Precision Estimation of GPS Devices in Static and Dynamic Modes
|
|
|
- Mildred Farmer
- 6 years ago
- Views:
Transcription
1 Transporta elektronikas un telemātikas katedra RTU ETF Precision Estimation of GPS Devices in Static and Dynamic Modes A. Kluga, V. Beļinska, I. Mitrofanovs, J. Kluga Department of Transport Electronics and Telematics, Riga Technical University United Nations/Latvia Workshop on the Applications of Global Navigation Satellite Systems May
2 Transporta elektronikas un telemātikas katedra RTU ETF Riga Technical University Department of Transport Electronics and Telematics Profesor Ansis Kluga United Nations/Latvia Workshop on the Applications of Global Navigation Satellite Systems May


3 RTU ETF Transporta elektronikas un telemātikas katedra Precision estimation with Re-reference system Receiving antenna of Re-reference system and indoor antenna of Re-reference system
4 RTU ETF Transporta elektronikas un telemātikas katedra Precision estimation with Re-reference system =1/ 'Garmin_eTrex.dat' m Histogram of Latitude Horizontal Errors
5 RTU ETF Transporta elektronikas un telemātikas katedra Precision estimation with Re-reference system =1/ 'Garmin_gps101w.dat' m Histogram of Latitude Horizontal Errors
6 Transporta elektronikas un telemātikas katedra RTU ETF Accuracy Estimation of GPS Receiver Parameters with Simulator in Dynamic Mode


7 Spirent STR-4500 GPS satellite signal simulator was used for all experiments
8 Position fix when satellite signals are lost 1. By using Spirent STR-4500 GPS satellite signal simulator, we modeled uniform motion (i.e. no acceleration). 2. The trajectory of motion is linear, and velocity is approx. 60 km/h. 3. In the middle of the experiment transmitting antenna has been disengaged for 10 minutes
9
10 Position fix and velocity errors in simple vehicle dynamics For these experiments we have requested from Spirent 4 scenarios: Variable latitude, constant longitude, velocity range km/h Variable longitude, constant latitude, velocity range km/h Variable latitude, constant longitude, velocity range km/h Variable longitude, constant latitude, velocity range km/h
11 Position fix and velocity errors in simple vehicle dynamics For various our GPS receivers we have estimated the following values: Velocity error; Position fix radial error. We have estimated mean values and RMS of these two errors as well.
12 Position fix and velocity errors in simple vehicle dynamics Example: Velocity error for Graymark GPS-101, 800 km/h velocity profile ε s, km/h
13 Position fix and velocity errors in simple vehicle dynamics Example: Velocity error RMS for all GPS receivers over time intervals
14 Combined Information Processing from GPS and IMU using Kalman Filtering Algorithm






15 Current research and study have emphasized on using low cost IMU and GPS integration by the benefit of computing power and low price of IMU. The vehicle kinematics is obtained by a Holux GPS and a Motion Node IMU sensor.
16 Kinematics test results Fig. 1. Accelerometer measurements before and after postcalibration process Fig. 2. Estimation of vehicle velocity, when v=60 km/h Fig. 3. Estimation of vehicle velocity, when v=60 km/h (zooming in of the Fig.2 at time interval from t= 50s till t=100 s) Fig. 4. Estimation of accelerometer bias, when v=60 km/h
17 GPS and IMU Complex System Experimental Research
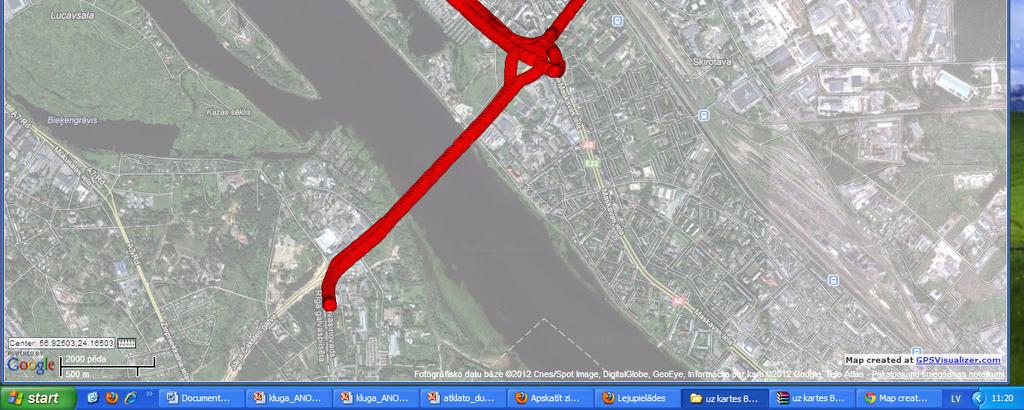
18 These studies used the company Xsens a complex system of MTI-G, which consists of 12 channel GPS receiver and the inertial sensor with barometric altitude meter and magnetometers. To convert data from Xsens file format NMEA compatible format, suitable for data processing with GPS-oriented programs, we developed a conversion program.



