Swarm Robotics. Communication and Cooperation over the Internet. Will Ferenc, Hannah Kastein, Lauren Lieu, Ryan Wilson Mentor: Jérôme Gilles
|
|
|
- Abner West
- 5 years ago
- Views:
Transcription
1 and Cooperation over the Internet Will Ferenc, Hannah Kastein, Lauren Lieu, Ryan Wilson Mentor: Jérôme Gilles UCLA Applied Mathematics REU 2011

2 Credit: c 2010 Bruce Avera Hunter, Courtesy of life.nbii.gov Definition: Collective behavior of decentralized, self organized systems
 Two radios for communication Program in C using Xilinx Studio between upper and lower boards I No shared memory and limited streaming")
3 Third Generation Micro-Cars I I I I I I Short or long range IR sensor to detect barriers 350 MHz FPGA for on-board processing (Upper Board) 50 MHz ARM microcontroller for velocity and steering control (Lower Board) Two radios for communication Program in C using Xilinx Studio between upper and lower boards I No shared memory and limited streaming variables

")

4 Third Generation Micro-Cars Lower Board: Transmit position (GPS) Steering control Upper Board: Intervehicle communication GUI Processing

5 Setup Lower board radio: Tracking computer sends locations to individual cars Upper board radio: Intervehicle communication and GUI interface
 Binary tags")

6 Tracking System (GPS) Binary tags identify cars Thresholding Contour mapping
7 Finite state machine with token based broadcasting Daisy Chain algorithm and coupling
8 Problems: Encountered lossy transmission problems Enters infinite receiving loop if header byte is lost Internal clocks not synchronized Resulted in interference between transmitted messages Used overhead camera tracking broadcasts to locate peers Limited streaming between lower and upper boards
9 Objective: Set up a peer to peer network protocol for sharing information Enable swarming algorithms to share data about the environment and cooperatively execute tasks Rapidly updated information will compensate for lost messages

10 Plan Implement interrupt handlers for sending and receiving messages via upper board radio Time-scheduled broadcasting for individual cars Requires clock synchronization
11 Message: Number of Bytes Header 1 Car ID 1 X Coordinate 2 Y Coordinate 2 Heading 2 IR Sensor Distance 2 Terminator 1 Total 11 Broadcast: bps 1.2 ms per broadcast 10.8 ms for 9 cars GPS and Lower Board Streaming: 30 Hz takes 33.4 ms to update

12 Processing: Leave 1 ms after each send to parse and store the message Calculation: Remaining time reserved for onboard calculations and commands to the lower board
13
14 Objectives Tasks Follow a prescribed path Dynamically avoid obstacles Target search /Multi-robot Algorithm Robots have no apriori knowledge of map Know the position of other robots updated through peer to peer communications
15 Algorithm Potential Field Target emits attractive force. Boundary and peers emit a repulsive force. Car moves in the direction of the sum of all forces. F = Q r ( r t C r t 2 + Q r K 1 i=1 r i L r i 2 + i=1 B i ) Q r : car potential (< 0) C: target potential (> 0) r i : vector from i-th car to current car r t : vector from target to current car K : number of cars L: number of boundary points B i : i-th boundary term
 is arbitrarily chosen. Avoid scenario of all cars passing a boundary on the same side and creating a traffic jam.")
16 The Boundary Term, B i : No boundary i sensed within semicircle means B i = 0 Otherwise, ( ) r B i = B B r r B 2 where B r < 0 is the barrier potential. Perpendicular vector direction (r B ) is arbitrarily chosen. Avoid scenario of all cars passing a boundary on the same side and creating a traffic jam.

17 To go right or left... that is the question A line drawn between the target and the car separates the testbed into two regions. is chosen to be a vector in the region that contains less cars. r B Does it actually work? In simulations - Yes In practice - Fit a curve to IR sensor data to estimate distance from the boundary. If the distance is below a threshold, the car will go perpendicular to its current heading.
18 Algorithm One car leads - the rest follow Stay in formation without running into peers Also uses the concept of a potential field
19 Morse Potential Equations dx i dt m i dv i dt = v i = ( α β v i 2) v i U (x i ) + U (x i ) = 1 2 C l (x i y) 2 + N C 0 (v j v i ) j=1 N C r e x i x j /l r C a e x i x j /l a j=1 x i : i-th car s position C 0 : velocity alignment coefficient V i : i-th car s velocity C l : leader following coefficient y : position of leader car C r : car repulsion coefficient N : number of cars C a : car attraction coefficient α : self-propulsion l r : repulsion length β : drag l a : attraction length U : potential function

20 Networking testbeds collaboration Serial communication with cars Terminal Client C++ Terminal Synchronous Client Matlab Cars communicate wirelessly, so intercepting communication with the computer does not interfere over internet Requires Instrumentation Control Toolbox Can send strings, integers, floating point numbers, even matrices of a known dimension
21 Network Problems Firewall Latency to Cincinnati Port overuse TCP/IP Sucessful collaboration with UC
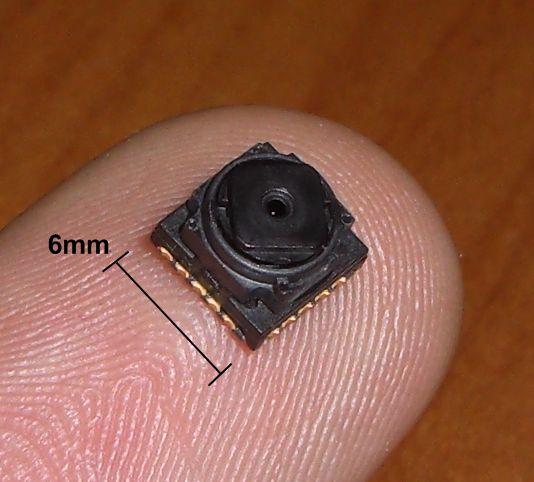
22 Camera
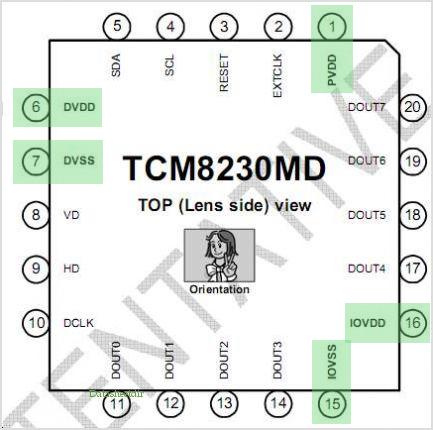
23 Hardware
24 Camera Configuration Use the built in IP to configure the 94 registers on the camera Registers to configure: FPS Resolution ACF (Flicker protection)...
