Content. 3 Preface 4 Who We Are 6 The RoboCup Initiative 7 Our Robots 8 Hardware 10 Software 12 Public Appearances 14 Achievements 15 Interested?
|
|
|
- Jocelyn Whitehead
- 6 years ago
- Views:
Transcription
1
2 Content 3 Preface 4 Who We Are 6 The RoboCup Initiative 7 Our Robots 8 Hardware 10 Software 12 Public Appearances 14 Achievements 15 Interested? 2
3 Preface Dear reader, Robots are in everyone's minds nowadays. In science fiction movies and books they are shown to be powerful machines, capable of extraordinary deeds. Although we're not quite there yet, researchers are working to realize the dream of intelligent machines that will assist us in our lives and make the world a better place. Robots are an inherent part of the technical evolution we will experience in the near future. In RoboCup, where teams of autonomous robots play soccer against each other, universities all over the world are trying to tackle the core problems at the heart of robotic research. The game of soccer poses an extreme challenge for today's robots: stable walking, perceiving the world visually, interacting with a highly dynamic environment and cooperating with other robots are all problems that have yet to be fully solved. Solutions for these problems are not only necessary to play soccer, but are also essential in many other areas: e.g. household aids for senior citizens, rescue operations in dangerous environments or autonomous vehicles. With its research, our team is not only making an active contribution to the creation of current and future robot generations, but is helping to solve societal challenges, too. The FUmanoids team 3
4 Who We Are The FUmanoids are a student-based project at the Freie Universität Berlin, led by professor Dr. Raúl Rojas. Their name is an amalgamation of Freie Universität (FU) and the English word, humanoids. Founded in 2006, the team of bachelor and master students develops humanoid robots and works in the fields of artificial intelligence, robotics, computer vision, electronics and mechanics. The aim of the project is to develop autonomous, soccer-playing robots. Any work the team members spend on the robots is done voluntarily, as the project is not part of the university curriculum. However, the university supports the team by providing equipment and a work space. The project is a unique opportunity to apply what has been learned and to pursue personal research interests. Creative ideas can be tested and verified on actual robots. Additionally, students gather valuable experience while working with complex software in a professional team. The team consists of six humanoid robots. On average, the robots were designed and programmed by a dozen bachelor and master students. 4


5 5

6 The RoboCup Initiative RoboCup is an international initiative to help facilitate the exchange and comparison of knowledge in the field of robotics. It was founded with the goal to beat the human soccer world champions in a fair match by the middle of the 21st century. This new standard challenge within artificial intelligence (AI) research allows us to compare and experience any progress made in the robotics field. It increases the exchange between scientists from all over the world. Competitions Teams from all around the globe compete in national competitions (e.g. RoboCup German Open) and the annual RoboCup world championship. These events cover multiple robot leagues. More than 2,600 participants from 45 countries participated in the 2013 RoboCup competition in Eindhoven. The championship attracted over 40,000 visitors. RoboCup events are covered by both national and international media outlets. Humanoid League The FUmanoids participate in the Humanoid League, one of the most popular RoboCup soccer leagues. They play in the kid size category where 24 teams have their robots play in 4 vs 4 matches. These robots are up to 90cm in height and are designed, built and programmed by the teams themselves. 6

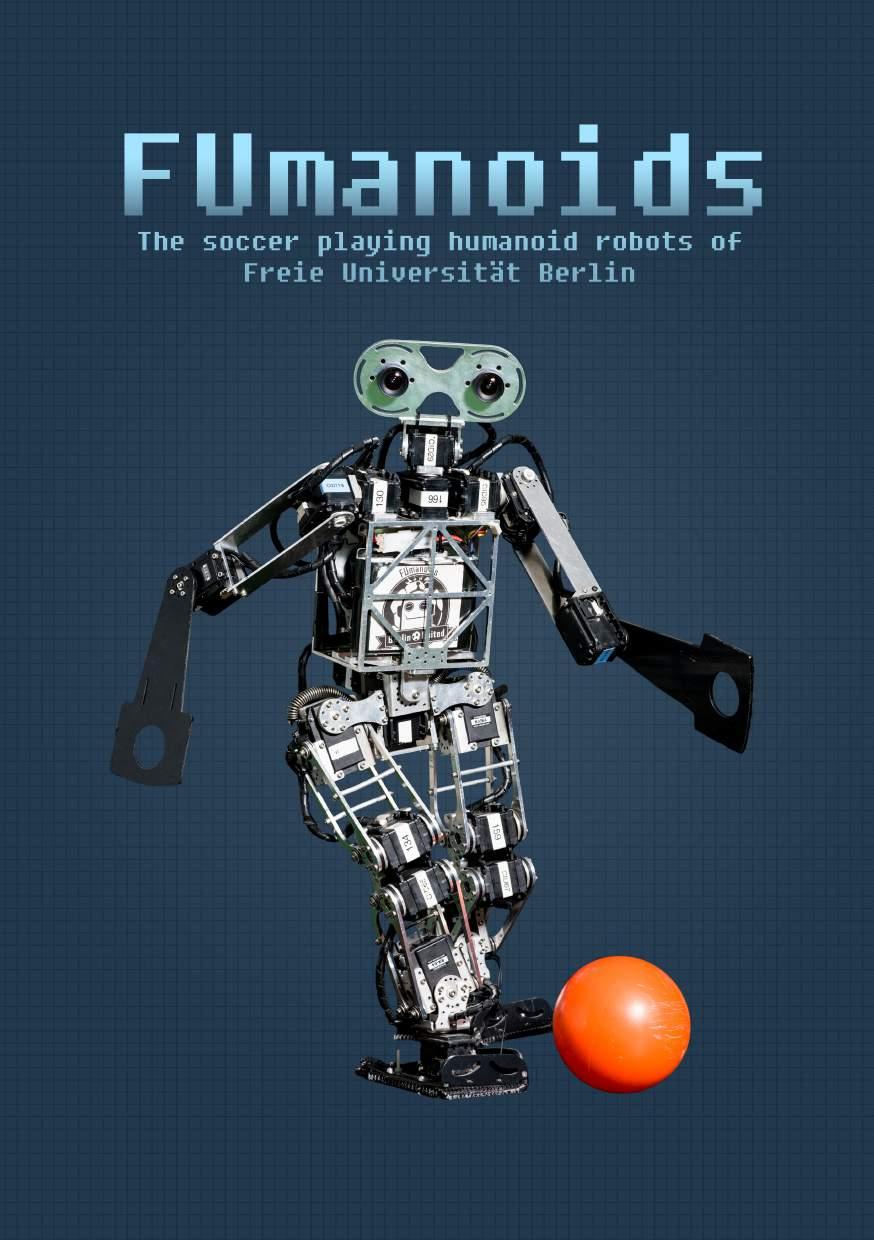
7 Our Robots The FUmanoid team currently consists of six robots. The newest model is an improved version of our robots from The robots use a web cam to gather visual information about their surroundings. Using three gyroscopes and acceleration sensors they maintain their balance while walking on two legs. They play autonomously and select where to walk and when to kick the ball. If they fall down, they get right back up again and continue playing. Design: Height: 65cm Weight: 4,5kg Degrees of Freedom: 20 Hardware: CPU: ODROID-X2 mit 4 x 1.7 GHz Webcam: Logitech c920 ( ) OS: Linaro (based on Ubuntu) 7

8 Hardware The rules of the Humanoid League dictate many aspects of the robots design. They are updated every year to facilitate the development of new designs and to get closer to the 2050 goal of winning a fair match against the FIFA champions. The rules require the robots to roughly have human proportions. They are only allowed to use sensors that resemble humanlike senses, e.g. vision, touch or sense of balance. Contrary to human soccer players, they may use WiFi to communicate with each other and with the referee. Fulfilling all soccer-related tasks requires a coherent hardware concept. Additionally, the team has to consider limitations of weight, battery capacity and computational power in their design. Finally, funding sometimes has a limiting factor in how far a desired hardware design can be realized. 8

