBOTIC APPLICATIONS
 ROBOTIC SOCCER: THE GATEWAY FOR POWERFUL ROBOTIC APPLICATIONS Luiz A. Celiberto Junior and Jackson P. Matsuura Instituto Tecnológico de Aeronáutica (ITA) Praça Marechal Eduardo Gomes, 50, Vila das Acácias,
ROBOTIC SOCCER: THE GATEWAY FOR POWERFUL ROBOTIC APPLICATIONS Luiz A. Celiberto Junior and Jackson P. Matsuura Instituto Tecnológico de Aeronáutica (ITA) Praça Marechal Eduardo Gomes, 50, Vila das Acácias,
NTU Robot PAL 2009 Team Report
 NTU Robot PAL 2009 Team Report Chieh-Chih Wang, Shao-Chen Wang, Hsiao-Chieh Yen, and Chun-Hua Chang The Robot Perception and Learning Laboratory Department of Computer Science and Information Engineering
NTU Robot PAL 2009 Team Report Chieh-Chih Wang, Shao-Chen Wang, Hsiao-Chieh Yen, and Chun-Hua Chang The Robot Perception and Learning Laboratory Department of Computer Science and Information Engineering
Nao Devils Dortmund. Team Description for RoboCup Stefan Czarnetzki, Gregor Jochmann, and Sören Kerner
 Nao Devils Dortmund Team Description for RoboCup 21 Stefan Czarnetzki, Gregor Jochmann, and Sören Kerner Robotics Research Institute Section Information Technology TU Dortmund University 44221 Dortmund,
Nao Devils Dortmund Team Description for RoboCup 21 Stefan Czarnetzki, Gregor Jochmann, and Sören Kerner Robotics Research Institute Section Information Technology TU Dortmund University 44221 Dortmund,
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Outline. Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
 Environment types Agent types") Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Find Kick Play An Innate Behavior for the Aibo Robot
 Find Kick Play An Innate Behavior for the Aibo Robot Ioana Butoi 05 Advisors: Prof. Douglas Blank and Prof. Geoffrey Towell Bryn Mawr College, Computer Science Department Senior Thesis Spring 2005 Abstract
Find Kick Play An Innate Behavior for the Aibo Robot Ioana Butoi 05 Advisors: Prof. Douglas Blank and Prof. Geoffrey Towell Bryn Mawr College, Computer Science Department Senior Thesis Spring 2005 Abstract
NAO-Team Humboldt 2010
 NAO-Team Humboldt 2010 The RoboCup NAO Team of Humboldt-Universität zu Berlin Hans-Dieter Burkhard, Florian Holzhauer, Thomas Krause, Heinrich Mellmann, Claas Norman Ritter, Oliver Welter, and Yuan Xu
NAO-Team Humboldt 2010 The RoboCup NAO Team of Humboldt-Universität zu Berlin Hans-Dieter Burkhard, Florian Holzhauer, Thomas Krause, Heinrich Mellmann, Claas Norman Ritter, Oliver Welter, and Yuan Xu
Past Progress Brings Us Towards a Research Road Map for Further Competitions and Developments
 Past Progress Brings Us Towards a Research Road Map for Further Competitions and Developments 1998 CORBIS CORP. & COMSTOCK, INC. 1998 By HANS-DIETER BURKHARD, DOMINIQUE DUHAUT, MASAHIRO FUJITA, PEDRO LIMA,
Past Progress Brings Us Towards a Research Road Map for Further Competitions and Developments 1998 CORBIS CORP. & COMSTOCK, INC. 1998 By HANS-DIETER BURKHARD, DOMINIQUE DUHAUT, MASAHIRO FUJITA, PEDRO LIMA,
Multi Robot Localization assisted by Teammate Robots and Dynamic Objects
 Multi Robot Localization assisted by Teammate Robots and Dynamic Objects Anil Kumar Katti Department of Computer Science University of Texas at Austin akatti@cs.utexas.edu ABSTRACT This paper discusses
Multi Robot Localization assisted by Teammate Robots and Dynamic Objects Anil Kumar Katti Department of Computer Science University of Texas at Austin akatti@cs.utexas.edu ABSTRACT This paper discusses
Humanoid Robot NAO: Developing Behaviors for Football Humanoid Robots
 Humanoid Robot NAO: Developing Behaviors for Football Humanoid Robots State of the Art Presentation Luís Miranda Cruz Supervisors: Prof. Luis Paulo Reis Prof. Armando Sousa Outline 1. Context 1.1. Robocup
Humanoid Robot NAO: Developing Behaviors for Football Humanoid Robots State of the Art Presentation Luís Miranda Cruz Supervisors: Prof. Luis Paulo Reis Prof. Armando Sousa Outline 1. Context 1.1. Robocup
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS. Nuno Sousa Eugénio Oliveira
 AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
The UT Austin Villa 3D Simulation Soccer Team 2008
 UT Austin Computer Sciences Technical Report AI09-01, February 2009. The UT Austin Villa 3D Simulation Soccer Team 2008 Shivaram Kalyanakrishnan, Yinon Bentor and Peter Stone Department of Computer Sciences
UT Austin Computer Sciences Technical Report AI09-01, February 2009. The UT Austin Villa 3D Simulation Soccer Team 2008 Shivaram Kalyanakrishnan, Yinon Bentor and Peter Stone Department of Computer Sciences
EDUCATIONAL ROBOTICS' INTRODUCTORY COURSE
 AESTIT EDUCATIONAL ROBOTICS' INTRODUCTORY COURSE Manuel Filipe P. C. M. Costa University of Minho Robotics in the classroom Robotics competitions The vast majority of students learn in a concrete manner
AESTIT EDUCATIONAL ROBOTICS' INTRODUCTORY COURSE Manuel Filipe P. C. M. Costa University of Minho Robotics in the classroom Robotics competitions The vast majority of students learn in a concrete manner
COMP9414/ 9814/ 3411: Artificial Intelligence. Week 2. Classifying AI Tasks
 COMP9414/ 9814/ 3411: Artificial Intelligence Week 2. Classifying AI Tasks Russell & Norvig, Chapter 2. COMP9414/9814/3411 18s1 Tasks & Agent Types 1 Examples of AI Tasks Week 2: Wumpus World, Robocup
COMP9414/ 9814/ 3411: Artificial Intelligence Week 2. Classifying AI Tasks Russell & Norvig, Chapter 2. COMP9414/9814/3411 18s1 Tasks & Agent Types 1 Examples of AI Tasks Week 2: Wumpus World, Robocup
Representation Learning for Mobile Robots in Dynamic Environments
 Representation Learning for Mobile Robots in Dynamic Environments Olivia Michael Supervised by A/Prof. Oliver Obst Western Sydney University Vacation Research Scholarships are funded jointly by the Department
Representation Learning for Mobile Robots in Dynamic Environments Olivia Michael Supervised by A/Prof. Oliver Obst Western Sydney University Vacation Research Scholarships are funded jointly by the Department
COMP219: Artificial Intelligence. Lecture 2: AI Problems and Applications
 COMP219: Artificial Intelligence Lecture 2: AI Problems and Applications 1 Introduction Last time General module information Characterisation of AI and what it is about Today Overview of some common AI
COMP219: Artificial Intelligence Lecture 2: AI Problems and Applications 1 Introduction Last time General module information Characterisation of AI and what it is about Today Overview of some common AI
RoboCup TDP Team ZSTT
 RoboCup 2018 - TDP Team ZSTT Jaesik Jeong 1, Jeehyun Yang 1, Yougsup Oh 2, Hyunah Kim 2, Amirali Setaieshi 3, Sourosh Sedeghnejad 3, and Jacky Baltes 1 1 Educational Robotics Centre, National Taiwan Noremal
RoboCup 2018 - TDP Team ZSTT Jaesik Jeong 1, Jeehyun Yang 1, Yougsup Oh 2, Hyunah Kim 2, Amirali Setaieshi 3, Sourosh Sedeghnejad 3, and Jacky Baltes 1 1 Educational Robotics Centre, National Taiwan Noremal
Cognitive Robotics. Behavior Control. Hans-Dieter Burkhard June 2014
 Cognitive Robotics Behavior Control Hans-Dieter Burkhard June 2014 Introduction Control Architectures Aspects of Rationality BDI Architectures Behavior Based Robotics Overview Burkhard Cognitive Robotics
Cognitive Robotics Behavior Control Hans-Dieter Burkhard June 2014 Introduction Control Architectures Aspects of Rationality BDI Architectures Behavior Based Robotics Overview Burkhard Cognitive Robotics
Artificial Intelligence: Definition
 Lecture Notes Artificial Intelligence: Definition Dae-Won Kim School of Computer Science & Engineering Chung-Ang University What are AI Systems? Deep Blue defeated the world chess champion Garry Kasparov
Lecture Notes Artificial Intelligence: Definition Dae-Won Kim School of Computer Science & Engineering Chung-Ang University What are AI Systems? Deep Blue defeated the world chess champion Garry Kasparov
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Foundations of Artificial Intelligence
