Active Road Management Assisted by Satellite. ARMAS Phase II
|
|
|
- Elfreda Griffin
- 6 years ago
- Views:
Transcription

1 Active Road Management Assisted by Satellite ARMAS Phase II European Roundtable on Intelligent Roads Brussels, 26 January
2 2 Table of Contents Overview of ARMAS System Architecture Field Trials Conclusions
3 3 Table of Contents Overview of ARMAS System Architecture Field Trials Conclusions
4 Overview of ARMAS Technical Feasibility; Detailed analysis of key issues European Space Agency s (ESA) identified project Active in Phase I; Road Management Assisted by Satellite (ARMAS) aims at High-Level Architecture; transforming the transport infrastructure (roads, bridges, tunnels, urban areas) into safer and more customer-friendly Legal Issues (Privacy, Liability); the selected functionalities: environments, by: Rough Improving prototypes Safety; developed for main Increasing entities; Warnings Provision ; Dynamic Traffic Management capabilities; SOS Request ; Providing Electronic Fee Collection mechanisms; Development of a demonstrator for EFC based on Satellite Positioning ; ARMAS Phase I ARMAS Phase II Feasibility Study Test-bed development focused on EFC based in Satellite Positioning Time Frame Phase I Phase II Mar 03 Dec 03 Mar 04 Dec 05 4



5 Overview of ARMAS EFC based on Satellite Positioning Corridor Pricing/Passage Tolling; Congestion Zones/Cordon Pricing; Distance Based Pricing; Combination; Warnings Provision Provide information about hazards on the road ahead to the driver. SOS Request Electronic SOS request from inside the car: By the driver; Triggered automatically by car sensors. 5
6 6 Table of Contents Overview of ARMAS System Architecture Field Trials Conclusions

7 System Architecture DSRC GPS, EGNOS Galileo Road-Side and Central Equipment ARMAS Fixed-Part AFP GSM, GPRS UMTS CESARE II ISO MISTER E-Merge GTP On-Board Unit In-Car System ICS GPS SiS + EGNOS SiS + EGNOS over GPRS DSRC GSM Voice + GSM Data + GPRS Inertial Sensors (Gyros, Accel., Magneto.) Map Matching RAIM 7
8 System Architecture: Split of Functionality The definition of the architectural split between OBU and RSCE was made through a process of analysing different alternatives and quantifying those alternatives according to a set of specified attributes: Privacy; Social Accessibility; Cost; Scalability; Performance & Accuracy; Reliability & Maintenance; Interoperability; Fraud Robustness & Enforcement; Evidential Performance; Ability to Support Value-Added Services; Optional Functionality; Stakeholder Acceptance. Data Collection RSE Map Matching GNSS Position Enhancement Position Integrity Position Data Feature Recognition Segment Usage Route/ Topology Matching Road Usage Candidate Scoring Road Usage Charge Calculation Charge Record INS Sensors A B C1 C2 D 8
9 System Architecture: Split of Functionality 1. The attributes mentioned before were attributed a weight that will provide a relative importance between the attributes. 2. Later it was defined a rank for each architecture (A to D) and having in consideration the mentioned attributes. 3. Based on the weights and ranks obtained an overall was calculated. It should also be mentioned that this exercise was made according two visions: Private Cars and HGVs. Data Collection ICS AFP RSE Map Matching GNSS Position Enhancement Position Integrity Position Data Feature Recognition Segment Usage Route/ Topology Matching Road Usage Candidate Scoring Road Usage Charge Calculation Charge Record INS Sensors C1 9
10 System Architecture: Map Matching Gantries 10
11 11 Table of Contents Overview of ARMAS System Architecture Field Trials Conclusions

