Proposal for Robot Assistance for Neurosurgery
|
|
|
- Ethan Waters
- 5 years ago
- Views:
Transcription
1 Proposal for Robot Assistance for Neurosurgery Peter Kazanzides Assistant Research Professor of Computer Science Johns Hopkins University December 13, 2007
2 Funding History Active funding for development of open source software for (medical) robotics: NSF CISST ERC infrastructure ERC Supplement for Surgical Assistant Workstation (with Intuitive Surgical) NSF Major Research Instrumentation (MRI) for sensing, modeling, and manipulation ERC provided seed funding for preliminary work in neurosurgery. SPL contributed resources. Targeting PAR (Collaborations with NCBC): due Jan 17, 2008
 in CT Register CT,")

3 Preliminary Work Use robot assistance to improve safety of skull base drilling: Define safe zone (virtual fixture) in CT Register CT, patient, and robot Robot holds cutting tool Cooperative control: responds to surgeon s forces Virtual fixtures: prevent excursion outside safe zone
4 Prior Work Acrobot Robot for knee surgery Brian Davies, Imperial College, London Virtual fixtures for sinus surgery Li & Taylor, JHU Other robots for skull base surgery Bumm et al., Germany Federspil et al., Germany NeuRobot (Sim et al.), Singapore
")
5 System Architecture Real Time OS (RTAI)
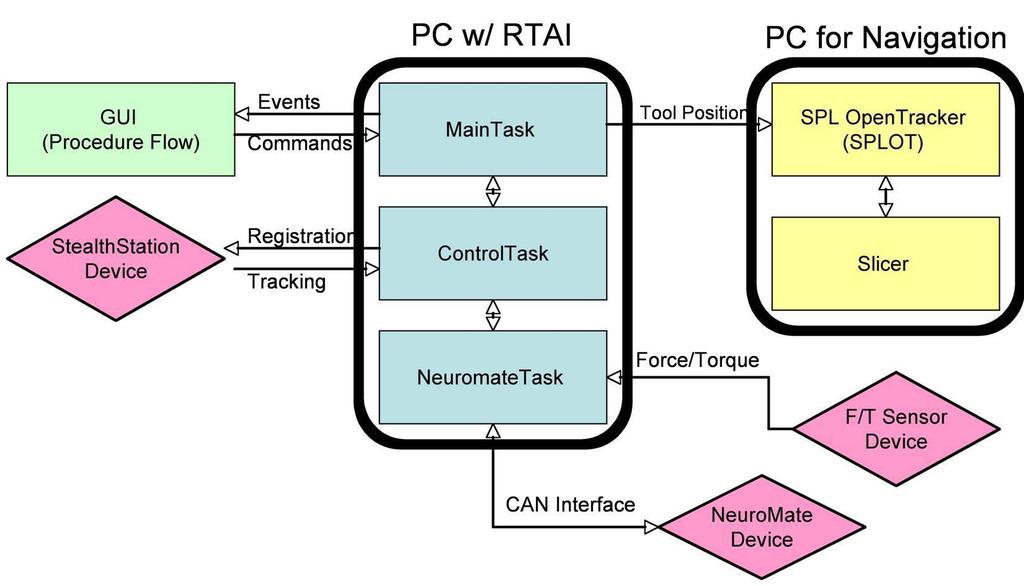
6 Software Architecture
7 Cadaver Experiment


8 Results Phantom experiments with foam blocks to measure accuracy Cadaver experiments to assess clinical feasibility and accuracy
9 Issues Encountered Stability of Slicer 3.0 IGT code Slicer CT coords Stealthstation CT coords Need rastoijk matrix from xml file Interface between robot and Slicer (SPLOT) negatively affected PC performance 2D view does not show tool or VF model Stealthstation showed tool

 Accuracy could be")
10 Issues Encountered Created standalone VTK program to simplify VF and remove section to allow cutter access Too many screens to look at: Robot, Slicer, Stealthstation, endoscope (sometimes) Accuracy could be better (about 1.5 mm)
11 Proposal Goals (1) Preoperative planning Multimodal image fusion (CT, MRI) MRI useful when tool must avoid nerves/vessels that are tethered to skull base Create 3D model of virtual fixture Accounts for cutter radius Simplified for better real-time performance Maybe offset for registration uncertainty?
12 Proposal Goals (2) Intraoperative control Integrate Robot GUI within Slicer Use middleware between Slicer and robot controller (RTOS) Maybe update registration? Intraoperative visualization Dynamically construct and display model of area that has been cut Automatically show surgeon best view Integrate endoscope video Simple interface via pendant (or foot pedal)
13 Proposal Goals (3) Postoperative validation Perform cadaver experiments Align postoperative and preoperative CT Quantify performance of system Key metric is bone overcut Can use DSC (Dice Similarity Coeff), etc. to compare dynamically constructed cut model to postop CT
14 Where are we going? This technology (constrained control with virtual fixtures) is good for bone. Would like to extend to soft tissue (e.g., endoscopic removal of deep brain tumors) Preop virtual fixtures lose relevance Local sensor feedback (OCT, US) can show critical structures around tumor Dynamically construct VF from local sensor feedback? Deform preop VF based on local sensor feedback (including video)?
15 Acknowledgments JHU BWH Tian Xia Clint Baird George Jallo Iulian Iordachita Nobuhiko Hata Kathryn Hayes Nobuyuki Nakajima Haiying Liu NSF EEC NIH 1U41RR A2, NIH P41 RR13218 NIH U54 EB005419
Robots in Image-Guided Interventions
 Robots in Image-Guided Interventions Peter Kazanzides Associate Research Professor Dept. of Computer Science The Johns Hopkins University My Background 1983-1988 Ph.D. EE (Robotics), Brown University 1989-1990
Robots in Image-Guided Interventions Peter Kazanzides Associate Research Professor Dept. of Computer Science The Johns Hopkins University My Background 1983-1988 Ph.D. EE (Robotics), Brown University 1989-1990
Creating an Infrastructure to Address HCMDSS Challenges Introduction Enabling Technologies for Future Medical Devices
 Creating an Infrastructure to Address HCMDSS Challenges Peter Kazanzides and Russell H. Taylor Center for Computer-Integrated Surgical Systems and Technology (CISST ERC) Johns Hopkins University, Baltimore
Creating an Infrastructure to Address HCMDSS Challenges Peter Kazanzides and Russell H. Taylor Center for Computer-Integrated Surgical Systems and Technology (CISST ERC) Johns Hopkins University, Baltimore
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Robots for Medicine and Personal Assistance. Guest lecturer: Ron Alterovitz
 Robots for Medicine and Personal Assistance Guest lecturer: Ron Alterovitz Growth of Robotics Industry Worldwide $70 $56 Market Size (Billions) $42 $28 $14 $0 1995 2000 2005 2010 2015 2020 2025 Source:
Robots for Medicine and Personal Assistance Guest lecturer: Ron Alterovitz Growth of Robotics Industry Worldwide $70 $56 Market Size (Billions) $42 $28 $14 $0 1995 2000 2005 2010 2015 2020 2025 Source:
Robot assisted craniofacial surgery: first clinical evaluation
 Robot assisted craniofacial surgery: first clinical evaluation C. Burghart*, R. Krempien, T. Redlich+, A. Pernozzoli+, H. Grabowski*, J. Muenchenberg*, J. Albers#, S. Haßfeld+, C. Vahl#, U. Rembold*, H.