 Foundations of Artificial Intelligence 1. Introduction Organizational Aspects, AI in Freiburg, Motivation, History, Approaches, and Examples Wolfram Burgard, Bernhard Nebel, and Martin Riedmiller Albert-Ludwigs-Universität
Foundations of Artificial Intelligence 1. Introduction Organizational Aspects, AI in Freiburg, Motivation, History, Approaches, and Examples Wolfram Burgard, Bernhard Nebel, and Martin Riedmiller Albert-Ludwigs-Universität
NimbRo 2005 Team Description
 In: RoboCup 2005 Humanoid League Team Descriptions, Osaka, July 2005. NimbRo 2005 Team Description Sven Behnke, Maren Bennewitz, Jürgen Müller, and Michael Schreiber Albert-Ludwigs-University of Freiburg,
In: RoboCup 2005 Humanoid League Team Descriptions, Osaka, July 2005. NimbRo 2005 Team Description Sven Behnke, Maren Bennewitz, Jürgen Müller, and Michael Schreiber Albert-Ludwigs-University of Freiburg,
Distributed, Play-Based Coordination for Robot Teams in Dynamic Environments
 Distributed, Play-Based Coordination for Robot Teams in Dynamic Environments Colin McMillen and Manuela Veloso School of Computer Science, Carnegie Mellon University, Pittsburgh, PA, U.S.A. fmcmillen,velosog@cs.cmu.edu
Distributed, Play-Based Coordination for Robot Teams in Dynamic Environments Colin McMillen and Manuela Veloso School of Computer Science, Carnegie Mellon University, Pittsburgh, PA, U.S.A. fmcmillen,velosog@cs.cmu.edu
Artificial Intelligence: Implications for Autonomous Weapons. Stuart Russell University of California, Berkeley
 Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline AI and autonomy State of the art Likely future developments Conclusions What is AI?
Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline AI and autonomy State of the art Likely future developments Conclusions What is AI?
Behavior generation for a mobile robot based on the adaptive fitness function
 Robotics and Autonomous Systems 40 (2002) 69 77 Behavior generation for a mobile robot based on the adaptive fitness function Eiji Uchibe a,, Masakazu Yanase b, Minoru Asada c a Human Information Science
Robotics and Autonomous Systems 40 (2002) 69 77 Behavior generation for a mobile robot based on the adaptive fitness function Eiji Uchibe a,, Masakazu Yanase b, Minoru Asada c a Human Information Science
UChile Team Research Report 2009
 UChile Team Research Report 2009 Javier Ruiz-del-Solar, Rodrigo Palma-Amestoy, Pablo Guerrero, Román Marchant, Luis Alberto Herrera, David Monasterio Department of Electrical Engineering, Universidad de
UChile Team Research Report 2009 Javier Ruiz-del-Solar, Rodrigo Palma-Amestoy, Pablo Guerrero, Román Marchant, Luis Alberto Herrera, David Monasterio Department of Electrical Engineering, Universidad de
World Technology Evaluation Center International Study of Robotics Research. Robotic Vehicles. Robotic vehicles study group:
 World Technology Evaluation Center International Study of Robotics Research Robotic Vehicles Robotic vehicles study group: Arthur Sanderson, Rensselaer Polytechnic Institute (Presenter) George Bekey, University
World Technology Evaluation Center International Study of Robotics Research Robotic Vehicles Robotic vehicles study group: Arthur Sanderson, Rensselaer Polytechnic Institute (Presenter) George Bekey, University
ZJUDancer Team Description Paper
 ZJUDancer Team Description Paper Tang Qing, Xiong Rong, Li Shen, Zhan Jianbo, and Feng Hao State Key Lab. of Industrial Technology, Zhejiang University, Hangzhou, China Abstract. This document describes
ZJUDancer Team Description Paper Tang Qing, Xiong Rong, Li Shen, Zhan Jianbo, and Feng Hao State Key Lab. of Industrial Technology, Zhejiang University, Hangzhou, China Abstract. This document describes
Multi-Fidelity Robotic Behaviors: Acting With Variable State Information
 From: AAAI-00 Proceedings. Copyright 2000, AAAI (www.aaai.org). All rights reserved. Multi-Fidelity Robotic Behaviors: Acting With Variable State Information Elly Winner and Manuela Veloso Computer Science
