Real Time Embedded Systems. Lecture 1 January 17, 2012
|
|
|
- Mark Freeman
- 6 years ago
- Views:
Transcription


1 Electric Motors



2 Real Time Embedded Systems Lecture 1 January 17, 2012 Topic

3 Warning! This is a work in progress. Watch out for sharp corners and slippery surfaces
4 Motors CSCI / Real Time Embedded Systems George Washington University Spring stems
5
6 Motors Inductors Inductors make relays, motors, Basic Motor

7 Motors
8 Motor Types Types of motors DC Servo Stepper Others that we are not going to talk about...

9 Inside a DC motor

10 Inside a real DC motor

11 Whats that coil thing?
12 Inductor
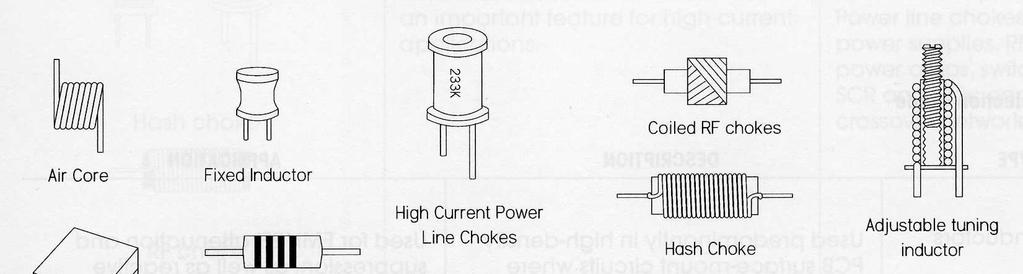
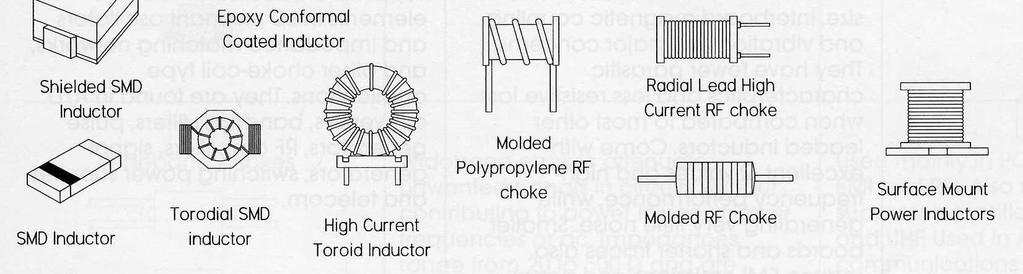
13 Inductors


14 Inductors Make... Electromagnet Relay


15 and... Transformer Solenoid

16 Electro Magnetic Field
17 Input Protection
18 Input Protection
19 Some words/terms Torque Speed Power Torque/Speed curve Power curve
20 Torque F τ = F r r Torque A force to produce a rotation. A twisting force. SI units = N m, English units = inch-pounds, foot-pounds

21 Angular Velocity ω r V tangential = r ω Angular velocity Rate of rotation around an axis. In radians/second or rotations/minute.
22 Power Power Rate at which work is done or energy is emitted/transferred. SI units = Watts (1 watt = 1 N*m/s). English units = Horsepower or footpound/second. P = τ ω
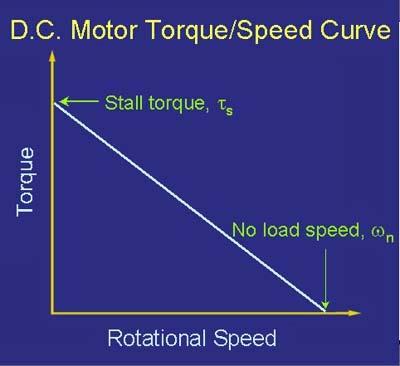
23 Torque/Speed
24 Torque/Speed curve Mostly linear τ motor = τ s - ωt s /ω n ω motor = (τ s t s ) ω n /t s

25 Recall P = τ ω Area of rectangle under curve is power Max Power P max = ½τ s ½ω n Power Curve
26 Power curve We know P = τ ω τ motor = τ s - ωt s /ω n ω motor = (τ s t s ) ω n /t s So P motor (ω) = -(τ s /ω n )ω 2 + τ s ω P motor (τ) = -(ω n /τ s )τ 2 + ω n τ

27 Power Curve
28 Torque Pull-Out Torque - The largest torque under which a motor can operate without sharply losing speed. Pull-In Torque - The largest steady torque with which a motor will attain normal speed after accelerating from a standstill.
29 DC Motors To to control them Use a transistor (for low DC voltages) Power Mosfets How to reverse How to vary speed (PWM) Assorted circuits Transistors H-bridge

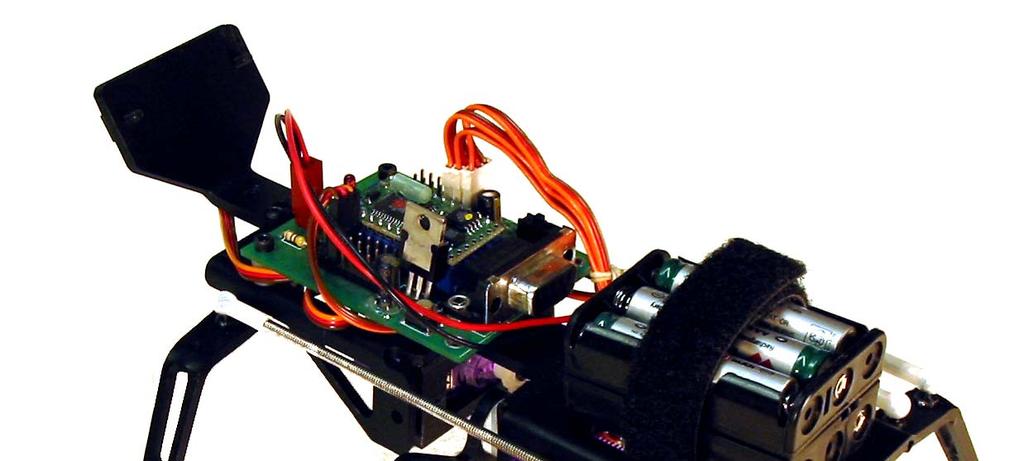
30 Some DC motors

31 DC Motor Speed Contol
32 Simple DC motor driver

33 Power MOSFETs
34 ?

35 Driving Loads

36 DC Motor Speed Control

37 DC Motor Speed Control

38 DC Motor Direction Control
39 DC Motor Direction Control
40 DC Motor Direction Control

41 DC Motor Direction Control

42 DC Motor Speed & Direction

43 DC Motor Speed & Direction
44
45 Servo Motors How they work How to control them 555, uc, servo controller No H-Bridge needed
46
47

48 Servo Motor

49 Servo Control
50 Some ready-made drivers Servo Pololu Others Directly from a z8 Can a java microcontroller control a servo?
51 Stepper Motors Unipolar Bipolar Variable Reluctance Bifilar We consider Unipolar and Bipolar A look inside, how they work

