Immersive Interaction Group
|
|
|
- Michael Sims
- 5 years ago
- Views:
Transcription









1 Immersive Interaction Group


 was founded d in July 1988 by Prof. D. Thalmann.")

 is Group ldb led by Dr Ronan Boulic.")
2 EPFL is one of the two Swiss Federal Institutes of Technology. With the status of a national school since 1969, the young engineering school has grown in many dimensions, to the extent of becoming one of the most famous European institutions of science and technology. Core data: 11'000 persons on campus, including 8'500 students (Ba, Ms, PhD), 350 labs The Virtual Reality Laboratory Lb (VRLAB) was founded d in July 1988 by Prof. D. Thalmann. The laboratory participated to 37 european projects (STREP, IP, NoE) and 13 national projects. Dr R. Boulic was hired on December 1989 ; on February 2011 he founded the research group in Immersive Interactions (IIG) after the VRLAB closed due to the retirement of Prof. Thalmann. Immersive Interaction The Immersive Interaction Group (IIG) is Group ldb led by Dr Ronan Boulic. We are currently involved in the EU IP project Cyberemotions and 3 national SNF projects: Synergia AerialCrowds, Interactive Optimization of Mobile Articulated Structures, and Embodied Interactions.
: confering autonomy to virtual humans in their interaction with")



3 Virtual Mannequin and Situated Interactions expertise Virtual Mannequin (VM): confering autonomy to virtual humans in their interaction with their environment ~ Algorithmic framework for real-time postural control ~ Integrates collision avoidance ~ Data-based motion models: full-body reach, locomotion Situated interactions for Virtual Prototyping ~ Embodied interactions with real-time full-body motion capture ~ Versatile embodiment of target population The person responsible to evaluate a virtual prototype should be able to intuitively iti control a large range of potential users
4 Virtual Mannequin (1): Priorities among a set of reach, gaze and balance tasks. a b c d e f The left hand has to reach a (yellow/red) target and the mannequin has to continuously lookat the target while keeping the feet onthe groundand maintaining balance. Our framework allows the integration of multiple levels of strict priority among tasks, i.e. the bl balance task must always be enforced whereas the reach task kis only enforced as much as possible after balance is ensured (c f). The tasks decoupling is ensured with projection operators in real time [BB04]. [BB04] P. Baerlocher, R. Boulic, «An Inverse Kinematic Architecture Enforcing an Arbitrary Number of Strict Priority Levels», The Visual Computer, Springer Verlag, 20(6), 2004, pp
5 Virtual Mannequin (2): collision avoidance through damped displacements. a b c d e f g h The left hand has to reach a mobile target moving along the dashed blue line and the Virtual Mannequin has to continuously look at the mobile target Collision i avoidance is ensured through htemporary damped ddisplacement tasks when some body parts move towards nearby obstacles (visualized as line segments in d g). Our framework allows priority levels to dynamically change during the convergence to accomodate to the risk level, i.e. the damping task priority increases as the body part is getting closer to the obstacle [PMMRDB09]. [PMMRDB09] M. Peinado, D. Meziat, D. Maupu, D. Raunhardt, D. Thalmann, R. Boulic, Full Body Avatar Control with Environment Awareness, in IEEE Computer Graphics and Applications, vol. 29, p , 2009.
 allow to build normalized motion models for the full body")

![being associated with a priority level too [RB09].](/docs-images/88/115298668/images/6-2.jpg "For example the left hand orientation i task (maintaining i i the bottle vertical lin Fig")

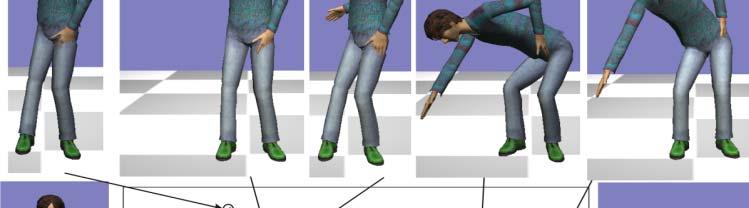
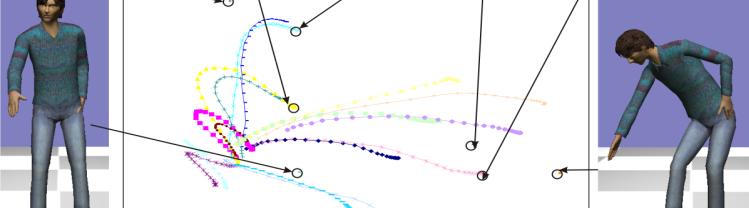
6 Virtual Mannequin (3): combining with data-based synergies. a b c Captured motion dabases (a) allow to build normalized motion models for the full body applicable to the full spectrum of Virtual Mannequins (b). Our framework can integrate such rich information as a task guiding the convergence while being associated with a priority level too [RB09]. For example the left hand orientation i task (maintaining i i the bottle vertical lin Fig c) is given a higher h priority i than the data based reach task of the right hand. However, the data based reach task will be achieved as much as possible without perturbating the orientation task. [RB09] D. Raunhardt,R. Boulic, Motion constraint, The Visual Computer 25: (2009).










7 Situated interactions for Virtual Prototyping (1) Embodied interactions with large screen or CAVE with full-body motion capture.

 Versatile")



?")
?")