19 Measurements on the bridge: a) with GPS, b) using GPS and IMU date complex processing As seen from the maps shown the complex information-processing improves the measurement accuracy. After treatment using Least-Squares Fitting (LSF) these data can provide highly accurate results
20 Very widespread is the applications of complex system (GPS and IMU) in transport systems. Our studies have dealt with the possibility of using this system for underground radar

21 Trajectory measurements reflecting on the map in underground radar
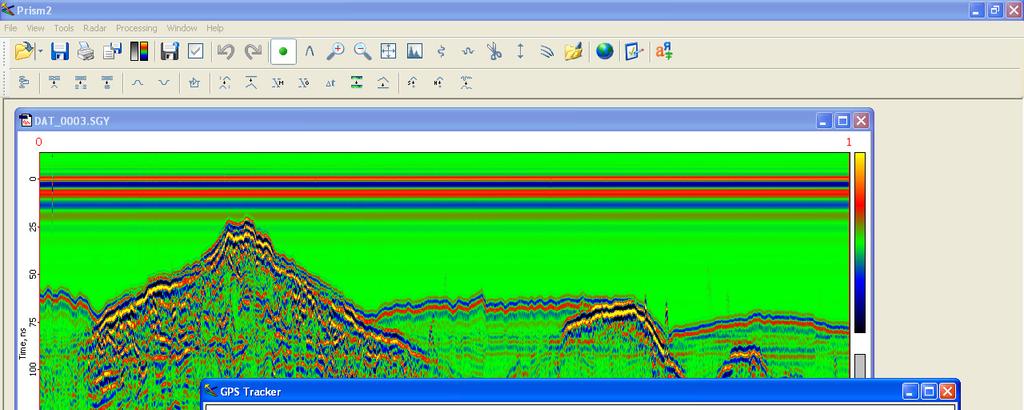
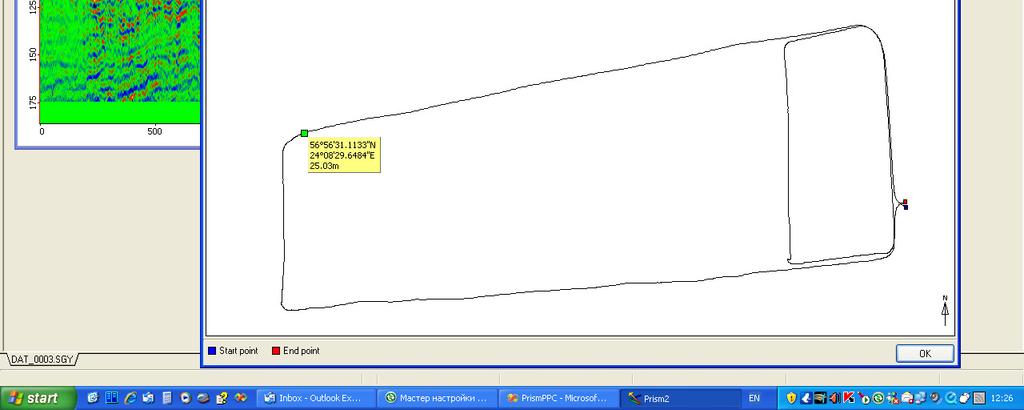
22 Trajectory measurements in underground radar
23 Real-time kinematic RTK makes use of carrier-phase and pseudorange measurements recorded at a (usually) fixed reference location with known coordinates and transmitted in real time to a user's rover receiver using a radio link of some kind.
24 Satellites signals W1 Outdoor system Correction station W2 Amplifier Indoor system GPRS data exchange GSM radio receivertransmitter GRS-1 receiver with GPS antenna Data registration equipment Bluetooth connection
25

 these data can provide highly")
26 We use GPS device Topkons Hiper+ Measurements on the bridge After treatment using Least-Squares Fitting (LSF) these data can provide highly accurate results

27 Mobil system Topcon for RTK measurements

28 Results of measurements

29 Results of velocity measurements
30 Publications 1. Bistrovs V.,Kluga A. MEMS INS/GPS Data Fusion using Particle Filter//Electronics and Electrical Engineering (2011) lpp. 2. Bistrov V. Study of the Characteristics of Random Errors in Measurements by MEMS Inertial Sensors//Journal Automatic Control and Computer Sciences (2011) lpp. 3. Klūga A., Klūga J. Dynamic Data Processing with Kalman Filter // Electronics and Electrical Engineering (2011) lpp. 4. Kluga A., Grabs E., Zelenkovs A., Belinska V. Accuracy estimation of GPS receiver parameters with simulator in dynamic mode // Electronics and Electrical Engineering. 6 (94). (2009) pp Bistrovs V., Klūga A. Combined information processing from GPS and IMU using Kalman filtering algorithm // Electronics and Electrical Engineering. - 5(93). (2009) pp Beļinska V., Grabs E., Klūga J., Klūga A. Estimation of GPS Receiver Parameters with Re-reference System and Signal Simulator // Electronics and Electrical Engineering. No.5(85) (2008), lpp.
31 Publications Feedback Hello, My name is Haiyu Lan, I am a student from Haerbin Engineering University, China. I have just begun my PhD study this year, so I am looking for an academic research direction now. Recently, I have read one of your articles, MEMS INS GPS Data Fusion using Particle Filter and deeply attracted by your inventions and ideas These days I have read many articles related to the MEMS-IMU Navigation System, your technics is absolutely good in my opinion. These articles and your explain will give me a clear academic research direction. I think your approach is really novel and attractive, and also I really like to study your theories by practice, also luckily, there is a MEMS-IMU in my lab. Now I am trying!!! My address is lanhaiyu@126.com Finally, thank you for your patience again! Best regards Haiyu Lan
32 Department of Transport electronics and telematics, Riga Technical University Thank you for attention! Ansis Klūga Phone: Web:
GPS-Aided INS Datasheet Rev. 2.6
 GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
GPS-Aided INS Datasheet Rev. 2.7
 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
GPS-Aided INS Datasheet Rev. 2.3
 GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
GPS-Aided INS Datasheet Rev. 3.0
 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
Cooperative localization (part I) Jouni Rantakokko
 Jouni Rantakokko") Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Inertial Sensors. Ellipse 2 Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Inertial Sensors. Ellipse 2 Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Integrated Navigation System
 Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
Working towards scenario-based evaluations of first responder positioning systems
 Working towards scenario-based evaluations of first responder positioning systems Jouni Rantakokko, Peter Händel, Joakim Rydell, Erika Emilsson Swedish Defence Research Agency, FOI Royal Institute of Technology,
Working towards scenario-based evaluations of first responder positioning systems Jouni Rantakokko, Peter Händel, Joakim Rydell, Erika Emilsson Swedish Defence Research Agency, FOI Royal Institute of Technology,
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Inertial Navigation System
 Apogee Marine Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Navigation, Motion & Heave Sensing APOGEE SERIES makes high accuracy affordable for all surveying
Apogee Marine Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Navigation, Motion & Heave Sensing APOGEE SERIES makes high accuracy affordable for all surveying
Accuracy Estimation of GPS Receiver Parameters with Simulator in Dynamic Mode
 ELECTRONICS AND ELECTRICAL ENGINEERING ISSN 1392 1215 2009. No. 6(94) ELEKTRONIKA IR ELEKTROTECHNIKA T170 ELECTRONICS ELEKTRONIKA Accuracy Estimation of GPS Receiver Parameters with Simulator in Dynamic
ELECTRONICS AND ELECTRICAL ENGINEERING ISSN 1392 1215 2009. No. 6(94) ELEKTRONIKA IR ELEKTROTECHNIKA T170 ELECTRONICS ELEKTRONIKA Accuracy Estimation of GPS Receiver Parameters with Simulator in Dynamic
Satellite and Inertial Attitude. A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu
 Satellite and Inertial Attitude and Positioning System A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu Outline Project Introduction Theoretical Background Inertial
Satellite and Inertial Attitude and Positioning System A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu Outline Project Introduction Theoretical Background Inertial
Ubiquitous Positioning: A Pipe Dream or Reality?
