Gregory Bock, Brittany Dhall, Ryan Hendrickson, & Jared Lamkin Project Advisors: Dr. Jing Wang & Dr. In Soo Ahn Department of Electrical and Computer
|
|
|
- Shanon Fowler
- 5 years ago
- Views:
Transcription
1 Gregory Bock, Brittany Dhall, Ryan Hendrickson, & Jared Lamkin Project Advisors: Dr. Jing Wang & Dr. In Soo Ahn Department of Electrical and Computer Engineering March 1 st, 2016
2 Outline 2 I. Introduction II. E-puck Progress Brittany & Jared III. Kilobot Progress - Jared IV. Qbot Progress Ryan & Greg V. Summary & Conclusions
3 I. Introduction 3
4 Problem Description 4 Design cooperative control algorithms for heterogeneous groups of robots Implement algorithms on different robot platforms
5 Objectives 5 Design and Experimental Validation of Cooperative Control Algorithms Sensing/communication between robots Implementation of local flocking control algorithms Implementation of local formation control algorithms
6 Solution 6 Cooperative control algorithm design Linear model Non-linear model Deployment and validation through experimental testing Modular design System integration



7 Algorithm Test Platforms 7 Kilobot E-Puck Qbot
8 Division of Labor Overview 8 Kilobots Jared Individual Behavior Qbots Ryan/Greg E-pucks Brittany Kilobot - Kilobot Jared Individual Communication Qbot - Qbot Ryan/Greg E-puck - E-puck Brittany Kilobot - E-puck Jared/Brittany Integrated Communication Kilobot - Qbot Jared/Ryan/Greg E-puck - Qbot Brittany/Ryan/Greg Algorithm Design Linearization Based Model Jared/Brittany/Ryan/Greg Integrated Behavior Formation Control Behavior Jared/Brittany/Ryan/Greg Flocking Behavior Jared/Brittany/Ryan/Greg Testing Software Implementation Jared/Brittany/Ryan/Greg Hardware Implementation Jared/Brittany/Ryan/Greg
9 II. E-puck Progress - Brittany 9
10 Recap of Last Semester 10 Used IR proximity sensors for object detection Used IR proximity sensors for object following
11 Work Accomplished 11 IR proximity sensors used for communication Un-brick E-pucks Received new batteries for better life of the robot
 https://www.cyberbotics.")
12 IR Proximity Sensors 12 Proximity sensors can send a pulse wave IR receiver circuit detects signal Method to communicate with Kilobots Sent a message (Kilobots could not see it)
13 Example Code for IR Proximity Sensor 13 int main() { long timer = 0; //configure LEDs pin direction PULSE_IR0_DIR = OUTPUT_PIN; LED0_DIR = OUTPUT_PIN; while (1) { } PULSE_IR0 = 0; LED0 = 0; for(timer = 0; timer < DELAY; timer++); PULSE_IR0 = 1; LED0 = 1; for(timer = 0; timer < DELAY; timer++);
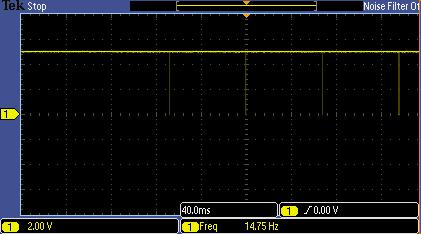
14 Oscilloscope Captures 14


15 Unbricked two E-pucks 15 Used the MPLAB ICD 3
16 Steps to Un-Brick the E-puck 16 Use MPLAB IDE v8.30 E-puck must be turned off to start Open MPLAB IDE v8.30 Remove the top portion of the E-puck Connect the ICD3 to the computer, then to the E- puck

17 Steps to Un-Brick the E-puck 17 Import a basic file into MPLAB Go to Programmer -> Select Programmer -> MPLAB ICD3 Go to Programmer -> Settings -> Program Memory Tab

18 Steps to Un-Brick the E-puck 18 ICD3 Settings Power Tab
19 Steps to Un-Brick the E-puck 19 Select Programmer -> Erase Flash Device When Finished, power cycle the E-puck Select Programmer -> Program
")



20 Problems Encountered 20 Infrared sensor communication (no add-on IR Ring) Communication using the proximity sensors to the Kilobots Fig. 1 E-puck with Add-on IR ring Fig. 2 E-puck without Addon IR ring Fig Fig. 2.
21 Future Work 21 E-puck to E-puck communication Using the E-puck s camera Q-bot to E-puck communication
22 Gantt Chart Future Work 22 Task Name Individual Communication Group Member Responsible for Task Finish by Date/Due Date Dec - 16 Jan-16 Feb-16 Mar-16 Apr Research/Test E-puck - E-puck Brittany December 14, 2015 Integrated Communication Test Kilobot - E-puck Jared/Brittany December 14, 2015 Test E-puck - Qbot Brittany/Ryan/Greg December 14, 2015 Algorithm Design Design Linear Based Model All December 14, 2015 Integrated Behavior Formation Control Behavior Localization All January 25, 2016 Point Convergence All January 25, 2016 Leader Follower All January 25, 2016 Testing Software Implementation All March 7, 2016 Hardware Implementation All March 7, 2016
23 E-puck Progress- Jared 23
24 Color and Object Detection 24 The E-puck CMOS camera is capable of 640X480 resolution, in color or grayscale However, the image is too large to process, so instead we use a 1X120 image Color uses RGB565, where each pixel has 5 bits for red, 6 bits for green, and 5 bits for blue
25 Color and Object Detection 25 First step to object detection is edge detection The image array is searched for two edges, from both left and right starting positions Individual pixels are compared to the average of the previous ten pixels If the difference is greater than three, that location is set as an edge Based on the number of edges found (0,1,2,3,4), The E-puck calculates where the center of the object is, and how wide it is.
26 Color and Object Detection 26 After Edge detection is complete, the E-puck moves on to color comparison The E-puck computes the average RGB value of the object The average is compared to the specified value within a certain tolerance If the comparison is acceptable, The E-puck begins maneuvering to it.
27 III. Kilobot Progress - Jared 27

28 How Kilobots Communicate 28 Use infrared light Reflects light off the floor Measures light intensity to calculate distance Maximum rated range is 7 cm Messages are sent every 200 milliseconds
29 Preparing Messages to send 29 A message is composed of 23 bits (2 full characters, and an even character) A check sum is generated by taking the sum of the bits and 128 All four bytes are operated on Each byte is then shifted left and incremented by 1
30 Sending messages 30 Signal goes high briefly (0.75 microseconds) Signal is then set low for a duration (92.25 microseconds) Each bit is sent: high for 1, low for 0 Signal is set low between each bit ( microseconds per bit) 537 microseconds for entire message to be sent

31 Circuit 31 Used an Atmega128 board from the lab PB0 in series with a 330 ohm resistor and an IR LED
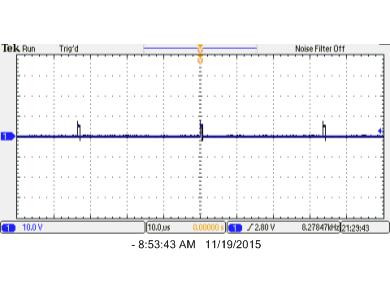
32 Oscilloscope capture 32
33 Initial Testing 33 A Kilobot was programmed to turn its LED green if message was received The Kilobot turns it LED red if message is not received after a set amount of time The IR LED light was reflected off the ground next to the Kilobot

34 Further Testing 34 Kilobot was connected to serial cable and programmed to print message values to hyper terminal Kilobot was placed at measured distances and compared to printed distance
35 Controllable Node 35 A Kilobot programmed to receive orders from an outside source Transmits orders to follower Kilobots to mimic its behavior Only performs orders if at least one follower is within range
36 Follower Nodes 36 Perform order received from controllable node At start up they perform gradient algorithm with other followers Only perform orders received from lowest value follower within range They only move if they are within range of the next lowest follower Transmit gradient value and heading

37 Simulation of Controllable and 37 Follower Nodes
38 Separation and Attraction 38 Kilobots generate a random ID at startup Kilobots then try to separate into two groups, evens and odds Opposites attempt to repulse each other, by orbiting Like attracts If an agent loses contact with others it stops Current issues are collision avoidance