8 Situated interactions for Virtual Prototyping (2) Versatile embodiment of target population; p at what scale should the virtual environment be displayed : - User scale (visuocentric)? - Target scale (egocentric)? Scenario : Move according to a child's perception of space Visuocentric strategy Egocentric strategy R. Boulic, D Maupu, D Thalmann, On Scaling Strategies for the Full Body Interaction with Virtual Mannequins, Journal Interacting with Computers, 21(1 2), 11:25 (2009)
9 Virtual Mannequin and Situated Interactions future work Algorithmic fast posture reconstruction in cluttered virtual environments Combining multiple statistical models of human actions and behaviors based on motion captured data Immersive embodied interactions Assess new types of immersion and scene display to optimally exploit CPU- GPU resources. Collaboration with cognitive neuroscience lab. Exploit full-body input for intuitive evaluation of complex environments Other applications: rehabilitation, treatment of phobia,
Craig Barnes. Previous Work. Introduction. Tools for Programming Agents
 From: AAAI Technical Report SS-00-04. Compilation copyright 2000, AAAI (www.aaai.org). All rights reserved. Visual Programming Agents for Virtual Environments Craig Barnes Electronic Visualization Lab
From: AAAI Technical Report SS-00-04. Compilation copyright 2000, AAAI (www.aaai.org). All rights reserved. Visual Programming Agents for Virtual Environments Craig Barnes Electronic Visualization Lab
ACE: A Platform for the Real Time Simulation of Virtual Human Agents
 ACE: A Platform for the Real Time Simulation of Virtual Human Agents Marcelo Kallmann, Jean-Sébastien Monzani, Angela Caicedo and Daniel Thalmann EPFL Computer Graphics Lab LIG CH-1015 Lausanne Switzerland
ACE: A Platform for the Real Time Simulation of Virtual Human Agents Marcelo Kallmann, Jean-Sébastien Monzani, Angela Caicedo and Daniel Thalmann EPFL Computer Graphics Lab LIG CH-1015 Lausanne Switzerland
LASA I PRESS KIT lasa.epfl.ch I EPFL-STI-IMT-LASA Station 9 I CH 1015, Lausanne, Switzerland
 LASA I PRESS KIT 2016 LASA I OVERVIEW LASA (Learning Algorithms and Systems Laboratory) at EPFL, focuses on machine learning applied to robot control, humanrobot interaction and cognitive robotics at large.
LASA I PRESS KIT 2016 LASA I OVERVIEW LASA (Learning Algorithms and Systems Laboratory) at EPFL, focuses on machine learning applied to robot control, humanrobot interaction and cognitive robotics at large.
Job Description. Commitment: Must be available to work full-time hours, M-F for weeks beginning Summer of 2018.
 Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery
 Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Haptic Feedback in Mixed-Reality Environment
 The Visual Computer manuscript No. (will be inserted by the editor) Haptic Feedback in Mixed-Reality Environment Renaud Ott, Daniel Thalmann, Frédéric Vexo Virtual Reality Laboratory (VRLab) École Polytechnique
The Visual Computer manuscript No. (will be inserted by the editor) Haptic Feedback in Mixed-Reality Environment Renaud Ott, Daniel Thalmann, Frédéric Vexo Virtual Reality Laboratory (VRLab) École Polytechnique
Interactive Ergonomic Analysis of a Physically Disabled Person s Workplace
 Interactive Ergonomic Analysis of a Physically Disabled Person s Workplace Matthieu Aubry, Frédéric Julliard, Sylvie Gibet To cite this version: Matthieu Aubry, Frédéric Julliard, Sylvie Gibet. Interactive
Interactive Ergonomic Analysis of a Physically Disabled Person s Workplace Matthieu Aubry, Frédéric Julliard, Sylvie Gibet To cite this version: Matthieu Aubry, Frédéric Julliard, Sylvie Gibet. Interactive
AI Framework for Decision Modeling in Behavioral Animation of Virtual Avatars
 AI Framework for Decision Modeling in Behavioral Animation of Virtual Avatars A. Iglesias 1 and F. Luengo 2 1 Department of Applied Mathematics and Computational Sciences, University of Cantabria, Avda.
AI Framework for Decision Modeling in Behavioral Animation of Virtual Avatars A. Iglesias 1 and F. Luengo 2 1 Department of Applied Mathematics and Computational Sciences, University of Cantabria, Avda.
School of Computer Science. Course Title: Introduction to Human-Computer Interaction Date: 8/16/11
 Course Title: Introduction to Human-Computer Interaction Date: 8/16/11 Course Number: CEN-371 Number of Credits: 3 Subject Area: Computer Systems Subject Area Coordinator: Christine Lisetti email: lisetti@cis.fiu.edu
Course Title: Introduction to Human-Computer Interaction Date: 8/16/11 Course Number: CEN-371 Number of Credits: 3 Subject Area: Computer Systems Subject Area Coordinator: Christine Lisetti email: lisetti@cis.fiu.edu
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation
 Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
VIEW: Visual Interactive Effective Worlds Lorentz Center International Center for workshops in the Sciences June Dr.
 Virtual Reality & Presence VIEW: Visual Interactive Effective Worlds Lorentz Center International Center for workshops in the Sciences 25-27 June 2007 Dr. Frederic Vexo Virtual Reality & Presence Outline:
Virtual Reality & Presence VIEW: Visual Interactive Effective Worlds Lorentz Center International Center for workshops in the Sciences 25-27 June 2007 Dr. Frederic Vexo Virtual Reality & Presence Outline:
State of the Science Symposium
 State of the Science Symposium Virtual Reality and Physical Rehabilitation: A New Toy or a New Research and Rehabilitation Tool? Emily A. Keshner Department of Physical Therapy College of Health Professions
State of the Science Symposium Virtual Reality and Physical Rehabilitation: A New Toy or a New Research and Rehabilitation Tool? Emily A. Keshner Department of Physical Therapy College of Health Professions
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
MSMS Software for VR Simulations of Neural Prostheses and Patient Training and Rehabilitation
 MSMS Software for VR Simulations of Neural Prostheses and Patient Training and Rehabilitation Rahman Davoodi and Gerald E. Loeb Department of Biomedical Engineering, University of Southern California Abstract.
MSMS Software for VR Simulations of Neural Prostheses and Patient Training and Rehabilitation Rahman Davoodi and Gerald E. Loeb Department of Biomedical Engineering, University of Southern California Abstract.