12 Field Trials Scenario 12


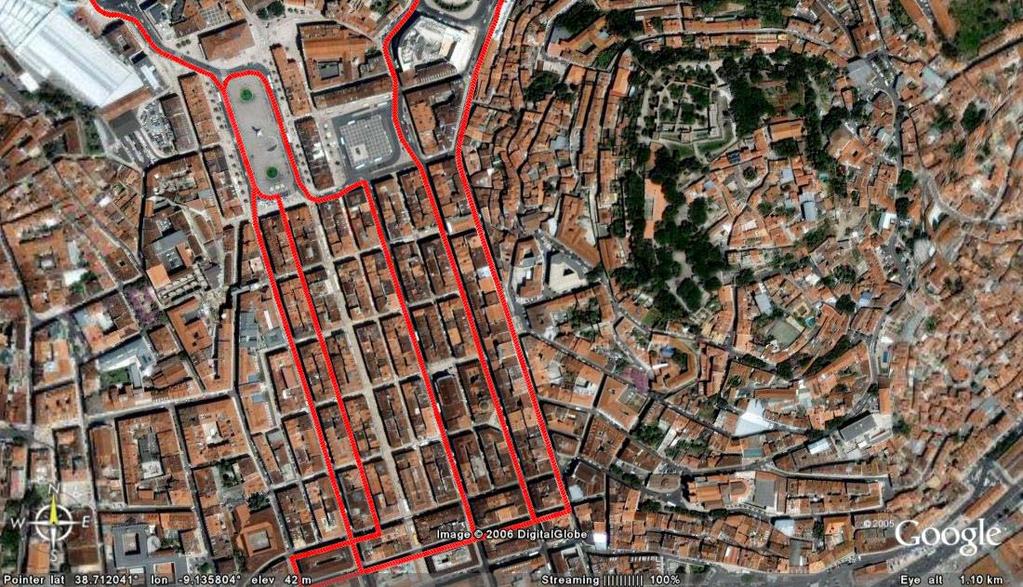
13 13 Field Trials: Dense Urban Scenario Congestion Charge Zone


14 14 Field Trials: Urban Scenario Congestion Charge Zone

15 Trial Run Example: Dense Urban Scenario 15

16 Trial Run Example: Urban Scenario 16



17 17 Geodetic GPS Truth Source Analysis Two different vehicles were used having the GNSS and roving GGPS antennas placed on their roofs. The position solutions derived from GGPS post-processing were taken as being the Truth Source. However, being GGPS as vulnerable to obstructions as a regular GPS receiver, the positions collected were much less than those collected from ICS, naturally with a larger impact in dense urban areas.
18 18 Geodetic GPS Truth Source: Accuracy ICS ACCURACY (COMPARED AGAINST GGPS) (metres) AVERAGE STD DEVIATION PERCENTILE 75 PERCENTILE 95 PERCENTILE 99 MAXIMUM MINIMUM 10,26 21,56 7,11 37,87 81,78 374,46 0,07
19 19 Road Centreline Truth Analysis Since Carrier Phase Differential availability in dense/built up urban environments can be intermittent and so cannot be relied upon exclusively to provide a truth source throughout the trial environments, additional analysis was performed using Linework Truth. Linework Truth provides a good coverage of reference positional information, for all of the test routes throughout all of the test environments. While the truth takes the form of a line and the nature of the correlation with test data will be nearest point, it provides a good reference to compare performance in many environmental conditions. To create the highly accurate linework required for truth data it was used the road centreline of Navteq maps.