39 Separation and Attraction 39 Simulation
40 Gantt Chart Future Work 40 Task Name Group Member Responsible for Task Finish by Date/Due Date Integrated Communication Test Kilobot - E-puck Jared/Brittany December 14, 2015 Test Kilobot - Qbot Jared/Ryan/Greg November 16, 2015 Test E-puck - Qbot Brittany/Ryan/Greg December 14, 2015 Algorithm Design Design Linear Based Model All December 14, 2015 Integrated Behavior Formation Control Behavior Localization All January 25, 2016 Point Convergence All January 25, 2016 Leader Follower All January 25, 2016 Flocking Behavior Neighbor Repulsion All February 1, 2016 Enpoint Attraction All February 1, 2016 Heading All February 1, 2016 Testing Software Implementation All March 7, 2016 Hardware Implementation All March 7, 2016 Dec-15 Jan-16 Feb-16 Mar-16 Apr
41 III. QBot 2 Progress Ryan & Greg 41
42 Recap of Last Semester 42 Localization Point Consensus Formation
43 Path Following 43 Sinusiodal Motion x = ω x d = ωt y = ω cos x d y d = sin x d v 1 = k x d z 1 + v 2 = k y d z 2 + x y
44 Path Following 44 Circular Motion v 1 = k x d z 1 + v 2 = k y d z 2 + x d = a + rcos t n y d = b + rsin( t n) x = r sin y = r cos t n /n t n /n x y

45 Path Following Figure 8 45
46 QBot Progress - Greg 46
47 Object Avoidance Using Fuzzy Logic 47 Non-binary, degrees of truth Three inputs left side, middle, right side Two outputs left motor, right motor
48 Object Avoidance Using Fuzzy Logic 47 Results

49 Object Avoidance 49
50 Gantt Chart Future Work 51 Task Name Group Member Responsible for Task Finish by Date/Due Date Integrated Communication Test Kilobot - E-puck Jared/Brittany December 14, 2015 Test Kilobot - Qbot Jared/Ryan/Greg November 16, 2015 Test E-puck - Qbot Brittany/Ryan/Greg December 14, 2015 Algorithm Design Design Linear Based Model All December 14, 2015 Integrated Behavior Formation Control Behavior Localization All January 25, 2016 Point Convergence All January 25, 2016 Leader Follower All January 25, 2016 Flocking Behavior Neighbor Repulsion All February 1, 2016 Enpoint Attraction All February 1, 2016 Heading All February 1, 2016 Testing Software Implementation All March 7, 2016 Hardware Implementation All March 7, 2016 Dec- 15 Jan- 16 Feb-16 Mar-16 Apr
51 VIII. Summary & Conclusions 51
52 Summary & Conclusions 52 Design cooperative control algorithms for heterogeneous groups of robots Implement algorithms on different robot platforms Prevent collisions and implement network security Behind Schedule
53 Future Plan of Action 53 Communication between platforms Algorithm design Integrated behavior

54 Gregory Bock, Brittany Dhall, Ryan Hendrickson, & Jared Lamkin Project Advisors: Dr. Jing Wang & Dr. In Soo Ahn Department of Electrical and Computer Engineering October 6 th, 2015
55 Left Side Input

56 Middle Input
57 Left Motor Output
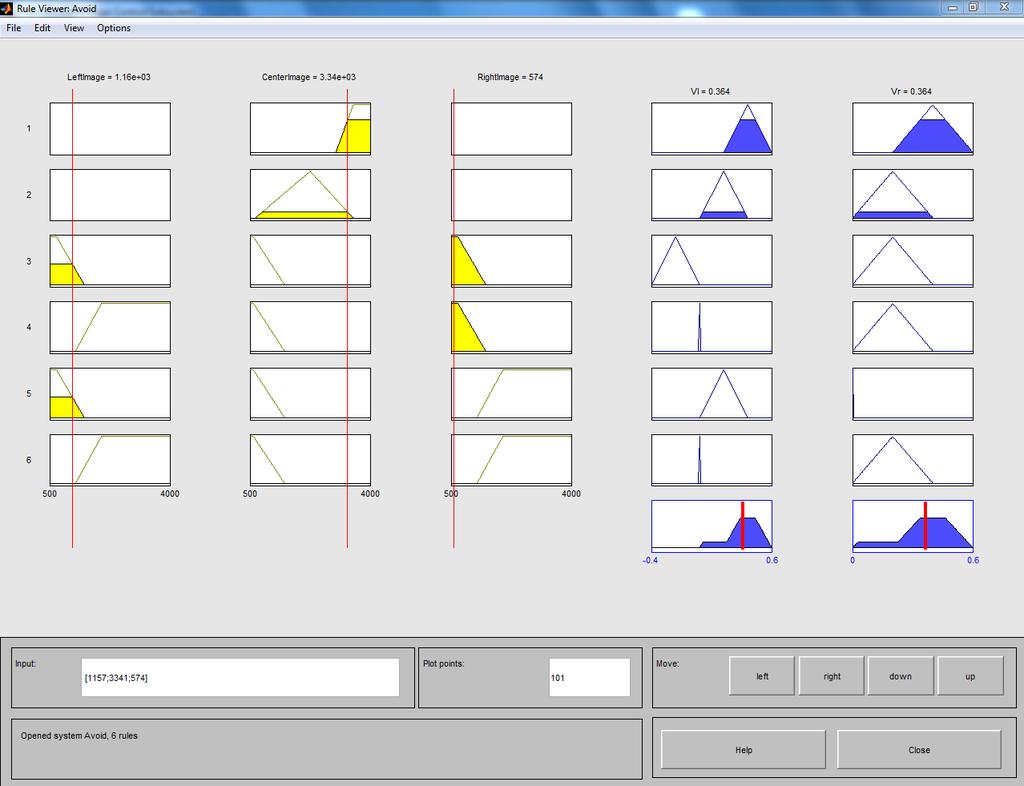
58 Simulation of Rules
59 Design Constraints 59 Must overcome limited communication among networked robots Must overcome limited sensing capability of robots Must overcome system uncertainties
60 Objectives 60 Mobile robot network should be applicable to different robot platforms Mobile robot network should be robust Mobile robot network should be autonomous
61 Solution 61 Cooperative control algorithm design Linear model Non-linear model Deployment and validation through experimental testing Modular design System integration
62 Robot Model 62 Linear Model x = U x y = U y Non-linear Model x = vcos θ y = vsin θ θ = ω
63 Solution Testing 63 Software Implementation Simulation Algorithm validation Algorithm implementation on platforms Hardware Implementation Robot calibration Multiple sensor fusion System Integration Software Hardware
64 Criteria to Determine a Successful 64 Project Algorithm can be deployed on multiple robots Autonomous robots Communication amongst multiple robots

65 Project Funding 65 Air Force Research Lab Air Force Proposal - "Multiagent task coordination using a distributed optimization approach Grant Agreement Number FA
66 Expenses 66 Robotic platforms (software included) Auxiliary components
67 Project Platform Costs 67 Platform Quantity Total Price Qbot2 3 $9, Kilobot Kit 20 $4, Epucks 3 $5,093.00
68 Programming Software Costs 68 Software Quantity Total Price Kilobot Controller IDE 1 $0.00 E-puck Programming Software 1 $0.00 MATLAB Courseware 1 $0.00
69 Gantt Chart 69 Task Name Group Member Responsible for Task Finish by Date Sep-15 Oct-15 Nov-15 Dec-15 Jan-16 Feb-16 Mar-16 Apr Individual Behavior Research Kilobot Sensors Jared September 28, 2015 Research Kilobot Communication Protocol Jared October 12, 2015 Research Q-bot Image Processing Ryan/Greg October 5, 2015 Research Q-bot Sensors Ryan/Greg September 28, 2015 Research Q-bot Communication Protocol Ryan/Greg October 19, 2015 Research E-puck Sensors Brittany October 26, 2015 Research E-puck Communication Protocol Brittany Individual Communication Research/Test Kilobot - Kilobot Jared October 19, 2015 Research/Test E-puck - E-puck Brittany December 14, 2015 Research/Test Qbot - Qbot Ryan/Greg November 2, 2015 Integrated Communication Test Kilobot - E-puck Jared/Brittany December 14, 2015 Test Kilobot - Qbot Jared/Ryan/Greg November 16, 2015 Test E-puck - Qbot Brittany/Ryan/Greg December 14, 2015 Algorithm Design Design Linear Based Model All December 14, 2015 Integrated Behavior Formation Control Behavior Localization All January 25, 2016 Point Convergence All January 25, 2016 Leader Follower All January 25, 2016 Flocking Behavior Neighbor Repulsion All February 1, 2016 Endpoint Attraction All February 1, 2016 Heading All February 1, 2016 Testing Software Implementation All March 7, 2016 Hardware Implementation All March 7, 2016
70 Gantt Chart Deliverables 70 Task Name Finish by Date/Due Date Deliverables Project Proposal - Oral Presentation October 1, 2015 Project Proposal - Document October 15, 2015 Webpage Release October 28, 2015 Fall Progress Presentation November 19, 2015 Fall Performance Evaluation November 19, 2015 Fall Performance Review December 3, 2015 Spring Progress Presentation February 18, 2016 Student Expo Abstract March 18, 2016 Project Demonstration March 24, 2016 Final Presentation April 7, 2016 Student Expo Poster Printing Deadline April 11, 2016 Student Expo Poster Setup April 12, 2016 Student Expo April 14, 2016 Final Report (Draft) April 14, 2016 Final Report April 28, 2016 Final Web Page April 28, 2016 Advisory Board Poster Printing Deadline April 28, 2016 Advisory Board Poster Presentation April 29, 2016 Sep-15 Oct-15 Nov-15 Dec-15 Jan-16 Feb-16 Mar-16 Apr