Evaluation of Guidance Systems in Public Infrastructures Using Eye Tracking in an Immersive Virtual Environment
 Evaluation of Guidance Systems in Public Infrastructures Using Eye Tracking in an Immersive Virtual Environment Helmut Schrom-Feiertag 1, Christoph Schinko 2, Volker Settgast 3, and Stefan Seer 1 1 Austrian
Evaluation of Guidance Systems in Public Infrastructures Using Eye Tracking in an Immersive Virtual Environment Helmut Schrom-Feiertag 1, Christoph Schinko 2, Volker Settgast 3, and Stefan Seer 1 1 Austrian
Driver Assistance for "Keeping Hands on the Wheel and Eyes on the Road"
 ICVES 2009 Driver Assistance for "Keeping Hands on the Wheel and Eyes on the Road" Cuong Tran and Mohan Manubhai Trivedi Laboratory for Intelligent and Safe Automobiles (LISA) University of California
ICVES 2009 Driver Assistance for "Keeping Hands on the Wheel and Eyes on the Road" Cuong Tran and Mohan Manubhai Trivedi Laboratory for Intelligent and Safe Automobiles (LISA) University of California
University of Geneva. Presentation of the CISA-CIN-BBL v. 2.3
 University of Geneva Presentation of the CISA-CIN-BBL 17.05.2018 v. 2.3 1 Evolution table Revision Date Subject 0.1 06.02.2013 Document creation. 1.0 08.02.2013 Contents added 1.5 12.02.2013 Some parts
University of Geneva Presentation of the CISA-CIN-BBL 17.05.2018 v. 2.3 1 Evolution table Revision Date Subject 0.1 06.02.2013 Document creation. 1.0 08.02.2013 Contents added 1.5 12.02.2013 Some parts
Perspectives of Embedded Systems Engineering in the EU framework programme for research
 Perspectives of Embedded Systems Engineering in the EU framework programme for research ARTEMIS Spring meeting 2012 Nürnberg, 29 February 2012 Dr. Werner Steinhögl Project Officer Embedded Systems and
Perspectives of Embedded Systems Engineering in the EU framework programme for research ARTEMIS Spring meeting 2012 Nürnberg, 29 February 2012 Dr. Werner Steinhögl Project Officer Embedded Systems and
A New Architecture for Simulating the Behavior of Virtual Agents
 A New Architecture for Simulating the Behavior of Virtual Agents F. Luengo 1,2 and A. Iglesias 2 1 Department of Computer Science, University of Zulia, Post Office Box #527, Maracaibo, Venezuela fluengo@cantv.net
A New Architecture for Simulating the Behavior of Virtual Agents F. Luengo 1,2 and A. Iglesias 2 1 Department of Computer Science, University of Zulia, Post Office Box #527, Maracaibo, Venezuela fluengo@cantv.net
Cognition & Robotics. EUCog - European Network for the Advancement of Artificial Cognitive Systems, Interaction and Robotics
 Cognition & Robotics Recent debates in Cognitive Robotics bring about ways to seek a definitional connection between cognition and robotics, ponder upon the questions: EUCog - European Network for the
Cognition & Robotics Recent debates in Cognitive Robotics bring about ways to seek a definitional connection between cognition and robotics, ponder upon the questions: EUCog - European Network for the
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
SMart wearable Robotic Teleoperated surgery
 SMart wearable Robotic Teleoperated surgery This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 732515 Context Minimally
SMart wearable Robotic Teleoperated surgery This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 732515 Context Minimally
APPLICATIONS OF VIRTUAL REALITY TO NUCLEAR SAFEGUARDS
 APPLICATIONS OF VIRTUAL REALITY TO NUCLEAR SAFEGUARDS Sharon Stansfield Sandia National Laboratories Albuquerque, NM USA ABSTRACT This paper explores two potential applications of Virtual Reality (VR)
APPLICATIONS OF VIRTUAL REALITY TO NUCLEAR SAFEGUARDS Sharon Stansfield Sandia National Laboratories Albuquerque, NM USA ABSTRACT This paper explores two potential applications of Virtual Reality (VR)
Aging Algorithm for Anthropometric Digital Humans: Quantitative Estimation for Ergonomic Applications
 Aging Algorithm for Anthropometric Digital Humans: Quantitative Estimation for Ergonomic Applications P V Hareesh, T.Kimura, K Sawada and D. Thalmann. Abstract This paper introduces an approach to estimate
Aging Algorithm for Anthropometric Digital Humans: Quantitative Estimation for Ergonomic Applications P V Hareesh, T.Kimura, K Sawada and D. Thalmann. Abstract This paper introduces an approach to estimate
Multiple Presence through Auditory Bots in Virtual Environments
 Multiple Presence through Auditory Bots in Virtual Environments Martin Kaltenbrunner FH Hagenberg Hauptstrasse 117 A-4232 Hagenberg Austria modin@yuri.at Avon Huxor (Corresponding author) Centre for Electronic
Multiple Presence through Auditory Bots in Virtual Environments Martin Kaltenbrunner FH Hagenberg Hauptstrasse 117 A-4232 Hagenberg Austria modin@yuri.at Avon Huxor (Corresponding author) Centre for Electronic
Digitalisation as day-to-day-business
 Digitalisation as day-to-day-business What is today feasible for the company in the future Prof. Jivka Ovtcharova INSTITUTE FOR INFORMATION MANAGEMENT IN ENGINEERING Baden-Württemberg Driving force for
Digitalisation as day-to-day-business What is today feasible for the company in the future Prof. Jivka Ovtcharova INSTITUTE FOR INFORMATION MANAGEMENT IN ENGINEERING Baden-Württemberg Driving force for
DESIGN STYLE FOR BUILDING INTERIOR 3D OBJECTS USING MARKER BASED AUGMENTED REALITY
 DESIGN STYLE FOR BUILDING INTERIOR 3D OBJECTS USING MARKER BASED AUGMENTED REALITY 1 RAJU RATHOD, 2 GEORGE PHILIP.C, 3 VIJAY KUMAR B.P 1,2,3 MSRIT Bangalore Abstract- To ensure the best place, position,
DESIGN STYLE FOR BUILDING INTERIOR 3D OBJECTS USING MARKER BASED AUGMENTED REALITY 1 RAJU RATHOD, 2 GEORGE PHILIP.C, 3 VIJAY KUMAR B.P 1,2,3 MSRIT Bangalore Abstract- To ensure the best place, position,