 Ubiquitous Positioning: A Pipe Dream or Reality? Professor Terry Moore The University of What is Ubiquitous Positioning? Multi-, low-cost and robust positioning Based on single or multiple users Different
Ubiquitous Positioning: A Pipe Dream or Reality? Professor Terry Moore The University of What is Ubiquitous Positioning? Multi-, low-cost and robust positioning Based on single or multiple users Different
Inertially Aided RTK Performance Evaluation
 Inertially Aided RTK Performance Evaluation Bruno M. Scherzinger, Applanix Corporation, Richmond Hill, Ontario, Canada BIOGRAPHY Dr. Bruno M. Scherzinger obtained the B.Eng. degree from McGill University
Inertially Aided RTK Performance Evaluation Bruno M. Scherzinger, Applanix Corporation, Richmond Hill, Ontario, Canada BIOGRAPHY Dr. Bruno M. Scherzinger obtained the B.Eng. degree from McGill University
Inertial Navigation System
 Apogee Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Motion Sensing & Georeferencing APOGEE SERIES makes high accuracy affordable for all surveying companies.
Apogee Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Motion Sensing & Georeferencing APOGEE SERIES makes high accuracy affordable for all surveying companies.
A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology
 A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology Tatyana Bourke, Applanix Corporation Abstract This paper describes a post-processing software package that
A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology Tatyana Bourke, Applanix Corporation Abstract This paper describes a post-processing software package that
INTRODUCTION TO VEHICLE NAVIGATION SYSTEM LECTURE 5.1 SGU 4823 SATELLITE NAVIGATION
 INTRODUCTION TO VEHICLE NAVIGATION SYSTEM LECTURE 5.1 SGU 4823 SATELLITE NAVIGATION AzmiHassan SGU4823 SatNav 2012 1 Navigation Systems Navigation ( Localisation ) may be defined as the process of determining
INTRODUCTION TO VEHICLE NAVIGATION SYSTEM LECTURE 5.1 SGU 4823 SATELLITE NAVIGATION AzmiHassan SGU4823 SatNav 2012 1 Navigation Systems Navigation ( Localisation ) may be defined as the process of determining
Revisions Revision Date By Changes A 11 Feb 2013 MHA Initial release , Xsens Technologies B.V. All rights reserved. Information in this docum
 MTi 10-series and MTi 100-series Document MT0503P, Revision 0 (DRAFT), 11 Feb 2013 Xsens Technologies B.V. Pantheon 6a P.O. Box 559 7500 AN Enschede The Netherlands phone +31 (0)88 973 67 00 fax +31 (0)88
MTi 10-series and MTi 100-series Document MT0503P, Revision 0 (DRAFT), 11 Feb 2013 Xsens Technologies B.V. Pantheon 6a P.O. Box 559 7500 AN Enschede The Netherlands phone +31 (0)88 973 67 00 fax +31 (0)88
Assessing the likelihood of GNSS spoofing attacks on RPAS
 Assessing the likelihood of GNSS spoofing attacks on RPAS Mike Maarse UvA/NLR 30-06-2016 Mike Maarse (UvA/NLR) RP2 Presentation 30-06-2016 1 / 25 Introduction Motivation/relevance Growing number of RPAS
Assessing the likelihood of GNSS spoofing attacks on RPAS Mike Maarse UvA/NLR 30-06-2016 Mike Maarse (UvA/NLR) RP2 Presentation 30-06-2016 1 / 25 Introduction Motivation/relevance Growing number of RPAS
Measurement Level Integration of Multiple Low-Cost GPS Receivers for UAVs
 Measurement Level Integration of Multiple Low-Cost GPS Receivers for UAVs Akshay Shetty and Grace Xingxin Gao University of Illinois at Urbana-Champaign BIOGRAPHY Akshay Shetty is a graduate student in
Measurement Level Integration of Multiple Low-Cost GPS Receivers for UAVs Akshay Shetty and Grace Xingxin Gao University of Illinois at Urbana-Champaign BIOGRAPHY Akshay Shetty is a graduate student in
ENHANCEMENTS IN UAV FLIGHT CONTROL AND SENSOR ORIENTATION
 Heinz Jürgen Przybilla Manfred Bäumker, Alexander Zurhorst ENHANCEMENTS IN UAV FLIGHT CONTROL AND SENSOR ORIENTATION Content Introduction Precise Positioning GNSS sensors and software Inertial and augmentation
Heinz Jürgen Przybilla Manfred Bäumker, Alexander Zurhorst ENHANCEMENTS IN UAV FLIGHT CONTROL AND SENSOR ORIENTATION Content Introduction Precise Positioning GNSS sensors and software Inertial and augmentation
Name: Chengming Jin Supervisor: Allison Kealy. GNSS-based Positioning Scheme & Application in Safety-critical Systems of Rail Transport
 Name: Chengming Jin Supervisor: Allison Kealy GNSS-based Positioning Scheme & Application in Safety-critical Systems of Rail Transport CONTENT 1 Introduction 2 Challenges 3 Solutions Introduction How Modern
Name: Chengming Jin Supervisor: Allison Kealy GNSS-based Positioning Scheme & Application in Safety-critical Systems of Rail Transport CONTENT 1 Introduction 2 Challenges 3 Solutions Introduction How Modern
MTi 100-series The most accurate and complete MEMS AHRS and GPS/INS
 Orientation. Position. Xsens. MTi 100-series The most accurate and complete MEMS AHRS and GPS/INS The 4th generation MTi sets the new industry standard for reliable MEMS based INS s, AHRS s, VRU s and
Orientation. Position. Xsens. MTi 100-series The most accurate and complete MEMS AHRS and GPS/INS The 4th generation MTi sets the new industry standard for reliable MEMS based INS s, AHRS s, VRU s and
Wavelet Denoising Technique for Improvement of the Low Cost MEMS-GPS Integrated System
 International Symposium on GPS/GNSS October 6-8,. Wavelet Denoising Technique for Improvement of the Low Cost MEMS-GPS Integrated System Chul Woo Kang, Chang Ho Kang, and Chan Gook Park 3* Seoul National
International Symposium on GPS/GNSS October 6-8,. Wavelet Denoising Technique for Improvement of the Low Cost MEMS-GPS Integrated System Chul Woo Kang, Chang Ho Kang, and Chan Gook Park 3* Seoul National
Inertial Systems. Ekinox Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
LOCALIZATION WITH GPS UNAVAILABLE
 LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
CODEVINTEC. Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems
 45 27 39.384 N 9 07 30.145 E Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems Aerospace Land/Automotive Marine Subsea Miniature inertial sensors 0.1 Ellipse Series New
45 27 39.384 N 9 07 30.145 E Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems Aerospace Land/Automotive Marine Subsea Miniature inertial sensors 0.1 Ellipse Series New
Real time pedestrian navigation system
 Real time pedestrian navigation system Damien Kubrak, Christophe Macabiau, Michel Monnerat To cite this version: Damien Kubrak, Christophe Macabiau, Michel Monnerat. Real time pedestrian navigation system.