9 Power Board The power board is a smart power-supply circuit board the team developed in early It has undergone a process of constant improvement ever since. The board not only provides the whole robot with the correct current, but also detects errors in the electronic system. If a short circuit occurs, the power board protects the electronic components by switching them off in less than two milliseconds. Additionally, the current battery charge level can easily be seen by the human handlers thanks to a colored LED. Stereo Vision Currently, almost all teams in the Humanoid League use a single camera to gather visual data. This approach comes with limitations, as no depth perception is available. Therefore the FUmanoids have started integrating a stereo camera, developed by our research group at Freie Universität. This camera operates in a similar way to the human eyes. It provides the robots with accurate depth information which allows them to identify the distance and location of objects more precisely. 9


10 Software The robots are only able to work efficiently with powerful software. It prepares and processes sensor data, controls the hardware and makes decisions about the robots' behavior. The FUmanoids show a high degree of creativity and innovation in this area. Their success in competitions is based on the development and implementation of new technology. Currently the focus lies on three main areas: Image Processing Image processing extracts detailed information from the camera images. With the help of color-classified images and object extractors, the position of the two goals, the field lines, the ball and other robots are determined. Based on this data, the behavior control makes decisions. The software has to overcome difficulties like blurred images as a result of walking, changing lighting conditions or, thanks to the colorfully dressed audience, a highly dynamic background. 10

11 Position Data After the image-processing has determined the objects on the playing field and calculated their coordinates relative to the robot, the software then creates a global world model based on this data. This allows the player to guess the position of objects very precisely, even if they cannot be seen at that precise moment. Thus, the position of the ball rolling behind another robot can be predicted based on the physical properties of its movement - although the ball is currently hidden. Localization Based on the world model and visual data, the robots will constantly try to locate themselves on the playing field. Knowing where the robot itself and all other objects are, is an important prerequisite for effectively planning the next moves. A particular challenge is the symmetry problem. Both halves of the playing field are absolutely identical and own goals have already been the downfall of many teams. Our current approach combines several types of information to aid this process. On the one hand, the robot uses the position of non-moving objects like goal posts. On the other hand, the positions of team members can provide orientation. In addition, the goalie acts as a corrective function for other players estimations, as it is in a well defined and easy-to-verify position throughout the game. 11

12 Pu blic Appearan c es The FUmanoids have demonstrated their skills at various events. They have participated in tournaments ranging from 2,000 visitors at local competitions to 40,000 visitors at the RoboCup world championship. Aside from students and people interested in technology, families with children make up the bulk of the audience. The FUmanoids are visited regularly by camera teams from national and international TV stations and are interviewed by print and online media. In doing so, the robots have already reached a broad audience. Additionally, we also publish updates on our homepage, our YouTube channel or on Facebook for those who are interested in our research and progress. Event Visitors Participants Robocup 40,000 2,456 German Open 3, Iran Open 5,000 1,000 Long Night of Science 2,000 2 Teams 12


13 13
 2nd place RoboCup 2009 (Austria) 2nd place RoboCup German Open 2008 3rd place RoboCup 2007 (USA) At the 2012 and 2013 RoboCup competitions the FUmanoids reached the")
14 Achievements 1st place RoboCup German Open st place RoboCup Iran Open th place RoboCup German Open nd place RoboCup German Open th place Robocup 2011 (Turkey) 2nd place RoboCup 2010 (Singapore) 2nd place RoboCup 2009 (Austria) 2nd place RoboCup German Open rd place RoboCup 2007 (USA) At the 2012 and 2013 RoboCup competitions the FUmanoids reached the quarterfinals. The team did not participate in RoboCup

15 Interested? Got interested? On the back of this brochure you will find our contact details. We are happy to answer all of your questions. Are you a student? The FUmanoids offer topics for bachelor and master theses as well as software projects on a regular basis. We are always happy to welcome new team members. Support us! The development of modern autonomous robots is a costly undertaking. As a student-based project we are grateful for every sponsor and are happy to offer individual sponsoring deals. Don't hesitate to contact us! 15



16 Version: February 2015 AG Intelligente Systeme und Robotik Freie Universität Berlin Institut für Informatik Arnimallee Berlin Germany info@fumanoids.de Photos: FUmanoids, Kristina Schippling, Thomas Trutschel, Jakob Weber
FU-Fighters. The Soccer Robots of Freie Universität Berlin. Why RoboCup? What is RoboCup?
 The Soccer Robots of Freie Universität Berlin We have been building autonomous mobile robots since 1998. Our team, composed of students and researchers from the Mathematics and Computer Science Department,
The Soccer Robots of Freie Universität Berlin We have been building autonomous mobile robots since 1998. Our team, composed of students and researchers from the Mathematics and Computer Science Department,
FalconBots RoboCup Humanoid Kid -Size 2014 Team Description Paper. Minero, V., Juárez, J.C., Arenas, D. U., Quiroz, J., Flores, J.A.