25 Summary Created a peer to peer network that can be combined with swarm algorithms Implemented both a path planning and swarming algorithm Collaboratively swarmed in simulation with University of Cincinnati
26 Future Work Test more algorithms Test with more vehicles Collaborate with another testbed using vehicles Optimize interrupts so the onboard camera can function without conflicting with peer to peer
27 Acknowledgements Rick Huang Jérôme Gilles Andrea Bertozzi Yasser Taima UCLA Mathematics Computer Consulting Office (Bugs) University of Cincinnati Cooperative Distributed Systems Lab: Manish Kumar, Balaji Sharma Tim Arnett, Kevin McClellan, and Kaitlyn Fleming
28 References Y.R. Huang. Anteros Labs Micro-Car User Manual, Private Distribution, M. Gonzalez, X. Huang, D.S. Martinez, C.H. Hsieh, Y.R. Huang. A Third Generation Micro-Vehicle for Cooperative Control and Sensing Strategies, International Conference on Informatics in Control, Automation and Robotics (ICINCO), A. Turan, S. Bogosyan, M. Gokasan. Development of a Client-Server Method for Matlab/ Simulink Based Remote Robotics Experiments, 2006 IEEE International Symposium on Industrial Electronics. W. Liu, Y.E. Taima, M.B. Short and A.L. Bertozzi, Multi-scale Collaborative Searching and, in the Proceedings of the 7th International Conference on Informatics in Control, Automation, and Robotics (ICINCO), Madeira, Portugal, June B.Q. Nguyen, Y.L. Chuang, D. Tung, C. Hsieh, Z. Jin, L. Shi, D. Marthaler, A. Bertozzi, and R.M. Murray. Virtual Attractive-Repulsive Potentials for Cooperative Control of Second Order Dynamic Vehicles on the Caltech MVWT. American Control Conference, 2005, pp
29 Questions?
Robotic Swarming. Will Ferenc, Hannah Kastein, Lauren Lieu, Ryan Wilson. August 5, 2011
 Robotic Swarming Will Ferenc, Hannah Kastein, Lauren Lieu, Ryan Wilson August 5, 2011 Abstract This paper describes the research conducted during the Summer 2011 Research Experience for Undergraduates
Robotic Swarming Will Ferenc, Hannah Kastein, Lauren Lieu, Ryan Wilson August 5, 2011 Abstract This paper describes the research conducted during the Summer 2011 Research Experience for Undergraduates
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts
 Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
An Economical Framework for Verification of Swarm- Based Algorithms Using Small, Autonomous Robots
 An Economical Framework for Verification of Swarm- Based Algorithms Using Small, Autonomous Robots by James Bobinchak, Eric Ford, Rodney Heil, and Duane Schwartzwald Weapons and Energetics Department SEPTEMBER
An Economical Framework for Verification of Swarm- Based Algorithms Using Small, Autonomous Robots by James Bobinchak, Eric Ford, Rodney Heil, and Duane Schwartzwald Weapons and Energetics Department SEPTEMBER
Preliminary Design Report. Project Title: Search and Destroy
 EEL 494 Electrical Engineering Design (Senior Design) Preliminary Design Report 9 April 0 Project Title: Search and Destroy Team Member: Name: Robert Bethea Email: bbethea88@ufl.edu Project Abstract Name:
EEL 494 Electrical Engineering Design (Senior Design) Preliminary Design Report 9 April 0 Project Title: Search and Destroy Team Member: Name: Robert Bethea Email: bbethea88@ufl.edu Project Abstract Name:
Qosmotec. Software Solutions GmbH. Technical Overview. QPER C2X - Car-to-X Signal Strength Emulator and HiL Test Bench. Page 1
 Qosmotec Software Solutions GmbH Technical Overview QPER C2X - Page 1 TABLE OF CONTENTS 0 DOCUMENT CONTROL...3 0.1 Imprint...3 0.2 Document Description...3 1 SYSTEM DESCRIPTION...4 1.1 General Concept...4
Qosmotec Software Solutions GmbH Technical Overview QPER C2X - Page 1 TABLE OF CONTENTS 0 DOCUMENT CONTROL...3 0.1 Imprint...3 0.2 Document Description...3 1 SYSTEM DESCRIPTION...4 1.1 General Concept...4
The Caltech Multi-Vehicle Wireless Testbed: Initial Implementation
 The Caltech Multi-Vehicle Wireless Testbed: Initial Implementation Lars Cremean, Jason Meltzer, Ben Lee, Richard Murray (In collaboration with Steven Low, Jason Hickey, Eric Klavins, Reza Olfati, Bill
The Caltech Multi-Vehicle Wireless Testbed: Initial Implementation Lars Cremean, Jason Meltzer, Ben Lee, Richard Murray (In collaboration with Steven Low, Jason Hickey, Eric Klavins, Reza Olfati, Bill
Luca Schenato joint work with: A. Basso, G. Gamba
 Distributed consensus protocols for clock synchronization in sensor networks Luca Schenato joint work with: A. Basso, G. Gamba Networked Control Systems Drive-by-wire systems Swarm robotics Smart structures:
Distributed consensus protocols for clock synchronization in sensor networks Luca Schenato joint work with: A. Basso, G. Gamba Networked Control Systems Drive-by-wire systems Swarm robotics Smart structures:
Image Processing Based Autonomous Bradley Rover
 Image Processing Based Autonomous Bradley Rover Bradley University ECE Department December 7 th, 2004 Team Members: Steve Goggins Pete Lange Rob Scherbinske Advisors: Dr. Huggins Dr. Malinowski Dr. Schertz
Image Processing Based Autonomous Bradley Rover Bradley University ECE Department December 7 th, 2004 Team Members: Steve Goggins Pete Lange Rob Scherbinske Advisors: Dr. Huggins Dr. Malinowski Dr. Schertz
Gregory Bock, Brittany Dhall, Ryan Hendrickson, & Jared Lamkin Project Advisors: Dr. Jing Wang & Dr. In Soo Ahn Department of Electrical and Computer
 Gregory Bock, Brittany Dhall, Ryan Hendrickson, & Jared Lamkin Project Advisors: Dr. Jing Wang & Dr. In Soo Ahn Department of Electrical and Computer Engineering March 1 st, 2016 Outline 2 I. Introduction
Gregory Bock, Brittany Dhall, Ryan Hendrickson, & Jared Lamkin Project Advisors: Dr. Jing Wang & Dr. In Soo Ahn Department of Electrical and Computer Engineering March 1 st, 2016 Outline 2 I. Introduction
CANopen Programmer s Manual Part Number Version 1.0 October All rights reserved
 Part Number 95-00271-000 Version 1.0 October 2002 2002 All rights reserved Table Of Contents TABLE OF CONTENTS About This Manual... iii Overview and Scope... iii Related Documentation... iii Document Validity
Part Number 95-00271-000 Version 1.0 October 2002 2002 All rights reserved Table Of Contents TABLE OF CONTENTS About This Manual... iii Overview and Scope... iii Related Documentation... iii Document Validity
Formation and Cooperation for SWARMed Intelligent Robots
 Formation and Cooperation for SWARMed Intelligent Robots Wei Cao 1 Yanqing Gao 2 Jason Robert Mace 3 (West Virginia University 1 University of Arizona 2 Energy Corp. of America 3 ) Abstract This article
Formation and Cooperation for SWARMed Intelligent Robots Wei Cao 1 Yanqing Gao 2 Jason Robert Mace 3 (West Virginia University 1 University of Arizona 2 Energy Corp. of America 3 ) Abstract This article
CDS 110 L10.2: Motion Control Systems. Motion Control Systems
 CDS, Lecture.2 4 Dec 2 R. M. Murray, Caltech CDS CDS L.2: Motion Control Systems Richard M. Murray 4 December 22 Announcements Final exam available at 3 pm (during break); due 5 pm, Friday, 3 Dec 2 Outline:
CDS, Lecture.2 4 Dec 2 R. M. Murray, Caltech CDS CDS L.2: Motion Control Systems Richard M. Murray 4 December 22 Announcements Final exam available at 3 pm (during break); due 5 pm, Friday, 3 Dec 2 Outline:
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Traffic Control for a Swarm of Robots: Avoiding Target Congestion
 Traffic Control for a Swarm of Robots: Avoiding Target Congestion Leandro Soriano Marcolino and Luiz Chaimowicz Abstract One of the main problems in the navigation of robotic swarms is when several robots
Traffic Control for a Swarm of Robots: Avoiding Target Congestion Leandro Soriano Marcolino and Luiz Chaimowicz Abstract One of the main problems in the navigation of robotic swarms is when several robots
OPEN CV BASED AUTONOMOUS RC-CAR
 OPEN CV BASED AUTONOMOUS RC-CAR B. Sabitha 1, K. Akila 2, S.Krishna Kumar 3, D.Mohan 4, P.Nisanth 5 1,2 Faculty, Department of Mechatronics Engineering, Kumaraguru College of Technology, Coimbatore, India
OPEN CV BASED AUTONOMOUS RC-CAR B. Sabitha 1, K. Akila 2, S.Krishna Kumar 3, D.Mohan 4, P.Nisanth 5 1,2 Faculty, Department of Mechatronics Engineering, Kumaraguru College of Technology, Coimbatore, India
Syed Obaid Amin. Date: February 11 th, Networking Lab Kyung Hee University
 Detecting Jamming Attacks in Ubiquitous Sensor Networks Networking Lab Kyung Hee University Date: February 11 th, 2008 Syed Obaid Amin obaid@networking.khu.ac.kr Contents Background Introduction USN (Ubiquitous
Detecting Jamming Attacks in Ubiquitous Sensor Networks Networking Lab Kyung Hee University Date: February 11 th, 2008 Syed Obaid Amin obaid@networking.khu.ac.kr Contents Background Introduction USN (Ubiquitous
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control. October 5, 2009 Dr. Harrison H. Chin
 2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
Separately Excited DC Motor for Electric Vehicle Controller Design Yulan Qi
 6th International Conference on Sensor etwork and Computer Engineering (ICSCE 2016) Separately Excited DC Motor for Electric Vehicle Controller Design ulan Qi Wuhan Textile University, Wuhan, China Keywords:
6th International Conference on Sensor etwork and Computer Engineering (ICSCE 2016) Separately Excited DC Motor for Electric Vehicle Controller Design ulan Qi Wuhan Textile University, Wuhan, China Keywords:
DEEJAM: Defeating Energy-Efficient Jamming in IEEE based Wireless Networks
 DEEJAM: Defeating Energy-Efficient Jamming in IEEE 802.15.4-based Wireless Networks Anthony D. Wood, John A. Stankovic, Gang Zhou Department of Computer Science University of Virginia Wireless Sensor Networks
DEEJAM: Defeating Energy-Efficient Jamming in IEEE 802.15.4-based Wireless Networks Anthony D. Wood, John A. Stankovic, Gang Zhou Department of Computer Science University of Virginia Wireless Sensor Networks
Wireless Sensor Networks
 DEEJAM: Defeating Energy-Efficient Jamming in IEEE 802.15.4-based Wireless Networks Anthony D. Wood, John A. Stankovic, Gang Zhou Department of Computer Science University of Virginia June 19, 2007 Wireless
DEEJAM: Defeating Energy-Efficient Jamming in IEEE 802.15.4-based Wireless Networks Anthony D. Wood, John A. Stankovic, Gang Zhou Department of Computer Science University of Virginia June 19, 2007 Wireless
Lab 7 Remotely Operated Vehicle v2.0
 Lab 7 Remotely Operated Vehicle v2.0 ECE 375 Oregon State University Page 51 Objectives Use your knowledge of computer architecture to create a real system as a proof of concept for a possible consumer
Lab 7 Remotely Operated Vehicle v2.0 ECE 375 Oregon State University Page 51 Objectives Use your knowledge of computer architecture to create a real system as a proof of concept for a possible consumer
Multi robot Team Formation for Distributed Area Coverage. Raj Dasgupta Computer Science Department University of Nebraska, Omaha
 Multi robot Team Formation for Distributed Area Coverage Raj Dasgupta Computer Science Department University of Nebraska, Omaha C MANTIC Lab Collaborative Multi AgeNt/Multi robot Technologies for Intelligent
Multi robot Team Formation for Distributed Area Coverage Raj Dasgupta Computer Science Department University of Nebraska, Omaha C MANTIC Lab Collaborative Multi AgeNt/Multi robot Technologies for Intelligent
802.16s SOFTWARE PLATFORM
 General Software s 802.16s SOFTWARE PLATFORM Architecture Operation system Embedded Linux 1. MAC layer application running on ARM processor 2. PHY layer application running on DSP Application software
General Software s 802.16s SOFTWARE PLATFORM Architecture Operation system Embedded Linux 1. MAC layer application running on ARM processor 2. PHY layer application running on DSP Application software
III. MATERIAL AND COMPONENTS USED
 Prototype Development of a Smartphone- Controlled Robotic Vehicle with Pick- Place Capability Dheeraj Sharma Electronics and communication department Gian Jyoti Institute Of Engineering And Technology,
Prototype Development of a Smartphone- Controlled Robotic Vehicle with Pick- Place Capability Dheeraj Sharma Electronics and communication department Gian Jyoti Institute Of Engineering And Technology,
FPGA Implementation of a PID Controller with DC Motor Application
 FPGA Implementation of a PID Controller with DC Motor Application Members Paul Leisher Christopher Meyers Advisors Dr. Stewart Dr. Dempsey This project aims to implement a digital PID controller by means
FPGA Implementation of a PID Controller with DC Motor Application Members Paul Leisher Christopher Meyers Advisors Dr. Stewart Dr. Dempsey This project aims to implement a digital PID controller by means
MATLAB is a high-level programming language, extensively
 1 KUKA Sunrise Toolbox: Interfacing Collaborative Robots with MATLAB Mohammad Safeea and Pedro Neto Abstract Collaborative robots are increasingly present in our lives. The KUKA LBR iiwa equipped with
1 KUKA Sunrise Toolbox: Interfacing Collaborative Robots with MATLAB Mohammad Safeea and Pedro Neto Abstract Collaborative robots are increasingly present in our lives. The KUKA LBR iiwa equipped with
Embedded Robotics. Software Development & Education Center
 Software Development & Education Center Embedded Robotics Robotics Development with ARM µp INTRODUCTION TO ROBOTICS Types of robots Legged robots Mobile robots Autonomous robots Manual robots Robotic arm
Software Development & Education Center Embedded Robotics Robotics Development with ARM µp INTRODUCTION TO ROBOTICS Types of robots Legged robots Mobile robots Autonomous robots Manual robots Robotic arm
CANopen Programmer s Manual
 CANopen Programmer s Manual Part Number 95-00271-000 Revision 7 November 2012 CANopen Programmer s Manual Table of Contents TABLE OF CONTENTS About This Manual... 6 1: Introduction... 11 1.1: CAN and
CANopen Programmer s Manual Part Number 95-00271-000 Revision 7 November 2012 CANopen Programmer s Manual Table of Contents TABLE OF CONTENTS About This Manual... 6 1: Introduction... 11 1.1: CAN and
CANopen Programmer s Manual
 CANopen Programmer s Manual Part Number 95-00271-000 Revision 5 October, 2008 CANopen Programmer s Manual Table of Contents TABLE OF CONTENTS About This Manual... 7 Overview and Scope... 7 Related Documentation...