From: AAAI-00 Proceedings. Copyright 2000, AAAI (www.aaai.org). All rights reserved. Multi-Fidelity Robotic Behaviors: Acting With Variable State Information Elly Winner and Manuela Veloso Computer Science
Technical issues of MRL Virtual Robots Team RoboCup 2016, Leipzig Germany
 Technical issues of MRL Virtual Robots Team RoboCup 2016, Leipzig Germany Mohammad H. Shayesteh 1, Edris E. Aliabadi 1, Mahdi Salamati 1, Adib Dehghan 1, Danial JafaryMoghaddam 1 1 Islamic Azad University
Technical issues of MRL Virtual Robots Team RoboCup 2016, Leipzig Germany Mohammad H. Shayesteh 1, Edris E. Aliabadi 1, Mahdi Salamati 1, Adib Dehghan 1, Danial JafaryMoghaddam 1 1 Islamic Azad University
Extra Curricula. Robotics
 Extra Curricula Robotics On any given lunch time, you will find a buzz in the library as students work on a range of projects they are passionate about, sometimes independently and other times being coached
Extra Curricula Robotics On any given lunch time, you will find a buzz in the library as students work on a range of projects they are passionate about, sometimes independently and other times being coached
ECE 517: Reinforcement Learning in Artificial Intelligence
 ECE 517: Reinforcement Learning in Artificial Intelligence Lecture 17: Case Studies and Gradient Policy October 29, 2015 Dr. Itamar Arel College of Engineering Department of Electrical Engineering and
ECE 517: Reinforcement Learning in Artificial Intelligence Lecture 17: Case Studies and Gradient Policy October 29, 2015 Dr. Itamar Arel College of Engineering Department of Electrical Engineering and
Why Humanoid Robots?*
 Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
Front Digital page Strategy and Leadership
 Front Digital page Strategy and Leadership Who am I? Prof. Dr. Bob de Wit What concerns me? - How to best lead a firm - How to design the strategy process - How to best govern a country - How to adapt
Front Digital page Strategy and Leadership Who am I? Prof. Dr. Bob de Wit What concerns me? - How to best lead a firm - How to design the strategy process - How to best govern a country - How to adapt
Multi Robot Object Tracking and Self Localization
 Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems October 9-5, 2006, Beijing, China Multi Robot Object Tracking and Self Localization Using Visual Percept Relations
Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems October 9-5, 2006, Beijing, China Multi Robot Object Tracking and Self Localization Using Visual Percept Relations
Prof. Emil M. Petriu 17 January 2005 CEG 4392 Computer Systems Design Project (Winter 2005)
") Project title: Optical Path Tracking Mobile Robot with Object Picking Project number: 1 A mobile robot controlled by the Altera UP -2 board and/or the HC12 microprocessor will have to pick up and drop
Project title: Optical Path Tracking Mobile Robot with Object Picking Project number: 1 A mobile robot controlled by the Altera UP -2 board and/or the HC12 microprocessor will have to pick up and drop
The UT Austin Villa 3D Simulation Soccer Team 2007
 UT Austin Computer Sciences Technical Report AI07-348, September 2007. The UT Austin Villa 3D Simulation Soccer Team 2007 Shivaram Kalyanakrishnan and Peter Stone Department of Computer Sciences The University
UT Austin Computer Sciences Technical Report AI07-348, September 2007. The UT Austin Villa 3D Simulation Soccer Team 2007 Shivaram Kalyanakrishnan and Peter Stone Department of Computer Sciences The University
CS8678_L1. Course Introduction. CS 8678 Introduction to Robotics & AI Dr. Ken Hoganson. Start Momentarily
 Class Will CS8678_L1 Course Introduction CS 8678 Introduction to Robotics & AI Dr. Ken Hoganson Start Momentarily Contents Overview of syllabus (insert from web site) Description Textbook Mindstorms NXT
Class Will CS8678_L1 Course Introduction CS 8678 Introduction to Robotics & AI Dr. Ken Hoganson Start Momentarily Contents Overview of syllabus (insert from web site) Description Textbook Mindstorms NXT
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Does JoiTech Messi dream of RoboCup Goal?
