Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications
|
|
|
- Harold Flynn
- 5 years ago
- Views:
Transcription
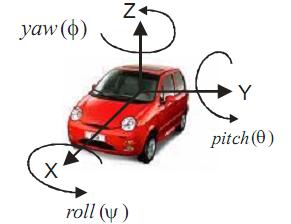
1 Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications AASHTO GIS-T Symposium April 2012
2 Table Of Contents Connected Vehicle Program Goals Mapping Technology Assessment Approach and Status Field Test Overview Next Steps






3 Connected Vehicle Program Goals and Objectives FHWA s Connected Vehicle Program was established to facilitate the implementation of applications related to vehicles and/or infrastructure for helping to enhance safety, mobility, and the environment. Commun-ications These applications will utilize mapping, positioning, and communication technology for their operations to provide information on the location of vehicles in relation to the roadway, other vehicles, and pedestrians. Positioning Connected Vehicle Highway Network Applications Mapping Connected Vehicle is a large, multi-faceted program managed by the ITS Joint Program Office of the Research and Innovative Technology Administration (RITA) System Integration
4 3 Communications Technologies Wide Area Duplex Link Wide Area Broadcast Link Traffic Signal Controller DSRC
5 4 Positioning Technologies
6 5 Relative Position of Targets Referenced to Absolute Position Provided by GPS Relative Position Sensor Relative Position Azimuth Error Range Error Note: Also may have Elevation Error ; however generally not used. Absolute Position: Area in which the Vehicle Position Lies, within the Specified Confidence Level (Typically 95%)



7 6 Mapping Technologies As one of the main supporting technologies of the Connected Vehicle Program, Mapping Technologies provide critical support across safety, mobility, and environment applications through the provision and update of roadway data The mapping of roadways involves developing an accurate geometric representation of the roadway and attribution of those geometries with application relevant data Roadways are usually represented in GIS databases as linear features. Lane configuration and connectivity may also be represented in the form of additional geometries in the database or through attribution The development of maps supporting Connected Vehicle applications requires the initial creation of the maps as well as ongoing, timely update of these maps
8 7 Mapping Technology Assessment Project The Mapping Technology Assessment for Connected Vehicle Highway Network Applications project aims to analyze and determine the best current and anticipated geospatial technologies and mapping approaches to support intelligent transportation systems (ITS) This assessment is fundamental to providing solutions that allow connected vehicle network applications to bring about transformational improvements in the safety, mobility, and environmental performance of our nation s transportation systems Mapping Technologies are a key enabler for the Program and its applications Vehicles need to know where they are in relation to other vehicles (relative position) Vehicles need to know where they are in relation to the roadway (absolute position) The focus of the project is across 3 major areas: Assess what mapping technologies meet the requirements of Connected Vehicle applications Test relevant technologies in lab and in the Connected Vehicle Highway Testbed (CVHT) Develop a data management framework for compilation, storage, and update of collected data The goal of the connected vehicle vision is high, but the potential benefits are significant as implementation of connected vehicle network applications can have far reaching impacts on transportation

9 8 Mapping Technology Assessment Approach Task 1 Project Planning Task 2 Identify Mapping Parameters Task 3 Analyze Mapping Technologies Task 4 Develop Capability Matrix Ongoing project planning and management through the course of the project. Definition of mapping technology requirements through existing documentation review, stakeholder interviews, and participation of the Industry Advisory Board (IAB). Analyze characteristics of five candidate mapping technologies As-Built Designs, Aerial Based Imagery, Vehicle Mounted Technologies, Data Fusion, and Probe/Crowd Sourced Data. Analyze requirements generated in Task 2 against the technologies characterized in Task 3 to develop performance capabilities of each mapping technology. Task 5 Technology Field Test Demonstration and testing of specific mapping technologies, including vehicle mounted technology solutions. Task 6 Data Management Develop a data management framework guiding data collection, storage, and maintenance for use during Field Test and other related Connected Vehicle activities. Task 7 Final Report Integration of all task findings into a consolidated Final Report.
10 9 Current Project Status Final Interim Reports have been completed for several tasks. Task 2: Stakeholder Feedback Summary Report Task 3: Mapping Technology Report Task 6: Data Management Report Task 4: Mapping Technology Evaluation Initial Field Testing was completed in February 2012 Purchase and configuration of equipment to support vehicle mounted technology test Initial configuration of the equipment on test vehicle Installation of road signs and road markings at test facility Limited data collection Upcoming activities include: Final preparations for full Field Test in May Development of Final Findings Report





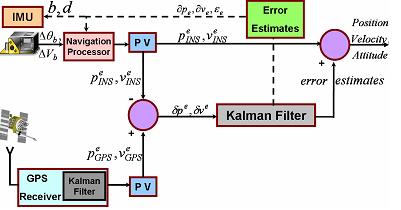
11 10 Overview of Field Test Data Flow Process Mapping Data Accumulation Mapping DataBase Development Application Demonstration Development Vision GPS/INS Lidar Vision GPS/INS Raw Data Smoothing/ Feature Extraction Offline Processing Database Management Tool Application Software: Navigation + Feature Detection Feature Data Database Database Export Database

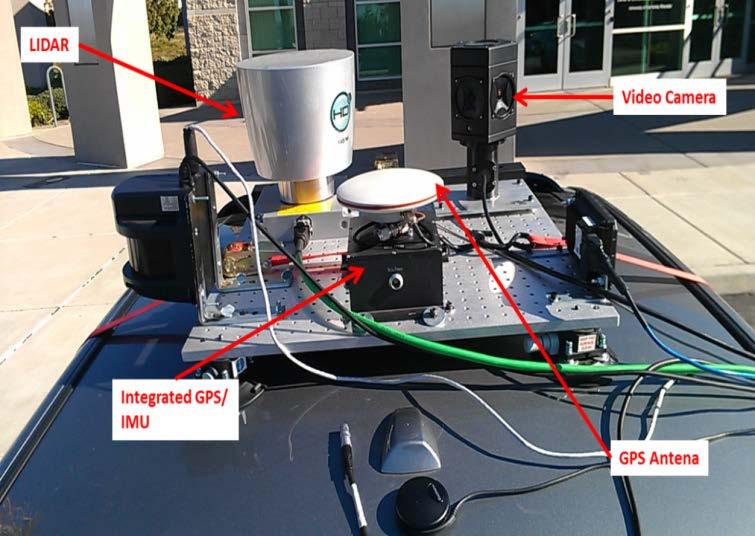

12 11 Equipment Configuration for Field Test Vehicle Mounting of Equipment


13 12 Next Steps In preparation for full Field Test in May, analyze results from initial Field Test to refine approach and solution Perform full Field Test at CVHT Parse collected data into layers for use by the applications Use collected data in selected applications to ensure the right data is being collected at the correct resolution to support requirements Use results from current project to support ongoing activities and research driving towards nationwide deployment Vehicle Mounted Technology Data Creation Example
14 13 Questions?
RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8)
 OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8)") Rec. ITU-R M.1310 1 RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8) Rec. ITU-R M.1310 (1997) Summary This Recommendation
Rec. ITU-R M.1310 1 RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8) Rec. ITU-R M.1310 (1997) Summary This Recommendation
NGA s Support for Positioning and Navigation
 NGA s Support for Positioning and Navigation PNT Symposium 6 November 2007 Barbara Wiley NATIONAL GEOSPATIAL-INTELLIGENCE AGENCY What is NGA and What Do We Do? National Geospatial-Intelligence Agency (NGA)
NGA s Support for Positioning and Navigation PNT Symposium 6 November 2007 Barbara Wiley NATIONAL GEOSPATIAL-INTELLIGENCE AGENCY What is NGA and What Do We Do? National Geospatial-Intelligence Agency (NGA)
interactive IP: Perception platform and modules
 interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
Driver Assistance and Awareness Applications
 Using s as Automotive Sensors Driver Assistance and Awareness Applications Faroog Ibrahim Visteon Corporation GNSS is all about positioning, sure. But for most automotive applications we need a map to
Using s as Automotive Sensors Driver Assistance and Awareness Applications Faroog Ibrahim Visteon Corporation GNSS is all about positioning, sure. But for most automotive applications we need a map to
DALE KELLER, P.E. ASSHTO COD JUNE 14, 2018 NEVADA DOT
 Interactive Visualization DALE KELLER, P.E. ASSHTO COD JUNE 14, 2018 NEVADA DOT 1 Interactive Visualization AII Overview The AASHTO Innovation Initiative (AII) advances innovation from the grassroots up:
Interactive Visualization DALE KELLER, P.E. ASSHTO COD JUNE 14, 2018 NEVADA DOT 1 Interactive Visualization AII Overview The AASHTO Innovation Initiative (AII) advances innovation from the grassroots up:
Robust Positioning for Urban Traffic
 Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
CONNECTED VEHICLE-TO-INFRASTRUCTURE INITATIVES
 CONNECTED VEHICLE-TO-INFRASTRUCTURE INITATIVES Arizona ITE March 3, 2016 Faisal Saleem ITS Branch Manager & MCDOT SMARTDrive Program Manager Maricopa County Department of Transportation ONE SYSTEM MULTIPLE
CONNECTED VEHICLE-TO-INFRASTRUCTURE INITATIVES Arizona ITE March 3, 2016 Faisal Saleem ITS Branch Manager & MCDOT SMARTDrive Program Manager Maricopa County Department of Transportation ONE SYSTEM MULTIPLE
Positioning Challenges in Cooperative Vehicular Safety Systems
 Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
MODULE 10: INTELLIGENT TRANSPORTATION SYSTEMS: SMART WORK ZONES LESSON 1: WORK ZONE SAFETY
 MODULE 10: INTELLIGENT TRANSPORTATION SYSTEMS: SMART WORK ZONES LESSON 1: WORK ZONE SAFETY Connected vehicle (CV) safety applications are designed to increase awareness of what is happening in the environment
MODULE 10: INTELLIGENT TRANSPORTATION SYSTEMS: SMART WORK ZONES LESSON 1: WORK ZONE SAFETY Connected vehicle (CV) safety applications are designed to increase awareness of what is happening in the environment
Transportation. Growth Management Policy Board April 4, 2019
 Transportation Growth Management Policy Board April 4, 2019 Overview Transportation in VISION 2040 Changes since the adoption of VISION 2040 Feedback to date Potential updates to the Transportation chapter
Transportation Growth Management Policy Board April 4, 2019 Overview Transportation in VISION 2040 Changes since the adoption of VISION 2040 Feedback to date Potential updates to the Transportation chapter
The EDA SUM Project. Surveillance in an Urban environment using Mobile sensors. 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012
 Surveillance in an Urban environment using Mobile sensors 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012 TABLE OF CONTENTS European Defence Agency Supported Project 1. SUM Project Description. 2. Subsystems
Surveillance in an Urban environment using Mobile sensors 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012 TABLE OF CONTENTS European Defence Agency Supported Project 1. SUM Project Description. 2. Subsystems
Roadside Range Sensors for Intersection Decision Support
 Roadside Range Sensors for Intersection Decision Support Arvind Menon, Alec Gorjestani, Craig Shankwitz and Max Donath, Member, IEEE Abstract The Intelligent Transportation Institute at the University
Roadside Range Sensors for Intersection Decision Support Arvind Menon, Alec Gorjestani, Craig Shankwitz and Max Donath, Member, IEEE Abstract The Intelligent Transportation Institute at the University
Fire Fighter Location Tracking & Status Monitoring Performance Requirements
 Fire Fighter Location Tracking & Status Monitoring Performance Requirements John A. Orr and David Cyganski orr@wpi.edu, cyganski@wpi.edu Electrical and Computer Engineering Department Worcester Polytechnic
Fire Fighter Location Tracking & Status Monitoring Performance Requirements John A. Orr and David Cyganski orr@wpi.edu, cyganski@wpi.edu Electrical and Computer Engineering Department Worcester Polytechnic
DENSO
 DENSO www.densocorp-na.com Collaborative Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide solutions
DENSO www.densocorp-na.com Collaborative Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide solutions
Improving the Safety and Efficiency of Roadway Maintenance Phase II: Developing a Vision Guidance System for the Robotic Roadway Message Painter
 Improving the Safety and Efficiency of Roadway Maintenance Phase II: Developing a Vision Guidance System for the Robotic Roadway Message Painter Final Report Prepared by: Ryan G. Rosandich Department of
Improving the Safety and Efficiency of Roadway Maintenance Phase II: Developing a Vision Guidance System for the Robotic Roadway Message Painter Final Report Prepared by: Ryan G. Rosandich Department of
Map Interface for Geo-Registering and Monitoring Distributed Events
 2010 13th International IEEE Annual Conference on Intelligent Transportation Systems Madeira Island, Portugal, September 19-22, 2010 TB1.5 Map Interface for Geo-Registering and Monitoring Distributed Events
2010 13th International IEEE Annual Conference on Intelligent Transportation Systems Madeira Island, Portugal, September 19-22, 2010 TB1.5 Map Interface for Geo-Registering and Monitoring Distributed Events
GPS-Based Navigation & Positioning Challenges in Communications- Enabled Driver Assistance Systems
 GPS-Based Navigation & Positioning Challenges in Communications- Enabled Driver Assistance Systems Chaminda Basnayake, Ph.D. Senior Research Engineer General Motors Research & Development and Planning
GPS-Based Navigation & Positioning Challenges in Communications- Enabled Driver Assistance Systems Chaminda Basnayake, Ph.D. Senior Research Engineer General Motors Research & Development and Planning
Model Deployment Overview. Debby Bezzina Senior Program Manager University of Michigan Transportation Research Institute
 Model Deployment Overview Debby Bezzina Senior Program Manager University of Michigan Transportation Research Institute Test Conductor Team 2 3 Connected Vehicle Technology 4 Safety Pilot Model Deployment
Model Deployment Overview Debby Bezzina Senior Program Manager University of Michigan Transportation Research Institute Test Conductor Team 2 3 Connected Vehicle Technology 4 Safety Pilot Model Deployment
This document is a preview generated by EVS
 TECHNICAL SPECIFICATION ISO/TS 19091 First edition 2017-03 Intelligent transport systems Cooperative ITS Using V2I and I2V communications for applications related to signalized intersections Systèmes intelligents
TECHNICAL SPECIFICATION ISO/TS 19091 First edition 2017-03 Intelligent transport systems Cooperative ITS Using V2I and I2V communications for applications related to signalized intersections Systèmes intelligents
Connected Vehicles and Maintenance Operations
 Connected Vehicles and Maintenance Operations Presentation to AASHTO SCOM Dean Deeter Athey Creek Consultants Topics Connected Vehicle Priorities Survey Results Connected Vehicle Applications Related to
Connected Vehicles and Maintenance Operations Presentation to AASHTO SCOM Dean Deeter Athey Creek Consultants Topics Connected Vehicle Priorities Survey Results Connected Vehicle Applications Related to
Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection
 Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection Clark Letter*, Lily Elefteriadou, Mahmoud Pourmehrab, Aschkan Omidvar Civil
Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection Clark Letter*, Lily Elefteriadou, Mahmoud Pourmehrab, Aschkan Omidvar Civil
Connected Car Networking
 Connected Car Networking Teng Yang, Francis Wolff and Christos Papachristou Electrical Engineering and Computer Science Case Western Reserve University Cleveland, Ohio Outline Motivation Connected Car
Connected Car Networking Teng Yang, Francis Wolff and Christos Papachristou Electrical Engineering and Computer Science Case Western Reserve University Cleveland, Ohio Outline Motivation Connected Car
Overview of Auburn University
 Overview of Auburn University David M. Bevly Associate Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 Auburn RESEARCH Peaks of Excellence Seven University
Overview of Auburn University David M. Bevly Associate Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 Auburn RESEARCH Peaks of Excellence Seven University
Jager UAVs to Locate GPS Interference
 JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
Customer Showcase > Defense and Intelligence
 Customer Showcase Skyline TerraExplorer is a critical visualization technology broadly deployed in defense and intelligence, public safety and security, 3D geoportals, and urban planning markets. It fuses
Customer Showcase Skyline TerraExplorer is a critical visualization technology broadly deployed in defense and intelligence, public safety and security, 3D geoportals, and urban planning markets. It fuses
Stream Design: From GEOPAK to HEC-Ras
 10 Stream Design: From GEOPAK to HEC-Ras OBJECTIVES Provide you with a general understanding of GEOPAK Cross Section Reports and their capability to generate geometric information for the HecRas program.
10 Stream Design: From GEOPAK to HEC-Ras OBJECTIVES Provide you with a general understanding of GEOPAK Cross Section Reports and their capability to generate geometric information for the HecRas program.
Connected and Autonomous Technology Evaluation Center (CAVTEC) Overview. TennSMART Spring Meeting April 9 th, 2019
 Overview. TennSMART Spring Meeting April 9 th, 2019") Connected and Autonomous Technology Evaluation Center (CAVTEC) Overview TennSMART Spring Meeting April 9 th, 2019 Location Location Location Tennessee s Portal to Aerospace & Defense Technologies Mach
Connected and Autonomous Technology Evaluation Center (CAVTEC) Overview TennSMART Spring Meeting April 9 th, 2019 Location Location Location Tennessee s Portal to Aerospace & Defense Technologies Mach
Improving Airport Planning & Development and Operations & Maintenance via Skyline 3D Software
 Improving Airport Planning & Development and Operations & Maintenance via Skyline 3D Software By David Tamir, February 2014 Skyline Software Systems has pioneered web-enabled 3D information mapping and
Improving Airport Planning & Development and Operations & Maintenance via Skyline 3D Software By David Tamir, February 2014 Skyline Software Systems has pioneered web-enabled 3D information mapping and
Combining Technologies: LiDaR, High Resolution Digital Images, Infrared Thermography and Geographic Information Systems
 : LiDaR, High Resolution Digital Images, Infrared Thermography and Geographic Information Systems Presented by: Eldris Ferrer, Ms E, GIS Analyst and Remote Sensing Specialist, CSA Group Alexis Ocasio,
: LiDaR, High Resolution Digital Images, Infrared Thermography and Geographic Information Systems Presented by: Eldris Ferrer, Ms E, GIS Analyst and Remote Sensing Specialist, CSA Group Alexis Ocasio,
Services Overview. Northeast Blueprint
 Services Overview 2D CAD Conversions Paper to CAD 2D CAD Conversions Construction Engineering / CAD Services Construction Markups Consultant Drawings Coordinated Drawings As -Builts Steel Structural Detailing
Services Overview 2D CAD Conversions Paper to CAD 2D CAD Conversions Construction Engineering / CAD Services Construction Markups Consultant Drawings Coordinated Drawings As -Builts Steel Structural Detailing
Guidelines for the Preparation of Traffic Signal & Intelligent Transportation System Plans on Design-Build Projects August 2007
 Guidelines for the Preparation of Traffic Signal & Intelligent Transportation System Plans on Design-Build Projects August 2007 INTRODUCTION Use the following Guidelines in conjunction with the Traffic
Guidelines for the Preparation of Traffic Signal & Intelligent Transportation System Plans on Design-Build Projects August 2007 INTRODUCTION Use the following Guidelines in conjunction with the Traffic
Arterial Connected Vehicle Test Bed Deployment and Lessons Learned
 ARIZONA CONNECTED VEHICLE PROGRAM Arterial Connected Vehicle Test Bed Deployment and Lessons Learned Faisal Saleem ITS Branch Manager & SMARTDrive Program Manager Maricopa County Department of Transportation
ARIZONA CONNECTED VEHICLE PROGRAM Arterial Connected Vehicle Test Bed Deployment and Lessons Learned Faisal Saleem ITS Branch Manager & SMARTDrive Program Manager Maricopa County Department of Transportation
Southern California Edison EPIC Overview
 EPIC Overview i-pcgrid Conference Aaron Renfro EPIC Program Administrator March 30, 2018 Summary of the EPIC Program Funding & Admin. Investment Areas Electricity System Value Chain $162M/annually in ratepayer
EPIC Overview i-pcgrid Conference Aaron Renfro EPIC Program Administrator March 30, 2018 Summary of the EPIC Program Funding & Admin. Investment Areas Electricity System Value Chain $162M/annually in ratepayer
Getting Through the Green: Smarter Traffic Management with Adaptive Signal Control
 Getting Through the Green: Smarter Traffic Management with Adaptive Signal Control Presented by: C. William (Bill) Kingsland, Assistant Commissioner, Transportation Systems Management Outline 1. What is
Getting Through the Green: Smarter Traffic Management with Adaptive Signal Control Presented by: C. William (Bill) Kingsland, Assistant Commissioner, Transportation Systems Management Outline 1. What is
Sensor Fusion for Navigation in Degraded Environements
 Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
Intelligent Transport Systems and GNSS. ITSNT 2017 ENAC, Toulouse, France 11/ Nobuaki Kubo (TUMSAT)
") Intelligent Transport Systems and GNSS ITSNT 2017 ENAC, Toulouse, France 11/14-17 2017 Nobuaki Kubo (TUMSAT) Contents ITS applications in Japan How can GNSS contribute to ITS? Current performance of GNSS
Intelligent Transport Systems and GNSS ITSNT 2017 ENAC, Toulouse, France 11/14-17 2017 Nobuaki Kubo (TUMSAT) Contents ITS applications in Japan How can GNSS contribute to ITS? Current performance of GNSS
GNSS and M2M for Automated Driving in Japan Masao FUKUSHIMA SIP Sub-Program Director ITS Technical Consultant, NISSAN MOTOR CO.,LTD May. 15.
 ICT SPRING EUROPE 2018 GNSS and M2M for Automated Driving in Japan Masao FUKUSHIMA SIP Sub-Program Director ITS Technical Consultant, NISSAN MOTOR CO.,LTD May. 15. 2018 SIP : Cross-Ministerial Strategic
ICT SPRING EUROPE 2018 GNSS and M2M for Automated Driving in Japan Masao FUKUSHIMA SIP Sub-Program Director ITS Technical Consultant, NISSAN MOTOR CO.,LTD May. 15. 2018 SIP : Cross-Ministerial Strategic
Integrating 3D Optical Imagery with Thermal Remote Sensing for Evaluating Bridge Deck Conditions
 Integrating 3D Optical Imagery with Thermal Remote Sensing for Evaluating Bridge Deck Conditions Richard Dobson www.mtri.org Project History 3D Optical Bridge-evaluation System (3DOBS) Proof-of-Concept
Integrating 3D Optical Imagery with Thermal Remote Sensing for Evaluating Bridge Deck Conditions Richard Dobson www.mtri.org Project History 3D Optical Bridge-evaluation System (3DOBS) Proof-of-Concept
The GATEway Project London s Autonomous Push
 The GATEway Project London s Autonomous Push 06/2016 Why TRL? Unrivalled industry position with a focus on mobility 80 years independent transport research Public and private sector with global reach 350+
The GATEway Project London s Autonomous Push 06/2016 Why TRL? Unrivalled industry position with a focus on mobility 80 years independent transport research Public and private sector with global reach 350+
Final Report Non Hit Car And Truck
 Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
Preparatory paper: food for thought
 CNS SYMPOSIUM 2-3 October 2018 EUROCONTROL s Brussels HQ Preparatory paper: food for thought 1 Introduction EUROCONTROL will host a two-day interactive CNS Symposium on October 2 nd and 3 rd, 2018. This
CNS SYMPOSIUM 2-3 October 2018 EUROCONTROL s Brussels HQ Preparatory paper: food for thought 1 Introduction EUROCONTROL will host a two-day interactive CNS Symposium on October 2 nd and 3 rd, 2018. This
Service Cooperation and Co-creative Intelligence Cycle Based on Mixed-Reality Technology
 Service Cooperation and Co-creative Intelligence Cycle Based on Mixed-Reality Technology Takeshi Kurata, Masakatsu Kourogi, Tomoya Ishikawa, Jungwoo Hyun and Anjin Park Center for Service Research, AIST
Service Cooperation and Co-creative Intelligence Cycle Based on Mixed-Reality Technology Takeshi Kurata, Masakatsu Kourogi, Tomoya Ishikawa, Jungwoo Hyun and Anjin Park Center for Service Research, AIST
2008 ConnDOT Photolog Program Overview
 2008 ConnDOT Photolog Program Overview Brad Overturf, Transportation Photolog Supervisor Northeast Pavement Preservation Partnership 2008 Good morning. Thank you to the Northeast Pavement Preservation
2008 ConnDOT Photolog Program Overview Brad Overturf, Transportation Photolog Supervisor Northeast Pavement Preservation Partnership 2008 Good morning. Thank you to the Northeast Pavement Preservation
Using Imagery for Intelligence Analysis. Jim Michel Renee Bernstein
 Using Imagery for Intelligence Analysis Jim Michel Renee Bernstein Deriving Value from GIS and Imagery Capabilities Evolved Along Separate but Parallel Paths GIS Imagery brings value Imagery Contextual
Using Imagery for Intelligence Analysis Jim Michel Renee Bernstein Deriving Value from GIS and Imagery Capabilities Evolved Along Separate but Parallel Paths GIS Imagery brings value Imagery Contextual
Next Generation Vehicle Positioning Techniques for GPS-Degraded Environments to Support Vehicle Safety and Automation Systems
 Next Generation Vehicle Positioning Techniques for GPS-Degraded Environments to Support Vehicle Safety and Automation Systems EXPLORATORY ADVANCED RESEARCH PROGRAM Auburn University Sarnoff Corporation
Next Generation Vehicle Positioning Techniques for GPS-Degraded Environments to Support Vehicle Safety and Automation Systems EXPLORATORY ADVANCED RESEARCH PROGRAM Auburn University Sarnoff Corporation
Active Road Management Assisted by Satellite. ARMAS Phase II
 Active Road Management Assisted by Satellite ARMAS Phase II European Roundtable on Intelligent Roads Brussels, 26 January 2006 1 2 Table of Contents Overview of ARMAS System Architecture Field Trials Conclusions
Active Road Management Assisted by Satellite ARMAS Phase II European Roundtable on Intelligent Roads Brussels, 26 January 2006 1 2 Table of Contents Overview of ARMAS System Architecture Field Trials Conclusions
ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE
 ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE W. C. Lopes, R. R. D. Pereira, M. L. Tronco, A. J. V. Porto NepAS [Center for Teaching
ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE W. C. Lopes, R. R. D. Pereira, M. L. Tronco, A. J. V. Porto NepAS [Center for Teaching
Planarization & Routing Guide
 Metro Regional Centerlines Collaborative Planarization & Routing Guide Document: Version. Published: July 8, 25 Prepared and edited by: Matt Koukol, MRCC Project Technical Lead Ramsey County GIS Manager
Metro Regional Centerlines Collaborative Planarization & Routing Guide Document: Version. Published: July 8, 25 Prepared and edited by: Matt Koukol, MRCC Project Technical Lead Ramsey County GIS Manager
Technical Notes LAND MAPPING APPLICATIONS. Leading the way with increased reliability.
 LAND MAPPING APPLICATIONS Technical Notes Leading the way with increased reliability. Industry-leading post-processing software designed to maximize the accuracy potential of your POS LV (Position and
LAND MAPPING APPLICATIONS Technical Notes Leading the way with increased reliability. Industry-leading post-processing software designed to maximize the accuracy potential of your POS LV (Position and
Intelligent Technology for More Advanced Autonomous Driving
 FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
Perception platform and fusion modules results. Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event
 Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Clear Roads Overview and Highlights
 Clear Roads Overview and Highlights AASHTO SCOM / TRB Maintenance Conference July 20, 2015 Des Moines, Iowa Justin Droste, P.E. Roadway Operations Engineer, Michigan DOT Clear Roads Technical Advisory
Clear Roads Overview and Highlights AASHTO SCOM / TRB Maintenance Conference July 20, 2015 Des Moines, Iowa Justin Droste, P.E. Roadway Operations Engineer, Michigan DOT Clear Roads Technical Advisory
Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed
 AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
Integration of Traditional and Non- Traditional Remote Sensing for Bridge Condition Assessment
 Integration of Traditional and Non- Traditional Remote Sensing for Bridge Condition Assessment Tess Ahlborn, Ph.D., P.E., FPCI Devin Harris, Ph.D., Colin Brooks and Larry Sutter, Ph.D. Michigan Technological
Integration of Traditional and Non- Traditional Remote Sensing for Bridge Condition Assessment Tess Ahlborn, Ph.D., P.E., FPCI Devin Harris, Ph.D., Colin Brooks and Larry Sutter, Ph.D. Michigan Technological
Traffic Management for Smart Cities TNK115 SMART CITIES
 Traffic Management for Smart Cities TNK115 SMART CITIES DAVID GUNDLEGÅRD DIVISION OF COMMUNICATION AND TRANSPORT SYSTEMS Outline Introduction Traffic sensors Traffic models Frameworks Information VS Control
Traffic Management for Smart Cities TNK115 SMART CITIES DAVID GUNDLEGÅRD DIVISION OF COMMUNICATION AND TRANSPORT SYSTEMS Outline Introduction Traffic sensors Traffic models Frameworks Information VS Control
Proposed Watertown Plank Road Interchange Evaluation Using a Full Scale Driving Simulator
 Proposed Watertown Plank Road Interchange Evaluation Using a Full Scale Driving Simulator Kelvin R. Santiago-Chaparro, Dan Reichl, Andrea R. Bill, and David A. Noyce A full-scale driving simulator was
Proposed Watertown Plank Road Interchange Evaluation Using a Full Scale Driving Simulator Kelvin R. Santiago-Chaparro, Dan Reichl, Andrea R. Bill, and David A. Noyce A full-scale driving simulator was
ITS Radiocommunications in Japan Progress report and future directions
 ITS Radiocommunications in Japan Progress report and future directions 6 March 2018 Berlin, Germany Tomoaki Ishii Assistant Director, New-Generation Mobile Communications Office, Radio Dept., Telecommunications
ITS Radiocommunications in Japan Progress report and future directions 6 March 2018 Berlin, Germany Tomoaki Ishii Assistant Director, New-Generation Mobile Communications Office, Radio Dept., Telecommunications
An Approach to Integrating Modeling & Simulation Interoperability
 An Approach to Integrating Modeling & Simulation Interoperability Brian Spaulding Jorge Morales MÄK Technologies 68 Moulton Street Cambridge, MA 02138 bspaulding@mak.com, jmorales@mak.com ABSTRACT: Distributed
An Approach to Integrating Modeling & Simulation Interoperability Brian Spaulding Jorge Morales MÄK Technologies 68 Moulton Street Cambridge, MA 02138 bspaulding@mak.com, jmorales@mak.com ABSTRACT: Distributed
Technical Memorandum# TM2
 Technical Memorandum#0-6902-TM2 To: From: RTI Project Manager: Sonya Badgley CTR Research Team: Andrea Gold, Kristie Chin, C. Michael Walton Subject: TxDOT Project 0-6902 Technical Memorandum for Task
Technical Memorandum#0-6902-TM2 To: From: RTI Project Manager: Sonya Badgley CTR Research Team: Andrea Gold, Kristie Chin, C. Michael Walton Subject: TxDOT Project 0-6902 Technical Memorandum for Task
ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit)
") Exhibit R-2 0602308A Advanced Concepts and Simulation ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit) FY 2005 FY 2006 FY 2007 FY 2008 FY 2009 FY 2010 FY 2011 Total Program Element (PE) Cost 22710 27416
Exhibit R-2 0602308A Advanced Concepts and Simulation ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit) FY 2005 FY 2006 FY 2007 FY 2008 FY 2009 FY 2010 FY 2011 Total Program Element (PE) Cost 22710 27416
White paper on CAR28T millimeter wave radar
 White paper on CAR28T millimeter wave radar Hunan Nanoradar Science and Technology Co., Ltd. Version history Date Version Version description 2017-07-13 1.0 the 1st version of white paper on CAR28T Contents
White paper on CAR28T millimeter wave radar Hunan Nanoradar Science and Technology Co., Ltd. Version history Date Version Version description 2017-07-13 1.0 the 1st version of white paper on CAR28T Contents
UCL CULTURE. Artist Brief 1. Permanent commission for public access areas Destination artwork
 UCL CULTURE Artist Brief 1 Permanent commission for public access areas Destination artwork Introduction UCL would like to invite an artist to develop a permanent public art work for the New Student Centre
UCL CULTURE Artist Brief 1 Permanent commission for public access areas Destination artwork Introduction UCL would like to invite an artist to develop a permanent public art work for the New Student Centre
The marginalisation of cross-cutting issues in CCUS Mission Innovation PRDs
 The marginalisation of cross-cutting issues in CCUS Mission Innovation PRDs David M Reiner, EPRG Session 2B: RD&D priorities for CO2 Storage and crosscutting aspects of CCUS Edinburgh 28 November, 2018
The marginalisation of cross-cutting issues in CCUS Mission Innovation PRDs David M Reiner, EPRG Session 2B: RD&D priorities for CO2 Storage and crosscutting aspects of CCUS Edinburgh 28 November, 2018
Lane-Level Vehicle Positioning using DSRC as an Aiding Signal
 CONNECTED VEHICLE TECHNOLOGY CHALLENGE Lane-Level Vehicle Positioning using DSRC as an Aiding Signal Proposing Organization: Transportation Systems Research Group, College of Engineering - Center for Environmental
CONNECTED VEHICLE TECHNOLOGY CHALLENGE Lane-Level Vehicle Positioning using DSRC as an Aiding Signal Proposing Organization: Transportation Systems Research Group, College of Engineering - Center for Environmental
Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications
 Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications Young-Woo Seo and Ragunathan (Raj) Rajkumar GM-CMU Autonomous Driving Collaborative Research Lab Carnegie Mellon University
Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications Young-Woo Seo and Ragunathan (Raj) Rajkumar GM-CMU Autonomous Driving Collaborative Research Lab Carnegie Mellon University
3D Technologies Implementation - SE Freeways Design Wisconsin Department of Transportation
 3D Technologies Implementation - SE Freeways Design Wisconsin Department of Transportation Bob Gutierrez, P.E. Chief Southeast Freeways Design, WisDOT $1.7 b reconstruction of Zoo IC-Corridor WisDOT SE
3D Technologies Implementation - SE Freeways Design Wisconsin Department of Transportation Bob Gutierrez, P.E. Chief Southeast Freeways Design, WisDOT $1.7 b reconstruction of Zoo IC-Corridor WisDOT SE
UN-GGIM Future Trends in Geospatial Information Management 1
 UNITED NATIONS SECRETARIAT ESA/STAT/AC.279/P5 Department of Economic and Social Affairs October 2013 Statistics Division English only United Nations Expert Group on the Integration of Statistical and Geospatial
UNITED NATIONS SECRETARIAT ESA/STAT/AC.279/P5 Department of Economic and Social Affairs October 2013 Statistics Division English only United Nations Expert Group on the Integration of Statistical and Geospatial
V2IDC TWG 2 (Research) Conference Call
 Conference Call") V2IDC TWG 2 (Research) Conference Call June 1, 2016 Attendees: 1. Bill Gouse, SAE 2. Greg Larson, Caltrans 3. Yang Cheng, Traffic Operations and Safety (TOPS) Lab at UW-Madison 4. Danjue Chen, Traffic
V2IDC TWG 2 (Research) Conference Call June 1, 2016 Attendees: 1. Bill Gouse, SAE 2. Greg Larson, Caltrans 3. Yang Cheng, Traffic Operations and Safety (TOPS) Lab at UW-Madison 4. Danjue Chen, Traffic
Digital transformation in the Catalan public administrations
 Digital transformation in the Catalan public administrations Joan Ramon Marsal, Coordinator of the National Agreement for the Digital Society egovernment Working Group. Government of Catalonia Josep Lluís
Digital transformation in the Catalan public administrations Joan Ramon Marsal, Coordinator of the National Agreement for the Digital Society egovernment Working Group. Government of Catalonia Josep Lluís
EXPERT GROUP MEETING ON CONTEMPORARY PRACTICES IN CENSUS MAPPING AND USE OF GEOGRAPHICAL INFORMATION SYSTEMS New York, 29 May - 1 June 2007
 EXPERT GROUP MEETING ON CONTEMPORARY PRACTICES IN CENSUS MAPPING AND USE OF GEOGRAPHICAL INFORMATION SYSTEMS New York, 29 May - 1 June 2007 STATEMENT OF DR. PAUL CHEUNG DIRECTOR OF THE UNITED NATIONS STATISTICS
EXPERT GROUP MEETING ON CONTEMPORARY PRACTICES IN CENSUS MAPPING AND USE OF GEOGRAPHICAL INFORMATION SYSTEMS New York, 29 May - 1 June 2007 STATEMENT OF DR. PAUL CHEUNG DIRECTOR OF THE UNITED NATIONS STATISTICS
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators. Roberto De Vecchi VI-grade Enrico Busto - AddFor
 ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
Wide-area Motion Imagery for Multi-INT Situational Awareness
 Wide-area Motion Imagery for Multi-INT Situational Awareness Bernard V. Brower Jason Baker Brian Wenink Harris Corporation TABLE OF CONTENTS ABSTRACT... 3 INTRODUCTION WAMI HISTORY... 4 WAMI Capabilities
Wide-area Motion Imagery for Multi-INT Situational Awareness Bernard V. Brower Jason Baker Brian Wenink Harris Corporation TABLE OF CONTENTS ABSTRACT... 3 INTRODUCTION WAMI HISTORY... 4 WAMI Capabilities
Region-wide Microsimulation-based DTA: Context, Approach, and Implementation for NFTPO
 Region-wide Microsimulation-based DTA: Context, Approach, and Implementation for NFTPO presented by Howard Slavin & Daniel Morgan Caliper Corporation March 27, 2014 Context: Motivation Technical Many transportation
Region-wide Microsimulation-based DTA: Context, Approach, and Implementation for NFTPO presented by Howard Slavin & Daniel Morgan Caliper Corporation March 27, 2014 Context: Motivation Technical Many transportation
Assessment of Smart Machines and Manufacturing Competence Centre (SMACC) Scientific Advisory Board Site Visit April 2018.
 Scientific Advisory Board Site Visit April 2018.") Assessment of Smart Machines and Manufacturing Competence Centre (SMACC) Scientific Advisory Board Site Visit 25-27 April 2018 Assessment Report 1. Scientific ambition, quality and impact Rating: 3.5 The
Assessment of Smart Machines and Manufacturing Competence Centre (SMACC) Scientific Advisory Board Site Visit 25-27 April 2018 Assessment Report 1. Scientific ambition, quality and impact Rating: 3.5 The
DLR Project ADVISE-PRO Advanced Visual System for Situation Awareness Enhancement Prototype Introduction The Project ADVISE-PRO
 DLR Project ADVISE-PRO Advanced Visual System for Situation Awareness Enhancement Prototype Dr. Bernd Korn DLR, Institute of Flight Guidance Lilienthalplatz 7 38108 Braunschweig Bernd.Korn@dlr.de phone
DLR Project ADVISE-PRO Advanced Visual System for Situation Awareness Enhancement Prototype Dr. Bernd Korn DLR, Institute of Flight Guidance Lilienthalplatz 7 38108 Braunschweig Bernd.Korn@dlr.de phone
Intelligent Transport Systems standardization in ITU. 8-9 October 2018 Detroit Michigan USA
 Intelligent Transport Systems standardization in ITU 8-9 October 2018 Detroit Michigan USA : international organization with global presence 5 Elected Officials ~750 Staff from ~80 Countries Membership
Intelligent Transport Systems standardization in ITU 8-9 October 2018 Detroit Michigan USA : international organization with global presence 5 Elected Officials ~750 Staff from ~80 Countries Membership
Dependability of GNSS on the UK Railways
 Dependability of GNSS on the UK Railways M. Thomas 1, D. Lowe 2, M. Dumville 2, W. Roberts 2, P. Cross 3, G. Roberts 4, T. Nunn 5 1 Rail Safety and Standards Board, London, UK, 2 Nottingham Scientific
Dependability of GNSS on the UK Railways M. Thomas 1, D. Lowe 2, M. Dumville 2, W. Roberts 2, P. Cross 3, G. Roberts 4, T. Nunn 5 1 Rail Safety and Standards Board, London, UK, 2 Nottingham Scientific
Next Generation Vehicle Positioning Techniques for GPS- Degraded Environments to Support Vehicle Safety and Automation Systems
 Next Generation Vehicle Positioning Techniques for GPS- Degraded Environments to Support Vehicle Safety and Automation Systems EXPLORATORY ADVANCED RESEARCH PROGRAM Auburn University SRI (formerly Sarnoff)
Next Generation Vehicle Positioning Techniques for GPS- Degraded Environments to Support Vehicle Safety and Automation Systems EXPLORATORY ADVANCED RESEARCH PROGRAM Auburn University SRI (formerly Sarnoff)
Standards for Linear Referencing
 Standards for Linear Referencing Dr. Paul Scarponcini Bentley Transportation Data Management March 3, 2004 Rapid City, South Dakota 2004 Bentley Systems, Inc. Linear Referencing PROJECT project: name:
Standards for Linear Referencing Dr. Paul Scarponcini Bentley Transportation Data Management March 3, 2004 Rapid City, South Dakota 2004 Bentley Systems, Inc. Linear Referencing PROJECT project: name:
Positioning, location data and GNSS as solution for Autonomous driving
 Positioning, location data and GNSS as solution for Autonomous driving Jarkko Koskinen, Heidi Kuusniemi, Juha Hyyppä, Sarang Thombre and Martti Kirkko-Jaakkola FGI, NLS Definition of the Arctic 66 34 N
Positioning, location data and GNSS as solution for Autonomous driving Jarkko Koskinen, Heidi Kuusniemi, Juha Hyyppä, Sarang Thombre and Martti Kirkko-Jaakkola FGI, NLS Definition of the Arctic 66 34 N
Guidelines for the Preparation of ITS & Signal Plans by Private Engineering Firms
 Guidelines for the Preparation of ITS & Signal Plans by Private Engineering Firms INTRODUCTION Use the following Guidelines in conjunction with the ITS & Signals Scope of work provided in the Project Scoping
Guidelines for the Preparation of ITS & Signal Plans by Private Engineering Firms INTRODUCTION Use the following Guidelines in conjunction with the ITS & Signals Scope of work provided in the Project Scoping
Visualization of Vehicular Traffic in Augmented Reality for Improved Planning and Analysis of Road Construction Projects
 NSF GRANT # 0448762 NSF PROGRAM NAME: CMMI/CIS Visualization of Vehicular Traffic in Augmented Reality for Improved Planning and Analysis of Road Construction Projects Amir H. Behzadan City University
NSF GRANT # 0448762 NSF PROGRAM NAME: CMMI/CIS Visualization of Vehicular Traffic in Augmented Reality for Improved Planning and Analysis of Road Construction Projects Amir H. Behzadan City University
TERMS OF REFERENCE FOR CONSULTANTS Attached Technical Assistance on Sri Lanka: Expressway Operations Improvement Project
 Expressway Operations Improvement Project (TRTA SRI 50299) I. Background TERMS OF REFERENCE FOR CONSULTANTS Attached Technical Assistance on Sri Lanka: Expressway Operations Improvement Project 1. The
Expressway Operations Improvement Project (TRTA SRI 50299) I. Background TERMS OF REFERENCE FOR CONSULTANTS Attached Technical Assistance on Sri Lanka: Expressway Operations Improvement Project 1. The
Revision of the EU General Safety Regulation and Pedestrian Safety Regulation
 AC.nl Revision of the EU General Safety Regulation and Pedestrian Safety Regulation 11 September 2018 ETSC isafer Fitting safety as standard Directorate-General for Internal Market, Automotive and Mobility
AC.nl Revision of the EU General Safety Regulation and Pedestrian Safety Regulation 11 September 2018 ETSC isafer Fitting safety as standard Directorate-General for Internal Market, Automotive and Mobility
Consultancy on Technological Foresight
 Consultancy on Technological Foresight A Product of the Technical Cooperation Agreement Strategic Roadmap for Productive Development in Trinidad and Tobago Policy Links, IfM Education and Consultancy Services
Consultancy on Technological Foresight A Product of the Technical Cooperation Agreement Strategic Roadmap for Productive Development in Trinidad and Tobago Policy Links, IfM Education and Consultancy Services
New Techniques in Binder Property Measurement
 Pie in the Sky New Techniques in Binder Property Measurement Michael.Hauck@asprs.org Outline Let s Dream a Little Perspective - The Original Moon Shot Looking Back at WRI s Own Moon Shot Déjà Vu and Lasers
Pie in the Sky New Techniques in Binder Property Measurement Michael.Hauck@asprs.org Outline Let s Dream a Little Perspective - The Original Moon Shot Looking Back at WRI s Own Moon Shot Déjà Vu and Lasers
March 10, Greenbelt Road, Suite 400, Greenbelt, MD Tel: (301) Fax: (301)
 Fax: (301)") Detection of High Risk Intersections Using Synthetic Machine Vision John Alesse, john.alesse.ctr@dot.gov Brian O Donnell, brian.odonnell.ctr@dot.gov Stinger Ghaffarian Technologies, Inc. Cambridge, Massachusetts
Detection of High Risk Intersections Using Synthetic Machine Vision John Alesse, john.alesse.ctr@dot.gov Brian O Donnell, brian.odonnell.ctr@dot.gov Stinger Ghaffarian Technologies, Inc. Cambridge, Massachusetts
National Policing Improvement Agency. National Policing Improvement Agency Meeting the challenges of 21 st century crime and criminality
 National Policing Improvement Agency Meeting the challenges of 21 st century crime and criminality Michael Hallowes Detective Chief Superintendent Head of Strategic Operations National Policing Improvement
National Policing Improvement Agency Meeting the challenges of 21 st century crime and criminality Michael Hallowes Detective Chief Superintendent Head of Strategic Operations National Policing Improvement
Road Boundary Estimation in Construction Sites Michael Darms, Matthias Komar, Dirk Waldbauer, Stefan Lüke
 Road Boundary Estimation in Construction Sites Michael Darms, Matthias Komar, Dirk Waldbauer, Stefan Lüke Lanes in Construction Sites Roadway is often bounded by elevated objects (e.g. guidance walls)
Road Boundary Estimation in Construction Sites Michael Darms, Matthias Komar, Dirk Waldbauer, Stefan Lüke Lanes in Construction Sites Roadway is often bounded by elevated objects (e.g. guidance walls)
Non-Destructive Bridge Deck Assessment using Image Processing and Infrared Thermography. Masato Matsumoto 1
 Non-Destructive Bridge Deck Assessment using Image Processing and Infrared Thermography Abstract Masato Matsumoto 1 Traditionally, highway bridge conditions have been monitored by visual inspection with
Non-Destructive Bridge Deck Assessment using Image Processing and Infrared Thermography Abstract Masato Matsumoto 1 Traditionally, highway bridge conditions have been monitored by visual inspection with
S&T Stakeholders Conference
 S&T Stakeholders Conference May 21-24, 2007 Future Attribute Screening Technology Mobile Module (FAST M 2 ) Innovation/HSARPA HIP Bob Burns Program Manager Office of Innovation/Human Factors Division Science
S&T Stakeholders Conference May 21-24, 2007 Future Attribute Screening Technology Mobile Module (FAST M 2 ) Innovation/HSARPA HIP Bob Burns Program Manager Office of Innovation/Human Factors Division Science
CHAPTER 7: ALIGNMENT
 QUALITY MANAGEMENT 7.1 Description CHAPTER 7: ALIGNMENT Creation of an additional alignment file and a summary of the total lane miles per lift (rounded to the nearest hundredth) for the given material
QUALITY MANAGEMENT 7.1 Description CHAPTER 7: ALIGNMENT Creation of an additional alignment file and a summary of the total lane miles per lift (rounded to the nearest hundredth) for the given material
Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity
 Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity Zak M. Kassas Autonomous Systems Perception, Intelligence, and Navigation (ASPIN) Laboratory University of California, Riverside
Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity Zak M. Kassas Autonomous Systems Perception, Intelligence, and Navigation (ASPIN) Laboratory University of California, Riverside
SOME ASPECT AND PERSPECTIVES OF IMPLEMENTATION OF THE NATIONAL POLICY IN THE FIELD OF EXPLORATION AND PEACEFUL USES OF OUTER SPACE
 SOME ASPECT AND PERSPECTIVES OF IMPLEMENTATION OF THE NATIONAL POLICY IN THE FIELD OF EXPLORATION AND PEACEFUL USES OF OUTER SPACE 1 Folie 1 NKS Raumfahrt, Dr. Adrian klein Background National Academy
SOME ASPECT AND PERSPECTIVES OF IMPLEMENTATION OF THE NATIONAL POLICY IN THE FIELD OF EXPLORATION AND PEACEFUL USES OF OUTER SPACE 1 Folie 1 NKS Raumfahrt, Dr. Adrian klein Background National Academy
NJDEP GPS Data Collection Standards for GIS Data Development
 NJDEP GPS Data Collection Standards for GIS Data Development Bureau of Geographic Information Systems Office of Information Resource Management April 24 th, 2017 Table of Contents 1.0 Introduction... 3
NJDEP GPS Data Collection Standards for GIS Data Development Bureau of Geographic Information Systems Office of Information Resource Management April 24 th, 2017 Table of Contents 1.0 Introduction... 3
Electronic toll service via ITS-G5 communication
 45 46 TH ASECAP STUDY STUDY & INFORMATION & INFORMATION DAYS DAYS 2017 Electronic toll service via ITS-G5 communication 8 June 2018, Ljubljana, Slovenia www.asecapdays.com Guy Frémont Malalatiana Randriamasy
45 46 TH ASECAP STUDY STUDY & INFORMATION & INFORMATION DAYS DAYS 2017 Electronic toll service via ITS-G5 communication 8 June 2018, Ljubljana, Slovenia www.asecapdays.com Guy Frémont Malalatiana Randriamasy
MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE
 MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE First Annual 2018 National Mobility Summit of US DOT University Transportation Centers (UTC) April 12, 2018 Washington, DC Research Areas Cooperative
MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE First Annual 2018 National Mobility Summit of US DOT University Transportation Centers (UTC) April 12, 2018 Washington, DC Research Areas Cooperative
Space assets for demining assistance?
 Space assets for demining assistance? Thomas Bouvet European Space Agency 27 April 2010 Introduction We believe that the efficiency of the land release process could still be improved, thanks to existing
Space assets for demining assistance? Thomas Bouvet European Space Agency 27 April 2010 Introduction We believe that the efficiency of the land release process could still be improved, thanks to existing
CHAPTER 14: TRAFFIC SIGNAL STANDARDS Introduction and Goals Administration Standards Standard Attachments 14.
 14.00 Introduction and Goals 14.01 Administration 14.02 Standards 14.03 Standard Attachments 14.1 14.00 INTRODUCTION AND GOALS The purpose of this chapter is to outline the City s review process for traffic
14.00 Introduction and Goals 14.01 Administration 14.02 Standards 14.03 Standard Attachments 14.1 14.00 INTRODUCTION AND GOALS The purpose of this chapter is to outline the City s review process for traffic