Real time pedestrian navigation system Damien Kubrak, Christophe Macabiau, Michel Monnerat To cite this version: Damien Kubrak, Christophe Macabiau, Michel Monnerat. Real time pedestrian navigation system.
Utility of Sensor Fusion of GPS and Motion Sensor in Android Devices In GPS- Deprived Environment
 Utility of Sensor Fusion of GPS and Motion Sensor in Android Devices In GPS- Deprived Environment Amrit Karmacharya1 1 Land Management Training Center Bakhundol, Dhulikhel, Kavre, Nepal Tel:- +977-9841285489
Utility of Sensor Fusion of GPS and Motion Sensor in Android Devices In GPS- Deprived Environment Amrit Karmacharya1 1 Land Management Training Center Bakhundol, Dhulikhel, Kavre, Nepal Tel:- +977-9841285489
CENG 5931 HW 5 Mobile Robotics Due March 5. Sensors for Mobile Robots
 CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
CENG 5931 HW 5 Mobile Robotics Due March 5 Sensors for Mobile Robots Dr. T. L. Harman: 281 283-3774 Office D104 For reports: Read HomeworkEssayRequirements on the web site and follow instructions which
Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation
 Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation Zhaonian Zhang, Department of Geomatics Engineering, The University of Calgary BIOGRAPHY Zhaonian Zhang is a MSc student
Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation Zhaonian Zhang, Department of Geomatics Engineering, The University of Calgary BIOGRAPHY Zhaonian Zhang is a MSc student
If you want to use an inertial measurement system...
 If you want to use an inertial measurement system...... which technical data you should analyse and compare before making your decision by Dr.-Ing. E. v. Hinueber, imar Navigation GmbH Keywords: inertial
If you want to use an inertial measurement system...... which technical data you should analyse and compare before making your decision by Dr.-Ing. E. v. Hinueber, imar Navigation GmbH Keywords: inertial
Design of Accurate Navigation System by Integrating INS and GPS using Extended Kalman Filter
 Design of Accurate Navigation System by Integrating INS and GPS using Extended Kalman Filter Santhosh Kumar S. A 1, 1 M.Tech student, Digital Electronics and Communication Systems, PES institute of technology,
Design of Accurate Navigation System by Integrating INS and GPS using Extended Kalman Filter Santhosh Kumar S. A 1, 1 M.Tech student, Digital Electronics and Communication Systems, PES institute of technology,
Motion Reference Units
 Motion Reference Units MRU Datasheet Rev. 1.3 IP-67 sealed 5% / 5 cm Heave accuracy 0.03 m/sec Velocity accuracy 0.05 deg Pitch and Roll accuracy 0.005 m/sec2 Acceleration accuracy 0.0002 deg/sec Angular
Motion Reference Units MRU Datasheet Rev. 1.3 IP-67 sealed 5% / 5 cm Heave accuracy 0.03 m/sec Velocity accuracy 0.05 deg Pitch and Roll accuracy 0.005 m/sec2 Acceleration accuracy 0.0002 deg/sec Angular
ASSESSMENT OF USEFULNESS OF THE MEMS-BASED INTEGRATED NAVIGATION UNIT IN CAR NAVIGATION
 Technical Sciences, 2017, 20(4), 321 331 ASSESSMENT OF USEFULNESS OF THE MEMS-BASED INTEGRATED NAVIGATION UNIT IN CAR NAVIGATION Marcin Uradziński 1, Jacek Rapiński 1, Dariusz Tomaszewski 1, Michał Śmieja
Technical Sciences, 2017, 20(4), 321 331 ASSESSMENT OF USEFULNESS OF THE MEMS-BASED INTEGRATED NAVIGATION UNIT IN CAR NAVIGATION Marcin Uradziński 1, Jacek Rapiński 1, Dariusz Tomaszewski 1, Michał Śmieja
SENLUTION Miniature Angular & Heading Reference System The World s Smallest Mini-AHRS
 SENLUTION Miniature Angular & Heading Reference System The World s Smallest Mini-AHRS MotionCore, the smallest size AHRS in the world, is an ultra-small form factor, highly accurate inertia system based
SENLUTION Miniature Angular & Heading Reference System The World s Smallest Mini-AHRS MotionCore, the smallest size AHRS in the world, is an ultra-small form factor, highly accurate inertia system based
Formula Student Racing Championship: Design and implementation of an automatic localization and trajectory tracking system
 Formula Student Racing Championship: Design and implementation of an automatic localization and trajectory tracking system Diogo Carvalho diogo.carvalho@ist.utl.pt Instituto Superior Técnico Abstract.
Formula Student Racing Championship: Design and implementation of an automatic localization and trajectory tracking system Diogo Carvalho diogo.carvalho@ist.utl.pt Instituto Superior Técnico Abstract.
MTi 100-series The most accurate and complete MEMS AHRS and GPS/INS
 Orientation. Position. Xsens. MTi 100-series The most accurate and complete MEMS AHRS and GPS/INS The 4th generation MTi sets the new industry standard for reliable MEMS based INSs AHRSs, VRUs and IMUs.
Orientation. Position. Xsens. MTi 100-series The most accurate and complete MEMS AHRS and GPS/INS The 4th generation MTi sets the new industry standard for reliable MEMS based INSs AHRSs, VRUs and IMUs.