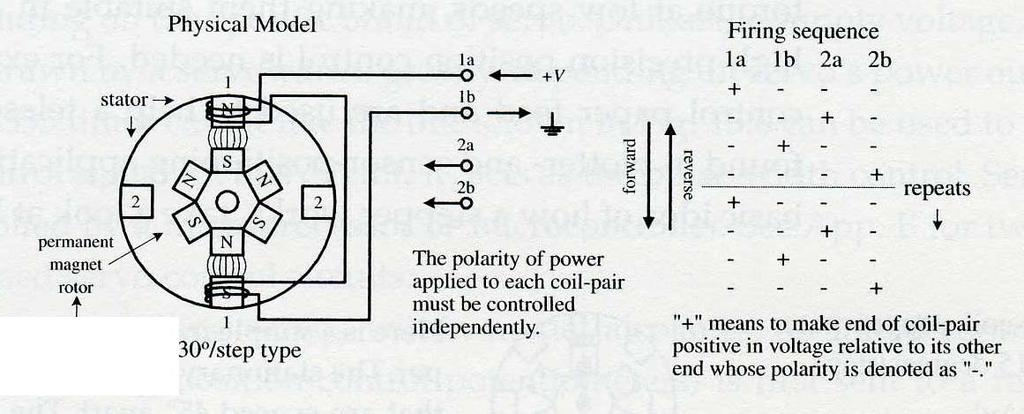
52
53
54

55 Variable Reluctance Motor

56 Variable Reluctance Motor

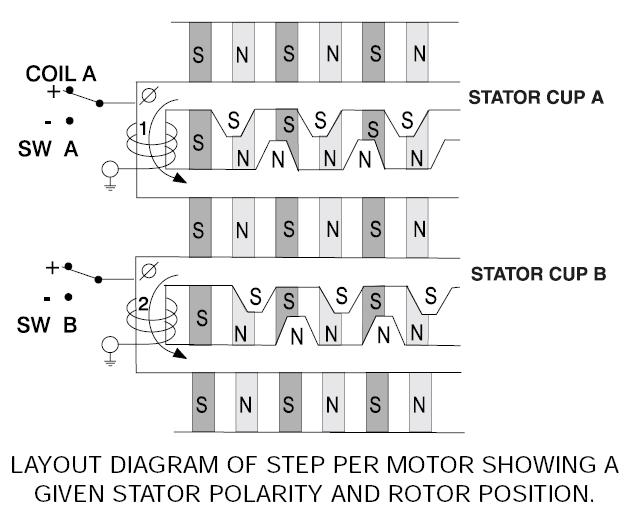
57 Unipolar Stepper Motor
58 Unipolar Stepper Motor
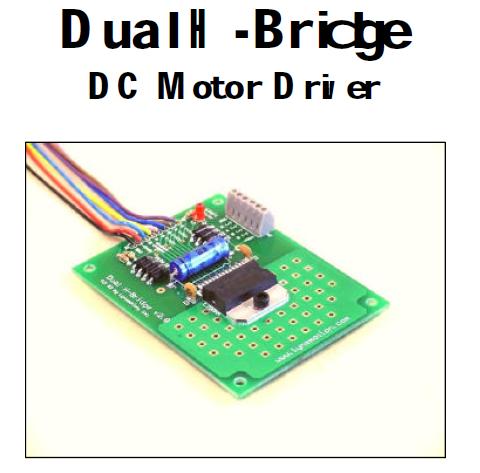
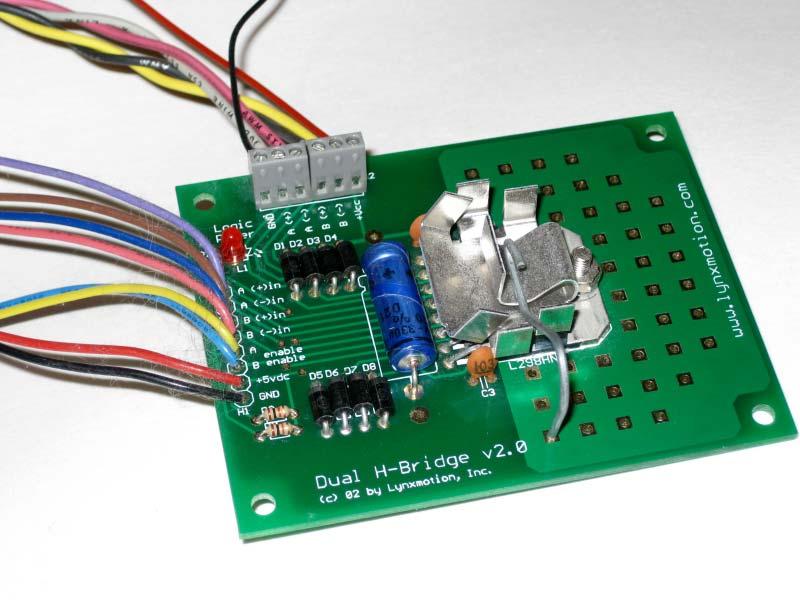
59 Bipolar Stepper Motor

60 Bipolar Stepper Motor

61 Universal Stepper Motor

62 Universal Stepper Motor

63 Stepper Motors

64 Stepper Motor Control
65 How do you drive a stepper motor (what hardware)?
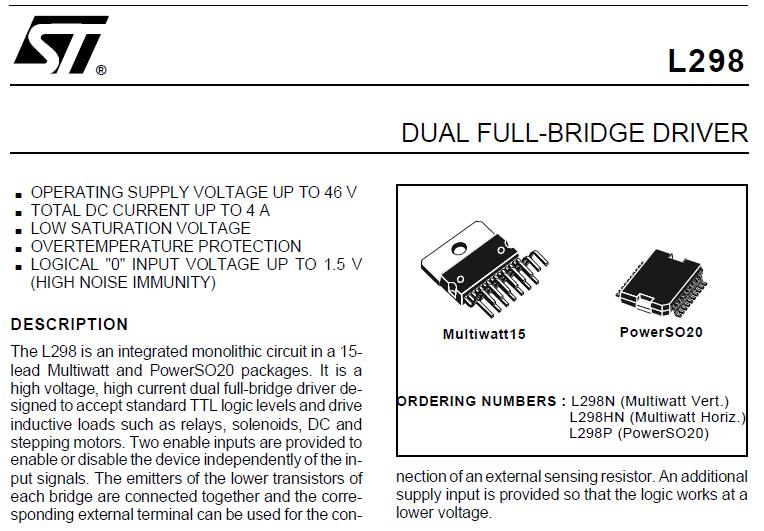
66 Dual H-Bridge
67
68 More on Steppers Setpping Half-stepping Microstepping Friction, Dead zone, Dynamics - holding torque, running torque
69 Unipolar Stepper Motor
70 Still More Control circuits Power transistor Darlington pair H-Bridge (the real answer)
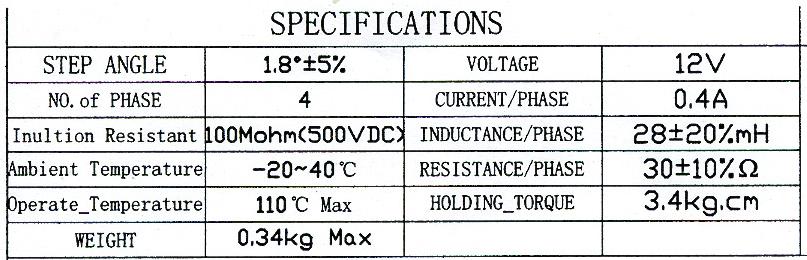
71 Real Motor Spec
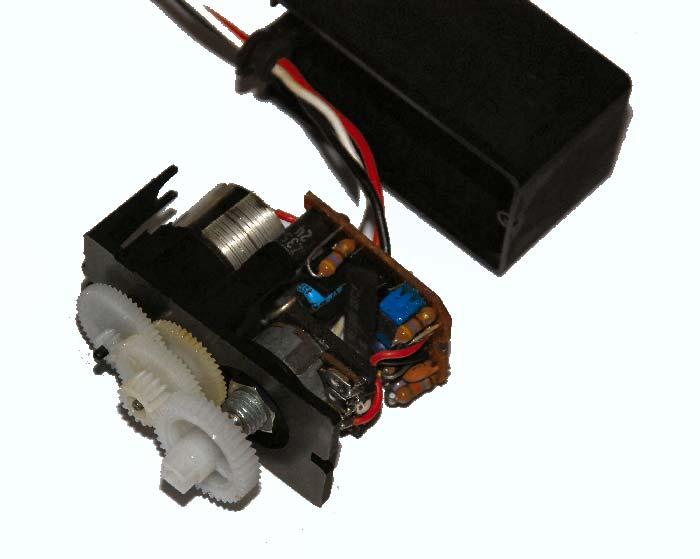
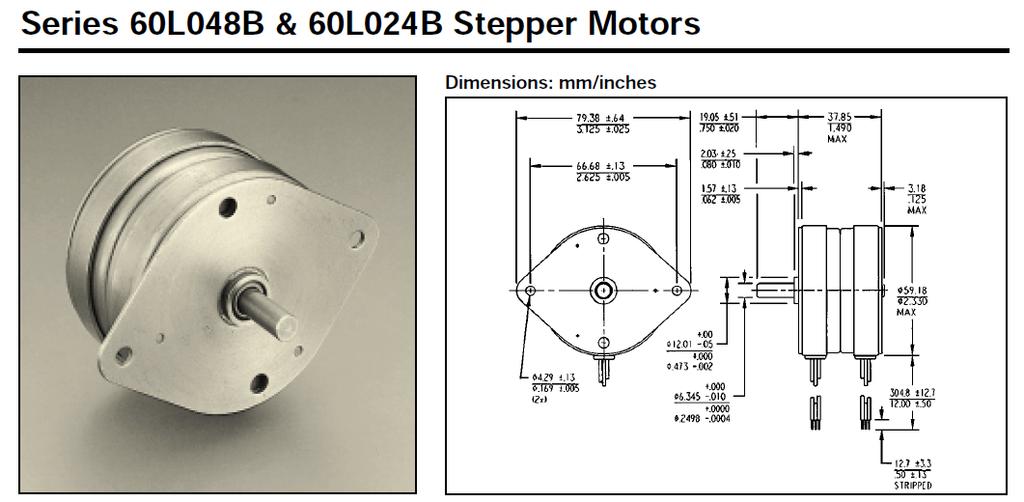
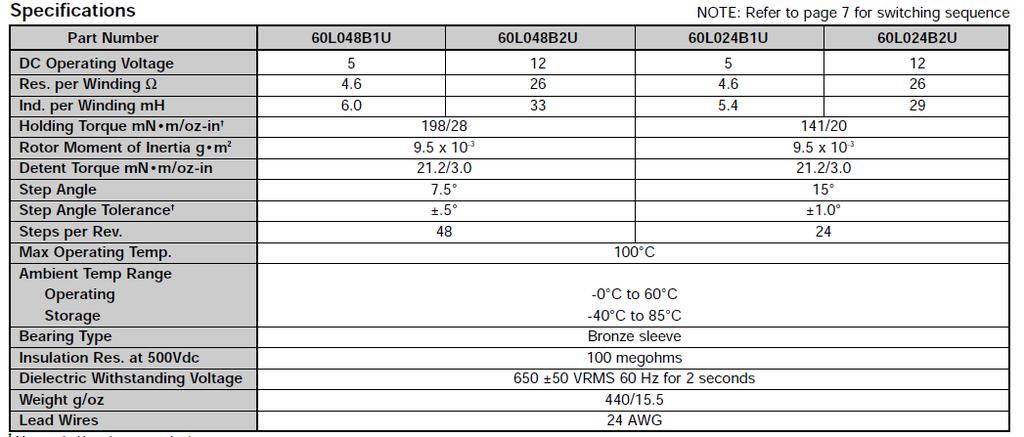
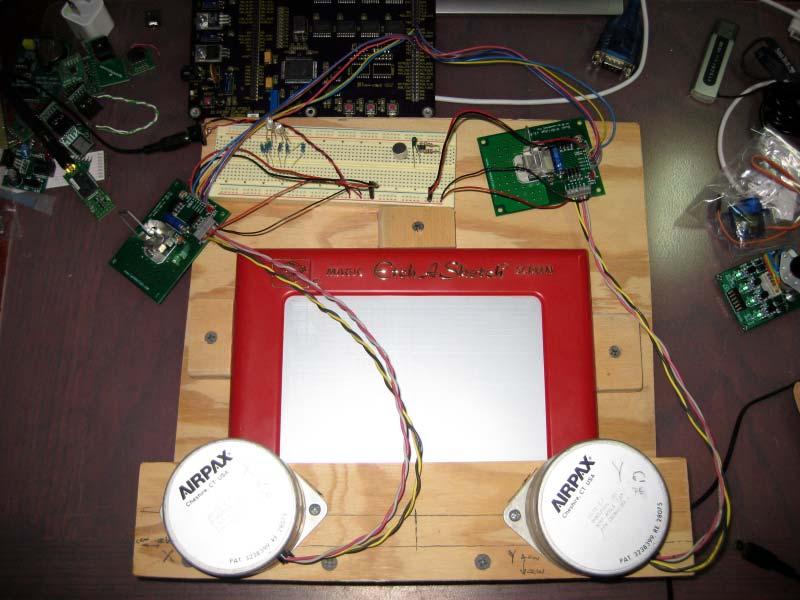
72 Another
73
74
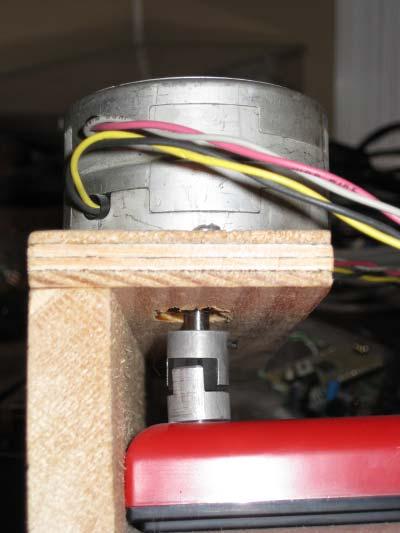
75
76 Some ready-made drivers Stepper Pololu Jameco H-bridges Whats in a stepper driver board and why?