 Does JoiTech Messi dream of RoboCup Goal? Yuji Oshima, Dai Hirose, Syohei Toyoyama, Keisuke Kawano, Shibo Qin, Tomoya Suzuki, Kazumasa Shibata, Takashi Takuma and Minoru Asada Dept. of Adaptive Machine
Does JoiTech Messi dream of RoboCup Goal? Yuji Oshima, Dai Hirose, Syohei Toyoyama, Keisuke Kawano, Shibo Qin, Tomoya Suzuki, Kazumasa Shibata, Takashi Takuma and Minoru Asada Dept. of Adaptive Machine
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015
 ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
1 The Challenge of Robotic Soccer
 1 The Challenge of Robotic Soccer 1.1 What is RoboCup? Raul Rojas Freie Universität Berlin RoboCup is the world championship in robotic soccer it has been held every year since 1997. During a preliminary
1 The Challenge of Robotic Soccer 1.1 What is RoboCup? Raul Rojas Freie Universität Berlin RoboCup is the world championship in robotic soccer it has been held every year since 1997. During a preliminary
A Multidisciplinary Approach to Cooperative Robotics
 A Multidisciplinary Approach to Cooperative Pedro U. Lima Intelligent Systems Lab Instituto Superior Técnico Lisbon, Portugal WHERE ARE WE? ISR ASSOCIATE LAB PARTNERS Multidisciplinary R&D in and Information
A Multidisciplinary Approach to Cooperative Pedro U. Lima Intelligent Systems Lab Instituto Superior Técnico Lisbon, Portugal WHERE ARE WE? ISR ASSOCIATE LAB PARTNERS Multidisciplinary R&D in and Information
Team Description Paper: Darmstadt Dribblers & Hajime Team (KidSize) and Darmstadt Dribblers (TeenSize)
 and Darmstadt Dribblers (TeenSize)") Team Description Paper: Darmstadt Dribblers & Hajime Team (KidSize) and Darmstadt Dribblers (TeenSize) Martin Friedmann 1, Jutta Kiener 1, Robert Kratz 1, Sebastian Petters 1, Hajime Sakamoto 2, Maximilian
Team Description Paper: Darmstadt Dribblers & Hajime Team (KidSize) and Darmstadt Dribblers (TeenSize) Martin Friedmann 1, Jutta Kiener 1, Robert Kratz 1, Sebastian Petters 1, Hajime Sakamoto 2, Maximilian
AC : A KICKING MECHANISM FOR A SOCCER-PLAYING ROBOT: A MULTIDISCIPLINARY SENIOR DESIGN PROJECT
 AC 2009-1908: A KICKING MECHANISM FOR A SOCCER-PLAYING ROBOT: A MULTIDISCIPLINARY SENIOR DESIGN PROJECT Yanfei Liu, Indiana University-Purdue University, Fort Wayne Jiaxin Zhao, Indiana University-Purdue
AC 2009-1908: A KICKING MECHANISM FOR A SOCCER-PLAYING ROBOT: A MULTIDISCIPLINARY SENIOR DESIGN PROJECT Yanfei Liu, Indiana University-Purdue University, Fort Wayne Jiaxin Zhao, Indiana University-Purdue
Artificial Intelligence & Robotics from RoboCup to Everyday Applications
 Artificial Intelligence & Robotics from RoboCup to Everyday Applications What is a robot? Luca Iocchi Department of Computer, Control, and Management Engineering Sapienza University of Rome, Italy www.dis.uniroma1.it/~iocchi
Artificial Intelligence & Robotics from RoboCup to Everyday Applications What is a robot? Luca Iocchi Department of Computer, Control, and Management Engineering Sapienza University of Rome, Italy www.dis.uniroma1.it/~iocchi
Team Playing Behavior in Robot Soccer: A Case-Based Reasoning Approach
 Team Playing Behavior in Robot Soccer: A Case-Based Reasoning Approach Raquel Ros 1, Ramon López de Màntaras 1, Josep Lluís Arcos 1 and Manuela Veloso 2 1 IIIA - Artificial Intelligence Research Institute