 FalconBots RoboCup Humanoid Kid -Size 2014 Team Description Paper Minero, V., Juárez, J.C., Arenas, D. U., Quiroz, J., Flores, J.A. Robotics Application Workshop, Instituto Tecnológico Superior de San
FalconBots RoboCup Humanoid Kid -Size 2014 Team Description Paper Minero, V., Juárez, J.C., Arenas, D. U., Quiroz, J., Flores, J.A. Robotics Application Workshop, Instituto Tecnológico Superior de San
RoboCup. Presented by Shane Murphy April 24, 2003
 RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
Baset Adult-Size 2016 Team Description Paper
 Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
FUmanoid Team Description Paper 2010
 FUmanoid Team Description Paper 2010 Bennet Fischer, Steffen Heinrich, Gretta Hohl, Felix Lange, Tobias Langner, Sebastian Mielke, Hamid Reza Moballegh, Stefan Otte, Raúl Rojas, Naja von Schmude, Daniel
FUmanoid Team Description Paper 2010 Bennet Fischer, Steffen Heinrich, Gretta Hohl, Felix Lange, Tobias Langner, Sebastian Mielke, Hamid Reza Moballegh, Stefan Otte, Raúl Rojas, Naja von Schmude, Daniel
EROS TEAM. Team Description for Humanoid Kidsize League of Robocup2013
 EROS TEAM Team Description for Humanoid Kidsize League of Robocup2013 Azhar Aulia S., Ardiansyah Al-Faruq, Amirul Huda A., Edwin Aditya H., Dimas Pristofani, Hans Bastian, A. Subhan Khalilullah, Dadet
EROS TEAM Team Description for Humanoid Kidsize League of Robocup2013 Azhar Aulia S., Ardiansyah Al-Faruq, Amirul Huda A., Edwin Aditya H., Dimas Pristofani, Hans Bastian, A. Subhan Khalilullah, Dadet
Hierarchical Controller for Robotic Soccer
 Hierarchical Controller for Robotic Soccer Byron Knoll Cognitive Systems 402 April 13, 2008 ABSTRACT RoboCup is an initiative aimed at advancing Artificial Intelligence (AI) and robotics research. This
Hierarchical Controller for Robotic Soccer Byron Knoll Cognitive Systems 402 April 13, 2008 ABSTRACT RoboCup is an initiative aimed at advancing Artificial Intelligence (AI) and robotics research. This
IRH 2017 / Group 10. Hosen Gakuen High School Risu inter. Takeru Saito, Akitaka Fujii. Theme3 Most advanced technologies of robots
 IRH 2017 / Group 10 Hosen Gakuen High School Risu inter Takeru Saito, Akitaka Fujii Theme3 Most advanced technologies of robots Do you know this? Bipedal robot Double inverted pendulum model 1968 ZMP theory
IRH 2017 / Group 10 Hosen Gakuen High School Risu inter Takeru Saito, Akitaka Fujii Theme3 Most advanced technologies of robots Do you know this? Bipedal robot Double inverted pendulum model 1968 ZMP theory
KMUTT Kickers: Team Description Paper
 KMUTT Kickers: Team Description Paper Thavida Maneewarn, Xye, Korawit Kawinkhrue, Amnart Butsongka, Nattapong Kaewlek King Mongkut s University of Technology Thonburi, Institute of Field Robotics (FIBO)
KMUTT Kickers: Team Description Paper Thavida Maneewarn, Xye, Korawit Kawinkhrue, Amnart Butsongka, Nattapong Kaewlek King Mongkut s University of Technology Thonburi, Institute of Field Robotics (FIBO)
NimbRo 2005 Team Description
 In: RoboCup 2005 Humanoid League Team Descriptions, Osaka, July 2005. NimbRo 2005 Team Description Sven Behnke, Maren Bennewitz, Jürgen Müller, and Michael Schreiber Albert-Ludwigs-University of Freiburg,
In: RoboCup 2005 Humanoid League Team Descriptions, Osaka, July 2005. NimbRo 2005 Team Description Sven Behnke, Maren Bennewitz, Jürgen Müller, and Michael Schreiber Albert-Ludwigs-University of Freiburg,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014
 ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014 Yu DongDong, Xiang Chuan, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014 Yu DongDong, Xiang Chuan, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015
 ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
Robo-Erectus Jr-2013 KidSize Team Description Paper.
 Robo-Erectus Jr-2013 KidSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon and Changjiu Zhou. Advanced Robotics and Intelligent Control Centre, Singapore Polytechnic, 500 Dover Road, 139651,
Robo-Erectus Jr-2013 KidSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon and Changjiu Zhou. Advanced Robotics and Intelligent Control Centre, Singapore Polytechnic, 500 Dover Road, 139651,
How Students Teach Robots to Think The Example of the Vienna Cubes a Robot Soccer Team
 How Students Teach Robots to Think The Example of the Vienna Cubes a Robot Soccer Team Robert Pucher Paul Kleinrath Alexander Hofmann Fritz Schmöllebeck Department of Electronic Abstract: Autonomous Robot
How Students Teach Robots to Think The Example of the Vienna Cubes a Robot Soccer Team Robert Pucher Paul Kleinrath Alexander Hofmann Fritz Schmöllebeck Department of Electronic Abstract: Autonomous Robot
Intelligent Humanoid Robot
 Intelligent Humanoid Robot Prof. Mayez Al-Mouhamed 22-403, Fall 2007 http://www.ccse.kfupm,.edu.sa/~mayez Computer Engineering Department King Fahd University of Petroleum and Minerals 1 RoboCup : Goal
Intelligent Humanoid Robot Prof. Mayez Al-Mouhamed 22-403, Fall 2007 http://www.ccse.kfupm,.edu.sa/~mayez Computer Engineering Department King Fahd University of Petroleum and Minerals 1 RoboCup : Goal
ZJUDancer Team Description Paper
 ZJUDancer Team Description Paper Tang Qing, Xiong Rong, Li Shen, Zhan Jianbo, and Feng Hao State Key Lab. of Industrial Technology, Zhejiang University, Hangzhou, China Abstract. This document describes
ZJUDancer Team Description Paper Tang Qing, Xiong Rong, Li Shen, Zhan Jianbo, and Feng Hao State Key Lab. of Industrial Technology, Zhejiang University, Hangzhou, China Abstract. This document describes
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Kid-Size Humanoid Soccer Robot Design by TKU Team
 Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
Nao Devils Dortmund. Team Description for RoboCup Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann
 Nao Devils Dortmund Team Description for RoboCup 2014 Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann Robotics Research Institute Section Information Technology TU Dortmund University 44221 Dortmund,
Nao Devils Dortmund Team Description for RoboCup 2014 Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann Robotics Research Institute Section Information Technology TU Dortmund University 44221 Dortmund,
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League
 Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League Chung-Hsien Kuo, Yu-Cheng Kuo, Yu-Ping Shen, Chen-Yun Kuo, Yi-Tseng Lin 1 Department of Electrical Egineering, National
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League Chung-Hsien Kuo, Yu-Cheng Kuo, Yu-Ping Shen, Chen-Yun Kuo, Yi-Tseng Lin 1 Department of Electrical Egineering, National
Task Allocation: Role Assignment. Dr. Daisy Tang
 Task Allocation: Role Assignment Dr. Daisy Tang Outline Multi-robot dynamic role assignment Task Allocation Based On Roles Usually, a task is decomposed into roleseither by a general autonomous planner,
Task Allocation: Role Assignment Dr. Daisy Tang Outline Multi-robot dynamic role assignment Task Allocation Based On Roles Usually, a task is decomposed into roleseither by a general autonomous planner,
KUDOS Team Description Paper for Humanoid Kidsize League of RoboCup 2016
 KUDOS Team Description Paper for Humanoid Kidsize League of RoboCup 2016 Hojin Jeon, Donghyun Ahn, Yeunhee Kim, Yunho Han, Jeongmin Park, Soyeon Oh, Seri Lee, Junghun Lee, Namkyun Kim, Donghee Han, ChaeEun
KUDOS Team Description Paper for Humanoid Kidsize League of RoboCup 2016 Hojin Jeon, Donghyun Ahn, Yeunhee Kim, Yunho Han, Jeongmin Park, Soyeon Oh, Seri Lee, Junghun Lee, Namkyun Kim, Donghee Han, ChaeEun
CORC 3303 Exploring Robotics. Why Teams?
 Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Construction of Mobile Robots
 Construction of Mobile Robots 716.091 Institute for Software Technology 1 Previous Years Conference Robot https://www.youtube.com/watch?v=wu7zyzja89i Breakfast Robot https://youtu.be/dtoqiklqcug 2 This
Construction of Mobile Robots 716.091 Institute for Software Technology 1 Previous Years Conference Robot https://www.youtube.com/watch?v=wu7zyzja89i Breakfast Robot https://youtu.be/dtoqiklqcug 2 This
YRA Team Description 2011
 YRA Team Description 2011 Mohammad HosseinKargar, MeisamBakhshi, Ali Esmaeilpour, Mohammad Amini, Mohammad Dashti Rahmat Abadi, Abolfazl Golaftab, Ghazanfar Zahedi, Mohammadreza Jenabzadeh Yazd Robotic
YRA Team Description 2011 Mohammad HosseinKargar, MeisamBakhshi, Ali Esmaeilpour, Mohammad Amini, Mohammad Dashti Rahmat Abadi, Abolfazl Golaftab, Ghazanfar Zahedi, Mohammadreza Jenabzadeh Yazd Robotic
BehRobot Humanoid Adult Size Team
 BehRobot Humanoid Adult Size Team Team Description Paper 2014 Mohammadreza Mohades Kasaei, Mohsen Taheri, Mohammad Rahimi, Ali Ahmadi, Ehsan Shahri, Saman Saraf, Yousof Geramiannejad, Majid Delshad, Farsad
BehRobot Humanoid Adult Size Team Team Description Paper 2014 Mohammadreza Mohades Kasaei, Mohsen Taheri, Mohammad Rahimi, Ali Ahmadi, Ehsan Shahri, Saman Saraf, Yousof Geramiannejad, Majid Delshad, Farsad
A Lego-Based Soccer-Playing Robot Competition For Teaching Design
 Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
Robocup Electrical Team 2006 Description Paper
 Robocup Electrical Team 2006 Description Paper Name: Strive2006 (Shanghai University, P.R.China) Address: Box.3#,No.149,Yanchang load,shanghai, 200072 Email: wanmic@163.com Homepage: robot.ccshu.org Abstract:
Robocup Electrical Team 2006 Description Paper Name: Strive2006 (Shanghai University, P.R.China) Address: Box.3#,No.149,Yanchang load,shanghai, 200072 Email: wanmic@163.com Homepage: robot.ccshu.org Abstract:
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League
 Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League Chung-Hsien Kuo 1, Hung-Chyun Chou 1, Jui-Chou Chung 1, Po-Chung Chia 2, Shou-Wei Chi 1, Yu-De Lien 1 1 Department
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League Chung-Hsien Kuo 1, Hung-Chyun Chou 1, Jui-Chou Chung 1, Po-Chung Chia 2, Shou-Wei Chi 1, Yu-De Lien 1 1 Department
RoboCup TDP Team ZSTT
 RoboCup 2018 - TDP Team ZSTT Jaesik Jeong 1, Jeehyun Yang 1, Yougsup Oh 2, Hyunah Kim 2, Amirali Setaieshi 3, Sourosh Sedeghnejad 3, and Jacky Baltes 1 1 Educational Robotics Centre, National Taiwan Noremal
RoboCup 2018 - TDP Team ZSTT Jaesik Jeong 1, Jeehyun Yang 1, Yougsup Oh 2, Hyunah Kim 2, Amirali Setaieshi 3, Sourosh Sedeghnejad 3, and Jacky Baltes 1 1 Educational Robotics Centre, National Taiwan Noremal
WF Wolves & Taura Bots Humanoid Kid Size Team Description for RoboCup 2016
 WF Wolves & Taura Bots Humanoid Kid Size Team Description for RoboCup 2016 Björn Anders 1, Frank Stiddien 1, Oliver Krebs 1, Reinhard Gerndt 1, Tobias Bolze 1, Tom Lorenz 1, Xiang Chen 1, Fabricio Tonetto
WF Wolves & Taura Bots Humanoid Kid Size Team Description for RoboCup 2016 Björn Anders 1, Frank Stiddien 1, Oliver Krebs 1, Reinhard Gerndt 1, Tobias Bolze 1, Tom Lorenz 1, Xiang Chen 1, Fabricio Tonetto
Extra Curricula. Robotics
 Extra Curricula Robotics On any given lunch time, you will find a buzz in the library as students work on a range of projects they are passionate about, sometimes independently and other times being coached
Extra Curricula Robotics On any given lunch time, you will find a buzz in the library as students work on a range of projects they are passionate about, sometimes independently and other times being coached
Courses on Robotics by Guest Lecturing at Balkan Countries
 Courses on Robotics by Guest Lecturing at Balkan Countries Hans-Dieter Burkhard Humboldt University Berlin With Great Thanks to all participating student teams and their institutes! 1 Courses on Balkan
Courses on Robotics by Guest Lecturing at Balkan Countries Hans-Dieter Burkhard Humboldt University Berlin With Great Thanks to all participating student teams and their institutes! 1 Courses on Balkan
Team KMUTT: Team Description Paper
 Team KMUTT: Team Description Paper Thavida Maneewarn, Xye, Pasan Kulvanit, Sathit Wanitchaikit, Panuvat Sinsaranon, Kawroong Saktaweekulkit, Nattapong Kaewlek Djitt Laowattana King Mongkut s University
Team KMUTT: Team Description Paper Thavida Maneewarn, Xye, Pasan Kulvanit, Sathit Wanitchaikit, Panuvat Sinsaranon, Kawroong Saktaweekulkit, Nattapong Kaewlek Djitt Laowattana King Mongkut s University
Team Description Paper: Darmstadt Dribblers & Hajime Team (KidSize) and Darmstadt Dribblers (TeenSize)
 and Darmstadt Dribblers (TeenSize)") Team Description Paper: Darmstadt Dribblers & Hajime Team (KidSize) and Darmstadt Dribblers (TeenSize) Martin Friedmann 1, Jutta Kiener 1, Robert Kratz 1, Sebastian Petters 1, Hajime Sakamoto 2, Maximilian
Team Description Paper: Darmstadt Dribblers & Hajime Team (KidSize) and Darmstadt Dribblers (TeenSize) Martin Friedmann 1, Jutta Kiener 1, Robert Kratz 1, Sebastian Petters 1, Hajime Sakamoto 2, Maximilian
Hanuman KMUTT: Team Description Paper
 Hanuman KMUTT: Team Description Paper Wisanu Jutharee, Sathit Wanitchaikit, Boonlert Maneechai, Natthapong Kaewlek, Thanniti Khunnithiwarawat, Pongsakorn Polchankajorn, Nakarin Suppakun, Narongsak Tirasuntarakul,
Hanuman KMUTT: Team Description Paper Wisanu Jutharee, Sathit Wanitchaikit, Boonlert Maneechai, Natthapong Kaewlek, Thanniti Khunnithiwarawat, Pongsakorn Polchankajorn, Nakarin Suppakun, Narongsak Tirasuntarakul,
Does JoiTech Messi dream of RoboCup Goal?