Robot assisted craniofacial surgery: first clinical evaluation C. Burghart*, R. Krempien, T. Redlich+, A. Pernozzoli+, H. Grabowski*, J. Muenchenberg*, J. Albers#, S. Haßfeld+, C. Vahl#, U. Rembold*, H.
Stereoscopic Augmented Reality System for Computer Assisted Surgery
 Marc Liévin and Erwin Keeve Research center c a e s a r, Center of Advanced European Studies and Research, Surgical Simulation and Navigation Group, Friedensplatz 16, 53111 Bonn, Germany. A first architecture
Marc Liévin and Erwin Keeve Research center c a e s a r, Center of Advanced European Studies and Research, Surgical Simulation and Navigation Group, Friedensplatz 16, 53111 Bonn, Germany. A first architecture
Robots in the Field of Medicine
 Robots in the Field of Medicine Austin Gillis and Peter Demirdjian Malden Catholic High School 1 Pioneers Robots in the Field of Medicine The use of robots in medicine is where it is today because of four
Robots in the Field of Medicine Austin Gillis and Peter Demirdjian Malden Catholic High School 1 Pioneers Robots in the Field of Medicine The use of robots in medicine is where it is today because of four
HUMAN Robot Cooperation Techniques in Surgery
 HUMAN Robot Cooperation Techniques in Surgery Alícia Casals Institute for Bioengineering of Catalonia (IBEC), Universitat Politècnica de Catalunya (UPC), Barcelona, Spain alicia.casals@upc.edu Keywords:
HUMAN Robot Cooperation Techniques in Surgery Alícia Casals Institute for Bioengineering of Catalonia (IBEC), Universitat Politècnica de Catalunya (UPC), Barcelona, Spain alicia.casals@upc.edu Keywords:
Feasibility of photoacoustic image guidance for telerobotic endonasal transsphenoidal surgery
 Feasibility of photoacoustic image guidance for telerobotic endonasal transsphenoidal surgery Sungmin Kim, Youri Tan, Peter Kazanzides, and Muyinatu A. Lediju Bell Abstract Injury to the internal carotid
Feasibility of photoacoustic image guidance for telerobotic endonasal transsphenoidal surgery Sungmin Kim, Youri Tan, Peter Kazanzides, and Muyinatu A. Lediju Bell Abstract Injury to the internal carotid
ERC: Engineering Research Center for Computer- Integrated Surgical Systems and Technology (NSF Grant # )
") ERC: Engineering Research Center for Computer- Integrated Surgical Systems and Technology (NSF Grant #9731748) MARCIN BALICKI 1, and TIAN XIA 2 1,2 Johns Hopkins University, 3400 Charles St., Baltimore,
ERC: Engineering Research Center for Computer- Integrated Surgical Systems and Technology (NSF Grant #9731748) MARCIN BALICKI 1, and TIAN XIA 2 1,2 Johns Hopkins University, 3400 Charles St., Baltimore,
Virtual and Augmented Reality techniques embedded and based on a Operative Microscope. Training for Neurosurgery.
 Virtual and Augmented Reality techniques embedded and based on a Operative Microscope. Training for Neurosurgery. 1 M. Aschke 1, M.Ciucci 1,J.Raczkowsky 1, R.Wirtz 2, H. Wörn 1 1 IPR, Institute for Process
Virtual and Augmented Reality techniques embedded and based on a Operative Microscope. Training for Neurosurgery. 1 M. Aschke 1, M.Ciucci 1,J.Raczkowsky 1, R.Wirtz 2, H. Wörn 1 1 IPR, Institute for Process
Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor
 Bogdan M. Maris, PhD Temporary Assistant Professor") Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor E-mail bogdan.maris@univr.it Medical Robotics History, current and future applications Robots are Accurate
Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor E-mail bogdan.maris@univr.it Medical Robotics History, current and future applications Robots are Accurate
Telemanipulation and Telestration for Microsurgery Summary
 Telemanipulation and Telestration for Microsurgery Summary Microsurgery presents an array of problems. For instance, current methodologies of Eye Surgery requires freehand manipulation of delicate structures
Telemanipulation and Telestration for Microsurgery Summary Microsurgery presents an array of problems. For instance, current methodologies of Eye Surgery requires freehand manipulation of delicate structures
Current Status and Future of Medical Virtual Reality
 2011.08.16 Medical VR Current Status and Future of Medical Virtual Reality Naoto KUME, Ph.D. Assistant Professor of Kyoto University Hospital 1. History of Medical Virtual Reality Virtual reality (VR)
2011.08.16 Medical VR Current Status and Future of Medical Virtual Reality Naoto KUME, Ph.D. Assistant Professor of Kyoto University Hospital 1. History of Medical Virtual Reality Virtual reality (VR)
Computer Assisted Abdominal
 Computer Assisted Abdominal Surgery and NOTES Prof. Luc Soler, Prof. Jacques Marescaux University of Strasbourg, France In the past IRCAD Strasbourg + Taiwain More than 3.000 surgeons trained per year,,
Computer Assisted Abdominal Surgery and NOTES Prof. Luc Soler, Prof. Jacques Marescaux University of Strasbourg, France In the past IRCAD Strasbourg + Taiwain More than 3.000 surgeons trained per year,,
Scopis Hybrid Navigation with Augmented Reality
 Scopis Hybrid Navigation with Augmented Reality Intelligent navigation systems for head surgery www.scopis.com Scopis Hybrid Navigation One System. Optical and electromagnetic measurement technology. As
Scopis Hybrid Navigation with Augmented Reality Intelligent navigation systems for head surgery www.scopis.com Scopis Hybrid Navigation One System. Optical and electromagnetic measurement technology. As
THE USE OF OPEN REDUCtion
 ORIGINAL ARTICLE Comparison of 3 Optical Navigation Systems for Computer-Aided Maxillofacial Surgery E. Bradley Strong, MD; Amir Rafii, MD; Bettina Holhweg-Majert, MD, DMD; Scott C. Fuller, MD; Marc Christian
ORIGINAL ARTICLE Comparison of 3 Optical Navigation Systems for Computer-Aided Maxillofacial Surgery E. Bradley Strong, MD; Amir Rafii, MD; Bettina Holhweg-Majert, MD, DMD; Scott C. Fuller, MD; Marc Christian
Surgical Robot Competition Introducing Engineering in Medicine to Pre-college Students