71 State Diagram: Formation Control 71 Behavior

72 State Diagram: Flocking Formation 72
73 Non-linear Model 73 Quanser Inc. QBOT 2 Workbook Markham, Ontario
74 Linear Model 74 Quanser Inc. QBOT 2 Workbook Markham, Ontario
75 Solution Testing 75
76 E-puck Object Following Code 76
77 Kilobot message operations 77 data_out[i]=(data_to_send[i] & (1<<0))*128 + (data_to_send[i] & (1<<1))*32 + (data_to_send[i] & (1<<2))*8 + (data_to_send[i] & (1<<3))*2+ (data_to_send[i] & (1<<4))/2+ (data_to_send[i] & (1<<5))/8 + (data_to_send[i] & (1<<6))/32 + (data_to_send[i] & (1<<7))/128; data_out[i]=data_out[i]<<1; data_out[i]++;
78 LEDs and Buttons 78 Found LED and Button addresses for reading and writing LEDs can be used for debugging Buttons can be used for synchronous startup
79 QBot Point Convergence Code 79
80 QBot Obtained Angle Equation 80 α = 320 column π 180

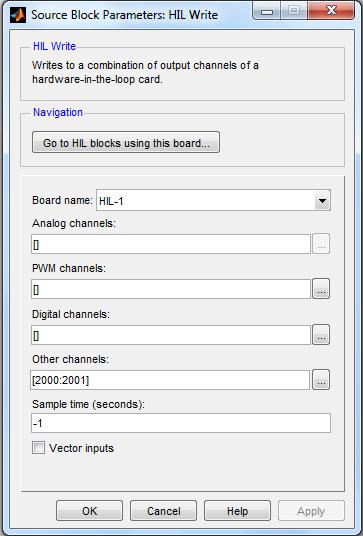
81 HIL Write Block 81

82 Find Object Parameters 82 Specify RGB values Value threshold Number of objects

83 Overall Simulink Model 83
84 Motor Control 84

85 E-puck Tiny Bootloader 85
86 Color Consensus Flowchart 86 Start up Generate random # Color = Random # Message_out(color) Get_message() Update Color Count Red++ Count++ Green++ Count++ Blue++ Count++ If count >= Buffer size Determine most prevalent color Update color Clear Red, Green, Blue, and Count
87 Localization Equations C i = x 0 x i 2 + y 0 y i 2 V i = < x 0 x i, y 0 y i > C i C i n i = x i, y i D i V i x 0, y 0 = x 0, y 0 (x 0 n ix, y 0 n iy ) 4
Single-phase Variable Frequency Switch Gear
 Single-phase Variable Frequency Switch Gear Eric Motyl, Leslie Zeman Advisor: Professor Steven Gutschlag Department of Electrical and Computer Engineering Bradley University, Peoria, IL October 15, 2015
Single-phase Variable Frequency Switch Gear Eric Motyl, Leslie Zeman Advisor: Professor Steven Gutschlag Department of Electrical and Computer Engineering Bradley University, Peoria, IL October 15, 2015
CEEN Bot Lab Design A SENIOR THESIS PROPOSAL
 CEEN Bot Lab Design by Deborah Duran (EENG) Kenneth Townsend (EENG) A SENIOR THESIS PROPOSAL Presented to the Faculty of The Computer and Electronics Engineering Department In Partial Fulfillment of Requirements
CEEN Bot Lab Design by Deborah Duran (EENG) Kenneth Townsend (EENG) A SENIOR THESIS PROPOSAL Presented to the Faculty of The Computer and Electronics Engineering Department In Partial Fulfillment of Requirements
Preliminary Design Report. Project Title: Search and Destroy
 EEL 494 Electrical Engineering Design (Senior Design) Preliminary Design Report 9 April 0 Project Title: Search and Destroy Team Member: Name: Robert Bethea Email: bbethea88@ufl.edu Project Abstract Name:
EEL 494 Electrical Engineering Design (Senior Design) Preliminary Design Report 9 April 0 Project Title: Search and Destroy Team Member: Name: Robert Bethea Email: bbethea88@ufl.edu Project Abstract Name:
E90 Project Proposal. 6 December 2006 Paul Azunre Thomas Murray David Wright
 E90 Project Proposal 6 December 2006 Paul Azunre Thomas Murray David Wright Table of Contents Abstract 3 Introduction..4 Technical Discussion...4 Tracking Input..4 Haptic Feedack.6 Project Implementation....7
E90 Project Proposal 6 December 2006 Paul Azunre Thomas Murray David Wright Table of Contents Abstract 3 Introduction..4 Technical Discussion...4 Tracking Input..4 Haptic Feedack.6 Project Implementation....7
Proposal Smart Vision Sensors for Entomologically Inspired Micro Aerial Vehicles Daniel Black. Advisor: Dr. Reid Harrison
 Proposal Smart Vision Sensors for Entomologically Inspired Micro Aerial Vehicles Daniel Black Advisor: Dr. Reid Harrison Introduction Impressive digital imaging technology has become commonplace in our
Proposal Smart Vision Sensors for Entomologically Inspired Micro Aerial Vehicles Daniel Black Advisor: Dr. Reid Harrison Introduction Impressive digital imaging technology has become commonplace in our
Lesson 13. The Big Idea: Lesson 13: Infrared Transmitters
 Lesson Lesson : Infrared Transmitters The Big Idea: In Lesson 12 the ability to detect infrared radiation modulated at 38,000 Hertz was added to the Arduino. This lesson brings the ability to generate
Lesson Lesson : Infrared Transmitters The Big Idea: In Lesson 12 the ability to detect infrared radiation modulated at 38,000 Hertz was added to the Arduino. This lesson brings the ability to generate
Structure and Synthesis of Robot Motion
 Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
GPS System Design and Control Modeling. Chua Shyan Jin, Ronald. Assoc. Prof Gerard Leng. Aeronautical Engineering Group, NUS
 GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
Single-phase Variable Frequency Switch Gear
 1 Single-phase Variable Frequency Switch Gear Department of Electrical and Computer Engineering Eric Motyl and Leslie Zeman Advisor: Professor Steven D. Gutschlag November 19, 2015 2 Outline Problem Description
1 Single-phase Variable Frequency Switch Gear Department of Electrical and Computer Engineering Eric Motyl and Leslie Zeman Advisor: Professor Steven D. Gutschlag November 19, 2015 2 Outline Problem Description
1 Lab + Hwk 4: Introduction to the e-puck Robot
 1 Lab + Hwk 4: Introduction to the e-puck Robot This laboratory requires the following: (The development tools are already installed on the DISAL virtual machine (Ubuntu Linux) in GR B0 01): C development
1 Lab + Hwk 4: Introduction to the e-puck Robot This laboratory requires the following: (The development tools are already installed on the DISAL virtual machine (Ubuntu Linux) in GR B0 01): C development
Multi robot Team Formation for Distributed Area Coverage. Raj Dasgupta Computer Science Department University of Nebraska, Omaha
 Multi robot Team Formation for Distributed Area Coverage Raj Dasgupta Computer Science Department University of Nebraska, Omaha C MANTIC Lab Collaborative Multi AgeNt/Multi robot Technologies for Intelligent
Multi robot Team Formation for Distributed Area Coverage Raj Dasgupta Computer Science Department University of Nebraska, Omaha C MANTIC Lab Collaborative Multi AgeNt/Multi robot Technologies for Intelligent
Autonomous Robotic Boat Platform
 Autonomous Robotic Boat Platform Team: Ryan Burke, Leah Cramer, Noah Dupes, & Darren McDannald Advisors: Mr. Nick Schmidt, Dr. José Sánchez, & Dr. Gary Dempsey Department of Electrical and Computer Engineering
Autonomous Robotic Boat Platform Team: Ryan Burke, Leah Cramer, Noah Dupes, & Darren McDannald Advisors: Mr. Nick Schmidt, Dr. José Sánchez, & Dr. Gary Dempsey Department of Electrical and Computer Engineering
Persistence of Vision LED Sphere
 Persistence of Vision LED Sphere Project Proposal ECE 445 February 10, 2016 TA: Vivian Hou Michael Ling Li Quan 1 Table of Contents 1.0 Introduction... 3 1.1 Purpose and Motivation:... 3 1.2 Objectives:...
Persistence of Vision LED Sphere Project Proposal ECE 445 February 10, 2016 TA: Vivian Hou Michael Ling Li Quan 1 Table of Contents 1.0 Introduction... 3 1.1 Purpose and Motivation:... 3 1.2 Objectives:...
Biologically-inspired Autonomic Wireless Sensor Networks. Haoliang Wang 12/07/2015
 Biologically-inspired Autonomic Wireless Sensor Networks Haoliang Wang 12/07/2015 Wireless Sensor Networks A collection of tiny and relatively cheap sensor nodes Low cost for large scale deployment Limited
Biologically-inspired Autonomic Wireless Sensor Networks Haoliang Wang 12/07/2015 Wireless Sensor Networks A collection of tiny and relatively cheap sensor nodes Low cost for large scale deployment Limited
Traffic Control for a Swarm of Robots: Avoiding Target Congestion
 Traffic Control for a Swarm of Robots: Avoiding Target Congestion Leandro Soriano Marcolino and Luiz Chaimowicz Abstract One of the main problems in the navigation of robotic swarms is when several robots
Traffic Control for a Swarm of Robots: Avoiding Target Congestion Leandro Soriano Marcolino and Luiz Chaimowicz Abstract One of the main problems in the navigation of robotic swarms is when several robots
Distributed Area Coverage Using Robot Flocks
 Distributed Area Coverage Using Robot Flocks Ke Cheng, Prithviraj Dasgupta and Yi Wang Computer Science Department University of Nebraska, Omaha, NE, USA E-mail: {kcheng,ywang,pdasgupta}@mail.unomaha.edu
Distributed Area Coverage Using Robot Flocks Ke Cheng, Prithviraj Dasgupta and Yi Wang Computer Science Department University of Nebraska, Omaha, NE, USA E-mail: {kcheng,ywang,pdasgupta}@mail.unomaha.edu
Pulse-Width-Modulation Motor Speed Control with a PIC (modified from lab text by Alciatore)
") Laboratory 14 Pulse-Width-Modulation Motor Speed Control with a PIC (modified from lab text by Alciatore) Required Components: 1x PIC 16F88 18P-DIP microcontroller 3x 0.1 F capacitors 1x 12-button numeric
Laboratory 14 Pulse-Width-Modulation Motor Speed Control with a PIC (modified from lab text by Alciatore) Required Components: 1x PIC 16F88 18P-DIP microcontroller 3x 0.1 F capacitors 1x 12-button numeric
Swarm Robotics. Communication and Cooperation over the Internet. Will Ferenc, Hannah Kastein, Lauren Lieu, Ryan Wilson Mentor: Jérôme Gilles
 and Cooperation over the Internet Will Ferenc, Hannah Kastein, Lauren Lieu, Ryan Wilson Mentor: Jérôme Gilles UCLA Applied Mathematics REU 2011 Credit: c 2010 Bruce Avera Hunter, Courtesy of life.nbii.gov
and Cooperation over the Internet Will Ferenc, Hannah Kastein, Lauren Lieu, Ryan Wilson Mentor: Jérôme Gilles UCLA Applied Mathematics REU 2011 Credit: c 2010 Bruce Avera Hunter, Courtesy of life.nbii.gov
Mobile Target Tracking Using Radio Sensor Network
 Mobile Target Tracking Using Radio Sensor Network Nic Auth Grant Hovey Advisor: Dr. Suruz Miah Department of Electrical and Computer Engineering Bradley University 1501 W. Bradley Avenue Peoria, IL, 61625,
Mobile Target Tracking Using Radio Sensor Network Nic Auth Grant Hovey Advisor: Dr. Suruz Miah Department of Electrical and Computer Engineering Bradley University 1501 W. Bradley Avenue Peoria, IL, 61625,
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts
 Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Lab 8: Introduction to the e-puck Robot
 Lab 8: Introduction to the e-puck Robot This laboratory requires the following equipment: C development tools (gcc, make, etc.) C30 programming tools for the e-puck robot The development tree which is
Lab 8: Introduction to the e-puck Robot This laboratory requires the following equipment: C development tools (gcc, make, etc.) C30 programming tools for the e-puck robot The development tree which is
Spring 2005 Group 6 Final Report EZ Park
 18-551 Spring 2005 Group 6 Final Report EZ Park Paul Li cpli@andrew.cmu.edu Ivan Ng civan@andrew.cmu.edu Victoria Chen vchen@andrew.cmu.edu -1- Table of Content INTRODUCTION... 3 PROBLEM... 3 SOLUTION...
18-551 Spring 2005 Group 6 Final Report EZ Park Paul Li cpli@andrew.cmu.edu Ivan Ng civan@andrew.cmu.edu Victoria Chen vchen@andrew.cmu.edu -1- Table of Content INTRODUCTION... 3 PROBLEM... 3 SOLUTION...
Today s Menu. Near Infrared Sensors
 Today s Menu Near Infrared Sensors CdS Cells Programming Simple Behaviors 1 Near-Infrared Sensors Infrared (IR) Sensors > Near-infrared proximity sensors are called IRs for short. These devices are insensitive
Today s Menu Near Infrared Sensors CdS Cells Programming Simple Behaviors 1 Near-Infrared Sensors Infrared (IR) Sensors > Near-infrared proximity sensors are called IRs for short. These devices are insensitive
Workshops Elisava Introduction to programming and electronics (Scratch & Arduino)
") Workshops Elisava 2011 Introduction to programming and electronics (Scratch & Arduino) What is programming? Make an algorithm to do something in a specific language programming. Algorithm: a procedure
Workshops Elisava 2011 Introduction to programming and electronics (Scratch & Arduino) What is programming? Make an algorithm to do something in a specific language programming. Algorithm: a procedure
Marine Debris Cleaner Phase 1 Navigation
 Southeastern Louisiana University Marine Debris Cleaner Phase 1 Navigation Submitted as partial fulfillment for the senior design project By Ryan Fabre & Brock Dickinson ET 494 Advisor: Dr. Ahmad Fayed
Southeastern Louisiana University Marine Debris Cleaner Phase 1 Navigation Submitted as partial fulfillment for the senior design project By Ryan Fabre & Brock Dickinson ET 494 Advisor: Dr. Ahmad Fayed
Project Name: SpyBot
 EEL 4924 Electrical Engineering Design (Senior Design) Final Report April 23, 2013 Project Name: SpyBot Team Members: Name: Josh Kurland Name: Parker Karaus Email: joshkrlnd@gmail.com Email: pbkaraus@ufl.edu
EEL 4924 Electrical Engineering Design (Senior Design) Final Report April 23, 2013 Project Name: SpyBot Team Members: Name: Josh Kurland Name: Parker Karaus Email: joshkrlnd@gmail.com Email: pbkaraus@ufl.edu
LDOR: Laser Directed Object Retrieving Robot. Final Report
 University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory LDOR: Laser Directed Object Retrieving Robot Final Report 4/22/08 Mike Arms TA: Mike
University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory LDOR: Laser Directed Object Retrieving Robot Final Report 4/22/08 Mike Arms TA: Mike
Emergent Behavior Robot
 Emergent Behavior Robot Functional Description and Complete System Block Diagram By: Andrew Elliott & Nick Hanauer Project Advisor: Joel Schipper December 6, 2009 Introduction The objective of this project
Emergent Behavior Robot Functional Description and Complete System Block Diagram By: Andrew Elliott & Nick Hanauer Project Advisor: Joel Schipper December 6, 2009 Introduction The objective of this project
Real-time Cooperative Behavior for Tactical Mobile Robot Teams. September 10, 1998 Ronald C. Arkin and Thomas R. Collins Georgia Tech
 Real-time Cooperative Behavior for Tactical Mobile Robot Teams September 10, 1998 Ronald C. Arkin and Thomas R. Collins Georgia Tech Objectives Build upon previous work with multiagent robotic behaviors
Real-time Cooperative Behavior for Tactical Mobile Robot Teams September 10, 1998 Ronald C. Arkin and Thomas R. Collins Georgia Tech Objectives Build upon previous work with multiagent robotic behaviors
Vision based Object Recognition of E-Puck Mobile Robot for Warehouse Application
 International Journal of Integrated Engineering, Vol. 6 No. 3 (2014) p. 65-76 Vision based Object Recognition of E-Puck Mobile Robot for Warehouse Application Mehmet S. Guzel 1, John Erwin 2,*, Wan Nurshazwani
International Journal of Integrated Engineering, Vol. 6 No. 3 (2014) p. 65-76 Vision based Object Recognition of E-Puck Mobile Robot for Warehouse Application Mehmet S. Guzel 1, John Erwin 2,*, Wan Nurshazwani
Fuzzy Logic Based Intelligent Control of RGB Colour Classification System for Undergraduate Artificial Intelligence Laboratory
 , July 4-6, 2012, London, U.K. Fuzzy Logic Based Intelligent Control of RGB Colour Classification System for Undergraduate Artificial Intelligence Laboratory M. F. Abu Hassan, Y. Yusof, M.A. Azmi, and
, July 4-6, 2012, London, U.K. Fuzzy Logic Based Intelligent Control of RGB Colour Classification System for Undergraduate Artificial Intelligence Laboratory M. F. Abu Hassan, Y. Yusof, M.A. Azmi, and
WCNN. Wireless Camera Node Network. Midway Design Review December 1, 2014
 WCNN Wireless Camera Node Network Midway Design Review December 1, 2014 PDR Recap: What is the problem? Many wildlife species are becoming endangered Need to study their behaviors to help them better cope
WCNN Wireless Camera Node Network Midway Design Review December 1, 2014 PDR Recap: What is the problem? Many wildlife species are becoming endangered Need to study their behaviors to help them better cope
Experiment P-24 Circuits and Series Resistance
 1 Experiment P-24 Circuits and Series Resistance Objectives To study the relationship between the voltage applied to a given resistor and the intensity of the current running through it. Modules and Sensors
1 Experiment P-24 Circuits and Series Resistance Objectives To study the relationship between the voltage applied to a given resistor and the intensity of the current running through it. Modules and Sensors
Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic
 Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
BEYOND TOYS. Wireless sensor extension pack. Tom Frissen s
 LEGO BEYOND TOYS Wireless sensor extension pack Tom Frissen s040915 t.e.l.n.frissen@student.tue.nl December 2008 Faculty of Industrial Design Eindhoven University of Technology 1 2 TABLE OF CONTENT CLASS
LEGO BEYOND TOYS Wireless sensor extension pack Tom Frissen s040915 t.e.l.n.frissen@student.tue.nl December 2008 Faculty of Industrial Design Eindhoven University of Technology 1 2 TABLE OF CONTENT CLASS
Welcome to Arduino Day 2016
 Welcome to Arduino Day 2016 An Intro to Arduino From Zero to Hero in an Hour! Paul Court (aka @Courty) Welcome to the SLMS Arduino Day 2016 Arduino / Genuino?! What?? Part 1 Intro Quick Look at the Uno
Welcome to Arduino Day 2016 An Intro to Arduino From Zero to Hero in an Hour! Paul Court (aka @Courty) Welcome to the SLMS Arduino Day 2016 Arduino / Genuino?! What?? Part 1 Intro Quick Look at the Uno
CURIE Academy, Summer 2014 Lab 2: Computer Engineering Software Perspective Sign-Off Sheet
 Lab : Computer Engineering Software Perspective Sign-Off Sheet NAME: NAME: DATE: Sign-Off Milestone TA Initials Part 1.A Part 1.B Part.A Part.B Part.C Part 3.A Part 3.B Part 3.C Test Simple Addition Program
Lab : Computer Engineering Software Perspective Sign-Off Sheet NAME: NAME: DATE: Sign-Off Milestone TA Initials Part 1.A Part 1.B Part.A Part.B Part.C Part 3.A Part 3.B Part 3.C Test Simple Addition Program
Column-Parallel Architecture for Line-of-Sight Detection Image Sensor Based on Centroid Calculation
 ITE Trans. on MTA Vol. 2, No. 2, pp. 161-166 (2014) Copyright 2014 by ITE Transactions on Media Technology and Applications (MTA) Column-Parallel Architecture for Line-of-Sight Detection Image Sensor Based
ITE Trans. on MTA Vol. 2, No. 2, pp. 161-166 (2014) Copyright 2014 by ITE Transactions on Media Technology and Applications (MTA) Column-Parallel Architecture for Line-of-Sight Detection Image Sensor Based
Final Report for AOARD Grant FA Indoor Localization and Positioning through Signal of Opportunities. Date: 14 th June 2013
 Final Report for AOARD Grant FA2386-11-1-4117 Indoor Localization and Positioning through Signal of Opportunities Date: 14 th June 2013 Name of Principal Investigators (PI and Co-PIs): Dr Law Choi Look
Final Report for AOARD Grant FA2386-11-1-4117 Indoor Localization and Positioning through Signal of Opportunities Date: 14 th June 2013 Name of Principal Investigators (PI and Co-PIs): Dr Law Choi Look
Experiment 4.B. Position Control. ECEN 2270 Electronics Design Laboratory 1
 Experiment 4.B Position Control Electronics Design Laboratory 1 Procedures 4.B.1 4.B.2 4.B.3 4.B.4 Read Encoder with Arduino Position Control by Counting Encoder Pulses Demo Setup Extra Credit Electronics
Experiment 4.B Position Control Electronics Design Laboratory 1 Procedures 4.B.1 4.B.2 4.B.3 4.B.4 Read Encoder with Arduino Position Control by Counting Encoder Pulses Demo Setup Extra Credit Electronics
PRELIMINARY DESIGN REPORT
 PRELIMINARY DESIGN REPORT Dodge This! DODGERS: Cristobal Rivero Derek Fairbanks 1/27/2009 Abstract: Our project is to develop an automatic dodge ball game. It consists of an infrared video camera, computer,
PRELIMINARY DESIGN REPORT Dodge This! DODGERS: Cristobal Rivero Derek Fairbanks 1/27/2009 Abstract: Our project is to develop an automatic dodge ball game. It consists of an infrared video camera, computer,
Imaging serial interface ROM
 Page 1 of 6 ( 3 of 32 ) United States Patent Application 20070024904 Kind Code A1 Baer; Richard L. ; et al. February 1, 2007 Imaging serial interface ROM Abstract Imaging serial interface ROM (ISIROM).
Page 1 of 6 ( 3 of 32 ) United States Patent Application 20070024904 Kind Code A1 Baer; Richard L. ; et al. February 1, 2007 Imaging serial interface ROM Abstract Imaging serial interface ROM (ISIROM).
Development of the FVTX trigger
 Development of the FVTX trigger Rikkyo University Toru Nagashima Nov.7 2014 RadLab student seminar 1 OVERVIEW Physics motivation Test bench setup in RIKEN Timing measurement FVTX trigger design Trigger
Development of the FVTX trigger Rikkyo University Toru Nagashima Nov.7 2014 RadLab student seminar 1 OVERVIEW Physics motivation Test bench setup in RIKEN Timing measurement FVTX trigger design Trigger
Real Time Traffic Light Control System Using Image Processing
 Real Time Traffic Light Control System Using Image Processing Darshan J #1, Siddhesh L. #2, Hitesh B. #3, Pratik S.#4 Department of Electronics and Telecommunications Student of KC College Of Engineering
Real Time Traffic Light Control System Using Image Processing Darshan J #1, Siddhesh L. #2, Hitesh B. #3, Pratik S.#4 Department of Electronics and Telecommunications Student of KC College Of Engineering
Design of an electronic platform based on FPGA-DSP for motion control applications
 Design of an electronic platform based on FPGA-DSP for motion control applications Carlos Torres-Hernandez, Juvenal Rodriguez-Resendiz, Universidad Autónoma de Querétaro Cerro de Las Campanas, s/n, Las
Design of an electronic platform based on FPGA-DSP for motion control applications Carlos Torres-Hernandez, Juvenal Rodriguez-Resendiz, Universidad Autónoma de Querétaro Cerro de Las Campanas, s/n, Las
Kilobot: A Robotic Module for Demonstrating Behaviors in a Large Scale (\(2^{10}\) Units) Collective
 Units) Collective") Kilobot: A Robotic Module for Demonstrating Behaviors in a Large Scale (\(2^{10}\) Units) Collective The Harvard community has made this article openly available. Please share how this access benefits
Kilobot: A Robotic Module for Demonstrating Behaviors in a Large Scale (\(2^{10}\) Units) Collective The Harvard community has made this article openly available. Please share how this access benefits
WifiBotics. An Arduino Based Robotics Workshop
 WifiBotics An Arduino Based Robotics Workshop WifiBotics is the workshop designed by RoboKart group pioneers in this field way back in 2014 and copied by many competitors. This workshop is based on the
WifiBotics An Arduino Based Robotics Workshop WifiBotics is the workshop designed by RoboKart group pioneers in this field way back in 2014 and copied by many competitors. This workshop is based on the
Rochester Institute of Technology Real Time and Embedded Systems: Project 2a
 Rochester Institute of Technology Real Time and Embedded Systems: Project 2a Overview: Design and implement a STM32 Discovery board program exhibiting multitasking characteristics in simultaneously controlling
Rochester Institute of Technology Real Time and Embedded Systems: Project 2a Overview: Design and implement a STM32 Discovery board program exhibiting multitasking characteristics in simultaneously controlling
Overview of Message Passing Algorithms for Cooperative Localization in UWB wireless networks. Samuel Van de Velde
 Overview of Message Passing Algorithms for Cooperative Localization in UWB wireless networks Samuel Van de Velde Samuel.VandeVelde@telin.ugent.be Promotor: Heidi Steendam Co-promotor Marc Moeneclaey, Henk
Overview of Message Passing Algorithms for Cooperative Localization in UWB wireless networks Samuel Van de Velde Samuel.VandeVelde@telin.ugent.be Promotor: Heidi Steendam Co-promotor Marc Moeneclaey, Henk
Robot Team Formation Control using Communication "Throughput Approach"
 University of Denver Digital Commons @ DU Electronic Theses and Dissertations Graduate Studies 1-1-2013 Robot Team Formation Control using Communication "Throughput Approach" FatmaZahra Ahmed BenHalim
University of Denver Digital Commons @ DU Electronic Theses and Dissertations Graduate Studies 1-1-2013 Robot Team Formation Control using Communication "Throughput Approach" FatmaZahra Ahmed BenHalim
Sandia National Laboratories Clinic Team
 Sandia National Laboratories Clinic Team Matt Strum (Zach Smart, Jake Scheid, Jacob Fawson, and Ali Aldarwish) Advisor Behrouz Farhang Final Project Proposal May 4, 2011 Contents Functional Description...
Sandia National Laboratories Clinic Team Matt Strum (Zach Smart, Jake Scheid, Jacob Fawson, and Ali Aldarwish) Advisor Behrouz Farhang Final Project Proposal May 4, 2011 Contents Functional Description...
Lab 2: Blinkie Lab. Objectives. Materials. Theory
 Lab 2: Blinkie Lab Objectives This lab introduces the Arduino Uno as students will need to use the Arduino to control their final robot. Students will build a basic circuit on their prototyping board and
Lab 2: Blinkie Lab Objectives This lab introduces the Arduino Uno as students will need to use the Arduino to control their final robot. Students will build a basic circuit on their prototyping board and
ENERGY EFFICIENT SENSOR NODE DESIGN IN WIRELESS SENSOR NETWORKS
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 3, Issue. 4, April 2014,
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 3, Issue. 4, April 2014,
Industrial Automation Training Academy. Arduino, LabVIEW & PLC Training Programs Duration: 6 Months (180 ~ 240 Hours)
") nfi Industrial Automation Training Academy Presents Arduino, LabVIEW & PLC Training Programs Duration: 6 Months (180 ~ 240 Hours) For: Electronics & Communication Engineering Electrical Engineering Instrumentation
nfi Industrial Automation Training Academy Presents Arduino, LabVIEW & PLC Training Programs Duration: 6 Months (180 ~ 240 Hours) For: Electronics & Communication Engineering Electrical Engineering Instrumentation
FTSP Power Characterization
 1. Introduction FTSP Power Characterization Chris Trezzo Tyler Netherland Over the last few decades, advancements in technology have allowed for small lowpowered devices that can accomplish a multitude
1. Introduction FTSP Power Characterization Chris Trezzo Tyler Netherland Over the last few decades, advancements in technology have allowed for small lowpowered devices that can accomplish a multitude
EE 314 Spring 2003 Microprocessor Systems
 EE 314 Spring 2003 Microprocessor Systems Laboratory Project #9 Closed Loop Control Overview and Introduction This project will bring together several pieces of software and draw on knowledge gained in
EE 314 Spring 2003 Microprocessor Systems Laboratory Project #9 Closed Loop Control Overview and Introduction This project will bring together several pieces of software and draw on knowledge gained in
Chapter 14. using data wires
 Chapter 14. using data wires In this fifth part of the book, you ll learn how to use data wires (this chapter), Data Operations blocks (Chapter 15), and variables (Chapter 16) to create more advanced programs
Chapter 14. using data wires In this fifth part of the book, you ll learn how to use data wires (this chapter), Data Operations blocks (Chapter 15), and variables (Chapter 16) to create more advanced programs
TRDB_DC2 TRDB_DC2. 1.3Mega Pixel Digital Camera Development Kit
 Terasic TRDB_DC2 Digital Camera Package TRDB_DC2 1.3Mega Pixel Digital Camera Development Kit Frame grabber with VGA display reference design For Altera DE2 and Terasic T-Rex C1 Boards TRDB_DC2 Document
Terasic TRDB_DC2 Digital Camera Package TRDB_DC2 1.3Mega Pixel Digital Camera Development Kit Frame grabber with VGA display reference design For Altera DE2 and Terasic T-Rex C1 Boards TRDB_DC2 Document
Mapping device with wireless communication
 University of Arkansas, Fayetteville ScholarWorks@UARK Electrical Engineering Undergraduate Honors Theses Electrical Engineering 12-2011 Mapping device with wireless communication Xiangyu Liu University
University of Arkansas, Fayetteville ScholarWorks@UARK Electrical Engineering Undergraduate Honors Theses Electrical Engineering 12-2011 Mapping device with wireless communication Xiangyu Liu University
Overview of Challenges in the Development of Autonomous Mobile Robots. August 23, 2011
 Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
MN5020HS Smart GPS Antenna Module
 1 Description The Micro Modular Technologies MN5020HS Smart Global Positioning System (GPS) Antenna Module is a complete 20-channel receiver with an integrated 18 x 18 mm patch antenna. With this highly
1 Description The Micro Modular Technologies MN5020HS Smart Global Positioning System (GPS) Antenna Module is a complete 20-channel receiver with an integrated 18 x 18 mm patch antenna. With this highly
UTILIZATION OF ROBOTICS AS CONTEMPORARY TECHNOLOGY AND AN EFFECTIVE TOOL IN TEACHING COMPUTER PROGRAMMING
 UTILIZATION OF ROBOTICS AS CONTEMPORARY TECHNOLOGY AND AN EFFECTIVE TOOL IN TEACHING COMPUTER PROGRAMMING Aaron R. Rababaah* 1, Ahmad A. Rabaa i 2 1 arababaah@auk.edu.kw 2 arabaai@auk.edu.kw Abstract Traditional
UTILIZATION OF ROBOTICS AS CONTEMPORARY TECHNOLOGY AND AN EFFECTIVE TOOL IN TEACHING COMPUTER PROGRAMMING Aaron R. Rababaah* 1, Ahmad A. Rabaa i 2 1 arababaah@auk.edu.kw 2 arabaai@auk.edu.kw Abstract Traditional
CHAPTER 4 FUZZY LOGIC CONTROLLER
 62 CHAPTER 4 FUZZY LOGIC CONTROLLER 4.1 INTRODUCTION Unlike digital logic, the Fuzzy Logic is a multivalued logic. It deals with approximate perceptive rather than precise. The effective and efficient
62 CHAPTER 4 FUZZY LOGIC CONTROLLER 4.1 INTRODUCTION Unlike digital logic, the Fuzzy Logic is a multivalued logic. It deals with approximate perceptive rather than precise. The effective and efficient
745 Transformer Protection System Communications Guide
 Digital Energy Multilin 745 Transformer Protection System Communications Guide 745 revision: 5.20 GE publication code: GEK-106636E GE Multilin part number: 1601-0162-A6 Copyright 2010 GE Multilin GE Multilin
Digital Energy Multilin 745 Transformer Protection System Communications Guide 745 revision: 5.20 GE publication code: GEK-106636E GE Multilin part number: 1601-0162-A6 Copyright 2010 GE Multilin GE Multilin
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
FPGA-BASED HARDWARE EMULATION ARCADE SYSTEM PROJECT PLAN
 FPGA-BASED HARDWARE EMULATION ARCADE SYSTEM PROJECT PLAN May 11-14 Tony Milosch, Cory Mohling, Danny Funk, David Gartner, John Alexander Client: Joseph Zambreno Advisor: Phillip Jones TABLE OF CONTENTS
FPGA-BASED HARDWARE EMULATION ARCADE SYSTEM PROJECT PLAN May 11-14 Tony Milosch, Cory Mohling, Danny Funk, David Gartner, John Alexander Client: Joseph Zambreno Advisor: Phillip Jones TABLE OF CONTENTS
CSC C85 Embedded Systems Project # 1 Robot Localization
 1 The goal of this project is to apply the ideas we have discussed in lecture to a real-world robot localization task. You will be working with Lego NXT robots, and you will have to find ways to work around
1 The goal of this project is to apply the ideas we have discussed in lecture to a real-world robot localization task. You will be working with Lego NXT robots, and you will have to find ways to work around
Distributed Intelligence in Autonomous Robotics. Assignment #1 Out: Thursday, January 16, 2003 Due: Tuesday, January 28, 2003
 Distributed Intelligence in Autonomous Robotics Assignment #1 Out: Thursday, January 16, 2003 Due: Tuesday, January 28, 2003 The purpose of this assignment is to build familiarity with the Nomad200 robotic
Distributed Intelligence in Autonomous Robotics Assignment #1 Out: Thursday, January 16, 2003 Due: Tuesday, January 28, 2003 The purpose of this assignment is to build familiarity with the Nomad200 robotic
Trade-offs Between Mobility and Density for Coverage in Wireless Sensor Networks. Wei Wang, Vikram Srinivasan, Kee-Chaing Chua
 Trade-offs Between Mobility and Density for Coverage in Wireless Sensor Networks Wei Wang, Vikram Srinivasan, Kee-Chaing Chua Coverage in sensor networks Sensors are often randomly scattered in the field
Trade-offs Between Mobility and Density for Coverage in Wireless Sensor Networks Wei Wang, Vikram Srinivasan, Kee-Chaing Chua Coverage in sensor networks Sensors are often randomly scattered in the field
Hello, and welcome to this presentation of the STM32 Infrared Timer. Features of this interface allowing the generation of various IR remote control
 Hello, and welcome to this presentation of the STM32 Infrared Timer. Features of this interface allowing the generation of various IR remote control protocols will be presented. 1 The Infrared Timer peripheral
Hello, and welcome to this presentation of the STM32 Infrared Timer. Features of this interface allowing the generation of various IR remote control protocols will be presented. 1 The Infrared Timer peripheral
Sensors. CS Embedded Systems p. 1/1
 CS 445 - Embedded Systems p. 1/1 Sensors A device that provides measurements of a physical process. Many sensors are transducers, devices that convert energy from one form to another. Examples: Pressure
CS 445 - Embedded Systems p. 1/1 Sensors A device that provides measurements of a physical process. Many sensors are transducers, devices that convert energy from one form to another. Examples: Pressure
Using Z8 Encore! XP MCU for RMS Calculation
 Application te Using Z8 Encore! XP MCU for RMS Calculation Abstract This application note discusses an algorithm for computing the Root Mean Square (RMS) value of a sinusoidal AC input signal using the
Application te Using Z8 Encore! XP MCU for RMS Calculation Abstract This application note discusses an algorithm for computing the Root Mean Square (RMS) value of a sinusoidal AC input signal using the
Open Source Digital Camera on Field Programmable Gate Arrays
 Open Source Digital Camera on Field Programmable Gate Arrays Cristinel Ababei, Shaun Duerr, Joe Ebel, Russell Marineau, Milad Ghorbani Moghaddam, and Tanzania Sewell Department of Electrical and Computer
Open Source Digital Camera on Field Programmable Gate Arrays Cristinel Ababei, Shaun Duerr, Joe Ebel, Russell Marineau, Milad Ghorbani Moghaddam, and Tanzania Sewell Department of Electrical and Computer
1,024 Kilobot Robots Studying Collective Behaviors & Swarm Intelligence with Little Bitty Robots
 NJIT 1,024 Kilobot Robots Studying Collective Behaviors & Swarm Intelligence with Little Bitty Robots From ant colonies to how cells cooperate to form complex patterns, New Jersey Institute of Technology(NJIT)
NJIT 1,024 Kilobot Robots Studying Collective Behaviors & Swarm Intelligence with Little Bitty Robots From ant colonies to how cells cooperate to form complex patterns, New Jersey Institute of Technology(NJIT)
Presentation Outline. Advisors: Dr. In Soo Ahn Dr. Thomas L. Stewart. Team Members: Luke Vercimak Karl Weyeneth
 Bradley University Department of Electrical and Computer Engineering Senior Capstone Project Proposal December 6 th, 2005 Team Members: Luke Vercimak Karl Weyeneth Advisors: Dr. In Soo Ahn Dr. Thomas L.
Bradley University Department of Electrical and Computer Engineering Senior Capstone Project Proposal December 6 th, 2005 Team Members: Luke Vercimak Karl Weyeneth Advisors: Dr. In Soo Ahn Dr. Thomas L.
High Impedance Fault Detection and Location in a Power Transmission Line Using ZIGBEE
 High Impedance Fault Detection and Location in a Power Transmission Line Using ZIGBEE J.Gopinath, A.V.Manirathnam, K.Manoj Kumar, C.Murugan M. Tech, Dept. of ECE, VELTECH, Chennai, India ABSTRACT: An effective
High Impedance Fault Detection and Location in a Power Transmission Line Using ZIGBEE J.Gopinath, A.V.Manirathnam, K.Manoj Kumar, C.Murugan M. Tech, Dept. of ECE, VELTECH, Chennai, India ABSTRACT: An effective
Node Deployment Strategies and Coverage Prediction in 3D Wireless Sensor Network with Scheduling
 Advances in Computational Sciences and Technology ISSN 0973-6107 Volume 10, Number 8 (2017) pp. 2243-2255 Research India Publications http://www.ripublication.com Node Deployment Strategies and Coverage
Advances in Computational Sciences and Technology ISSN 0973-6107 Volume 10, Number 8 (2017) pp. 2243-2255 Research India Publications http://www.ripublication.com Node Deployment Strategies and Coverage
Project Final Report: Directional Remote Control
 Project Final Report: by Luca Zappaterra xxxx@gwu.edu CS 297 Embedded Systems The George Washington University April 25, 2010 Project Abstract In the project, a prototype of TV remote control which reacts
Project Final Report: by Luca Zappaterra xxxx@gwu.edu CS 297 Embedded Systems The George Washington University April 25, 2010 Project Abstract In the project, a prototype of TV remote control which reacts
KUMU A O CUBESAT: THERMAL SENSORS ON A CUBESAT
 KUMU A O CUBESAT: THERMAL SENSORS ON A CUBESAT Tyson K. Seto-Mook Department of Electrical Engineering University of Hawai i at Mānoa Honolulu, HI 96822 INTRODUCTION A. Abstract CubeSat is a project that
KUMU A O CUBESAT: THERMAL SENSORS ON A CUBESAT Tyson K. Seto-Mook Department of Electrical Engineering University of Hawai i at Mānoa Honolulu, HI 96822 INTRODUCTION A. Abstract CubeSat is a project that
PWM LED Color Control
 1 PWM LED Color Control Through the use temperature sensors, accelerometers, and switches to finely control colors. Daniyah Alaswad, Joshua Creech, Gurashish Grewal, & Yang Lu Electrical and Computer Engineering
1 PWM LED Color Control Through the use temperature sensors, accelerometers, and switches to finely control colors. Daniyah Alaswad, Joshua Creech, Gurashish Grewal, & Yang Lu Electrical and Computer Engineering
An Analog Phase-Locked Loop
 1 An Analog Phase-Locked Loop Greg Flewelling ABSTRACT This report discusses the design, simulation, and layout of an Analog Phase-Locked Loop (APLL). The circuit consists of five major parts: A differential
1 An Analog Phase-Locked Loop Greg Flewelling ABSTRACT This report discusses the design, simulation, and layout of an Analog Phase-Locked Loop (APLL). The circuit consists of five major parts: A differential
AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1
 AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1 Jorge Paiva Luís Tavares João Silva Sequeira Institute for Systems and Robotics Institute for Systems and Robotics Instituto Superior Técnico,
AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1 Jorge Paiva Luís Tavares João Silva Sequeira Institute for Systems and Robotics Institute for Systems and Robotics Instituto Superior Técnico,
This study provides models for various components of study: (1) mobile robots with on-board sensors (2) communication, (3) the S-Net (includes computa
 mobile robots with on-board sensors (2) communication, (3) the S-Net (includes computa") S-NETS: Smart Sensor Networks Yu Chen University of Utah Salt Lake City, UT 84112 USA yuchen@cs.utah.edu Thomas C. Henderson University of Utah Salt Lake City, UT 84112 USA tch@cs.utah.edu Abstract: The
S-NETS: Smart Sensor Networks Yu Chen University of Utah Salt Lake City, UT 84112 USA yuchen@cs.utah.edu Thomas C. Henderson University of Utah Salt Lake City, UT 84112 USA tch@cs.utah.edu Abstract: The
Turtlebot Laser Tag. Jason Grant, Joe Thompson {jgrant3, University of Notre Dame Notre Dame, IN 46556
 Turtlebot Laser Tag Turtlebot Laser Tag was a collaborative project between Team 1 and Team 7 to create an interactive and autonomous game of laser tag. Turtlebots communicated through a central ROS server
Turtlebot Laser Tag Turtlebot Laser Tag was a collaborative project between Team 1 and Team 7 to create an interactive and autonomous game of laser tag. Turtlebots communicated through a central ROS server
Location Estimation in Ad-Hoc Networks with Directional Antennas
 Location Estimation in Ad-Hoc Networks with Directional Antennas Nipoon Malhotra, Mark Krasniewski, Chin-Lung Yang, Saurabh Bagchi, William Chappell School of Electrical and Computer Engineering Purdue
Location Estimation in Ad-Hoc Networks with Directional Antennas Nipoon Malhotra, Mark Krasniewski, Chin-Lung Yang, Saurabh Bagchi, William Chappell School of Electrical and Computer Engineering Purdue
Big Blue Mars Final Report
 Big Blue Mars Final Report Member Names Kyle Hart Dale McClure Michael McEwen Contact Information hartman1000@hotmail.com michaelmce@yahoo.com dale.mcclure@uky.edu 2006-04-02 Faculty Advisor Dr. Bill Smith
Big Blue Mars Final Report Member Names Kyle Hart Dale McClure Michael McEwen Contact Information hartman1000@hotmail.com michaelmce@yahoo.com dale.mcclure@uky.edu 2006-04-02 Faculty Advisor Dr. Bill Smith
BULLET SPOT DIMENSION ANALYZER USING IMAGE PROCESSING
 BULLET SPOT DIMENSION ANALYZER USING IMAGE PROCESSING Hitesh Pahuja 1, Gurpreet singh 2 1,2 Assistant Professor, Department of ECE, RIMT, Mandi Gobindgarh, India ABSTRACT In this paper, we proposed the
BULLET SPOT DIMENSION ANALYZER USING IMAGE PROCESSING Hitesh Pahuja 1, Gurpreet singh 2 1,2 Assistant Professor, Department of ECE, RIMT, Mandi Gobindgarh, India ABSTRACT In this paper, we proposed the
Evaluation Kit: MPS 160 ASIC. Magneto Encoder ASIC
 Evaluation Kit: MPS 160 ASIC Magneto Encoder ASIC Table of Contents 1. Overview 2. Mounting Instructions 2.1. Sensor Orientation 2.2. Pitch Radius 2.3. Air Gap 3. Magnetic Target 4. Output 4.1. Optional
Evaluation Kit: MPS 160 ASIC Magneto Encoder ASIC Table of Contents 1. Overview 2. Mounting Instructions 2.1. Sensor Orientation 2.2. Pitch Radius 2.3. Air Gap 3. Magnetic Target 4. Output 4.1. Optional
Low Power Pulse-Based Communication
 MERIT BIEN 2009 Final Report 1 Low Power Pulse-Based Communication Santiago Bortman and Paresa Modarres Abstract When designing small, autonomous micro-robotic systems, minimizing power consumption by
MERIT BIEN 2009 Final Report 1 Low Power Pulse-Based Communication Santiago Bortman and Paresa Modarres Abstract When designing small, autonomous micro-robotic systems, minimizing power consumption by
A10-Gb/slow-power adaptive continuous-time linear equalizer using asynchronous under-sampling histogram
 LETTER IEICE Electronics Express, Vol.10, No.4, 1 8 A10-Gb/slow-power adaptive continuous-time linear equalizer using asynchronous under-sampling histogram Wang-Soo Kim and Woo-Young Choi a) Department
LETTER IEICE Electronics Express, Vol.10, No.4, 1 8 A10-Gb/slow-power adaptive continuous-time linear equalizer using asynchronous under-sampling histogram Wang-Soo Kim and Woo-Young Choi a) Department
PROFINET USER S GUIDE ACSI Servo
 PROFINET USER S GUIDE ACSI Servo 3600-4196_06 Tolomatic reserves the right to change the design or operation of the equipment described herein and any associated motion products without notice. Information
PROFINET USER S GUIDE ACSI Servo 3600-4196_06 Tolomatic reserves the right to change the design or operation of the equipment described herein and any associated motion products without notice. Information
Comp551: Advanced Robotics Lab Lecture 7: Consensus CSE481C wi09 - Robotics Capstone, Lec3: Consensus
 Comp551: Advanced Robotics Lab Lecture 7: Consensus 1 intro 3 multi-robot computation model 5 Model: Robot State We can describe the state, s, of a single robot as a tuple of its ID, pose, and private
Comp551: Advanced Robotics Lab Lecture 7: Consensus 1 intro 3 multi-robot computation model 5 Model: Robot State We can describe the state, s, of a single robot as a tuple of its ID, pose, and private
2F. No.25, Industry E. 9 th Rd., Science-Based Industrial Park, Hsinchu, Taiwan Application Note of OGM220, AN001 V1.8
 Application Note of OGM220, AN001 V1.8 1.0 Introduction OGM220 series is a dual channels NDIR module having a digital output directly proportional to CO2 concentration. OGM220 is designed for multi-dropped
Application Note of OGM220, AN001 V1.8 1.0 Introduction OGM220 series is a dual channels NDIR module having a digital output directly proportional to CO2 concentration. OGM220 is designed for multi-dropped
Optimal Clock Synchronization in Networks. Christoph Lenzen Philipp Sommer Roger Wattenhofer
 Optimal Clock Synchronization in Networks Christoph Lenzen Philipp Sommer Roger Wattenhofer Time in Sensor Networks Synchronized clocks are essential for many applications: Sensing TDMA Localization Duty-
Optimal Clock Synchronization in Networks Christoph Lenzen Philipp Sommer Roger Wattenhofer Time in Sensor Networks Synchronized clocks are essential for many applications: Sensing TDMA Localization Duty-
AN ARDUINO CONTROLLED CHAOTIC PENDULUM FOR A REMOTE PHYSICS LABORATORY
 AN ARDUINO CONTROLLED CHAOTIC PENDULUM FOR A REMOTE PHYSICS LABORATORY J. C. Álvarez, J. Lamas, A. J. López, A. Ramil Universidade da Coruña (SPAIN) carlos.alvarez@udc.es, jlamas@udc.es, ana.xesus.lopez@udc.es,
AN ARDUINO CONTROLLED CHAOTIC PENDULUM FOR A REMOTE PHYSICS LABORATORY J. C. Álvarez, J. Lamas, A. J. López, A. Ramil Universidade da Coruña (SPAIN) carlos.alvarez@udc.es, jlamas@udc.es, ana.xesus.lopez@udc.es,
GROUP BEHAVIOR IN MOBILE AUTONOMOUS AGENTS. Bruce Turner Intelligent Machine Design Lab Summer 1999
 GROUP BEHAVIOR IN MOBILE AUTONOMOUS AGENTS Bruce Turner Intelligent Machine Design Lab Summer 1999 1 Introduction: In the natural world, some types of insects live in social communities that seem to be
GROUP BEHAVIOR IN MOBILE AUTONOMOUS AGENTS Bruce Turner Intelligent Machine Design Lab Summer 1999 1 Introduction: In the natural world, some types of insects live in social communities that seem to be
CubeSense. An integrated sun and nadir sensor module. User Manual
 CubeSense An integrated sun and nadir sensor module User Manual Page: 2 Table of Contents List of Acronyms/Abbreviations... 3 1. Introduction... 4 2. Getting Started... 5 2.1 Connection Guide... 5 2.2
CubeSense An integrated sun and nadir sensor module User Manual Page: 2 Table of Contents List of Acronyms/Abbreviations... 3 1. Introduction... 4 2. Getting Started... 5 2.1 Connection Guide... 5 2.2
Unit 6 - Number Games and Crayon Puzzles Unit 8 - Twos, Fives, and Tens Unit 7 - Color, Shape, and Size. Unit 9 - Blocks and Boxes.
 GRADE 1 Pacing 2010-2011 Unit 1 - How Many of Each? Unit 2 - Making Shapes and Designing Quilts Unit 3 - Solving Story Problems Unit 4 - What Would You Rather Be? Unit 5 - Fish Lengths and Animal Jumps
GRADE 1 Pacing 2010-2011 Unit 1 - How Many of Each? Unit 2 - Making Shapes and Designing Quilts Unit 3 - Solving Story Problems Unit 4 - What Would You Rather Be? Unit 5 - Fish Lengths and Animal Jumps
MULTI ROBOT COMMUNICATION AND TARGET TRACKING SYSTEM AND IMPLEMENTATION OF ROBOT USING ARDUINO
 MULTI ROBOT COMMUNICATION AND TARGET TRACKING SYSTEM AND IMPLEMENTATION OF ROBOT USING ARDUINO K. Sindhuja 1, CH. Lavanya 2 1Student, Department of ECE, GIST College, Andhra Pradesh, INDIA 2Assistant Professor,
MULTI ROBOT COMMUNICATION AND TARGET TRACKING SYSTEM AND IMPLEMENTATION OF ROBOT USING ARDUINO K. Sindhuja 1, CH. Lavanya 2 1Student, Department of ECE, GIST College, Andhra Pradesh, INDIA 2Assistant Professor,
Solar-Powered RF Signal Generation for Energy Harvester Applications
 Solar-Powered RF Signal Generation for Energy Harvester Applications Michelle Saltouros and Sam Casey Bradley University ECE Department Advisors: Dr. Brian Huggins and Dr. Prasad Shastry Outline Introduction
Solar-Powered RF Signal Generation for Energy Harvester Applications Michelle Saltouros and Sam Casey Bradley University ECE Department Advisors: Dr. Brian Huggins and Dr. Prasad Shastry Outline Introduction