Sound Sensing Robot. Different Tasks for Different Frequencies Group 1 Jiaming Lin and Patrick Williams
|
|
|
- Franklin Gilmore
- 6 years ago
- Views:
Transcription
1 Sound Sensing Robot Different Tasks for Different Frequencies Group 1 Jiaming Lin and Patrick Williams

2 Circuitry Block Diagram Arduino Input Pins Electret Microphone Board with OPA344 Operational Amplifier
3 Programming Two tasks: move toward or circle sound source depending on logic high at digital read Forward when facing correct direction Slight turn while moving forward when pointed close to correct direction Rotate when far from correct direction Direction of turn depends on relative voltages at analog reads





4 HEAT SEEKING ROBOT Henry Knutzen Alex St. Claire Lab Bench #3




5 DESCRIPTION MLX90614 infrared temperature sensor Configurable using serial interface Outputs PWM signal, duty cycle proportional to temperature Use array of IR temperature sensors to point robot at hottest object in the room Use servo to fire Nerf gun at hottest object
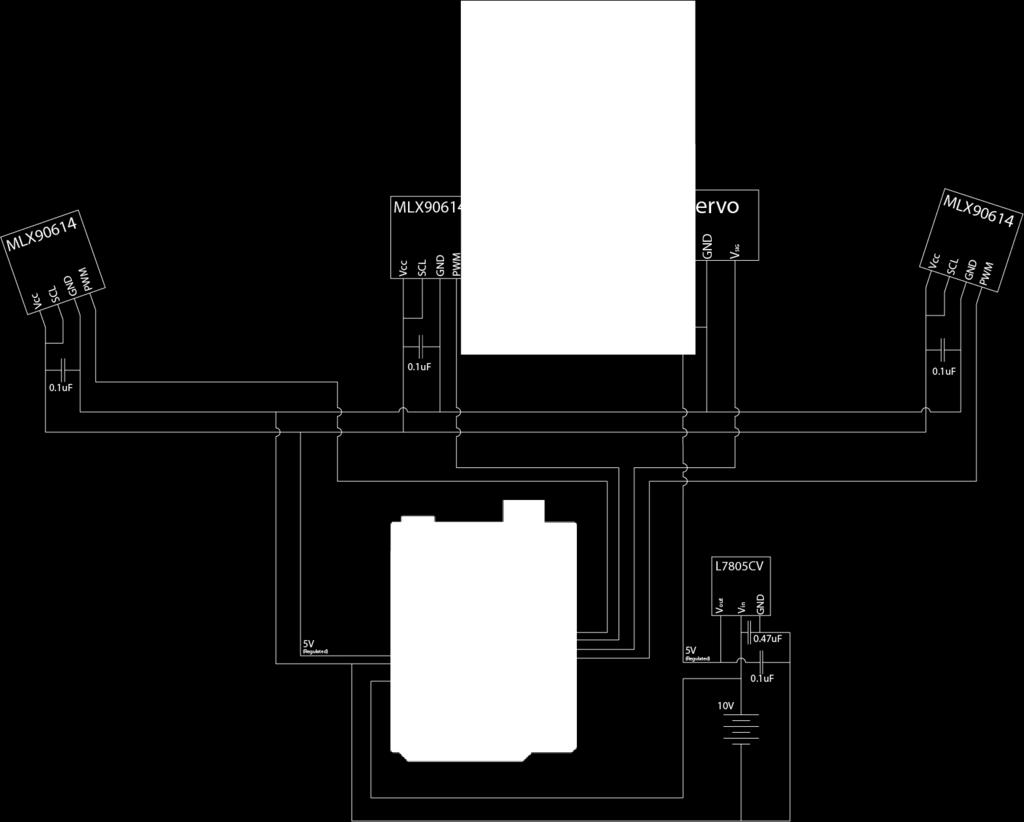
6 ELECTRICAL SCHEMATIC
7 Dog-Bot Eric Daugherty Ben Herman ECEN 2270 Electronics Design Laboratory 1
 Barking Listen for command Reposition ears, listen for second")

8 Additional Hardware 2x Servo Motors Ear rotation 2x Microphone Auditory input Speaker (w/amplifier) Barking Listen for command Reposition ears, listen for second command Determine direction of source, move towards it Upon completion, bark! How it works BOB ROB COM BOB ECEN 2270 Electronics Design Laboratory 2

9 Schematic ECEN 2270 Electronics Design Laboratory 3
10 Pirate Robot Kyle Wislinsky Clint Olsen Lab Group 5 ECEN 2270 Electronics Design Laboratory 1
11 What will it do? Bluetooth controlled Motorized plank for dealing with mutinies Motorized flag for hoisting the colors Projectile launcher ECEN 2270 Electronics Design Laboratory 2


12 Schematic ECEN 2270 Electronics Design Laboratory 3

13 Walter Wright Derek Prince Bench 6 Ping pong ball launcher obstacle course
14 Project outline Final design: - A robot that is controlled via a phone app that users will navigate through a course and shoot ping pong balls into baskets in the shortest amount of time possible. Implementation: - Phone communicates to Arduino board using a bluetooth module. - Arduino controls the movement of the robot and activates the ping pong ball launcher.

 that each send a unique")
15 Phone controller - Entire robot will be controlled by user through a phone app. - App will allow user to tell the robot to move forwards, backwards, left, right, and to fire the ping pong ball launcher. Forward Forward User has 5 buttons (forward, backwards, left, right, fire) that each send a unique ASCII number to the bluetooth module. Bluetooth module sends ASCII number to Arduino through UART, Arduino translates ASCII into a command.

 Motor 2 Control Wire (goes to a mirror circuit) +5V DC, 20-45 ma")
16 Ping pong ball launcher 500mA V in Motor 1 Control Wire Motor current is given by: I m = V in / R sense 5V on / 0V off Only ~10 pa of current when motor is off Image taken from Francisco Dias s Arduino controlled Ping Pong Balls Launcher ( /id/arduino-controlled-ping- Pong-Balls-Launcher/) Motor 2 Control Wire (goes to a mirror circuit) +5V DC, ma (idle and Tx/Rx draw) Serial Rx (green) Serial Tx (yellow) Ground SparkFun BlueSMiRF Silver Bluetooth Modem
17 Remote Controlled Robot with Color and Light Sensing Capabilities Ruben Vargas Miles Shayler Laboratory Bench #7


18 Concept and Objectives - Wirelessly remote controlled robot utilizing speed control circuits, the transmitter and receiver circuits, the MSP42 microcontroller, RGB color and luminosity sensors, and the attached Educational Boosterpack MKII. - Capable of sensing color and outputting it via an RGB LED light. - Turns LED on whenever room goes dark via the use of a luminosity sensor.

19 Schematic and Overview
20 Collision Prevention Circuit Ian Schneier Melissa Mantey Bench 8 ECEN 2830 Electronics Design Laboratory 1

21 The Plan Collision prevention circuit Detect distance using HC-SR04 Ultrasonic Sensor Control speed sensor using sensor output Arduino Sensor Pulse to Digital Signal Converter Wheel Direction Control HC-SR04 Ultrasonic Sensor ECEN 2270 Electronics Design Laboratory 2



22 Circuit Diagram HC-SR04 Ultrasonic Sensor 5V ECEN 2830 Electronics Design Laboratory 3

23 Dog Bot Jonathan Peterson & Charlie Vail Bench 9

24 What will Dog Bot do? Give voice commands to Dog Bot Depending on the voice command given, Dog Bot will perform an instruction Ex: We ll say Dog Bot, sit. and Dog Bot barks, and then will stop moving. This will be done with a voice recognition module that is compatible with Arduino Model: AU_VOI_REC_00A Dog Bot will respond with barks to confirm received instructions, outputted through a speaker


25 Block Diagram Microphone Power Voice Recognition Sound File Arduino Motors Speaker
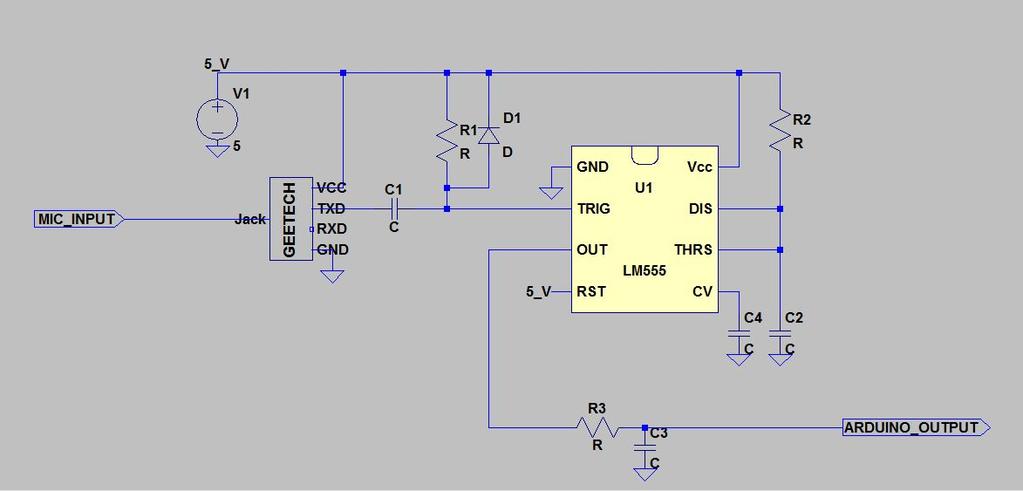
26 Voice Recognition Bot Cameron Schimmoller John Kim Lab Bench 11

")
27 Audio input Voice recognition Decoder (monostable 555 timer) Microcontroller (Arduino)
28
29

30 Block Diagram on Robot


31
32 Ball Fetching Robot Matt Zarekani, Milan Formanek
33 The user will throws a ball Basic Outline The robot then finds the ball and retrieves it for the user. Image recognitioning Open CV + python Needs substantially more computing power than the Arduino can provide Device to physically manipulate the ball Electromagnet (coil) and mosfet circuit to drive it
34 Raspberry Pi Navigation Logic Ball Position Open CV Image Recognitioning USB Arduino SPI Ball Robot operational control Mosfet Driver 12 V 0.33 A Motor control Positional information
35 The Light Hound A Reflected Light Follower Logan Foley & Samuel Piper Team 16
36 General Overview The robot follows a person using reflected light, now you can pretend to have a friend The chassis shines a light powered by the Arduino Reflective tape reflects light back at the chassis Ambient light sensors determine which direction it should move

37 Parts and Usage Ambient Light Sensor - Increases the output voltage based on detected light - Powered off of 6 V CC - 5 will be used to determine general direction of light - Connected to analog Arduino Inputs Light - Emits photons - Powered off of 12 V DC - An external power supply will be used for this Reflective Tape - Reflects light - It s tape
38 Wiring
39 ECEN 2270 Final Project Dancing Robot Group 17: Zhou He, Hoiwang Wong Nov. 14, 2016



40 Overview Series of simple notes Series of moves with music


41 Block Diagram Robot Instrument Simulation APP Speaker Buffer On the board 5v Output Sound Sensor Arduino Input and store
42 Obstacle avoiding Robot Group 18 Jinhong Chen Yang Hu
43 Here are the things of what we are going to do Use the Arduino with connecting to ultrasonic range finder sensors to avoid collisions. When it find the obstacle, It will stop going forward. And start to rotate till it can t detect the obstacle, then it will start to go forward. if all the direction be surrounded by obstacles, a buzzer will begin to alert. hardware requirement 1.Arduino Board 2. HC SR04 This is an Ultrasonic Range Finder Sensor. It is a non-contact based distance measurement system and can measure distance of 2cm to 4m.
44 How it work? BUT! If here is no track and be Surrounded by obstacles, a buzzer Will begin to alert. Trig echo this ultrasonic sensor is consist of the trigger signal Transmitter and receiver in order to calculate the Distance between the obstacle and the robot.if it s less than 15 cm distance, then the signal will send to the Arduino,it not, then it will keep going forward. 11 th pin 10 th pin Two motors with the left wheel And right wheel See if it s less than 15cm distance to the obstacle If yes, then it will send the signal to motor that begin To rotate till no obstacle can be found, it will begin to go Forward. Future steps that may be added: 1. A sound sensor may be added to give the Initial direction and start the robot.by recognizing the frequency of the claps. It will move to different directions.
45 Final Project Sachio Kimura
46 Lab 5 11/14 11/18 For the next week finish lab 5 Fully functioning robot


47 Project Idea Enviro-Bot - Collect temperature and humidity of surrounding area - Sensory patrol for automated readings - Water spray to change humidity - Lights



48 Materials DHT11 Humidity & Temperature Sensor Rangefinders Solenoid switch &water spray LEDs
49 Line Follower Mallory Hoover, Derek Mullen, Lauren Lee Group 21
50 Block Diagram LEDs Light Sensors Arduino Motor Driver


51 Schematic COM V 80mA 3.3V 60mA SEN PRT-12699
52 Roaming Robot Lab Bench 23 Boskin Erkocevic Marika Schubert Samantha Williams




53 Project Goals Program robot to roam around the room Avoid obstructing objects by detecting them with ultrasonic sensing Stop roaming when hit with an LED flashlight Incorporate sound effects using a buzzer

54 Notable Part List Voltage divider and comparator circuit for detecting flashlight Green flashlight Ultrasonic sensor - HC-SR04 Photoresistor - PDV-P8103-ND Comparator - TLC3702 Uxcell DC 5V Buzzers Various resistors from the kit Tuning comparator threshold Current limiting TTL OR gate chip Output of photo resistor circuit to Arduino interrupt pin
55 Object Detection Robot Andrew Shepherd Maxwell Maurice


56 Functionality/Parts Ultrasonic Sensor - HC-SR04 Operating Voltage: 5V DC Operating Current: 15mA Maximum Range: 4m Minimum Range: 2cm Trigger Pulse Input Echo Pulse Output Phototransistor - OSRAM SFH 3310 Wavelength of max. sensitivity: 570nm (Green Light) Maximum collector Voltage: 5.5V Maximum collector current: 20mA Dark current: 3nA Green LED Peak emission at ~570nm Bumper Collision Detection Forward Ultrasonic Proximity Detection Line Following Capability



57 Block Diagram Arduino 1: Controls motion of the robot 5v DC Arduino 2: Interprets sensor inputs and communicates to Arduino 1 to control boundaries of the robot's position. 1-10KΩ 5v DC E C Robot Bumpers
58 Pet Bot By Hanwen Zhao, Meifang Li Group #32
59 Components Robot Arduino Gripper with servo Infrared sensor Bluetooth Module LCD Display Objectives Person Following Mode Following the person by using the infrared sensor Phone Control Mode Fully controlled by Android Phone App Control it to grab things for you













60 Components/Block Diagram LCD Display Servo/Gripper Arduino Mega Android Phone App HC-05 Bluetooth Robot Infrared Sensor
Electronics Design Laboratory Lecture #10. ECEN 2270 Electronics Design Laboratory
 Electronics Design Laboratory Lecture #10 Electronics Design Laboratory 1 Lessons from Experiment 4 Code debugging: use print statements and serial monitor window Circuit debugging: Re check operation
Electronics Design Laboratory Lecture #10 Electronics Design Laboratory 1 Lessons from Experiment 4 Code debugging: use print statements and serial monitor window Circuit debugging: Re check operation
GetTutorialized Workshops Brochure-2017
 GetTutorialized Workshops Brochure-2017 Internet of Things with Arduino Workshop course Content: 1. Introduction to Internet of Things 2. Introduction to Microcontrollers and Microprocessors 3. Microcontrollers
GetTutorialized Workshops Brochure-2017 Internet of Things with Arduino Workshop course Content: 1. Introduction to Internet of Things 2. Introduction to Microcontrollers and Microprocessors 3. Microcontrollers
Electronics Design Laboratory Lecture #11. ECEN 2270 Electronics Design Laboratory
 Electronics Design Laboratory Lecture # ECEN 7 Electronics Design Laboratory Project Must rely on fully functional Lab circuits, Lab circuit is optional Can re do wireless or replace it with a different
Electronics Design Laboratory Lecture # ECEN 7 Electronics Design Laboratory Project Must rely on fully functional Lab circuits, Lab circuit is optional Can re do wireless or replace it with a different
DE1.3 Electronics 1. Tips on Team Projects
 DE1.3 Electronics 1 Tips on Team Projects To help you progress with the team project, I have prepared this documents to provide extra instructions that you should find helpful. 1. How can I drive TWO motors
DE1.3 Electronics 1 Tips on Team Projects To help you progress with the team project, I have prepared this documents to provide extra instructions that you should find helpful. 1. How can I drive TWO motors
A Model Based Approach for Human Recognition and Reception by Robot
 16 MHz ARDUINO A Model Based Approach for Human Recognition and Reception by Robot Prof. R. Sunitha Department Of ECE, N.R.I Institute Of Technology, J.N.T University, Kakinada, India. V. Sai Krishna,
16 MHz ARDUINO A Model Based Approach for Human Recognition and Reception by Robot Prof. R. Sunitha Department Of ECE, N.R.I Institute Of Technology, J.N.T University, Kakinada, India. V. Sai Krishna,
Walle. Members: Sebastian Hening. Amir Pourshafiee. Behnam Zohoor CMPE 118/L. Introduction to Mechatronics. Professor: Gabriel H.
 Walle Members: Sebastian Hening Amir Pourshafiee Behnam Zohoor CMPE 118/L Introduction to Mechatronics Professor: Gabriel H. Elkaim March 19, 2012 Page 2 Introduction: In this report, we will explain the
Walle Members: Sebastian Hening Amir Pourshafiee Behnam Zohoor CMPE 118/L Introduction to Mechatronics Professor: Gabriel H. Elkaim March 19, 2012 Page 2 Introduction: In this report, we will explain the
Instrument Cluster Display. Grant Scott III Erin Lawler Mike Carlson
 Instrument Cluster Display Grant Scott III Erin Lawler Mike Carlson ECE 570 December 4 th, 2014 Presentation Outline Introduction and Motivation Features Temperature Sensing LCD Display Fahrenheit/Celsius
Instrument Cluster Display Grant Scott III Erin Lawler Mike Carlson ECE 570 December 4 th, 2014 Presentation Outline Introduction and Motivation Features Temperature Sensing LCD Display Fahrenheit/Celsius
Shock Sensor Module This module is digital shock sensor. It will output a high level signal when it detects a shock event.
 Item Picture Description KY001: Temperature This module measures the temperature and reports it through the 1-wire bus digitally to the Arduino. DS18B20 (https://s3.amazonaws.com/linksprite/arduino_kits/advanced_sensors_kit/ds18b20.pdf)
Item Picture Description KY001: Temperature This module measures the temperature and reports it through the 1-wire bus digitally to the Arduino. DS18B20 (https://s3.amazonaws.com/linksprite/arduino_kits/advanced_sensors_kit/ds18b20.pdf)
CEEN Bot Lab Design A SENIOR THESIS PROPOSAL
 CEEN Bot Lab Design by Deborah Duran (EENG) Kenneth Townsend (EENG) A SENIOR THESIS PROPOSAL Presented to the Faculty of The Computer and Electronics Engineering Department In Partial Fulfillment of Requirements
CEEN Bot Lab Design by Deborah Duran (EENG) Kenneth Townsend (EENG) A SENIOR THESIS PROPOSAL Presented to the Faculty of The Computer and Electronics Engineering Department In Partial Fulfillment of Requirements
ECE 511: FINAL PROJECT REPORT GROUP 7 MSP430 TANK
 ECE 511: FINAL PROJECT REPORT GROUP 7 MSP430 TANK Team Members: Andrew Blanford Matthew Drummond Krishnaveni Das Dheeraj Reddy 1 Abstract: The goal of the project was to build an interactive and mobile
ECE 511: FINAL PROJECT REPORT GROUP 7 MSP430 TANK Team Members: Andrew Blanford Matthew Drummond Krishnaveni Das Dheeraj Reddy 1 Abstract: The goal of the project was to build an interactive and mobile
Robotic Development Kit. Powered using ATMEL technology
 Robotic Development Kit Powered using ATMEL technology Index 1. System overview 2. Technology overview 3. Individual dev-kit components I. Robot II. Remote III. IR-Pod IV. Base-Station V. RFID 4. Robonii
Robotic Development Kit Powered using ATMEL technology Index 1. System overview 2. Technology overview 3. Individual dev-kit components I. Robot II. Remote III. IR-Pod IV. Base-Station V. RFID 4. Robonii
LaserPING Rangefinder Module (#28041)
") Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical:support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical:support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Sensorkit X40. You can find code-examples and software on our website
 Sensorkit X40 You can find code-examples and software on our website www.joy-it.net/sensorkit/ Dear customer, thank you for purchasing our product. Please find our instructions below: Pin-Assignment The
Sensorkit X40 You can find code-examples and software on our website www.joy-it.net/sensorkit/ Dear customer, thank you for purchasing our product. Please find our instructions below: Pin-Assignment The
ECE 445 Spring 2017 Autonomous Trash Can. Group #85: Eshwar Cheekati, Michael Gao, Aditya Sule
 ECE 445 Spring 27 Autonomous Trash Can Group #85: Eshwar Cheekati, Michael Gao, Aditya Sule Introduction High amount of waste generated Poor communication/trash management -> smelly odors Need for reminder
ECE 445 Spring 27 Autonomous Trash Can Group #85: Eshwar Cheekati, Michael Gao, Aditya Sule Introduction High amount of waste generated Poor communication/trash management -> smelly odors Need for reminder
IMDL Fall Final Report
 IMDL Fall 2014 Final Report Designer: Jacob Easterling Robot Name: Clean Sweep Course Number: EEL 4665 Instructors: Dr. Arroyo Dr. Schwartz Dr. Diaz Teaching Assistants: Andy Gray Nick Cox C l e a n S
IMDL Fall 2014 Final Report Designer: Jacob Easterling Robot Name: Clean Sweep Course Number: EEL 4665 Instructors: Dr. Arroyo Dr. Schwartz Dr. Diaz Teaching Assistants: Andy Gray Nick Cox C l e a n S
Advanced Mechatronics 1 st Mini Project. Remote Control Car. Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014
 Advanced Mechatronics 1 st Mini Project Remote Control Car Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014 Remote Control Car Manual Control with the remote and direction buttons Automatic
Advanced Mechatronics 1 st Mini Project Remote Control Car Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014 Remote Control Car Manual Control with the remote and direction buttons Automatic
Distance Measurement of an Object by using Ultrasonic Sensors with Arduino and GSM Module
 IJSTE - International Journal of Science Technology & Engineering Volume 4 Issue 11 May 2018 ISSN (online): 2349-784X Distance Measurement of an Object by using Ultrasonic Sensors with Arduino and GSM
IJSTE - International Journal of Science Technology & Engineering Volume 4 Issue 11 May 2018 ISSN (online): 2349-784X Distance Measurement of an Object by using Ultrasonic Sensors with Arduino and GSM
LDOR: Laser Directed Object Retrieving Robot. Final Report
 University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory LDOR: Laser Directed Object Retrieving Robot Final Report 4/22/08 Mike Arms TA: Mike
University of Florida Department of Electrical and Computer Engineering EEL 5666 Intelligent Machines Design Laboratory LDOR: Laser Directed Object Retrieving Robot Final Report 4/22/08 Mike Arms TA: Mike
PCB & Circuit Designing (Summer Training Program) 6 Weeks/ 45 Days PRESENTED BY
 6 Weeks/ 45 Days PRESENTED BY") PCB & Circuit Designing (Summer Training Program) 6 Weeks/ 45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: D-66, First Floor, Sector- 07, Noida, UP Contact us: Email: stp@robospecies.com
PCB & Circuit Designing (Summer Training Program) 6 Weeks/ 45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: D-66, First Floor, Sector- 07, Noida, UP Contact us: Email: stp@robospecies.com
VOICE CONTROLLED ROBOT WITH REAL TIME BARRIER DETECTION AND AVERTING
 VOICE CONTROLLED ROBOT WITH REAL TIME BARRIER DETECTION AND AVERTING P.NARENDRA ILAYA PALLAVAN 1, S.HARISH 2, C.DHACHINAMOORTHI 3 1Assistant Professor, EIE Department, Bannari Amman Institute of Technology,
VOICE CONTROLLED ROBOT WITH REAL TIME BARRIER DETECTION AND AVERTING P.NARENDRA ILAYA PALLAVAN 1, S.HARISH 2, C.DHACHINAMOORTHI 3 1Assistant Professor, EIE Department, Bannari Amman Institute of Technology,
Robotics & Embedded Systems (Summer Training Program) 4 Weeks/30 Days
 4 Weeks/30 Days") (Summer Training Program) 4 Weeks/30 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: D-66, First Floor, Sector- 07, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com
(Summer Training Program) 4 Weeks/30 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: D-66, First Floor, Sector- 07, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com
Internet of Things (Winter Training Program) 6 Weeks/45 Days
 6 Weeks/45 Days") (Winter Training Program) 6 Weeks/45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53g, Sec- 11, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com Office: +91-120-4245860
(Winter Training Program) 6 Weeks/45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53g, Sec- 11, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com Office: +91-120-4245860
Embedded Systems & Robotics (Winter Training Program) 6 Weeks/45 Days
 6 Weeks/45 Days") Embedded Systems & Robotics (Winter Training Program) 6 Weeks/45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53G, Sector-11, Noida-201301, U.P. Contact us: Email: stp@robospecies.com
Embedded Systems & Robotics (Winter Training Program) 6 Weeks/45 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53G, Sector-11, Noida-201301, U.P. Contact us: Email: stp@robospecies.com
Rangefinder Servo and LED Controller Board Hyperdyne Labs, 2001
 Rangefinder Servo and LED Controller Board Hyperdyne Labs, 2001 http://www.hyperdynelabs.com *** DO NOT HOOK UP THE SERVO INCORRECTLY. READ BELOW FIRST *** Overview The rangefinder servo and LED board
Rangefinder Servo and LED Controller Board Hyperdyne Labs, 2001 http://www.hyperdynelabs.com *** DO NOT HOOK UP THE SERVO INCORRECTLY. READ BELOW FIRST *** Overview The rangefinder servo and LED board
Devantech SRF04 Ultra-Sonic Ranger Finder Cornerstone Electronics Technology and Robotics II
 Devantech SRF04 Ultra-Sonic Ranger Finder Cornerstone Electronics Technology and Robotics II Administration: o Prayer PicBasic Pro Programs Used in This Lesson: o General PicBasic Pro Program Listing:
Devantech SRF04 Ultra-Sonic Ranger Finder Cornerstone Electronics Technology and Robotics II Administration: o Prayer PicBasic Pro Programs Used in This Lesson: o General PicBasic Pro Program Listing:
Training Schedule. Robotic System Design using Arduino Platform
 Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
A Simple Design of Clean Robot
 Journal of Computing and Electronic Information Management ISSN: 2413-1660 A Simple Design of Clean Robot Huichao Wu 1, a, Daofang Chen 2, Yunpeng Yin 3 1 College of Optoelectronic Engineering, Chongqing
Journal of Computing and Electronic Information Management ISSN: 2413-1660 A Simple Design of Clean Robot Huichao Wu 1, a, Daofang Chen 2, Yunpeng Yin 3 1 College of Optoelectronic Engineering, Chongqing
Make: Sensors. Tero Karvinen, Kimmo Karvinen, and Ville Valtokari. (Hi MAKER MEDIA SEBASTOPOL. CA
 Make: Sensors Tero Karvinen, Kimmo Karvinen, and Ville Valtokari (Hi MAKER MEDIA SEBASTOPOL. CA Table of Contents Preface xi 1. Raspberry Pi 1 Raspberry Pi from Zero to First Boot 2 Extract NOOBS*.zip
Make: Sensors Tero Karvinen, Kimmo Karvinen, and Ville Valtokari (Hi MAKER MEDIA SEBASTOPOL. CA Table of Contents Preface xi 1. Raspberry Pi 1 Raspberry Pi from Zero to First Boot 2 Extract NOOBS*.zip
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Voice Guided Military Robot for Defence Application
 IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 11 April 2016 ISSN (online): 2349-6010 Voice Guided Military Robot for Defence Application Palak N. Patel Minal
IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 11 April 2016 ISSN (online): 2349-6010 Voice Guided Military Robot for Defence Application Palak N. Patel Minal
OBSTACLE EVADING ULTRASONIC ROBOT. Aaron Hunter Eric Whitestone Joel Chenette Anne-Marie Cressin
 OBSTACLE EVADING ULTRASONIC ROBOT Aaron Hunter Eric Whitestone Joel Chenette Anne-Marie Cressin ECE 511 - Fall 2011 1 Abstract The purpose of this project is to demonstrate how simple algorithms can produce
OBSTACLE EVADING ULTRASONIC ROBOT Aaron Hunter Eric Whitestone Joel Chenette Anne-Marie Cressin ECE 511 - Fall 2011 1 Abstract The purpose of this project is to demonstrate how simple algorithms can produce
Today s Menu. Near Infrared Sensors
 Today s Menu Near Infrared Sensors CdS Cells Programming Simple Behaviors 1 Near-Infrared Sensors Infrared (IR) Sensors > Near-infrared proximity sensors are called IRs for short. These devices are insensitive
Today s Menu Near Infrared Sensors CdS Cells Programming Simple Behaviors 1 Near-Infrared Sensors Infrared (IR) Sensors > Near-infrared proximity sensors are called IRs for short. These devices are insensitive
Cypress Robot Kit Final Report
 Cypress Robot Kit Final Report Team Members: Alvin Wu Byung Joo Park Todd Nguyen Teaching Assistant: Katherine O Kane ECE 445 Group #5 December 7, 2016 Abstract The Programmable System-on-Chip (PSoC) made
Cypress Robot Kit Final Report Team Members: Alvin Wu Byung Joo Park Todd Nguyen Teaching Assistant: Katherine O Kane ECE 445 Group #5 December 7, 2016 Abstract The Programmable System-on-Chip (PSoC) made
Solar Powered Obstacle Avoiding Robot
 Solar Powered Obstacle Avoiding Robot S.S. Subashka Ramesh 1, Tarun Keshri 2, Sakshi Singh 3, Aastha Sharma 4 1 Asst. professor, SRM University, Chennai, Tamil Nadu, India. 2, 3, 4 B.Tech Student, SRM
Solar Powered Obstacle Avoiding Robot S.S. Subashka Ramesh 1, Tarun Keshri 2, Sakshi Singh 3, Aastha Sharma 4 1 Asst. professor, SRM University, Chennai, Tamil Nadu, India. 2, 3, 4 B.Tech Student, SRM
The Datasheet and Interfacing EE3376
 The Datasheet and Interfacing EE3376 MSP430 Datasheet Modes of the MSP430 Active Mode (this class) LPM0 (CPU asleep) LPM3 (only ACLK on) LPM4 (sleep mode) 0 0 0 0 250uA 0 0 0 1 35 ua 1 1 0 1 1 ua 1 1 1
The Datasheet and Interfacing EE3376 MSP430 Datasheet Modes of the MSP430 Active Mode (this class) LPM0 (CPU asleep) LPM3 (only ACLK on) LPM4 (sleep mode) 0 0 0 0 250uA 0 0 0 1 35 ua 1 1 0 1 1 ua 1 1 1
Two Hour Robot. Lets build a Robot.
 Lets build a Robot. Our robot will use an ultrasonic sensor and servos to navigate it s way around a maze. We will be making 2 voltage circuits : A 5 Volt for our ultrasonic sensor, sound and lights powered
Lets build a Robot. Our robot will use an ultrasonic sensor and servos to navigate it s way around a maze. We will be making 2 voltage circuits : A 5 Volt for our ultrasonic sensor, sound and lights powered
Critical Design Review: M.A.D. Dog. Nicholas Maddy Timothy Dayley Kevin Liou
 Critical Design Review: M.A.D. Dog Nicholas Maddy Timothy Dayley Kevin Liou Project Description M.A.D. Dog is an autonomous robot with the following functionalities: - Map and patrol an office environment.
Critical Design Review: M.A.D. Dog Nicholas Maddy Timothy Dayley Kevin Liou Project Description M.A.D. Dog is an autonomous robot with the following functionalities: - Map and patrol an office environment.
HAW-Arduino. Sensors and Arduino F. Schubert HAW - Arduino 1
 HAW-Arduino Sensors and Arduino 14.10.2010 F. Schubert HAW - Arduino 1 Content of the USB-Stick PDF-File of this script Arduino-software Source-codes Helpful links 14.10.2010 HAW - Arduino 2 Report for
HAW-Arduino Sensors and Arduino 14.10.2010 F. Schubert HAW - Arduino 1 Content of the USB-Stick PDF-File of this script Arduino-software Source-codes Helpful links 14.10.2010 HAW - Arduino 2 Report for
Measuring Distance Using Sound
 Measuring Distance Using Sound Distance can be measured in various ways: directly, using a ruler or measuring tape, or indirectly, using radio or sound waves. The indirect method measures another variable
Measuring Distance Using Sound Distance can be measured in various ways: directly, using a ruler or measuring tape, or indirectly, using radio or sound waves. The indirect method measures another variable
Workshops Elisava Introduction to programming and electronics (Scratch & Arduino)
") Workshops Elisava 2011 Introduction to programming and electronics (Scratch & Arduino) What is programming? Make an algorithm to do something in a specific language programming. Algorithm: a procedure
Workshops Elisava 2011 Introduction to programming and electronics (Scratch & Arduino) What is programming? Make an algorithm to do something in a specific language programming. Algorithm: a procedure
ZX Distance and Gesture Sensor Hookup Guide
 Page 1 of 13 ZX Distance and Gesture Sensor Hookup Guide Introduction The ZX Distance and Gesture Sensor is a collaboration product with XYZ Interactive. The very smart people at XYZ Interactive have created
Page 1 of 13 ZX Distance and Gesture Sensor Hookup Guide Introduction The ZX Distance and Gesture Sensor is a collaboration product with XYZ Interactive. The very smart people at XYZ Interactive have created
International Journal for Research in Applied Science & Engineering Technology (IJRASET) DTMF Based Robot for Security Applications
 DTMF Based Robot for Security Applications") DTMF Based Robot for Security Applications N. Mohan Raju 1, M. Naga Praveen 2, A. Mansoor Vali 3, M. Amrutha 4, K. Jaya Theertha 5 1,2,3,4,5 Department of ECE, JNTUA Abstract: The main idea is to implement
DTMF Based Robot for Security Applications N. Mohan Raju 1, M. Naga Praveen 2, A. Mansoor Vali 3, M. Amrutha 4, K. Jaya Theertha 5 1,2,3,4,5 Department of ECE, JNTUA Abstract: The main idea is to implement
C++ PROGRAM FOR DRIVING OF AN AGRICOL ROBOT
 Annals of the University of Petroşani, Mechanical Engineering, 14 (2012), 11-19 11 C++ PROGRAM FOR DRIVING OF AN AGRICOL ROBOT STELIAN-VALENTIN CASAVELA 1 Abstract: This robot is projected to participate
Annals of the University of Petroşani, Mechanical Engineering, 14 (2012), 11-19 11 C++ PROGRAM FOR DRIVING OF AN AGRICOL ROBOT STELIAN-VALENTIN CASAVELA 1 Abstract: This robot is projected to participate
War Field Spying Robot With Night Vision Camera
 War Field Spying Robot With Night Vision Camera Aaruni Jha, Apoorva Singh, Ravinder Turna, Sakshi Chauhan SRMSWCET, UPTU, India Abstract With the aim of the satisfying and meeting the changing needs of
War Field Spying Robot With Night Vision Camera Aaruni Jha, Apoorva Singh, Ravinder Turna, Sakshi Chauhan SRMSWCET, UPTU, India Abstract With the aim of the satisfying and meeting the changing needs of
Wireless Technology in Robotics
 Wireless Technology in Robotics Purpose: The objective of this activity is to introduce students to the use of wireless technology to control robots. Overview: Robots can be found in most industries. Robots
Wireless Technology in Robotics Purpose: The objective of this activity is to introduce students to the use of wireless technology to control robots. Overview: Robots can be found in most industries. Robots
Roborodentia Final Report
 California Polytechnic State University, SLO College of Engineering Computer Engineering Program Roborodentia Final Report Submitted by: Zeph Nord, Mitchell Myjak, Trevor Gesell June 2018 Faculty Advisor:
California Polytechnic State University, SLO College of Engineering Computer Engineering Program Roborodentia Final Report Submitted by: Zeph Nord, Mitchell Myjak, Trevor Gesell June 2018 Faculty Advisor:
PRESENTED BY HUMANOID IIT KANPUR
 SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
MAKER: Development of Smart Mobile Robot System to Help Middle School Students Learn about Robot Perception
 Paper ID #14537 MAKER: Development of Smart Mobile Robot System to Help Middle School Students Learn about Robot Perception Dr. Sheng-Jen Tony Hsieh, Texas A&M University Dr. Sheng-Jen ( Tony ) Hsieh is
Paper ID #14537 MAKER: Development of Smart Mobile Robot System to Help Middle School Students Learn about Robot Perception Dr. Sheng-Jen Tony Hsieh, Texas A&M University Dr. Sheng-Jen ( Tony ) Hsieh is
Available online Journal of Scientific and Engineering Research, 2018, 5(4): Research Article
: Research Article") Available online www.jsaer.com, 2018, 5(4):341-349 Research Article ISSN: 2394-2630 CODEN(USA): JSERBR Arduino Based door Automation System Using Ultrasonic Sensor and Servo Motor Orji EZ*, Oleka CV, Nduanya
Available online www.jsaer.com, 2018, 5(4):341-349 Research Article ISSN: 2394-2630 CODEN(USA): JSERBR Arduino Based door Automation System Using Ultrasonic Sensor and Servo Motor Orji EZ*, Oleka CV, Nduanya
HAND GESTURE CONTROLLED ROBOT USING ARDUINO
 HAND GESTURE CONTROLLED ROBOT USING ARDUINO Vrushab Sakpal 1, Omkar Patil 2, Sagar Bhagat 3, Badar Shaikh 4, Prof.Poonam Patil 5 1,2,3,4,5 Department of Instrumentation Bharati Vidyapeeth C.O.E,Kharghar,Navi
HAND GESTURE CONTROLLED ROBOT USING ARDUINO Vrushab Sakpal 1, Omkar Patil 2, Sagar Bhagat 3, Badar Shaikh 4, Prof.Poonam Patil 5 1,2,3,4,5 Department of Instrumentation Bharati Vidyapeeth C.O.E,Kharghar,Navi
PCB & Circuit Designing
 (Summer Training Program) 4 Weeks/30 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53G, Sector-11, Noida-201301, U.P. Contact us: Email: stp@robospecies.com Website: www.robospecies.com
(Summer Training Program) 4 Weeks/30 Days PRESENTED BY RoboSpecies Technologies Pvt. Ltd. Office: W-53G, Sector-11, Noida-201301, U.P. Contact us: Email: stp@robospecies.com Website: www.robospecies.com
Boozer Cruiser. EEL Electrical Engineering Design 2 Final Design Report. April 23, The Mobile Bartending Robot.
 EEL4924 - Electrical Engineering Design 2 Final Design Report April 23, 2013 Boozer Cruiser The Mobile Bartending Robot Team Members: Mackenzie Banker Perry Fowlkes mbanker@ufl.edu perry.pfowlkes@gmail.com
EEL4924 - Electrical Engineering Design 2 Final Design Report April 23, 2013 Boozer Cruiser The Mobile Bartending Robot Team Members: Mackenzie Banker Perry Fowlkes mbanker@ufl.edu perry.pfowlkes@gmail.com
Wireless Sensor Network for Intra-Venous Fluid Level Indicator Application
 Wireless Sensor Network for Intra-Venous Fluid Level Indicator Application Abstract Wireless sensor networks use small, low-cost embedded devices for a wide range of applications such as industrial data
Wireless Sensor Network for Intra-Venous Fluid Level Indicator Application Abstract Wireless sensor networks use small, low-cost embedded devices for a wide range of applications such as industrial data
Boe-Bot robot manual
 Tallinn University of Technology Department of Computer Engineering Chair of Digital Systems Design Boe-Bot robot manual Priit Ruberg Erko Peterson Keijo Lass Tallinn 2016 Contents 1 Robot hardware description...3
Tallinn University of Technology Department of Computer Engineering Chair of Digital Systems Design Boe-Bot robot manual Priit Ruberg Erko Peterson Keijo Lass Tallinn 2016 Contents 1 Robot hardware description...3
PCB & Circuit Designing (Summer Training Program 2014)
") (Summer Training Program 2014) PRESENTED BY In association with RoboSpecies Technologies Pvt. Ltd. Office: A-90, Lower Ground Floor, Sec- 4, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com
(Summer Training Program 2014) PRESENTED BY In association with RoboSpecies Technologies Pvt. Ltd. Office: A-90, Lower Ground Floor, Sec- 4, Noida, UP Contact us: Email: stp@robospecies.com Website: www.robospecies.com
Actuators. DC Motor Servo Motor Stepper Motor. Sensors
 Actuators Sensors 2 Actuators DC Motor Servo Motor Stepper Motor Sensors 3 1. The stator generates a stationary magnetic field surrounding the rotor. 2. The rotor/armature is composed of a coil which generates
Actuators Sensors 2 Actuators DC Motor Servo Motor Stepper Motor Sensors 3 1. The stator generates a stationary magnetic field surrounding the rotor. 2. The rotor/armature is composed of a coil which generates
ECE 477 Digital Systems Senior Design Project Rev 8/09. Homework 5: Theory of Operation and Hardware Design Narrative
 ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: _ATV Group No. 3 Team Member Completing This Homework: Sebastian Hening
MULTI ROBOT COMMUNICATION AND TARGET TRACKING SYSTEM AND IMPLEMENTATION OF ROBOT USING ARDUINO
 MULTI ROBOT COMMUNICATION AND TARGET TRACKING SYSTEM AND IMPLEMENTATION OF ROBOT USING ARDUINO K. Sindhuja 1, CH. Lavanya 2 1Student, Department of ECE, GIST College, Andhra Pradesh, INDIA 2Assistant Professor,
MULTI ROBOT COMMUNICATION AND TARGET TRACKING SYSTEM AND IMPLEMENTATION OF ROBOT USING ARDUINO K. Sindhuja 1, CH. Lavanya 2 1Student, Department of ECE, GIST College, Andhra Pradesh, INDIA 2Assistant Professor,
Total Hours Registration through Website or for further details please visit (Refer Upcoming Events Section)
") Total Hours 110-150 Registration Q R Code Registration through Website or for further details please visit http://www.rknec.edu/ (Refer Upcoming Events Section) Module 1: Basics of Microprocessor & Microcontroller
Total Hours 110-150 Registration Q R Code Registration through Website or for further details please visit http://www.rknec.edu/ (Refer Upcoming Events Section) Module 1: Basics of Microprocessor & Microcontroller
Sensorkit X40. You can find code-examples and software on our website
 Sensorkit X40 You can find code-examples and software on our website www.joy-it.net/sensorkit/ Dear customer, thank you for purchasing our product. Please find our instructions below: Pin-Assignment The
Sensorkit X40 You can find code-examples and software on our website www.joy-it.net/sensorkit/ Dear customer, thank you for purchasing our product. Please find our instructions below: Pin-Assignment The
Index. n A. n B. n C. Base biasing transistor driver circuit, BCD-to-Decode IC, 44 46
 Index n A Android Droid X smartphone, 165 Arduino-based LCD controller with an improved event trigger, 182 with auto-adjust contrast control, 181 block diagram, 189, 190 circuit diagram, 187, 189 delay()
Index n A Android Droid X smartphone, 165 Arduino-based LCD controller with an improved event trigger, 182 with auto-adjust contrast control, 181 block diagram, 189, 190 circuit diagram, 187, 189 delay()
Tarocco Closed Loop Motor Controller
 Contents Safety Information... 3 Overview... 4 Features... 4 SoC for Closed Loop Control... 4 Gate Driver... 5 MOSFETs in H Bridge Configuration... 5 Device Characteristics... 6 Installation... 7 Motor
Contents Safety Information... 3 Overview... 4 Features... 4 SoC for Closed Loop Control... 4 Gate Driver... 5 MOSFETs in H Bridge Configuration... 5 Device Characteristics... 6 Installation... 7 Motor
Arduino Based Robot for Pick and Place Application
 Arduino Based Robot for Pick and Place Application Priya H. Pande Pallavi V. Saklecha Prof. Pragati D. Pawar Prof. Atul N. Shire Abstract Here, the project is designed to develop a system in which robot
Arduino Based Robot for Pick and Place Application Priya H. Pande Pallavi V. Saklecha Prof. Pragati D. Pawar Prof. Atul N. Shire Abstract Here, the project is designed to develop a system in which robot
Project Proposal. Underwater Fish 02/16/2007 Nathan Smith,
 Project Proposal Underwater Fish 02/16/2007 Nathan Smith, rahteski@gwu.edu Abstract The purpose of this project is to build a mechanical, underwater fish that can be controlled by a joystick. The fish
Project Proposal Underwater Fish 02/16/2007 Nathan Smith, rahteski@gwu.edu Abstract The purpose of this project is to build a mechanical, underwater fish that can be controlled by a joystick. The fish
Probabilistic Robotics Course. Robots and Sensors Orazio
 Probabilistic Robotics Course Robots and Sensors Orazio Giorgio Grisetti grisetti@dis.uniroma1.it Dept of Computer Control and Management Engineering Sapienza University of Rome Outline Robot Devices Overview
Probabilistic Robotics Course Robots and Sensors Orazio Giorgio Grisetti grisetti@dis.uniroma1.it Dept of Computer Control and Management Engineering Sapienza University of Rome Outline Robot Devices Overview
MRS: an Autonomous and Remote-Controlled Robotics Platform for STEM Education
 Association for Information Systems AIS Electronic Library (AISeL) SAIS 2015 Proceedings Southern (SAIS) 2015 MRS: an Autonomous and Remote-Controlled Robotics Platform for STEM Education Timothy Locke
Association for Information Systems AIS Electronic Library (AISeL) SAIS 2015 Proceedings Southern (SAIS) 2015 MRS: an Autonomous and Remote-Controlled Robotics Platform for STEM Education Timothy Locke
ESE 350 Microcontroller Laboratory Lab 5: Sensor-Actuator Lab
 ESE 350 Microcontroller Laboratory Lab 5: Sensor-Actuator Lab The purpose of this lab is to learn about sensors and use the ADC module to digitize the sensor signals. You will use the digitized signals
ESE 350 Microcontroller Laboratory Lab 5: Sensor-Actuator Lab The purpose of this lab is to learn about sensors and use the ADC module to digitize the sensor signals. You will use the digitized signals
ECE 511: MICROPROCESSORS
 ECE 511: MICROPROCESSORS A project report on SNIFFING DOG Under the guidance of Prof. Jens Peter Kaps By, Preethi Santhanam (G00767634) Ranjit Mandavalli (G00819673) Shaswath Raghavan (G00776950) Swathi
ECE 511: MICROPROCESSORS A project report on SNIFFING DOG Under the guidance of Prof. Jens Peter Kaps By, Preethi Santhanam (G00767634) Ranjit Mandavalli (G00819673) Shaswath Raghavan (G00776950) Swathi
Project Name Here CSEE 4840 Project Design Document. Thomas Chau Ben Sack Peter Tsonev
 Project Name Here CSEE 4840 Project Design Document Thomas Chau tc2165@columbia.edu Ben Sack bs2535@columbia.edu Peter Tsonev pvt2101@columbia.edu Table of contents: Introduction Page 3 Block Diagram Page
Project Name Here CSEE 4840 Project Design Document Thomas Chau tc2165@columbia.edu Ben Sack bs2535@columbia.edu Peter Tsonev pvt2101@columbia.edu Table of contents: Introduction Page 3 Block Diagram Page
University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT
 University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT Brandon J. Patton Instructors: Drs. Antonio Arroyo and Eric Schwartz
University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT Brandon J. Patton Instructors: Drs. Antonio Arroyo and Eric Schwartz
EGG 101L INTRODUCTION TO ENGINEERING EXPERIENCE
 EGG 101L INTRODUCTION TO ENGINEERING EXPERIENCE LABORATORY 7: IR SENSORS AND DISTANCE DEPARTMENT OF ELECTRICAL AND COMPUTER ENGINEERING UNIVERSITY OF NEVADA, LAS VEGAS GOAL: This section will introduce
EGG 101L INTRODUCTION TO ENGINEERING EXPERIENCE LABORATORY 7: IR SENSORS AND DISTANCE DEPARTMENT OF ELECTRICAL AND COMPUTER ENGINEERING UNIVERSITY OF NEVADA, LAS VEGAS GOAL: This section will introduce
Lab 5: Inverted Pendulum PID Control
 Lab 5: Inverted Pendulum PID Control In this lab we will be learning about PID (Proportional Integral Derivative) control and using it to keep an inverted pendulum system upright. We chose an inverted
Lab 5: Inverted Pendulum PID Control In this lab we will be learning about PID (Proportional Integral Derivative) control and using it to keep an inverted pendulum system upright. We chose an inverted
DC motor control using arduino
 DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
Hardware Implementation of an Explorer Bot Using XBEE & GSM Technology
 Volume 118 No. 20 2018, 4337-4342 ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Hardware Implementation of an Explorer Bot Using XBEE & GSM Technology M. V. Sai Srinivas, K. Yeswanth,
Volume 118 No. 20 2018, 4337-4342 ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu Hardware Implementation of an Explorer Bot Using XBEE & GSM Technology M. V. Sai Srinivas, K. Yeswanth,
Mars Rover: System Block Diagram. November 19, By: Dan Dunn Colin Shea Eric Spiller. Advisors: Dr. Huggins Dr. Malinowski Mr.
 Mars Rover: System Block Diagram November 19, 2002 By: Dan Dunn Colin Shea Eric Spiller Advisors: Dr. Huggins Dr. Malinowski Mr. Gutschlag System Block Diagram An overall system block diagram, shown in
Mars Rover: System Block Diagram November 19, 2002 By: Dan Dunn Colin Shea Eric Spiller Advisors: Dr. Huggins Dr. Malinowski Mr. Gutschlag System Block Diagram An overall system block diagram, shown in
Emergent Behavior Robot
 Emergent Behavior Robot Functional Description and Complete System Block Diagram By: Andrew Elliott & Nick Hanauer Project Advisor: Joel Schipper December 6, 2009 Introduction The objective of this project
Emergent Behavior Robot Functional Description and Complete System Block Diagram By: Andrew Elliott & Nick Hanauer Project Advisor: Joel Schipper December 6, 2009 Introduction The objective of this project
Controlling Obstacle Avoiding And Live Streaming Robot Using Chronos Watch
 Controlling Obstacle Avoiding And Live Streaming Robot Using Chronos Watch Mr. T. P. Kausalya Nandan, S. N. Anvesh Kumar, M. Bhargava, P. Chandrakanth, M. Sairani Abstract In today s world working on robots
Controlling Obstacle Avoiding And Live Streaming Robot Using Chronos Watch Mr. T. P. Kausalya Nandan, S. N. Anvesh Kumar, M. Bhargava, P. Chandrakanth, M. Sairani Abstract In today s world working on robots
E11 Lecture 11: Sensors & Actuators. Profs. David Money Harris & Sarah Harris Fall 2011
 E11 Lecture 11: Sensors & Actuators Profs. David Money Harris & Sarah Harris Fall 2011 Outline Actuators DC Motor Servo Motor Stepper Motor Sensors Phototransistor Reflectance Sensor IR Distance Sensor
E11 Lecture 11: Sensors & Actuators Profs. David Money Harris & Sarah Harris Fall 2011 Outline Actuators DC Motor Servo Motor Stepper Motor Sensors Phototransistor Reflectance Sensor IR Distance Sensor
Mechatronics Project Report
 Mechatronics Project Report Introduction Robotic fish are utilized in the Dynamic Systems Laboratory in order to study and model schooling in fish populations, with the goal of being able to manage aquatic
Mechatronics Project Report Introduction Robotic fish are utilized in the Dynamic Systems Laboratory in order to study and model schooling in fish populations, with the goal of being able to manage aquatic
EEL5666C IMDL Spring 2006 Student: Andrew Joseph. *Alarm-o-bot*
 EEL5666C IMDL Spring 2006 Student: Andrew Joseph *Alarm-o-bot* TAs: Adam Barnett, Sara Keen Instructor: A.A. Arroyo Final Report April 25, 2006 Table of Contents Abstract 3 Executive Summary 3 Introduction
EEL5666C IMDL Spring 2006 Student: Andrew Joseph *Alarm-o-bot* TAs: Adam Barnett, Sara Keen Instructor: A.A. Arroyo Final Report April 25, 2006 Table of Contents Abstract 3 Executive Summary 3 Introduction
An Arduino-based DCC Accessory Decoder for Model Railroad Turnouts. Eric Thorstenson 11/1/17
 An Arduino-based DCC Accessory Decoder for Model Railroad Turnouts Eric Thorstenson 11/1/17 Introduction Earlier this year, I decided to develop an Arduino-based DCC accessory decoder for model railroad
An Arduino-based DCC Accessory Decoder for Model Railroad Turnouts Eric Thorstenson 11/1/17 Introduction Earlier this year, I decided to develop an Arduino-based DCC accessory decoder for model railroad
νµθωερτψυιοπασδφγηϕκλζξχϖβνµθωερτ ψυιοπασδφγηϕκλζξχϖβνµθωερτψυιοπα σδφγηϕκλζξχϖβνµθωερτψυιοπασδφγηϕκ χϖβνµθωερτψυιοπασδφγηϕκλζξχϖβνµθ
 θωερτψυιοπασδφγηϕκλζξχϖβνµθωερτψ υιοπασδφγηϕκλζξχϖβνµθωερτψυιοπασδ φγηϕκλζξχϖβνµθωερτψυιοπασδφγηϕκλζ ξχϖβνµθωερτψυιοπασδφγηϕκλζξχϖβνµ EE 331 Design Project Final Report θωερτψυιοπασδφγηϕκλζξχϖβνµθωερτψ
θωερτψυιοπασδφγηϕκλζξχϖβνµθωερτψ υιοπασδφγηϕκλζξχϖβνµθωερτψυιοπασδ φγηϕκλζξχϖβνµθωερτψυιοπασδφγηϕκλζ ξχϖβνµθωερτψυιοπασδφγηϕκλζξχϖβνµ EE 331 Design Project Final Report θωερτψυιοπασδφγηϕκλζξχϖβνµθωερτψ
Mapping device with wireless communication
 University of Arkansas, Fayetteville ScholarWorks@UARK Electrical Engineering Undergraduate Honors Theses Electrical Engineering 12-2011 Mapping device with wireless communication Xiangyu Liu University
University of Arkansas, Fayetteville ScholarWorks@UARK Electrical Engineering Undergraduate Honors Theses Electrical Engineering 12-2011 Mapping device with wireless communication Xiangyu Liu University
FINAL DESIGN REPORT. Dodge This! DODGERS: Cristobal Rivero Derek Fairbanks 4/21/2009
 FINAL DESIGN REPORT Dodge This! DODGERS: Cristobal Rivero Derek Fairbanks 4/21/2009 Abstract: Our project is to develop an automatic dodge ball game. It consists of an infrared video camera, computer,
FINAL DESIGN REPORT Dodge This! DODGERS: Cristobal Rivero Derek Fairbanks 4/21/2009 Abstract: Our project is to develop an automatic dodge ball game. It consists of an infrared video camera, computer,
Introduction. Theory of Operation
 Mohan Rokkam Page 1 12/15/2004 Introduction The goal of our project is to design and build an automated shopping cart that follows a shopper around. Ultrasonic waves are used due to the slower speed of
Mohan Rokkam Page 1 12/15/2004 Introduction The goal of our project is to design and build an automated shopping cart that follows a shopper around. Ultrasonic waves are used due to the slower speed of
Pi Servo Hat Hookup Guide
 Page 1 of 10 Pi Servo Hat Hookup Guide Introduction The SparkFun Pi Servo Hat allows your Raspberry Pi to control up to 16 servo motors via I2C connection. This saves GPIO and lets you use the onboard
Page 1 of 10 Pi Servo Hat Hookup Guide Introduction The SparkFun Pi Servo Hat allows your Raspberry Pi to control up to 16 servo motors via I2C connection. This saves GPIO and lets you use the onboard
III. MATERIAL AND COMPONENTS USED
 Prototype Development of a Smartphone- Controlled Robotic Vehicle with Pick- Place Capability Dheeraj Sharma Electronics and communication department Gian Jyoti Institute Of Engineering And Technology,
Prototype Development of a Smartphone- Controlled Robotic Vehicle with Pick- Place Capability Dheeraj Sharma Electronics and communication department Gian Jyoti Institute Of Engineering And Technology,
Published by: PIONEER RESEARCH & DEVELOPMENT GROUP ( 1
 Biomimetic Based Interactive Master Slave Robots T.Anushalalitha 1, Anupa.N 2, Jahnavi.B 3, Keerthana.K 4, Shridevi.S.C 5 Dept. of Telecommunication, BMSCE Bangalore, India. Abstract The system involves
Biomimetic Based Interactive Master Slave Robots T.Anushalalitha 1, Anupa.N 2, Jahnavi.B 3, Keerthana.K 4, Shridevi.S.C 5 Dept. of Telecommunication, BMSCE Bangalore, India. Abstract The system involves
Electronic Components
 Electronic Components Arduino Uno Arduino Uno is a microcontroller (a simple computer), it has no way to interact. Building circuits and interface is necessary. Battery Snap Battery Snap is used to connect
Electronic Components Arduino Uno Arduino Uno is a microcontroller (a simple computer), it has no way to interact. Building circuits and interface is necessary. Battery Snap Battery Snap is used to connect
Abstract Wireless technology is an integral part of
 The Wi-Fi Seeker Christina Leichtenschlag, Adrian Morgan, Jimmy Wong Department of Electrical Engineering and Computer Science, University of Central Florida, Orlando, Florida, 32816-2450 Abstract Wireless
The Wi-Fi Seeker Christina Leichtenschlag, Adrian Morgan, Jimmy Wong Department of Electrical Engineering and Computer Science, University of Central Florida, Orlando, Florida, 32816-2450 Abstract Wireless
Designing an Embedded System for Autonomous Building Map Exploration Robot
 Designing an Embedded System for Autonomous Building Map Exploration Robot V. Ramya Assist. Prof, Dept of CSE Annamalai University Annamalai Nagar T. Akilan Dept. of CSE Annamalai University Annamalai
Designing an Embedded System for Autonomous Building Map Exploration Robot V. Ramya Assist. Prof, Dept of CSE Annamalai University Annamalai Nagar T. Akilan Dept. of CSE Annamalai University Annamalai
Automatic Docking System with Recharging and Battery Replacement for Surveillance Robot
 International Journal of Electronics and Computer Science Engineering 1148 Available Online at www.ijecse.org ISSN- 2277-1956 Automatic Docking System with Recharging and Battery Replacement for Surveillance
International Journal of Electronics and Computer Science Engineering 1148 Available Online at www.ijecse.org ISSN- 2277-1956 Automatic Docking System with Recharging and Battery Replacement for Surveillance
Devastator Tank Mobile Platform with Edison SKU:ROB0125
 Devastator Tank Mobile Platform with Edison SKU:ROB0125 From Robot Wiki Contents 1 Introduction 2 Tutorial 2.1 Chapter 2: Run! Devastator! 2.2 Chapter 3: Expansion Modules 2.3 Chapter 4: Build The Devastator
Devastator Tank Mobile Platform with Edison SKU:ROB0125 From Robot Wiki Contents 1 Introduction 2 Tutorial 2.1 Chapter 2: Run! Devastator! 2.2 Chapter 3: Expansion Modules 2.3 Chapter 4: Build The Devastator
ROBOTICS & IOT. Workshop Module
 ROBOTICS & IOT Workshop Module CURRICULUM STRUCTURE DURATION : 2 day (16 hours) Session 1 Let's Learn Embedded System & Robotics Description Under this topic, we will discuss basics and give brief idea
ROBOTICS & IOT Workshop Module CURRICULUM STRUCTURE DURATION : 2 day (16 hours) Session 1 Let's Learn Embedded System & Robotics Description Under this topic, we will discuss basics and give brief idea
ROBOTICS & IOT. Workshop Module
 ROBOTICS & IOT Workshop Module CURRICULUM STRUCTURE DURATION : 2 day (16 hours) Session 1 Let's Learn Embedded System & Robotics Description Under this topic, we will discuss basics and give brief idea
ROBOTICS & IOT Workshop Module CURRICULUM STRUCTURE DURATION : 2 day (16 hours) Session 1 Let's Learn Embedded System & Robotics Description Under this topic, we will discuss basics and give brief idea
Bohunt School (Wokingham) Internet of Things (IoT) and Node-RED
 Internet of Things (IoT) and Node-RED") This practical session should be a bit of fun for you. It involves creating a distance sensor node using the SRF05 ultrasonic device. How the SRF05 works Here s a photo of the SRF05. The silver metal cans
This practical session should be a bit of fun for you. It involves creating a distance sensor node using the SRF05 ultrasonic device. How the SRF05 works Here s a photo of the SRF05. The silver metal cans
Object Detection for Collision Avoidance in ITS
 Available online www.ejaet.com European Journal of Advances in Engineering and Technology, 2016, 3(5): 29-35 Research Article ISSN: 2394-658X Object Detection for Collision Avoidance in ITS Rupojyoti Kar
Available online www.ejaet.com European Journal of Advances in Engineering and Technology, 2016, 3(5): 29-35 Research Article ISSN: 2394-658X Object Detection for Collision Avoidance in ITS Rupojyoti Kar
SCHOOL OF TECHNOLOGY AND PUBLIC MANAGEMENT ENGINEERING TECHNOLOGY DEPARTMENT
 SCHOOL OF TECHNOLOGY AND PUBLIC MANAGEMENT ENGINEERING TECHNOLOGY DEPARTMENT Course ENGT 3260 Microcontrollers Summer III 2015 Instructor: Dr. Maged Mikhail Project Report Submitted By: Nicole Kirch 7/10/2015
SCHOOL OF TECHNOLOGY AND PUBLIC MANAGEMENT ENGINEERING TECHNOLOGY DEPARTMENT Course ENGT 3260 Microcontrollers Summer III 2015 Instructor: Dr. Maged Mikhail Project Report Submitted By: Nicole Kirch 7/10/2015
Automobile Prototype Servo Control
 IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 10 March 2016 ISSN (online): 2349-6010 Automobile Prototype Servo Control Mr. Linford William Fernandes Don Bosco
IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 10 March 2016 ISSN (online): 2349-6010 Automobile Prototype Servo Control Mr. Linford William Fernandes Don Bosco
RPLIDAR A3. Introduction and Datasheet. Low Cost 360 Degree Laser Range Scanner. Model: A3M1. Shanghai Slamtec.Co.,Ltd rev.1.
 www.slamtec.com RPLIDAR A3 2018-01-24 rev.1.0 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A3M1 OPTMAG 16K Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION... 3
www.slamtec.com RPLIDAR A3 2018-01-24 rev.1.0 Low Cost 360 Degree Laser Range Scanner Introduction and Datasheet Model: A3M1 OPTMAG 16K Shanghai Slamtec.Co.,Ltd Contents CONTENTS... 1 INTRODUCTION... 3