CANopen Programmer s Manual Part Number 95-00271-000 Revision 5 October, 2008 CANopen Programmer s Manual Table of Contents TABLE OF CONTENTS About This Manual... 7 Overview and Scope... 7 Related Documentation...
Localization in Wireless Sensor Networks
 Localization in Wireless Sensor Networks Part 2: Localization techniques Department of Informatics University of Oslo Cyber Physical Systems, 11.10.2011 Localization problem in WSN In a localization problem
Localization in Wireless Sensor Networks Part 2: Localization techniques Department of Informatics University of Oslo Cyber Physical Systems, 11.10.2011 Localization problem in WSN In a localization problem
ReVRSR: Remote Virtual Reality for Service Robots
 ReVRSR: Remote Virtual Reality for Service Robots Amel Hassan, Ahmed Ehab Gado, Faizan Muhammad March 17, 2018 Abstract This project aims to bring a service robot s perspective to a human user. We believe
ReVRSR: Remote Virtual Reality for Service Robots Amel Hassan, Ahmed Ehab Gado, Faizan Muhammad March 17, 2018 Abstract This project aims to bring a service robot s perspective to a human user. We believe
Mechatronics Project Presentation
 Mechatronics Project Presentation An Inexpensive Electronic Method for Measuring Takeoff Distances BY: KARL ABDELNOUR ROBERT ECKHARDT SAUMIL PARIKH 1 OUTLINE OF PRESENTATION INTRODUCTION HARDWARE EXPERIMENTAL
Mechatronics Project Presentation An Inexpensive Electronic Method for Measuring Takeoff Distances BY: KARL ABDELNOUR ROBERT ECKHARDT SAUMIL PARIKH 1 OUTLINE OF PRESENTATION INTRODUCTION HARDWARE EXPERIMENTAL
Timothy H. Chung EDUCATION RESEARCH
 Timothy H. Chung MC 104-44, Pasadena, CA 91125, USA Email: timothyc@caltech.edu Phone: 626-221-0251 (cell) Web: http://robotics.caltech.edu/ timothyc EDUCATION Ph.D., Mechanical Engineering May 2007 Thesis:
Timothy H. Chung MC 104-44, Pasadena, CA 91125, USA Email: timothyc@caltech.edu Phone: 626-221-0251 (cell) Web: http://robotics.caltech.edu/ timothyc EDUCATION Ph.D., Mechanical Engineering May 2007 Thesis:
Team Project: A Surveillant Robot System
 Team Project: A Surveillant Robot System Functional Analysis Little Red Team Chankyu Park (Michael) Seonah Lee (Sarah) Qingyuan Shi (Lisa) Chengzhou Li JunMei Li Kai Lin System Overview robots, Play a
Team Project: A Surveillant Robot System Functional Analysis Little Red Team Chankyu Park (Michael) Seonah Lee (Sarah) Qingyuan Shi (Lisa) Chengzhou Li JunMei Li Kai Lin System Overview robots, Play a
Using Vision-Based Driver Assistance to Augment Vehicular Ad-Hoc Network Communication
 Using Vision-Based Driver Assistance to Augment Vehicular Ad-Hoc Network Communication Kyle Charbonneau, Michael Bauer and Steven Beauchemin Department of Computer Science University of Western Ontario
Using Vision-Based Driver Assistance to Augment Vehicular Ad-Hoc Network Communication Kyle Charbonneau, Michael Bauer and Steven Beauchemin Department of Computer Science University of Western Ontario
Design and Test of FPGA-based Direction-of-Arrival Algorithms for Adaptive Array Antennas
 2011 IEEE Aerospace Conference Big Sky, MT, March 7, 2011 Session# 3.01 Phased Array Antennas Systems and Beam Forming Technologies Pres #: 3.0102, Paper ID: 1198 Rm: Elbow 3, Time: 8:55am Design and Test
2011 IEEE Aerospace Conference Big Sky, MT, March 7, 2011 Session# 3.01 Phased Array Antennas Systems and Beam Forming Technologies Pres #: 3.0102, Paper ID: 1198 Rm: Elbow 3, Time: 8:55am Design and Test
Automated Driving Car Using Image Processing
 Automated Driving Car Using Image Processing Shrey Shah 1, Debjyoti Das Adhikary 2, Ashish Maheta 3 Abstract: In day to day life many car accidents occur due to lack of concentration as well as lack of
Automated Driving Car Using Image Processing Shrey Shah 1, Debjyoti Das Adhikary 2, Ashish Maheta 3 Abstract: In day to day life many car accidents occur due to lack of concentration as well as lack of
Weak-Signal Radio Communications for Bitcoin Network Resilience. Nick Szabo, Elaine Ou globalfinancialaccess.com Scaling Bitcoin 2017
 Weak-Signal Radio Communications for Bitcoin Network Resilience Nick Szabo, Elaine Ou globalfinancialaccess.com Scaling Bitcoin 2017 What is Weak-Signal HF Radio? Radio transmission using shortwave frequencies
Weak-Signal Radio Communications for Bitcoin Network Resilience Nick Szabo, Elaine Ou globalfinancialaccess.com Scaling Bitcoin 2017 What is Weak-Signal HF Radio? Radio transmission using shortwave frequencies
Agriculture Automation & Monitoring using NI my RIO & Image Processing to Estimate Physical Parameters of Soil
 IJSRD - International Journal for Scientific Research & Development Vol. 6, Issue 07, 2018 ISSN (online): 2321-0613 Agriculture Automation & Monitoring using NI my RIO & Image Processing to Estimate Physical
IJSRD - International Journal for Scientific Research & Development Vol. 6, Issue 07, 2018 ISSN (online): 2321-0613 Agriculture Automation & Monitoring using NI my RIO & Image Processing to Estimate Physical
Pedestrian Protection Using the Integration of V2V and the Pedestrian Automatic Emergency Braking System
 This is the author's manuscript of the article published in final edited form as: Tang, B., Chien, S., Huang, Z., & Chen, Y. (2016). Pedestrian protection using the integration of V2V and the Pedestrian
This is the author's manuscript of the article published in final edited form as: Tang, B., Chien, S., Huang, Z., & Chen, Y. (2016). Pedestrian protection using the integration of V2V and the Pedestrian
A PID Controller for Real-Time DC Motor Speed Control using the C505C Microcontroller
 A PID Controller for Real-Time DC Motor Speed Control using the C505C Microcontroller Sukumar Kamalasadan Division of Engineering and Computer Technology University of West Florida, Pensacola, FL, 32513
A PID Controller for Real-Time DC Motor Speed Control using the C505C Microcontroller Sukumar Kamalasadan Division of Engineering and Computer Technology University of West Florida, Pensacola, FL, 32513
Volume 2, Issue 9, September 2014 International Journal of Advance Research in Computer Science and Management Studies
 Volume 2, Issue 9, September 2014 International Journal of Advance Research in Computer Science and Management Studies Research Article / Survey Paper / Case Study Available online at: www.ijarcsms.com
Volume 2, Issue 9, September 2014 International Journal of Advance Research in Computer Science and Management Studies Research Article / Survey Paper / Case Study Available online at: www.ijarcsms.com
Proposal for a Rapid Prototyping Environment for Algorithms Intended for Autonoumus Mobile Robot Control
 Mechanics and Mechanical Engineering Vol. 12, No. 1 (2008) 5 16 c Technical University of Lodz Proposal for a Rapid Prototyping Environment for Algorithms Intended for Autonoumus Mobile Robot Control Andrzej
Mechanics and Mechanical Engineering Vol. 12, No. 1 (2008) 5 16 c Technical University of Lodz Proposal for a Rapid Prototyping Environment for Algorithms Intended for Autonoumus Mobile Robot Control Andrzej