20 Road Centreline Truth Source 20
21 21 Road Centreline Truth Source: Accuracy ICS ACCURACY (COMPARED AGAINST ROAD CENTRELINE) (metres) Global Geographic Scenario Dense Urban Open City Rural Day Time of Day Twilight Night AVERAGE 8,62 17,25 6,43 4,07 10,61 6,09 6,17 STD DEVIATION 22,14 38,20 7,93 5,18 27,70 9,47 13,31 PERCENTILE 75 8,12 17,27 8,50 5,28 9,73 6,80 6,38 PERCENTILE 95 25,70 55,81 18,71 10,17 34,97 19,78 18,42 PERCENTILE 99 81,99 194,24 32,76 15,34 111,62 46,54 56,39 MAXIMUM 820,37 820,37 147,62 109,86 820,37 200,20 289,29 MINIMUM 0,00 0,00 0,00 0,00 0,00 0,00 0,00
22 22 Road Centreline Truth Source: Availability ICS AVAILABILITY (COMPARED AGAINST ROAD CENTRELINE) Global Geographic Scenario Dense Urban Open City Rural Day Time of Day Twilight Night OVERALL 99,20% 98,53% 98,82% 99,94% 99,30% 99,98% 98,20% Error < 3m 37,48% 23,66% 37,19% 47,35% 33,74% 39,53% 44,76% Error < 8m 74,49% 52,86% 72,26% 91,13% 68,99% 80,74% 81,96% Error < 20m 92,36% 79,29% 95,46% 99,40% 89,95% 95,05% 95,69% Error < 50m 97,85% 93,79% 99,40% 99,64% 96,97% 99,07% 98,82%
 tool developed for EUROCONTROL and made available to us by ESA.")
23 23 GPS only versus GPS and EGNOS Analysis With the objective of comparing the performance of the positioning using GPS and EGNOS with the positioning using GPS only, we used the PEGASUS (version ) tool developed for EUROCONTROL and made available to us by ESA. The major reason for the use of this tool is that we were able to use EGNOS archived data and apply it to all the raw GPS positions available, bypassing the problem of EGNOS SiS availability. Using the road centreline truth source we then performed an RNPlike analysis on the produced data.

24 GPS only versus GPS and EGNOS 24

25 GPS only versus GPS and EGNOS 25
26 26 GPS only versus GPS and EGNOS : Accuracy Accuracy by GEOGRAPHICAL SCENARIO (metres) Type Geo Scenario Average Error (m) Error STD Deviation Percentile 75 Percentile 95 Percentile 99 Min. Max. Dense Urban GPS + EGNOS Urban Rural Dense Urban GPS Only Urban Rural
27 27 Table of Contents Overview of ARMAS System Architecture Field Trials Conclusions
28 Conclusions As expected, the GPS+EGNOS+INS positioning solution is good enough for the tested tolling situations. Accurate charging was produced although an extensive trial with a large number of vehicles is necessary for statistical validity. The only environment where the results are not optimal is the Dense Urban where, as expected, the performance of the system becomes heavily dependant on the performance of the INS, Map- Matching Algorithms and if applicable, tolling scenario (e.g. the definition of the Charging Zone boundaries). The other two system functionalities, SOS Request and Warnings Provision were easily implemented using the base tolling platform which proves that the approach followed is valid for providing more service and business oriented functionalities to the end customer. Besides being the basis of the Integrity concept of the system, EGNOS improved also the accuracy of the positioning. 28
29 Conclusions GPRS proved to be enough for uploading the charge-related data gathered in the OBU. However, for the dissemination of EGNOS based on SISNeT, the GPRS communication channel showed some problems: High latency; Low bandwidth; Coverage problems; We concluded that in order to be able to have a reliable and complete EGNOS feed the ideal solution would be transmission based on radio broadcast such as RDS or DAB although UMTS should already bring a very noticeable improvement. 29
30 30 Project Achievements ICS prototypes + AFP prototype (with COTS hardware) made available for further testing and trials; Platform able to test several diferent scenarios and applications; Hands-on knowledge of the problems/benefits of the use of ISO and MISTER; Field Trial data that raised several issues but overall confirmed the validity of the project choices; Comprehensive body of knowledge about all the technical issues related with EFC based in GNSS; Enabling the consortia members to engage with key industry stakeholders;