 Does JoiTech Messi dream of RoboCup Goal? Yuji Oshima, Dai Hirose, Syohei Toyoyama, Keisuke Kawano, Shibo Qin, Tomoya Suzuki, Kazumasa Shibata, Takashi Takuma and Minoru Asada Dept. of Adaptive Machine
Does JoiTech Messi dream of RoboCup Goal? Yuji Oshima, Dai Hirose, Syohei Toyoyama, Keisuke Kawano, Shibo Qin, Tomoya Suzuki, Kazumasa Shibata, Takashi Takuma and Minoru Asada Dept. of Adaptive Machine
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future
 RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
SitiK KIT. Team Description for the Humanoid KidSize League of RoboCup 2010
 SitiK KIT Team Description for the Humanoid KidSize League of RoboCup 2010 Shohei Takesako, Nasuka Awai, Kei Sugawara, Hideo Hattori, Yuichiro Hirai, Takesi Miyata, Keisuke Urushibata, Tomoya Oniyama,
SitiK KIT Team Description for the Humanoid KidSize League of RoboCup 2010 Shohei Takesako, Nasuka Awai, Kei Sugawara, Hideo Hattori, Yuichiro Hirai, Takesi Miyata, Keisuke Urushibata, Tomoya Oniyama,
Team Description 2006 for Team RO-PE A
 Team Description 2006 for Team RO-PE A Chew Chee-Meng, Samuel Mui, Lim Tongli, Ma Chongyou, and Estella Ngan National University of Singapore, 119260 Singapore {mpeccm, g0500307, u0204894, u0406389, u0406316}@nus.edu.sg
Team Description 2006 for Team RO-PE A Chew Chee-Meng, Samuel Mui, Lim Tongli, Ma Chongyou, and Estella Ngan National University of Singapore, 119260 Singapore {mpeccm, g0500307, u0204894, u0406389, u0406316}@nus.edu.sg
Team MU-L8 Humanoid League TeenSize Team Description Paper 2014
 Team MU-L8 Humanoid League TeenSize Team Description Paper 2014 Adam Stroud, Kellen Carey, Raoul Chinang, Nicole Gibson, Joshua Panka, Wajahat Ali, Matteo Brucato, Christopher Procak, Matthew Morris, John
Team MU-L8 Humanoid League TeenSize Team Description Paper 2014 Adam Stroud, Kellen Carey, Raoul Chinang, Nicole Gibson, Joshua Panka, Wajahat Ali, Matteo Brucato, Christopher Procak, Matthew Morris, John
EDUCATIONAL ROBOTICS' INTRODUCTORY COURSE
 AESTIT EDUCATIONAL ROBOTICS' INTRODUCTORY COURSE Manuel Filipe P. C. M. Costa University of Minho Robotics in the classroom Robotics competitions The vast majority of students learn in a concrete manner
AESTIT EDUCATIONAL ROBOTICS' INTRODUCTORY COURSE Manuel Filipe P. C. M. Costa University of Minho Robotics in the classroom Robotics competitions The vast majority of students learn in a concrete manner
Dutch Nao Team. Team Description for Robocup Eindhoven, The Netherlands November 8, 2012
 Dutch Nao Team Team Description for Robocup 2013 - Eindhoven, The Netherlands http://www.dutchnaoteam.nl November 8, 2012 Duncan ten Velthuis, Camiel Verschoor, Auke Wiggers, Hessel van der Molen, Tijmen
Dutch Nao Team Team Description for Robocup 2013 - Eindhoven, The Netherlands http://www.dutchnaoteam.nl November 8, 2012 Duncan ten Velthuis, Camiel Verschoor, Auke Wiggers, Hessel van der Molen, Tijmen
The description of team KIKS
 The description of team KIKS Keitaro YAMAUCHI 1, Takamichi YOSHIMOTO 2, Takashi HORII 3, Takeshi CHIKU 4, Masato WATANABE 5,Kazuaki ITOH 6 and Toko SUGIURA 7 Toyota National College of Technology Department
The description of team KIKS Keitaro YAMAUCHI 1, Takamichi YOSHIMOTO 2, Takashi HORII 3, Takeshi CHIKU 4, Masato WATANABE 5,Kazuaki ITOH 6 and Toko SUGIURA 7 Toyota National College of Technology Department
Alternative English 1010 Major Assignment with Activities and Handouts. Portraits
 Alternative English 1010 Major Assignment with Activities and Handouts Portraits Overview. In the Unit 1 Letter to Students, I introduced you to the idea of threshold theory and the first two threshold
Alternative English 1010 Major Assignment with Activities and Handouts Portraits Overview. In the Unit 1 Letter to Students, I introduced you to the idea of threshold theory and the first two threshold
RoboCup was created in 1996 by a group of Japanese,
 RoboCup Soccer Leagues Daniele Nardi, Itsuki Noda, Fernando Ribeiro, Peter Stone, Oskar von Stryk, Manuela Veloso n RoboCup was created in 1996 by a group of Japanese, American, and European artificial
RoboCup Soccer Leagues Daniele Nardi, Itsuki Noda, Fernando Ribeiro, Peter Stone, Oskar von Stryk, Manuela Veloso n RoboCup was created in 1996 by a group of Japanese, American, and European artificial
CIT Brains (Kid Size League)
") CIT Brains (Kid Size League) Yasuo Hayashibara 1, Hideaki Minakata 1, Kiyoshi Irie 1, Taiki Fukuda 1, Victor Tee Sin Loong 1, Daiki Maekawa 1, Yusuke Ito 1, Takamasa Akiyama 1, Taiitiro Mashiko 1, Kohei
CIT Brains (Kid Size League) Yasuo Hayashibara 1, Hideaki Minakata 1, Kiyoshi Irie 1, Taiki Fukuda 1, Victor Tee Sin Loong 1, Daiki Maekawa 1, Yusuke Ito 1, Takamasa Akiyama 1, Taiitiro Mashiko 1, Kohei
Overview Agents, environments, typical components
 Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
GermanTeam The German National RoboCup Team
 GermanTeam 2008 The German National RoboCup Team David Becker 2, Jörg Brose 2, Daniel Göhring 3, Matthias Jüngel 3, Max Risler 2, and Thomas Röfer 1 1 Deutsches Forschungszentrum für Künstliche Intelligenz,
GermanTeam 2008 The German National RoboCup Team David Becker 2, Jörg Brose 2, Daniel Göhring 3, Matthias Jüngel 3, Max Risler 2, and Thomas Röfer 1 1 Deutsches Forschungszentrum für Künstliche Intelligenz,
Development and Evaluation of a Centaur Robot
 Development and Evaluation of a Centaur Robot 1 Satoshi Tsuda, 1 Kuniya Shinozaki, and 2 Ryohei Nakatsu 1 Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan {amy65823,
Development and Evaluation of a Centaur Robot 1 Satoshi Tsuda, 1 Kuniya Shinozaki, and 2 Ryohei Nakatsu 1 Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan {amy65823,
MRL Team Description Paper for Humanoid KidSize League of RoboCup 2017
 MRL Team Description Paper for Humanoid KidSize League of RoboCup 2017 Meisam Teimouri 1, Amir Salimi, Ashkan Farhadi, Alireza Fatehi, Hamed Mahmoudi, Hamed Sharifi and Mohammad Hosseini Sefat Mechatronics
MRL Team Description Paper for Humanoid KidSize League of RoboCup 2017 Meisam Teimouri 1, Amir Salimi, Ashkan Farhadi, Alireza Fatehi, Hamed Mahmoudi, Hamed Sharifi and Mohammad Hosseini Sefat Mechatronics
Multi-Platform Soccer Robot Development System
 Multi-Platform Soccer Robot Development System Hui Wang, Han Wang, Chunmiao Wang, William Y. C. Soh Division of Control & Instrumentation, School of EEE Nanyang Technological University Nanyang Avenue,