Improving Vehicle Comfort and Safety Using Digital Human Modeling
 Improving Vehicle Comfort and Safety Using Digital Human Modeling Matthew P. Reed, PhD Research Associate Professor Head, Biosciences Group, UMTRI Director, Human Motion Simulation Lab, Center for Ergonomics,
Improving Vehicle Comfort and Safety Using Digital Human Modeling Matthew P. Reed, PhD Research Associate Professor Head, Biosciences Group, UMTRI Director, Human Motion Simulation Lab, Center for Ergonomics,
Architecting Systems of the Future, page 1
 Architecting Systems of the Future featuring Eric Werner interviewed by Suzanne Miller ---------------------------------------------------------------------------------------------Suzanne Miller: Welcome
Architecting Systems of the Future featuring Eric Werner interviewed by Suzanne Miller ---------------------------------------------------------------------------------------------Suzanne Miller: Welcome
Head-Movement Evaluation for First-Person Games
 Head-Movement Evaluation for First-Person Games Paulo G. de Barros Computer Science Department Worcester Polytechnic Institute 100 Institute Road. Worcester, MA 01609 USA pgb@wpi.edu Robert W. Lindeman
Head-Movement Evaluation for First-Person Games Paulo G. de Barros Computer Science Department Worcester Polytechnic Institute 100 Institute Road. Worcester, MA 01609 USA pgb@wpi.edu Robert W. Lindeman
S.P.Q.R. Legged Team Report from RoboCup 2003
 S.P.Q.R. Legged Team Report from RoboCup 2003 L. Iocchi and D. Nardi Dipartimento di Informatica e Sistemistica Universitá di Roma La Sapienza Via Salaria 113-00198 Roma, Italy {iocchi,nardi}@dis.uniroma1.it,
S.P.Q.R. Legged Team Report from RoboCup 2003 L. Iocchi and D. Nardi Dipartimento di Informatica e Sistemistica Universitá di Roma La Sapienza Via Salaria 113-00198 Roma, Italy {iocchi,nardi}@dis.uniroma1.it,
VIRTUAL TOUCH. Product Software IPP: INTERACTIVE PHYSICS PACK
 IPP: INTERACTIVE PHYSICS PACK IPP is an add-on for Virtools Dev, dedicated to interactive physics. IPP is based on IPSI (Interactive Physics Simulation Interface), which incorporates algorithms of CEA
IPP: INTERACTIVE PHYSICS PACK IPP is an add-on for Virtools Dev, dedicated to interactive physics. IPP is based on IPSI (Interactive Physics Simulation Interface), which incorporates algorithms of CEA
YOUR GATEWAY TO ENDLESS OPPORTUNITIES
 IMPROVE HUMAN PERFORMANCE YOUR GATEWAY TO ENDLESS OPPORTUNITIES Setting standards for human movement research and treatment 1 EMPOWERING YOUR AMBITION Innovative technologies enable scientists to carry
IMPROVE HUMAN PERFORMANCE YOUR GATEWAY TO ENDLESS OPPORTUNITIES Setting standards for human movement research and treatment 1 EMPOWERING YOUR AMBITION Innovative technologies enable scientists to carry
Framework for Simulating the Human Behavior for Intelligent Virtual Agents. Part I: Framework Architecture
 Framework for Simulating the Human Behavior for Intelligent Virtual Agents. Part I: Framework Architecture F. Luengo 1,2 and A. Iglesias 2 1 Department of Computer Science, University of Zulia, Post Office
Framework for Simulating the Human Behavior for Intelligent Virtual Agents. Part I: Framework Architecture F. Luengo 1,2 and A. Iglesias 2 1 Department of Computer Science, University of Zulia, Post Office
PERCEPTUAL AND SOCIAL FIDELITY OF AVATARS AND AGENTS IN VIRTUAL REALITY. Benjamin R. Kunz, Ph.D. Department Of Psychology University Of Dayton
 PERCEPTUAL AND SOCIAL FIDELITY OF AVATARS AND AGENTS IN VIRTUAL REALITY Benjamin R. Kunz, Ph.D. Department Of Psychology University Of Dayton MAICS 2016 Virtual Reality: A Powerful Medium Computer-generated
PERCEPTUAL AND SOCIAL FIDELITY OF AVATARS AND AGENTS IN VIRTUAL REALITY Benjamin R. Kunz, Ph.D. Department Of Psychology University Of Dayton MAICS 2016 Virtual Reality: A Powerful Medium Computer-generated
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
A FRAMEWORK FOR TELEPRESENT GAME-PLAY IN LARGE VIRTUAL ENVIRONMENTS
 A FRAMEWORK FOR TELEPRESENT GAME-PLAY IN LARGE VIRTUAL ENVIRONMENTS Patrick Rößler, Frederik Beutler, and Uwe D. Hanebeck Intelligent Sensor-Actuator-Systems Laboratory Institute of Computer Science and
A FRAMEWORK FOR TELEPRESENT GAME-PLAY IN LARGE VIRTUAL ENVIRONMENTS Patrick Rößler, Frederik Beutler, and Uwe D. Hanebeck Intelligent Sensor-Actuator-Systems Laboratory Institute of Computer Science and
NTU Robot PAL 2009 Team Report
 NTU Robot PAL 2009 Team Report Chieh-Chih Wang, Shao-Chen Wang, Hsiao-Chieh Yen, and Chun-Hua Chang The Robot Perception and Learning Laboratory Department of Computer Science and Information Engineering
NTU Robot PAL 2009 Team Report Chieh-Chih Wang, Shao-Chen Wang, Hsiao-Chieh Yen, and Chun-Hua Chang The Robot Perception and Learning Laboratory Department of Computer Science and Information Engineering
Passive haptic feedback for manual assembly simulation
 Available online at www.sciencedirect.com Procedia CIRP 7 (2013 ) 509 514 Forty Sixth CIRP Conference on Manufacturing Systems 2013 Passive haptic feedback for manual assembly simulation Néstor Andrés
Available online at www.sciencedirect.com Procedia CIRP 7 (2013 ) 509 514 Forty Sixth CIRP Conference on Manufacturing Systems 2013 Passive haptic feedback for manual assembly simulation Néstor Andrés
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS. Nuno Sousa Eugénio Oliveira
 AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
Characterizing Embodied Interaction in First and Third Person Perspective Viewpoints