31 Questions? Paulo Alexandre Gomes Avenida Conselheiro Fernando Sousa, nº 19 12º Lisboa, Portugal Tel: Fax: Project Web Site: 31
ARMAS PHASE II - ACTIVE ROAD MANAGEMENT ASSISTED BY SATELLITE
 ARMAS PHASE II - ACTIVE ROAD MANAGEMENT ASSISTED BY SATELLITE PAULO GOMES (1), JOÃO CANÁRIO (2), PAULO ANDRÉ (3), ROB POSTEMA (4), HARVEY APPELBE (5) (1) Skysoft Portugal Av. Conselheiro Fernando de Sousa
ARMAS PHASE II - ACTIVE ROAD MANAGEMENT ASSISTED BY SATELLITE PAULO GOMES (1), JOÃO CANÁRIO (2), PAULO ANDRÉ (3), ROB POSTEMA (4), HARVEY APPELBE (5) (1) Skysoft Portugal Av. Conselheiro Fernando de Sousa
GALILEO Research and Development Activities. Second Call. Area 3. Statement of Work
 GALILEO Research and Development Activities Second Call Area 3 Innovation by Small and Medium Enterprises Statement of Work Rue du Luxembourg, 3 B 1000 Brussels Tel +32 2 507 80 00 Fax +32 2 507 80 01
GALILEO Research and Development Activities Second Call Area 3 Innovation by Small and Medium Enterprises Statement of Work Rue du Luxembourg, 3 B 1000 Brussels Tel +32 2 507 80 00 Fax +32 2 507 80 01
Active Road Management Assisted by Satellite - ARMAS Phase II
 Active Road Management Assisted by Satellite - ARMAS Phase II PAULO GOMES, ARMAS PHASE II TECHNICAL COORDINATOR, SKYSOFT PORTUGAL JOÃO CANÁRIO, ARMAS PHASE II PROJECT MANAGER, SKYSOFT PORTUGAL PAULO ANDRÉ,
Active Road Management Assisted by Satellite - ARMAS Phase II PAULO GOMES, ARMAS PHASE II TECHNICAL COORDINATOR, SKYSOFT PORTUGAL JOÃO CANÁRIO, ARMAS PHASE II PROJECT MANAGER, SKYSOFT PORTUGAL PAULO ANDRÉ,
GALILEO Research and Development Activities. Second Call. Area 1B. Interference Detection Mitigation and Isolation.
 GALILEO Research and Development Activities Second Call Area 1B Interference Detection Mitigation and Isolation Statement of Work Rue du Luxembourg, 3 B 1000 Brussels Tel +32 2 507 80 00 Fax +32 2 507
GALILEO Research and Development Activities Second Call Area 1B Interference Detection Mitigation and Isolation Statement of Work Rue du Luxembourg, 3 B 1000 Brussels Tel +32 2 507 80 00 Fax +32 2 507
European GNSS: Galileo and EGNOS for next generation Road Charging
 European GNSS: Galileo and EGNOS for next generation Road Charging 20 th October 2014 Gian Gherardo Calini European GNSS Agency (GSA) GNSS have made a huge impact in our society it is key in Road transportation
European GNSS: Galileo and EGNOS for next generation Road Charging 20 th October 2014 Gian Gherardo Calini European GNSS Agency (GSA) GNSS have made a huge impact in our society it is key in Road transportation
Demonstrating Performance Levels of Positioning Technologies
 Demonstrating Performance Levels of Positioning Technologies Version 2.1 June 2009 GMV Aerospace and Defence S.A. c/ Isaac Newton 11 P.T.M. - Tres Cantos E-28760 Madrid SPAIN Tel.: +34-918 072 100 Fax:
Demonstrating Performance Levels of Positioning Technologies Version 2.1 June 2009 GMV Aerospace and Defence S.A. c/ Isaac Newton 11 P.T.M. - Tres Cantos E-28760 Madrid SPAIN Tel.: +34-918 072 100 Fax:
Evaluating EGNOS technology in an ITS driving assistance application
 Evaluating EGNOS technology in an ITS driving assistance application A. Gómez Skarmeta H. Martínez Barberá M. Zamora Izquierdo J. Cánovas Quiñonero L. Tomás Balibrea Dept. of Communications and Information
Evaluating EGNOS technology in an ITS driving assistance application A. Gómez Skarmeta H. Martínez Barberá M. Zamora Izquierdo J. Cánovas Quiñonero L. Tomás Balibrea Dept. of Communications and Information
NovAtel s. Performance Analysis October Abstract. SPAN on OEM6. SPAN on OEM6. Enhancements