Multi-Platform Soccer Robot Development System Hui Wang, Han Wang, Chunmiao Wang, William Y. C. Soh Division of Control & Instrumentation, School of EEE Nanyang Technological University Nanyang Avenue,
Learning and Using Models of Kicking Motions for Legged Robots
 Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Berlin United - NaoTH 2014
 Berlin United - NaoTH 2014 Heinrich Mellmann, Marcus Scheunemann, Hans-Dieter Burkhard, and Verena Hafner Kognitive Robotik, Institut für Informatik, Humboldt-Universität zu Berlin, Berlin, Germany http://naoth.de
Berlin United - NaoTH 2014 Heinrich Mellmann, Marcus Scheunemann, Hans-Dieter Burkhard, and Verena Hafner Kognitive Robotik, Institut für Informatik, Humboldt-Universität zu Berlin, Berlin, Germany http://naoth.de
Application from Hamburg Bit-Bots for RoboCup 2017
 Application from Hamburg Bit-Bots for RoboCup 2017 Rami Aly, Marc Bestmann, Fabian Fiedler, Niklas Fiedler, Ronja Güldenring, Jasper Güldenstein, Christopher Hahn, Julius Hansen, Judith Hartfill, Nicolas
Application from Hamburg Bit-Bots for RoboCup 2017 Rami Aly, Marc Bestmann, Fabian Fiedler, Niklas Fiedler, Ronja Güldenring, Jasper Güldenstein, Christopher Hahn, Julius Hansen, Judith Hartfill, Nicolas
RoboPatriots: George Mason University 2010 RoboCup Team
 RoboPatriots: George Mason University 2010 RoboCup Team Keith Sullivan, Christopher Vo, Sean Luke, and Jyh-Ming Lien Department of Computer Science, George Mason University 4400 University Drive MSN 4A5,
RoboPatriots: George Mason University 2010 RoboCup Team Keith Sullivan, Christopher Vo, Sean Luke, and Jyh-Ming Lien Department of Computer Science, George Mason University 4400 University Drive MSN 4A5,
Team RoBIU. Team Description for Humanoid KidSize League of RoboCup 2014
 Team RoBIU Team Description for Humanoid KidSize League of RoboCup 2014 Bartal Moshe, Chaimovich Yogev, Dar Nati, Druker Itai, Farbstein Yair, Levi Roi, Kabariti Shani, Kalily Elran, Mayaan Tal, Negrin
Team RoBIU Team Description for Humanoid KidSize League of RoboCup 2014 Bartal Moshe, Chaimovich Yogev, Dar Nati, Druker Itai, Farbstein Yair, Levi Roi, Kabariti Shani, Kalily Elran, Mayaan Tal, Negrin
Robotic Systems ECE 401RB Fall 2007
 The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
Franco German press release. following the interview between Ministers Le Maire and Altmaier, 18 December.
 Franco German press release following the interview between Ministers Le Maire and Altmaier, 18 December. Bruno Le Maire, Minister of Economy and Finance, met with Peter Altmaier, German Federal Minister
Franco German press release following the interview between Ministers Le Maire and Altmaier, 18 December. Bruno Le Maire, Minister of Economy and Finance, met with Peter Altmaier, German Federal Minister
1 Abstract and Motivation
 1 Abstract and Motivation Robust robotic perception, manipulation, and interaction in domestic scenarios continues to present a hard problem: domestic environments tend to be unstructured, are constantly
1 Abstract and Motivation Robust robotic perception, manipulation, and interaction in domestic scenarios continues to present a hard problem: domestic environments tend to be unstructured, are constantly
Representation Learning for Mobile Robots in Dynamic Environments
 Representation Learning for Mobile Robots in Dynamic Environments Olivia Michael Supervised by A/Prof. Oliver Obst Western Sydney University Vacation Research Scholarships are funded jointly by the Department
Representation Learning for Mobile Robots in Dynamic Environments Olivia Michael Supervised by A/Prof. Oliver Obst Western Sydney University Vacation Research Scholarships are funded jointly by the Department
Hierarchical Case-Based Reasoning Behavior Control for Humanoid Robot
 Annals of University of Craiova, Math. Comp. Sci. Ser. Volume 36(2), 2009, Pages 131 140 ISSN: 1223-6934 Hierarchical Case-Based Reasoning Behavior Control for Humanoid Robot Bassant Mohamed El-Bagoury,
Annals of University of Craiova, Math. Comp. Sci. Ser. Volume 36(2), 2009, Pages 131 140 ISSN: 1223-6934 Hierarchical Case-Based Reasoning Behavior Control for Humanoid Robot Bassant Mohamed El-Bagoury,
The future of research on safety and security in Germany - Results from an explorative Delphi study
 Dr. Lars Gerhold Freie Universität Berlin, Research Forum on Public Safety and Security 1 INTRODUCTION AND BACKGROUND Research Program for civil security (Federal Ministry of Education and Research) 123
Dr. Lars Gerhold Freie Universität Berlin, Research Forum on Public Safety and Security 1 INTRODUCTION AND BACKGROUND Research Program for civil security (Federal Ministry of Education and Research) 123
Nao Devils Dortmund. Team Description for RoboCup Stefan Czarnetzki, Gregor Jochmann, and Sören Kerner
 Nao Devils Dortmund Team Description for RoboCup 21 Stefan Czarnetzki, Gregor Jochmann, and Sören Kerner Robotics Research Institute Section Information Technology TU Dortmund University 44221 Dortmund,
Nao Devils Dortmund Team Description for RoboCup 21 Stefan Czarnetzki, Gregor Jochmann, and Sören Kerner Robotics Research Institute Section Information Technology TU Dortmund University 44221 Dortmund,
Nao Devils Dortmund. Team Description for RoboCup 2013
 Nao Devils Dortmund Team Description for RoboCup 2013 Matthias Hofmann, Ingmar Schwarz, Oliver Urbann, Elena Erdmann, Bastian Böhm, and Yuri Struszczynski Robotics Research Institute Section Information
Nao Devils Dortmund Team Description for RoboCup 2013 Matthias Hofmann, Ingmar Schwarz, Oliver Urbann, Elena Erdmann, Bastian Böhm, and Yuri Struszczynski Robotics Research Institute Section Information
Humanoid Robots. by Julie Chambon
 Humanoid Robots by Julie Chambon 25th November 2008 Outlook Introduction Why a humanoid appearance? Particularities of humanoid Robots Utility of humanoid Robots Complexity of humanoids Humanoid projects
Humanoid Robots by Julie Chambon 25th November 2008 Outlook Introduction Why a humanoid appearance? Particularities of humanoid Robots Utility of humanoid Robots Complexity of humanoids Humanoid projects
Keywords: Multi-robot adversarial environments, real-time autonomous robots
 ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
ROBOTSOCCER. Peter Kopacek
 Proceedings of the 17th World Congress The International Federation of Automatic Control ROBOTSOCCER Peter Kopacek Intelligent Handling and Robotics (IHRT),Vienna University of Technology Favoritenstr.