A Decentralized Network in Vehicle Platoons for Collision Avoidance
 A Decentralized Network in Vehicle Platoons for Collision Avoidance Ankur Sarker*, Chenxi Qiu, and Haiying Shen* *Dept. of Computer Science, University of Virginia, USA College of Information Science and
A Decentralized Network in Vehicle Platoons for Collision Avoidance Ankur Sarker*, Chenxi Qiu, and Haiying Shen* *Dept. of Computer Science, University of Virginia, USA College of Information Science and
Appendix C T1 Overview
 Appendix C T Overview GENERAL T refers to the primary digital telephone carrier system used in North America. T is one line type of the PCM T-carrier hierarchy listed in Table C-. T describes the cabling,
Appendix C T Overview GENERAL T refers to the primary digital telephone carrier system used in North America. T is one line type of the PCM T-carrier hierarchy listed in Table C-. T describes the cabling,
High-level model of an acceleration sensor with feedback as part of an inertial navigation system
 High-level model of an sensor with feedback as part of an inertial navigation system Erik Markert, Göran Herrmann, Dietmar Müller and Ulrich Heinkel Department of Electrical Engineering and Information
High-level model of an sensor with feedback as part of an inertial navigation system Erik Markert, Göran Herrmann, Dietmar Müller and Ulrich Heinkel Department of Electrical Engineering and Information
Experiments in the Coordination of Large Groups of Robots
 Experiments in the Coordination of Large Groups of Robots Leandro Soriano Marcolino and Luiz Chaimowicz VeRLab - Vision and Robotics Laboratory Computer Science Department - UFMG - Brazil {soriano, chaimo}@dcc.ufmg.br
Experiments in the Coordination of Large Groups of Robots Leandro Soriano Marcolino and Luiz Chaimowicz VeRLab - Vision and Robotics Laboratory Computer Science Department - UFMG - Brazil {soriano, chaimo}@dcc.ufmg.br
Wireless Sensor Network based Shooter Localization
 Wireless Sensor Network based Shooter Localization Miklos Maroti, Akos Ledeczi, Gyula Simon, Gyorgy Balogh, Branislav Kusy, Andras Nadas, Gabor Pap, Janos Sallai ISIS - Vanderbilt University Overview CONOPS
Wireless Sensor Network based Shooter Localization Miklos Maroti, Akos Ledeczi, Gyula Simon, Gyorgy Balogh, Branislav Kusy, Andras Nadas, Gabor Pap, Janos Sallai ISIS - Vanderbilt University Overview CONOPS
An Improved DV-Hop Localization Algorithm Based on Hop Distance and Hops Correction
 , pp.319-328 http://dx.doi.org/10.14257/ijmue.2016.11.6.28 An Improved DV-Hop Localization Algorithm Based on Hop Distance and Hops Correction Xiaoying Yang* and Wanli Zhang College of Information Engineering,
, pp.319-328 http://dx.doi.org/10.14257/ijmue.2016.11.6.28 An Improved DV-Hop Localization Algorithm Based on Hop Distance and Hops Correction Xiaoying Yang* and Wanli Zhang College of Information Engineering,
BlinkRC User Manual. 21 December Hardware Version 1.1. Manual Version 2.0. Copyright 2010, Blink Gear LLC. All rights reserved.
 BlinkRC 802.11b/g WiFi Servo Controller with Analog Feedback BlinkRC User Manual 21 December 2010 Hardware Version 1.1 Manual Version 2.0 Copyright 2010, Blink Gear LLC. All rights reserved. http://blinkgear.com
BlinkRC 802.11b/g WiFi Servo Controller with Analog Feedback BlinkRC User Manual 21 December 2010 Hardware Version 1.1 Manual Version 2.0 Copyright 2010, Blink Gear LLC. All rights reserved. http://blinkgear.com
ISSN No: International Journal & Magazine of Engineering, Technology, Management and Research
 Design of Automatic Number Plate Recognition System Using OCR for Vehicle Identification M.Kesab Chandrasen Abstract: Automatic Number Plate Recognition (ANPR) is an image processing technology which uses
Design of Automatic Number Plate Recognition System Using OCR for Vehicle Identification M.Kesab Chandrasen Abstract: Automatic Number Plate Recognition (ANPR) is an image processing technology which uses
Software Computer Vision - Driver Assistance
 Software Computer Vision - Driver Assistance Work @Bosch for developing desktop, web or embedded software and algorithms / computer vision / artificial intelligence for Driver Assistance Systems and Automated
Software Computer Vision - Driver Assistance Work @Bosch for developing desktop, web or embedded software and algorithms / computer vision / artificial intelligence for Driver Assistance Systems and Automated
Optimal Driving System for Two Wheelers
 Optimal Driving System for Two Wheelers Harshitha.L 1, Kiran.N.V 2, MadhanMohanReddy.T.R 3, DeepikaYadav.M.N 4, Babitha.K.M 5 Abstract: - In this paper, we implement interaction between the bike and various
Optimal Driving System for Two Wheelers Harshitha.L 1, Kiran.N.V 2, MadhanMohanReddy.T.R 3, DeepikaYadav.M.N 4, Babitha.K.M 5 Abstract: - In this paper, we implement interaction between the bike and various
Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model
 1 Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model {Final Version with
1 Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model {Final Version with
Influence of GPS Measurements Quality to NTP Time-Keeping
 Influence of GPS Measurements Quality to NTP Time-Keeping Vukan Ogrizović 1, Jelena Gučević 2, Siniša Delčev 3 1 +381 11 3218 582, fax: +381113370223, e-mail: vukan@grf.bg.ac.rs 2 +381 11 3218 538, fax:
Influence of GPS Measurements Quality to NTP Time-Keeping Vukan Ogrizović 1, Jelena Gučević 2, Siniša Delčev 3 1 +381 11 3218 582, fax: +381113370223, e-mail: vukan@grf.bg.ac.rs 2 +381 11 3218 538, fax:
Real-Time Testing Made Easy with Simulink Real-Time
 Real-Time Testing Made Easy with Simulink Real-Time Andreas Uschold Application Engineer MathWorks Martin Rosser Technical Sales Engineer Speedgoat 2015 The MathWorks, Inc. 1 Model-Based Design Continuous
Real-Time Testing Made Easy with Simulink Real-Time Andreas Uschold Application Engineer MathWorks Martin Rosser Technical Sales Engineer Speedgoat 2015 The MathWorks, Inc. 1 Model-Based Design Continuous
Battery Powered People Counter with Integral LCD Display & 418Mhz Data Transmitter
 Battery Powered People with Integral LCD Display & 418Mhz Data Transmitter The SenSource PCW-TB06 is a battery powered people counter with 418Mhz RF wireless data transmitter. Truly wireless installation
Battery Powered People with Integral LCD Display & 418Mhz Data Transmitter The SenSource PCW-TB06 is a battery powered people counter with 418Mhz RF wireless data transmitter. Truly wireless installation
Rapid Design of FIR Filters in the SDR- 500 Software Defined Radio Evaluation System using the ASN Filter Designer
 Rapid Design of FIR Filters in the SDR- 500 Software Defined Radio Evaluation System using the ASN Filter Designer Application note (ASN-AN026) October 2017 (Rev B) SYNOPSIS SDR (Software Defined Radio)
Rapid Design of FIR Filters in the SDR- 500 Software Defined Radio Evaluation System using the ASN Filter Designer Application note (ASN-AN026) October 2017 (Rev B) SYNOPSIS SDR (Software Defined Radio)
Lab 1: Analog Modulations