SERIES VECTORNAV TACTICAL SERIES VN-110 IMU/AHRS VN-210 GNSS/INS VN-310 DUAL GNSS/INS
 TACTICAL VECTORNAV SERIES TACTICAL SERIES VN110 IMU/AHRS VN210 GNSS/INS VN310 DUAL GNSS/INS VectorNav introduces the Tactical Series, a nextgeneration, MEMS inertial navigation platform that features highperformance
TACTICAL VECTORNAV SERIES TACTICAL SERIES VN110 IMU/AHRS VN210 GNSS/INS VN310 DUAL GNSS/INS VectorNav introduces the Tactical Series, a nextgeneration, MEMS inertial navigation platform that features highperformance
NavShoe Pedestrian Inertial Navigation Technology Brief
 NavShoe Pedestrian Inertial Navigation Technology Brief Eric Foxlin Aug. 8, 2006 WPI Workshop on Precision Indoor Personnel Location and Tracking for Emergency Responders The Problem GPS doesn t work indoors
NavShoe Pedestrian Inertial Navigation Technology Brief Eric Foxlin Aug. 8, 2006 WPI Workshop on Precision Indoor Personnel Location and Tracking for Emergency Responders The Problem GPS doesn t work indoors
Simulation of GPS-based Launch Vehicle Trajectory Estimation using UNSW Kea GPS Receiver
 Simulation of GPS-based Launch Vehicle Trajectory Estimation using UNSW Kea GPS Receiver Sanat Biswas Australian Centre for Space Engineering Research, UNSW Australia, s.biswas@unsw.edu.au Li Qiao School
Simulation of GPS-based Launch Vehicle Trajectory Estimation using UNSW Kea GPS Receiver Sanat Biswas Australian Centre for Space Engineering Research, UNSW Australia, s.biswas@unsw.edu.au Li Qiao School
GPS and Recent Alternatives for Localisation. Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney
 GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
Performance Evaluation of Differential Global Navigation Satellite System with RTK Corrections
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p- ISSN: 2278-8735.Volume 9, Issue 2, Ver. VI (Mar - Apr. 2014), PP 43-47 Performance Evaluation of Differential
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p- ISSN: 2278-8735.Volume 9, Issue 2, Ver. VI (Mar - Apr. 2014), PP 43-47 Performance Evaluation of Differential
INDOOR HEADING MEASUREMENT SYSTEM
 INDOOR HEADING MEASUREMENT SYSTEM Marius Malcius Department of Research and Development AB Prospero polis, Lithuania m.malcius@orodur.lt Darius Munčys Department of Research and Development AB Prospero
INDOOR HEADING MEASUREMENT SYSTEM Marius Malcius Department of Research and Development AB Prospero polis, Lithuania m.malcius@orodur.lt Darius Munčys Department of Research and Development AB Prospero
WPI Precision Personnel Locator: Inverse Synthetic Array Reconciliation Tomography Performance. Co-authors: M. Lowe, D. Cyganski, R. J.
 WPI Precision Personnel Locator: Inverse Synthetic Array Reconciliation Tomography Performance Presented by: Andrew Cavanaugh Co-authors: M. Lowe, D. Cyganski, R. J. Duckworth Introduction 2 PPL Project
WPI Precision Personnel Locator: Inverse Synthetic Array Reconciliation Tomography Performance Presented by: Andrew Cavanaugh Co-authors: M. Lowe, D. Cyganski, R. J. Duckworth Introduction 2 PPL Project
Precise Robust Positioning with Inertial/GPS RTK
 Precise Robust Positioning with Inertial/GPS RTK Bruno M. Scherzinger, Applanix Corporation, Richmond Hill, Ontario, Canada BIOGRAPHY Dr. Bruno M. Scherzinger obtained the B.Eng. degree from McGill University
Precise Robust Positioning with Inertial/GPS RTK Bruno M. Scherzinger, Applanix Corporation, Richmond Hill, Ontario, Canada BIOGRAPHY Dr. Bruno M. Scherzinger obtained the B.Eng. degree from McGill University
PHINS, An All-In-One Sensor for DP Applications
 DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
Webinar. 9 things you should know about centimeter-level GNSS accuracy
 Webinar 9 things you should know about centimeter-level GNSS accuracy Webinar agenda 9 things you should know about centimeter-level GNSS accuracy 1. High precision GNSS challenges 2. u-blox F9 technology
Webinar 9 things you should know about centimeter-level GNSS accuracy Webinar agenda 9 things you should know about centimeter-level GNSS accuracy 1. High precision GNSS challenges 2. u-blox F9 technology
Utilizing Batch Processing for GNSS Signal Tracking
 Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
ATLANS-C. mobile mapping position and orientation solution
 mobile mapping position and orientation solution mobile mapping position and orientation solution THE SMALLEST ATLANS-C is a high performance all-in-one position and orientation solution for both land
mobile mapping position and orientation solution mobile mapping position and orientation solution THE SMALLEST ATLANS-C is a high performance all-in-one position and orientation solution for both land
Evaluating OTDOA Technology for VoLTE E911 Indoors
 Evaluating OTDOA Technology for VoLTE E911 Indoors Introduction As mobile device usage becomes more and more ubiquitous, there is an increasing need for location accuracy, especially in the event of an
Evaluating OTDOA Technology for VoLTE E911 Indoors Introduction As mobile device usage becomes more and more ubiquitous, there is an increasing need for location accuracy, especially in the event of an
Some Signal Processing Techniques for Wireless Cooperative Localization and Tracking
 Some Signal Processing Techniques for Wireless Cooperative Localization and Tracking Hadi Noureddine CominLabs UEB/Supélec Rennes SCEE Supélec seminar February 20, 2014 Acknowledgments This work was performed
Some Signal Processing Techniques for Wireless Cooperative Localization and Tracking Hadi Noureddine CominLabs UEB/Supélec Rennes SCEE Supélec seminar February 20, 2014 Acknowledgments This work was performed
Agenda Motivation Systems and Sensors Algorithms Implementation Conclusion & Outlook
 Overview of Current Indoor Navigation Techniques and Implementation Studies FIG ww 2011 - Marrakech and Christian Lukianto HafenCity University Hamburg 21 May 2011 1 Agenda Motivation Systems and Sensors
Overview of Current Indoor Navigation Techniques and Implementation Studies FIG ww 2011 - Marrakech and Christian Lukianto HafenCity University Hamburg 21 May 2011 1 Agenda Motivation Systems and Sensors
Primer on GPS Operations
 MP Rugged Wireless Modem Primer on GPS Operations 2130313 Rev 1.0 Cover illustration by Emma Jantz-Lee (age 11). An Introduction to GPS This primer is intended to provide the foundation for understanding
MP Rugged Wireless Modem Primer on GPS Operations 2130313 Rev 1.0 Cover illustration by Emma Jantz-Lee (age 11). An Introduction to GPS This primer is intended to provide the foundation for understanding