Proceedings of the 17th World Congress The International Federation of Automatic Control ROBOTSOCCER Peter Kopacek Intelligent Handling and Robotics (IHRT),Vienna University of Technology Favoritenstr.
Eleonora Escalante, MBA - MEng Strategic Corporate Advisory Services Creating Corporate Integral Value (CIV)
") Eleonora Escalante, MBA - MEng Strategic Corporate Advisory Services Creating Corporate Integral Value (CIV) Leg 7. Trends in Competitive Advantage. Generation Z is the next guinea pig generation for Industry
Eleonora Escalante, MBA - MEng Strategic Corporate Advisory Services Creating Corporate Integral Value (CIV) Leg 7. Trends in Competitive Advantage. Generation Z is the next guinea pig generation for Industry
RoboCup 2013 Humanoid Kidsize League Winner
 RoboCup 2013 Humanoid Kidsize League Winner Daniel D. Lee, Seung-Joon Yi, Stephen G. McGill, Yida Zhang, Larry Vadakedathu, Samarth Brahmbhatt, Richa Agrawal, and Vibhavari Dasagi GRASP Lab, Engineering
RoboCup 2013 Humanoid Kidsize League Winner Daniel D. Lee, Seung-Joon Yi, Stephen G. McGill, Yida Zhang, Larry Vadakedathu, Samarth Brahmbhatt, Richa Agrawal, and Vibhavari Dasagi GRASP Lab, Engineering
Robot: icub This humanoid helps us study the brain
 ProfileArticle Robot: icub This humanoid helps us study the brain For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-icub/ Program By Robohub Tuesday,
ProfileArticle Robot: icub This humanoid helps us study the brain For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-icub/ Program By Robohub Tuesday,
Concept and Architecture of a Centaur Robot
 Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
Learning and Using Models of Kicking Motions for Legged Robots
 Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
2 Our Hardware Architecture
 RoboCup-99 Team Descriptions Middle Robots League, Team NAIST, pages 170 174 http: /www.ep.liu.se/ea/cis/1999/006/27/ 170 Team Description of the RoboCup-NAIST NAIST Takayuki Nakamura, Kazunori Terada,
RoboCup-99 Team Descriptions Middle Robots League, Team NAIST, pages 170 174 http: /www.ep.liu.se/ea/cis/1999/006/27/ 170 Team Description of the RoboCup-NAIST NAIST Takayuki Nakamura, Kazunori Terada,
Team Description for Humanoid KidSize League of RoboCup Stephen McGill, Seung Joon Yi, Yida Zhang, Aditya Sreekumar, and Professor Dan Lee
 Team DARwIn Team Description for Humanoid KidSize League of RoboCup 2013 Stephen McGill, Seung Joon Yi, Yida Zhang, Aditya Sreekumar, and Professor Dan Lee GRASP Lab School of Engineering and Applied Science,
Team DARwIn Team Description for Humanoid KidSize League of RoboCup 2013 Stephen McGill, Seung Joon Yi, Yida Zhang, Aditya Sreekumar, and Professor Dan Lee GRASP Lab School of Engineering and Applied Science,
The Attempto Tübingen Robot Soccer Team 2006
 The Attempto Tübingen Robot Soccer Team 2006 Patrick Heinemann, Hannes Becker, Jürgen Haase, and Andreas Zell Wilhelm-Schickard-Institute, Department of Computer Architecture, University of Tübingen, Sand
The Attempto Tübingen Robot Soccer Team 2006 Patrick Heinemann, Hannes Becker, Jürgen Haase, and Andreas Zell Wilhelm-Schickard-Institute, Department of Computer Architecture, University of Tübingen, Sand
Humanoid Robot NAO: Developing Behaviors for Football Humanoid Robots
 Humanoid Robot NAO: Developing Behaviors for Football Humanoid Robots State of the Art Presentation Luís Miranda Cruz Supervisors: Prof. Luis Paulo Reis Prof. Armando Sousa Outline 1. Context 1.1. Robocup
Humanoid Robot NAO: Developing Behaviors for Football Humanoid Robots State of the Art Presentation Luís Miranda Cruz Supervisors: Prof. Luis Paulo Reis Prof. Armando Sousa Outline 1. Context 1.1. Robocup
COMP219: Artificial Intelligence. Lecture 2: AI Problems and Applications
 COMP219: Artificial Intelligence Lecture 2: AI Problems and Applications 1 Introduction Last time General module information Characterisation of AI and what it is about Today Overview of some common AI
COMP219: Artificial Intelligence Lecture 2: AI Problems and Applications 1 Introduction Last time General module information Characterisation of AI and what it is about Today Overview of some common AI
Children and Social Robots: An integrative framework
 Children and Social Robots: An integrative framework Jochen Peter Amsterdam School of Communication Research University of Amsterdam (Funded by ERC Grant 682733, CHILDROBOT) Prague, November 2016 Prague,
Children and Social Robots: An integrative framework Jochen Peter Amsterdam School of Communication Research University of Amsterdam (Funded by ERC Grant 682733, CHILDROBOT) Prague, November 2016 Prague,
Concept and Architecture of a Centaur Robot
 Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
Sensor system of a small biped entertainment robot
 Advanced Robotics, Vol. 18, No. 10, pp. 1039 1052 (2004) VSP and Robotics Society of Japan 2004. Also available online - www.vsppub.com Sensor system of a small biped entertainment robot Short paper TATSUZO
Advanced Robotics, Vol. 18, No. 10, pp. 1039 1052 (2004) VSP and Robotics Society of Japan 2004. Also available online - www.vsppub.com Sensor system of a small biped entertainment robot Short paper TATSUZO
Application from Hamburg Bit-Bots for RoboCup 2015
 Application from Hamburg Bit-Bots for RoboCup 2015 Marc Bestmann, Juliane Bödeker, Fabian Fiedler, Timon Giese, Judith Hartfill, Marcel Hellwig, Maxim Holand, Jessica Jobski, Robert Keßler, Maike Paetzel,
Application from Hamburg Bit-Bots for RoboCup 2015 Marc Bestmann, Juliane Bödeker, Fabian Fiedler, Timon Giese, Judith Hartfill, Marcel Hellwig, Maxim Holand, Jessica Jobski, Robert Keßler, Maike Paetzel,
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball
 Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Artificial Intelligence Paper Presentation
 Artificial Intelligence Paper Presentation Human-Level AI s Killer Application Interactive Computer Games By John E.Lairdand Michael van Lent ( 2001 ) Fion Ching Fung Li ( 2010-81329) Content Introduction
Artificial Intelligence Paper Presentation Human-Level AI s Killer Application Interactive Computer Games By John E.Lairdand Michael van Lent ( 2001 ) Fion Ching Fung Li ( 2010-81329) Content Introduction
STOx s 2014 Extended Team Description Paper
 STOx s 2014 Extended Team Description Paper Saith Rodríguez, Eyberth Rojas, Katherín Pérez, Jorge López, Carlos Quintero, and Juan Manuel Calderón Faculty of Electronics Engineering Universidad Santo Tomás