 Lab 1: Analog Modulations October 20, 2017 This lab contains two parts: for the first part you will perform simulation entirely in MATLAB, for the second part you will use a hardware device to interface
Lab 1: Analog Modulations October 20, 2017 This lab contains two parts: for the first part you will perform simulation entirely in MATLAB, for the second part you will use a hardware device to interface
Autonomous Control for Unmanned
 Autonomous Control for Unmanned Surface Vehicles December 8, 2016 Carl Conti, CAPT, USN (Ret) Spatial Integrated Systems, Inc. SIS Corporate Profile Small Business founded in 1997, focusing on Research,
Autonomous Control for Unmanned Surface Vehicles December 8, 2016 Carl Conti, CAPT, USN (Ret) Spatial Integrated Systems, Inc. SIS Corporate Profile Small Business founded in 1997, focusing on Research,
AUTOMATIC NUMBER PLATE DETECTION USING IMAGE PROCESSING AND PAYMENT AT TOLL PLAZA
 Reg. No.:20151213 DOI:V4I3P13 AUTOMATIC NUMBER PLATE DETECTION USING IMAGE PROCESSING AND PAYMENT AT TOLL PLAZA Meet Shah, meet.rs@somaiya.edu Information Technology, KJSCE Mumbai, India. Akshaykumar Timbadia,
Reg. No.:20151213 DOI:V4I3P13 AUTOMATIC NUMBER PLATE DETECTION USING IMAGE PROCESSING AND PAYMENT AT TOLL PLAZA Meet Shah, meet.rs@somaiya.edu Information Technology, KJSCE Mumbai, India. Akshaykumar Timbadia,
Distributed Intelligence in Autonomous Robotics. Assignment #1 Out: Thursday, January 16, 2003 Due: Tuesday, January 28, 2003
 Distributed Intelligence in Autonomous Robotics Assignment #1 Out: Thursday, January 16, 2003 Due: Tuesday, January 28, 2003 The purpose of this assignment is to build familiarity with the Nomad200 robotic
Distributed Intelligence in Autonomous Robotics Assignment #1 Out: Thursday, January 16, 2003 Due: Tuesday, January 28, 2003 The purpose of this assignment is to build familiarity with the Nomad200 robotic
Design of a High Speed FIR Filter on FPGA by Using DA-OBC Algorithm
 Design of a High Speed FIR Filter on FPGA by Using DA-OBC Algorithm Vijay Kumar Ch 1, Leelakrishna Muthyala 1, Chitra E 2 1 Research Scholar, VLSI, SRM University, Tamilnadu, India 2 Assistant Professor,
Design of a High Speed FIR Filter on FPGA by Using DA-OBC Algorithm Vijay Kumar Ch 1, Leelakrishna Muthyala 1, Chitra E 2 1 Research Scholar, VLSI, SRM University, Tamilnadu, India 2 Assistant Professor,
Requirements Specification Minesweeper
 Requirements Specification Minesweeper Version. Editor: Elin Näsholm Date: November 28, 207 Status Reviewed Elin Näsholm 2/9 207 Approved Martin Lindfors 2/9 207 Course name: Automatic Control - Project
Requirements Specification Minesweeper Version. Editor: Elin Näsholm Date: November 28, 207 Status Reviewed Elin Näsholm 2/9 207 Approved Martin Lindfors 2/9 207 Course name: Automatic Control - Project
A Lego-Based Soccer-Playing Robot Competition For Teaching Design
 Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
Wireless technologies Test systems
 Wireless technologies Test systems 8 Test systems for V2X communications Future automated vehicles will be wirelessly networked with their environment and will therefore be able to preventively respond
Wireless technologies Test systems 8 Test systems for V2X communications Future automated vehicles will be wirelessly networked with their environment and will therefore be able to preventively respond
Master Thesis Presentation Future Electric Vehicle on Lego By Karan Savant. Guide: Dr. Kai Huang
 Master Thesis Presentation Future Electric Vehicle on Lego By Karan Savant Guide: Dr. Kai Huang Overview Objective Lego Car Wifi Interface to Lego Car Lego Car FPGA System Android Application Conclusion
Master Thesis Presentation Future Electric Vehicle on Lego By Karan Savant Guide: Dr. Kai Huang Overview Objective Lego Car Wifi Interface to Lego Car Lego Car FPGA System Android Application Conclusion
Generation of Orthogonal Logistic Map Sequences for Application in Wireless Channel and Implementation using a Multiplierless Technique
 Generation of Orthogonal Logistic Map Sequences for Application in Wireless Channel and Implementation using a Multiplierless Technique KATYAYANI KASHYAP 1, MANASH PRATIM SARMA 1, KANDARPA KUMAR SARMA
Generation of Orthogonal Logistic Map Sequences for Application in Wireless Channel and Implementation using a Multiplierless Technique KATYAYANI KASHYAP 1, MANASH PRATIM SARMA 1, KANDARPA KUMAR SARMA
DEVELOPMENT OF A ROBOID COMPONENT FOR PLAYER/STAGE ROBOT SIMULATOR
 Proceedings of IC-NIDC2009 DEVELOPMENT OF A ROBOID COMPONENT FOR PLAYER/STAGE ROBOT SIMULATOR Jun Won Lim 1, Sanghoon Lee 2,Il Hong Suh 1, and Kyung Jin Kim 3 1 Dept. Of Electronics and Computer Engineering,
Proceedings of IC-NIDC2009 DEVELOPMENT OF A ROBOID COMPONENT FOR PLAYER/STAGE ROBOT SIMULATOR Jun Won Lim 1, Sanghoon Lee 2,Il Hong Suh 1, and Kyung Jin Kim 3 1 Dept. Of Electronics and Computer Engineering,
Intelligent Bus Tracking and Implementation in FPGA
 Intelligent Bus Tracking and Implementation in FPGA D.Gowtham 1,M.Deepan 1,N.Mohamad Arsathdeen 1,N.Mithun Mano Ranjith 1,Mrs.A.K.Kavitha 2 1.B.E(student) Final year, Electronics and Communication Engineering
Intelligent Bus Tracking and Implementation in FPGA D.Gowtham 1,M.Deepan 1,N.Mohamad Arsathdeen 1,N.Mithun Mano Ranjith 1,Mrs.A.K.Kavitha 2 1.B.E(student) Final year, Electronics and Communication Engineering
Estimation and Control of Lateral Displacement of Electric Vehicle Using WPT Information
 Estimation and Control of Lateral Displacement of Electric Vehicle Using WPT Information Pakorn Sukprasert Department of Electrical Engineering and Information Systems, The University of Tokyo Tokyo, Japan
Estimation and Control of Lateral Displacement of Electric Vehicle Using WPT Information Pakorn Sukprasert Department of Electrical Engineering and Information Systems, The University of Tokyo Tokyo, Japan
Using Infrared Array Devices in Smart Home Observation and Diagnostics
 Using Infrared Array Devices in Smart Home Observation and Diagnostics Galidiya Petrova 1, Grisha Spasov 2, Vasil Tsvetkov 3, 1 Department of Electronics at Technical University Sofia, Plovdiv branch,
Using Infrared Array Devices in Smart Home Observation and Diagnostics Galidiya Petrova 1, Grisha Spasov 2, Vasil Tsvetkov 3, 1 Department of Electronics at Technical University Sofia, Plovdiv branch,
RFID- GSM- GPS Imparted School Bus Transportation Management System
 International Journal of Research Studies in Science, Engineering and Technology Volume 3, Issue 8, August 2016, PP 12-16 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) RFID- GSM- GPS Imparted School
International Journal of Research Studies in Science, Engineering and Technology Volume 3, Issue 8, August 2016, PP 12-16 ISSN 2349-4751 (Print) & ISSN 2349-476X (Online) RFID- GSM- GPS Imparted School
CMDragons 2006 Team Description
 CMDragons 2006 Team Description James Bruce, Stefan Zickler, Mike Licitra, and Manuela Veloso Carnegie Mellon University Pittsburgh, Pennsylvania, USA {jbruce,szickler,mlicitra,mmv}@cs.cmu.edu Abstract.