 Session 2793 Surgical Robot Competition Introducing Engineering in Medicine to Pre-college Students Oleg Gerovichev, Randal P. Goldberg, Ian D. Donn, Anand Viswanathan, Russell H. Taylor Department of
Session 2793 Surgical Robot Competition Introducing Engineering in Medicine to Pre-college Students Oleg Gerovichev, Randal P. Goldberg, Ian D. Donn, Anand Viswanathan, Russell H. Taylor Department of
NeuroSim - The Prototype of a Neurosurgical Training Simulator
 NeuroSim - The Prototype of a Neurosurgical Training Simulator Florian BEIER a,1,stephandiederich a,kirstenschmieder b and Reinhard MÄNNER a,c a Institute for Computational Medicine, University of Heidelberg
NeuroSim - The Prototype of a Neurosurgical Training Simulator Florian BEIER a,1,stephandiederich a,kirstenschmieder b and Reinhard MÄNNER a,c a Institute for Computational Medicine, University of Heidelberg
Surgical Assist Devices & Systems aka Surgical Robots
 Surgical Assist Devices & Systems aka Surgical Robots D. J. McMahon 150125 rev cewood 2018-01-19 Key Points Surgical Assist Devices & Systems: Understand why the popular name robot isn t accurate for Surgical
Surgical Assist Devices & Systems aka Surgical Robots D. J. McMahon 150125 rev cewood 2018-01-19 Key Points Surgical Assist Devices & Systems: Understand why the popular name robot isn t accurate for Surgical
TREND OF SURGICAL ROBOT TECHNOLOGY AND ITS INDUSTRIAL OUTLOOK
 TREND OF SURGICAL ROBOT TECHNOLOGY AND ITS INDUSTRIAL OUTLOOK BYUNG-JU YI Electronic Systems Engineering Department, Hanyang University, Korea E-mail: bj@hanyang.ac.kr Abstract - Since the launch of the
TREND OF SURGICAL ROBOT TECHNOLOGY AND ITS INDUSTRIAL OUTLOOK BYUNG-JU YI Electronic Systems Engineering Department, Hanyang University, Korea E-mail: bj@hanyang.ac.kr Abstract - Since the launch of the
Author Manuscript Int J Comput Assist Radiol Surg. Author manuscript; available in PMC 2016 March 01.
 NIH Public Access Author Manuscript Published in final edited form as: Int J Comput Assist Radiol Surg. 2015 March ; 10(3): 285 292. doi:10.1007/s11548-014-1081-1. OpenIGTLink interface for state control
NIH Public Access Author Manuscript Published in final edited form as: Int J Comput Assist Radiol Surg. 2015 March ; 10(3): 285 292. doi:10.1007/s11548-014-1081-1. OpenIGTLink interface for state control
Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO
 Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO Weimin Huang 1, Tao Yang 1, Liang Jing Yang 2, Chee Kong Chui 2, Jimmy Liu 1, Jiayin Zhou 1, Jing Zhang 1, Yi Su 3, Stephen
Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO Weimin Huang 1, Tao Yang 1, Liang Jing Yang 2, Chee Kong Chui 2, Jimmy Liu 1, Jiayin Zhou 1, Jing Zhang 1, Yi Su 3, Stephen
3D Slicer Based Surgical Robot Console System Release 0.00
 3D Slicer Based Surgical Robot Console System Release 0.00 Atsushi Yamada 1, Kento Nishibori 1, Yuichiro Hayashi 2, Junichi Tokuda 3, Nobuhiko Hata 3, Kiyoyuki Chinzei 4, and Hideo Fujimoto 1 August 16,
3D Slicer Based Surgical Robot Console System Release 0.00 Atsushi Yamada 1, Kento Nishibori 1, Yuichiro Hayashi 2, Junichi Tokuda 3, Nobuhiko Hata 3, Kiyoyuki Chinzei 4, and Hideo Fujimoto 1 August 16,
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery
 Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Control design issues for a microinvasive neurosurgery teleoperator system
 Control design issues for a microinvasive neurosurgery teleoperator system Jacopo Semmoloni, Rudy Manganelli, Alessandro Formaglio and Domenico Prattichizzo Abstract This paper deals with controller design
Control design issues for a microinvasive neurosurgery teleoperator system Jacopo Semmoloni, Rudy Manganelli, Alessandro Formaglio and Domenico Prattichizzo Abstract This paper deals with controller design
Università di Roma La Sapienza. Medical Robotics. A Teleoperation System for Research in MIRS. Marilena Vendittelli
 Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Haptic Feedback in Laparoscopic and Robotic Surgery
 Haptic Feedback in Laparoscopic and Robotic Surgery Dr. Warren Grundfest Professor Bioengineering, Electrical Engineering & Surgery UCLA, Los Angeles, California Acknowledgment This Presentation & Research
Haptic Feedback in Laparoscopic and Robotic Surgery Dr. Warren Grundfest Professor Bioengineering, Electrical Engineering & Surgery UCLA, Los Angeles, California Acknowledgment This Presentation & Research
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS
 FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
BodyViz fact sheet. BodyViz 2321 North Loop Drive, Suite 110 Ames, IA x555 www. bodyviz.com
 BodyViz fact sheet BodyViz, the company, was established in 2007 at the Iowa State University Research Park in Ames, Iowa. It was created by ISU s Virtual Reality Applications Center Director James Oliver,
BodyViz fact sheet BodyViz, the company, was established in 2007 at the Iowa State University Research Park in Ames, Iowa. It was created by ISU s Virtual Reality Applications Center Director James Oliver,
Chapter 1. Introduction
 Chapter 1 Introduction Robotics technology has recently found extensive use in surgical and therapeutic procedures. The purpose of this chapter is to give an overview of the robotic tools which may be
Chapter 1 Introduction Robotics technology has recently found extensive use in surgical and therapeutic procedures. The purpose of this chapter is to give an overview of the robotic tools which may be
Harvard BioRobotics Laboratory Technical Report
 Harvard BioRobotics Laboratory Technical Report December 2 Virtual Fixtures for Robotic Endoscopic Surgery Fuji Lai & Robert D. Howe Division of Engineering and Applied Sciences Harvard University 323
Harvard BioRobotics Laboratory Technical Report December 2 Virtual Fixtures for Robotic Endoscopic Surgery Fuji Lai & Robert D. Howe Division of Engineering and Applied Sciences Harvard University 323
Job Description. Commitment: Must be available to work full-time hours, M-F for weeks beginning Summer of 2018.
 Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Robone: Next Generation Orthopedic Surgical Device Final Report
 Robone: Next Generation Orthopedic Surgical Device Final Report Team Members Andrew Hundt Alex Strickland Shahriar Sefati Mentors Prof. Peter Kazanzides (Prof. Taylor) Background: Total hip replacement
Robone: Next Generation Orthopedic Surgical Device Final Report Team Members Andrew Hundt Alex Strickland Shahriar Sefati Mentors Prof. Peter Kazanzides (Prof. Taylor) Background: Total hip replacement
DART-FIRE. Small Screw System SURGICAL TECHNIQUE
 DART-FIRE Small Screw System SURGICAL TECHNIQUE DART-FIRE Small Screw System Surgical Technique Contents Chapter 1 4 Chapter 2 6 Chapter 3 7 Appendix 1 10 Appendix 2 12 Introduction Intended Use DART-FIRE
DART-FIRE Small Screw System SURGICAL TECHNIQUE DART-FIRE Small Screw System Surgical Technique Contents Chapter 1 4 Chapter 2 6 Chapter 3 7 Appendix 1 10 Appendix 2 12 Introduction Intended Use DART-FIRE
5HDO 7LPH 6XUJLFDO 6LPXODWLRQ ZLWK +DSWLF 6HQVDWLRQ DV &ROODERUDWHG :RUNV EHWZHHQ -DSDQ DQG *HUPDQ\
 nsuzuki@jikei.ac.jp 1016 N. Suzuki et al. 1). The system should provide a design for the user and determine surgical procedures based on 3D model reconstructed from the patient's data. 2). The system must
nsuzuki@jikei.ac.jp 1016 N. Suzuki et al. 1). The system should provide a design for the user and determine surgical procedures based on 3D model reconstructed from the patient's data. 2). The system must
CETRA ANTERIOR CERVICAL PLATE
 CETRA TM ANTERIOR CERVICAL PLATE The CETRA Anterior Cervical Plate System offers a low profile titanium alloy plate with an intuitive locking mechanism, large graft windows, a high degree of screw angulation
CETRA TM ANTERIOR CERVICAL PLATE The CETRA Anterior Cervical Plate System offers a low profile titanium alloy plate with an intuitive locking mechanism, large graft windows, a high degree of screw angulation
The Trend of Medical Image Work Station
 The Trend of Medical Image Work Station Abstract Image Work Station has rapidly improved its efficiency and its quality along the development of biomedical engineering. The quality improvement of image
The Trend of Medical Image Work Station Abstract Image Work Station has rapidly improved its efficiency and its quality along the development of biomedical engineering. The quality improvement of image
Medical Robotics Overview of the course
 Medical Robotics Overview of the course September 2017 Guillaume.Morel@upmc.fr Professor in Robotics @ ISIR, UPMC Head of AGATHE, INSERM U1150 Director of Carnot Interfaces Co-founder of GEMA Scope Although
Medical Robotics Overview of the course September 2017 Guillaume.Morel@upmc.fr Professor in Robotics @ ISIR, UPMC Head of AGATHE, INSERM U1150 Director of Carnot Interfaces Co-founder of GEMA Scope Although
Distributed Modular Computer-Integrated Surgical Robotic Systems:
 Distributed Modular Computer-Integrated Surgical Robotic Systems: Implementation using Modular Software and Networked Systems Andrew Bzostek 1,4, Rajesh Kumar 1,4, Nobuhiko Hata 2,4, Oliver Schorr 2,3,4,
Distributed Modular Computer-Integrated Surgical Robotic Systems: Implementation using Modular Software and Networked Systems Andrew Bzostek 1,4, Rajesh Kumar 1,4, Nobuhiko Hata 2,4, Oliver Schorr 2,3,4,
Open surgery SIMULATION
 Open surgery SIMULATION ossimtech.com A note from the President and Co-Founder, Mr. André Blain Medical education and surgical training are going through exciting changes these days. Fast-paced innovation
Open surgery SIMULATION ossimtech.com A note from the President and Co-Founder, Mr. André Blain Medical education and surgical training are going through exciting changes these days. Fast-paced innovation
Augmented Reality in Medicine
 Review Augmented Reality in Medicine https://doi.org/10.7599/hmr.2016.36.4.242 pissn 1738-429X eissn 2234-4446 Ho-Gun Ha, Jaesung Hong Department of Robotics Engineering, Daegu Gyeongbuk Institute of Science
Review Augmented Reality in Medicine https://doi.org/10.7599/hmr.2016.36.4.242 pissn 1738-429X eissn 2234-4446 Ho-Gun Ha, Jaesung Hong Department of Robotics Engineering, Daegu Gyeongbuk Institute of Science
DEVELOPING SENSORS FOR SURGERY SUPPORT ROBOTS Mona Kudo
 DEVELOPING SENSORS FOR SURGERY SUPPORT ROBOTS 20328 Mona Kudo 1. INTRODUCTION Today, many kinds of surgery support robots are used in medical procedures all over economically advanced countries such as
DEVELOPING SENSORS FOR SURGERY SUPPORT ROBOTS 20328 Mona Kudo 1. INTRODUCTION Today, many kinds of surgery support robots are used in medical procedures all over economically advanced countries such as
Robotic System Simulation and Modeling Stefan Jörg Robotic and Mechatronic Center
 Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Methods for Haptic Feedback in Teleoperated Robotic Surgery
 Young Group 5 1 Methods for Haptic Feedback in Teleoperated Robotic Surgery Paper Review Jessie Young Group 5: Haptic Interface for Surgical Manipulator System March 12, 2012 Paper Selection: A. M. Okamura.
Young Group 5 1 Methods for Haptic Feedback in Teleoperated Robotic Surgery Paper Review Jessie Young Group 5: Haptic Interface for Surgical Manipulator System March 12, 2012 Paper Selection: A. M. Okamura.
NIH Public Access Author Manuscript Int J Comput Assist Radiol Surg. Author manuscript; available in PMC 2010 August 23.