Team Playing Behavior in Robot Soccer: A Case-Based Reasoning Approach Raquel Ros 1, Ramon López de Màntaras 1, Josep Lluís Arcos 1 and Manuela Veloso 2 1 IIIA - Artificial Intelligence Research Institute
CS 730/830: Intro AI. Prof. Wheeler Ruml. TA Bence Cserna. Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1
 CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
RoboCup 2012 Best Humanoid Award Winner NimbRo TeenSize
 RoboCup 2012, Robot Soccer World Cup XVI, Springer, LNCS. RoboCup 2012 Best Humanoid Award Winner NimbRo TeenSize Marcell Missura, Cedrick Mu nstermann, Malte Mauelshagen, Michael Schreiber and Sven Behnke
RoboCup 2012, Robot Soccer World Cup XVI, Springer, LNCS. RoboCup 2012 Best Humanoid Award Winner NimbRo TeenSize Marcell Missura, Cedrick Mu nstermann, Malte Mauelshagen, Michael Schreiber and Sven Behnke
Team-NUST. Team Description for RoboCup-SPL 2014 in João Pessoa, Brazil
 Team-NUST Team Description for RoboCup-SPL 2014 in João Pessoa, Brazil Dr. Yasar Ayaz 1, Sajid Gul Khawaja 2, 1 RISE Research Center Department of Robotics and AI School of Mechanical and Manufacturing
Team-NUST Team Description for RoboCup-SPL 2014 in João Pessoa, Brazil Dr. Yasar Ayaz 1, Sajid Gul Khawaja 2, 1 RISE Research Center Department of Robotics and AI School of Mechanical and Manufacturing
What will the robot do during the final demonstration?
 SPENCER Questions & Answers What is project SPENCER about? SPENCER is a European Union-funded research project that advances technologies for intelligent robots that operate in human environments. Such
SPENCER Questions & Answers What is project SPENCER about? SPENCER is a European Union-funded research project that advances technologies for intelligent robots that operate in human environments. Such
LEVELS OF MULTI-ROBOT COORDINATION FOR DYNAMIC ENVIRONMENTS
 LEVELS OF MULTI-ROBOT COORDINATION FOR DYNAMIC ENVIRONMENTS Colin P. McMillen, Paul E. Rybski, Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, U.S.A. mcmillen@cs.cmu.edu,
LEVELS OF MULTI-ROBOT COORDINATION FOR DYNAMIC ENVIRONMENTS Colin P. McMillen, Paul E. Rybski, Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, U.S.A. mcmillen@cs.cmu.edu,
Hierarchical Reactive Control for Soccer Playing Humanoid Robots
 33 Hierarchical Reactive Control for Soccer Playing Humanoid Robots Sven Behnke, Jörg Stückler, Hauke Strasdat, and Michael Schreiber University of Freiburg, Computer Science Institute Germany 1. Introduction
33 Hierarchical Reactive Control for Soccer Playing Humanoid Robots Sven Behnke, Jörg Stückler, Hauke Strasdat, and Michael Schreiber University of Freiburg, Computer Science Institute Germany 1. Introduction
Artificial Intelligence for Games
 Artificial Intelligence for Games CSC404: Video Game Design Elias Adum Let s talk about AI Artificial Intelligence AI is the field of creating intelligent behaviour in machines. Intelligence understood
Artificial Intelligence for Games CSC404: Video Game Design Elias Adum Let s talk about AI Artificial Intelligence AI is the field of creating intelligent behaviour in machines. Intelligence understood