Encoderless & Predictive Control of Synchronous Machines
|
|
|
- Kelly Reed
- 6 years ago
- Views:
Transcription
1 Encoderless & Predictive Control of Synchronous Machines Ralph M. Kennel, Technische Universitaet Muenchen, Germany EMAD E M A D lectrical achines nd rives Laboratories Wuppertal University Germany

2
3


4 Museums District



5 Institute for Electrical Drive Systems & Power Electronics Prof. Dr.-Ing. Ralph Kennel
6 Prof. Dr.-Ing. Ralph M. Kennel 1984 Ph.D. at University of Kaiserslautern, Germany Development of Industrial Servo Drives with Digital Control, Robert BOSCH GmbH, Erbach/Odw., Germany Advanced Development of Electrical Drives for Automotive Applications Robert BOSCH GmbH, Buehlertal, Germany Visiting Professor at the University of Newcastle upon Tyne, UK Professor for Electrical Machines & Drives at Wuppertal University, Germany since 2008 Professor for Electrical Drive Systems & Power Electronics at Technische Universität München, Germany
7 Main Research Areas 1. Dynamic Drives for Industrial Applications 2. Drive Control (progressive concepts) 3. Hardware-in-the-Loop Systems
8 Dynamic Drives for Industrial Applications Sensorless Control for Synchronous and Asynchronous Machines this is our main topic #1 Position Feld Position.. Laufer.. Trager Asynchron maschine? Position Feld Position.. Laufer Ultra High Speed Drives (finished)
9 Drive Control Predictive Control of Inverters and Drives this is our main topic #2 Optimal PWM Adaptive Control of Mechatronic Systems reference commands precalculation of the behaviour for each of the switching states definite number of equivalent circuits without switching elements definite number of switching states comparison between precalculation and reference commands definite number of switching elements next switching state or switching time can be fixed inverter
10 Hardware-in-the-Loop Systems High Power Current Source Inverters (finished) Multilevel Inverters Serial Connection of Inverter Switches (e.g. IGCTs) Driving High Power IGBTs with Shaped Gate Voltages and Currents this is our main topic #3 Virtual Machine virtual machine
11 Encoderless & Predictive Control of Synchronous Machines Ralph M. Kennel, Technische Universitaet Muenchen, Germany Page 11
12 Reasons for Industrial Applications of Drives with encoderless Control: Cost???? Reliability Robustness is encoderless (sensorless) resulting in additional cost??? Page 12
13 Industrial Drives with Sensorless Control since several years / decades sensorless control is investigated and published on conferences and magazines - acceptance in industry, however, is rather low Why? new ideas and concepts are interesting for industry, only if they do not result in higher cost or higher effort!!! What does that mean for industrial drives with sensorless control? no additional or more powerful processors / controllers no additional hardware or additional sensors (e. g. voltage this sensors) was valid no increased installation effort with respect to parameter from adjustments 2000 to 2010 Page 13
14 Industrial Drives with Sensorless Control since several years / decades sensorless control is investigated and published on conferences and magazines - acceptance in industry, however, is rather low Why? new ideas and concepts are interesting for industry, only if they do not result in higher cost or higher effort!!! What does that mean for industrial drives with sensorless control? single scheme for wide speed range (no phase over) no additional noise (except usual noise by inverter supply) insensitivity with respect to parameter variations What does industry think today? Page 14
15 Industrial Drives with Sensorless Control Actual Requirements from Industry there should be a single concept for encoderless control for the complete speed range (from standstill to maximum speed) single scheme for wide speed range (no phase over) in case there is a signal to be injected for speed/position detection no additional noise this should not cause any additional noise - except usual noise caused by inverter supply with standard PWM parameters of electrical machine and/or power elctronics should not impact the performance of encoderless control too much (a certain impact is acceptable) insensitivity with respect to parameter variations Page 15
16 Sensorless (Encoderless) & Predictive Control encoderless control of synchronous machines fundamental model methods high frequency injection methods tracking of magnetic saliencies / anisotropies predictive control of power electronics basic principles Model Predictive Control (MPC) encoderless predictive control of synchronous machines idea performance and potential practical results conclusions Page 16
17 Field oriented control of PMSM rotor position needed Page 17
18 Sensorless (Encoderless) & Predictive Control encoderless control of synchronous machines fundamental model methods high frequency injection methods tracking of magnetic saliencies / anisotropies predictive control of power electronics basic principles Model Predictive Control (MPC) encoderless predictive control of synchronous machines idea performance and potential practical results conclusions Page 18
19 Fundamental model based position estimation when knowing voltage (by reference values) as well as current (by real values) it is possible to estimate rotor speed and rotor position Page 19
20 Calculation of Speed by Fundamental Model is not Practicable for Very Low Speeds... because the voltage signal becomes very small errors between real voltage and values used for calculation cannot be avoided and become more significant DC components of these errors let the integrators for flux calculation drift away the calculated speed gets more and more incorrect is an encoder/resolver the only feasable solution?? Page 20
21 Sensorless (Encoderless) & Predictive Control encoderless control of synchronous machines fundamental model methods high frequency injection methods tracking of magnetic saliencies / anisotropies predictive control of power electronics basic principles Model Predictive Control (MPC) encoderless predictive control of synchronous machines idea performance and potential practical results conclusions Page 21
22 fundamental model high frequency injection simple realisation does not work at frequency 0 parameter dependencies current injection voltage injection measuring voltage is high enough additional voltage sensors transient current response Basic Principles of Encoderless Control no additional hardware very short measuring time stationary current response standard microcontroller sufficient very small measuring current Page 22
 0 π 2π γ Stator u e Rotor u R Stator u 2 R2 S1 Stator u 1 S3 S4 u 2 (γ) 0 π 2π γ Page")
23 Resolver injection of a stationary (sinusoidal) high frequency signal sensing of a two-dimensional stationary (sinusoidal) signal response Tamagawa R1 S2 u 1 (γ) 0 π 2π γ Stator u e Rotor u R Stator u 2 R2 S1 Stator u 1 S3 S4 u 2 (γ) 0 π 2π γ Page 23
24 Stationary Signal Injection Method according to R. Lorenz, S.-K. Sul, R. Kennel, etc. the basic idea is to use the electrical machine itself as a resolver!!! a resolver is nothing else but an electrical machine can we operate the motor itself like a resolver? if the machine itself is a resolver (encoder) is that really an encoderless control??? now we do the same with an electrical AC machine Page 24
25 Standard industrial servo PMSM distributed stator windings surface mounted PM Page 25
26 Fundamental Frequency Excitation (in α-β coordinates) Page 26
27 High Frequency Excitation (in α-β coordinates) Page 27
28 injection of high frequency voltages fundamental voltage phasor/vector fundamental current phasor/vector injected high frequency voltage phasor/vector high frequency current phasor/vector (response) Page 28
29 injection of high frequency voltages fundamental voltage phasor/vector fundamental current phasor/vector injected high frequency voltage phasor/vector high frequency current phasor/vector (response) Page 29
30 injection of high frequency voltages fundamental voltage phasor/vector fundamental current phasor/vector injected high frequency voltage phasor/vector high frequency current phasor/vector (response) Page 30
31 injection of high frequency voltages fundamental voltage phasor/vector fundamental current phasor/vector injected high frequency voltage phasor/vector high frequency current phasor/vector (response) Page 31

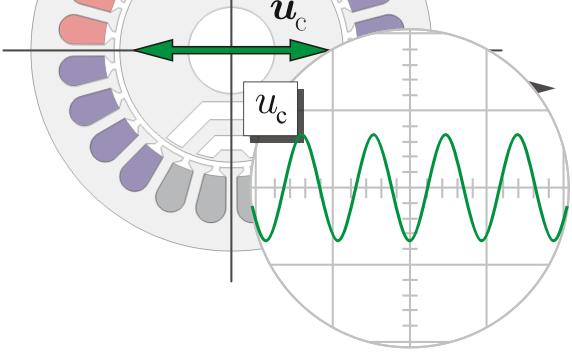
32 Injection of High Frequency Rotating Phasors rotating voltage phasor u c elliptic current response i c Page 32
")
33 Position Information of Salient Rotors in High Frequency Rotating Phasors machine responds on a rotating voltage phasor with an elliptic current response ellipse is correlated with the geometric anisotropy rotor position information is included of the rotor in the high frequency current elliptic current response i c (rotating) Page 33
")
")

 field no")
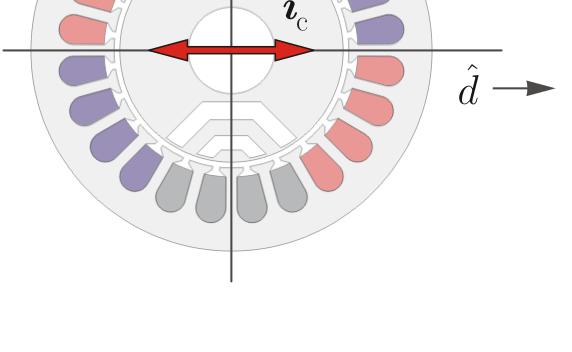
34 Injection of High Frequency Alternating (Pulsating) Voltage Phasors composing an alternating (pulsating) voltage phasor by two phasors rotating in opposite direction advantage : no rotational (HF) field no additional torque Page 34


35 High Frequency Current Response of a Synchronous Machine Page 35
36 Current Response of a Misoriented System voltage and current show different orientation!! Page 36
37 Page 37
38 Page 38
39 Page 39
40 Page 40
41 Page 41
42 Sensorless (Encoderless) & Predictive Control encoderless control of synchronous machines fundamental model methods high frequency injection methods tracking of magnetic saliencies / anisotropies predictive control of power electronics basic principles Model Predictive Control (MPC) encoderless predictive control of synchronous machines idea performance and potential practical results conclusions Page 42
 l cq i (Fˆ) cq ( ωct)( lcq cd ) ˆ δa = K sin l Page 43")
43 Tracking Scheme for Magnetic Anisotropies i (Fˆ) cd = K sin ( ω c t) l cq i (Fˆ) cq ( ωct)( lcq cd ) ˆ δa = K sin l Page 43


44 Tracking Scheme for Magnetic Anisotropies Tracking the estimated angle of the rotor flux by controlling i cq to 0 Page 44

45 Encoderless Control Structure step response of the PLL; PLL is locked after ca ms Page 45



46 Encoderless Control Structure control structure of an encoderless control with alternating high frequency signal injection the estimated angle can be used for field orientation as well as for speed or position control of synchronous machines Page 46


47 Sprungantwort der Drehzahlregelung Drive with Speed Control Page 47


48 Sprungantwort der Lageregelung Step Response of Encoderless Position Control Page 48
49 Results the tracking control scheme presented here synchronizes on the saturation anisotropy of a synchronous machine. the tracking control scheme is not depending on any machine parameter. the size of additional software for the tracking control is comparable to the software of a rotor model for the field oriented control of an induction machine. the high frequency current signal can be measured together with the fundamental current by the standard current transducers of a standard drive inverter. Page 49

50 Practical Experience with an Industrial Servo Drive Implementation of a sensorless control into a servo drive of training of a development engineer 2 x 1 week in our laboratory programming of additional software in manufacturer s factory delivery of prototype after ca. 3 months presentation on Hanover Fair in April 2006 Page 50
51 meanwhile : more industrial applications WEG (Brazil) as mentioned before BAUMÜLLER same experiences as WEG TRÜTZSCHLER successful application in textile machinery YASKAWA successful implementation in one product two more companies who do not want to be mentioned ABM Greiffenberger advertising actively on SPS/IPC/Drives 2010 Page 51
52 some more experiences Bolognani reported (in 2006?) saturation in q direction increases under load difference between l cq and l cd decreases... and vanishes at a certain load (armature reaction) an encoderless tracking of the anisotropy does not work any more this effect appears around 2 to 3 times rated load with IPM motors around 5 to 6 times rated load with SMPM motors Page 52
53 Accuracy of the Rotor Position Identification under Load Conditions a) without load b) rated load (carrier frequency f c = 2 khz) why is the armature reaction so small??? Page 53
 do not allow a load depending displacement")
54 Accuracy of the Rotor Position Identification under Load Conditions... because the usual rotor designs of servo motors (mechanical holes for inertia reduction) do not allow a load depending displacement of the main field why is the armature reaction so small??? Page 54
55 Sensorless (Encoderless) & Predictive Control encoderless control of synchronous machines fundamental model methods high frequency injection methods tracking of magnetic saliencies / anisotropies predictive control of power electronics basic principles Model Predictive Control (MPC) encoderless predictive control of synchronous machines idea performance and potential practical results conclusions Page 55
56 Typical Cascaded Structure of Drive Control ϕ position controller speed controller current controller power motor inertia gear etc. electronics windings I ω ϕ Page 56
57 Problems of Linear Algorithms in cascaded control structures speed control must be much faster than position control and current control must be much faster than speed control current control must be very fast to achieve position control with reasonable cycle times in the controlled system (drive, converter, ) however, there is no time constant justifying cycle times of 100 µs or less Page 57
58 General Structure of a Predictive Controller ϕ prediction and calculation switching state actual machine state power electronics machine and power electronics model motor windings I inertia ω gear etc. ϕ reminds slightly to state control state control, however, is basically a linear control predictive control is not!!! Page 58
59 Usual Structure of Drive Control why PWM? linearization of the inverter consequences? very high switching frequency DC link PI controller Page 59

60 Structure of a Direct Control DC link direct controller Page 60
61 Principle of Predictive Control reference commands precalculation of the behaviour for each of the switching states comparison between precalculation and reference commands next switching state or switching time can be fixed definite number of equivalent circuits without switching elements definite number of switching states definite number of switching elements inverter Page 61
62 Trajectory Based Predictive Control Strategies system states are forced to follow (pre-)defined natural reference trajectories difference to sliding mode control there the trajectories are not natural Page 62
63 Example : Trajectory Based Predictive Control Direct Speed Control acc. to Mutschler ω * ω e model and prediction u k u d ω i s u s i = ~ u e / a k+1 k+1 S k S k+1 S k Hy e / a k+3 k+3 a = ω +Hy ω M 3~ e / a k k S k+2 e / a k+2 k+2 e = ω ω ref Page 63
64 Characteristics of Trajectory Based Predictive Control system states are forced to follow (pre-)defined reference trajectories switching takes place at intersections between different system-trajectories or at (pre-)defined instants switching frequency of the inverter can be fixed to a constant value control behaviour comparable to feedforward control exact knowledge of system parameters is required appropriate for realisation by digital circuits or controllers Page 64
65 Example : Trajectory Based Predictive Control Direct Self Control (DSC) acc. to Depenbrock Page 65
66 Hysteresis Based Predictive Control Strategies switching of inverter takes place at the (multi-dimensional) border(s) of a hysteresis area Page 66
67 Example : Hysteresis Based Predictive Control Predictive Current Control acc. to Holtz Page 67
68 Example : Hysteresis Based Predictive Control Predictive Current Control acc. to Holtz Page 68
69 Example : Hysteresis Based Predictive Control Predictive Current Control acc. to Holtz i s * i s i s u sk predict model u k di sk dt = ~ u d u s jim ω s * i s di n dt i s ω M 3~ 0 i s Re Page 69
70 Example : Hysteresis Based Predictive Control Predictive Current Control acc. to Holtz Page 70
71 Page 71
72 Characteristics of Hysteresis Based Predictive Control switching takes place at borders of a hysteresis area a maximum error can be (pre-)defined switching frequency of the inverter is not constant control behaviour comparable to feedback control exact knowledge of system parameters is not required appropriate for realisation by analog circuits Page 72
73 Sensorless (Encoderless) & Predictive Control encoderless control of synchronous machines fundamental model methods high frequency injection methods tracking of magnetic saliencies / anisotropies predictive control of power electronics basic principles Model Predictive Control (MPC) encoderless predictive control of synchronous machines idea performance and potential practical results conclusions Page 73
74 The Human Behaviour of DMPC DMPC is like playing chess the player calculates in advance all possible moves until a prediction horizon the player chooses the move with the best expectations of success after each opponent s move pre-calculation and optimization is repeated Page 74

75 Predictive Control History Future Page 75
76 Predictive Control Overview Page 76


77 Direct Model Predictive Control System Model / Cost Function Page 77

78 Direct Model Predictive Control System Model / Cost Function Page 78
79 Characteristics of Model Based Predictive Control basic ideas are derived from state-space control the past is explicitely considered (mostly by the system state) future control values are pre-calculated and optimized the first of the precalculated control values only model parameters can be estimated on-line until a (pre-)defined horizon is transmitted to the controlled system extension to MIMO-control is possible with little additional effort use of non-linear model is possible for non-linear control systems a lot of calculation power is required Page 79
80 Model Based Predictive Current Control complete enumeration extensive processing power needed there are 7 (or 8) possiblities for the following switching state the respective system behaviour (current) can be calculated in advance a chess player, so why however, should we does not that really in predictive consider control each possibility???
81 Model Based Predictive Current Control further prediction, however, is only considered for the candidate sequences staying within the permitted limits so why should we do that in predictive control???
82 Model Based Predictive Current Control determine those switching possibilities only that are either feasible or point in the proper direction these are candidate sequences feasible pointing in the proper direction
83 Model Based Predictive Current Control determine those switching possibilities only that are either feasible or point in the proper direction these are candidate sequences not feasible not pointing in the proper direction
84 Model Based Predictive Current Control for the candidate sequences, further prediction (e. g. by a reduced system model) is performed example : the number of steps after which the first of the two variables the i sα and i isβ leaves the feasible region is the number η
85 Model Based Predictive Current Control for the candidate sequences, further prediction (e. g. by a reduced system model) is performed example : the number of steps after which the first of the two variables the i sα and i isβ leaves the feasible region is the number η 1 η1 = 4 η 1 = 4
 is performed example : the number of steps after which the first of the two variables the i sα and i isβ leaves the")
86 Model Based Predictive Current Control for the candidate sequences, further prediction (e. g. by a reduced system model) is performed example : the number of steps after which the first of the two variables the i sα and i isβ leaves the feasible region 1 η1 = 4 is the number η 2 η2 = 10
87 Different Way of Thinking in Model Based Predictive Control 1. model of the controlled system this is no difference to conventional control the better the model, the better the prediction 2. cost function the engineer has to learn to describe what he wants the controlled system really to do!!! 3. stability that s a really good question next question? Page 87
88 Experimental Results (DMPC) current control comparison : PI control model predictive control Page 88

 frequency dynamic of step response results in is")
89 Experimental Results (DMPC) current control Low a change switching of the frequency cost function (nothing high switching else!!!) frequency dynamic of step response results in is different identical behaviour!! Page 89
90 Advantages Features of (Longe Range) Predictive Control possibility to use foreknowledge about drive system (system model) inverter limitations and dynamic behaviours are taken into account improved representation of non-linear systems no need for time challenging cascade structure improved dynamic behaviour Disadvantages high processing capability required for industrial use change in teaching engineers necessary stationary accuracy and dynamic behaviour depend on accurracy of model parameters Page 90
91 Actual Situation in cascaded control structures speed control must be much faster than position control and current control must be much faster than speed control current control must be extremely fast to achieve position control with reasonable cycle times at the time most requirements in industrial applications are satisfied sufficiently there is no strong need for improvement in industry however at a certain time there will be a demand for improvement with respect to a future increase of requirements more investigations should be done Page 91
92 Discussion predictive control strategies offer the possibility to use foreknowledge about the drive system physical limitations and dynamic behaviour of power electronics non-linear systems are represented better (by non-linear models) no need for time challenging cascaded structures the way of thinking is different are taken into account model of the controlled system cost function with respect to a future increase of requirements more investigations should be done Page 92
93 Sensorless (Encoderless) & Predictive Control encoderless control of synchronous machines fundamental model methods high frequency injection methods tracking of magnetic saliencies / anisotropies predictive control of power electronics basic principles Model Predictive Control (MPC) encoderless predictive control of synchronous machines idea performance and potential practical results conclusions Page 93
94 Encoderless Control Basic Principle of High Frequency Injection Methods Goal : Detecting anisotropic magnetic characteristic of electrical machine Method : Detecting position dependant inductance of electrical machine Problem : Faraday s Law / Maxwell Equation No. 2 (f = 0) Solution : Injection of a high frequency signal (f 0) Comparison between ideal (= isotropic) complex current and real complex current (obtained by sensors) Difference Signal contains Position Information!
95 Basic Idea: A Predictive Torque Controller neglecting the saliency in the model causes a prediction error containing the angle information. Overview Predictive Torque Control Saliency Tracking Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
96 Encoderless Predictive Control Basic Principle Goal : Detecting anisotropic magnetic characteristic of electrical machine Method : Detecting position dependant inductance of electrical machine Problem : Faraday s Law / Maxwell Equation No. 2 (f = 0) Solution : Do not inject an additional high frequency signal!!! there is sufficient excitation (f 0) by the inverter anyway Comparison between ideal (= predicted) current (ideal model) and real current (obtained by sensors) Does Difference Signal contains Position Information?
97 (Conventional) Predictive Torque Control Basic Structure : Overview Predictive Torque Control Saliency Tracking controller input: reference torque actuating variable: stator voltage Simulation Results Measurements Conclusion current and rotor angle must be measured Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
98 (Conventional) Predictive Torque Control Current and PM flux linkage from measurements Overview Predictive Torque Control Saliency Tracking Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
99 (Conventional) Predictive Torque Control Current and PM flux linkage from measurements 7 voltages vectors from inverter Overview Predictive Torque Control Saliency Tracking Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
100 (Conventional) Predictive Torque Control Current and PM flux linkage from measurements 7 voltages vectors from inverter prediction of current and respective torque Overview Predictive Torque Control Saliency Tracking Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
101 (Conventional) Predictive Torque Control Current and PM flux linkage from measurements 7 voltages vectors from inverter prediction of current and respective torque Overview Predictive Torque Control Saliency Tracking Selecting optimum of cost function Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
102 (Conventional) Predictive Torque Control Overview Predictive Torque Control Saliency Tracking Simulation Results Discrete model of the machine Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
103 (Conventional) Predictive Torque Control Overview Predictive Torque Control Saliency Tracking Simulation Results Discrete model of the machine Measurements Current prediction based on mean inverse inductance (ideal model) Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
104 Saliency Tracking Approach Predicted current progression (ideal model) Overview Predictive Torque Control Saliency Tracking Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
105 Saliency Tracking Approach Predicted current progression (ideal model) Overview Predictive Torque Control Real current progression Saliency Tracking Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
106 Saliency Tracking Approach Predicted current progression (ideal model) Overview Predictive Torque Control Real current progression Saliency Tracking Prediction error Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
107 Saliency Tracking Approach Measured prediction error Overview unfortunately depends on switching state! Predictive Torque Control Saliency Tracking Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
108 Saliency Tracking Approach Measured prediction error Overview Reconstructed prediction error Predictive Torque Control Saliency Tracking has to be corrected by amplitude as well as angle! Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
109 Saliency Tracking Approach Measured prediction error Overview Reconstructed prediction error Predictive Torque Control Saliency Tracking PLL controller input Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
110 Saliency Tracking Approach Measured prediction error Overview Reconstructed prediction error Predictive Torque Control Saliency Tracking PLL controller input Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
111 Saliency Tracking Approach Measured prediction error Overview Reconstructed prediction error Predictive Torque Control Saliency Tracking PLL controller input Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
112 Saliency Tracking Approach Measured prediction error Overview Reconstructed prediction error Predictive Torque Control Saliency Tracking PLL controller input Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
113 Saliency Tracking Approach Measured prediction error Overview Reconstructed prediction error Predictive Torque Control Saliency Tracking PLL controller input Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
114 Saliency Tracking Approach Measured prediction error Overview Reconstructed prediction error Predictive Torque Control Saliency Tracking PLL controller input Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
115 Saliency Tracking Approach Saliency tracking scheme (STS) in drive software : Overview Predictive Torque Control Saliency Tracking Measured prediction error Reconstructed prediction error Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
116 Sensorless (Encoderless) & Predictive Control encoderless control of synchronous machines fundamental model methods high frequency injection methods tracking of magnetic saliencies / anisotropies predictive control of power electronics basic principles Model Predictive Control (MPC) encoderless predictive control of synchronous machines idea performance and potential practical results conclusions Page 116
117 Encoderless Predictive Control Performance as HF (high frequency) injection and encoderless predictive schemes use physically identical excitation (f 0) and search for identical magnetic anisotropies (L d L q ) the performance of both schemes is comparable to each other the problems with respect to strange machine designs are identical as well advantage of encoderless predictive scheme : no additional high frequency signal is injected is there some more potential?
118 Encoderless Predictive Control Potential Yes, there is!!! considering the strange machine designs in the ideal model leaves the position information in the difference signal again is there some more potential?
119 Sensorless (Encoderless) & Predictive Control encoderless control of synchronous machines fundamental model methods high frequency injection methods tracking of magnetic saliencies / anisotropies predictive control of power electronics basic principles Model Predictive Control (MPC) encoderless predictive control of synchronous machines idea performance and potential practical results conclusions Page 119
120 Simulation Results for PMSM Simulation parameter of PMSM Overview Predictive Torque Control Saliency Tracking Speed controlled encoderless predictive torque control Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
121 Simulation Results for PMSM Speed controlled step response to rated speed very good dynamics in simulation Overview Predictive Torque Control dependency on torque gradients Saliency Tracking Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de


122 Measurements with Reluctance Machine Data of transverse laminated RM Overview Predictive Torque Control Saliency Tracking Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
123 Measurements with Reluctance Machine Speed controlled step response to 160% rated speed Overview Predictive Torque Control Saliency Tracking Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
124 Measurements with Reluctance Machine Response to 66% rated torque load step at speed controlled standstill Overview Predictive Torque Control Saliency Tracking Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
125 Summary Proposed Scheme: Neglects the saliency in PTC equations Prediction error contains angle information Reconstruct Prediction Error using PLL angle Vectorproduct of both is PLL input Benefits: Saliency based: permanent operation at standstill No signal injection: operation at high speed Overview Predictive Torque Control Saliency Tracking Simulation Results Measurements Conclusion Institute for Electrical Drive Systems & Power Electronics Technische Universität München Arcisstr. 21, D Munich - peter.landsmann@tum.de
126 Sensorless (Encoderless) & Predictive Control encoderless control of synchronous machines fundamental model methods high frequency injection methods tracking of magnetic saliencies / anisotropies predictive control of power electronics basic principles Model Predictive Control (MPC) encoderless predictive control of synchronous machines idea performance and potential practical results conclusions Page 126
127 Industrial Needs The proposed PTC (Predictive Torque Control) method single scheme for wide speed range (no phase over) The sensorless control scheme presented here works from standstill to maximum speed does not inject any additional signal to the reference - neither fundamental frequency nor high frequency no additional noise (except usual noise by inverter supply) As long as there is a detectable saliency PTC is very robust to variations of the motor parameters? insensitivity with respect to parameter variations Page 127



128 SLED

129
130 Thank you!!!
Encoderless Control of AC Drives Recent Achievements Realistic and Unrealistic Expectations
 Encoderless Control of AC Drives Recent Achievements Realistic and Unrealistic Expectations Ralph M. Kennel, Technische Universitaet Muenchen, Germany kennel@ieee.org Reasons for Industrial Applications
Encoderless Control of AC Drives Recent Achievements Realistic and Unrealistic Expectations Ralph M. Kennel, Technische Universitaet Muenchen, Germany kennel@ieee.org Reasons for Industrial Applications
Encoderless Control of Synchronous Machines - State of the Art. Ralph M. Kennel, Technische Universität München, Germany
 Encoderless Control of Synchronous Machines - State of the Art Ralph M. Kennel, Technische Universität München, Germany Ralph.Kennel@tum.de Reasons for Industrial Applications of Drives with encoderless
Encoderless Control of Synchronous Machines - State of the Art Ralph M. Kennel, Technische Universität München, Germany Ralph.Kennel@tum.de Reasons for Industrial Applications of Drives with encoderless
Encoderless Control of AC Drives Recent Achievements Realistic and Unrealistic Expectations
 Encoderless Control of AC Drives Recent Achievements Realistic and Unrealistic Expectations Ralph M. Kennel, Technische Universitaet Muenchen, Germany kennel@ieee.org Reasons for Industrial Applications
Encoderless Control of AC Drives Recent Achievements Realistic and Unrealistic Expectations Ralph M. Kennel, Technische Universitaet Muenchen, Germany kennel@ieee.org Reasons for Industrial Applications
Vorlesung Bewegungssteuerung durch geregelte elektrische Antriebe. Predictive Control
 Vorlesung Bewegungssteuerung durch geregelte elektrische Antriebe Predictive Control A Simple and Powerful Method to Control Power Converters and Drives Ralph M. Kennel, Technische Universitaet Muenchen,
Vorlesung Bewegungssteuerung durch geregelte elektrische Antriebe Predictive Control A Simple and Powerful Method to Control Power Converters and Drives Ralph M. Kennel, Technische Universitaet Muenchen,
Vorlesung Bewegungssteuerung durch geregelte elektrische Antriebe. Predictive Control
 Vorlesung Bewegungssteuerung durch geregelte elektrische Antriebe Predictive Control A Simple and Powerful Method to Control Power Converters and Drives Ralph M. Kennel, Technische Universitaet Muenchen,
Vorlesung Bewegungssteuerung durch geregelte elektrische Antriebe Predictive Control A Simple and Powerful Method to Control Power Converters and Drives Ralph M. Kennel, Technische Universitaet Muenchen,
Predictive Control - A Simple and Powerful Method to Control Power Converters and Drives
 Predictive Control - A Simple and Powerful Method to Control Power Converters and Drives Ralph M. Kennel, Technische Universitaet Muenchen,Germany Marian Kazmierkowski, Technical University of Warsaw,
Predictive Control - A Simple and Powerful Method to Control Power Converters and Drives Ralph M. Kennel, Technische Universitaet Muenchen,Germany Marian Kazmierkowski, Technical University of Warsaw,
Sensorless Control of a Novel IPMSM Based on High-Frequency Injection
 Sensorless Control of a Novel IPMSM Based on High-Frequency Injection Xiaocan Wang*,Wei Xie**, Ralph Kennel*, Dieter Gerling** Institute for Electrical Drive Systems and Power Electronics,Technical University
Sensorless Control of a Novel IPMSM Based on High-Frequency Injection Xiaocan Wang*,Wei Xie**, Ralph Kennel*, Dieter Gerling** Institute for Electrical Drive Systems and Power Electronics,Technical University
Vector Control (Field Oriented Control, Direct Torque Control)
") Vector Control (Field Oriented Control, Direct Torque Control) Referents: Prof. Dr. Ing. Ralph Kennel (ralph.kennel@tum.de) Technische Universität München Arcisstraße 21 80333 München Germany 1 The General
Vector Control (Field Oriented Control, Direct Torque Control) Referents: Prof. Dr. Ing. Ralph Kennel (ralph.kennel@tum.de) Technische Universität München Arcisstraße 21 80333 München Germany 1 The General
Hardware-in-the-Loop Systems With Power Electronics a Powerful Simulation Tool
 Hardware-in-the-Loop Systems With Power Electronics a Powerful Simulation Tool Prof. Dr.-Ing. Ralph Kennel Technische Universität München Electrical Drive Systems and Power Electronics Hardware-in-the-Loop
Hardware-in-the-Loop Systems With Power Electronics a Powerful Simulation Tool Prof. Dr.-Ing. Ralph Kennel Technische Universität München Electrical Drive Systems and Power Electronics Hardware-in-the-Loop
Low Speed Position Estimation Scheme for Model Predictive Control with Finite Control Set
 Low Speed Position Estimation Scheme for Model Predictive Control with Finite Control Set Shamsuddeen Nalakath, Matthias Preindl, Nahid Mobarakeh Babak and Ali Emadi Department of Electrical and Computer
Low Speed Position Estimation Scheme for Model Predictive Control with Finite Control Set Shamsuddeen Nalakath, Matthias Preindl, Nahid Mobarakeh Babak and Ali Emadi Department of Electrical and Computer
Review article regarding possibilities for speed adjustment at reluctance synchronous motors
 Journal of Electrical and Electronic Engineering 03; (4): 85-89 Published online October 0, 03 (http://www.sciencepublishinggroup.com/j/jeee) doi: 0.648/j.jeee.03004.4 Review article regarding possibilities
Journal of Electrical and Electronic Engineering 03; (4): 85-89 Published online October 0, 03 (http://www.sciencepublishinggroup.com/j/jeee) doi: 0.648/j.jeee.03004.4 Review article regarding possibilities
Realising Robust Low Speed Sensorless PMSM Control Using Current Derivatives Obtained from Standard Current Sensors
 Realising Robust Low Speed Sensorless PMSM Control Using Current Derivatives Obtained from Standard Current Sensors Dr David Hind, Chen Li, Prof Mark Sumner, Prof Chris Gerada Power Electronics, Machines
Realising Robust Low Speed Sensorless PMSM Control Using Current Derivatives Obtained from Standard Current Sensors Dr David Hind, Chen Li, Prof Mark Sumner, Prof Chris Gerada Power Electronics, Machines
User Guide IRMCS3041 System Overview/Guide. Aengus Murray. Table of Contents. Introduction
 User Guide 0607 IRMCS3041 System Overview/Guide By Aengus Murray Table of Contents Introduction... 1 IRMCF341 Application Circuit... 2 Sensorless Control Algorithm... 4 Velocity and Current Control...
User Guide 0607 IRMCS3041 System Overview/Guide By Aengus Murray Table of Contents Introduction... 1 IRMCF341 Application Circuit... 2 Sensorless Control Algorithm... 4 Velocity and Current Control...
Abstract. Introduction. correct current. control. Sensorless Control. into. distortion in. implementation. pulse introduces a large speeds as show in
 Sensorless Control of High Power Induction Motors Using Multilevel Converters K. Saleh, M. Sumner, G. Asher, Q. Gao Department of Electrical and Electronic Engineering, University of Nottingham, Nottingham,
Sensorless Control of High Power Induction Motors Using Multilevel Converters K. Saleh, M. Sumner, G. Asher, Q. Gao Department of Electrical and Electronic Engineering, University of Nottingham, Nottingham,
SPEED CONTROL OF PERMANENT MAGNET SYNCHRONOUS MOTOR USING VOLTAGE SOURCE INVERTER
 SPEED CONTROL OF PERMANENT MAGNET SYNCHRONOUS MOTOR USING VOLTAGE SOURCE INVERTER Kushal Rajak 1, Rajendra Murmu 2 1,2 Department of Electrical Engineering, B I T Sindri, (India) ABSTRACT This paper presents
SPEED CONTROL OF PERMANENT MAGNET SYNCHRONOUS MOTOR USING VOLTAGE SOURCE INVERTER Kushal Rajak 1, Rajendra Murmu 2 1,2 Department of Electrical Engineering, B I T Sindri, (India) ABSTRACT This paper presents
ROBUST SPACE VECTOR CURRENT CONTROL FOR INDUCTION MOTOR DRIVES
 Journal of ELECTRICAL ENGINEERING, VOL. 57, NO. 2, 2006, 61 68 ROBUST SPACE VECTOR CURRENT CONTROL FOR INDUCTION MOTOR DRIVES Elwy E. El-kholy Ralph Kennel Abdo El-refaei Sabry Abd El-Latif Farok Elkady
Journal of ELECTRICAL ENGINEERING, VOL. 57, NO. 2, 2006, 61 68 ROBUST SPACE VECTOR CURRENT CONTROL FOR INDUCTION MOTOR DRIVES Elwy E. El-kholy Ralph Kennel Abdo El-refaei Sabry Abd El-Latif Farok Elkady
Latest Control Technology in Inverters and Servo Systems
 Latest Control Technology in Inverters and Servo Systems Takao Yanase Hidetoshi Umida Takashi Aihara. Introduction Inverters and servo systems have achieved small size and high performance through the
Latest Control Technology in Inverters and Servo Systems Takao Yanase Hidetoshi Umida Takashi Aihara. Introduction Inverters and servo systems have achieved small size and high performance through the
Effective Formulation of the DTC Strategy for Convergence and Stability Analysis The IPM Motor Drive Case Study
 Effective Formulation of the DTC Strategy for Convergence and Stability Analysis The IPM Motor Drive Case Study Adriano Faggion Silverio Bolognani Electric Drives Laboratory Department of Industrial Engineering
Effective Formulation of the DTC Strategy for Convergence and Stability Analysis The IPM Motor Drive Case Study Adriano Faggion Silverio Bolognani Electric Drives Laboratory Department of Industrial Engineering
User Guide Introduction. IRMCS3043 System Overview/Guide. International Rectifier s imotion Team. Table of Contents
 User Guide 08092 IRMCS3043 System Overview/Guide By International Rectifier s imotion Team Table of Contents IRMCS3043 System Overview/Guide... 1 Introduction... 1 IRMCF343 Application Circuit... 2 Power
User Guide 08092 IRMCS3043 System Overview/Guide By International Rectifier s imotion Team Table of Contents IRMCS3043 System Overview/Guide... 1 Introduction... 1 IRMCF343 Application Circuit... 2 Power
Control of Electric Machine Drive Systems
 Control of Electric Machine Drive Systems Seung-Ki Sul IEEE 1 PRESS к SERIES I 0N POWER ENGINEERING Mohamed E. El-Hawary, Series Editor IEEE PRESS WILEY A JOHN WILEY & SONS, INC., PUBLICATION Contents
Control of Electric Machine Drive Systems Seung-Ki Sul IEEE 1 PRESS к SERIES I 0N POWER ENGINEERING Mohamed E. El-Hawary, Series Editor IEEE PRESS WILEY A JOHN WILEY & SONS, INC., PUBLICATION Contents
CHAPTER 3 VOLTAGE SOURCE INVERTER (VSI)
") 37 CHAPTER 3 VOLTAGE SOURCE INVERTER (VSI) 3.1 INTRODUCTION This chapter presents speed and torque characteristics of induction motor fed by a new controller. The proposed controller is based on fuzzy
37 CHAPTER 3 VOLTAGE SOURCE INVERTER (VSI) 3.1 INTRODUCTION This chapter presents speed and torque characteristics of induction motor fed by a new controller. The proposed controller is based on fuzzy
Adaptive Flux-Weakening Controller for IPMSM Drives
 Adaptive Flux-Weakening Controller for IPMSM Drives Silverio BOLOGNANI 1, Sandro CALLIGARO 2, Roberto PETRELLA 2 1 Department of Electrical Engineering (DIE), University of Padova (Italy) 2 Department
Adaptive Flux-Weakening Controller for IPMSM Drives Silverio BOLOGNANI 1, Sandro CALLIGARO 2, Roberto PETRELLA 2 1 Department of Electrical Engineering (DIE), University of Padova (Italy) 2 Department
AC Drive Technology. An Overview for the Converting Industry. Siemens Industry, Inc All rights reserved.
 AC Drive Technology An Overview for the Converting Industry www.usa.siemens.com/converting Siemens Industry, Inc. 2016 All rights reserved. Answers for industry. AC Drive Technology Drive Systems AC Motors
AC Drive Technology An Overview for the Converting Industry www.usa.siemens.com/converting Siemens Industry, Inc. 2016 All rights reserved. Answers for industry. AC Drive Technology Drive Systems AC Motors
FOR the last decade, many research efforts have been made
 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 19, NO. 6, NOVEMBER 2004 1601 A Novel Approach for Sensorless Control of PM Machines Down to Zero Speed Without Signal Injection or Special PWM Technique Chuanyang
IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 19, NO. 6, NOVEMBER 2004 1601 A Novel Approach for Sensorless Control of PM Machines Down to Zero Speed Without Signal Injection or Special PWM Technique Chuanyang
Digital Control of Permanent Magnet Synchronous Motor
 Digital Control of Permanent Magnet Synchronous Motor Jayasri R. Nair 1 Assistant Professor, Dept. of EEE, Rajagiri School Of Engineering and Technology, Kochi, Kerala, India 1 ABSTRACT: The principle
Digital Control of Permanent Magnet Synchronous Motor Jayasri R. Nair 1 Assistant Professor, Dept. of EEE, Rajagiri School Of Engineering and Technology, Kochi, Kerala, India 1 ABSTRACT: The principle
Sistemi per il controllo motori
 Sistemi per il controllo motori TALENTIS 4ª SESSIONE - 28 MAGGIO 2018 Speaker: Ing. Giuseppe Scuderi Automation and Motion control team Central Lab Prodotti ST per il controllo motori 2 Applicazioni e
Sistemi per il controllo motori TALENTIS 4ª SESSIONE - 28 MAGGIO 2018 Speaker: Ing. Giuseppe Scuderi Automation and Motion control team Central Lab Prodotti ST per il controllo motori 2 Applicazioni e
BECAUSE OF their low cost and high reliability, many
 824 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 45, NO. 5, OCTOBER 1998 Sensorless Field Orientation Control of Induction Machines Based on a Mutual MRAS Scheme Li Zhen, Member, IEEE, and Longya
824 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 45, NO. 5, OCTOBER 1998 Sensorless Field Orientation Control of Induction Machines Based on a Mutual MRAS Scheme Li Zhen, Member, IEEE, and Longya
MATLAB/SIMULINK MODEL OF FIELD ORIENTED CONTROL OF PMSM DRIVE USING SPACE VECTORS
 MATLAB/SIMULINK MODEL OF FIELD ORIENTED CONTROL OF PMSM DRIVE USING SPACE VECTORS Remitha K Madhu 1 and Anna Mathew 2 1 Department of EE Engineering, Rajagiri Institute of Science and Technology, Kochi,
MATLAB/SIMULINK MODEL OF FIELD ORIENTED CONTROL OF PMSM DRIVE USING SPACE VECTORS Remitha K Madhu 1 and Anna Mathew 2 1 Department of EE Engineering, Rajagiri Institute of Science and Technology, Kochi,
SPEED CONTROL OF SENSORLESS BLDC MOTOR WITH FIELD ORIENTED CONTROL
 ISSN: 2349-2503 SPEED CONTROL OF SENSORLESS BLDC MOTOR WITH FIELD ORIENTED CONTROL JMuthupandi 1 DCitharthan 2 MVaratharaj 3 1 (UG Scholar/EEE department/ Christ the king engg college/ Coimbatore/India/
ISSN: 2349-2503 SPEED CONTROL OF SENSORLESS BLDC MOTOR WITH FIELD ORIENTED CONTROL JMuthupandi 1 DCitharthan 2 MVaratharaj 3 1 (UG Scholar/EEE department/ Christ the king engg college/ Coimbatore/India/
HIGH PERFORMANCE CONTROL OF AC DRIVES WITH MATLAB/SIMULINK MODELS
 HIGH PERFORMANCE CONTROL OF AC DRIVES WITH MATLAB/SIMULINK MODELS Haitham Abu-Rub Texas A&M University at Qatar, Qatar Atif Iqbal Qatar University, Qatar and Aligarh Muslim University, India Jaroslaw Guzinski
HIGH PERFORMANCE CONTROL OF AC DRIVES WITH MATLAB/SIMULINK MODELS Haitham Abu-Rub Texas A&M University at Qatar, Qatar Atif Iqbal Qatar University, Qatar and Aligarh Muslim University, India Jaroslaw Guzinski
EE 560 Electric Machines and Drives. Autumn 2014 Final Project. Contents
 EE 560 Electric Machines and Drives. Autumn 2014 Final Project Page 1 of 53 Prof. N. Nagel December 8, 2014 Brian Howard Contents Introduction 2 Induction Motor Simulation 3 Current Regulated Induction
EE 560 Electric Machines and Drives. Autumn 2014 Final Project Page 1 of 53 Prof. N. Nagel December 8, 2014 Brian Howard Contents Introduction 2 Induction Motor Simulation 3 Current Regulated Induction
IN MANY industrial applications, ac machines are preferable
 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 46, NO. 1, FEBRUARY 1999 111 Automatic IM Parameter Measurement Under Sensorless Field-Oriented Control Yih-Neng Lin and Chern-Lin Chen, Member, IEEE Abstract
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 46, NO. 1, FEBRUARY 1999 111 Automatic IM Parameter Measurement Under Sensorless Field-Oriented Control Yih-Neng Lin and Chern-Lin Chen, Member, IEEE Abstract
1. Introduction 1.1 Motivation and Objectives
 1. Introduction 1.1 Motivation and Objectives Today, the analysis and design of complex power electronic systems such as motor drives is usually done using a modern simulation software which can provide
1. Introduction 1.1 Motivation and Objectives Today, the analysis and design of complex power electronic systems such as motor drives is usually done using a modern simulation software which can provide
Contents. About the Authors. Abbreviations and Symbols
 About the Authors Preface Abbreviations and Symbols xi xiii xv 1 Principal Laws and Methods in Electrical Machine Design 1 1.1 Electromagnetic Principles 1 1.2 Numerical Solution 9 1.3 The Most Common
About the Authors Preface Abbreviations and Symbols xi xiii xv 1 Principal Laws and Methods in Electrical Machine Design 1 1.1 Electromagnetic Principles 1 1.2 Numerical Solution 9 1.3 The Most Common
A COMPARISON STUDY OF THE COMMUTATION METHODS FOR THE THREE-PHASE PERMANENT MAGNET BRUSHLESS DC MOTOR
 A COMPARISON STUDY OF THE COMMUTATION METHODS FOR THE THREE-PHASE PERMANENT MAGNET BRUSHLESS DC MOTOR Shiyoung Lee, Ph.D. Pennsylvania State University Berks Campus Room 120 Luerssen Building, Tulpehocken
A COMPARISON STUDY OF THE COMMUTATION METHODS FOR THE THREE-PHASE PERMANENT MAGNET BRUSHLESS DC MOTOR Shiyoung Lee, Ph.D. Pennsylvania State University Berks Campus Room 120 Luerssen Building, Tulpehocken
PREDICTIVE CONTROL OF INDUCTION MOTOR DRIVE USING DSPACE
 PREDICTIVE CONTROL OF INDUCTION MOTOR DRIVE USING DSPACE P. Karlovský, J. Lettl Department of electric drives and traction, Faculty of Electrical Engineering, Czech Technical University in Prague Abstract
PREDICTIVE CONTROL OF INDUCTION MOTOR DRIVE USING DSPACE P. Karlovský, J. Lettl Department of electric drives and traction, Faculty of Electrical Engineering, Czech Technical University in Prague Abstract
RTLinux Based Speed Control System of SPMSM with An Online Real Time Simulator
 Extended Summary pp.453 458 RTLinux Based Speed Control System of SPMSM with An Online Real Time Simulator Tsuyoshi Hanamoto Member (Kyushu Institute of Technology) Ahmad Ghaderi Non-member (Kyushu Institute
Extended Summary pp.453 458 RTLinux Based Speed Control System of SPMSM with An Online Real Time Simulator Tsuyoshi Hanamoto Member (Kyushu Institute of Technology) Ahmad Ghaderi Non-member (Kyushu Institute
Implementation and position control performance of a position-sensorless IPM motor drive system based on magnetic saliency
 Engineering Electrical Engineering fields Okayama University Year 1998 Implementation and position control performance of a position-sensorless IPM motor drive system based on magnetic saliency Satoshi
Engineering Electrical Engineering fields Okayama University Year 1998 Implementation and position control performance of a position-sensorless IPM motor drive system based on magnetic saliency Satoshi
Page ENSC387 - Introduction to Electro-Mechanical Sensors and Actuators: Simon Fraser University Engineering Science
 Motor Driver and Feedback Control: The feedback control system of a dc motor typically consists of a microcontroller, which provides drive commands (rotation and direction) to the driver. The driver is
Motor Driver and Feedback Control: The feedback control system of a dc motor typically consists of a microcontroller, which provides drive commands (rotation and direction) to the driver. The driver is
CHAPTER-III MODELING AND IMPLEMENTATION OF PMBLDC MOTOR DRIVE
 CHAPTER-III MODELING AND IMPLEMENTATION OF PMBLDC MOTOR DRIVE 3.1 GENERAL The PMBLDC motors used in low power applications (up to 5kW) are fed from a single-phase AC source through a diode bridge rectifier
CHAPTER-III MODELING AND IMPLEMENTATION OF PMBLDC MOTOR DRIVE 3.1 GENERAL The PMBLDC motors used in low power applications (up to 5kW) are fed from a single-phase AC source through a diode bridge rectifier
Modeling & Simulation of PMSM Drives with Fuzzy Logic Controller
 Vol. 3, Issue. 4, Jul - Aug. 2013 pp-2492-2497 ISSN: 2249-6645 Modeling & Simulation of PMSM Drives with Fuzzy Logic Controller Praveen Kumar 1, Anurag Singh Tomer 2 1 (ME Scholar, Department of Electrical
Vol. 3, Issue. 4, Jul - Aug. 2013 pp-2492-2497 ISSN: 2249-6645 Modeling & Simulation of PMSM Drives with Fuzzy Logic Controller Praveen Kumar 1, Anurag Singh Tomer 2 1 (ME Scholar, Department of Electrical
CHAPTER 2 STATE SPACE MODEL OF BLDC MOTOR
 29 CHAPTER 2 STATE SPACE MODEL OF BLDC MOTOR 2.1 INTRODUCTION Modelling and simulation have been an essential part of control system. The importance of modelling and simulation is increasing with the combination
29 CHAPTER 2 STATE SPACE MODEL OF BLDC MOTOR 2.1 INTRODUCTION Modelling and simulation have been an essential part of control system. The importance of modelling and simulation is increasing with the combination
Simulation and Analysis of SVPWM Based 2-Level and 3-Level Inverters for Direct Torque of Induction Motor
 International Journal of Electronic Engineering Research ISSN 0975-6450 Volume 1 Number 3 (2009) pp. 169 184 Research India Publications http://www.ripublication.com/ijeer.htm Simulation and Analysis of
International Journal of Electronic Engineering Research ISSN 0975-6450 Volume 1 Number 3 (2009) pp. 169 184 Research India Publications http://www.ripublication.com/ijeer.htm Simulation and Analysis of
EEE, St Peter s University, India 2 EEE, Vel s University, India
 Torque ripple reduction of switched reluctance motor drives below the base speed using commutation angles control S.Vetriselvan 1, Dr.S.Latha 2, M.Saravanan 3 1, 3 EEE, St Peter s University, India 2 EEE,
Torque ripple reduction of switched reluctance motor drives below the base speed using commutation angles control S.Vetriselvan 1, Dr.S.Latha 2, M.Saravanan 3 1, 3 EEE, St Peter s University, India 2 EEE,
Selected Problems of Induction Motor Drives with Voltage Inverter and Inverter Output Filters
 9 Selected Problems of Induction Motor Drives with Voltage Inverter and Inverter Output Filters Drives and Filters Overview. Fast switching of power devices in an inverter causes high dv/dt at the rising
9 Selected Problems of Induction Motor Drives with Voltage Inverter and Inverter Output Filters Drives and Filters Overview. Fast switching of power devices in an inverter causes high dv/dt at the rising
Modeling and Simulation of Field Oriented Control PMSM Drive System using SVPWM Technique
 International Journal of Engineering Trends and Technology (IJETT) olume 9 Number 4- September 26 Modeling and Simulation of Field Oriented Control PMSM Drive System using SPWM Technique Pradeep Kumar,
International Journal of Engineering Trends and Technology (IJETT) olume 9 Number 4- September 26 Modeling and Simulation of Field Oriented Control PMSM Drive System using SPWM Technique Pradeep Kumar,
MEM01: DC-Motor Servomechanism
 MEM01: DC-Motor Servomechanism Interdisciplinary Automatic Controls Laboratory - ME/ECE/CHE 389 February 5, 2016 Contents 1 Introduction and Goals 1 2 Description 2 3 Modeling 2 4 Lab Objective 5 5 Model
MEM01: DC-Motor Servomechanism Interdisciplinary Automatic Controls Laboratory - ME/ECE/CHE 389 February 5, 2016 Contents 1 Introduction and Goals 1 2 Description 2 3 Modeling 2 4 Lab Objective 5 5 Model
IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS, VOL. 9, NO. 3, AUGUST Zhixun Ma, Jianbo Gao, and Ralph Kennel, Senior Member, IEEE
 IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS, VOL. 9, NO. 3, AUGUST 2013 1253 FPGA Implementation of a Hybrid Sensorless Control of SMPMSM in the Whole Speed Range Zhixun Ma, Jianbo Gao, and Ralph Kennel,
IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS, VOL. 9, NO. 3, AUGUST 2013 1253 FPGA Implementation of a Hybrid Sensorless Control of SMPMSM in the Whole Speed Range Zhixun Ma, Jianbo Gao, and Ralph Kennel,
Synchronous Current Control of Three phase Induction motor by CEMF compensation
 Synchronous Current Control of Three phase Induction motor by CEMF compensation 1 Kiran NAGULAPATI, 2 Dhanamjaya Appa Rao, 3 Anil Kumar VANAPALLI 1,2,3 Assistant Professor, ANITS, Sangivalasa, Visakhapatnam,
Synchronous Current Control of Three phase Induction motor by CEMF compensation 1 Kiran NAGULAPATI, 2 Dhanamjaya Appa Rao, 3 Anil Kumar VANAPALLI 1,2,3 Assistant Professor, ANITS, Sangivalasa, Visakhapatnam,
Sensorless Control of Permanent Magnet Synchronous Motor Using Voltage Signal Injection
 http://dxdoiorg/105755/j01eee1961583 ELEKTRONIKA IR ELEKTROTECHNIKA ISSN 1392-1215 VOL 19 NO 6 2013 Sensorless Control of Permanent Magnet Synchronous Motor Using Voltage Signal Injection P Brandstetter
http://dxdoiorg/105755/j01eee1961583 ELEKTRONIKA IR ELEKTROTECHNIKA ISSN 1392-1215 VOL 19 NO 6 2013 Sensorless Control of Permanent Magnet Synchronous Motor Using Voltage Signal Injection P Brandstetter
Analysis of Voltage Source Inverters using Space Vector PWM for Induction Motor Drive
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) ISSN: 2278-1676 Volume 2, Issue 6 (Sep-Oct. 2012), PP 14-19 Analysis of Voltage Source Inverters using Space Vector PWM for Induction
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) ISSN: 2278-1676 Volume 2, Issue 6 (Sep-Oct. 2012), PP 14-19 Analysis of Voltage Source Inverters using Space Vector PWM for Induction
ADVANCED DC-DC CONVERTER CONTROLLED SPEED REGULATION OF INDUCTION MOTOR USING PI CONTROLLER
 Asian Journal of Electrical Sciences (AJES) Vol.2.No.1 2014 pp 16-21. available at: www.goniv.com Paper Received :08-03-2014 Paper Accepted:22-03-2013 Paper Reviewed by: 1. R. Venkatakrishnan 2. R. Marimuthu
Asian Journal of Electrical Sciences (AJES) Vol.2.No.1 2014 pp 16-21. available at: www.goniv.com Paper Received :08-03-2014 Paper Accepted:22-03-2013 Paper Reviewed by: 1. R. Venkatakrishnan 2. R. Marimuthu
The synchronous machine as a component in the electric power system
 1 The synchronous machine as a component in the electric power system dφ e = dt 2 lectricity generation The synchronous machine is used to convert the energy from a primary energy resource (such as water,
1 The synchronous machine as a component in the electric power system dφ e = dt 2 lectricity generation The synchronous machine is used to convert the energy from a primary energy resource (such as water,
A NEW MOTOR SPEED MEASUREMENT ALGORITHM BASED ON ACCURATE SLOT HARMONIC SPECTRAL ANALYSIS
 A NEW MOTOR SPEED MEASUREMENT ALGORITHM BASED ON ACCURATE SLOT HARMONIC SPECTRAL ANALYSIS M. Aiello, A. Cataliotti, S. Nuccio Dipartimento di Ingegneria Elettrica -Università degli Studi di Palermo Viale
A NEW MOTOR SPEED MEASUREMENT ALGORITHM BASED ON ACCURATE SLOT HARMONIC SPECTRAL ANALYSIS M. Aiello, A. Cataliotti, S. Nuccio Dipartimento di Ingegneria Elettrica -Università degli Studi di Palermo Viale
Current Slope Measurement Strategies for Sensorless Control of a Three Phase Radial Active Magnetic Bearing
 Current Slope Measurement Strategies for Sensorless Control of a Three Phase Radial Active Magnetic Bearing Matthias Hofer, Thomas Nenning, Markus Hutterer, and Manfred Schrödl Institute of Energy Systems
Current Slope Measurement Strategies for Sensorless Control of a Three Phase Radial Active Magnetic Bearing Matthias Hofer, Thomas Nenning, Markus Hutterer, and Manfred Schrödl Institute of Energy Systems
CHAPTER 2 CURRENT SOURCE INVERTER FOR IM CONTROL
 9 CHAPTER 2 CURRENT SOURCE INVERTER FOR IM CONTROL 2.1 INTRODUCTION AC drives are mainly classified into direct and indirect converter drives. In direct converters (cycloconverters), the AC power is fed
9 CHAPTER 2 CURRENT SOURCE INVERTER FOR IM CONTROL 2.1 INTRODUCTION AC drives are mainly classified into direct and indirect converter drives. In direct converters (cycloconverters), the AC power is fed
Sensorless Position Estimation in Fault-Tolerant Permanent Magnet AC Motor Drives with Redundancy
 Sensorless Position Estimation in Fault-Tolerant Permanent Magnet AC Motor Drives with Redundancy Jae Sam An Thesis submitted for the degree of Doctor of Philosophy The School of Electrical & Electronic
Sensorless Position Estimation in Fault-Tolerant Permanent Magnet AC Motor Drives with Redundancy Jae Sam An Thesis submitted for the degree of Doctor of Philosophy The School of Electrical & Electronic
Digital PWM Techniques and Commutation for Brushless DC Motor Control Applications: Review
 Digital PWM Techniques and Commutation for Brushless DC Motor Control Applications: Review Prof. S.L. Tade 1, Ravindra Sor 2 & S.V. Kinkar 3 Professor, Dept. of E&TC, PCCOE, Pune, India 1 Scientist, ARDE-DRDO,
Digital PWM Techniques and Commutation for Brushless DC Motor Control Applications: Review Prof. S.L. Tade 1, Ravindra Sor 2 & S.V. Kinkar 3 Professor, Dept. of E&TC, PCCOE, Pune, India 1 Scientist, ARDE-DRDO,
STM32 PMSM FOC SDK v3.2. 蒋建国 MCU Application Great China
 STM32 PMSM FOC SDK v3.2 蒋建国 MCU Application Great China Agenda 2 1 st day Morning Overview Key message Basics Feature Performance Hardware support Tools STM32 MC Workbench SDK components Architectural
STM32 PMSM FOC SDK v3.2 蒋建国 MCU Application Great China Agenda 2 1 st day Morning Overview Key message Basics Feature Performance Hardware support Tools STM32 MC Workbench SDK components Architectural
CONVERTERS IN POWER VOLTAGE-SOURCED SYSTEMS. Modeling, Control, and Applications IEEE UNIVERSITATSBIBLIOTHEK HANNOVER. Amirnaser Yazdani.
 VOLTAGE-SOURCED CONVERTERS IN POWER SYSTEMS Modeling, Control, and Applications Amirnaser Yazdani University of Western Ontario Reza Iravani University of Toronto r TECHNISCHE INFORMATIONSBIBLIOTHEK UNIVERSITATSBIBLIOTHEK
VOLTAGE-SOURCED CONVERTERS IN POWER SYSTEMS Modeling, Control, and Applications Amirnaser Yazdani University of Western Ontario Reza Iravani University of Toronto r TECHNISCHE INFORMATIONSBIBLIOTHEK UNIVERSITATSBIBLIOTHEK
3.1.Introduction. Synchronous Machines
 3.1.Introduction Synchronous Machines A synchronous machine is an ac rotating machine whose speed under steady state condition is proportional to the frequency of the current in its armature. The magnetic
3.1.Introduction Synchronous Machines A synchronous machine is an ac rotating machine whose speed under steady state condition is proportional to the frequency of the current in its armature. The magnetic
ROTOR FLUX VECTOR CONTROL TRACKING FOR SENSORLESS INDUCTION MOTOR
 International Journal of Scientific & Engineering Research, Volume 7, Issue 4, April-2016 668 ROTOR FLUX VECTOR CONTROL TRACKING FOR SENSORLESS INDUCTION MOTOR Fathima Farook 1, Reeba Sara Koshy 2 Abstract
International Journal of Scientific & Engineering Research, Volume 7, Issue 4, April-2016 668 ROTOR FLUX VECTOR CONTROL TRACKING FOR SENSORLESS INDUCTION MOTOR Fathima Farook 1, Reeba Sara Koshy 2 Abstract
An Induction Motor Control by Space Vector PWM Technique
 An Induction Motor Control by Space Vector PWM Technique Sanket Virani PG student Department of Electrical Engineering, Sarvajanik College of Engineering & Technology, Surat, India Abstract - This paper
An Induction Motor Control by Space Vector PWM Technique Sanket Virani PG student Department of Electrical Engineering, Sarvajanik College of Engineering & Technology, Surat, India Abstract - This paper
PWM SWITCHING STRATEGY FOR TORQUE RIPPLE MINIMIZATION IN BLDC MOTOR
 Journal of ELECTRICAL ENGINEERING, VOL. 62, NO. 3, 2011, 141 146 PWM SWITCHING STRATEGY FOR TORQUE RIPPLE MINIMIZATION IN BLDC MOTOR Wael A. Salah Dahaman Ishak Khaleel J. Hammadi This paper describes
Journal of ELECTRICAL ENGINEERING, VOL. 62, NO. 3, 2011, 141 146 PWM SWITCHING STRATEGY FOR TORQUE RIPPLE MINIMIZATION IN BLDC MOTOR Wael A. Salah Dahaman Ishak Khaleel J. Hammadi This paper describes
Type of loads Active load torque: - Passive load torque :-
 Type of loads Active load torque: - Active torques continues to act in the same direction irrespective of the direction of the drive. e.g. gravitational force or deformation in elastic bodies. Passive
Type of loads Active load torque: - Active torques continues to act in the same direction irrespective of the direction of the drive. e.g. gravitational force or deformation in elastic bodies. Passive
A Practical Primer On Motor Drives (Part 13): Motor Drive Control Architectures And Algorithms
: Motor Drive Control Architectures And Algorithms") ISSUE: February 2017 A Practical Primer On Motor Drives (Part 13): Motor Drive Control Architectures And Algorithms by Ken Johnson, Teledyne LeCroy, Chestnut Ridge, N.Y. Part 12 began the explanation of
ISSUE: February 2017 A Practical Primer On Motor Drives (Part 13): Motor Drive Control Architectures And Algorithms by Ken Johnson, Teledyne LeCroy, Chestnut Ridge, N.Y. Part 12 began the explanation of
630 IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS, VOL. 9, NO. 2, MAY 2013
 630 IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS, VOL. 9, NO. 2, MAY 2013 Development of High-Reliability EV and HEV IM Propulsion Drive With Ultra-Low Latency HIL Environment Evgenije M. Adžić, Member,
630 IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS, VOL. 9, NO. 2, MAY 2013 Development of High-Reliability EV and HEV IM Propulsion Drive With Ultra-Low Latency HIL Environment Evgenije M. Adžić, Member,
Novel Hybrid Observers For A Sensorless MPPT Controller And Its Experiment Verification Using A Wind Turbine Generator Simulator
 Novel Hybrid Observers For A Sensorless MPPT Controller And Its Experiment Verification Using A Wind Turbine Generator Simulator A. J. Mahdi Department of Electrical Engineering, College of Engineering,
Novel Hybrid Observers For A Sensorless MPPT Controller And Its Experiment Verification Using A Wind Turbine Generator Simulator A. J. Mahdi Department of Electrical Engineering, College of Engineering,
CHAPTER 4 CONTROL ALGORITHM FOR PROPOSED H-BRIDGE MULTILEVEL INVERTER
 65 CHAPTER 4 CONTROL ALGORITHM FOR PROPOSED H-BRIDGE MULTILEVEL INVERTER 4.1 INTRODUCTION Many control strategies are available for the control of IMs. The Direct Torque Control (DTC) is one of the most
65 CHAPTER 4 CONTROL ALGORITHM FOR PROPOSED H-BRIDGE MULTILEVEL INVERTER 4.1 INTRODUCTION Many control strategies are available for the control of IMs. The Direct Torque Control (DTC) is one of the most
Design of Joint Controller Circuit for PA10 Robot Arm
 Design of Joint Controller Circuit for PA10 Robot Arm Sereiratha Phal and Manop Wongsaisuwan Department of Electrical Engineering, Faculty of Engineering, Chulalongkorn University, Bangkok, 10330, Thailand.
Design of Joint Controller Circuit for PA10 Robot Arm Sereiratha Phal and Manop Wongsaisuwan Department of Electrical Engineering, Faculty of Engineering, Chulalongkorn University, Bangkok, 10330, Thailand.
Laboratory Investigation of Variable Speed Control of Synchronous Generator With a Boost Converter for Wind Turbine Applications
 Laboratory Investigation of Variable Speed Control of Synchronous Generator With a Boost Converter for Wind Turbine Applications Ranjan Sharma Technical University of Denmark ransharma@gmail.com Tonny
Laboratory Investigation of Variable Speed Control of Synchronous Generator With a Boost Converter for Wind Turbine Applications Ranjan Sharma Technical University of Denmark ransharma@gmail.com Tonny
Highly Integrated Inverter with Multiturn Encoder and Software-based PFC for Low Cost Applications
 Highly Integrated Inverter with Multiturn Encoder and Software-based PFC for Low Cost Applications Kilian Nötzold, Andreas Uphues Retostronik GmbH Gevelsberg, Germany http://www.retostronik.de/ Ralf Wegener
Highly Integrated Inverter with Multiturn Encoder and Software-based PFC for Low Cost Applications Kilian Nötzold, Andreas Uphues Retostronik GmbH Gevelsberg, Germany http://www.retostronik.de/ Ralf Wegener
Digital Control of Industrial Servo Drives for Machine Tools
 Digital Control of Industrial Servo Drives for Machine Tools BERGISCHE UNIVERSITÄT-GESAMTHOCHSCHULE WUPPERTAL Lehrstuhl für Elektrische Maschinen und Antriebe Gaußstraße 20 D-42097 Wuppertal Tel.: +49-202-439-3950
Digital Control of Industrial Servo Drives for Machine Tools BERGISCHE UNIVERSITÄT-GESAMTHOCHSCHULE WUPPERTAL Lehrstuhl für Elektrische Maschinen und Antriebe Gaußstraße 20 D-42097 Wuppertal Tel.: +49-202-439-3950
Simple speed sensorless DTC-SVM scheme for induction motor drives
 BULLETIN OF THE POLISH ACADEMY OF SCIENCES TECHNICAL SCIENCES, Vol. 61, No. 2, 2013 DOI: 10.2478/bpasts-2013-0028 Simple speed sensorless DTC-SVM scheme for induction motor drives H. ABU-RUB 1, D. STANDO
BULLETIN OF THE POLISH ACADEMY OF SCIENCES TECHNICAL SCIENCES, Vol. 61, No. 2, 2013 DOI: 10.2478/bpasts-2013-0028 Simple speed sensorless DTC-SVM scheme for induction motor drives H. ABU-RUB 1, D. STANDO
Modeling and Simulation of Induction Motor Drive with Space Vector Control
 Australian Journal of Basic and Applied Sciences, 5(9): 2210-2216, 2011 ISSN 1991-8178 Modeling and Simulation of Induction Motor Drive with Space Vector Control M. SajediHir, Y. Hoseynpoor, P. MosadeghArdabili,
Australian Journal of Basic and Applied Sciences, 5(9): 2210-2216, 2011 ISSN 1991-8178 Modeling and Simulation of Induction Motor Drive with Space Vector Control M. SajediHir, Y. Hoseynpoor, P. MosadeghArdabili,
ELECTRONIC CONTROL OF A.C. MOTORS
 CONTENTS C H A P T E R46 Learning Objectives es Classes of Electronic AC Drives Variable Frequency Speed Control of a SCIM Variable Voltage Speed Control of a SCIM Chopper Speed Control of a WRIM Electronic
CONTENTS C H A P T E R46 Learning Objectives es Classes of Electronic AC Drives Variable Frequency Speed Control of a SCIM Variable Voltage Speed Control of a SCIM Chopper Speed Control of a WRIM Electronic
Parameter-independent estimation strategy combining HF signal injection and sliding mode methodology for AC self-sensing control machines.
 Parameter-independent estimation strategy combining HF signal injection and sliding mode methodology for AC self-sensing control machines. Application to EV/HEV powertrains Renault - Ecole Centrale de
Parameter-independent estimation strategy combining HF signal injection and sliding mode methodology for AC self-sensing control machines. Application to EV/HEV powertrains Renault - Ecole Centrale de
Stability of Voltage using Different Control strategies In Isolated Self Excited Induction Generator for Variable Speed Applications
 Stability of Voltage using Different Control strategies In Isolated Self Excited Induction Generator for Variable Speed Applications Shilpa G.K #1, Plasin Francis Dias *2 #1 Student, Department of E&CE,
Stability of Voltage using Different Control strategies In Isolated Self Excited Induction Generator for Variable Speed Applications Shilpa G.K #1, Plasin Francis Dias *2 #1 Student, Department of E&CE,
CONTROL OF A BRUSHLESS PERMANENT MAGNET MACHINE USING AN INTEGRATED TORQUE SENSOR IN PLACE OF A ROTOR POSITION SENSOR
 CONTROL OF A BRUSHLESS PERMANENT MAGNET MACHINE USING AN INTEGRATED TORQUE SENSOR IN PLACE OF A ROTOR POSITION SENSOR A thesis submitted to the University of Manchester for the degree of Doctor of Philosophy
CONTROL OF A BRUSHLESS PERMANENT MAGNET MACHINE USING AN INTEGRATED TORQUE SENSOR IN PLACE OF A ROTOR POSITION SENSOR A thesis submitted to the University of Manchester for the degree of Doctor of Philosophy
Modeling and Simulation Analysis of Eleven Phase Brushless DC Motor
 Modeling and Simulation Analysis of Eleven Phase Brushless DC Motor Priyanka C P 1,Sija Gopinathan 2, Anish Gopinath 3 M. Tech Student, Department of EEE, Mar Athanasius College of Engineering, Kothamangalam,
Modeling and Simulation Analysis of Eleven Phase Brushless DC Motor Priyanka C P 1,Sija Gopinathan 2, Anish Gopinath 3 M. Tech Student, Department of EEE, Mar Athanasius College of Engineering, Kothamangalam,
Control of Induction Motor Fed with Inverter Using Direct Torque Control - Space Vector Modulation Technique
 Control of Induction Motor Fed with Inverter Using Direct Torque Control - Space Vector Modulation Technique Vikas Goswami 1, Sulochana Wadhwani 2 1 Department Of Electrical Engineering, MITS Gwalior 2
Control of Induction Motor Fed with Inverter Using Direct Torque Control - Space Vector Modulation Technique Vikas Goswami 1, Sulochana Wadhwani 2 1 Department Of Electrical Engineering, MITS Gwalior 2
Design of A Closed Loop Speed Control For BLDC Motor
 International Refereed Journal of Engineering and Science (IRJES) ISSN (Online) 2319-183X, (Print) 2319-1821 Volume 3, Issue 11 (November 214), PP.17-111 Design of A Closed Loop Speed Control For BLDC
International Refereed Journal of Engineering and Science (IRJES) ISSN (Online) 2319-183X, (Print) 2319-1821 Volume 3, Issue 11 (November 214), PP.17-111 Design of A Closed Loop Speed Control For BLDC
1. Explain in detail the constructional details and working of DC motor.
 DHANALAKSHMI SRINIVASAN INSTITUTE OF RESEARCH AND TECHNOLOGY, PERAMBALUR DEPT OF ECE EC6352-ELECTRICAL ENGINEERING AND INSTRUMENTATION UNIT 1 PART B 1. Explain in detail the constructional details and
DHANALAKSHMI SRINIVASAN INSTITUTE OF RESEARCH AND TECHNOLOGY, PERAMBALUR DEPT OF ECE EC6352-ELECTRICAL ENGINEERING AND INSTRUMENTATION UNIT 1 PART B 1. Explain in detail the constructional details and
Speed control of sensorless BLDC motor with two side chopping PWM
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 6, Issue 3 (May. - Jun. 2013), PP 16-20 Speed control of sensorless BLDC motor with two side
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 6, Issue 3 (May. - Jun. 2013), PP 16-20 Speed control of sensorless BLDC motor with two side
Simulation of Speed Control of Induction Motor with DTC Scheme Patel Divyaben Lalitbhai 1 Prof. C. A. Patel 2 Mr. B. R. Nanecha 3
 IJSRD - International Journal for Scientific Research & Development Vol. 3, Issue 09, 2015 ISSN (online): 2321-0613 Simulation of Speed Control of Induction Motor with DTC Scheme Patel Divyaben Lalitbhai
IJSRD - International Journal for Scientific Research & Development Vol. 3, Issue 09, 2015 ISSN (online): 2321-0613 Simulation of Speed Control of Induction Motor with DTC Scheme Patel Divyaben Lalitbhai
UNIT-III STATOR SIDE CONTROLLED INDUCTION MOTOR DRIVE
 UNIT-III STATOR SIDE CONTROLLED INDUCTION MOTOR DRIVE 3.1 STATOR VOLTAGE CONTROL The induction motor 'speed can be controlled by varying the stator voltage. This method of speed control is known as stator
UNIT-III STATOR SIDE CONTROLLED INDUCTION MOTOR DRIVE 3.1 STATOR VOLTAGE CONTROL The induction motor 'speed can be controlled by varying the stator voltage. This method of speed control is known as stator
VALLIAMMAI ENGINEERING COLLEGE
 VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur 603 203 DEPARTMENT OF ELECTRONICS AND INSTRUMENTATION ENGINEERING QUESTION BANK IV SEMESTER EI6402 ELECTRICAL MACHINES Regulation 2013 Academic
VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur 603 203 DEPARTMENT OF ELECTRONICS AND INSTRUMENTATION ENGINEERING QUESTION BANK IV SEMESTER EI6402 ELECTRICAL MACHINES Regulation 2013 Academic
A Comparative Study between DPC and DPC-SVM Controllers Using dspace (DS1104)
") International Journal of Electrical and Computer Engineering (IJECE) Vol. 4, No. 3, June 2014, pp. 322 328 ISSN: 2088-8708 322 A Comparative Study between DPC and DPC-SVM Controllers Using dspace (DS1104)
International Journal of Electrical and Computer Engineering (IJECE) Vol. 4, No. 3, June 2014, pp. 322 328 ISSN: 2088-8708 322 A Comparative Study between DPC and DPC-SVM Controllers Using dspace (DS1104)
Generalized Theory Of Electrical Machines
 Essentials of Rotating Electrical Machines Generalized Theory Of Electrical Machines All electrical machines are variations on a common set of fundamental principles, which apply alike to dc and ac types,
Essentials of Rotating Electrical Machines Generalized Theory Of Electrical Machines All electrical machines are variations on a common set of fundamental principles, which apply alike to dc and ac types,
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 53, NO. 2, APRIL
 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 53, NO. 2, APRIL 2006 399 Sensorless Speed Control of Nonsalient Permanent-Magnet Synchronous Motor Using Rotor-Position-Tracking PI Controller Jul-Ki
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 53, NO. 2, APRIL 2006 399 Sensorless Speed Control of Nonsalient Permanent-Magnet Synchronous Motor Using Rotor-Position-Tracking PI Controller Jul-Ki
Sensorless control of BLDC motor based on Hysteresis comparator with PI control for speed regulation
 Sensorless control of BLDC motor based on Hysteresis comparator with PI control for speed regulation Thirumoni.T 1,Femi.R 2 PG Student 1, Assistant Professor 2, Department of Electrical and Electronics
Sensorless control of BLDC motor based on Hysteresis comparator with PI control for speed regulation Thirumoni.T 1,Femi.R 2 PG Student 1, Assistant Professor 2, Department of Electrical and Electronics
New Direct Torque Control of DFIG under Balanced and Unbalanced Grid Voltage
 1 New Direct Torque Control of DFIG under Balanced and Unbalanced Grid Voltage B. B. Pimple, V. Y. Vekhande and B. G. Fernandes Department of Electrical Engineering, Indian Institute of Technology Bombay,
1 New Direct Torque Control of DFIG under Balanced and Unbalanced Grid Voltage B. B. Pimple, V. Y. Vekhande and B. G. Fernandes Department of Electrical Engineering, Indian Institute of Technology Bombay,
Simulation And Comparison Of Space Vector Pulse Width Modulation For Three Phase Voltage Source Inverter
 Simulation And Comparison Of Space Vector Pulse Width Modulation For Three Phase Voltage Source Inverter Associate Prof. S. Vasudevamurthy Department of Electrical and Electronics Dr. Ambedkar Institute
Simulation And Comparison Of Space Vector Pulse Width Modulation For Three Phase Voltage Source Inverter Associate Prof. S. Vasudevamurthy Department of Electrical and Electronics Dr. Ambedkar Institute
Interactions Between Electrical Machine and Power Electronics
 Interactions Between Electrical Machine and Power Electronics Prof. Dr. Ing. Ralph Kennel (ralph.kennel@tum.de) Technische Universität München Arcisstraße 21 80333 München Additional Losses Prof. Dr. Ing.
Interactions Between Electrical Machine and Power Electronics Prof. Dr. Ing. Ralph Kennel (ralph.kennel@tum.de) Technische Universität München Arcisstraße 21 80333 München Additional Losses Prof. Dr. Ing.
A Modified Sychronous Current Regulator for Brushless Motor Control
 A Modified Sychronous Current Regulator for Brushless Motor Control Shane Colton Graduate Student, Department of Mechanical Engineering Massachusetts Institute of Technology Rev0 - Doctoral
A Modified Sychronous Current Regulator for Brushless Motor Control Shane Colton Graduate Student, Department of Mechanical Engineering Massachusetts Institute of Technology Rev0 - Doctoral
Analog Devices: High Efficiency, Low Cost, Sensorless Motor Control.
 Analog Devices: High Efficiency, Low Cost, Sensorless Motor Control. Dr. Tom Flint, Analog Devices, Inc. Abstract In this paper we consider the sensorless control of two types of high efficiency electric
Analog Devices: High Efficiency, Low Cost, Sensorless Motor Control. Dr. Tom Flint, Analog Devices, Inc. Abstract In this paper we consider the sensorless control of two types of high efficiency electric
ADVANCED ROTOR POSITION DETECTION TECHNIQUE FOR SENSORLESS BLDC MOTOR CONTROL
 International Journal of Soft Computing and Engineering (IJSCE) ISSN: 3137, Volume, Issue-1, March 1 ADVANCED ROTOR POSITION DETECTION TECHNIQUE FOR SENSORLESS BLDC MOTOR CONTROL S.JOSHUWA, E.SATHISHKUMAR,
International Journal of Soft Computing and Engineering (IJSCE) ISSN: 3137, Volume, Issue-1, March 1 ADVANCED ROTOR POSITION DETECTION TECHNIQUE FOR SENSORLESS BLDC MOTOR CONTROL S.JOSHUWA, E.SATHISHKUMAR,
Three Phase Induction Motor Drive Using Single Phase Inverter and Constant V/F method
 Three Phase Induction Motor Drive Using Single Phase Inverter and Constant V/F method Nitin Goel 1, Shashi yadav 2, Shilpa 3 Assistant Professor, Dept. of EE, YMCA University of Science & Technology, Faridabad,
Three Phase Induction Motor Drive Using Single Phase Inverter and Constant V/F method Nitin Goel 1, Shashi yadav 2, Shilpa 3 Assistant Professor, Dept. of EE, YMCA University of Science & Technology, Faridabad,
Traction Drive with PMSM: Frequency Characteristics Measurement
 Transactions on Electrical Engineering, Vol. 1 (2012), No. 1 13 Traction Drive with PMSM: Frequency Characteristics Measurement Tomáš Glasberger 1), Zdeněk Peroutka 2) Martin Janda 3), Jan Majorszký 4)
Transactions on Electrical Engineering, Vol. 1 (2012), No. 1 13 Traction Drive with PMSM: Frequency Characteristics Measurement Tomáš Glasberger 1), Zdeněk Peroutka 2) Martin Janda 3), Jan Majorszký 4)
MEGA Servo setup procedure for driving PMS motor
 Application Note AN-MEGA-0016-v105EN MEGA Servo setup procedure for driving PMS motor Inverter type FRENIC MEGA (-EAQ Type) Software version 1700 Required options OPC-G1-PG, OPC-G1-PG2, OPC-G1-PG22, OPC-G1-PMPG
Application Note AN-MEGA-0016-v105EN MEGA Servo setup procedure for driving PMS motor Inverter type FRENIC MEGA (-EAQ Type) Software version 1700 Required options OPC-G1-PG, OPC-G1-PG2, OPC-G1-PG22, OPC-G1-PMPG