 NIH Public Access Author Manuscript Published in final edited form as: Int J Comput Assist Radiol Surg. 2010 May ; 5(3): 211 220. doi:10.1007/s11548-009-0388-9. Open core control software for surgical
NIH Public Access Author Manuscript Published in final edited form as: Int J Comput Assist Radiol Surg. 2010 May ; 5(3): 211 220. doi:10.1007/s11548-009-0388-9. Open core control software for surgical
Two decades after the first reported robotic surgical
 EYEWIRE Surgical and Interventional Robotics Core Concepts, Technology, and Design BY PETER KAZANZIDES, GABOR FICHTINGER, GREGORY D. HAGER, ALLISON M. OKAMURA, LOUIS L. WHITCOMB, AND RUSSELL H. TAYLOR
EYEWIRE Surgical and Interventional Robotics Core Concepts, Technology, and Design BY PETER KAZANZIDES, GABOR FICHTINGER, GREGORY D. HAGER, ALLISON M. OKAMURA, LOUIS L. WHITCOMB, AND RUSSELL H. TAYLOR
Maneesh Dewan. Prepared on: April 11, 2007
 Maneesh Dewan maneesh@cs.jhu.edu www.cs.jhu.edu/~maneesh 307, E. University Parkway, 3400 N. Charles Street, Baltimore, MD 21218. NEB B28, Baltimore, MD 21218. Phone: (410) 900 8804 (C) Phone: (410) 516
Maneesh Dewan maneesh@cs.jhu.edu www.cs.jhu.edu/~maneesh 307, E. University Parkway, 3400 N. Charles Street, Baltimore, MD 21218. NEB B28, Baltimore, MD 21218. Phone: (410) 900 8804 (C) Phone: (410) 516
OsteoBridge IKA Intramedullary Knee Arthrodesis Fixation System. From the «BioBall Company» OsteoBridge Family
 From the «BioBall Company» OsteoBridge Family OsteoBridge IKA Intramedullary Knee Arthrodesis Fixation System The modular system for the fixation of the knee joint 01. OsteoBridge IKA The OsteoBridge IKA
From the «BioBall Company» OsteoBridge Family OsteoBridge IKA Intramedullary Knee Arthrodesis Fixation System The modular system for the fixation of the knee joint 01. OsteoBridge IKA The OsteoBridge IKA
Fracture fixation providing absolute or relative stability, as required by the personality of the fracture, the patient, and the injury.
 Course program AOCMF Advanced Innovations Symposium & Workshop on Technological Advances in Head and Neck and Craniofacial Surgery December 8-11, 2011, Bangalore, India Our mission is to continuously set
Course program AOCMF Advanced Innovations Symposium & Workshop on Technological Advances in Head and Neck and Craniofacial Surgery December 8-11, 2011, Bangalore, India Our mission is to continuously set
MEDIALMAX System SURGICAL TECHNIQUE
 MAXLOCK EXTREME MEDIALMAX System SURGICAL TECHNIQUE Contents The MEDIALMAX Advantage Design Feature Various flex options POCKETLOCK Technology Anatomic design Advantage Provides the surgeon with multiple
MAXLOCK EXTREME MEDIALMAX System SURGICAL TECHNIQUE Contents The MEDIALMAX Advantage Design Feature Various flex options POCKETLOCK Technology Anatomic design Advantage Provides the surgeon with multiple
Using virtual reality for medical diagnosis, training and education
 Using virtual reality for medical diagnosis, training and education A H Al-khalifah 1, R J McCrindle 1, P M Sharkey 1 and V N Alexandrov 2 1 School of Systems Engineering, the University of Reading, Whiteknights,
Using virtual reality for medical diagnosis, training and education A H Al-khalifah 1, R J McCrindle 1, P M Sharkey 1 and V N Alexandrov 2 1 School of Systems Engineering, the University of Reading, Whiteknights,
Novel machine interface for scaled telesurgery
 Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
A Virtual Interactive Navigation System for Orthopaedic Surgical Interventions
 A Virtual Interactive Navigation System for Orthopaedic Surgical Interventions Taruna Seth Vipin Chaudhary Cathy Buyea Lawrence Bone Department of Computer Science and Engineering University at Buffalo,
A Virtual Interactive Navigation System for Orthopaedic Surgical Interventions Taruna Seth Vipin Chaudhary Cathy Buyea Lawrence Bone Department of Computer Science and Engineering University at Buffalo,
Haptic Virtual Fixtures for Robot-Assisted Manipulation
 Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
From the «BioBall Company» OsteoBridge Family. OsteoBridge Knee Arthrodesis. The modular system for the fusion of the knee joint
 From the «BioBall Company» OsteoBridge Family OsteoBridge Knee Arthrodesis The modular system for the fusion of the knee joint OsteoBridge Knee Arthrodesis System 01. OsteoBridge Knee Arthrodesis The OsteoBridge
From the «BioBall Company» OsteoBridge Family OsteoBridge Knee Arthrodesis The modular system for the fusion of the knee joint OsteoBridge Knee Arthrodesis System 01. OsteoBridge Knee Arthrodesis The OsteoBridge
SpeedTip CCS 5.0, 7.0
 SURGICAL TECHNIQUE STEP BY STEP SpeedTip CCS 5.0, 7.0 Cannulated Compression Screws APTUS 2 SpeedTip CCS 5.0, 7.0 Cannulated Compression Screws Contents 3 Introduction Product Materials Indications Contraindications
SURGICAL TECHNIQUE STEP BY STEP SpeedTip CCS 5.0, 7.0 Cannulated Compression Screws APTUS 2 SpeedTip CCS 5.0, 7.0 Cannulated Compression Screws Contents 3 Introduction Product Materials Indications Contraindications
Aesculap Bone Flap Fixation
 Aesculap Bone Flap Fixation CranioFix 2 CranioFix absorbable CranioFix PEEK CranioPlate Aesculap Neurosurgery CranioFix PEEK CranioPlate CranioFix absorbable CranioFix 2 2 Aesculap Bone Flap Fixation Aesculap
Aesculap Bone Flap Fixation CranioFix 2 CranioFix absorbable CranioFix PEEK CranioPlate Aesculap Neurosurgery CranioFix PEEK CranioPlate CranioFix absorbable CranioFix 2 2 Aesculap Bone Flap Fixation Aesculap
DART-FIRE. Small Screw System SURGIC A L T ECHNIQUE
 DART-FIRE Small Screw System SURGIC A L T ECHNIQUE Contents Headline Headline PREFACE Chapter 1 4 Chapter 2 6 Chapter 3 7 Appendix A 10 Appendix B 12 Introduction Intended Use DART-FIRE Small Screw System
DART-FIRE Small Screw System SURGIC A L T ECHNIQUE Contents Headline Headline PREFACE Chapter 1 4 Chapter 2 6 Chapter 3 7 Appendix A 10 Appendix B 12 Introduction Intended Use DART-FIRE Small Screw System
Summer Engineering Research Internship for US Students (SERIUS) Department of Biomedical Engineering. (www.bioeng.nus.edu.
 Department of Biomedical Engineering. (www.bioeng.nus.edu.") Summer Engineering Research Internship for US Students (SERIUS) Host Department: Department of Biomedical Engineering (www.bioeng.nus.edu.sg) BME Project 1 Host department Department of Biomedical Engineering
Summer Engineering Research Internship for US Students (SERIUS) Host Department: Department of Biomedical Engineering (www.bioeng.nus.edu.sg) BME Project 1 Host department Department of Biomedical Engineering
EnFocus Your Upgrade Path to High Performance Intrasurgical OCT
 Your Upgrade Path to High Performance Intrasurgical OCT is FDA 510(k) Cleared > Ultra HD OCT extends your microscope s potential with intrasurgical OCT BRILLIANT IMAGES, SUB-SURFACE KNOWLEDGE is an intrasurgical
Your Upgrade Path to High Performance Intrasurgical OCT is FDA 510(k) Cleared > Ultra HD OCT extends your microscope s potential with intrasurgical OCT BRILLIANT IMAGES, SUB-SURFACE KNOWLEDGE is an intrasurgical
Using Web-Based Computer Graphics to Teach Surgery
 Using Web-Based Computer Graphics to Teach Surgery Ken Brodlie Nuha El-Khalili Ying Li School of Computer Studies University of Leeds Position Paper for GVE99, Coimbra, Portugal Surgical Training Surgical
Using Web-Based Computer Graphics to Teach Surgery Ken Brodlie Nuha El-Khalili Ying Li School of Computer Studies University of Leeds Position Paper for GVE99, Coimbra, Portugal Surgical Training Surgical
Guide to the Records of Think Surgical, Inc.