77
78
79 An Example
80

81



82 Motor Coupling
83
84 Special Motors Threaded shaft Linear motors Solenoids Muscle Wire

85 Linear Stepper

86 Threaded Shaft

87 Muscle Wire muscle wire A shape memory alloy (smart metal, memory metal, memory alloy, smart alloy) is an alloy that "remembers" its original, cold-forged shape: returning the pre-deformed shape by heating.


88 Solenoid
89 Measuring Motor Speed or position DC Stepper
90
91 Sensing Motor Position Optical Hall-effect
92
93 Questions?


94 Motor Example Example_ StepperMotor Demonstrate how to control a simple stepper motor
95
96
97 References _Electronics/Stepper_Motors
combine regular DC-motors with a gear-box and an encoder/potentiometer to form a position control loop can only assume a limited range of angular
 Embedded Control Applications II MP10-1 Embedded Control Applications II MP10-2 week lecture topics 10 Embedded Control Applications II - Servo-motor control - Stepper motor control - The control of a
Embedded Control Applications II MP10-1 Embedded Control Applications II MP10-2 week lecture topics 10 Embedded Control Applications II - Servo-motor control - Stepper motor control - The control of a
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control. October 5, 2009 Dr. Harrison H. Chin
 2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
Embedded Systems Lab Lab 7 Stepper Motor Application
 Islamic University of Gaza College of Engineering puter Department Embedded Systems Lab Stepper Motor Application Prepared By: Eng.Ola M. Abd El-Latif Apr. /2010 :D 0 Objective Tools Theory To realize
Islamic University of Gaza College of Engineering puter Department Embedded Systems Lab Stepper Motor Application Prepared By: Eng.Ola M. Abd El-Latif Apr. /2010 :D 0 Objective Tools Theory To realize
M.Kaliamoorthy and I.Gerald PSNACET/EEE CHAPTER 2 STEPPER MOTORS
 2.1.General Lecture Notes M.Kaliamoorthy and I.Gerald PSNACET/EEE CHAPTER 2 STEPPER MOTORS Stepper motors are electromagnetic incremental devices that convert electric pulses to shaft motion (rotation).
2.1.General Lecture Notes M.Kaliamoorthy and I.Gerald PSNACET/EEE CHAPTER 2 STEPPER MOTORS Stepper motors are electromagnetic incremental devices that convert electric pulses to shaft motion (rotation).
Administrative Notes. DC Motors; Torque and Gearing; Encoders; Motor Control. Today. Early DC Motors. Friday 1pm: Communications lecture
 At Actuation: ti DC Motors; Torque and Gearing; Encoders; Motor Control RSS Lecture 3 Wednesday, 11 Feb 2009 Prof. Seth Teller Administrative Notes Friday 1pm: Communications lecture Discuss: writing up
At Actuation: ti DC Motors; Torque and Gearing; Encoders; Motor Control RSS Lecture 3 Wednesday, 11 Feb 2009 Prof. Seth Teller Administrative Notes Friday 1pm: Communications lecture Discuss: writing up
Actuators. EECS461, Lecture 5, updated September 16,
 Actuators The other side of the coin from sensors... Enable a microprocessor to modify the analog world. Examples: - speakers that transform an electrical signal into acoustic energy (sound) - remote control
Actuators The other side of the coin from sensors... Enable a microprocessor to modify the analog world. Examples: - speakers that transform an electrical signal into acoustic energy (sound) - remote control
L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G
 P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
P R O F. S L A C K L E C T U R E R, E L E C T R I C A L A N D M I C R O E L E C T R O N I C E N G I N E E R I N G G B S E E E @ R I T. E D U B L D I N G 9, O F F I C E 0 9-3 1 8 9 ( 5 8 5 ) 4 7 5-5 1 0
Introduction to Relays. ECE/CS 5780/6780: Embedded System Design. Various Relay Configurations. Types of Relays. Drawing of an EM Relay
 Introduction to Relays ECE/CS 5780/6780: Embedded System Design Chris J. Myers Lecture 15: Relays and Motors A relay is a device that responds to a small current or voltage change by activating a switches
Introduction to Relays ECE/CS 5780/6780: Embedded System Design Chris J. Myers Lecture 15: Relays and Motors A relay is a device that responds to a small current or voltage change by activating a switches
Stepper Motors in C. Unipolar (5 lead) stepper motorr. $1.95 from 100 steps per rotation. 24V / 160mA / 600 gm cm holding 160mA
 stepper motorr. $1.95 from 100 steps per rotation. 24V / 160mA / 600 gm cm holding 160mA") U tepper Motors ugust 22, 2017 tepper Motors in Unipolar (5 lead) stepper motorr. $1.95 from www.mpja.com 100 steps per rotation. 24V / 160m / 600 gm cm holding torque @ 160m stepper motor is a digital
U tepper Motors ugust 22, 2017 tepper Motors in Unipolar (5 lead) stepper motorr. $1.95 from www.mpja.com 100 steps per rotation. 24V / 160m / 600 gm cm holding torque @ 160m stepper motor is a digital
MOSFET as a Switch. MOSFET Characteristics Curves
 MOSFET as a Switch MOSFET s make very good electronic switches for controlling loads and in CMOS digital circuits as they operate between their cut-off and saturation regions. We saw previously, that the
MOSFET as a Switch MOSFET s make very good electronic switches for controlling loads and in CMOS digital circuits as they operate between their cut-off and saturation regions. We saw previously, that the
Actuators in Automatic Control System
 Actuators in Automatic Control System Measurement & Control Systems Transducers Measurement Process Actuators Data processing Requirement analyses Decision making Control actions CONTROL action requires
Actuators in Automatic Control System Measurement & Control Systems Transducers Measurement Process Actuators Data processing Requirement analyses Decision making Control actions CONTROL action requires
Page 1. Relays. Poles and Throws. Relay Types. Common embedded system problem CS/ECE 6780/5780. Al Davis. Terminology used for switches
 Relays CS/ECE 6780/5780 Al Davis Today s topics: Relays & Motors prelude to 5780 Lab 9 Common embedded system problem digital control: relatively small I & V levels controlled device requires significantly
Relays CS/ECE 6780/5780 Al Davis Today s topics: Relays & Motors prelude to 5780 Lab 9 Common embedded system problem digital control: relatively small I & V levels controlled device requires significantly
Brushed DC Motor PWM Speed Control with the NI myrio, Optical Encoder, and H-Bridge
 Brushed DC Motor PWM Speed Control with the NI myrio, Optical Encoder, and H-Bridge Motor Controller Brushed DC Motor / Encoder System K. Craig 1 Gnd 5 V OR Gate H-Bridge 12 V Bypass Capacitors Flyback
Brushed DC Motor PWM Speed Control with the NI myrio, Optical Encoder, and H-Bridge Motor Controller Brushed DC Motor / Encoder System K. Craig 1 Gnd 5 V OR Gate H-Bridge 12 V Bypass Capacitors Flyback
Motion Control Glossary
 This section contains a description of many of the terms used in the design and application of motion control products and programmable devices. Although other reference books and definitions exist, these
This section contains a description of many of the terms used in the design and application of motion control products and programmable devices. Although other reference books and definitions exist, these
Assembly Language. Topic 14 Motion Control. Stepper and Servo Motors
 Assembly Language Topic 14 Motion Control Stepper and Servo Motors Objectives To gain an understanding of the operation of a stepper motor To develop a means to control a stepper motor To gain an understanding
Assembly Language Topic 14 Motion Control Stepper and Servo Motors Objectives To gain an understanding of the operation of a stepper motor To develop a means to control a stepper motor To gain an understanding
EEE3410 Microcontroller Applications Department of Electrical Engineering Lecture 11 Motor Control