NovAtel s. Performance Analysis October Abstract. SPAN on OEM6. SPAN on OEM6. Enhancements
 NovAtel s SPAN on OEM6 Performance Analysis October 2012 Abstract SPAN, NovAtel s GNSS/INS solution, is now available on the OEM6 receiver platform. In addition to rapid GNSS signal reacquisition performance,
NovAtel s SPAN on OEM6 Performance Analysis October 2012 Abstract SPAN, NovAtel s GNSS/INS solution, is now available on the OEM6 receiver platform. In addition to rapid GNSS signal reacquisition performance,
Inertial Systems. Ekinox 2 Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox 2 Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.02 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX 2 SERIES R&D specialists usually compromise between
Ekinox 2 Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.02 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX 2 SERIES R&D specialists usually compromise between
High Performance Advanced MEMS Industrial & Tactical Grade Inertial Measurement Units
 High Performance Advanced MEMS Industrial & Tactical Grade Inertial Measurement Units ITAR-free Small size, low weight, low cost 1 deg/hr Gyro Bias in-run stability Datasheet Rev.2.0 5 μg Accelerometers
High Performance Advanced MEMS Industrial & Tactical Grade Inertial Measurement Units ITAR-free Small size, low weight, low cost 1 deg/hr Gyro Bias in-run stability Datasheet Rev.2.0 5 μg Accelerometers
Inertial Systems. Ekinox 2 Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox 2 Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.02 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX 2 SERIES R&D specialists usually compromise between
Ekinox 2 Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.02 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX 2 SERIES R&D specialists usually compromise between
Robust Positioning Provision of Safe Navigation at Sea. Next Generation Forum Köln, Oktober Daniel Arias Medina
 Robust Positioning Provision of Safe Navigation at Sea Next Generation Forum Köln, 26.-27. Oktober 2016 Daniel Arias Medina Department of Nautical Systems Institute of Communication and Navigation DLR.de
Robust Positioning Provision of Safe Navigation at Sea Next Generation Forum Köln, 26.-27. Oktober 2016 Daniel Arias Medina Department of Nautical Systems Institute of Communication and Navigation DLR.de
COST Action: TU1302 Action Title: Satellite Positioning Performance Assessment for Road Transport SaPPART. STSM Scientific Report
 COST Action: TU1302 Action Title: Satellite Positioning Performance Assessment for Road Transport SaPPART STSM Scientific Report Assessing the performances of Hybrid positioning system COST STSM Reference
COST Action: TU1302 Action Title: Satellite Positioning Performance Assessment for Road Transport SaPPART STSM Scientific Report Assessing the performances of Hybrid positioning system COST STSM Reference
Improved Pedestrian Navigation Based on Drift-Reduced NavChip MEMS IMU
 Improved Pedestrian Navigation Based on Drift-Reduced NavChip MEMS IMU Eric Foxlin Aug. 3, 2009 WPI Workshop on Precision Indoor Personnel Location and Tracking for Emergency Responders Outline Summary
Improved Pedestrian Navigation Based on Drift-Reduced NavChip MEMS IMU Eric Foxlin Aug. 3, 2009 WPI Workshop on Precision Indoor Personnel Location and Tracking for Emergency Responders Outline Summary
Robust Positioning for Urban Traffic
 Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity
 Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity Zak M. Kassas Autonomous Systems Perception, Intelligence, and Navigation (ASPIN) Laboratory University of California, Riverside
Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity Zak M. Kassas Autonomous Systems Perception, Intelligence, and Navigation (ASPIN) Laboratory University of California, Riverside
SPAN Technology System Characteristics and Performance
 SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
Open Access Research on Navigation and Positioning Technology of Intelligent Vehicle Based on GNSS/INS Integrated Navigation System
 Send Orders for Reprints to reprints@benthamscience.ae The Open Automation and Control Systems Journal, 2014, 6, 1555-1562 1555 Open Access Research on Navigation and Positioning Technology of Intelligent
Send Orders for Reprints to reprints@benthamscience.ae The Open Automation and Control Systems Journal, 2014, 6, 1555-1562 1555 Open Access Research on Navigation and Positioning Technology of Intelligent
Acoustic INS aiding NASNet & PHINS
 NAUTRONIX MARINE TECHNOLOGY SOLUTIONS Acoustic INS aiding NASNet & PHINS Sam Hanton Aberdeen Houston Rio Positioning Options Satellites GPS, GLONASS, COMPASS Acoustics LBL, SBL, USBL Relative sensors Laser
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS Acoustic INS aiding NASNet & PHINS Sam Hanton Aberdeen Houston Rio Positioning Options Satellites GPS, GLONASS, COMPASS Acoustics LBL, SBL, USBL Relative sensors Laser
Tightly Coupled Low Cost 3D RISS/GPS Integration Using a Mixture Particle Filter for Vehicular Navigation
 Sensors 2011, 11, 4244-4276; doi:10.3390/s110404244 OPEN ACCESS sensors ISSN 1424-8220 www.mdpi.com/journal/sensors Article Tightly Coupled Low Cost 3D RISS/GPS Integration Using a Mixture Particle Filter
Sensors 2011, 11, 4244-4276; doi:10.3390/s110404244 OPEN ACCESS sensors ISSN 1424-8220 www.mdpi.com/journal/sensors Article Tightly Coupled Low Cost 3D RISS/GPS Integration Using a Mixture Particle Filter
TACOT Project. Trusted multi Application receiver for Trucks. Bordeaux, 4 June 2014
 TACOT Project Trusted multi Application receiver for Trucks Bordeaux, 4 June 2014 Agenda TACOT Context & Solution Technical developments Test & Validation results Conclusions GNSS ease our lives GNSS is
TACOT Project Trusted multi Application receiver for Trucks Bordeaux, 4 June 2014 Agenda TACOT Context & Solution Technical developments Test & Validation results Conclusions GNSS ease our lives GNSS is
Utilizing A GNSS Network Solution for Utility Applications
 Utilizing A GNSS Network Solution for Utility Applications David Newcomer, PE, PLS GPServ, Inc. newcomer@ (407) 601-5816 AGENDA Types and accuracies of data collection o Autonomous o Meter + o Sub-meter
Utilizing A GNSS Network Solution for Utility Applications David Newcomer, PE, PLS GPServ, Inc. newcomer@ (407) 601-5816 AGENDA Types and accuracies of data collection o Autonomous o Meter + o Sub-meter
OS3D-FG MINIATURE ATTITUDE & HEADING REFERENCE SYSTEM MINIATURE 3D ORIENTATION SENSOR OS3D-P. Datasheet Rev OS3D-FG Datasheet rev. 2.