 Characterizing Embodied Interaction in First and Third Person Perspective Viewpoints Henrique G. Debarba 1 Eray Molla 1 Bruno Herbelin 2 Ronan Boulic 1 1 Immersive Interaction Group, 2 Center for Neuroprosthetics
Characterizing Embodied Interaction in First and Third Person Perspective Viewpoints Henrique G. Debarba 1 Eray Molla 1 Bruno Herbelin 2 Ronan Boulic 1 1 Immersive Interaction Group, 2 Center for Neuroprosthetics
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
FRAUNHOFER INSTITUT FOR MANUFACTURING ENGINEERING AND AUTOMATION IPA DRIVE SYSTEMS AND EXOSKELETONS
 FRAUNHOFER INSTITUT FOR MANUFACTURING ENGINEERING AND AUTOMATION IPA DRIVE SYSTEMS AND EXOSKELETONS WHAT DRIVES US Mobility is a basic human need. As the demographic change continues, this is increasingly
FRAUNHOFER INSTITUT FOR MANUFACTURING ENGINEERING AND AUTOMATION IPA DRIVE SYSTEMS AND EXOSKELETONS WHAT DRIVES US Mobility is a basic human need. As the demographic change continues, this is increasingly
H2020 RIA COMANOID H2020-RIA
 Ref. Ares(2016)2533586-01/06/2016 H2020 RIA COMANOID H2020-RIA-645097 Deliverable D4.1: Demonstrator specification report M6 D4.1 H2020-RIA-645097 COMANOID M6 Project acronym: Project full title: COMANOID
Ref. Ares(2016)2533586-01/06/2016 H2020 RIA COMANOID H2020-RIA-645097 Deliverable D4.1: Demonstrator specification report M6 D4.1 H2020-RIA-645097 COMANOID M6 Project acronym: Project full title: COMANOID
Evaluating Collision Avoidance Effects on Discomfort in Virtual Environments
 Evaluating Collision Avoidance Effects on Discomfort in Virtual Environments Nick Sohre, Charlie Mackin, Victoria Interrante, and Stephen J. Guy Department of Computer Science University of Minnesota {sohre007,macki053,interran,sjguy}@umn.edu
Evaluating Collision Avoidance Effects on Discomfort in Virtual Environments Nick Sohre, Charlie Mackin, Victoria Interrante, and Stephen J. Guy Department of Computer Science University of Minnesota {sohre007,macki053,interran,sjguy}@umn.edu
ENHANCED HUMAN-AGENT INTERACTION: AUGMENTING INTERACTION MODELS WITH EMBODIED AGENTS BY SERAFIN BENTO. MASTER OF SCIENCE in INFORMATION SYSTEMS
 BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Capability for Collision Avoidance of Different User Avatars in Virtual Reality
 Capability for Collision Avoidance of Different User Avatars in Virtual Reality Adrian H. Hoppe, Roland Reeb, Florian van de Camp, and Rainer Stiefelhagen Karlsruhe Institute of Technology (KIT) {adrian.hoppe,rainer.stiefelhagen}@kit.edu,
Capability for Collision Avoidance of Different User Avatars in Virtual Reality Adrian H. Hoppe, Roland Reeb, Florian van de Camp, and Rainer Stiefelhagen Karlsruhe Institute of Technology (KIT) {adrian.hoppe,rainer.stiefelhagen}@kit.edu,
A Multimodal Locomotion User Interface for Immersive Geospatial Information Systems
 F. Steinicke, G. Bruder, H. Frenz 289 A Multimodal Locomotion User Interface for Immersive Geospatial Information Systems Frank Steinicke 1, Gerd Bruder 1, Harald Frenz 2 1 Institute of Computer Science,
F. Steinicke, G. Bruder, H. Frenz 289 A Multimodal Locomotion User Interface for Immersive Geospatial Information Systems Frank Steinicke 1, Gerd Bruder 1, Harald Frenz 2 1 Institute of Computer Science,
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
CSE 190: 3D User Interaction. Lecture #17: 3D UI Evaluation Jürgen P. Schulze, Ph.D.
 CSE 190: 3D User Interaction Lecture #17: 3D UI Evaluation Jürgen P. Schulze, Ph.D. 2 Announcements Final Exam Tuesday, March 19 th, 11:30am-2:30pm, CSE 2154 Sid s office hours in lab 260 this week CAPE
CSE 190: 3D User Interaction Lecture #17: 3D UI Evaluation Jürgen P. Schulze, Ph.D. 2 Announcements Final Exam Tuesday, March 19 th, 11:30am-2:30pm, CSE 2154 Sid s office hours in lab 260 this week CAPE
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine)
") Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
COS 140: Foundations of Computer Science
 COS 140: Foundations of C S What is C S? Fall 2017 Copyright c 2002 2017 UMaine School of Computing and Information S 1 / 16 What is C S? What do you think? A definition CS and programming Areas of CS
COS 140: Foundations of C S What is C S? Fall 2017 Copyright c 2002 2017 UMaine School of Computing and Information S 1 / 16 What is C S? What do you think? A definition CS and programming Areas of CS
Prof. Dr. Peter Wiedemann Karlsruhe Institute of Technology Germany
 The main objective and activities of the European Cooperation in the Field of Scientific and Technical Research on Potential Health Effects from Emerging Wireless Communication Systems Emerging EMF Technologies
The main objective and activities of the European Cooperation in the Field of Scientific and Technical Research on Potential Health Effects from Emerging Wireless Communication Systems Emerging EMF Technologies
SPQR RoboCup 2016 Standard Platform League Qualification Report
 SPQR RoboCup 2016 Standard Platform League Qualification Report V. Suriani, F. Riccio, L. Iocchi, D. Nardi Dipartimento di Ingegneria Informatica, Automatica e Gestionale Antonio Ruberti Sapienza Università
SPQR RoboCup 2016 Standard Platform League Qualification Report V. Suriani, F. Riccio, L. Iocchi, D. Nardi Dipartimento di Ingegneria Informatica, Automatica e Gestionale Antonio Ruberti Sapienza Università
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Developing a GPU Processing Framework for Accelerating Remote Sensing Algorithms
 19 October 2010 Research and Industrial Collaboration Conference Research to Reality Northeastern University, Boston, MA Developing a GPU Processing Framework for Accelerating Remote Sensing Algorithms