 EEE34 Microcontroller Applications Department of Electrical Engineering Lecture Motor Control Week 3 EEE34 Microcontroller Applications In this Lecture. Interface 85 with the following output Devices Optoisolator
EEE34 Microcontroller Applications Department of Electrical Engineering Lecture Motor Control Week 3 EEE34 Microcontroller Applications In this Lecture. Interface 85 with the following output Devices Optoisolator
Lock Cracker S. Lust, E. Skjel, R. LeBlanc, C. Kim
 Lock Cracker S. Lust, E. Skjel, R. LeBlanc, C. Kim Abstract - This project utilized Eleven Engineering s XInC2 development board to control several peripheral devices to open a standard 40 digit combination
Lock Cracker S. Lust, E. Skjel, R. LeBlanc, C. Kim Abstract - This project utilized Eleven Engineering s XInC2 development board to control several peripheral devices to open a standard 40 digit combination
Robot Actuators. Motors and Control. Stepper Motor Basics. Increased Resolution. Stepper motors. DC motors AC motors. Physics review: Nature is lazy.
 obot Actuators tepper motors Motors and Control DC motors AC motors Physics review: ature is lazy. Things seek lowest energy states. iron core vs. magnet magnetic fields tend to line up Electric fields
obot Actuators tepper motors Motors and Control DC motors AC motors Physics review: ature is lazy. Things seek lowest energy states. iron core vs. magnet magnetic fields tend to line up Electric fields
EXPERIMENT 6: Advanced I/O Programming
 EXPERIMENT 6: Advanced I/O Programming Objectives: To familiarize students with DC Motor control and Stepper Motor Interfacing. To utilize MikroC and MPLAB for Input Output Interfacing and motor control.
EXPERIMENT 6: Advanced I/O Programming Objectives: To familiarize students with DC Motor control and Stepper Motor Interfacing. To utilize MikroC and MPLAB for Input Output Interfacing and motor control.
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
Where: (J LM ) is the load inertia referred to the motor shaft. 8.0 CONSIDERATIONS FOR THE CONTROL OF DC MICROMOTORS. 8.
 is the load inertia referred to the motor shaft. 8.0 CONSIDERATIONS FOR THE CONTROL OF DC MICROMOTORS. 8.") Where: (J LM ) is the load inertia referred to the motor shaft. 8.0 CONSIDERATIONS FOR THE CONTROL OF DC MICROMOTORS 8.1 General Comments Due to its inherent qualities the Escap micromotor is very suitable
Where: (J LM ) is the load inertia referred to the motor shaft. 8.0 CONSIDERATIONS FOR THE CONTROL OF DC MICROMOTORS 8.1 General Comments Due to its inherent qualities the Escap micromotor is very suitable
Step vs. Servo Selecting the Best
 Step vs. Servo Selecting the Best Dan Jones Over the many years, there have been many technical papers and articles about which motor is the best. The short and sweet answer is let s talk about the application.
Step vs. Servo Selecting the Best Dan Jones Over the many years, there have been many technical papers and articles about which motor is the best. The short and sweet answer is let s talk about the application.
PHASE BRUSHLESS DC MOTOR CONTROLLER/DRIVER FEATURES
 Data Sheet 29318.20B 2936-120 Combining logic and power, the UDN2936W-120 provides commutation and drive for three-phase brushless dc motors. Each of the three outputs are rated at 45 V and ±2 A (±3 A
Data Sheet 29318.20B 2936-120 Combining logic and power, the UDN2936W-120 provides commutation and drive for three-phase brushless dc motors. Each of the three outputs are rated at 45 V and ±2 A (±3 A
School of Engineering Mechatronics Engineering Department. Experim. ment no. 1
 University of Jordan School of Engineering Mechatronics Engineering Department 2010 Mechatronics System Design Lab Experim ment no. 1 PRINCIPLES OF SWITCHING Copyrights' are held by : Eng. Ala' Bata &
University of Jordan School of Engineering Mechatronics Engineering Department 2010 Mechatronics System Design Lab Experim ment no. 1 PRINCIPLES OF SWITCHING Copyrights' are held by : Eng. Ala' Bata &
CMSC838. Tangible Interactive Assistant Professor Computer Science. Week 11 Lecture 20 April 9, 2015 Motors
 CMSC838 Tangible Interactive Computing Week 11 Lecture 20 April 9, 2015 Motors Human Computer Interaction Laboratory @jonfroehlich Assistant Professor Computer Science TODAY S LEARNING GOALS 1. Learn about
CMSC838 Tangible Interactive Computing Week 11 Lecture 20 April 9, 2015 Motors Human Computer Interaction Laboratory @jonfroehlich Assistant Professor Computer Science TODAY S LEARNING GOALS 1. Learn about
o What happens if S1 and S2 or S3 and S4 are closed simultaneously? o Perform Motor Control, H-Bridges LAB 2 H-Bridges with SPST Switches
 Cornerstone Electronics Technology and Robotics II H-Bridges and Electronic Motor Control 4 Hour Class Administration: o Prayer o Debriefing Botball competition Four States of a DC Motor with Terminals
Cornerstone Electronics Technology and Robotics II H-Bridges and Electronic Motor Control 4 Hour Class Administration: o Prayer o Debriefing Botball competition Four States of a DC Motor with Terminals
Brushed DC Motor System
 Brushed DC Motor System Pittman DC Servo Motor Schematic Brushed DC Motor Brushed DC Motor System K. Craig 1 Topics Brushed DC Motor Physical & Mathematical Modeling Hardware Parameters Model Hardware
Brushed DC Motor System Pittman DC Servo Motor Schematic Brushed DC Motor Brushed DC Motor System K. Craig 1 Topics Brushed DC Motor Physical & Mathematical Modeling Hardware Parameters Model Hardware
Brushed DC Motor Microcontroller PWM Speed Control with Optical Encoder and H-Bridge
 Brushed DC Motor Microcontroller PWM Speed Control with Optical Encoder and H-Bridge L298 Full H-Bridge HEF4071B OR Gate Brushed DC Motor with Optical Encoder & Load Inertia Flyback Diodes Arduino Microcontroller
Brushed DC Motor Microcontroller PWM Speed Control with Optical Encoder and H-Bridge L298 Full H-Bridge HEF4071B OR Gate Brushed DC Motor with Optical Encoder & Load Inertia Flyback Diodes Arduino Microcontroller
Stepping Motor Physics
 Stepping Motor Physics Part of Stepping Motors by Douglas W. Jones THE UNIVERSITY OF IOWA Department of Computer Science Introduction Statics - Half-Stepping and Microstepping - Friction and the Dead Zone
Stepping Motor Physics Part of Stepping Motors by Douglas W. Jones THE UNIVERSITY OF IOWA Department of Computer Science Introduction Statics - Half-Stepping and Microstepping - Friction and the Dead Zone
Micromouse Meeting #3 Lecture #2. Power Motors Encoders
 Micromouse Meeting #3 Lecture #2 Power Motors Encoders Previous Stuff Microcontroller pick one yet? Meet your team Some teams were changed High Level Diagram Power Everything needs power Batteries Supply
Micromouse Meeting #3 Lecture #2 Power Motors Encoders Previous Stuff Microcontroller pick one yet? Meet your team Some teams were changed High Level Diagram Power Everything needs power Batteries Supply
Actuators. DC Motor Servo Motor Stepper Motor. Sensors
 Actuators Sensors 2 Actuators DC Motor Servo Motor Stepper Motor Sensors 3 1. The stator generates a stationary magnetic field surrounding the rotor. 2. The rotor/armature is composed of a coil which generates
Actuators Sensors 2 Actuators DC Motor Servo Motor Stepper Motor Sensors 3 1. The stator generates a stationary magnetic field surrounding the rotor. 2. The rotor/armature is composed of a coil which generates
Simulation of Stepper Motor using Quasi Square Wave Input
 Simulation of Stepper Motor using Quasi Square Wave Input Kavya Sree Chandran P G Scholar Electrical &Electronics Dept. Mar Baselios College of Engineering, Thiruvananthapuram,Kerala, India Abstract Stepper
Simulation of Stepper Motor using Quasi Square Wave Input Kavya Sree Chandran P G Scholar Electrical &Electronics Dept. Mar Baselios College of Engineering, Thiruvananthapuram,Kerala, India Abstract Stepper
REQUIRED SKILLS AND KNOWLEDGE UEENEEG101A. Electromagnetic devices and circuits. Topic and Description NIDA Lesson CARD # Magnetism encompassing:
 REQUIRED SKILLS AND KNOWLEDGE UEENEEG101A KS01-EG101A Electromagnetic devices and circuits T1 Magnetism encompassing: Topic and Description NIDA Lesson CARD # magnetic field pattern of bar and horse-shoe
REQUIRED SKILLS AND KNOWLEDGE UEENEEG101A KS01-EG101A Electromagnetic devices and circuits T1 Magnetism encompassing: Topic and Description NIDA Lesson CARD # magnetic field pattern of bar and horse-shoe
DISCONTINUED PRODUCT FOR REFERENCE ONLY. See A3967 or A3977 for new design. BiMOS II UNIPOLAR STEPPER-MOTOR TRANSLATOR/DRIVER FEATURES
 Data Sheet 2684.2C* OUTPUT B K BD OUTPUT D GROUND GROUND OUTPUT C K AC OUTPUTA 2 3 4 5 6 7 8 LOGIC V DD OE 6 5 4 3 2 0 9 SUPPLY OUTPUT ENABLE DIRECTION GROUND GROUND STEP INPUT HALF-STEP ONE-PHASE Dwg.
Data Sheet 2684.2C* OUTPUT B K BD OUTPUT D GROUND GROUND OUTPUT C K AC OUTPUTA 2 3 4 5 6 7 8 LOGIC V DD OE 6 5 4 3 2 0 9 SUPPLY OUTPUT ENABLE DIRECTION GROUND GROUND STEP INPUT HALF-STEP ONE-PHASE Dwg.
Semiconductor 9/21/2015
 Semiconductor Electronics 9/21/2015 Starting simple the diode. The diode is one of the simplest semiconductor devices. It is comprised of two layers of semiconductor. One is impregnated with an electron
Semiconductor Electronics 9/21/2015 Starting simple the diode. The diode is one of the simplest semiconductor devices. It is comprised of two layers of semiconductor. One is impregnated with an electron
ECET 211 Electric Machines & Controls Lecture 9-1 Adjustable-Speed Drives and PLC Installations (1 of 2)
") ECET 211 Electric Machines & Controls Lecture 9-1 Adjustable-Speed Drives (1 of 2) Text Book: Electric Motors and Control Systems, by Frank D. Petruzella, published by McGraw Hill, 2015. Paul I-Hai Lin,
ECET 211 Electric Machines & Controls Lecture 9-1 Adjustable-Speed Drives (1 of 2) Text Book: Electric Motors and Control Systems, by Frank D. Petruzella, published by McGraw Hill, 2015. Paul I-Hai Lin,
ECE 445 Spring 2017 Autonomous Trash Can. Group #85: Eshwar Cheekati, Michael Gao, Aditya Sule
 ECE 445 Spring 27 Autonomous Trash Can Group #85: Eshwar Cheekati, Michael Gao, Aditya Sule Introduction High amount of waste generated Poor communication/trash management -> smelly odors Need for reminder
ECE 445 Spring 27 Autonomous Trash Can Group #85: Eshwar Cheekati, Michael Gao, Aditya Sule Introduction High amount of waste generated Poor communication/trash management -> smelly odors Need for reminder
DM8010 tm. Hardware Reference Manual. Document Revision B3 May 16, 2018
 tm Hardware Reference Manual Document Revision B3 May 16, 2018 MICROKINETICS CORPORATION 3380 Town Point Drive Suite 330 Kennesaw, Georgia 30144 Tel: (770) 422-7845 Fax: (770) 422-7854 Table Of Contents
tm Hardware Reference Manual Document Revision B3 May 16, 2018 MICROKINETICS CORPORATION 3380 Town Point Drive Suite 330 Kennesaw, Georgia 30144 Tel: (770) 422-7845 Fax: (770) 422-7854 Table Of Contents
STEPPER MOTORS. Intro to Stepper Motors
 STEPPER MOTORS Intro to Stepper Motors DC motors with precise control of how far they spin They have a fixed number of steps the take to turn one full revolution You can control them one step at a time
STEPPER MOTORS Intro to Stepper Motors DC motors with precise control of how far they spin They have a fixed number of steps the take to turn one full revolution You can control them one step at a time
DE1.3 Electronics 1. Tips on Team Projects
 DE1.3 Electronics 1 Tips on Team Projects To help you progress with the team project, I have prepared this documents to provide extra instructions that you should find helpful. 1. How can I drive TWO motors
DE1.3 Electronics 1 Tips on Team Projects To help you progress with the team project, I have prepared this documents to provide extra instructions that you should find helpful. 1. How can I drive TWO motors
USER S GUIDE POLOLU A4988 STEPPER MOTOR DRIVER CARRIER USING THE DRIVER POWER CONNECTIONS
 POLOLU A4988 STEPPER MOTOR DRIVER CARRIER USER S GUIDE USING THE DRIVER Minimal wiring diagram for connecting a microcontroller to an A4988 stepper motor driver carrier (full-step mode). POWER CONNECTIONS
POLOLU A4988 STEPPER MOTOR DRIVER CARRIER USER S GUIDE USING THE DRIVER Minimal wiring diagram for connecting a microcontroller to an A4988 stepper motor driver carrier (full-step mode). POWER CONNECTIONS
ServoStep technology
 What means "ServoStep" "ServoStep" in Ever Elettronica's strategy resumes seven keypoints for quality and performances in motion control applications: Stepping motors Fast Forward Feed Full Digital Drive
What means "ServoStep" "ServoStep" in Ever Elettronica's strategy resumes seven keypoints for quality and performances in motion control applications: Stepping motors Fast Forward Feed Full Digital Drive
Modelling and Control of Hybrid Stepper Motor
 I J C T A, 9(37) 2016, pp. 741-749 International Science Press Modelling and Control of Hybrid Stepper Motor S.S. Harish *, K. Barkavi **, C.S. Boopathi *** and K. Selvakumar **** Abstract: This paper
I J C T A, 9(37) 2016, pp. 741-749 International Science Press Modelling and Control of Hybrid Stepper Motor S.S. Harish *, K. Barkavi **, C.S. Boopathi *** and K. Selvakumar **** Abstract: This paper
STUDY ON MODELLING AND SIMULATION OF PERMANENT MAGNET STEPPING MOTOR BY MATLAB/SIMULINK
 Scientific Bulletin of the Petru Maior University of Tîrgu Mureş Vol. 11 (XXVIII) no. 2, 2014 ISSN-L 1841-9267 (Print), ISSN 2285-438X (Online), ISSN 2286-3184 (CD-ROM) STUDY ON MODELLING AND SIMULATION
Scientific Bulletin of the Petru Maior University of Tîrgu Mureş Vol. 11 (XXVIII) no. 2, 2014 ISSN-L 1841-9267 (Print), ISSN 2285-438X (Online), ISSN 2286-3184 (CD-ROM) STUDY ON MODELLING AND SIMULATION
CIS009-2, Mechatronics Signals & Motors
 CIS009-2, Signals & Motors Bedfordshire 13 th December 2012 Outline 1 2 3 4 5 6 7 8 3 Signals Two types of signals exist: 4 Bedfordshire 52 Analogue signal In an analogue signal voltages and currents continuously
CIS009-2, Signals & Motors Bedfordshire 13 th December 2012 Outline 1 2 3 4 5 6 7 8 3 Signals Two types of signals exist: 4 Bedfordshire 52 Analogue signal In an analogue signal voltages and currents continuously
Upgrading from Stepper to Servo
 Upgrading from Stepper to Servo Switching to Servos Provides Benefits, Here s How to Reduce the Cost and Challenges Byline: Scott Carlberg, Motion Product Marketing Manager, Yaskawa America, Inc. The customers
Upgrading from Stepper to Servo Switching to Servos Provides Benefits, Here s How to Reduce the Cost and Challenges Byline: Scott Carlberg, Motion Product Marketing Manager, Yaskawa America, Inc. The customers
E11 Lecture 11: Sensors & Actuators. Profs. David Money Harris & Sarah Harris Fall 2011
 E11 Lecture 11: Sensors & Actuators Profs. David Money Harris & Sarah Harris Fall 2011 Outline Actuators DC Motor Servo Motor Stepper Motor Sensors Phototransistor Reflectance Sensor IR Distance Sensor
E11 Lecture 11: Sensors & Actuators Profs. David Money Harris & Sarah Harris Fall 2011 Outline Actuators DC Motor Servo Motor Stepper Motor Sensors Phototransistor Reflectance Sensor IR Distance Sensor
DM9082 Closed Loop Stepping System
 DM9082 Closed Loop Stepping System 1. Introduction Descriptions DM9082 is a new generation hybrid servo driver, it uses the 32-bit DSP processor, the internal integrates the technology of the anti-resonance,
DM9082 Closed Loop Stepping System 1. Introduction Descriptions DM9082 is a new generation hybrid servo driver, it uses the 32-bit DSP processor, the internal integrates the technology of the anti-resonance,
INTEGRATED CIRCUITS. AN1221 Switched-mode drives for DC motors. Author: Lester J. Hadley, Jr.
 INTEGRATED CIRCUITS Author: Lester J. Hadley, Jr. 1988 Dec Author: Lester J. Hadley, Jr. ABSTRACT The purpose of this paper is to demonstrate the use of integrated switched-mode controllers, generally
INTEGRATED CIRCUITS Author: Lester J. Hadley, Jr. 1988 Dec Author: Lester J. Hadley, Jr. ABSTRACT The purpose of this paper is to demonstrate the use of integrated switched-mode controllers, generally
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
3U High, 19" Drive Rack
 3U High, 19" Drive Rack 3U plug-in amplifiers Dedicated control card for each amplifier 19 inch rack-mount design Flexible design provides the ability to drive brush, brushless, or stepper motors with
3U High, 19" Drive Rack 3U plug-in amplifiers Dedicated control card for each amplifier 19 inch rack-mount design Flexible design provides the ability to drive brush, brushless, or stepper motors with
MICROCONTROLLERS Stepper motor control with Sequential Logic Circuits
 PH-315 MICROCONTROLLERS Stepper motor control with Sequential Logic Circuits Portland State University Summary Four sequential digital waveforms are used to control a stepper motor. The main objective
PH-315 MICROCONTROLLERS Stepper motor control with Sequential Logic Circuits Portland State University Summary Four sequential digital waveforms are used to control a stepper motor. The main objective
THE UNIVERSITY OF BRITISH COLUMBIA. Department of Electrical and Computer Engineering. EECE 365: Applied Electronics and Electromechanics
 THE UNIVERSITY OF BRITISH COLUMBIA Department of Electrical and Computer Engineering EECE 365: Applied Electronics and Electromechanics Final Exam / Sample-Practice Exam Spring 2008 April 23 Topics Covered:
THE UNIVERSITY OF BRITISH COLUMBIA Department of Electrical and Computer Engineering EECE 365: Applied Electronics and Electromechanics Final Exam / Sample-Practice Exam Spring 2008 April 23 Topics Covered:
LECTURE NOTES ON ELECTRICAL MACHINE-II. Subject Code-PCEL4302
 LECTURE NOTES ON ELECTRICAL MACHINE-II Subject Code-PCEL4302 For B.Tech 5 th Semester Electrical Engineering MODULE-III SYNERGY INSTITUTE OF ENGINEERING AND TECHNOLOGY Department of Electrical Engineering
LECTURE NOTES ON ELECTRICAL MACHINE-II Subject Code-PCEL4302 For B.Tech 5 th Semester Electrical Engineering MODULE-III SYNERGY INSTITUTE OF ENGINEERING AND TECHNOLOGY Department of Electrical Engineering
PKG-171-MBC25-PS-CBL System Diagram and Specifications
 PKG-171-MBC25-PS-CBL System Diagram and Specifications Included Components: 17Y102S-LW4-MS Stepper Motor MBC25081TB Stepper Driver PSAM24V2.7A Power Supply CBL-20AWG-04C-010-MS Motor Cable CBL-AA4366 Power
PKG-171-MBC25-PS-CBL System Diagram and Specifications Included Components: 17Y102S-LW4-MS Stepper Motor MBC25081TB Stepper Driver PSAM24V2.7A Power Supply CBL-20AWG-04C-010-MS Motor Cable CBL-AA4366 Power
Experiment (2) DC Motor Control (Direction and Speed)
 DC Motor Control (Direction and Speed)") Introduction Experiment (2) DC Motor Control (Direction and Speed) Controlling direction and speed of DC motor is very essential in many applications like: 1- Robotic application to change direction and
Introduction Experiment (2) DC Motor Control (Direction and Speed) Controlling direction and speed of DC motor is very essential in many applications like: 1- Robotic application to change direction and
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Size 23 Double Stack External Linear Size 23 Double Stack. 57M4 n n n n n n. 57L4 n n n n n n. E57M4 n n n n n n. Bipolar 5 VDC 12 VDC 2.
 HAYD: 0 756 7 57000 Series: Double Stack Stepper Motor Linear Actuator Haydon 57000 Series Double Stack hybrid linear actuators deliver greater performance in a compact size. The various patented designs
HAYD: 0 756 7 57000 Series: Double Stack Stepper Motor Linear Actuator Haydon 57000 Series Double Stack hybrid linear actuators deliver greater performance in a compact size. The various patented designs
CHAPTER TWO LITERATURE REVIEW
 CHAPTER TWO LITERATURE REVIEW 2.1 Technical Background: 2.1.1 Overview of Satellites: Satellites are objects in orbits about the Earth. An orbit is a trajectory able to maintain gravitational equilibrium
CHAPTER TWO LITERATURE REVIEW 2.1 Technical Background: 2.1.1 Overview of Satellites: Satellites are objects in orbits about the Earth. An orbit is a trajectory able to maintain gravitational equilibrium
Si3540 Programmable Step Motor Drive
 44 Westridge Dr. Watsonville, CA 9576 831/761-6555 8/525-169 FAX 831/761-6544 Si354 Programmable Step Motor Drive 38 Si354 Programmable Step Motor Drive Features Si, Si Command anguage (SC) or SiNet Hub
44 Westridge Dr. Watsonville, CA 9576 831/761-6555 8/525-169 FAX 831/761-6544 Si354 Programmable Step Motor Drive 38 Si354 Programmable Step Motor Drive Features Si, Si Command anguage (SC) or SiNet Hub
87000 Series Size 34 Hybrid Linear Actuators
 87000 Series Single Stack Stepper Motor Linear Actuators 87000 Series Hybrid Linear Actuators Our largest, most powerful linear actuator incorporates the same precision, high performance and durable patented
87000 Series Single Stack Stepper Motor Linear Actuators 87000 Series Hybrid Linear Actuators Our largest, most powerful linear actuator incorporates the same precision, high performance and durable patented
Design and Implementation of a Microcontroller Based Buck Boost Converter as a Smooth Starter for Permanent Magnet Motor
 Indonesian Journal of Electrical Engineering and Computer Science Vol. 1, No. 3, March 2016, pp. 566 ~ 574 DOI: 10.11591/ijeecs.v1.i3.pp566-574 566 Design and Implementation of a Microcontroller Based
Indonesian Journal of Electrical Engineering and Computer Science Vol. 1, No. 3, March 2016, pp. 566 ~ 574 DOI: 10.11591/ijeecs.v1.i3.pp566-574 566 Design and Implementation of a Microcontroller Based
OPTICS IN MOTION. Introduction: Competing Technologies: 1 of 6 3/18/2012 6:27 PM.
 1 of 6 3/18/2012 6:27 PM OPTICS IN MOTION STANDARD AND CUSTOM FAST STEERING MIRRORS Home Products Contact Tutorial Navigate Our Site 1) Laser Beam Stabilization to design and build a custom 3.5 x 5 inch,
1 of 6 3/18/2012 6:27 PM OPTICS IN MOTION STANDARD AND CUSTOM FAST STEERING MIRRORS Home Products Contact Tutorial Navigate Our Site 1) Laser Beam Stabilization to design and build a custom 3.5 x 5 inch,
Embedded systems. Exercise session 2. Important Circuit Components Circuit Design
 Embedded systems Exercise session 2 Important Circuit Components Circuit Design Communications Contact Mail : michael.fonder@ulg.ac.be Website for the exercise sessions and the project : http://www.montefiore.ulg.ac.be/~mfonder/info0064/
Embedded systems Exercise session 2 Important Circuit Components Circuit Design Communications Contact Mail : michael.fonder@ulg.ac.be Website for the exercise sessions and the project : http://www.montefiore.ulg.ac.be/~mfonder/info0064/
Stepper Motor Driver CW8060
 Stepper Motor Driver CW8060 CW8060 1. Introduction Descriptions The CW8060 driver is a cost-effective and high performance stepping driver. The design is based on an advanced control technology. It applies
Stepper Motor Driver CW8060 CW8060 1. Introduction Descriptions The CW8060 driver is a cost-effective and high performance stepping driver. The design is based on an advanced control technology. It applies
Stepper Motor Driver CW230
 Stepper Motor Driver CW230 1. Introduction Descriptions The CW230 driver is a cost-effective and high performance stepping driver. The design is based on an advanced control technology. It applies to two-phase
Stepper Motor Driver CW230 1. Introduction Descriptions The CW230 driver is a cost-effective and high performance stepping driver. The design is based on an advanced control technology. It applies to two-phase
FC Series Signal Conditioners
 FC Series Signal Conditioners FC-33 DC Selectable Signal Conditioner with 3-way isolation Field configurable input and output ranges of 0-5V, 0-10 V, 0-20 ma and 4-20 ma with 1500 VDC isolation between
FC Series Signal Conditioners FC-33 DC Selectable Signal Conditioner with 3-way isolation Field configurable input and output ranges of 0-5V, 0-10 V, 0-20 ma and 4-20 ma with 1500 VDC isolation between
3. What is the difference between Switched Reluctance motor and variable reluctance stepper motor?(may12)
") EE6703 SPECIAL ELECTRICAL MACHINES UNIT III SWITCHED RELUCTANCE MOTOR PART A 1. What is switched reluctance motor? The switched reluctance motor is a doubly salient, singly excited motor. This means that
EE6703 SPECIAL ELECTRICAL MACHINES UNIT III SWITCHED RELUCTANCE MOTOR PART A 1. What is switched reluctance motor? The switched reluctance motor is a doubly salient, singly excited motor. This means that
Teaching Mechanical Students to Build and Analyze Motor Controllers
 Teaching Mechanical Students to Build and Analyze Motor Controllers Hugh Jack, Associate Professor Padnos School of Engineering Grand Valley State University Grand Rapids, MI email: jackh@gvsu.edu Session
Teaching Mechanical Students to Build and Analyze Motor Controllers Hugh Jack, Associate Professor Padnos School of Engineering Grand Valley State University Grand Rapids, MI email: jackh@gvsu.edu Session
PLC BASED RAILWAY LEVEL CROSSING GATE CONTROL
 PLC BASED RAILWAY LEVEL CROSSING GATE CONTROL R.Gopinathan *1 and B.Sivashankar #2 * Assistant professor, Mechatronics, SNS College of Technology, Coimbatore,India. # UG scholar, Mechatronics, SNS College
PLC BASED RAILWAY LEVEL CROSSING GATE CONTROL R.Gopinathan *1 and B.Sivashankar #2 * Assistant professor, Mechatronics, SNS College of Technology, Coimbatore,India. # UG scholar, Mechatronics, SNS College
The Fundamental Characteristics of Novel Switched Reluctance Motor with Segment Core Embedded in Aluminum Rotor Block
 58 Journal of Electrical Engineering & Technology, Vol. 1, No. 1, pp. 58~62, 2006 The Fundamental Characteristics of Novel Switched Reluctance Motor with Segment Core Embedded in Aluminum Rotor Block Jun
58 Journal of Electrical Engineering & Technology, Vol. 1, No. 1, pp. 58~62, 2006 The Fundamental Characteristics of Novel Switched Reluctance Motor with Segment Core Embedded in Aluminum Rotor Block Jun
EE 410/510: Electromechanical Systems Chapter 5
 EE 410/510: Electromechanical Systems Chapter 5 Chapter 5. Induction Machines Fundamental Analysis ayssand dcontrol o of Induction Motors Two phase induction motors Lagrange Eqns. (optional) Torque speed
EE 410/510: Electromechanical Systems Chapter 5 Chapter 5. Induction Machines Fundamental Analysis ayssand dcontrol o of Induction Motors Two phase induction motors Lagrange Eqns. (optional) Torque speed
Sizing Linear and PWM Amplifiers Driving a Rotary Brushless Motor
 1 Sizing Linear and PWM Amplifiers Driving a Rotary Brushless Motor Varedan Technologies Technical Staff Abstract This application note provides a design process for sizing linear and PWM three-phase amplifiers
1 Sizing Linear and PWM Amplifiers Driving a Rotary Brushless Motor Varedan Technologies Technical Staff Abstract This application note provides a design process for sizing linear and PWM three-phase amplifiers
Interface H-bridge to Microcontroller, Battery Power and Gearbox to H-bridge Last Updated September 28, Background
 1 ME313 Project Assignment #2 Interface H-bridge to Microcontroller, Battery Power and Gearbox to H-bridge Last Updated September 28, 2015. Background The objective of the ME313 project is to fabricate
1 ME313 Project Assignment #2 Interface H-bridge to Microcontroller, Battery Power and Gearbox to H-bridge Last Updated September 28, 2015. Background The objective of the ME313 project is to fabricate
DC Motor-Driver H-Bridge Circuit
 Page 1 of 9 David Cook ROBOT ROOM home projects contact copyright & disclaimer books links DC Motor-Driver H-Bridge Circuit Physical motion of some form helps differentiate a robot from a computer. It
Page 1 of 9 David Cook ROBOT ROOM home projects contact copyright & disclaimer books links DC Motor-Driver H-Bridge Circuit Physical motion of some form helps differentiate a robot from a computer. It
BLOCK DIAGRAM OF THE UC3625
 U-115 APPLICATION NOTE New Integrated Circuit Produces Robust, Noise Immune System For Brushless DC Motors Bob Neidorff, Unitrode Integrated Circuits Corp., Merrimack, NH Abstract A new integrated circuit
U-115 APPLICATION NOTE New Integrated Circuit Produces Robust, Noise Immune System For Brushless DC Motors Bob Neidorff, Unitrode Integrated Circuits Corp., Merrimack, NH Abstract A new integrated circuit
Built-in soft-start feature. Up-Slope and Down-Slope. Power-Up safe start feature. Motor will only start if pulse of 1.5ms is detected.
 Thank You for purchasing our TRI-Mode programmable DC Motor Controller. Our DC Motor Controller is the most flexible controller you will find. It is user-programmable and covers most applications. This
Thank You for purchasing our TRI-Mode programmable DC Motor Controller. Our DC Motor Controller is the most flexible controller you will find. It is user-programmable and covers most applications. This
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Stepper Motors WE CREATE MOTION
 WE CREATE MOTIO PRECIstep Technology EW Page FDM 6 Two Phase with Disc Magnet, AM 8 Two Phase,6 AM Two Phase,6 ADM S Two Phase with Disc Magnet, 6 7 AM Two Phase 6 8 AM Two Phase AM -R Two Phase WE CREATE
WE CREATE MOTIO PRECIstep Technology EW Page FDM 6 Two Phase with Disc Magnet, AM 8 Two Phase,6 AM Two Phase,6 ADM S Two Phase with Disc Magnet, 6 7 AM Two Phase 6 8 AM Two Phase AM -R Two Phase WE CREATE
DISCONTINUED PRODUCT FOR REFERENCE ONLY
 23 Data Sheet 23.5A LOAD SUPPLY A PHASEA OUTA OUT 2A V EA 2 3 4 5 6 7 UDN23B VBB V DD 5 3 2 0 SUPPLY B 4 PHASE B OUT B OUT 2B V EB Dwg. No. A-2,455 ABSOLUTE MAXIMUM RATINGS at T J +50 C Load Supply Voltage,
23 Data Sheet 23.5A LOAD SUPPLY A PHASEA OUTA OUT 2A V EA 2 3 4 5 6 7 UDN23B VBB V DD 5 3 2 0 SUPPLY B 4 PHASE B OUT B OUT 2B V EB Dwg. No. A-2,455 ABSOLUTE MAXIMUM RATINGS at T J +50 C Load Supply Voltage,
Sascha Stegen School of Electrical Engineering, Griffith University, Australia
 Sascha Stegen School of Electrical Engineering, Griffith University, Australia Electrical Machines and Drives Motors Generators Power Electronics and Drives Open-loop inverter-fed General arrangement of
Sascha Stegen School of Electrical Engineering, Griffith University, Australia Electrical Machines and Drives Motors Generators Power Electronics and Drives Open-loop inverter-fed General arrangement of
35H6 n n n n n n. 35F6 n n n n n n. E35H6 n n n n n n. Unipolar** 5 VDC 12 VDC 0.24 A 0.57 A. 30 mh. 6.5 mh 5.7 W gcm 2
 HAYD: 0 756 7 5000 Series: Size Single Stack Stepper Motor Linear Actuator Haydon 5000 Series Size hybrid linear actuators have been improved to provide higher force, longer life and improved performance.
HAYD: 0 756 7 5000 Series: Size Single Stack Stepper Motor Linear Actuator Haydon 5000 Series Size hybrid linear actuators have been improved to provide higher force, longer life and improved performance.
GCSE Electronics. Scheme of Work
 GCSE Electronics Scheme of Work Week Topic Detail Notes 1 Practical skills assemble a circuit using a diagram recognize a component from its physical appearance (This is a confidence building/motivating
GCSE Electronics Scheme of Work Week Topic Detail Notes 1 Practical skills assemble a circuit using a diagram recognize a component from its physical appearance (This is a confidence building/motivating
PERMANENT MAGNET STEPPER AND GEARED MOTORS DIGITAL LINEAR ACTUATORS BRUSHLESS DC MOTORS
 PERMANENT MAGNET STEPPER AND GEARED MOTORS DIGITAL LINEAR ACTUATORS BRUSHLESS DC MOTORS CUSTOMIZATI TO MEET YOUR PRECISE DESIGN NEEDS FAST, POWERFUL, PRECISE POSITIING LARGE SELECTI OF PERMANENT MAGNET
PERMANENT MAGNET STEPPER AND GEARED MOTORS DIGITAL LINEAR ACTUATORS BRUSHLESS DC MOTORS CUSTOMIZATI TO MEET YOUR PRECISE DESIGN NEEDS FAST, POWERFUL, PRECISE POSITIING LARGE SELECTI OF PERMANENT MAGNET
Non-Dissipative Control Saves Power And Cost In Stepper Motor Applications
 ISSUE: August 2012 Non-Dissipative Control Saves Power And Cost In Stepper Motor Applications by Enrico Poli and Jean-Jacques Meneu, STMicroelectronics, Agrate, Italy A stepper motor needs to control the
ISSUE: August 2012 Non-Dissipative Control Saves Power And Cost In Stepper Motor Applications by Enrico Poli and Jean-Jacques Meneu, STMicroelectronics, Agrate, Italy A stepper motor needs to control the
Activity 4: Due before the lab during the week of Feb
 Today's Plan Announcements: Lecture Test 2 programming in C Activity 4 Serial interfaces Analog output Driving external loads Motors: dc motors, stepper motors, servos Lecture Test Activity 4: Due before
Today's Plan Announcements: Lecture Test 2 programming in C Activity 4 Serial interfaces Analog output Driving external loads Motors: dc motors, stepper motors, servos Lecture Test Activity 4: Due before
PART 2 - ACTUATORS. 6.0 Stepper Motors. 6.1 Principle of Operation
 6.1 Principle of Operation PART 2 - ACTUATORS 6.0 The actuator is the device that mechanically drives a dynamic system - Stepper motors are a popular type of actuators - Unlike continuous-drive actuators,
6.1 Principle of Operation PART 2 - ACTUATORS 6.0 The actuator is the device that mechanically drives a dynamic system - Stepper motors are a popular type of actuators - Unlike continuous-drive actuators,
Detect stepper motor stall with back EMF technique (Part 1)
") Detect stepper motor stall with back EMF technique (Part 1) Learn about this method that takes advantage of constant motor parameters and overcomes limitations of traditional stall detection of current
Detect stepper motor stall with back EMF technique (Part 1) Learn about this method that takes advantage of constant motor parameters and overcomes limitations of traditional stall detection of current
SMART Funded by The National Science Foundation
 Lecture 5 Capacitors 1 Store electric charge Consists of two plates of a conducting material separated by a space filled by an insulator Measured in units called farads, F Capacitors 2 Mylar Ceramic Electrolytic
Lecture 5 Capacitors 1 Store electric charge Consists of two plates of a conducting material separated by a space filled by an insulator Measured in units called farads, F Capacitors 2 Mylar Ceramic Electrolytic
Motomatic Servo Control
 Exercise 2 Motomatic Servo Control This exercise will take two weeks. You will work in teams of two. 2.0 Prelab Read through this exercise in the lab manual. Using Appendix B as a reference, create a block
Exercise 2 Motomatic Servo Control This exercise will take two weeks. You will work in teams of two. 2.0 Prelab Read through this exercise in the lab manual. Using Appendix B as a reference, create a block
QUAD DARLINGTON POWER DRIVER
 540 Data Sheet 37C OUT 4 K OUT 3 UDN540B 6 5 3 4 4 3 IN 4 IN 3 ENABLE Combining AND logic gates and inverting high-current bipolar outputs, the UDN540B and A540SLB quad Darlington power drivers provide
540 Data Sheet 37C OUT 4 K OUT 3 UDN540B 6 5 3 4 4 3 IN 4 IN 3 ENABLE Combining AND logic gates and inverting high-current bipolar outputs, the UDN540B and A540SLB quad Darlington power drivers provide
MEM01: DC-Motor Servomechanism
 MEM01: DC-Motor Servomechanism Interdisciplinary Automatic Controls Laboratory - ME/ECE/CHE 389 February 5, 2016 Contents 1 Introduction and Goals 1 2 Description 2 3 Modeling 2 4 Lab Objective 5 5 Model
MEM01: DC-Motor Servomechanism Interdisciplinary Automatic Controls Laboratory - ME/ECE/CHE 389 February 5, 2016 Contents 1 Introduction and Goals 1 2 Description 2 3 Modeling 2 4 Lab Objective 5 5 Model
Renewable Energy Based Interleaved Boost Converter
 Renewable Energy Based Interleaved Boost Converter Pradeepakumara V 1, Nagabhushan patil 2 PG Scholar 1, Professor 2 Department of EEE Poojya Doddappa Appa College of Engineering, Kalaburagi, Karnataka,
Renewable Energy Based Interleaved Boost Converter Pradeepakumara V 1, Nagabhushan patil 2 PG Scholar 1, Professor 2 Department of EEE Poojya Doddappa Appa College of Engineering, Kalaburagi, Karnataka,
INSTITUTE OF AERONAUTICAL ENGINEERING Dundigal, Hyderabad
 Course Name Course Code Class Branch INSTITUTE OF AERONAUTICAL ENGINEERING Dundigal, Hyderabad -500 043 AERONAUTICAL ENGINEERING TUTORIAL QUESTION BANK : ELECTRICAL AND ELECTRONICS ENGINEERING : A40203
Course Name Course Code Class Branch INSTITUTE OF AERONAUTICAL ENGINEERING Dundigal, Hyderabad -500 043 AERONAUTICAL ENGINEERING TUTORIAL QUESTION BANK : ELECTRICAL AND ELECTRONICS ENGINEERING : A40203
PERMANENT MAGNET STEPPER AND GEARED MOTORS DIGITAL LINEAR ACTUATORS BRUSHLESS DC MOTORS
 PERMANENT MAGNET STEPPER AND GEARED MOTORS DIGITAL LINEAR ACTUATORS BRUSHLESS DC MOTORS CUSTOMIZATI TO MEET YOUR PRECISE DESIGN NEEDS FAST, POWERFUL, PRECISE POSITIING LARGE SELECTI OF PERMANENT MAGNET
PERMANENT MAGNET STEPPER AND GEARED MOTORS DIGITAL LINEAR ACTUATORS BRUSHLESS DC MOTORS CUSTOMIZATI TO MEET YOUR PRECISE DESIGN NEEDS FAST, POWERFUL, PRECISE POSITIING LARGE SELECTI OF PERMANENT MAGNET
PKG-232-MBC12-PS-CBL System Diagram and Specifications
 PKG-232-MBC12-PS-CBL System Diagram and Specifications Included Components: 23Y206S-LW8-MS Stepper Motor MBC12101 Stepper Driver PSA80V4A-1 Power Supply CBL-18AWG-04C-010-MS Motor Cable WIR-1007-18-YEL
PKG-232-MBC12-PS-CBL System Diagram and Specifications Included Components: 23Y206S-LW8-MS Stepper Motor MBC12101 Stepper Driver PSA80V4A-1 Power Supply CBL-18AWG-04C-010-MS Motor Cable WIR-1007-18-YEL
Speed Control of DC Motor Using Microcontroller
 2015 IJSRST Volume 1 Issue 2 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science Speed Control of DC Motor Using Microcontroller Katke S.P *1, Rangdal S.M 2 * 1 Electrical Department,
2015 IJSRST Volume 1 Issue 2 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science Speed Control of DC Motor Using Microcontroller Katke S.P *1, Rangdal S.M 2 * 1 Electrical Department,
ECET 211 Electric Machines & Controls Lecture 4-2 Motor Control Devices: Lecture 4 Motor Control Devices
 ECET 211 Electric Machines & Controls Lecture 4-2 Motor Control Devices: Part 3. Sensors, Part 4. Actuators Text Book: Electric Motors and Control Systems, by Frank D. Petruzella, published by McGraw Hill,
ECET 211 Electric Machines & Controls Lecture 4-2 Motor Control Devices: Part 3. Sensors, Part 4. Actuators Text Book: Electric Motors and Control Systems, by Frank D. Petruzella, published by McGraw Hill,
Modeling Position Tracking System with Stepper Motor
 Modeling Position Tracking System with Stepper Motor Shreeji S. Sheth 1, Pankaj Kr. Gupta 2, J. K. Hota 3 Abstract The position tracking system is used in many applications like pointing an antenna towards
Modeling Position Tracking System with Stepper Motor Shreeji S. Sheth 1, Pankaj Kr. Gupta 2, J. K. Hota 3 Abstract The position tracking system is used in many applications like pointing an antenna towards
INSTITUTE OF AERONAUTICAL ENGINEERING (AUTONOMOUS)
") Name Code Class Branch INSTITUTE OF AERONAUTICAL ENGINEERING (AUTONOMOUS) Dundigal, Hyderabad -500 043 CIVIL ENGINEERING TUTORIAL QUESTION BANK : ELECTRICAL AND ELECTRONICS ENGINEERING : A30203 : II B.
Name Code Class Branch INSTITUTE OF AERONAUTICAL ENGINEERING (AUTONOMOUS) Dundigal, Hyderabad -500 043 CIVIL ENGINEERING TUTORIAL QUESTION BANK : ELECTRICAL AND ELECTRONICS ENGINEERING : A30203 : II B.