CMDragons 2006 Team Description James Bruce, Stefan Zickler, Mike Licitra, and Manuela Veloso Carnegie Mellon University Pittsburgh, Pennsylvania, USA {jbruce,szickler,mlicitra,mmv}@cs.cmu.edu Abstract.
SonoLab Echo-I User Manual
 SonoLab Echo-I User Manual Overview: SonoLab Echo-I is a single board digital ultrasound pulse-echo solution. The system has a built in 50 volt high voltage generation circuit, a bipolar pulser, a transmit/receive
SonoLab Echo-I User Manual Overview: SonoLab Echo-I is a single board digital ultrasound pulse-echo solution. The system has a built in 50 volt high voltage generation circuit, a bipolar pulser, a transmit/receive
Progress Report. Mohammadtaghi G. Poshtmashhadi. Supervisor: Professor António M. Pascoal
 Progress Report Mohammadtaghi G. Poshtmashhadi Supervisor: Professor António M. Pascoal OceaNet meeting presentation April 2017 2 Work program Main Research Topic Autonomous Marine Vehicle Control and
Progress Report Mohammadtaghi G. Poshtmashhadi Supervisor: Professor António M. Pascoal OceaNet meeting presentation April 2017 2 Work program Main Research Topic Autonomous Marine Vehicle Control and
GE423 Laboratory Assignment 6 Robot Sensors and Wall-Following
 GE423 Laboratory Assignment 6 Robot Sensors and Wall-Following Goals for this Lab Assignment: 1. Learn about the sensors available on the robot for environment sensing. 2. Learn about classical wall-following
GE423 Laboratory Assignment 6 Robot Sensors and Wall-Following Goals for this Lab Assignment: 1. Learn about the sensors available on the robot for environment sensing. 2. Learn about classical wall-following
NCS Lecture 2 Case Study - Alice. Alice Overview
 NCS Lecture 2 Case Study - Alice Richard M. Murray 17 March 2008 Goals: Provide detailed overview of a a model networked control system Introduce NCS features to be addressed in upcoming lectures Reading:
NCS Lecture 2 Case Study - Alice Richard M. Murray 17 March 2008 Goals: Provide detailed overview of a a model networked control system Introduce NCS features to be addressed in upcoming lectures Reading:
Saphira Robot Control Architecture
 Saphira Robot Control Architecture Saphira Version 8.1.0 Kurt Konolige SRI International April, 2002 Copyright 2002 Kurt Konolige SRI International, Menlo Park, California 1 Saphira and Aria System Overview
Saphira Robot Control Architecture Saphira Version 8.1.0 Kurt Konolige SRI International April, 2002 Copyright 2002 Kurt Konolige SRI International, Menlo Park, California 1 Saphira and Aria System Overview
TIBCO FTL Part of the TIBCO Messaging Suite. Quick Start Guide
 TIBCO FTL 6.0.0 Part of the TIBCO Messaging Suite Quick Start Guide The TIBCO Messaging Suite TIBCO FTL is part of the TIBCO Messaging Suite. It includes not only TIBCO FTL, but also TIBCO eftl (providing
TIBCO FTL 6.0.0 Part of the TIBCO Messaging Suite Quick Start Guide The TIBCO Messaging Suite TIBCO FTL is part of the TIBCO Messaging Suite. It includes not only TIBCO FTL, but also TIBCO eftl (providing
Semi-Autonomous Parking for Enhanced Safety and Efficiency
 Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
NCR Channelizer Server
 NCR Channelizer Server Thousands of Signals One Receiver Novator Channelizer Receiver system lets you analyze thousands of signals with a single receiver. It streams channelized data to other systems where
NCR Channelizer Server Thousands of Signals One Receiver Novator Channelizer Receiver system lets you analyze thousands of signals with a single receiver. It streams channelized data to other systems where
Design and Implementation of Integrated Smart Township
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 11, Issue 2 Ver. I (Mar. Apr. 2016), PP 18-24 www.iosrjournals.org Design and Implementation
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 11, Issue 2 Ver. I (Mar. Apr. 2016), PP 18-24 www.iosrjournals.org Design and Implementation
Co-evolution for Communication: An EHW Approach
 Journal of Universal Computer Science, vol. 13, no. 9 (2007), 1300-1308 submitted: 12/6/06, accepted: 24/10/06, appeared: 28/9/07 J.UCS Co-evolution for Communication: An EHW Approach Yasser Baleghi Damavandi,
Journal of Universal Computer Science, vol. 13, no. 9 (2007), 1300-1308 submitted: 12/6/06, accepted: 24/10/06, appeared: 28/9/07 J.UCS Co-evolution for Communication: An EHW Approach Yasser Baleghi Damavandi,
Emergency Stop Final Project
 Emergency Stop Final Project Jeremy Cook and Jessie Chen May 2017 1 Abstract Autonomous robots are not fully autonomous yet, and it should be expected that they could fail at any moment. Given the validity
Emergency Stop Final Project Jeremy Cook and Jessie Chen May 2017 1 Abstract Autonomous robots are not fully autonomous yet, and it should be expected that they could fail at any moment. Given the validity
Department of Computer Science and Engineering The Chinese University of Hong Kong. Year Final Year Project
 Digital Interactive Game Interface Table Apps for ipad Supervised by: Professor Michael R. Lyu Student: Ng Ka Hung (1009615714) Chan Hing Faat (1009618344) Year 2011 2012 Final Year Project Department
Digital Interactive Game Interface Table Apps for ipad Supervised by: Professor Michael R. Lyu Student: Ng Ka Hung (1009615714) Chan Hing Faat (1009618344) Year 2011 2012 Final Year Project Department
Mobile Robots (Wheeled) (Take class notes)
 (Take class notes)") Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Configuring OSPF. Information About OSPF CHAPTER
 CHAPTER 22 This chapter describes how to configure the ASASM to route data, perform authentication, and redistribute routing information using the Open Shortest Path First (OSPF) routing protocol. The
CHAPTER 22 This chapter describes how to configure the ASASM to route data, perform authentication, and redistribute routing information using the Open Shortest Path First (OSPF) routing protocol. The