 Guide to the Alison Oswald 2016 Archives Center, National Museum of American History P.O. Box 37012 Suite 1100, MRC 601 Washington, D.C. 20013-7012 archivescenter@si.edu http://americanhistory.si.edu/archives
Guide to the Alison Oswald 2016 Archives Center, National Museum of American History P.O. Box 37012 Suite 1100, MRC 601 Washington, D.C. 20013-7012 archivescenter@si.edu http://americanhistory.si.edu/archives
Medical Robotics in Computer-Integrated Surgery
 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 19, NO. 5, OCTOBER 2003 765 Medical Robotics in Computer-Integrated Surgery Russell H. Taylor, Fellow, IEEE, and Dan Stoianovici Abstract This paper provides
IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 19, NO. 5, OCTOBER 2003 765 Medical Robotics in Computer-Integrated Surgery Russell H. Taylor, Fellow, IEEE, and Dan Stoianovici Abstract This paper provides
Arthrex. Bio-Compression. Screw System. Knee OCD. Hand, Wrist & Elbow. Foot & Ankle
 Arthrex Bio-Compression Screw System Knee OCD Hand, Wrist & Elbow Foot & Ankle Bio-Compression Screw System Bio-Compression Screws are versatile and may be used to treat a broad range of indications in
Arthrex Bio-Compression Screw System Knee OCD Hand, Wrist & Elbow Foot & Ankle Bio-Compression Screw System Bio-Compression Screws are versatile and may be used to treat a broad range of indications in
TO EXPLORE THE POSSIBILITIES OF VIRTUAL REALITY (VR) & AUGMENTED REALITY (AR)
 & AUGMENTED REALITY (AR)") TO EXPLORE THE POSSIBILITIES OF VIRTUAL REALITY (VR) & AUGMENTED REALITY (AR) Dr. Robbie K. Melton Associate Vice Chancellor Emerging Technologies Tennessee Board of Regents USA 10 Industries that are
TO EXPLORE THE POSSIBILITIES OF VIRTUAL REALITY (VR) & AUGMENTED REALITY (AR) Dr. Robbie K. Melton Associate Vice Chancellor Emerging Technologies Tennessee Board of Regents USA 10 Industries that are
DART-FIRE. Small Screw System SURGICAL TECHNIQUE
 DART-FIRE Small Screw System SURGICAL TECHNIQUE DART-FIRE Small Screw System SURGICAL TECHNIQUE Contents Chapter 1 4 Chapter 2 6 Appendix 1 9 Appendix 2 11 Introduction DART-FIRE Small Screw System Surgical
DART-FIRE Small Screw System SURGICAL TECHNIQUE DART-FIRE Small Screw System SURGICAL TECHNIQUE Contents Chapter 1 4 Chapter 2 6 Appendix 1 9 Appendix 2 11 Introduction DART-FIRE Small Screw System Surgical
ACTIVE, A PLATFORM FOR BUILDING INTELLIGENT OPERATING ROOMS
 ACTIVE, A PLATFORM FOR BUILDING INTELLIGENT OPERATING ROOMS D. GUZZONI 1, C. BAUR 1, A. CHEYER 2 1 VRAI Group EPFL 1015 Lausanne Switzerland 2 AIC SRI International Menlo Park, CA USA Today computers are
ACTIVE, A PLATFORM FOR BUILDING INTELLIGENT OPERATING ROOMS D. GUZZONI 1, C. BAUR 1, A. CHEYER 2 1 VRAI Group EPFL 1015 Lausanne Switzerland 2 AIC SRI International Menlo Park, CA USA Today computers are
THE SMITH AND NEPHEW ANNUAL LECTURE. ROBOTIC SURGERY: FROM AUTONOMOUS SYSTEMS TO INTELLIGENT TOOLS. PROFESSOR BRIAN DAVIES. IMPERIAL COLLEGE LONDON.
 THE SMITH AND NEPHEW ANNUAL LECTURE. ROBOTIC SURGERY: FROM AUTONOMOUS SYSTEMS TO INTELLIGENT TOOLS. PROFESSOR BRIAN DAVIES. IMPERIAL COLLEGE LONDON. INTRODUCTION In recent years Medical Robotics has seen
THE SMITH AND NEPHEW ANNUAL LECTURE. ROBOTIC SURGERY: FROM AUTONOMOUS SYSTEMS TO INTELLIGENT TOOLS. PROFESSOR BRIAN DAVIES. IMPERIAL COLLEGE LONDON. INTRODUCTION In recent years Medical Robotics has seen
Through the range of motion with NAVIO Instructional course
 Enabling robotic-assisted technologies arthoplasty Through the range of motion with NAVIO Instructional course Preliminary programme Invited chairman: Prof Sébastien Lustig (France) Expert Connect Centre,
Enabling robotic-assisted technologies arthoplasty Through the range of motion with NAVIO Instructional course Preliminary programme Invited chairman: Prof Sébastien Lustig (France) Expert Connect Centre,
Surgical robot simulation with BBZ console
 Review Article on Thoracic Surgery Surgical robot simulation with BBZ console Francesco Bovo 1, Giacomo De Rossi 2, Francesco Visentin 2,3 1 BBZ srl, Verona, Italy; 2 Department of Computer Science, Università
Review Article on Thoracic Surgery Surgical robot simulation with BBZ console Francesco Bovo 1, Giacomo De Rossi 2, Francesco Visentin 2,3 1 BBZ srl, Verona, Italy; 2 Department of Computer Science, Università
MatrixMANDIBLE Preformed Reconstruction Plates. Preshaped to the mandibular anatomy.
 MatrixMANDIBLE Preformed Reconstruction Plates. Preshaped to the mandibular anatomy. Technique Guide CMF Matrix Table of Contents Introduction MatrixMANDIBLE Preformed Reconstruction Plates 2 AO Principles
MatrixMANDIBLE Preformed Reconstruction Plates. Preshaped to the mandibular anatomy. Technique Guide CMF Matrix Table of Contents Introduction MatrixMANDIBLE Preformed Reconstruction Plates 2 AO Principles
Reflex Hybrid System Overview
 Spine Reflex Hybrid System Overview Anterior Cervical Plating System Introduction The Reflex Hybrid ACP System offers a low-profile anterior cervical plate along with a selection of bone screw types to
Spine Reflex Hybrid System Overview Anterior Cervical Plating System Introduction The Reflex Hybrid ACP System offers a low-profile anterior cervical plate along with a selection of bone screw types to
5th Metatarsal Fracture System Surgical Technique
 5th Metatarsal Fracture System Surgical Technique 5th Metatarsal Fracture System 5th Metatarsal Fracture System The 5th Metatarsal Fracture System (AR-8956S) is a uniquely designed screw and plate system
5th Metatarsal Fracture System Surgical Technique 5th Metatarsal Fracture System 5th Metatarsal Fracture System The 5th Metatarsal Fracture System (AR-8956S) is a uniquely designed screw and plate system
Reflex TM Surgical Technique. Anterior Cervical Plate
 Reflex TM Surgical Technique Anterior Cervical Plate Surgical Technique Acknowledgement: Stryker Spine extends their thanks to the following surgeons for their participation in the development of the Reflex
Reflex TM Surgical Technique Anterior Cervical Plate Surgical Technique Acknowledgement: Stryker Spine extends their thanks to the following surgeons for their participation in the development of the Reflex
Surgical navigation display system using volume rendering of intraoperatively scanned CT images
 Computer Aided Surgery, September 2006; 11(5): 240 246 BIOMEDICAL PAPER Surgical navigation display system using volume rendering of intraoperatively scanned CT images MITSUHIRO HAYASHIBE 1, NAOKI SUZUKI
Computer Aided Surgery, September 2006; 11(5): 240 246 BIOMEDICAL PAPER Surgical navigation display system using volume rendering of intraoperatively scanned CT images MITSUHIRO HAYASHIBE 1, NAOKI SUZUKI
Cerclage Passer. For minimally invasive application of cerclage cables.
 Cerclage Passer. For minimally invasive application of cerclage cables. Handling Technique Cable application This publication is not intended for distribution in the USA. Instruments and implants approved
Cerclage Passer. For minimally invasive application of cerclage cables. Handling Technique Cable application This publication is not intended for distribution in the USA. Instruments and implants approved
Cooperative Robot Assistant for Retinal Microsurgery
 Cooperative Robot Assistant for Retinal Microsurgery Ioana Fleming 1,1, Marcin Balicki 1, John Koo 2, Iulian Iordachita 1, Ben Mitchell 1, James Handa 2, Gregory Hager 1 and Russell Taylor 1 1 ERC for
Cooperative Robot Assistant for Retinal Microsurgery Ioana Fleming 1,1, Marcin Balicki 1, John Koo 2, Iulian Iordachita 1, Ben Mitchell 1, James Handa 2, Gregory Hager 1 and Russell Taylor 1 1 ERC for
Bio-Compression. Arthrex. Screw System
 Bio-Compression Arthrex Screw System Ordering Information 3 mm Bio-Compression Screw Instrumentation Set (AR-5025S) includes: Bio-Compression Screw Driver, noncannulated, 2.7 mm AR-5025DB Small Handle
Bio-Compression Arthrex Screw System Ordering Information 3 mm Bio-Compression Screw Instrumentation Set (AR-5025S) includes: Bio-Compression Screw Driver, noncannulated, 2.7 mm AR-5025DB Small Handle
SMart wearable Robotic Teleoperated surgery
 SMart wearable Robotic Teleoperated surgery This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 732515 Context Minimally
SMart wearable Robotic Teleoperated surgery This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 732515 Context Minimally
WHITE PAPER 3D PRINTED SURGICAL INSTRUMENTS
 WHITE PAPER ON 3D PRINTED SURGICAL INSTRUMENTS BRIEF INTRODUCTION Surgical instruments are the essential tools that are designed for enabling access, viewing the internal organs and to perform surgical
WHITE PAPER ON 3D PRINTED SURGICAL INSTRUMENTS BRIEF INTRODUCTION Surgical instruments are the essential tools that are designed for enabling access, viewing the internal organs and to perform surgical
Haptic Technology- Comprehensive Review Study with its Applications
 Haptic Technology- Comprehensive Review Study with its Applications Tanya Jaiswal 1, Rambha Yadav 2, Pooja Kedia 3 1,2 Student, Department of Computer Science and Engineering, Buddha Institute of Technology,
Haptic Technology- Comprehensive Review Study with its Applications Tanya Jaiswal 1, Rambha Yadav 2, Pooja Kedia 3 1,2 Student, Department of Computer Science and Engineering, Buddha Institute of Technology,
Tactile Interactions During Robot Assisted Surgical Interventions. Lakmal Seneviratne
 Tactile Interactions During Robot Assisted Surgical Interventions Lakmal Seneviratne Professor of Mechatronics Kings College London Professor of Mechanical Eng. Khalifa Univeristy, Abu Dhabi. 1 Overview
Tactile Interactions During Robot Assisted Surgical Interventions Lakmal Seneviratne Professor of Mechatronics Kings College London Professor of Mechanical Eng. Khalifa Univeristy, Abu Dhabi. 1 Overview
Medical Robotics. Part II: SURGICAL ROBOTICS
 5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
An Augmented Reality Application for the Enhancement of Surgical Decisions
 An Augmented Reality Application for the Enhancement of Surgical Decisions Lucio T. De Paolis, Giovanni Aloisio Department of Innovation Engineering Salento University Lecce, Italy lucio.depaolis@unisalento.it
An Augmented Reality Application for the Enhancement of Surgical Decisions Lucio T. De Paolis, Giovanni Aloisio Department of Innovation Engineering Salento University Lecce, Italy lucio.depaolis@unisalento.it
Virage OCT Spinal Fixation System
 Virage OCT Spinal Fixation System Virage OCT Spinal Fixation System Change Your Perspective Become a Part of the Posterior Fixation Revolution The Virage System is an Occipital-Cervico-Thoracic (OCT) spinal
Virage OCT Spinal Fixation System Virage OCT Spinal Fixation System Change Your Perspective Become a Part of the Posterior Fixation Revolution The Virage System is an Occipital-Cervico-Thoracic (OCT) spinal
da Vinci Skills Simulator
 da Vinci Skills Simulator Introducing Simulation for the da Vinci Surgical System Skills Practice in an Immersive Virtual Environment Portable. Practical. Powerful. The da Vinci Skills Simulator contains