STOx s 2014 Extended Team Description Paper Saith Rodríguez, Eyberth Rojas, Katherín Pérez, Jorge López, Carlos Quintero, and Juan Manuel Calderón Faculty of Electronics Engineering Universidad Santo Tomás
Self-Localization Based on Monocular Vision for Humanoid Robot
 Tamkang Journal of Science and Engineering, Vol. 14, No. 4, pp. 323 332 (2011) 323 Self-Localization Based on Monocular Vision for Humanoid Robot Shih-Hung Chang 1, Chih-Hsien Hsia 2, Wei-Hsuan Chang 1
Tamkang Journal of Science and Engineering, Vol. 14, No. 4, pp. 323 332 (2011) 323 Self-Localization Based on Monocular Vision for Humanoid Robot Shih-Hung Chang 1, Chih-Hsien Hsia 2, Wei-Hsuan Chang 1
MRL Team Description Paper for Humanoid KidSize League of RoboCup 2013
 MRL Team Description Paper for Humanoid KidSize League of RoboCup 2013 Mostafa E. Salehi 1, Reza Safdari, M. Reza Najafipour, Amir Salimi, Mohammad Aghaabbasloo, Erfan Abedi, Roham Shakiba, Meisam Teimouri,
MRL Team Description Paper for Humanoid KidSize League of RoboCup 2013 Mostafa E. Salehi 1, Reza Safdari, M. Reza Najafipour, Amir Salimi, Mohammad Aghaabbasloo, Erfan Abedi, Roham Shakiba, Meisam Teimouri,
RoboPatriots: George Mason University 2014 RoboCup Team
 RoboPatriots: George Mason University 2014 RoboCup Team David Freelan, Drew Wicke, Chau Thai, Joshua Snider, Anna Papadogiannakis, and Sean Luke Department of Computer Science, George Mason University
RoboPatriots: George Mason University 2014 RoboCup Team David Freelan, Drew Wicke, Chau Thai, Joshua Snider, Anna Papadogiannakis, and Sean Luke Department of Computer Science, George Mason University
Autonomous Systems at Gelsenkirchen
 Autonomous Systems at Gelsenkirchen Hartmut Surmann Applied University of Gelsenkirchen, Neidenburgerstr. 43 D-45877 Gelsenkirchen, Germany. hartmut.surmann@fh-gelsenkirchen.de Abstract. This paper describes
Autonomous Systems at Gelsenkirchen Hartmut Surmann Applied University of Gelsenkirchen, Neidenburgerstr. 43 D-45877 Gelsenkirchen, Germany. hartmut.surmann@fh-gelsenkirchen.de Abstract. This paper describes
CITBrains (Kid Size League)
") CITBrains (Kid Size League) Youta Seki 1,Yasuo Hayashibara 1, Hideaki Minakata 1, Kiyoshi Irie 1, Chisato Kasebayashi 1, Ryu Yamamoto 1, Masayuki Ando 1, Yukari Suzuki 1, Moeno Masuda 1, Joshua Supratman
CITBrains (Kid Size League) Youta Seki 1,Yasuo Hayashibara 1, Hideaki Minakata 1, Kiyoshi Irie 1, Chisato Kasebayashi 1, Ryu Yamamoto 1, Masayuki Ando 1, Yukari Suzuki 1, Moeno Masuda 1, Joshua Supratman
TU Graz Robotics Challenge 2017
 1 TU Graz Robotics Challenge W I S S E N T E C H N I K L E I D E N S C H A F T TU Graz Robotics Challenge 2017 www.robotics-challenge.ist.tugraz.at Kick-Off 14.03.2017 u www.tugraz.at 2 Overview Introduction
1 TU Graz Robotics Challenge W I S S E N T E C H N I K L E I D E N S C H A F T TU Graz Robotics Challenge 2017 www.robotics-challenge.ist.tugraz.at Kick-Off 14.03.2017 u www.tugraz.at 2 Overview Introduction
Robo-Erectus Tr-2010 TeenSize Team Description Paper.
 Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
SPQR RoboCup 2016 Standard Platform League Qualification Report
 SPQR RoboCup 2016 Standard Platform League Qualification Report V. Suriani, F. Riccio, L. Iocchi, D. Nardi Dipartimento di Ingegneria Informatica, Automatica e Gestionale Antonio Ruberti Sapienza Università
SPQR RoboCup 2016 Standard Platform League Qualification Report V. Suriani, F. Riccio, L. Iocchi, D. Nardi Dipartimento di Ingegneria Informatica, Automatica e Gestionale Antonio Ruberti Sapienza Università
Growing up with Robots Costa MFM and Fernandes JF
 Growing up with Robots Costa MFM and Fernandes JF Introduction Piaget s theory of cognitive development [1] is considered a fundamental pedagogical tool that in different approaches, educators at different
Growing up with Robots Costa MFM and Fernandes JF Introduction Piaget s theory of cognitive development [1] is considered a fundamental pedagogical tool that in different approaches, educators at different
Birth of An Intelligent Humanoid Robot in Singapore
 Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Making Representations: From Sensation to Perception
 Making Representations: From Sensation to Perception Mary-Anne Williams Innovation and Enterprise Research Lab University of Technology, Sydney Australia Overview Understanding Cognition Understanding
Making Representations: From Sensation to Perception Mary-Anne Williams Innovation and Enterprise Research Lab University of Technology, Sydney Australia Overview Understanding Cognition Understanding
US Darts Masters Training Guide
 Let DartConnect Prepare You for the US Masters! Quickly optimize your practice sessions and hone your game for the real thing. Practice realistic match formats versus challenging competition: Live Opponents
Let DartConnect Prepare You for the US Masters! Quickly optimize your practice sessions and hone your game for the real thing. Practice realistic match formats versus challenging competition: Live Opponents
Using Reactive and Adaptive Behaviors to Play Soccer
 AI Magazine Volume 21 Number 3 (2000) ( AAAI) Articles Using Reactive and Adaptive Behaviors to Play Soccer Vincent Hugel, Patrick Bonnin, and Pierre Blazevic This work deals with designing simple behaviors
AI Magazine Volume 21 Number 3 (2000) ( AAAI) Articles Using Reactive and Adaptive Behaviors to Play Soccer Vincent Hugel, Patrick Bonnin, and Pierre Blazevic This work deals with designing simple behaviors
Cooperative Behavior Acquisition in A Multiple Mobile Robot Environment by Co-evolution
 Cooperative Behavior Acquisition in A Multiple Mobile Robot Environment by Co-evolution Eiji Uchibe, Masateru Nakamura, Minoru Asada Dept. of Adaptive Machine Systems, Graduate School of Eng., Osaka University,
Cooperative Behavior Acquisition in A Multiple Mobile Robot Environment by Co-evolution Eiji Uchibe, Masateru Nakamura, Minoru Asada Dept. of Adaptive Machine Systems, Graduate School of Eng., Osaka University,
CS343 Introduction to Artificial Intelligence Spring 2012
 CS343 Introduction to Artificial Intelligence Spring 2012 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
CS343 Introduction to Artificial Intelligence Spring 2012 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging