An Initial Exploration of a Multi-Sensory Design Space: Tactile Support for Walking in Immersive Virtual Environments
|
|
|
- Gervase Lyons
- 5 years ago
- Views:
Transcription
1 An Initial Exploration of a Multi-Sensory Design Space: Tactile Support for Walking in Immersive Virtual Environments by Mi Feng A Thesis Submitted to the Faculty of the WORCESTER POLYTECHNIC INSTITUTE in partial fulfillment of the requirements for the Degree of Master of Science in Computer Science January 2016 APPROVED: Professor Robert W. Lindeman, Thesis Advisor Professor Mark Claypool, Thesis Reader Professor Craig E. Wills, Head of Department
2 Abstract Multi-sensory feedback can potentially improve user experience and performance in virtual environments. As it is complicated to study the effect of multi-sensory feedback as a single factor, we created a design space with these diverse cues, categorizing them into an appropriate granularity based on their origin and use cases. To examine the effects of tactile cues during non-fatiguing walking in immersive virtual environments, we selected certain tactile cues from the design space, movement wind, directional wind and footstep vibration, and another cue, footstep sounds, and investigated their influence and interaction with each other in more detail. We developed a virtual reality system with non-fatiguing walking interaction and low-latency, multi-sensory feedback, and then used it to conduct two successive experiments measuring user experience and performance through a triangle-completion task. We noticed some effects due to the addition of footstep vibration on task performance, and saw significant improvement due to the added tactile cues in reported user experience. ii
3 Acknowledgements I would like to express my deepest gratitude to my advisor, Professor Robert W. Lindeman, who exposed me to the wonderful hardware world in virtual reality, instructed me throughout the development of the system, and gave me many valuable advices on research exploration as well as programming. I would like to thank my thesis reader, Mark Claypool, who listened to my research work during GRIE poster symposium and gave me detailed and helpful comments, suggestions in depth, as well as encouragement. I would like to thank the post-doctoral fellow in HIVE lab, Arindam Dey, from whom I learnt the whole process about experimental design, data analysis and discussion. He kept encouraging me during my very first user study. I would like to thank the forty participants for their voluntary participation in our two experiments. Finally, I would like to thank my parents, who supported me overseas during the two years, and taught me problem-solving skills, from which I could benefit throughout life. iii
4 Table of Contents Abstract... ii Acknowledgements... iii List of Figures... vi List of Tables... viii 1 Introduction Design Space of Multi-Sensory Cues Our Work Contributions Related Work Selected Secondary Cues in VR Wind in VR Vibrotactile-enhanced Footstep Simulations in VR Path Integration in VR System Implementation Physical Layout Wind Module Hardware and Firmware Software Floor Vibration Module Hardware Software Empirical Study Experimental Task Experiment 1: Movement Wind, Floor Vibration and Sound Experimental Design Procedure Measures iv
5 4.2.4 Participants Path Visualization Results Discussion Follow-up Experiment Experimental Design Participants Results Discussion Conclusion References Appendix A Communication Protocol 48 Appendix B Grouped Path Visualizations 50 v
6 List of Figures Figure 1: The primary components of our VR system Figure 2: The view through Oculus Rift (left) and lab setup (right) Figure 3: System architecture Figure 4: Pan-tilt fan system. (a) The dimension of the pan-tilt fan unit; (b) activated and resting fan unit; (c) Time measure for wind generation process Figure 5: Top-down view of the fan-unit layout. The white triangles are at lower level and the grey triangles are at higher level, and hang upside down Figure 6: The map of main hardware connections. (1. USB wires; 2. Signal wires; 3. Power wires) Figure 7: Wind module software architecture Figure 8: Wind module visualization Figure 9: Movement wind calculation Figure 10: Floor vibration module actuator layout Figure 11: Connection map of the floor vibration module. All the cables shown are audio signal cables Figure 12: Floor Vibration Module Software Architecture Figure 13: Vibration Visualizer Figure 14: View of the rings from the start location. The dotted lines and numbers are added here for clarity, and were not shown during the experiment Figure 15: Triangle Path Layouts Figure 16: Visualization of performance measures for the Triangle-completion Task Figure 17: Path Visualizations of Individual Trials. They visualized relatively good (left) and bad (right) task performance Figure 18: Path visualizations of trials grouped by conditions and layouts. The left grouped path visualization is with condition FV+FS, and the right grouped path visualization is with condition MW vi
7 Figure 19: Main effect of Footstep Vibration (FV) on Absolute Distance Error ( DE ) and Absolute Relative Distance Error ( RDE ) Figure 20: Subjective ratings for each of the eight questions in the main experiment Figure 21: Subjective Measure Mean Value X Condition (Analysis I). Q8 Dizziness was removed since the value was reversed and there was no significant difference noticed Figure 22: Interactions of MW FS and FV FS in Q3 Realism (Analysis II) Figure 23: Interaction of FV FS in Q2 Walking (Analysis II) Figure 24: Triangle Path Layouts Figure 25: Homogeneous means of conditions on Q7 Helpfulness Figure 26: Interactions of DW MW in Q4 Presence and Q7 Helpfulness vii
8 List of Tables Table 1: Design space of sensory cues. Cells contain examples for the given category. The cues used in our work are in BOLD CAPITALS. (AC: Airconditioner) Table 2: The cues studied in the related works in the design space Table 3: There were a total of eight experimental conditions, shown within the gray region Table 4: We asked participants to rate each of the conditions based on the following eight questions Table 5: Mean (M) and Standard Deviation (SD) values for all eight conditions on objective measures Table 6: The results of Analysis II on the subjective measures (Experiment 1).. 33 Table 7: Experimental Conditions Table 8: The results of Analysis II on the subjective measures (Experiment 2).. 38 viii
9 1 Introduction Human beings experience the world through different sensory channels, i.e., we see, hear, touch, smell, and taste, etc. It stands to reason that we should experience virtual worlds in the same manner, where we are convinced to be occupying another space with the help of various sensory cues. Multi-sensory feedback has been proven to increase immersion in Virtual Environments (VEs), and it has great potential to be effective in many other aspects [28]. However, it is complicated to study the effect of multi-sensory feedback as a single factor, as the effects are mixed, depending on various cue types and tasks. A design space is thus needed to categorize the sensory cues in a more generalized way, and into an appropriate granularity. 1.1 Design Space of Multi-Sensory Cues Multi-sensory feedback can first be grouped according to the five human senses, i.e., visual, auditory, haptic, etc., a common approach in virtual reality (VR) research [23]. Each group may or may not be further subdivided due to the nature of the sensory channel. For instance, the haptic group can be subdivided into kinaesthetic and tactile cues [3]. The former can be perceived from sensors in muscles, joints, and tendons, while the latter can be perceived cutaneously. As shown in Table 1, we can group the multi-sensory cue types not only based on sensory channels (the left two columns), but also based on their use (remaining columns), i.e., ambient, object, movement, and informational cues. Ambient Cues: Ambient cues provide a natural atmosphere surrounding the user, and they can be hard to identify. Ambient light and city-street noise are two examples in the visual and auditory domains, respectively. Object Cues: Object cues come from specific objects placed in the scene. For example, when an air-conditioner is placed on the ground in a VE, the user can see it, hear the hum sounds, feel the airflow coming from its 1
10 source, and feel the floor vibration within a certain distance from it. These are considered object cues in the visual, auditory, and haptic channels. Movement Cues: Movement cues are provided based on the user s motion. For example, when we walk, we can feel and hear the air moving past our ears. Informational Cues: Informational cues provide indications of additional information to the user. For example, when the user is approaching the boundary of the VE, floor vibration could serve as an alert for proximity. Table 1: Design space of sensory cues. Cells contain examples for the given category. The cues used in our work are in BOLD CAPITALS. (AC: Air-conditioner). Senses Cues Ambient Object Movement Informational Visual General Ambient Light Auditory Haptic Olfactory General Wind Floor Vibration Other General City-street Noise Atmospheric Wind Factory-floor Vibration Atmospheric Heating Smell of the Sea Visual Landmarks AC Hum AC Airflow Floor-type AC Vibration Object Collision Vibration Fruit Smell Gustatory General N/A Visual Flow FOOTSTEP SOUNDS MOVEMENT WIND FOOTSTEP VIBRATION Vehicle Seat Vibration N/A Information Panel Audio Instructions DIRECTIONAL WIND Proximity Alert Directional Vibration Indication Rosemary Indicating CO To better illustrate these, we provide examples for both the visual and haptic senses in a given situation. Imagine a user in a virtual city, surrounded by environmental light and wind, which are ambient cues. As she moves, she sees visual flow and feels air moving past her body, which are movement cues. When she arrives at a factory, the buildings and vibrating machinery provide object cues. If she wants to find her way through the space, a virtual compass on the screen or a directional vibration belt she may wear could be used to provide informational cues that can indicate directions. Some of the examples shown in Table 1 can be 2
11 found in [8] and [35]. From the generalized design space, we selected certain cues for a focused study, as an exploration. 1.2 Our Work Travel is a fundamental task in VEs [3], and walking is one of the most commonly used types of travel (see, for example, first-person games). While physical walking is intuitive and can make people remain oriented with little cognitive effort [29], using it in VEs incurs technical and perceptual challenges [13]. Furthermore, it induces fatigue. An alternative method is to move in the VE using walking simulation, or non-fatiguing walking, that requires little accumulated physical exertion. The cost includes the loss of spatial orientation, self-motion perception, and overall presence, compared to physical walking. The main key factors that can help maintain the above, on a perceptual level, include field of view (FoV), motion cues (e.g., peripheral vision and vestibular cues), and multi-sensory cues (e.g., auditory and tactile cues). While the first two have been fairly thoroughly studied, the use of multi-sensory cues still remains open [3, 31]. In our study, we chose certain types of tactile cues from the design space, and investigated their effects in our VR setup, a non-fatiguing walking system, with a wide FoV, and vestibular, visual, and auditory cues enabled. We wanted to see whether a user s navigational performance and experience could be further enhanced when multi-sensory cues are introduced, or whether there would be negative effects due to multi-sensory interactions [3]. Based on the potential to aid spatial orientation, self-motion perception, and overall presence during nonfatiguing walking, we originally chose two tactile cues to study, movement wind (MW) and footstep vibration (FV). Since these movement cues are akin to our real world experience, we wanted to see how effective they are in the virtual world through simulation. We also chose one auditory cue, footstep sounds (FS), to study the multi-sensory interaction. Due to participant feedback in the first experiment, we conducted a follow-up experiment studying the effect of an informational tactile cue, directional wind (DW). 3
12 We had the following hypotheses about the effect of tactile cues selected in our study. H1.1 and H1.2 were on MW and FV, based on which we designed Experiment 1. Due to the participants requests for DW in Experiment 1, we designed a follow-up experiment that examined H2.1 and H2.2. H1.1: Adding tactile cues (MW and FV) will enhance spatial orientation task performance. H1.2: Adding tactile cues (MW and FV) will improve user experience during non-fatiguing walking. H2.1: DW will improve task performance over conditions where it is not present. H2.2: DW will improve user experience over conditions where it is not present. 1.3 Contributions First, we created a design space to categorize multi-sensory cues for exploration. Second, we developed and described a full-stack immersive multi-sensory VR system which will be helpful for future researchers to replicate. Third, through rigorous user studies, we showed that tactile cues significantly improved user experience in VEs, and that footstep vibration in particular can also help maintain spatial orientation. We believe these insights will help future researchers and developers to choose multi-sensory cues more appropriately for their walking simulations. The rest of the thesis is organized as follows. We present a detailed account of relevant earlier work in Section 2. Section 3 presents the development of our VR system, which was our experimental platform. Section 4 presents the empirical method, including two user studies and their analyses. In Section 5, we conclude by pointing towards future research directions. 4
13 2 Related Work In this section, we establish related work by listing and discussing the studies on the secondary cues that we selected, i.e., wind and vibrotactile-enhanced footstep simulation, and the studies on path integration (PI), i.e., a measure for spatial orientation in VR. 2.1 Selected Secondary Cues in VR The related works studying wind and footstep vibration are listed, followed by a discussion of the types of sensory cues selected, the effects studied, and the issues found about implementation. In particular, the sensory cues studied were fit into our design space (Table 1 and Table 2). Table 2: The cues studied in the related works in the design space. Cues Ambient Movement Object Informational Wind Sensorama [12] WindCube [24] VR Scooter [10] Wind&Warmth [14] Virtual Sailing [39] Wind&Warmth [14] WindWalker [9] Footstep Vibration KKE [36] Plantar [37] Other Vibration Sensorama [12] VR Scooter [10] Wind in VR Various displays have been developed and studied for generating wind cues for different uses. In the 1960s, the first wind display providing movement wind cues for VR was integrated in Sensorama [12], a motorcycle simulator. More systems and studies about wind in VR have been created more recently. The WindCube [24] used 20 fixed fans positioned around and close to the user to provide ambient wind cues. The study indicated enhanced presence by adding wind to a visualonly pre-computed snowstorm scene. The Head-mounted Wind system [6], using a group of fans mounted on a wearable framework, explored the portability of fan units and examined direction estimation error. The VR Scooter [10] was a virtual 5
14 locomotion device equipped with movement wind cues produced by a fan. The authors found that wind feedback indicating user movement, together with vibration feedback indicating collisions, improved user performance by providing more accurate sensations during motion. In other work, a wearable device [16] was developed by using an audio speaker and tube air delivery, and a two-point threshold experiment was conducted to find out the wind-sensitive parts of the head. WindWalker [9], providing informational wind cues for guidance, was head mounted, and was used as an orientation tool to indicate free paths when users were traversing a virtual maze blindfolded. Other work [17] created an atmospheric display with a wind tunnel to approximate natural airflow. The sense of presence of Virtual Sailing [39] was also enhanced by movement wind cues based on sailing speed and direction. A system simulating experiences such as a volcano scene [14] provided both ambient and object wind cues with a group of fixed fans. Some trends were found on the effect of wind and warmth on presence enhancement. In the cited works that included empirical studies, various cue types were generated for different study purposes. Movement wind was mostly studied [10, 39], followed by ambient [14, 24], object [14] and informational wind [9]. The study purposes included examining the effects on perception enhancement, user experience, and performance. The existing studies on user-experience enhancement were limited to vehicle scenarios [10, 39], while our current work is interested in walking situations. There are existing studies about navigation performance [9, 10], but none of the studies was on spatial orientation, which we focus on here. There are various ways of implementing wind displays. Fan sets are most commonly used [6, 10, 14, 24, 39]. Other implementations include using an air compressor [32], a controllable vent [17], and an audio speaker [16]. Due to the noise produced, the bulkiness of the air compressor and vent, and the limited wind coverage generated by the audio speaker approach, we chose fan sets in our study. However, one of the main drawbacks of existing fan systems is latency [14], 6
15 meaning the delay from the moment the wind is triggered in the VR software component until the user feels the wind. This is mainly caused by the time it takes the fan motor to spin up to speed. More immediate wind feedback onset based on user movement using fans is thus hard to implement and study. Similar problems exist in terms of removing the wind sensation, as fans take time to slow down. In our study, this on/off latency issue was solved by making the fan spin all the time on a pan-tilt platform, which we can quickly point towards and away from the user Vibrotactile-enhanced Footstep Simulations in VR Another potential aid to user experience and performance during non-fatiguing walking in VR is the simulation of footsteps. Cues for this are a combination of movement cues across multiple sensory channels, i.e., visual (head bob), auditory, and vibrotactile during virtual movement, while the user is not physically walking. Early studies have shown that camera motion can improve presence in walking simulations [19] and synthetic footstep sounds enhance the sensation of walking [25]. Recent studies have shown the great potential of vibrotactile cues to further enhance user experience [25, 38]. In the study of King Kong Effects [36], vibrotactile tiles were put under the user s feet, and a clear preference for the combination of visual and vibrotactile cues was suggested in terms of walking sensation. Another study using plantar vibrotactile cues in a non-immersive environment [37] found that walking realism was further improved when the auditory cues were combined with vibrotactile cues, regardless of whether or not there were visual cues. While these studies on user-experience enhancement were based on desktop systems [36, 37], we were curious about the effects in immersive VEs. Similar to wind studies on performance, to the best of our knowledge, there are no existing studies about the effects of footstep simulation on spatial orientation in VR. 7
16 2.2 Path Integration in VR One of the commonly used tasks to measure spatial orientation in real environments is path integration (PI), which is a standard, well-defined navigational test in the real world, and has been extended to VR [21]. The user first travels along a path consisting of multiple segments, then is asked to return to the origin without seeing the travelled path or starting point. Vestibular and proprioceptive cues were shown to have positive effects [7, 15]. Other studies were focused on the effect of visual cues and the results were mixed. Visual display size was proven to affect performance, i.e., physically large displays led to better performance in PI [34]. People performed better in 2D environments than in 3D. People being shown a map prior to the task performed worse than those who were not shown the map, which was counterintuitive [2]. Geometrical field of view did not affect performance [27]. Visual and audio immersion had no significant effect either [30]. On the other hand, path properties in PI, such as the number of segments, path layout, and homing distance [40], were shown to affect performance significantly. In our study, we examined whether certain secondary cues would allow the user to perform better at PI, i.e., to better maintain spatial orientation, in HMD-based VEs, and during non-fatiguing travel, where vestibular and proprioceptive cues are only partially present. 8
17 3 System Implementation To study the effects of selected tactile cues on both user experience and spatial orientation during non-fatiguing walking in VEs, we developed a multi-sensory immersive VR system with tactile feedback including wind and floor vibration, using a modified version of the ChairIO travel technique [1]. The system was designed based on two themes in our study. First, we devised a low-latency solution to control the wind speed and direction based on changes in user motion, and floor vibrations for simulating user footsteps in VR [11]. The system is thus able to deliver tactile cues in the experiments. Second, instead of holding devices, standing, pointing, or physically walking around, the modified ChairIO technique enables the user to sit on a chair, swivel to rotate, and travel by leaning the upper body. With such a design, we preserved key factors already known that can contribute to non-fatiguing walking experience and performance in our experiments, including wide FoV, and vestibular, visual, and auditory cues. 3.1 Physical Layout Figure 1 and Figure 2 show a schematic layout of the physical space and the components of our system. We created a cage-like setup for the hardware components, and the user was positioned at the center of the cage. In the cage, the user was asked to sit on a Swopper Chair [33], transformed into a motion-control input device using a B-Pack Compact Wireless Accelerometer (Model WAA-001). The user wore an Oculus Rift DK2 head-mounted visual display, which included a head-orientation tracker (without positional tracking). This setup enabled the user to walk around in the virtual scene by leaning to control the pitch and roll of the chair using her body, and to look/hear around by swiveling her chair and head. A noise-cancelling headset (Bose QuietComfort 15) was used for audio rendering. The user was surrounded by eight pan-tilt fan units mounted on the 2.5m diameter octagonal frame of the cage for wind cues, and four low-frequency vibration actuators mounted under a raised floor for vibration cues. 9
 Figure 3 shows the system architecture.")


18 Figure 1: The primary components of our VR system Figure 2: The view through Oculus Rift (left) and lab setup (right) Figure 3 shows the system architecture. The simulation (Sim), with a virtual scene in it, based on Unity3D, is the core of system input and output control. The user input is received from the accelerometer on the chair and the orientation sensor from the DK2. The visual and auditory outputs are sent from the Sim to the DK2 display and the audio headset. The Sim also produces the necessary commands that are sent to the wind and floor vibration subsystems, which convert the commands into control of the physical feedback devices. 10

 has a 120mm DC fan (Delta AFB1212SHE-4F1C) mounted on a pan-tilt platform controlled by two servomotors.")
19 Figure 3: System architecture 3.2 Wind Module The wind module is a group of pan-tilt fan units controlled by two Arduinos connected to the Wind Server through USB. The software running on the server receives commands from Sim, and manipulates the firmware and hardware to provide wind feedback to the user Hardware and Firmware Pan-tilt Fan Unit Eight pan-tilt fan units are installed in the cage. Each fan unit (Figure 4a) has a 120mm DC fan (Delta AFB1212SHE-4F1C) mounted on a pan-tilt platform controlled by two servomotors. Wind speed of each fan is controlled over a range from 0 (off) to 255 (MAX, or 4 m/s measured at a distance of 50 cm). By using the pan-tilt fan unit instead of a fixed fan, we were able to reduce the latency of wind feedback, mainly caused by fan motor speed changes, reported with previous wind systems [14]. To address the significant lag, the fans on our pan-tilt platforms always spin at a minimum level of 100, but are turned away from the user when the wind should be still, and can quickly be turned 11

")


20 towards the user and spun up when needed. We did a frame analysis using 30 fps video capture, to measure both the fixed and pan-tilt fan systems. We simulated the fixed-fan system by fixing the fan toward the user. As shown in Figure 4c, in our system, the end-to-end dataflow of wind delivery is from the user trigger (leftmost) to user perception (rightmost), where the Sim and Wind Server were running on the same PC. It took an average of 0.37s from software trigger to the fans. However, it took the fixed fan 3.53s to start generating wind from zero, but only took 0.33s for the pan-tilt fan unit, which was already spinning at a lower level, to turn to the user. With such a design, near-instant movement wind feedback can be applied or removed (Figure 4b). (a) (b) (c) Figure 4: Pan-tilt fan system. (a) The dimension of the pan-tilt fan unit; (b) activated and resting fan unit; (c) Time measure for wind generation process. 12
 while the others are mounted upside down at a higher level (1.9m). Figure 5: Top-down view of the fan-unit layout.")
21 Fan Layout A top-down view of the fan-unit layout is shown in Figure 5. The eight units are divided into two groups, four are installed at a lower level (0.85m above the ground) while the others are mounted upside down at a higher level (1.9m). Figure 5: Top-down view of the fan-unit layout. The white triangles are at lower level and the grey triangles are at higher level, and hang upside down Connection Map Each fan unit also belongs to one of two Wind Sets, each of which consists of hardware and firmware, and controls up to five fan units. The figure below shows the connection map, including a detailed structure of one Wind Set. 13
.")
 Wind Calculator: Parses the received commands and calculates appropriate hardware-control level commands.")
22 Figure 6: The map of main hardware connections. (1. USB wires; 2. Signal wires; 3. Power wires) Software The wind module software is a control program installed on the wind server (Figure 7). It has four main parts: Socket Connection: Receives commands sent from VR Sim through User Datagram Protocol (UDP). The commands carry information including real-time user position and rotation in the VE, as well as in the physical space if supported by the tracking system. (See Appendix A for the communication protocol) Wind Calculator: Parses the received commands and calculates appropriate hardware-control level commands. Wind Manager: Takes the calculated commands from the Wind Calculator and sends them to the Arduino board, so as to control the corresponding fan units. Logically, it manipulates each fan unit directly according to a hardware mapping configuration file. With such a design, the hardware can be connected with flexibility. 14

23 Wind Visualizer: Visualizes the physical space and the wind generated from each fan unit. Figure 7: Wind module software architecture Wind Visualizer The Wind Visualizer displays the real-time state of the physical space, including the user, fan units, and the wind generated. As shown in Figure 8, a green wireframe box represents the cage, in which there is a cyan wireframe box representing the user in the visualization window. From each pan-tilt fan unit mounted in the cage, a cyan line indicating the wind generated with corresponding speed (mapped to the length of the line) and direction is drawn. 15
, movement wind, object wind, and directional wind. Movement wind is calculated based on the user s motion direction and speed (Figure 9).")
24 Figure 8: Wind module visualization Wind Calculator The Wind Calculator can calculate three types of wind cues in the design space (See Section 1.1), movement wind, object wind, and directional wind. Movement wind is calculated based on the user s motion direction and speed (Figure 9). Certain fan units within range turns toward the user, blowing with a weighted wind speed. Directional wind is generated in a simpler way. Three adjacent fans are selected and pointed at the user, blowing with smoothly varying speed within the range [100, 255]. Object wind generates wind within a specified range, in the shape of a cone, though we did not use it in the current studies. 16

25 Figure 9: Movement wind calculation 3.3 Floor Vibration Module Similar to the Wind Module, the Floor Vibration Module receives commands from the VR simulation and sends the calculated audio signals to a group of lowfrequency audio actuators to generate floor vibration Hardware The hardware control of the floor vibration module is implemented by sending calculated audio values (frequency and amplitude) by control software, then through an amplifier to a group of low-frequency audio actuators (Buttkicker LFE units [4]) installed under a raised floor to generate floor vibration. Alternatively, a mono audio signal can be sent directly to the amplifier from the VR simulation, bypassing the Vibration Server. This latter approach was used in our experiments, using the subwoofer channel of our 5.1 audio system Actuator Layout A group of four actuators is installed under the raised floor, as shown in Figure
.")
 Vibration Calculator: Parses the received commands and calculates appropriate hardware-control level commands.")
26 Connection Map Figure 10: Floor vibration module actuator layout Figure 11 shows the connection map of vibration hardware. Figure 11: Connection map of the floor vibration module. All the cables shown are audio signal cables Software The floor vibration module software is a control program installed on the floor vibration server (Figure 12). Similar to the wind module, it has four main parts: Socket Connection: Receives commands sent from VR Sim through UDP. (See Appendix A on the communication protocol) Vibration Calculator: Parses the received commands and calculates appropriate hardware-control level commands. Vibration Manager: Takes the calculated audio frequency and amplitude from Vibration Calculator and sends them to the amplifier. 18

 Figure 12: Floor Vibration Module")
27 Vibration Visualizer: Visualizes the audio amplitude and frequency of current state through an oscillograph. (Figure 13) Figure 12: Floor Vibration Module Software Architecture Figure 13: Vibration Visualizer 19

28 4 Empirical Study We ran two user studies using our VR system, one main experiment and one follow-up experiment, to evaluate the effectiveness of the selected tactile cues in isolation and combination, on user performance and experience during walking. We studied three tactile cues, movement wind, footstep vibration, and directional wind, as well as another cue, footstep sounds, for the study of interaction. 4.1 Experimental Task The task used in both experiments was a triangle-completion task, which is one form of a path integration task to measure the user s spatial orientation in VR [21] (Figure 14). In the task, there were three rings (radius = 4m) in the scene, and the participant was first positioned at the center of the first ring, with the second and third rings in sight. The participant was asked to move to the second ring, then to the third ring. Each successive target ring was highlighted. As soon as the participant reached the third ring, all of the rings disappeared and she was asked to return to her initial position in the first ring. Figure 14: View of the rings from the start location. The dotted lines and numbers are added here for clarity, and were not shown during the experiment. 20
29 4.2 Experiment 1: Movement Wind, Floor Vibration and Sound The focus of this experiment was to evaluate the effects of movement wind, footstep vibration, and footstep sound on performance of the triangle-completion task, as well as the overall user experience Experimental Design We designed a within-subjects experiment, which enabled us to reduce error variance associated with individual differences. All trials included visual and ambient audio feedback. There were eight combinations of the three independent variables, with/without Movement Wind (MW), with/without Footstep Vibration (FV), and with/without Footstep Sounds (FS), and each participant was exposed to all eight conditions (Table 3). Overall, there were five independent variables in this study. Movement Wind Cue {On, Off} A velocity-proportional wind was either blown or not towards the participant based on her movement in the VE. Footstep Vibration Cue {On, Off} The floor of the system on which the participant placed her feet was either vibrated or not based on her footsteps. We provided a pair of sandals with thin soles and asked participants to wear those during the experimental sessions. This helped eliminate any error due to the differences in sole thickness of various shoes, which may have affected the perception of floor vibration. Footstep Sound Cue {On, Off} The sound of footsteps was either rendered or not based on the participant s footsteps during movement in the VE. Triangle Path Layout {Path 1, Path 2, Path 3, Path 4} We used four different paths in this study. Each of these paths was used in every condition for all participants. The paths were carefully designed to reduce repetition and learning effects. The length of the first side, of the second side, and the angle between the first and second sides for each of 21
30 the paths were as follows: Path 1 (90m, 51.96m, 90 ), Path 2 (103.92m, 60m, 90 ), Path 3 (103.92m, m, 60 ), Path 4 (60m, 60m, 120 ) Triangle Direction {Clockwise, Counterclockwise} To further reduce learning effects and to create variety in the travel task, we introduced the target rings in the VE in either a clockwise or counterclockwise layout. The first three independent variables were the focus of this experiment, while the last two were designed with the purpose of variation and counterbalancing. Eight triangle path layouts, based on the last two variables, were used in the experiment (Figure 15). With each of the eight conditions, the participant went through four triangle path layouts, either group (a) or group (b). Thus, every participant experienced 8x4 triangle-completion trials. We counterbalanced the conditions using an 8x8 Latin-square. We further counterbalanced the paths using a 4x4 Latin-square and alternated between clockwise and counterclockwise in each successive trial. Overall, we collected 8x4x24 = 768 data points in the whole experiment. Table 3: There were a total of eight experimental conditions, shown within the gray region. MW FS Yes No FV FV Yes No Yes No Yes ALL MW+FS MW+FV MW No FS+FV FS FV NONE 22
31 Figure 15: Triangle Path Layouts Procedure Before the experimental task, each participant signed an IRB-approved consent form, and filled out a demographic form indicating age, gender, handedness, and experiences related to video games and VR. We used the Gilford Zimmerman orientation survey (GZ test) [18] as a pre-test to measure spatial orientation ability in VR. During the experimental task, participants could look and move around within a flat-ground forest, where the trees were randomly planted. The VE was designed to make sure that the visual cues were randomly spread. All trees looked the same and we made sure that they were placed randomly in a way that participants could not use density or patterns of trees as cues for orientation. Each participant first went through a training session, where she travelled freely in the environment and then completed equilateral triangles (side=50m), with all three rings shown, with and without the existence of all the independent variables. The participant was told to remember the perception of travelling through each 50m side as a base for distance estimation later in the actual experiment. Then participants completed every trial under all of the conditions. At the end of each trial, we asked participants the length of distance units she travelled. After each condition section, she filled out a subjective questionnaire (Table 4), 23
32 followed by a two-minute mandatory rest period. After the experimental task, we asked each participant to rank the different conditions, and tell us the strategies she applied Measures Our measures included both objective and subjective ones Objective Measures In order to measure spatial-orientation performance, the following dependent variables were defined (refer to Figure 16). Signed Distance Error (DE): The difference in length between Edge 4 and Edge 3. A positive value means that the distance between the participant s Final Stop and Vertex 3 is longer than Edge 3. Absolute Distance Error DE : The absolute value of (DE). Signed Relative Distance Error (RDE): The ratio of (DE) to Edge 3. Absolute Relative Distance Error RDE : The absolute value of (RDE). Signed Angle Error (AE): The counterclockwise angle from Edge 3 to Edge 4. Absolute Angle Error AE : The absolute value of (AE). Signed Distance Estimation Error (DEE): The difference between the participant s estimated distance travelled and the real distance travelled. A positive value means that the distance was overestimated. Absolute Distance Estimation Error DEE : The absolute value of (DEE). Closeness: The distance between Vertex 1 and Final Stop. 24
33 Figure 16: Visualization of performance measures for the Triangle-completion Task Subjective Measures Subjective data were also collected to measure user experience. There was one questionnaire rating for each condition, which asked about the sense of presence and movement, etc. Table 4: We asked participants to rate each of the conditions based on the following eight questions. Question Number Subjective Measure 1 Movement Sensation 2 Walking Sensation Question (range: 1-6) To what extent did you experience the sensation of movement? To what extent did you experience the sensation of walking? 3 Realism How close did the computer-generated world get to becoming like the real world? 4 Presence To what extent were there times during the experience when the computer-generated world became the "reality" for you, and you almost forgot about the "real world" outside? 5 Presence To what extent did you experience the sense of "being there" while you were travelling in the VE, as opposed to being a spectator? 6 Helpfulness Please rate your sense of direction while you were travelling in the VE. 7 Helpfulness Please rate the extent to which you think the feedback in this condition helped your performance of the task? 8 Dizziness How much dizziness did you experience while performing the task in this condition? 25
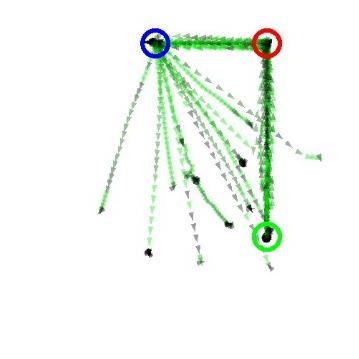
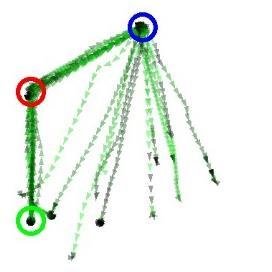
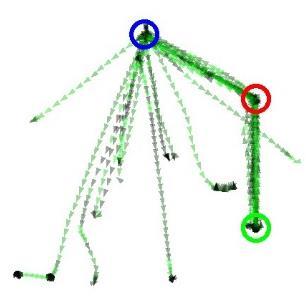
34 As shown in Table 4, Q1-2 measured motion perception, Q3-5 measured the sense of realism and presence, Q6-7 measured cue helpfulness, and Q8 measured dizziness. Comments and a top-three ranking of the conditions were also collected at the end of the experiment Participants Twenty-four participants (21 male) took part in the experiment. Their ages ranged from 18 to 31 (M=21, SD=3.58). In their background reports, half of them played video games frequently, while five of them had immersive virtual reality experience. The score of the pre-test (GZ test) [18] was within the range from -9 to 47 (M = 16.47, SD=14.9) Path Visualization We collected data on the participant s travel path for each trial, including her position and orientation in VE for every 0.4 seconds. As shown in Figure 17, each visualization represents a top-down view of an individual task trial, and the first, second, and third rings are marked as green, red, and blue. The participant s path is visualized as a sequence of small triangles, the position and orientation of which corresponds to the position and orientation of the user at that particular moment. The color of the triangle ranges from black to green, which is mapped to the travel speed. The transparency of the small triangle is set to 0.5, so that multiple paths can be overlapped to examine the overall effect. In Figure 17, the left represents better performance than the right, where the participant hesitated in judging the correct location. In Figure 18, the paths of all the trials with the same triangle layout and experimental condition are overlapped so that the overviews of various conditions can be formed and observed (see Appendix B for all path visualizations grouped by triangle paths and conditions in the two experiments). 26

35 Figure 17: Path Visualizations of Individual Trials. They visualized relatively good (left) and bad (right) task performance. Figure 18: Path visualizations of trials grouped by conditions and layouts. The left grouped path visualization is with condition FV+FS, and the right grouped path visualization is with condition MW Results In this section we present our results for the objective and subjective data. The data collected in the experiment were analyzed in SSPS v.21. Initially, we compared homogeneous means of the eight conditions by running one-way repeated measures ANOVA and Tukey s HSD post-hoc (Analysis I). Then, we examined the main effects and interactions of the three independent variables (MW, FV, and FS) by running 2x2x2 factorial repeated measures ANOVA (Analysis II). Other effects, such as the correlation between participants GZ-test score and their real performance, were also analyzed. 27
36 Objective Data From the results of Analysis I, when comparing homogeneous means of the eight conditions, we did not notice a significant effect on any of the objective dependent variables (Table 5). Table 5: Mean (M) and Standard Deviation (SD) values for all eight conditions on objective measures Objective Measures DE (m) DE (m) RDE Conditions ALL NONE FS FS+FV FV MW MW+FS MW+FV 14.5 (21.24) 21.3 (14.26) -0.1 (0.20) 15.4 (27.44) 25.5 (18.28) -0.1 (0.26) 12.3 (23.37) 22.4 (13.89) -0.1 (0.22) 13.4 (22.16) 20.1(16.3 2) -0.1 (0.21) 13.0 (23.10) 21.0 (16.08) -0.1 (0.22) 10.1 (27.59) 24.7 (15.74) -0.1 (0.26) (22.94) 22.0 (15.21) -0.1 (0.21) RDE 0.2 (0.13) 0.2 (0.17) 0.2 (0.13) 0.2 (0.16) 0.2 (0.15) 0.2 (0.15) 0.2 (0.14) AE ( ) AE ( ) DEE (m) DEE (m) Closeness (m) 12.6 (32.92) 24.0 (25.72) 14.3 (188.97) 121.7(144.77) 47.1 (30.58) 14.8 (29.86) 23.7 (23.42) 17.4 (180.36) 116.6(138.22) 51.7 (30.27) 11.5 (31.75) 25.6 (21.89) 29.9 (151.75) 97.3 (119.85) 52.5 (30.03) 11.3 (31.10) 24.9 (21.65) 29.7 (145.17) (106.0) 48.3 (30.04) 12.8 (30.59) 25.1 (21.59) 10.9 (176.55) (137.82) 50.4 (30.39) 8.9 (29.29) 25.1 (17.38) 22.2 (177.04) (130.88) 53.1 (26.44) 13.0 (30.57) 25.7 (20.97) (120.73) 93.0 (80.96) 52.2 (34.5) (23.25) 22.4 (14.47) -0.1 (0.22) 0.2 (0.13) 14.5 (30.64) 27.2 (20.05) (158.45) (115.82) 53.2 (29.08) However, from the results of Analysis II, we noticed a significant main effect of Footstep Vibration (FV) on Absolute Distance Error ( DE ): F(1, 23) = 7.27, p = 0.013, ηp 2 = 0.24, and on Absolute Relative Distance Error ( RDE ): F(1, 23) = 7.3, p = 0.013, ηp 2 = 0.24 (Figure 19). DE, defined based on previous triangle completion studies [34], showed that the absolute distance error was 2.5 meters less in the trials with FV. RDE, which was the proportion of DE to the returning side of the triangle, revealed a normalized error, also showing that the error in the trials with FV was 2.3% lower. 28

 and GZ-test score were moderately positively correlated, r(24) = 0.428, p = 0.037.")
37 Figure 19: Main effect of Footstep Vibration (FV) on Absolute Distance Error ( DE ) and Absolute Relative Distance Error ( RDE ) Among the other effects we examined, we found that overall, participants tended to underestimate their travel distance in the VE, although there was no significant difference between conditions. This is consistent with numerous earlier studies that report distance underestimation in VEs. The correlation between performance and GZ-test score was analyzed. Among all the objective measures, we found that Absolute Distance Estimation Error ( DEE ) and GZ-test score were moderately positively correlated, r(24) = 0.428, p = No significant correlation was found between GZ-test score and other objective measures Subjective Data As shown in Table 4, we asked eight questions to participants after each of the conditions. From the results of Analysis I for each question, overall, we noticed a strong preference for the ALL condition and a strong disfavor for the NONE condition (see Figure 20). From a combined line chart view (Figure 21) of the subjective measures over the eight conditions, ordered to make the curves as smooth as possible, we notice a trend. The ratings increased with the number of cues involved. In addition, in conditions where FV was involved, the ratings tend to be higher, and have more impact. 29




38 Figure 20: Subjective ratings for each of the eight questions in the main experiment. 30
: We found that the data did not meet the assumption of sphericity (p = 0.002).")
39 Figure 21: Subjective Measure Mean Value X Condition (Analysis I). Q8 Dizziness was removed since the value was reversed and there was no significant difference noticed. The significant results of Analysis I are reported in detail as follows. Question 1 (Movement): We found that the data did not meet the assumption of sphericity (p = 0.002). There was a significant difference between conditions F(3.72, 85.63) = 2.57, p = 0.047, η p 2 = 0.1. Participants reported NONE to be the worst condition, which was significantly worse than MW (p = 0.03). Question 2 (Walking): ANOVA showed a significant difference between conditions F(7, 161) = 20.1, p < 0.001, η p 2 = Overwhelmingly, the NONE condition was rated significantly worse than all other conditions (p < 0.01) except for MW. Condition ALL was rated significantly better than MW and NONE at p < MW was significantly worse than ALL (p < 0.001), FS+FV (p = 0.001), FV (p = 0.002), and MW+FV (p = 0.001). 31
40 Question 3 (Realism): We noticed significant differences between 2 conditions F(7, 161) = 9.5, p < 0.001, η p = Condition NONE was significantly worse than all other conditions: ALL (p < 0.001), FS (p = 0.03), FS+FV (p < 0.001), FV (p < 0.01), MW (p = 0.01), MW+FS (p = 0.001), and MW+FS (p < 0.001). We did not find any other significant differences between other conditions. Question 4 (Presence): In this question, we found a significant difference 2 between conditions F(7, 161) = 6.3, p < 0.001, η p = Condition NONE was significantly worse than ALL (p = 0.02), FS+FV (p < 0.01), FV (p = 0.04), and MW+FV (p = 0.001). There was no other significant difference between other conditions. Question 5 (Presence): We noticed a significant difference between 2 conditions: F(7, 161) = 4.5, p < 0.001, η p = Condition NONE was significantly worse than ALL (p = 0.003) and MW+FV (p < 0.05). Question 6 (Helpfulness): Similar to Question 5, we found a significant 2 difference between conditions: F(7, 161) = 2.7, p = 0.01, η p = 0.11; and condition NONE was significantly worse than ALL (p = 0.02) and MW+FV (p = 0.04). Question 7 (Helpfulness): We noticed that the data did not meet the assumption of sphericity (p < 0.01). Accordingly, we applied Greenhouse-Geisser 2 adjustment: F(4.42, ) = 17.33, p < 0.001, η p = Condition NONE was rated significantly worse than all other conditions at p < values. Condition ALL was rated highest among all conditions and it was significantly better than NONE and MW (p = 0.008). Similar to ALL, FS+FV was significantly better than MW (p = 0.02) and NONE. Condition MW was significantly worse than ALL, FS+FV, MW+FS (p = 0.009), and MW+FV (p = 0.01). Question 8 (Dizziness): We did not find any significant differences between the conditions in terms of ratings. By applying Analysis II, we found both significant main effects of three independent variables, and significant interactions between them (Table 6). In 32
 Subjective Measures Q1 F = 10.0** Movement Yes > No Q2 F = 8.8** Walking Yes > No Q3 F = 11.6** Realism Yes > No Q4 F = 6.")

41 terms of the main effects, all of the three independent variables led to significant preference in ratings on most questions. We also found that FV had the most impact on the effect. Table 6: The results of Analysis II on the subjective measures (Experiment 1) Subjective Measures Q1 F = 10.0** Movement Yes > No Q2 F = 8.8** Walking Yes > No Q3 F = 11.6** Realism Yes > No Q4 F = 6.9* Presence1 Yes > No Q5 F = 13.9** Presence2 Yes > No Q6 Help Q7 F = 7.1* Help Yes > No Q8 Dizziness * P < 0.05 **P < 0.01 ***p < df = 1/23 Main Effects MW FV FS F = 54.7*** Yes > No F = 21.9*** Yes > No F = 45.8*** Yes > No F = 8.3** Yes > No F = 27.8*** Yes > No F = 4.6* Yes < No F = 22.6*** Yes > No F = 15.3** Yes > No F = 4.8* Yes > No F = 7.0* Yes > No F = 22.0*** Yes > No MW FV Interactions MW FS FV FS F = 13.8** F = 5.5* F = 5.2* MW FV FS Besides main effects, three significant interactions were noticed. Two of them are from Q2 Realism. They are MW FS and FV FS. All of the interactions showed that the effects of FV or MW became less noticeable in the presence of FS (Figure 22). Figure 22: Interactions of MW FS and FV FS in Q3 Realism (Analysis II) 33


42 Figure 23: Interaction of FV FS in Q2 Walking (Analysis II) Discussion In this section, we first discuss the effect of tactile cues individually, then discuss their effects and interactions in combination. Previous studies focused more on examining the subjective effect of movement wind in vehicle simulations [10, 39]. Our results showed that the effect can be further applied to walking simulations, where it not only enhances presence and movement sensation, but can also play a positive role in improving walking sensation. However, it did not show any noticeable aid to maintaining spatial orientation. From our study, the positive effects of footstep vibration on walking sensation were shown for immersive VEs. They were also strongly preferred in terms of overall presence. Furthermore, we found that people s spatial orientation can be better maintained with the support of footstep vibrations; they helped reduce the absolute distance error in the triangle completion task. There are two main reasons that may cause the effect. One is about the strategy that the participants may have applied in the task. Half of the 24 participants mentioned that they tried to count footsteps to measure how far they went when they experienced conditions with FV or FS, but FS did not show a significant main effect on performance. The other reason could be that FV contributed more to the 34
43 self-motion perception, which might help in maintaining spatial orientation during travel in VEs [31]. From the results on individual contributions of the tactile cues, our first hypothesis on task performance (H1.1) was partially supported, and our second hypothesis on user experience (H1.2) was fully supported. By observing the effects and interactions in combination, we showed strong support for the common intuition mentioned in previous work, that in multi-sensory systems, adding more cues tends to get more preference [3, 31]. This is based on the finding from Analysis I that participants did not like the NONE condition and overwhelmingly preferred the ALL condition, and the ratings generally increased with the number of cues. However, despite the more cues equals greater preference rule, we found interactions between multi-sensory cues. All three interactions found in Analysis II showed that the existence of one cue could make the effect of another cue unnoticeable. This kind of interaction was mostly found between FV and FS, but not between FV and MW. One possible and intuitive reason could be that the more closely the two cues are related or matched, the more likely they might mask each other. Another finding is that the two tactile cues had different levels of impact. We found that FV was stronger, both subjectively and objectively, while MW was a relatively weak cue for influencing positive performance or experience. This finding motivated us to further investigate wind feedback as an informational cue in a follow-up experiment. 4.3 Follow-up Experiment In Experiment 1, 10 of the 24 participants mentioned during the post-experiment feedback that they would have preferred to have directional wind (wind blowing from a fixed direction) in addition to movement wind. They predicted that directional wind would help them spatially orient themselves in the VE, like a visual landmark in the real world. Consequently, we conducted a follow-up 35
44 experiment to investigate whether or not adding directional wind would affect user performance and experience Experimental Design All trials in the experiment included visuals, ambient audio feedback, Footstep Vibration (FV), and Footstep Sound (FS). There were four combinations of the two independent variables, with/without Movement Wind (MW) and with/without Directional Wind (DW). Each participant was exposed to all four conditions (Table 7). Four triangle layouts were used, as shown in Figure 24. With each condition, the participant went through all the layouts. Thus, every participant experienced 4x4 = 16 triangle-completion trials. Overall, we collected 16x16 = 256 data points. Table 7: Experimental Conditions. MW DW Yes No Yes ALL MW No DW NONE Figure 24: Triangle Path Layouts Participants A total of 16 participants (9 male) took part in the experiment. Their ages ranged from 19 to 34 years (M = 25, SD = 4.25). The participants for Experiment 2 were all different from Experiment 1, but with similar demographics. The score of the pre-test was within the range from -1 to 48 (M = 18.5, SD = 12.64) Results Below we present the results of the second study. Similar to the first study, we used repeated measure ANOVAs with condition as an independent variable of 36
45 four levels (Analysis I) and 2x2 factorial repeated measures ANOVA with two independent variables DW and MW (Analysis II) to analyze the data Objective Data In Analysis I, we did not find any significant differences between conditions on any of the objective dependent variables. Similarly for Analysis II, we did not find significant main effects or interactions. Contrary to our expectations based on participant feedback in the main experiment, Directional Wind (DW) did not further improve performance based on FV and FS. The correlation between performance and GZ-test score was analyzed. Among all the objective measures, we found that the total time taken for the trials and GZ-test score were strongly positively correlated, r(16) = 0.525, p = Specially, we found that the time taken for the third (returning) side of the triangle (Side 3) and GZ-test score were strongly positively correlated, r(16) = 0.629, p = We also found that the Estimated Distance and GZ-test score were moderately positively correlated, r(16) = 0.54, p = No significant correlation was found between GZ-test score and other objective measures Subjective Data In Analysis I, we found significant difference in Q7 Helpfulness, F(3, 45) = 12.1, 2 p < 0.001, η p = 0.45 (Figure 25). In the Tukey s HSD post-hoc test, we found NONE was significantly worse than all the other conditions, p < We also found DW was significantly better than MW, p <
, we found significant main effect of DW on Q7. Surprisingly, we noticed a significant negative main effect of MW on Q6.")
46 Figure 25: Homogeneous means of conditions on Q7 Helpfulness In the results of Analysis II (Table 8), we found there was no main effect on Movement, Realism and Presence. In the questions of Helpfulness (Q6 and Q7), we found significant main effect of DW on Q7. Surprisingly, we noticed a significant negative main effect of MW on Q6. Two significant cross-over interactions were found in Q4 Presence and Q7 Helpfulness (Figure 26). Table 8: The results of Analysis II on the subjective measures (Experiment 2) Subjective Main Effects Interaction Measures DW MW DW MW Q1 Movement Q3 Realism Q4 Presence1 F = 5.3* Q5 Presence2 Q6 Help F = 8.0*, Yes < No Q7 Help F = 23.8***, Yes > No F = 11.7** Q8 Dizziness * P < 0.05 **P < 0.01 ***p < df = 1/23 38

47 Figure 26: Interactions of DW MW in Q4 Presence and Q7 Helpfulness Discussion We had expected that people would use DW as a virtual compass to help performance, so that the absolute angular error could be reduced, while from the results of the objective measures we found that the addition of DW did not further improve user performance in the existence of FV and FS. Hence, our first hypothesis (H2.1) was not supported. The objective results were contrary to the participants strong expectation on the helpfulness, which was shown in Q7. Our second hypothesis (H2.2) was partially supported. In addition, seven out of 16 participants mentioned that they used DW as a compass to help recognize orientation. One explanation for the contradiction between people s expectations and real performance could be that people overestimated their skills at making use of wind direction. Another possible reason could be a system limitation, i.e., the orientations of head tracker and the chair were not separated, which might prohibit people from looking around while moving in a certain direction. This might have influenced their natural behavior while performing the task. A third possible explanation is sensory overload. In this experiment, all conditions had FV and FS, and DW barely showed positive influence on either performance or experience. It could be that other visual, audio, and/or floor vibration cues were stronger than the sensation of wind. Having multiple cues at the same time might have also caused a sensory overload, which means more sensory input was provided to the participant at a given time than they could process [20]. A sensory 39
48 overload can result in confusion and cognitive strain. While there are individual differences in how people overcome sensory overload, generally, the human brain is trained to ignore certain sensory inputs based on the given situation [22]. Another support for the explanation of sensory overload from our experiment was that, we found a negative impact of MW on user experience, based on one main effect (Q6) and two crossover interactions. This was not found in Experiment 1, where all the significant effects were positive. It indicates that the addition of another cue (DW in our case) could even reduce the preference of an existing cue from the same sensory channel. 40
49 5 Conclusion In this thesis, a framework is presented for defining how multi-sensory cues can be systematically discussed, combined, and evaluated in the context of immersive VR. After identifying a region of this space to explore, we then set about creating a method for effectively controlling the delivery of wind to an immersed user, focusing on reducing the latency inherent in such systems. In addition, we created a raised floor with vibration feedback to simulate footstep vibrations for nonwalking locomotion. Finally, we recreated a ChairIO [1] approach to nonfatiguing locomotion. This allowed us to combine off-the-shelf visual and audio support with our experimental systems for secondary cue delivery and locomotion. We then used this system to run two user studies to investigate the effect of tactile cues (FS, FV, MW, and DW) on spatial orientation performance and user experience, in order to measure the contribution of tactile cues (FV, MW and DW) individually and in combination. Combining the results from both experiments, we found that, the simulated tactile cues based on real world situations have positive effects during non-fatiguing walking in VEs, even in the presence of known support like wide FoV, and vestibular, visual, and auditory cues. Generally, adding more cues leads to stronger preference. However, this is not always true. First, we saw a stronger effect of floor vibration on both performance and experience than of wind, and thus one might mask another. Second, closely related cues (FV and FS, MW, and DW) tend to interact with each other. Future researchers and developers should consider introducing these cues into their systems. We particularly suggest including footstep vibration into the non-fatiguing walking experience, and adding more cues based on the goals of the system, taking possible interactions into account. Although wind feedback was not found to be very helpful in our experiments, we intend to investigate more about this cue in other task scenarios, and to increase the intensity of the wind 41
50 feedback. We believe our results will help future research in this direction and eventually improve the overall quality of multi-sensory immersive VR systems. This was our initial exploration of multi-sensory cues using our VR system with walking simulation. We chose a small fraction of a much larger design space to investigate as shown in Table 1. We will explore other cues in future studies, in order to solve different problems. We intend to improve the quality of the visual feedback to make it more realistic and to add cues such as head bobbing into the experience, which we believe will make it more realistic and may improve the user experience. We would also like to test our system with other tasks (e.g., games) that make use of these multi-sensory cues in a more direct way to see what differences this makes in the usefulness of these cues. 42
51 References [1] Beckhaus, S., Blom, K. J., & Haringer, M. (2007). ChairIO--the chairbased Interface. Concepts and Technologies for Pervasive Games: A Reader for Pervasive Gaming Research, 1, [2] Bowman, D. A., Davis, E. T., Hodges, L. F., & Badre, A. N. (1999). Maintaining Spatial Orientation during Travel in an Immersive Virtual Environment. Presence: Teleoperators and Virtual Environments, 8(6), [3] Bowman, D. A., Kruijff, E., LaViola, J. J., Jr, & Poupyrev, I. (2004). 3D user interfaces: theory and practice. Addison-Wesley. [4] Buttkicker LFE URL: (Last accessed: September 16 th, 2015) [5] Campos, J. L., & Bülthoff, H. H. (2012). Multimodal Integration during Self-Motion in Virtual Reality. In M. M. Murray & M. T. Wallace (Eds.), The Neural Bases of Multisensory Processes. Boca Raton (FL): CRC Press. [6] Cardin, S., Thalmann, D., & Vexo, F. (2007). Head mounted wind. In proceeding of the 20th annual conference on Computer Animation and Social Agents (CASA2007) (pp ). [7] Chance, S. S., Gaunet, F., Beall, A. C., & Loomis, J. M. (1998). Locomotion Mode Affects the Updating of Objects Encountered During Travel: The Contribution of Vestibular and Proprioceptive Inputs to Path Integration. Presence: Teleoperators and Virtual Environments, 7(2), [8] De Barros, P. G., & Lindeman, R. W. (2014). Multi-sensory urban searchand-rescue robotics: improving the operator s omni-directional perception. Frontiers in Robotics and AI, 1,
52 [9] Debarba, H. G., Grandi, J. G., Oliveski, A., Domingues, D., Maciel, A., & Nedel, L. P. (n.d.). (2009). WindWalker: UsingWind as an Orientation Tool in Virtual Environments. Symposium on Virtual and Augmented Reality (pp ). [10] Deligiannidis, L., & Jacob, R. J. K. (2006). The VR Scooter: Wind and Tactile Feedback Improve User Performance. In Proceedings of the IEEE Symposium on 3D User Interfaces, 2006 (pp ). [11] Feng, M., Lindeman, R. W., Abdel-Moati, H., & Lindeman, J. C. (2015). Haptic ChairIO: A system to study the effect of wind and floor vibration feedback on spatial orientation in VEs. In 3D User Interfaces (3DUI), 2015 IEEE Symposium on (pp ). [12] Heilig, M. L. (1962). Sensorama simulator, US Patent No August. [13] Hollerbach JM (2002) Locomotion interfaces. In: Stanney KM (ed) Handbook of virtual environments. Lawrence Erlbaum, New York, pp [14] Hülsmann, F., Mattar, N., Fröhlich, J., & Wachsmuth, I. (2013). Wind and warmth in virtual reality-requirements and chances. In Proceedings of the Workshop Virtuelle & Erweiterte Realität 2013 (pp ). [15] Klatzky, R. L., Loomis, J. M., Beall, A. C., Chance, S. S., & Golledge, R. G. (1998). Spatial Updating of Self-Position and Orientation During Real, Imagined, and Virtual Locomotion. Psychological Science, 9(4), [16] Kojima, Y., Hashimoto, Y., & Kajimoto, H. (2009). A Novel Wearable Device to Present Localized Sensation of Wind. In Proceedings of the International Conference on Advances in Computer Enterntainment Technology (pp ). New York, NY, USA: ACM. [17] Kulkarni, S. D., Minor, M. A., Deaver, M. W., Pardyjak, E. R., & Hollerbach, J. M. (2012). Design, Sensing, and Control of a Scaled Wind 44
53 Tunnel for Atmospheric Display. Mechatronics, IEEE/ASME Transactions on, 17(4), [18] Kyritsis, M., & Gulliver, S. R. (n.d.). Gilford Zimmerman orientation survey: A validation. In th International Conference on Information, Communications and Signal Processing (ICICS) (pp. 1 4). IEEE. [19] Lecuyer, A., Burkhardt, J.-M., Henaff, J.-M., & Donikian, S. (2006). Camera Motions Improve the Sensation of Walking in Virtual Environments. In Virtual Reality Conference, 2006 (pp ). [20] Lipowski, Z. J. (1975). Sensory and information inputs overload: behavioral effects. Comprehensive Psychiatry, 16(3), [21] Loomis, J. M., Klatzky, R. L., Golledge, R. G., & Philbeck, J. W. (1999). Human navigation by path integration. Wayfinding Behavior: Cognitive Mapping and Other Spatial Processes, [22] Malhotra, N. K. (1984). Information and sensory overload. Psychology and Marketing, 1(3-4), [23] Mohler, Betty J., Sarah H. Creem-Regehr, and William B. Thompson. "The influence of feedback on egocentric distance judgments in real and virtual environments." Proceedings of the 3rd symposium on Applied perception in graphics and visualization. ACM, [24] Moon, T., & Kim, G. J. (2004). Design and Evaluation of a Wind Display for Virtual Reality. In Proceedings of the ACM Symposium on Virtual Reality Software and Technology (pp ). New York, NY, USA: ACM. [25] Nordahl, R. (2005). Self-induced footsteps sounds in virtual reality: Latency, recognition, quality and presence. In The 8th Annual International Workshop on Presence, PRESENCE 2005 (pp ). [26] Papetti, S., & Fontana, F. (2012). Effects of audio-tactile floor augmentation on perception and action during walking: Preliminary results. 45
54 In Proc. of the 9th Sound and Music Computing Conf.,(Copenhagen, Denmark) (pp ). [27] Péruch, P., May, M., & Wartenberg, F. (1997). Homing in virtual environments: effects of field of view and path layout. Perception, 26(3), [28] Popescu, G. V., Burdea, G. C., & Trefftz, H. (2002). Multimodal interaction modeling. Handbook of Virtual Environments: Design, Implementation, and Applications, [29] Presson CC, Montello DR (1994) Updating after rotational and translational body movements: coordinate structure of perspective space. Perception 23(12): [30] Riecke, B. E., & Wiener, J. M. (2007). Can People Not Tell Left from Right in VR? Point-to-origin Studies Revealed Qualitative Errors in Visual Path Integration. In Virtual Reality Conference, VR 07. IEEE (pp. 3 10). [31] Riecke, Bernhard E., and Jörg Schulte-Pelkum. (2013) "Perceptual and cognitive factors for self-motion simulation in virtual environments: how can self-motion illusions ( vection ) be utilized?." Human Walking in Virtual Environments. Springer New York, [32] Sawada, E., Ida, S., Awaji, T., Morishita, K., Aruga, T., Takeichi, R., Fujii, T., Kimura, H., Nakamura, T., Furukawa, M., Shimizu, N., Tokiwa, T., Nii, H., Sugimoto, M., Inami, M.. (2007). BYU-BYU-View: A Wind Communication Interface. In ACM SIGGRAPH 2007 Emerging Technologies. New York, NY, USA: ACM. [33] Swooper Air URL: (Last accessed: September 16 th, 2015) [34] Tan, D. S., Gergle, D., Scupelli, P. G., & Pausch, R. (2004). Physically Large Displays Improve Path Integration in 3D Virtual Navigation Tasks. 46
55 In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems (pp ). New York, NY, USA: ACM. [35] Tan, H. Z., Gray, R., Young, J. J., & Traylor, R. (2003). A haptic back display for attentional and directional cueing. Haptics-E, 3(1), [36] Terziman, L., Marchal, M., Multon, F., Arnaldi, B., & Lecuyer, A. (2012). The King-Kong Effects: Improving sensation of walking in VR with visual and tactile vibrations at each step. In 3D User Interfaces (3DUI), 2012 IEEE Symposium on (pp ). [37] Turchet, L., Burelli, P., & Serafin, S. (2013). Haptic feedback for enhancing realism of walking simulations. IEEE Transactions on Haptics, 6(1), [38] Väljamäe, A., Larsson, P., Västfjäll, D., & Kleiner, M. (2006). Vibrotactile enhancement of auditory-induced self-motion and spatial presence. Journal of the Audio Engineering Society. Audio Engineering Society, 54(10), [39] Verlinden, J. C., Mulder, F. A., Vergeest, J. S., de Jonge, A., Krutiy, D., Nagy, Z., Logeman, B. J., Schouten, P. (2013). Enhancement of Presence in a Virtual Sailing Environment through Localized Wind Simulation. Procedia Engineering, 60, [40] Wan, X., Wang, R. F., & Crowell, J. A. (2013). Effects of Basic Path Properties on Human Path Integration. Spatial Cognition and Computation, 13(1),
56 Appendix A Communication Protocol Category Description Data from VR Simulation String Format Example Acknowledge Overall Set the dimension of the CAVE. SetCaveDone Terminate the hardware Overall and remove all the Reset software data. AddUser AddUser Overall Add a user. (Id should always AddUserDone UpdateUser UpdateUser Overall Update the Wind Set the properties of the fans. (This is for control override of certain @TiltValue=90 Wind Resume regular mode after control override. Resume SetGlobalWind SetGlobalWind Wind Update AddWindObje Wind Add a Wind Object. Radius is Wind Update a Add a Wind Volume. AddWindVolume AddWindVolume (Heading is the AddWindVolu Wind rotation. me the wind speed Done effect.) 1.2#2.2#3.2 48
57 @TunnelEffect=[0-255] Wind Update a Wind @TunnelEffect=50 AddVibrationObject AddVibrationObject Vibration Add a AddVibration Vibration Update a 49



58 Appendix B Grouped Path Visualizations Main Experiment Triangle Path 1 NONE MW FV FS 50


59 MW+FV MW+FS FV+FS ALL 51




60 Main Experiment Triangle Path 2 NONE MW FV FS 52




61 MW+FV MW+FS FV+FS ALL 53

62 Main Experiment Triangle Path 3 NONE MW FV FS 54
63 MW+FV MW+FS FV+FS ALL 55


64 Main Experiment Triangle Path 4 NONE MW FV FS 56



65 MW+FV MW+FS FV+FS ALL 57




66 Main Experiment Triangle Path 5 NONE MW FV FS 58




67 MW+FV MW+FS FV+FS ALL 59


68 Main Experiment Triangle Path 6 NONE MW FV FS 60




69 MW+FV MW+FS FV+FS ALL 61


70 Main Experiment Triangle Path 7 NONE MW FV FS 62

71 MW+FV MW+FS FV+FS ALL 63



72 Main Experiment Triangle Path 8 NONE MW FV FS 64

73 MW+FV MW+FS FV+FS ALL 65



74 Follow-up Experiment Triangle Path 1 NONE DW MW ALL 66



75 Follow-up Experiment Triangle Path 2 NONE DW MW ALL 67
76 Follow-up Experiment Triangle Path 3 NONE DW MW ALL 68

77 Follow-up Experiment Triangle Path 4 NONE DW MW ALL 69
An Initial Exploration of a Multi-Sensory Design Space: Tactile Support for Walking in Immersive Virtual Environments
 An Initial Exploration of a Multi-Sensory Design Space: Tactile Support for Walking in Immersive Virtual Environments Mi Feng* Worcester Polytechnic Institute Arindam Dey HIT Lab Australia Robert W. Lindeman
An Initial Exploration of a Multi-Sensory Design Space: Tactile Support for Walking in Immersive Virtual Environments Mi Feng* Worcester Polytechnic Institute Arindam Dey HIT Lab Australia Robert W. Lindeman
Interactive Simulation: UCF EIN5255. VR Software. Audio Output. Page 4-1
 VR Software Class 4 Dr. Nabil Rami http://www.simulationfirst.com/ein5255/ Audio Output Can be divided into two elements: Audio Generation Audio Presentation Page 4-1 Audio Generation A variety of audio
VR Software Class 4 Dr. Nabil Rami http://www.simulationfirst.com/ein5255/ Audio Output Can be divided into two elements: Audio Generation Audio Presentation Page 4-1 Audio Generation A variety of audio
Title: A Comparison of Different Tactile Output Devices In An Aviation Application
 Page 1 of 6; 12/2/08 Thesis Proposal Title: A Comparison of Different Tactile Output Devices In An Aviation Application Student: Sharath Kanakamedala Advisor: Christopher G. Prince Proposal: (1) Provide
Page 1 of 6; 12/2/08 Thesis Proposal Title: A Comparison of Different Tactile Output Devices In An Aviation Application Student: Sharath Kanakamedala Advisor: Christopher G. Prince Proposal: (1) Provide
Team Breaking Bat Architecture Design Specification. Virtual Slugger
 Department of Computer Science and Engineering The University of Texas at Arlington Team Breaking Bat Architecture Design Specification Virtual Slugger Team Members: Sean Gibeault Brandon Auwaerter Ehidiamen
Department of Computer Science and Engineering The University of Texas at Arlington Team Breaking Bat Architecture Design Specification Virtual Slugger Team Members: Sean Gibeault Brandon Auwaerter Ehidiamen
Effects of Visual-Vestibular Interactions on Navigation Tasks in Virtual Environments
 Effects of Visual-Vestibular Interactions on Navigation Tasks in Virtual Environments Date of Report: September 1 st, 2016 Fellow: Heather Panic Advisors: James R. Lackner and Paul DiZio Institution: Brandeis
Effects of Visual-Vestibular Interactions on Navigation Tasks in Virtual Environments Date of Report: September 1 st, 2016 Fellow: Heather Panic Advisors: James R. Lackner and Paul DiZio Institution: Brandeis
Haptic Camera Manipulation: Extending the Camera In Hand Metaphor
 Haptic Camera Manipulation: Extending the Camera In Hand Metaphor Joan De Boeck, Karin Coninx Expertise Center for Digital Media Limburgs Universitair Centrum Wetenschapspark 2, B-3590 Diepenbeek, Belgium
Haptic Camera Manipulation: Extending the Camera In Hand Metaphor Joan De Boeck, Karin Coninx Expertise Center for Digital Media Limburgs Universitair Centrum Wetenschapspark 2, B-3590 Diepenbeek, Belgium
Feeding human senses through Immersion
 Virtual Reality Feeding human senses through Immersion 1. How many human senses? 2. Overview of key human senses 3. Sensory stimulation through Immersion 4. Conclusion Th3.1 1. How many human senses? [TRV
Virtual Reality Feeding human senses through Immersion 1. How many human senses? 2. Overview of key human senses 3. Sensory stimulation through Immersion 4. Conclusion Th3.1 1. How many human senses? [TRV
A Pilot Study: Introduction of Time-domain Segment to Intensity-based Perception Model of High-frequency Vibration
 A Pilot Study: Introduction of Time-domain Segment to Intensity-based Perception Model of High-frequency Vibration Nan Cao, Hikaru Nagano, Masashi Konyo, Shogo Okamoto 2 and Satoshi Tadokoro Graduate School
A Pilot Study: Introduction of Time-domain Segment to Intensity-based Perception Model of High-frequency Vibration Nan Cao, Hikaru Nagano, Masashi Konyo, Shogo Okamoto 2 and Satoshi Tadokoro Graduate School
Welcome to this course on «Natural Interactive Walking on Virtual Grounds»!
 Welcome to this course on «Natural Interactive Walking on Virtual Grounds»! The speaker is Anatole Lécuyer, senior researcher at Inria, Rennes, France; More information about him at : http://people.rennes.inria.fr/anatole.lecuyer/
Welcome to this course on «Natural Interactive Walking on Virtual Grounds»! The speaker is Anatole Lécuyer, senior researcher at Inria, Rennes, France; More information about him at : http://people.rennes.inria.fr/anatole.lecuyer/
A Step Forward in Virtual Reality. Department of Electrical and Computer Engineering
 A Step Forward in Virtual Reality Team Step Ryan Daly Electrical Engineer Jared Ricci Electrical Engineer Joseph Roberts Electrical Engineer Steven So Electrical Engineer 2 Motivation Current Virtual Reality
A Step Forward in Virtual Reality Team Step Ryan Daly Electrical Engineer Jared Ricci Electrical Engineer Joseph Roberts Electrical Engineer Steven So Electrical Engineer 2 Motivation Current Virtual Reality
Output Devices - Non-Visual
 IMGD 5100: Immersive HCI Output Devices - Non-Visual Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Overview Here we are concerned with
IMGD 5100: Immersive HCI Output Devices - Non-Visual Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Overview Here we are concerned with
Enhanced Collision Perception Using Tactile Feedback
 Department of Computer & Information Science Technical Reports (CIS) University of Pennsylvania Year 2003 Enhanced Collision Perception Using Tactile Feedback Aaron Bloomfield Norman I. Badler University
Department of Computer & Information Science Technical Reports (CIS) University of Pennsylvania Year 2003 Enhanced Collision Perception Using Tactile Feedback Aaron Bloomfield Norman I. Badler University
Haptic presentation of 3D objects in virtual reality for the visually disabled
 Haptic presentation of 3D objects in virtual reality for the visually disabled M Moranski, A Materka Institute of Electronics, Technical University of Lodz, Wolczanska 211/215, Lodz, POLAND marcin.moranski@p.lodz.pl,
Haptic presentation of 3D objects in virtual reality for the visually disabled M Moranski, A Materka Institute of Electronics, Technical University of Lodz, Wolczanska 211/215, Lodz, POLAND marcin.moranski@p.lodz.pl,
From Encoding Sound to Encoding Touch
 From Encoding Sound to Encoding Touch Toktam Mahmoodi King s College London, UK http://www.ctr.kcl.ac.uk/toktam/index.htm ETSI STQ Workshop, May 2017 Immersing a person into the real environment with Very
From Encoding Sound to Encoding Touch Toktam Mahmoodi King s College London, UK http://www.ctr.kcl.ac.uk/toktam/index.htm ETSI STQ Workshop, May 2017 Immersing a person into the real environment with Very
Limits of a Distributed Intelligent Networked Device in the Intelligence Space. 1 Brief History of the Intelligent Space
 Limits of a Distributed Intelligent Networked Device in the Intelligence Space Gyula Max, Peter Szemes Budapest University of Technology and Economics, H-1521, Budapest, Po. Box. 91. HUNGARY, Tel: +36
Limits of a Distributed Intelligent Networked Device in the Intelligence Space Gyula Max, Peter Szemes Budapest University of Technology and Economics, H-1521, Budapest, Po. Box. 91. HUNGARY, Tel: +36
MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL REALITY TECHNOLOGIES
 INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
Enhancing Robot Teleoperator Situation Awareness and Performance using Vibro-tactile and Graphical Feedback
 Enhancing Robot Teleoperator Situation Awareness and Performance using Vibro-tactile and Graphical Feedback by Paulo G. de Barros Robert W. Lindeman Matthew O. Ward Human Interaction in Vortual Environments
Enhancing Robot Teleoperator Situation Awareness and Performance using Vibro-tactile and Graphical Feedback by Paulo G. de Barros Robert W. Lindeman Matthew O. Ward Human Interaction in Vortual Environments
Dynamic Platform for Virtual Reality Applications
 Dynamic Platform for Virtual Reality Applications Jérémy Plouzeau, Jean-Rémy Chardonnet, Frédéric Mérienne To cite this version: Jérémy Plouzeau, Jean-Rémy Chardonnet, Frédéric Mérienne. Dynamic Platform
Dynamic Platform for Virtual Reality Applications Jérémy Plouzeau, Jean-Rémy Chardonnet, Frédéric Mérienne To cite this version: Jérémy Plouzeau, Jean-Rémy Chardonnet, Frédéric Mérienne. Dynamic Platform
A Step Forward in Virtual Reality. Department of Electrical and Computer Engineering
 A Step Forward in Virtual Reality Team Step Ryan Daly Electrical Engineer Jared Ricci Electrical Engineer Joseph Roberts Electrical Engineer Steven So Electrical Engineer 2 Motivation Current Virtual Reality
A Step Forward in Virtual Reality Team Step Ryan Daly Electrical Engineer Jared Ricci Electrical Engineer Joseph Roberts Electrical Engineer Steven So Electrical Engineer 2 Motivation Current Virtual Reality
Chapter 9. Conclusions. 9.1 Summary Perceived distances derived from optic ow
 Chapter 9 Conclusions 9.1 Summary For successful navigation it is essential to be aware of one's own movement direction as well as of the distance travelled. When we walk around in our daily life, we get
Chapter 9 Conclusions 9.1 Summary For successful navigation it is essential to be aware of one's own movement direction as well as of the distance travelled. When we walk around in our daily life, we get
Comparison of Haptic and Non-Speech Audio Feedback
 Comparison of Haptic and Non-Speech Audio Feedback Cagatay Goncu 1 and Kim Marriott 1 Monash University, Mebourne, Australia, cagatay.goncu@monash.edu, kim.marriott@monash.edu Abstract. We report a usability
Comparison of Haptic and Non-Speech Audio Feedback Cagatay Goncu 1 and Kim Marriott 1 Monash University, Mebourne, Australia, cagatay.goncu@monash.edu, kim.marriott@monash.edu Abstract. We report a usability
Multisensory Virtual Environment for Supporting Blind Persons' Acquisition of Spatial Cognitive Mapping a Case Study
 Multisensory Virtual Environment for Supporting Blind Persons' Acquisition of Spatial Cognitive Mapping a Case Study Orly Lahav & David Mioduser Tel Aviv University, School of Education Ramat-Aviv, Tel-Aviv,
Multisensory Virtual Environment for Supporting Blind Persons' Acquisition of Spatial Cognitive Mapping a Case Study Orly Lahav & David Mioduser Tel Aviv University, School of Education Ramat-Aviv, Tel-Aviv,
A Three-Dimensional Evaluation of Body Representation Change of Human Upper Limb Focused on Sense of Ownership and Sense of Agency
 A Three-Dimensional Evaluation of Body Representation Change of Human Upper Limb Focused on Sense of Ownership and Sense of Agency Shunsuke Hamasaki, Atsushi Yamashita and Hajime Asama Department of Precision
A Three-Dimensional Evaluation of Body Representation Change of Human Upper Limb Focused on Sense of Ownership and Sense of Agency Shunsuke Hamasaki, Atsushi Yamashita and Hajime Asama Department of Precision
t t t rt t s s tr t Manuel Martinez 1, Angela Constantinescu 2, Boris Schauerte 1, Daniel Koester 1, and Rainer Stiefelhagen 1,2
 t t t rt t s s Manuel Martinez 1, Angela Constantinescu 2, Boris Schauerte 1, Daniel Koester 1, and Rainer Stiefelhagen 1,2 1 r sr st t t 2 st t t r t r t s t s 3 Pr ÿ t3 tr 2 t 2 t r r t s 2 r t ts ss
t t t rt t s s Manuel Martinez 1, Angela Constantinescu 2, Boris Schauerte 1, Daniel Koester 1, and Rainer Stiefelhagen 1,2 1 r sr st t t 2 st t t r t r t s t s 3 Pr ÿ t3 tr 2 t 2 t r r t s 2 r t ts ss
EVALUATING VISUALIZATION MODES FOR CLOSELY-SPACED PARALLEL APPROACHES
 PROCEEDINGS of the HUMAN FACTORS AND ERGONOMICS SOCIETY 49th ANNUAL MEETING 2005 35 EVALUATING VISUALIZATION MODES FOR CLOSELY-SPACED PARALLEL APPROACHES Ronald Azuma, Jason Fox HRL Laboratories, LLC Malibu,
PROCEEDINGS of the HUMAN FACTORS AND ERGONOMICS SOCIETY 49th ANNUAL MEETING 2005 35 EVALUATING VISUALIZATION MODES FOR CLOSELY-SPACED PARALLEL APPROACHES Ronald Azuma, Jason Fox HRL Laboratories, LLC Malibu,
Paper Body Vibration Effects on Perceived Reality with Multi-modal Contents
 ITE Trans. on MTA Vol. 2, No. 1, pp. 46-5 (214) Copyright 214 by ITE Transactions on Media Technology and Applications (MTA) Paper Body Vibration Effects on Perceived Reality with Multi-modal Contents
ITE Trans. on MTA Vol. 2, No. 1, pp. 46-5 (214) Copyright 214 by ITE Transactions on Media Technology and Applications (MTA) Paper Body Vibration Effects on Perceived Reality with Multi-modal Contents
The Matrix Has You. Realizing Slow Motion in Full-Body Virtual Reality
 The Matrix Has You Realizing Slow Motion in Full-Body Virtual Reality Michael Rietzler Institute of Mediainformatics Ulm University, Germany michael.rietzler@uni-ulm.de Florian Geiselhart Institute of
The Matrix Has You Realizing Slow Motion in Full-Body Virtual Reality Michael Rietzler Institute of Mediainformatics Ulm University, Germany michael.rietzler@uni-ulm.de Florian Geiselhart Institute of
Evaluation of Multi-sensory Feedback in Virtual and Real Remote Environments in a USAR Robot Teleoperation Scenario
 Evaluation of Multi-sensory Feedback in Virtual and Real Remote Environments in a USAR Robot Teleoperation Scenario Committee: Paulo Gonçalves de Barros March 12th, 2014 Professor Robert W Lindeman - Computer
Evaluation of Multi-sensory Feedback in Virtual and Real Remote Environments in a USAR Robot Teleoperation Scenario Committee: Paulo Gonçalves de Barros March 12th, 2014 Professor Robert W Lindeman - Computer
Output Devices - Visual
 IMGD 5100: Immersive HCI Output Devices - Visual Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Overview Here we are concerned with technology
IMGD 5100: Immersive HCI Output Devices - Visual Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Overview Here we are concerned with technology
A Step Forward in Virtual Reality. Department of Electrical and Computer Engineering
 A Step Forward in Virtual Reality Team Step Ryan Daly Electrical Engineer Jared Ricci Electrical Engineer Joseph Roberts Electrical Engineer Steven So Electrical Engineer 2 Motivation Current Virtual Reality
A Step Forward in Virtual Reality Team Step Ryan Daly Electrical Engineer Jared Ricci Electrical Engineer Joseph Roberts Electrical Engineer Steven So Electrical Engineer 2 Motivation Current Virtual Reality
Realtime 3D Computer Graphics Virtual Reality
 Realtime 3D Computer Graphics Virtual Reality Marc Erich Latoschik AI & VR Lab Artificial Intelligence Group University of Bielefeld Virtual Reality (or VR for short) Virtual Reality (or VR for short)
Realtime 3D Computer Graphics Virtual Reality Marc Erich Latoschik AI & VR Lab Artificial Intelligence Group University of Bielefeld Virtual Reality (or VR for short) Virtual Reality (or VR for short)
Air-filled type Immersive Projection Display
 Air-filled type Immersive Projection Display Wataru HASHIMOTO Faculty of Information Science and Technology, Osaka Institute of Technology, 1-79-1, Kitayama, Hirakata, Osaka 573-0196, Japan whashimo@is.oit.ac.jp
Air-filled type Immersive Projection Display Wataru HASHIMOTO Faculty of Information Science and Technology, Osaka Institute of Technology, 1-79-1, Kitayama, Hirakata, Osaka 573-0196, Japan whashimo@is.oit.ac.jp
CSE 165: 3D User Interaction. Lecture #14: 3D UI Design
 CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
Chapter 6. Experiment 3. Motion sickness and vection with normal and blurred optokinetic stimuli
 Chapter 6. Experiment 3. Motion sickness and vection with normal and blurred optokinetic stimuli 6.1 Introduction Chapters 4 and 5 have shown that motion sickness and vection can be manipulated separately
Chapter 6. Experiment 3. Motion sickness and vection with normal and blurred optokinetic stimuli 6.1 Introduction Chapters 4 and 5 have shown that motion sickness and vection can be manipulated separately
Mobile Audio Designs Monkey: A Tool for Audio Augmented Reality
 Mobile Audio Designs Monkey: A Tool for Audio Augmented Reality Bruce N. Walker and Kevin Stamper Sonification Lab, School of Psychology Georgia Institute of Technology 654 Cherry Street, Atlanta, GA,
Mobile Audio Designs Monkey: A Tool for Audio Augmented Reality Bruce N. Walker and Kevin Stamper Sonification Lab, School of Psychology Georgia Institute of Technology 654 Cherry Street, Atlanta, GA,
Tele-Nursing System with Realistic Sensations using Virtual Locomotion Interface
 6th ERCIM Workshop "User Interfaces for All" Tele-Nursing System with Realistic Sensations using Virtual Locomotion Interface Tsutomu MIYASATO ATR Media Integration & Communications 2-2-2 Hikaridai, Seika-cho,
6th ERCIM Workshop "User Interfaces for All" Tele-Nursing System with Realistic Sensations using Virtual Locomotion Interface Tsutomu MIYASATO ATR Media Integration & Communications 2-2-2 Hikaridai, Seika-cho,
The Perception of Optical Flow in Driving Simulators
 University of Iowa Iowa Research Online Driving Assessment Conference 2009 Driving Assessment Conference Jun 23rd, 12:00 AM The Perception of Optical Flow in Driving Simulators Zhishuai Yin Northeastern
University of Iowa Iowa Research Online Driving Assessment Conference 2009 Driving Assessment Conference Jun 23rd, 12:00 AM The Perception of Optical Flow in Driving Simulators Zhishuai Yin Northeastern
Evaluation of Five-finger Haptic Communication with Network Delay
 Tactile Communication Haptic Communication Network Delay Evaluation of Five-finger Haptic Communication with Network Delay To realize tactile communication, we clarify some issues regarding how delay affects
Tactile Communication Haptic Communication Network Delay Evaluation of Five-finger Haptic Communication with Network Delay To realize tactile communication, we clarify some issues regarding how delay affects
Waves Nx VIRTUAL REALITY AUDIO
 Waves Nx VIRTUAL REALITY AUDIO WAVES VIRTUAL REALITY AUDIO THE FUTURE OF AUDIO REPRODUCTION AND CREATION Today s entertainment is on a mission to recreate the real world. Just as VR makes us feel like
Waves Nx VIRTUAL REALITY AUDIO WAVES VIRTUAL REALITY AUDIO THE FUTURE OF AUDIO REPRODUCTION AND CREATION Today s entertainment is on a mission to recreate the real world. Just as VR makes us feel like
Immersive Simulation in Instructional Design Studios
 Blucher Design Proceedings Dezembro de 2014, Volume 1, Número 8 www.proceedings.blucher.com.br/evento/sigradi2014 Immersive Simulation in Instructional Design Studios Antonieta Angulo Ball State University,
Blucher Design Proceedings Dezembro de 2014, Volume 1, Número 8 www.proceedings.blucher.com.br/evento/sigradi2014 Immersive Simulation in Instructional Design Studios Antonieta Angulo Ball State University,
Comparison between audio and tactile systems for delivering simple navigational information to visually impaired pedestrians
 British Journal of Visual Impairment September, 2007 Comparison between audio and tactile systems for delivering simple navigational information to visually impaired pedestrians Dr. Olinkha Gustafson-Pearce,
British Journal of Visual Impairment September, 2007 Comparison between audio and tactile systems for delivering simple navigational information to visually impaired pedestrians Dr. Olinkha Gustafson-Pearce,
ReVRSR: Remote Virtual Reality for Service Robots
 ReVRSR: Remote Virtual Reality for Service Robots Amel Hassan, Ahmed Ehab Gado, Faizan Muhammad March 17, 2018 Abstract This project aims to bring a service robot s perspective to a human user. We believe
ReVRSR: Remote Virtual Reality for Service Robots Amel Hassan, Ahmed Ehab Gado, Faizan Muhammad March 17, 2018 Abstract This project aims to bring a service robot s perspective to a human user. We believe
Vibrotactile Apparent Movement by DC Motors and Voice-coil Tactors
 Vibrotactile Apparent Movement by DC Motors and Voice-coil Tactors Masataka Niwa 1,2, Yasuyuki Yanagida 1, Haruo Noma 1, Kenichi Hosaka 1, and Yuichiro Kume 3,1 1 ATR Media Information Science Laboratories
Vibrotactile Apparent Movement by DC Motors and Voice-coil Tactors Masataka Niwa 1,2, Yasuyuki Yanagida 1, Haruo Noma 1, Kenichi Hosaka 1, and Yuichiro Kume 3,1 1 ATR Media Information Science Laboratories
Amplified Head Rotation in Virtual Reality and the Effects on 3D Search, Training Transfer, and Spatial Orientation
 Amplified Head Rotation in Virtual Reality and the Effects on 3D Search, Training Transfer, and Spatial Orientation Eric D. Ragan, Siroberto Scerbo, Felipe Bacim, and Doug A. Bowman Abstract Many types
Amplified Head Rotation in Virtual Reality and the Effects on 3D Search, Training Transfer, and Spatial Orientation Eric D. Ragan, Siroberto Scerbo, Felipe Bacim, and Doug A. Bowman Abstract Many types
Exploring Surround Haptics Displays
 Exploring Surround Haptics Displays Ali Israr Disney Research 4615 Forbes Ave. Suite 420, Pittsburgh, PA 15213 USA israr@disneyresearch.com Ivan Poupyrev Disney Research 4615 Forbes Ave. Suite 420, Pittsburgh,
Exploring Surround Haptics Displays Ali Israr Disney Research 4615 Forbes Ave. Suite 420, Pittsburgh, PA 15213 USA israr@disneyresearch.com Ivan Poupyrev Disney Research 4615 Forbes Ave. Suite 420, Pittsburgh,
Geo-Located Content in Virtual and Augmented Reality
 Technical Disclosure Commons Defensive Publications Series October 02, 2017 Geo-Located Content in Virtual and Augmented Reality Thomas Anglaret Follow this and additional works at: http://www.tdcommons.org/dpubs_series
Technical Disclosure Commons Defensive Publications Series October 02, 2017 Geo-Located Content in Virtual and Augmented Reality Thomas Anglaret Follow this and additional works at: http://www.tdcommons.org/dpubs_series
The Effect of Frequency Shifting on Audio-Tactile Conversion for Enriching Musical Experience
 The Effect of Frequency Shifting on Audio-Tactile Conversion for Enriching Musical Experience Ryuta Okazaki 1,2, Hidenori Kuribayashi 3, Hiroyuki Kajimioto 1,4 1 The University of Electro-Communications,
The Effect of Frequency Shifting on Audio-Tactile Conversion for Enriching Musical Experience Ryuta Okazaki 1,2, Hidenori Kuribayashi 3, Hiroyuki Kajimioto 1,4 1 The University of Electro-Communications,
Spatial Judgments from Different Vantage Points: A Different Perspective
 Spatial Judgments from Different Vantage Points: A Different Perspective Erik Prytz, Mark Scerbo and Kennedy Rebecca The self-archived postprint version of this journal article is available at Linköping
Spatial Judgments from Different Vantage Points: A Different Perspective Erik Prytz, Mark Scerbo and Kennedy Rebecca The self-archived postprint version of this journal article is available at Linköping
Using Real Objects for Interaction Tasks in Immersive Virtual Environments
 Using Objects for Interaction Tasks in Immersive Virtual Environments Andy Boud, Dr. VR Solutions Pty. Ltd. andyb@vrsolutions.com.au Abstract. The use of immersive virtual environments for industrial applications
Using Objects for Interaction Tasks in Immersive Virtual Environments Andy Boud, Dr. VR Solutions Pty. Ltd. andyb@vrsolutions.com.au Abstract. The use of immersive virtual environments for industrial applications
Head-Movement Evaluation for First-Person Games
 Head-Movement Evaluation for First-Person Games Paulo G. de Barros Computer Science Department Worcester Polytechnic Institute 100 Institute Road. Worcester, MA 01609 USA pgb@wpi.edu Robert W. Lindeman
Head-Movement Evaluation for First-Person Games Paulo G. de Barros Computer Science Department Worcester Polytechnic Institute 100 Institute Road. Worcester, MA 01609 USA pgb@wpi.edu Robert W. Lindeman
Development of A Finger Mounted Type Haptic Device Using A Plane Approximated to Tangent Plane
 Development of A Finger Mounted Type Haptic Device Using A Plane Approximated to Tangent Plane Makoto Yoda Department of Information System Science Graduate School of Engineering Soka University, Soka
Development of A Finger Mounted Type Haptic Device Using A Plane Approximated to Tangent Plane Makoto Yoda Department of Information System Science Graduate School of Engineering Soka University, Soka
HeroX - Untethered VR Training in Sync'ed Physical Spaces
 Page 1 of 6 HeroX - Untethered VR Training in Sync'ed Physical Spaces Above and Beyond - Integrating Robotics In previous research work I experimented with multiple robots remotely controlled by people
Page 1 of 6 HeroX - Untethered VR Training in Sync'ed Physical Spaces Above and Beyond - Integrating Robotics In previous research work I experimented with multiple robots remotely controlled by people
Locomotion in Virtual Reality for Room Scale Tracked Areas
 University of South Florida Scholar Commons Graduate Theses and Dissertations Graduate School 11-10-2016 Locomotion in Virtual Reality for Room Scale Tracked Areas Evren Bozgeyikli University of South
University of South Florida Scholar Commons Graduate Theses and Dissertations Graduate School 11-10-2016 Locomotion in Virtual Reality for Room Scale Tracked Areas Evren Bozgeyikli University of South
Studying the Effects of Stereo, Head Tracking, and Field of Regard on a Small- Scale Spatial Judgment Task
 IEEE TRANSACTIONS ON VISUALIZATION AND COMPUTER GRAPHICS, MANUSCRIPT ID 1 Studying the Effects of Stereo, Head Tracking, and Field of Regard on a Small- Scale Spatial Judgment Task Eric D. Ragan, Regis
IEEE TRANSACTIONS ON VISUALIZATION AND COMPUTER GRAPHICS, MANUSCRIPT ID 1 Studying the Effects of Stereo, Head Tracking, and Field of Regard on a Small- Scale Spatial Judgment Task Eric D. Ragan, Regis
Midi Fighter 3D. User Guide DJTECHTOOLS.COM. Ver 1.03
 Midi Fighter 3D User Guide DJTECHTOOLS.COM Ver 1.03 Introduction This user guide is split in two parts, first covering the Midi Fighter 3D hardware, then the second covering the Midi Fighter Utility and
Midi Fighter 3D User Guide DJTECHTOOLS.COM Ver 1.03 Introduction This user guide is split in two parts, first covering the Midi Fighter 3D hardware, then the second covering the Midi Fighter Utility and
Estimating distances and traveled distances in virtual and real environments
 University of Iowa Iowa Research Online Theses and Dissertations Fall 2011 Estimating distances and traveled distances in virtual and real environments Tien Dat Nguyen University of Iowa Copyright 2011
University of Iowa Iowa Research Online Theses and Dissertations Fall 2011 Estimating distances and traveled distances in virtual and real environments Tien Dat Nguyen University of Iowa Copyright 2011
A Design Study for the Haptic Vest as a Navigation System
 Received January 7, 2013; Accepted March 19, 2013 A Design Study for the Haptic Vest as a Navigation System LI Yan 1, OBATA Yuki 2, KUMAGAI Miyuki 3, ISHIKAWA Marina 4, OWAKI Moeki 5, FUKAMI Natsuki 6,
Received January 7, 2013; Accepted March 19, 2013 A Design Study for the Haptic Vest as a Navigation System LI Yan 1, OBATA Yuki 2, KUMAGAI Miyuki 3, ISHIKAWA Marina 4, OWAKI Moeki 5, FUKAMI Natsuki 6,
Indoor Location Detection
 Indoor Location Detection Arezou Pourmir Abstract: This project is a classification problem and tries to distinguish some specific places from each other. We use the acoustic waves sent from the speaker
Indoor Location Detection Arezou Pourmir Abstract: This project is a classification problem and tries to distinguish some specific places from each other. We use the acoustic waves sent from the speaker
Proprioception & force sensing
 Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Virtual/Augmented Reality (VR/AR) 101
 101") Virtual/Augmented Reality (VR/AR) 101 Dr. Judy M. Vance Virtual Reality Applications Center (VRAC) Mechanical Engineering Department Iowa State University Ames, IA Virtual Reality Virtual Reality Virtual
Virtual/Augmented Reality (VR/AR) 101 Dr. Judy M. Vance Virtual Reality Applications Center (VRAC) Mechanical Engineering Department Iowa State University Ames, IA Virtual Reality Virtual Reality Virtual
A cutaneous stretch device for forearm rotational guidace
 Chapter A cutaneous stretch device for forearm rotational guidace Within the project, physical exercises and rehabilitative activities are paramount aspects for the resulting assistive living environment.
Chapter A cutaneous stretch device for forearm rotational guidace Within the project, physical exercises and rehabilitative activities are paramount aspects for the resulting assistive living environment.
HandsIn3D: Supporting Remote Guidance with Immersive Virtual Environments
 HandsIn3D: Supporting Remote Guidance with Immersive Virtual Environments Weidong Huang 1, Leila Alem 1, and Franco Tecchia 2 1 CSIRO, Australia 2 PERCRO - Scuola Superiore Sant Anna, Italy {Tony.Huang,Leila.Alem}@csiro.au,
HandsIn3D: Supporting Remote Guidance with Immersive Virtual Environments Weidong Huang 1, Leila Alem 1, and Franco Tecchia 2 1 CSIRO, Australia 2 PERCRO - Scuola Superiore Sant Anna, Italy {Tony.Huang,Leila.Alem}@csiro.au,
NAVIGATIONAL CONTROL EFFECT ON REPRESENTING VIRTUAL ENVIRONMENTS
 NAVIGATIONAL CONTROL EFFECT ON REPRESENTING VIRTUAL ENVIRONMENTS Xianjun Sam Zheng, George W. McConkie, and Benjamin Schaeffer Beckman Institute, University of Illinois at Urbana Champaign This present
NAVIGATIONAL CONTROL EFFECT ON REPRESENTING VIRTUAL ENVIRONMENTS Xianjun Sam Zheng, George W. McConkie, and Benjamin Schaeffer Beckman Institute, University of Illinois at Urbana Champaign This present
Development of a Finger Mounted Type Haptic Device Using a Plane Approximated to Tangent Plane
 Journal of Communication and Computer 13 (2016) 329-337 doi:10.17265/1548-7709/2016.07.002 D DAVID PUBLISHING Development of a Finger Mounted Type Haptic Device Using a Plane Approximated to Tangent Plane
Journal of Communication and Computer 13 (2016) 329-337 doi:10.17265/1548-7709/2016.07.002 D DAVID PUBLISHING Development of a Finger Mounted Type Haptic Device Using a Plane Approximated to Tangent Plane
the human chapter 1 Traffic lights the human User-centred Design Light Vision part 1 (modified extract for AISD 2005) Information i/o
 Information i/o") Traffic lights chapter 1 the human part 1 (modified extract for AISD 2005) http://www.baddesigns.com/manylts.html User-centred Design Bad design contradicts facts pertaining to human capabilities Usability
Traffic lights chapter 1 the human part 1 (modified extract for AISD 2005) http://www.baddesigns.com/manylts.html User-centred Design Bad design contradicts facts pertaining to human capabilities Usability
Redirecting Walking and Driving for Natural Navigation in Immersive Virtual Environments
 538 IEEE TRANSACTIONS ON VISUALIZATION AND COMPUTER GRAPHICS, VOL. 18, NO. 4, APRIL 2012 Redirecting Walking and Driving for Natural Navigation in Immersive Virtual Environments Gerd Bruder, Member, IEEE,
538 IEEE TRANSACTIONS ON VISUALIZATION AND COMPUTER GRAPHICS, VOL. 18, NO. 4, APRIL 2012 Redirecting Walking and Driving for Natural Navigation in Immersive Virtual Environments Gerd Bruder, Member, IEEE,
Discrimination of Virtual Haptic Textures Rendered with Different Update Rates
 Discrimination of Virtual Haptic Textures Rendered with Different Update Rates Seungmoon Choi and Hong Z. Tan Haptic Interface Research Laboratory Purdue University 465 Northwestern Avenue West Lafayette,
Discrimination of Virtual Haptic Textures Rendered with Different Update Rates Seungmoon Choi and Hong Z. Tan Haptic Interface Research Laboratory Purdue University 465 Northwestern Avenue West Lafayette,
Haptic Feedback Technology
 Haptic Feedback Technology ECE480: Design Team 4 Application Note Michael Greene Abstract: With the daily interactions between humans and their surrounding technology growing exponentially, the development
Haptic Feedback Technology ECE480: Design Team 4 Application Note Michael Greene Abstract: With the daily interactions between humans and their surrounding technology growing exponentially, the development
The Effect of Haptic Feedback on Basic Social Interaction within Shared Virtual Environments
 The Effect of Haptic Feedback on Basic Social Interaction within Shared Virtual Environments Elias Giannopoulos 1, Victor Eslava 2, María Oyarzabal 2, Teresa Hierro 2, Laura González 2, Manuel Ferre 2,
The Effect of Haptic Feedback on Basic Social Interaction within Shared Virtual Environments Elias Giannopoulos 1, Victor Eslava 2, María Oyarzabal 2, Teresa Hierro 2, Laura González 2, Manuel Ferre 2,
Comparing Leaning-Based Motion Cueing Interfaces for Virtual Reality Locomotion
 Comparing Leaning-Based Motion Cueing s for Virtual Reality Locomotion Alexandra Kitson* Simon Fraser University Surrey, BC, Canada Abraham M. Hashemian** Simon Fraser University Surrey, BC, Canada Ekaterina
Comparing Leaning-Based Motion Cueing s for Virtual Reality Locomotion Alexandra Kitson* Simon Fraser University Surrey, BC, Canada Abraham M. Hashemian** Simon Fraser University Surrey, BC, Canada Ekaterina
The Geometry of Cognitive Maps
 The Geometry of Cognitive Maps Metric vs. Ordinal Structure Marianne Harrison William H. Warren Michael Tarr Brown University Poster presented at Vision ScienceS May 5, 2001 Introduction What geometrical
The Geometry of Cognitive Maps Metric vs. Ordinal Structure Marianne Harrison William H. Warren Michael Tarr Brown University Poster presented at Vision ScienceS May 5, 2001 Introduction What geometrical
Perception of room size and the ability of self localization in a virtual environment. Loudspeaker experiment
 Perception of room size and the ability of self localization in a virtual environment. Loudspeaker experiment Marko Horvat University of Zagreb Faculty of Electrical Engineering and Computing, Zagreb,
Perception of room size and the ability of self localization in a virtual environment. Loudspeaker experiment Marko Horvat University of Zagreb Faculty of Electrical Engineering and Computing, Zagreb,
The Use of Virtual Reality System for Education in Rural Areas
 The Use of Virtual Reality System for Education in Rural Areas Iping Supriana Suwardi 1, Victor 2 Institut Teknologi Bandung, Jl. Ganesha 10 Bandung 40132, Indonesia 1 iping@informatika.org, 2 if13001@students.if.itb.ac.id
The Use of Virtual Reality System for Education in Rural Areas Iping Supriana Suwardi 1, Victor 2 Institut Teknologi Bandung, Jl. Ganesha 10 Bandung 40132, Indonesia 1 iping@informatika.org, 2 if13001@students.if.itb.ac.id
HMD based VR Service Framework. July Web3D Consortium Kwan-Hee Yoo Chungbuk National University
 HMD based VR Service Framework July 31 2017 Web3D Consortium Kwan-Hee Yoo Chungbuk National University khyoo@chungbuk.ac.kr What is Virtual Reality? Making an electronic world seem real and interactive
HMD based VR Service Framework July 31 2017 Web3D Consortium Kwan-Hee Yoo Chungbuk National University khyoo@chungbuk.ac.kr What is Virtual Reality? Making an electronic world seem real and interactive
Bring Imagination to Life with Virtual Reality: Everything You Need to Know About VR for Events
 Bring Imagination to Life with Virtual Reality: Everything You Need to Know About VR for Events 2017 Freeman. All Rights Reserved. 2 The explosive development of virtual reality (VR) technology in recent
Bring Imagination to Life with Virtual Reality: Everything You Need to Know About VR for Events 2017 Freeman. All Rights Reserved. 2 The explosive development of virtual reality (VR) technology in recent
APPEAL DECISION. Appeal No USA. Tokyo, Japan. Tokyo, Japan. Tokyo, Japan. Tokyo, Japan
 APPEAL DECISION Appeal No. 2013-6730 USA Appellant IMMERSION CORPORATION Tokyo, Japan Patent Attorney OKABE, Yuzuru Tokyo, Japan Patent Attorney OCHI, Takao Tokyo, Japan Patent Attorney TAKAHASHI, Seiichiro
APPEAL DECISION Appeal No. 2013-6730 USA Appellant IMMERSION CORPORATION Tokyo, Japan Patent Attorney OKABE, Yuzuru Tokyo, Japan Patent Attorney OCHI, Takao Tokyo, Japan Patent Attorney TAKAHASHI, Seiichiro
Grasping Multisensory Integration: Proprioceptive Capture after Virtual Object Interactions
 Grasping Multisensory Integration: Proprioceptive Capture after Virtual Object Interactions Johannes Lohmann (johannes.lohmann@uni-tuebingen.de) Department of Computer Science, Cognitive Modeling, Sand
Grasping Multisensory Integration: Proprioceptive Capture after Virtual Object Interactions Johannes Lohmann (johannes.lohmann@uni-tuebingen.de) Department of Computer Science, Cognitive Modeling, Sand
TOUCH & FEEL VIRTUAL REALITY. DEVELOPMENT KIT - VERSION NOVEMBER 2017
 TOUCH & FEEL VIRTUAL REALITY DEVELOPMENT KIT - VERSION 1.1 - NOVEMBER 2017 www.neurodigital.es Minimum System Specs Operating System Windows 8.1 or newer Processor AMD Phenom II or Intel Core i3 processor
TOUCH & FEEL VIRTUAL REALITY DEVELOPMENT KIT - VERSION 1.1 - NOVEMBER 2017 www.neurodigital.es Minimum System Specs Operating System Windows 8.1 or newer Processor AMD Phenom II or Intel Core i3 processor
VR for Microsurgery. Design Document. Team: May1702 Client: Dr. Ben-Shlomo Advisor: Dr. Keren Website:
 VR for Microsurgery Design Document Team: May1702 Client: Dr. Ben-Shlomo Advisor: Dr. Keren Email: med-vr@iastate.edu Website: Team Members/Role: Maggie Hollander Leader Eric Edwards Communication Leader
VR for Microsurgery Design Document Team: May1702 Client: Dr. Ben-Shlomo Advisor: Dr. Keren Email: med-vr@iastate.edu Website: Team Members/Role: Maggie Hollander Leader Eric Edwards Communication Leader
Perceptual Characters of Photorealistic See-through Vision in Handheld Augmented Reality
 Perceptual Characters of Photorealistic See-through Vision in Handheld Augmented Reality Arindam Dey PhD Student Magic Vision Lab University of South Australia Supervised by: Dr Christian Sandor and Prof.
Perceptual Characters of Photorealistic See-through Vision in Handheld Augmented Reality Arindam Dey PhD Student Magic Vision Lab University of South Australia Supervised by: Dr Christian Sandor and Prof.
Multi-Modality Fidelity in a Fixed-Base- Fully Interactive Driving Simulator
 Multi-Modality Fidelity in a Fixed-Base- Fully Interactive Driving Simulator Daniel M. Dulaski 1 and David A. Noyce 2 1. University of Massachusetts Amherst 219 Marston Hall Amherst, Massachusetts 01003
Multi-Modality Fidelity in a Fixed-Base- Fully Interactive Driving Simulator Daniel M. Dulaski 1 and David A. Noyce 2 1. University of Massachusetts Amherst 219 Marston Hall Amherst, Massachusetts 01003
MANPADS VIRTUAL REALITY SIMULATOR
 MANPADS VIRTUAL REALITY SIMULATOR SQN LDR Faisal Rashid Pakistan Air Force Adviser: DrAmela Sadagic 2 nd Reader: Erik Johnson 1 AGENDA Problem Space Problem Statement Background Research Questions Approach
MANPADS VIRTUAL REALITY SIMULATOR SQN LDR Faisal Rashid Pakistan Air Force Adviser: DrAmela Sadagic 2 nd Reader: Erik Johnson 1 AGENDA Problem Space Problem Statement Background Research Questions Approach
CSE 190: 3D User Interaction. Lecture #17: 3D UI Evaluation Jürgen P. Schulze, Ph.D.
 CSE 190: 3D User Interaction Lecture #17: 3D UI Evaluation Jürgen P. Schulze, Ph.D. 2 Announcements Final Exam Tuesday, March 19 th, 11:30am-2:30pm, CSE 2154 Sid s office hours in lab 260 this week CAPE
CSE 190: 3D User Interaction Lecture #17: 3D UI Evaluation Jürgen P. Schulze, Ph.D. 2 Announcements Final Exam Tuesday, March 19 th, 11:30am-2:30pm, CSE 2154 Sid s office hours in lab 260 this week CAPE
3500/46M Hydro Monitor
 3500/46M Hydro Monitor Smart Monitoring for the Intelligent Machine Age Mark Snyder Bently Nevada Senior Field Application Engineer mark.snyder@ge.com Older machinery protection systems, and even transmitters
3500/46M Hydro Monitor Smart Monitoring for the Intelligent Machine Age Mark Snyder Bently Nevada Senior Field Application Engineer mark.snyder@ge.com Older machinery protection systems, and even transmitters
Haptic control in a virtual environment
 Haptic control in a virtual environment Gerard de Ruig (0555781) Lourens Visscher (0554498) Lydia van Well (0566644) September 10, 2010 Introduction With modern technological advancements it is entirely
Haptic control in a virtual environment Gerard de Ruig (0555781) Lourens Visscher (0554498) Lydia van Well (0566644) September 10, 2010 Introduction With modern technological advancements it is entirely
Virtual Environments. Ruth Aylett
 Virtual Environments Ruth Aylett Aims of the course 1. To demonstrate a critical understanding of modern VE systems, evaluating the strengths and weaknesses of the current VR technologies 2. To be able
Virtual Environments Ruth Aylett Aims of the course 1. To demonstrate a critical understanding of modern VE systems, evaluating the strengths and weaknesses of the current VR technologies 2. To be able
Human Senses : Vision week 11 Dr. Belal Gharaibeh
 Human Senses : Vision week 11 Dr. Belal Gharaibeh 1 Body senses Seeing Hearing Smelling Tasting Touching Posture of body limbs (Kinesthetic) Motion (Vestibular ) 2 Kinesthetic Perception of stimuli relating
Human Senses : Vision week 11 Dr. Belal Gharaibeh 1 Body senses Seeing Hearing Smelling Tasting Touching Posture of body limbs (Kinesthetic) Motion (Vestibular ) 2 Kinesthetic Perception of stimuli relating
THE PINNACLE OF VIRTUAL REALITY CONTROLLERS
 THE PINNACLE OF VIRTUAL REALITY CONTROLLERS PRODUCT INFORMATION The Manus VR Glove is a high-end data glove that brings intuitive interaction to virtual reality. Its unique design and cutting edge technology
THE PINNACLE OF VIRTUAL REALITY CONTROLLERS PRODUCT INFORMATION The Manus VR Glove is a high-end data glove that brings intuitive interaction to virtual reality. Its unique design and cutting edge technology
VR/AR Concepts in Architecture And Available Tools
 VR/AR Concepts in Architecture And Available Tools Peter Kán Interactive Media Systems Group Institute of Software Technology and Interactive Systems TU Wien Outline 1. What can you do with virtual reality
VR/AR Concepts in Architecture And Available Tools Peter Kán Interactive Media Systems Group Institute of Software Technology and Interactive Systems TU Wien Outline 1. What can you do with virtual reality
revolutionizing Subhead Can Be Placed Here healthcare Anders Gronstedt, Ph.D., President, Gronstedt Group September 22, 2017
 How Presentation virtual reality Title is revolutionizing Subhead Can Be Placed Here healthcare Anders Gronstedt, Ph.D., President, Gronstedt Group September 22, 2017 Please introduce yourself in text
How Presentation virtual reality Title is revolutionizing Subhead Can Be Placed Here healthcare Anders Gronstedt, Ph.D., President, Gronstedt Group September 22, 2017 Please introduce yourself in text
Perception in Immersive Environments
 Perception in Immersive Environments Scott Kuhl Department of Computer Science Augsburg College scott@kuhlweb.com Abstract Immersive environment (virtual reality) systems provide a unique way for researchers
Perception in Immersive Environments Scott Kuhl Department of Computer Science Augsburg College scott@kuhlweb.com Abstract Immersive environment (virtual reality) systems provide a unique way for researchers
Evaluation of a Tricycle-style Teleoperational Interface for Children: a Comparative Experiment with a Video Game Controller
 2012 IEEE RO-MAN: The 21st IEEE International Symposium on Robot and Human Interactive Communication. September 9-13, 2012. Paris, France. Evaluation of a Tricycle-style Teleoperational Interface for Children:
2012 IEEE RO-MAN: The 21st IEEE International Symposium on Robot and Human Interactive Communication. September 9-13, 2012. Paris, France. Evaluation of a Tricycle-style Teleoperational Interface for Children:
Virtual Tactile Maps
 In: H.-J. Bullinger, J. Ziegler, (Eds.). Human-Computer Interaction: Ergonomics and User Interfaces. Proc. HCI International 99 (the 8 th International Conference on Human-Computer Interaction), Munich,
In: H.-J. Bullinger, J. Ziegler, (Eds.). Human-Computer Interaction: Ergonomics and User Interfaces. Proc. HCI International 99 (the 8 th International Conference on Human-Computer Interaction), Munich,
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Lab 7: Introduction to Webots and Sensor Modeling
 Lab 7: Introduction to Webots and Sensor Modeling This laboratory requires the following software: Webots simulator C development tools (gcc, make, etc.) The laboratory duration is approximately two hours.
Lab 7: Introduction to Webots and Sensor Modeling This laboratory requires the following software: Webots simulator C development tools (gcc, make, etc.) The laboratory duration is approximately two hours.
Salient features make a search easy
 Chapter General discussion This thesis examined various aspects of haptic search. It consisted of three parts. In the first part, the saliency of movability and compliance were investigated. In the second
Chapter General discussion This thesis examined various aspects of haptic search. It consisted of three parts. In the first part, the saliency of movability and compliance were investigated. In the second
Detection Thresholds for Rotation and Translation Gains in 360 Video-based Telepresence Systems
 Detection Thresholds for Rotation and Translation Gains in 360 Video-based Telepresence Systems Jingxin Zhang, Eike Langbehn, Dennis Krupke, Nicholas Katzakis and Frank Steinicke, Member, IEEE Fig. 1.
Detection Thresholds for Rotation and Translation Gains in 360 Video-based Telepresence Systems Jingxin Zhang, Eike Langbehn, Dennis Krupke, Nicholas Katzakis and Frank Steinicke, Member, IEEE Fig. 1.
Virtual Mix Room. User Guide
 Virtual Mix Room User Guide TABLE OF CONTENTS Chapter 1 Introduction... 3 1.1 Welcome... 3 1.2 Product Overview... 3 1.3 Components... 4 Chapter 2 Quick Start Guide... 5 Chapter 3 Interface and Controls...
Virtual Mix Room User Guide TABLE OF CONTENTS Chapter 1 Introduction... 3 1.1 Welcome... 3 1.2 Product Overview... 3 1.3 Components... 4 Chapter 2 Quick Start Guide... 5 Chapter 3 Interface and Controls...
Augmented Home. Integrating a Virtual World Game in a Physical Environment. Serge Offermans and Jun Hu
 Augmented Home Integrating a Virtual World Game in a Physical Environment Serge Offermans and Jun Hu Eindhoven University of Technology Department of Industrial Design The Netherlands {s.a.m.offermans,j.hu}@tue.nl
Augmented Home Integrating a Virtual World Game in a Physical Environment Serge Offermans and Jun Hu Eindhoven University of Technology Department of Industrial Design The Netherlands {s.a.m.offermans,j.hu}@tue.nl
3D User Interaction CS-525U: Robert W. Lindeman. Intro to 3D UI. Department of Computer Science. Worcester Polytechnic Institute.
 CS-525U: 3D User Interaction Intro to 3D UI Robert W. Lindeman Worcester Polytechnic Institute Department of Computer Science gogo@wpi.edu Why Study 3D UI? Relevant to real-world tasks Can use familiarity
CS-525U: 3D User Interaction Intro to 3D UI Robert W. Lindeman Worcester Polytechnic Institute Department of Computer Science gogo@wpi.edu Why Study 3D UI? Relevant to real-world tasks Can use familiarity