da Vinci Skills Simulator Introducing Simulation for the da Vinci Surgical System Skills Practice in an Immersive Virtual Environment Portable. Practical. Powerful. The da Vinci Skills Simulator contains
Introducing the LumiCoil Platinum Fiducial Marker. Features of LumiCoil Platinum Fiducial Markers. Expanding Innovation in EUS
 LumiCoil Platinum Introducing the LumiCoil Platinum Features of LumiCoil Platinum s Expanding Innovation in EUS Ordering Information and Additional Resources LumiCoil Platinum Introducing the LumiCoil
LumiCoil Platinum Introducing the LumiCoil Platinum Features of LumiCoil Platinum s Expanding Innovation in EUS Ordering Information and Additional Resources LumiCoil Platinum Introducing the LumiCoil
Implants for surgery Orthopaedic joint prosthesis. Part 1: Procedure for producing parametric 3D bone models from CT data of the knee
 Provläsningsexemplar / Preview INTERNATIONAL STANDARD ISO 19233-1 First edition 2017-05 Implants for surgery Orthopaedic joint prosthesis Part 1: Procedure for producing parametric 3D bone models from
Provläsningsexemplar / Preview INTERNATIONAL STANDARD ISO 19233-1 First edition 2017-05 Implants for surgery Orthopaedic joint prosthesis Part 1: Procedure for producing parametric 3D bone models from
Haptic and Visual Simulation of a Material Cutting Process A Study Focused on Bone Surgery and the Use of Simulators for Education and Training
 Haptic and Visual Simulation of a Material Cutting Process A Study Focused on Bone Surgery and the Use of Simulators for Education and Training MAGNUS G. ERIKSSON Licentiate thesis Department of Neuronic
Haptic and Visual Simulation of a Material Cutting Process A Study Focused on Bone Surgery and the Use of Simulators for Education and Training MAGNUS G. ERIKSSON Licentiate thesis Department of Neuronic
MED-LIFE: A DIAGNOSTIC AID FOR MEDICAL IMAGERY
 MED-LIFE: A DIAGNOSTIC AID FOR MEDICAL IMAGERY Joshua R New, Erion Hasanbelliu and Mario Aguilar Knowledge Systems Laboratory, MCIS Department Jacksonville State University, Jacksonville, AL ABSTRACT We
MED-LIFE: A DIAGNOSTIC AID FOR MEDICAL IMAGERY Joshua R New, Erion Hasanbelliu and Mario Aguilar Knowledge Systems Laboratory, MCIS Department Jacksonville State University, Jacksonville, AL ABSTRACT We
A haptic enabled multimodal interface for the planning of hip arthroplasty
 A haptic enabled multimodal interface for the planning of hip arthroplasty Tsagarakis, NG, Gray, JO, Caldwell, DG, Zannoni, C, Petrone, M, Testi, D and Viceconti, M http://dx.doi.org/10.1109/mmul.2006.55
A haptic enabled multimodal interface for the planning of hip arthroplasty Tsagarakis, NG, Gray, JO, Caldwell, DG, Zannoni, C, Petrone, M, Testi, D and Viceconti, M http://dx.doi.org/10.1109/mmul.2006.55
Shared Investment. Shared Success. ReMAP Call for Proposals by Expression of Interest
 Shared Investment. Shared Success. ReMAP 2.0 2018 Call for Proposals by Expression of Interest What s a BL-NCE? Refined Manufacturing Acceleration Process (ReMAP) is an innovation accelerator focused on
Shared Investment. Shared Success. ReMAP 2.0 2018 Call for Proposals by Expression of Interest What s a BL-NCE? Refined Manufacturing Acceleration Process (ReMAP) is an innovation accelerator focused on
Medical Images Analysis and Processing
 Medical Images Analysis and Processing - 25642 Emad Course Introduction Course Information: Type: Graduated Credits: 3 Prerequisites: Digital Image Processing Course Introduction Reference(s): Insight
Medical Images Analysis and Processing - 25642 Emad Course Introduction Course Information: Type: Graduated Credits: 3 Prerequisites: Digital Image Processing Course Introduction Reference(s): Insight
The Reality in Virtual Reality: A Conversation with Practitioners at MIT Enterprise Forum of NYC
 The Reality in Virtual Reality: A Conversation with Practitioners at MIT Enterprise Forum of NYC On December 1, Fung Global Retail & Technology attended an event called The Reality in Virtual Reality:
The Reality in Virtual Reality: A Conversation with Practitioners at MIT Enterprise Forum of NYC On December 1, Fung Global Retail & Technology attended an event called The Reality in Virtual Reality:
RASim Prototype User Manual
 7 th Framework Programme This project has received funding from the European Union s Seventh Framework Programme for research, technological development and demonstration under grant agreement no 610425
7 th Framework Programme This project has received funding from the European Union s Seventh Framework Programme for research, technological development and demonstration under grant agreement no 610425
Scottish Health and Life Sciences Innovation Workshop. The Industrial Strategy Challenge Fund
 Scottish Health and Life Sciences Innovation Workshop The Industrial Strategy Challenge Fund Ian Campbell Innovate UK, Director of Health &Life Sciences Email:Ian.Campbell@innovateuk.gov.uk Twitter: @IanWCampbell
Scottish Health and Life Sciences Innovation Workshop The Industrial Strategy Challenge Fund Ian Campbell Innovate UK, Director of Health &Life Sciences Email:Ian.Campbell@innovateuk.gov.uk Twitter: @IanWCampbell
The Use of Localizers, Robots and Synergistic Devices in CAS. Jocelyne Troccaz* Michael Peshkin** Brian Davies***
 The Use of Localizers, Robots and Synergistic Devices in CAS Jocelyne Troccaz* Michael Peshkin** Brian Davies*** Abstract There are many roles for electromechanical devices in image guided surgery. One
The Use of Localizers, Robots and Synergistic Devices in CAS Jocelyne Troccaz* Michael Peshkin** Brian Davies*** Abstract There are many roles for electromechanical devices in image guided surgery. One
MIVS Tel:
 www.medical-imaging.org.uk medvis-info@bangor.ac.uk Tel: 01248 388244 MIVS 2014 Medical Imaging and Visualization Solutions Drop in centre from 10.00am-4.00pm Friday 17th Jan 2014 - Bangor, Gwynedd Post
www.medical-imaging.org.uk medvis-info@bangor.ac.uk Tel: 01248 388244 MIVS 2014 Medical Imaging and Visualization Solutions Drop in centre from 10.00am-4.00pm Friday 17th Jan 2014 - Bangor, Gwynedd Post
ECSEL Smart Health Project Portfolio and Strategic Agenda. Patrick Vandenberghe Programme Officer
 ECSEL Smart Health Project Portfolio and Strategic Agenda Patrick Vandenberghe Programme Officer ECSEL-IMI Joint Workshop July 5th 2017 1 Multi-Annual Strategic Plan MASP 2017 Strategic Thrusts Instruments
ECSEL Smart Health Project Portfolio and Strategic Agenda Patrick Vandenberghe Programme Officer ECSEL-IMI Joint Workshop July 5th 2017 1 Multi-Annual Strategic Plan MASP 2017 Strategic Thrusts Instruments