Lab S-3: Beamforming with Phasors. N r k. is the time shift applied to r k
 DSP First, 2e Signal Processing First Lab S-3: Beamforming with Phasors Pre-Lab: Read the Pre-Lab and do all the exercises in the Pre-Lab section prior to attending lab. Verification: The Exercise section
DSP First, 2e Signal Processing First Lab S-3: Beamforming with Phasors Pre-Lab: Read the Pre-Lab and do all the exercises in the Pre-Lab section prior to attending lab. Verification: The Exercise section
Design and Implementation of an Unmanned Ground Vehicle
 Design and Implementation of an Unmanned Ground Vehicle Abstract Shreyas H, Thirumalesh H S Department of Electrical and Electronics Engineering, SJCE, Mysore, India Email: shreyas9693@gmail.com, hsthirumalesh@gmail.com
Design and Implementation of an Unmanned Ground Vehicle Abstract Shreyas H, Thirumalesh H S Department of Electrical and Electronics Engineering, SJCE, Mysore, India Email: shreyas9693@gmail.com, hsthirumalesh@gmail.com
SM 4117 Virtual Reality Assignment 2 By Li Yiu Chong ( )
") SM 4117 Virtual Reality Assignment 2 By Li Yiu Chong (50262340) In this essay I would analyze the environment of driving game under a network. The analysis will be base on 3D driving game of decentralized
SM 4117 Virtual Reality Assignment 2 By Li Yiu Chong (50262340) In this essay I would analyze the environment of driving game under a network. The analysis will be base on 3D driving game of decentralized
Project Name Here CSEE 4840 Project Design Document. Thomas Chau Ben Sack Peter Tsonev
 Project Name Here CSEE 4840 Project Design Document Thomas Chau tc2165@columbia.edu Ben Sack bs2535@columbia.edu Peter Tsonev pvt2101@columbia.edu Table of contents: Introduction Page 3 Block Diagram Page
Project Name Here CSEE 4840 Project Design Document Thomas Chau tc2165@columbia.edu Ben Sack bs2535@columbia.edu Peter Tsonev pvt2101@columbia.edu Table of contents: Introduction Page 3 Block Diagram Page
Ultra-Low Duty Cycle MAC with Scheduled Channel Polling
 Ultra-Low Duty Cycle MAC with Scheduled Channel Polling Wei Ye and John Heidemann CS577 Brett Levasseur 12/3/2013 Outline Introduction Scheduled Channel Polling (SCP-MAC) Energy Performance Analysis Implementation
Ultra-Low Duty Cycle MAC with Scheduled Channel Polling Wei Ye and John Heidemann CS577 Brett Levasseur 12/3/2013 Outline Introduction Scheduled Channel Polling (SCP-MAC) Energy Performance Analysis Implementation
Installation procedure Ground loop reader: LBS type R12 / RS232 type 5C
 Ground loop reader: LBS type R2 / RS232 type 5C "GROUND LOOP" PROXIMITY READER Description of Components Electronics Case Reader Vehicle Tag Antenna Reader s Specifications (Characteristics) Power supply
Ground loop reader: LBS type R2 / RS232 type 5C "GROUND LOOP" PROXIMITY READER Description of Components Electronics Case Reader Vehicle Tag Antenna Reader s Specifications (Characteristics) Power supply
Energy Consumption and Latency Analysis for Wireless Multimedia Sensor Networks
 Energy Consumption and Latency Analysis for Wireless Multimedia Sensor Networks Alvaro Pinto, Zhe Zhang, Xin Dong, Senem Velipasalar, M. Can Vuran, M. Cenk Gursoy Electrical Engineering Department, University
Energy Consumption and Latency Analysis for Wireless Multimedia Sensor Networks Alvaro Pinto, Zhe Zhang, Xin Dong, Senem Velipasalar, M. Can Vuran, M. Cenk Gursoy Electrical Engineering Department, University
A BETTER LISTENER EXPERIENCE: HD RADIO TIME AND LEVEL ALIGNMENT
 A BETTER LISTENER EXPERIENCE: HD RADIO TIME AND LEVEL ALIGNMENT NAB Broadcast Engineering Conference - April 17, 2016 1 HD RADIO TECHNOLOGY AND YOUR AUDIENCE More of your listeners are experiencing your
A BETTER LISTENER EXPERIENCE: HD RADIO TIME AND LEVEL ALIGNMENT NAB Broadcast Engineering Conference - April 17, 2016 1 HD RADIO TECHNOLOGY AND YOUR AUDIENCE More of your listeners are experiencing your
Path Planning and Obstacle Avoidance for Boe Bot Mobile Robot
 Path Planning and Obstacle Avoidance for Boe Bot Mobile Robot Mohamed Ghorbel 1, Lobna Amouri 1, Christian Akortia Hie 1 Institute of Electronics and Communication of Sfax (ISECS) ATMS-ENIS,University
Path Planning and Obstacle Avoidance for Boe Bot Mobile Robot Mohamed Ghorbel 1, Lobna Amouri 1, Christian Akortia Hie 1 Institute of Electronics and Communication of Sfax (ISECS) ATMS-ENIS,University
Development of an Experimental Testbed for Multiple Vehicles Formation Flight Control
 Proceedings of the IEEE Conference on Control Applications Toronto, Canada, August 8-, MA6. Development of an Experimental Testbed for Multiple Vehicles Formation Flight Control Jinjun Shan and Hugh H.
Proceedings of the IEEE Conference on Control Applications Toronto, Canada, August 8-, MA6. Development of an Experimental Testbed for Multiple Vehicles Formation Flight Control Jinjun Shan and Hugh H.
A Step Forward in Virtual Reality. Department of Electrical and Computer Engineering
 A Step Forward in Virtual Reality Team Step Ryan Daly Electrical Engineer Jared Ricci Electrical Engineer Joseph Roberts Electrical Engineer Steven So Electrical Engineer 2 Motivation Current Virtual Reality
A Step Forward in Virtual Reality Team Step Ryan Daly Electrical Engineer Jared Ricci Electrical Engineer Joseph Roberts Electrical Engineer Steven So Electrical Engineer 2 Motivation Current Virtual Reality
Embedded Systems Programming Instruction Using a Virtual Testbed
 Embedded Systems Programming Instruction Using a Virtual Testbed Gerald Baumgartner Dept. of Computer and Information Science gb@cis.ohio-state.edu Ali Keyhani Dept. of Electrical Engineering Keyhani.1@osu.edu
Embedded Systems Programming Instruction Using a Virtual Testbed Gerald Baumgartner Dept. of Computer and Information Science gb@cis.ohio-state.edu Ali Keyhani Dept. of Electrical Engineering Keyhani.1@osu.edu