19 October 2010 Research and Industrial Collaboration Conference Research to Reality Northeastern University, Boston, MA Developing a GPU Processing Framework for Accelerating Remote Sensing Algorithms
Virtual Reality: Basic Concept
 Virtual Reality: Basic Concept INTERACTION VR IMMERSION VISUALISATION NAVIGATION Virtual Reality is about creating substitutes of real-world objects, events or environments that are acceptable to humans
Virtual Reality: Basic Concept INTERACTION VR IMMERSION VISUALISATION NAVIGATION Virtual Reality is about creating substitutes of real-world objects, events or environments that are acceptable to humans
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
NETIS Networking International School. 2 nd edition. An event organized by MIV Imaging Venture and supported by ACEOLE - a Marie Curie program
 NETIS 2011 Networking International School 2 nd edition An event organized by MIV Imaging Venture and supported by ACEOLE - a Marie Curie program PROGRAMME DAYONE 24 th February 2011 8:30 9:00 Registration
NETIS 2011 Networking International School 2 nd edition An event organized by MIV Imaging Venture and supported by ACEOLE - a Marie Curie program PROGRAMME DAYONE 24 th February 2011 8:30 9:00 Registration
Interaction in Virtual Worlds: Application to Music Performers
 Interaction in Virtual Worlds: Application to Music Performers J. Esmerado, F. Vexo, D. Thalmann Computer Graphics Lab Swiss Federal Institute of Technology EPFL-LIG 1015 Lausanne Abstract We present a
Interaction in Virtual Worlds: Application to Music Performers J. Esmerado, F. Vexo, D. Thalmann Computer Graphics Lab Swiss Federal Institute of Technology EPFL-LIG 1015 Lausanne Abstract We present a
Lecture 26: Eye Tracking
 Lecture 26: Eye Tracking Inf1-Introduction to Cognitive Science Diego Frassinelli March 21, 2013 Experiments at the University of Edinburgh Student and Graduate Employment (SAGE): www.employerdatabase.careers.ed.ac.uk
Lecture 26: Eye Tracking Inf1-Introduction to Cognitive Science Diego Frassinelli March 21, 2013 Experiments at the University of Edinburgh Student and Graduate Employment (SAGE): www.employerdatabase.careers.ed.ac.uk
New interface approaches for telemedicine
 New interface approaches for telemedicine Associate Professor Mark Billinghurst PhD, Holger Regenbrecht Dipl.-Inf. Dr-Ing., Michael Haller PhD, Joerg Hauber MSc Correspondence to: mark.billinghurst@hitlabnz.org
New interface approaches for telemedicine Associate Professor Mark Billinghurst PhD, Holger Regenbrecht Dipl.-Inf. Dr-Ing., Michael Haller PhD, Joerg Hauber MSc Correspondence to: mark.billinghurst@hitlabnz.org
Assess how research on the construction of cognitive functions in robotic systems is undertaken in Japan, China, and Korea
 Sponsor: Assess how research on the construction of cognitive functions in robotic systems is undertaken in Japan, China, and Korea Understand the relationship between robotics and the human-centered sciences
Sponsor: Assess how research on the construction of cognitive functions in robotic systems is undertaken in Japan, China, and Korea Understand the relationship between robotics and the human-centered sciences
Motion Capturing Empowered Interaction with a Virtual Agent in an Augmented Reality Environment
 Motion Capturing Empowered Interaction with a Virtual Agent in an Augmented Reality Environment Ionut Damian Human Centered Multimedia Augsburg University damian@hcm-lab.de Felix Kistler Human Centered
Motion Capturing Empowered Interaction with a Virtual Agent in an Augmented Reality Environment Ionut Damian Human Centered Multimedia Augsburg University damian@hcm-lab.de Felix Kistler Human Centered
The Institute for Collaborative Environment Studies (ICES) Michael Zyda,
 Michael Zyda,") The Institute for Collaborative Environment Studies (ICES) Michael Zyda, Zyda@acm.org Overview Rationale based on NRC study Vision for the Institute Research - Directions & Application Industry Interaction
The Institute for Collaborative Environment Studies (ICES) Michael Zyda, Zyda@acm.org Overview Rationale based on NRC study Vision for the Institute Research - Directions & Application Industry Interaction
Graphical Simulation and High-Level Control of Humanoid Robots
 In Proc. 2000 IEEE RSJ Int l Conf. on Intelligent Robots and Systems (IROS 2000) Graphical Simulation and High-Level Control of Humanoid Robots James J. Kuffner, Jr. Satoshi Kagami Masayuki Inaba Hirochika
In Proc. 2000 IEEE RSJ Int l Conf. on Intelligent Robots and Systems (IROS 2000) Graphical Simulation and High-Level Control of Humanoid Robots James J. Kuffner, Jr. Satoshi Kagami Masayuki Inaba Hirochika
Immersive Guided Tours for Virtual Tourism through 3D City Models
 Immersive Guided Tours for Virtual Tourism through 3D City Models Rüdiger Beimler, Gerd Bruder, Frank Steinicke Immersive Media Group (IMG) Department of Computer Science University of Würzburg E-Mail:
Immersive Guided Tours for Virtual Tourism through 3D City Models Rüdiger Beimler, Gerd Bruder, Frank Steinicke Immersive Media Group (IMG) Department of Computer Science University of Würzburg E-Mail:
MATLAB is a high-level programming language, extensively
 1 KUKA Sunrise Toolbox: Interfacing Collaborative Robots with MATLAB Mohammad Safeea and Pedro Neto Abstract Collaborative robots are increasingly present in our lives. The KUKA LBR iiwa equipped with
1 KUKA Sunrise Toolbox: Interfacing Collaborative Robots with MATLAB Mohammad Safeea and Pedro Neto Abstract Collaborative robots are increasingly present in our lives. The KUKA LBR iiwa equipped with
preface Motivation Figure 1. Reality-virtuality continuum (Milgram & Kishino, 1994) Mixed.Reality Augmented. Virtuality Real...
 Mixed.Reality Augmented. Virtuality Real...") v preface Motivation Augmented reality (AR) research aims to develop technologies that allow the real-time fusion of computer-generated digital content with the real world. Unlike virtual reality (VR)
v preface Motivation Augmented reality (AR) research aims to develop technologies that allow the real-time fusion of computer-generated digital content with the real world. Unlike virtual reality (VR)
Study and Design of Virtual Laboratory in Robotics-Learning Fei MA* and Rui-qing JIA
 2017 International Conference on Applied Mechanics and Mechanical Automation (AMMA 2017) ISBN: 978-1-60595-471-4 Study and Design of Virtual Laboratory in Robotics-Learning Fei MA* and Rui-qing JIA School
2017 International Conference on Applied Mechanics and Mechanical Automation (AMMA 2017) ISBN: 978-1-60595-471-4 Study and Design of Virtual Laboratory in Robotics-Learning Fei MA* and Rui-qing JIA School
Framework Programme 7
 Framework Programme 7 1 Joining the EU programmes as a Belarusian 1. Introduction to the Framework Programme 7 2. Focus on evaluation issues + exercise 3. Strategies for Belarusian organisations + exercise
Framework Programme 7 1 Joining the EU programmes as a Belarusian 1. Introduction to the Framework Programme 7 2. Focus on evaluation issues + exercise 3. Strategies for Belarusian organisations + exercise
Mission Space. Value-based use of augmented reality in support of critical contextual environments
 Mission Space Value-based use of augmented reality in support of critical contextual environments Vicki A. Barbur Ph.D. Senior Vice President and Chief Technical Officer Concurrent Technologies Corporation
Mission Space Value-based use of augmented reality in support of critical contextual environments Vicki A. Barbur Ph.D. Senior Vice President and Chief Technical Officer Concurrent Technologies Corporation
Techniques for Designing GPGPU Games. Mark Joselli Esteban Clua
 Techniques for Designing GPGPU Games Mark Joselli Esteban Clua Presenta?on; Background; Mo?va?on; Objec?ves; Games and GPGPU; Techniques analyzed; Examples; Conclusions; Agenda Presenta?on: Mark Joselli
Techniques for Designing GPGPU Games Mark Joselli Esteban Clua Presenta?on; Background; Mo?va?on; Objec?ves; Games and GPGPU; Techniques analyzed; Examples; Conclusions; Agenda Presenta?on: Mark Joselli
2. Publishable summary
 2. Publishable summary CogLaboration (Successful real World Human-Robot Collaboration: from the cognition of human-human collaboration to fluent human-robot collaboration) is a specific targeted research
2. Publishable summary CogLaboration (Successful real World Human-Robot Collaboration: from the cognition of human-human collaboration to fluent human-robot collaboration) is a specific targeted research
Components for virtual environments Michael Haller, Roland Holm, Markus Priglinger, Jens Volkert, and Roland Wagner Johannes Kepler University of Linz
 Components for virtual environments Michael Haller, Roland Holm, Markus Priglinger, Jens Volkert, and Roland Wagner Johannes Kepler University of Linz Altenbergerstr 69 A-4040 Linz (AUSTRIA) [mhallerjrwagner]@f
Components for virtual environments Michael Haller, Roland Holm, Markus Priglinger, Jens Volkert, and Roland Wagner Johannes Kepler University of Linz Altenbergerstr 69 A-4040 Linz (AUSTRIA) [mhallerjrwagner]@f
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Immersive Visualization and Collaboration with LS-PrePost-VR and LS-PrePost-Remote
 8 th International LS-DYNA Users Conference Visualization Immersive Visualization and Collaboration with LS-PrePost-VR and LS-PrePost-Remote Todd J. Furlong Principal Engineer - Graphics and Visualization
8 th International LS-DYNA Users Conference Visualization Immersive Visualization and Collaboration with LS-PrePost-VR and LS-PrePost-Remote Todd J. Furlong Principal Engineer - Graphics and Visualization
Design of rehabilitation robots using virtual work platforms
 Design of rehabilitation robots using virtual work platforms J.Ibañez-Guzmán Ecole Supérieure Atlantique d Ingénieurs en Génie Electrique Gavy Oceanis, 44603 Saint Nazaire, FRANCE javier@esa-igelec.gavysn.univ-nantes.fr
Design of rehabilitation robots using virtual work platforms J.Ibañez-Guzmán Ecole Supérieure Atlantique d Ingénieurs en Génie Electrique Gavy Oceanis, 44603 Saint Nazaire, FRANCE javier@esa-igelec.gavysn.univ-nantes.fr
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Robotics 2 Collision detection and robot reaction
 Robotics 2 Collision detection and robot reaction Prof. Alessandro De Luca Handling of robot collisions! safety in physical Human-Robot Interaction (phri)! robot dependability (i.e., beyond reliability)!
Robotics 2 Collision detection and robot reaction Prof. Alessandro De Luca Handling of robot collisions! safety in physical Human-Robot Interaction (phri)! robot dependability (i.e., beyond reliability)!
D8.1 PROJECT PRESENTATION
 D8.1 PROJECT PRESENTATION Approval Status AUTHOR(S) NAME AND SURNAME ROLE IN THE PROJECT PARTNER Daniela De Lucia, Gaetano Cascini PoliMI APPROVED BY Gaetano Cascini Project Coordinator PoliMI History
D8.1 PROJECT PRESENTATION Approval Status AUTHOR(S) NAME AND SURNAME ROLE IN THE PROJECT PARTNER Daniela De Lucia, Gaetano Cascini PoliMI APPROVED BY Gaetano Cascini Project Coordinator PoliMI History
Virtual Life Network: a Body-Centered Networked Virtual Environment*
 Virtual Life Network: a Body-Centered Networked Virtual Environment* Igor-Sunday Pandzic 1, Tolga K. Capin 2, Nadia Magnenat Thalmann 1, Daniel Thalmann 2 1 MIRALAB-CUI, University of Geneva CH1211 Geneva
Virtual Life Network: a Body-Centered Networked Virtual Environment* Igor-Sunday Pandzic 1, Tolga K. Capin 2, Nadia Magnenat Thalmann 1, Daniel Thalmann 2 1 MIRALAB-CUI, University of Geneva CH1211 Geneva
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
THE FUTURE OF AUTOMOTIVE - AUGMENTED REALITY VERSUS AUTONOMOUS VEHICLES
 The 14 International Conference RELIABILITY and STATISTICS in TRANSPORTATION and COMMUNICATION 2014 Proceedings of the 14th International Conference Reliability and Statistics in Transportation and Communication
The 14 International Conference RELIABILITY and STATISTICS in TRANSPORTATION and COMMUNICATION 2014 Proceedings of the 14th International Conference Reliability and Statistics in Transportation and Communication
Dr Antony Robotham - Executive Director
 Dr Antony Robotham - Executive Director OPTIS China User Meeting 2011 18 October 2011, Shanghai, PR China Case Study with Bentley Motors Executive Director: Virtual Engineering Centre The University of
Dr Antony Robotham - Executive Director OPTIS China User Meeting 2011 18 October 2011, Shanghai, PR China Case Study with Bentley Motors Executive Director: Virtual Engineering Centre The University of
Visualization Laboratory
 Text-Arial 48 Text-Arial 36 Text-Arial 24 Text-Arial 14 Text-Arial 48 Text-Arial 36 Text-Arial 24 Text-Arial 14 Text-Arial 48 Text-Arial 36 Text-Arial 24 Text-Arial 14 Text-Arial 48 Text-Arial 36 Text-Arial
Text-Arial 48 Text-Arial 36 Text-Arial 24 Text-Arial 14 Text-Arial 48 Text-Arial 36 Text-Arial 24 Text-Arial 14 Text-Arial 48 Text-Arial 36 Text-Arial 24 Text-Arial 14 Text-Arial 48 Text-Arial 36 Text-Arial
DAWOOD PUBLIC SCHOOL COURSE OUTLINE
 DAWOOD PUBLIC SCHOOL COURSE OUTLINE 2018-19 ART & DESIGN Class VIII Month Art Development Focus Design August Focus on Line & Contour Rotational Symmetry September Interpretative Drawing Illustration Cut
DAWOOD PUBLIC SCHOOL COURSE OUTLINE 2018-19 ART & DESIGN Class VIII Month Art Development Focus Design August Focus on Line & Contour Rotational Symmetry September Interpretative Drawing Illustration Cut
Immersive Real Acting Space with Gesture Tracking Sensors
 , pp.1-6 http://dx.doi.org/10.14257/astl.2013.39.01 Immersive Real Acting Space with Gesture Tracking Sensors Yoon-Seok Choi 1, Soonchul Jung 2, Jin-Sung Choi 3, Bon-Ki Koo 4 and Won-Hyung Lee 1* 1,2,3,4
, pp.1-6 http://dx.doi.org/10.14257/astl.2013.39.01 Immersive Real Acting Space with Gesture Tracking Sensors Yoon-Seok Choi 1, Soonchul Jung 2, Jin-Sung Choi 3, Bon-Ki Koo 4 and Won-Hyung Lee 1* 1,2,3,4
Design Science Research Methods. Prof. Dr. Roel Wieringa University of Twente, The Netherlands
 Design Science Research Methods Prof. Dr. Roel Wieringa University of Twente, The Netherlands www.cs.utwente.nl/~roelw UFPE 26 sept 2016 R.J. Wieringa 1 Research methodology accross the disciplines Do
Design Science Research Methods Prof. Dr. Roel Wieringa University of Twente, The Netherlands www.cs.utwente.nl/~roelw UFPE 26 sept 2016 R.J. Wieringa 1 Research methodology accross the disciplines Do
Hybrid Neuro-Fuzzy System for Mobile Robot Reactive Navigation
 Hybrid Neuro-Fuzzy ystem for Mobile Robot Reactive Navigation Ayman A. AbuBaker Assistance Prof. at Faculty of Information Technology, Applied cience University, Amman- Jordan, a_abubaker@asu.edu.jo. ABTRACT
Hybrid Neuro-Fuzzy ystem for Mobile Robot Reactive Navigation Ayman A. AbuBaker Assistance Prof. at Faculty of Information Technology, Applied cience University, Amman- Jordan, a_abubaker@asu.edu.jo. ABTRACT
PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES
 Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Virtual Shadow: Making Cross Traffic Dynamics Visible through Augmented Reality Head Up Display
 Proceedings of the Human Factors and Ergonomics Society 2016 Annual Meeting 2093 Virtual Shadow: Making Cross Traffic Dynamics Visible through Augmented Reality Head Up Display Hyungil Kim, Jessica D.
Proceedings of the Human Factors and Ergonomics Society 2016 Annual Meeting 2093 Virtual Shadow: Making Cross Traffic Dynamics Visible through Augmented Reality Head Up Display Hyungil Kim, Jessica D.
Direct 3D Interaction with Smart Objects
 Direct 3D Interaction with Smart Objects Marcelo Kallmann EPFL - LIG - Computer Graphics Lab Swiss Federal Institute of Technology, CH-1015, Lausanne, EPFL LIG +41 21-693-5248 kallmann@lig.di.epfl.ch Daniel
Direct 3D Interaction with Smart Objects Marcelo Kallmann EPFL - LIG - Computer Graphics Lab Swiss Federal Institute of Technology, CH-1015, Lausanne, EPFL LIG +41 21-693-5248 kallmann@lig.di.epfl.ch Daniel
Cognitive Systems and Robotics: opportunities in FP7
 Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS
 AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
Bogobots-TecMTY humanoid kid-size team 2009
 Bogobots-TecMTY humanoid kid-size team 2009 Erick Cruz-Hernández 1, Guillermo Villarreal-Pulido 1, Salvador Sumohano-Verdeja 1, Alejandro Aceves-López 1 1 Tecnológico de Monterrey, Campus Estado de México,
Bogobots-TecMTY humanoid kid-size team 2009 Erick Cruz-Hernández 1, Guillermo Villarreal-Pulido 1, Salvador Sumohano-Verdeja 1, Alejandro Aceves-López 1 1 Tecnológico de Monterrey, Campus Estado de México,