 OS3D-FG OS3D-FG MINIATURE ATTITUDE & HEADING REFERENCE SYSTEM MINIATURE 3D ORIENTATION SENSOR OS3D-P Datasheet Rev. 2.0 1 The Inertial Labs OS3D-FG is a multi-purpose miniature 3D orientation sensor Attitude
OS3D-FG OS3D-FG MINIATURE ATTITUDE & HEADING REFERENCE SYSTEM MINIATURE 3D ORIENTATION SENSOR OS3D-P Datasheet Rev. 2.0 1 The Inertial Labs OS3D-FG is a multi-purpose miniature 3D orientation sensor Attitude
GPS data correction using encoders and INS sensors
 GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
Implementation and Performance Evaluation of a Fast Relocation Method in a GPS/SINS/CSAC Integrated Navigation System Hardware Prototype
 This article has been accepted and published on J-STAGE in advance of copyediting. Content is final as presented. Implementation and Performance Evaluation of a Fast Relocation Method in a GPS/SINS/CSAC
This article has been accepted and published on J-STAGE in advance of copyediting. Content is final as presented. Implementation and Performance Evaluation of a Fast Relocation Method in a GPS/SINS/CSAC
The Global Positioning System
 The Global Positioning System 5-1 US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites
The Global Positioning System 5-1 US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites
This is an author-deposited version published in: Eprints ID: 11765
 Open Archive Toulouse Archive Ouverte (OATAO) OATAO is an open access repository that collects the work of Toulouse researchers and makes it freely available over the web where possible. This is an author-deposited
Open Archive Toulouse Archive Ouverte (OATAO) OATAO is an open access repository that collects the work of Toulouse researchers and makes it freely available over the web where possible. This is an author-deposited
Sensor Fusion for Navigation in Degraded Environements
 Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
Effect of Quasi Zenith Satellite (QZS) on GPS Positioning
 on GPS Positioning") Effect of Quasi Zenith Satellite (QZS) on GPS ing Tomoji Takasu 1, Takuji Ebinuma 2, and Akio Yasuda 3 Laboratory of Satellite Navigation, Tokyo University of Marine Science and Technology 1 (Tel: +81-5245-7365,
Effect of Quasi Zenith Satellite (QZS) on GPS ing Tomoji Takasu 1, Takuji Ebinuma 2, and Akio Yasuda 3 Laboratory of Satellite Navigation, Tokyo University of Marine Science and Technology 1 (Tel: +81-5245-7365,
Lätt tillgängliga sensorer ger oändliga möjligheter
 REGLERTEKNIK AUTOMATIC CONTROL Lätt tillgängliga sensorer ger oändliga möjligheter Position and orientation estimation using inertial sensors Manon Kok Automatic Control, Linköping University, Sweden April
REGLERTEKNIK AUTOMATIC CONTROL Lätt tillgängliga sensorer ger oändliga möjligheter Position and orientation estimation using inertial sensors Manon Kok Automatic Control, Linköping University, Sweden April
GPS Milestones, cont. GPS Milestones. The Global Positioning Sytem, Part 1 10/10/2017. M. Helper, GEO 327G/386G, UT Austin 1. US GPS Facts of Note
 The Global Positioning System US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites (SVs)
The Global Positioning System US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites (SVs)
Accuracy Performance Test Methodology for Satellite Locators on Board of Trains Developments and results from the EU Project APOLO
 ID No: 459 Accuracy Performance Test Methodology for Satellite Locators on Board of Trains Developments and results from the EU Project APOLO Author: Dipl. Ing. G.Barbu, Project Manager European Rail Research
ID No: 459 Accuracy Performance Test Methodology for Satellite Locators on Board of Trains Developments and results from the EU Project APOLO Author: Dipl. Ing. G.Barbu, Project Manager European Rail Research
Integration of Inertial Measurements with GNSS -NovAtel SPAN Architecture-
 Integration of Inertial Measurements with GNSS -NovAtel SPAN Architecture- Sandy Kennedy, Jason Hamilton NovAtel Inc., Canada Edgar v. Hinueber imar GmbH, Germany ABSTRACT As a GNSS system manufacturer,
Integration of Inertial Measurements with GNSS -NovAtel SPAN Architecture- Sandy Kennedy, Jason Hamilton NovAtel Inc., Canada Edgar v. Hinueber imar GmbH, Germany ABSTRACT As a GNSS system manufacturer,
Hardware-free Indoor Navigation for Smartphones
 Hardware-free Indoor Navigation for Smartphones 1 Navigation product line 1996-2015 1996 1998 RTK OTF solution with accuracy 1 cm 8-channel software GPS receiver 2004 2007 Program prototype of Super-sensitive
Hardware-free Indoor Navigation for Smartphones 1 Navigation product line 1996-2015 1996 1998 RTK OTF solution with accuracy 1 cm 8-channel software GPS receiver 2004 2007 Program prototype of Super-sensitive
TACTICAL SERIES VECTORNAV INDUSTRIAL SERIES. Key Benefits Miniaturized surface mount & Rugged packaging. < 30 grams. Embedded Navigation Solutions
 TACTICAL SERIES VECTORNAV INDUSTRIAL SERIES VN100 IMU/AH AHRS VN200 GPS/INS VN300 DUAL GNSS/INS Key Benefits Miniaturized surface mount & Rugged packaging < 30 grams Embedded Navigation Solutions THE INDUSTRIAL
TACTICAL SERIES VECTORNAV INDUSTRIAL SERIES VN100 IMU/AH AHRS VN200 GPS/INS VN300 DUAL GNSS/INS Key Benefits Miniaturized surface mount & Rugged packaging < 30 grams Embedded Navigation Solutions THE INDUSTRIAL
Pedestrian Navigation System Using. Shoe-mounted INS. By Yan Li. A thesis submitted for the degree of Master of Engineering (Research)
") Pedestrian Navigation System Using Shoe-mounted INS By Yan Li A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information Technology University of Technology,
Pedestrian Navigation System Using Shoe-mounted INS By Yan Li A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information Technology University of Technology,
Title: ASSESSMENT OF USEFULNESS OF THE MEMS-BASED INTEGRATED NAVIGATION UNIT IN CAR NAVIGATION
 ACCEPTED MANUSCRIPT Title: ASSESSMENT OF USEFULNESS OF THE MEMS-BASED INTEGRATED NAVIGATION UNIT IN CAR NAVIGATION Authors: Marcin Uradziński, Jacek Rapiński, Dariusz Tomaszewski, Michał Śmieja, Hang Guo,
ACCEPTED MANUSCRIPT Title: ASSESSMENT OF USEFULNESS OF THE MEMS-BASED INTEGRATED NAVIGATION UNIT IN CAR NAVIGATION Authors: Marcin Uradziński, Jacek Rapiński, Dariusz Tomaszewski, Michał Śmieja, Hang Guo,
3DM-GX3-45 Theory of Operation
 Theory of Operation 8500-0016 Revision 001 3DM-GX3-45 Theory of Operation www.microstrain.com Little Sensors, Big Ideas 2012 by MicroStrain, Inc. 459 Hurricane Lane Williston, VT 05495 United States of
Theory of Operation 8500-0016 Revision 001 3DM-GX3-45 Theory of Operation www.microstrain.com Little Sensors, Big Ideas 2012 by MicroStrain, Inc. 459 Hurricane Lane Williston, VT 05495 United States of
On the Road to Driverless. Personal cars and commercial trucks are. Differential GNSS+INS for Land Vehicle Autonomous Navigation Qualification
 » COVER STORY MERCEDES vision of future mobility, autonomous driving. On the Road to Driverless Differential GNSS+INS for Land Vehicle Autonomous Navigation Qualification Land-vehicle autonomous navigation
» COVER STORY MERCEDES vision of future mobility, autonomous driving. On the Road to Driverless Differential GNSS+INS for Land Vehicle Autonomous Navigation Qualification Land-vehicle autonomous navigation
ADMA. Automotive Dynamic Motion Analyzer with 1000 Hz. ADMA Applications. State of the art: ADMA GPS/Inertial System for vehicle dynamics testing
 ADMA Automotive Dynamic Motion Analyzer with 1000 Hz State of the art: ADMA GPS/Inertial System for vehicle dynamics testing ADMA Applications The strap-down technology ensures that the ADMA is stable
ADMA Automotive Dynamic Motion Analyzer with 1000 Hz State of the art: ADMA GPS/Inertial System for vehicle dynamics testing ADMA Applications The strap-down technology ensures that the ADMA is stable
SPAN Tightly Coupled GNSS+INS Technology Performance for Exceptional 3D, Continuous Position, Velocity & Attitude
 SPAN Tightly Coupled GNSSINS Technology Performance for Exceptional 3D, Continuous Position, Velocity & Attitude SPAN Technology NOVATEL S SPAN TECHNOLOGY PROVIDES CONTINUOUS 3D POSITIONING, VELOCITY AND
SPAN Tightly Coupled GNSSINS Technology Performance for Exceptional 3D, Continuous Position, Velocity & Attitude SPAN Technology NOVATEL S SPAN TECHNOLOGY PROVIDES CONTINUOUS 3D POSITIONING, VELOCITY AND
Integrating SAASM GPS and Inertial Navigation: What to Know
 Integrating SAASM GPS and Inertial Navigation: What to Know At any moment, a mission could be threatened with potentially severe consequences because of jamming and spoofing aimed at global navigation
Integrating SAASM GPS and Inertial Navigation: What to Know At any moment, a mission could be threatened with potentially severe consequences because of jamming and spoofing aimed at global navigation
Integrated Positioning The Challenges New technology More GNSS satellites New applications Seamless indoor-outdoor More GNSS signals personal navigati
 Integrated Indoor Positioning and Navigation Professor Terry Moore Professor of Satellite Navigation Nottingham Geospatial Institute The University of Nottingham Integrated Positioning The Challenges New
Integrated Indoor Positioning and Navigation Professor Terry Moore Professor of Satellite Navigation Nottingham Geospatial Institute The University of Nottingham Integrated Positioning The Challenges New
Near-Field Electromagnetic Ranging (NFER) Indoor Location
 Indoor Location") Near-Field Electromagnetic Ranging (NFER) Indoor Location 21 st Test Instrumentation Workshop Thursday May 11, 2017 Hans G. Schantz h.schantz@q-track.com Q-Track Corporation Sheila Jones sheila.jones@navy.mil
Near-Field Electromagnetic Ranging (NFER) Indoor Location 21 st Test Instrumentation Workshop Thursday May 11, 2017 Hans G. Schantz h.schantz@q-track.com Q-Track Corporation Sheila Jones sheila.jones@navy.mil
Addressing Issues with GPS Data Accuracy and Position Update Rate for Field Traffic Studies
 Addressing Issues with GPS Data Accuracy and Position Update Rate for Field Traffic Studies THIS FEATURE VALIDATES INTRODUCTION Global positioning system (GPS) technologies have provided promising tools
Addressing Issues with GPS Data Accuracy and Position Update Rate for Field Traffic Studies THIS FEATURE VALIDATES INTRODUCTION Global positioning system (GPS) technologies have provided promising tools
Motion & Navigation Solution
 Navsight Land & Air Solution Motion & Navigation Solution FOR SURVEYING APPLICATIONS Motion, Navigation, and Geo-referencing NAVSIGHT LAND/AIR SOLUTION is a full high performance inertial navigation solution
Navsight Land & Air Solution Motion & Navigation Solution FOR SURVEYING APPLICATIONS Motion, Navigation, and Geo-referencing NAVSIGHT LAND/AIR SOLUTION is a full high performance inertial navigation solution
and Vehicle Sensors in Urban Environment
 AvailabilityImprovement ofrtk GPS GPSwithIMU and Vehicle Sensors in Urban Environment ION GPS/GNSS 2012 Tk Tokyo University it of Marine Si Science and Technology Nobuaki Kubo, Chen Dihan 1 Contents Background
AvailabilityImprovement ofrtk GPS GPSwithIMU and Vehicle Sensors in Urban Environment ION GPS/GNSS 2012 Tk Tokyo University it of Marine Si Science and Technology Nobuaki Kubo, Chen Dihan 1 Contents Background
3DM-GX4-45 LORD DATASHEET. GPS-Aided Inertial Navigation System (GPS/INS) Product Highlights. Features and Benefits. Applications
 Product Highlights. Features and Benefits. Applications") LORD DATASHEET 3DM-GX4-45 GPS-Aided Inertial Navigation System (GPS/INS) Product Highlights High performance integd GPS receiver and MEMS sensor technology provide direct and computed PVA outputs in a
LORD DATASHEET 3DM-GX4-45 GPS-Aided Inertial Navigation System (GPS/INS) Product Highlights High performance integd GPS receiver and MEMS sensor technology provide direct and computed PVA outputs in a
Systematical Methods to Counter Drones in Controlled Manners
 Systematical Methods to Counter Drones in Controlled Manners Wenxin Chen, Garrett Johnson, Yingfei Dong Dept. of Electrical Engineering University of Hawaii 1 System Models u Physical system y Controller
Systematical Methods to Counter Drones in Controlled Manners Wenxin Chen, Garrett Johnson, Yingfei Dong Dept. of Electrical Engineering University of Hawaii 1 System Models u Physical system y Controller