 NovAtel s SPAN on OEM6 Performance Analysis October 2012 Abstract SPAN, NovAtel s GNSS/INS solution, is now available on the OEM6 receiver platform. In addition to rapid GNSS signal reacquisition performance,
NovAtel s SPAN on OEM6 Performance Analysis October 2012 Abstract SPAN, NovAtel s GNSS/INS solution, is now available on the OEM6 receiver platform. In addition to rapid GNSS signal reacquisition performance,
Update on enhanced satellite navigation services empowering innovative solutions in Smart Mobility
 Update on enhanced satellite navigation services empowering innovative solutions in Smart Mobility 8th June 2018- Technical session 1 Latest developments in innovative ITS activities Alberto Fernández
Update on enhanced satellite navigation services empowering innovative solutions in Smart Mobility 8th June 2018- Technical session 1 Latest developments in innovative ITS activities Alberto Fernández
RESPONSE TO THE HOUSE OF COMMONS TRANSPORT SELECT COMMITTEE INQUIRY INTO GALILEO. Memorandum submitted by The Royal Academy of Engineering
 RESPONSE TO THE HOUSE OF COMMONS TRANSPORT SELECT COMMITTEE INQUIRY INTO GALILEO Memorandum submitted by The Royal Academy of Engineering September 2004 Executive Summary The Royal Academy of Engineering
RESPONSE TO THE HOUSE OF COMMONS TRANSPORT SELECT COMMITTEE INQUIRY INTO GALILEO Memorandum submitted by The Royal Academy of Engineering September 2004 Executive Summary The Royal Academy of Engineering
Technical and Commercial Challenges of V2V and V2I networks
 Technical and Commercial Challenges of V2V and V2I networks Ravi Puvvala Founder & CEO, Savari Silicon Valley Automotive Open Source Meetup Sept 27 th 2012 Savari has developed an automotive grade connected
Technical and Commercial Challenges of V2V and V2I networks Ravi Puvvala Founder & CEO, Savari Silicon Valley Automotive Open Source Meetup Sept 27 th 2012 Savari has developed an automotive grade connected
The experimental evaluation of the EGNOS safety-of-life services for railway signalling
 Computers in Railways XII 735 The experimental evaluation of the EGNOS safety-of-life services for railway signalling A. Filip, L. Bažant & H. Mocek Railway Infrastructure Administration, LIS, Pardubice,
Computers in Railways XII 735 The experimental evaluation of the EGNOS safety-of-life services for railway signalling A. Filip, L. Bažant & H. Mocek Railway Infrastructure Administration, LIS, Pardubice,
GALILEO Research and Development Activities. Second Call. Area 1A. Statement of Work
 GALILEO Research and Development Activities Second Call Area 1A GNSS Introduction in the Maritime Sector Statement of Work Rue du Luxembourg, 3 B 1000 Brussels Tel +32 2 507 80 00 Fax +32 2 507 80 01 www.galileoju.com
GALILEO Research and Development Activities Second Call Area 1A GNSS Introduction in the Maritime Sector Statement of Work Rue du Luxembourg, 3 B 1000 Brussels Tel +32 2 507 80 00 Fax +32 2 507 80 01 www.galileoju.com
V2X-Locate Positioning System Whitepaper
 V2X-Locate Positioning System Whitepaper November 8, 2017 www.cohdawireless.com 1 Introduction The most important piece of information any autonomous system must know is its position in the world. This
V2X-Locate Positioning System Whitepaper November 8, 2017 www.cohdawireless.com 1 Introduction The most important piece of information any autonomous system must know is its position in the world. This
NAV CAR Lane-sensitive positioning and navigation for innovative ITS services AMAA, May 31 st, 2012 E. Schoitsch, E. Althammer, R.
 NAV CAR Lane-sensitive positioning and navigation for innovative ITS services AMAA, May 31 st, 2012 E. Schoitsch, E. Althammer, R. Kloibhofer (AIT), R. Spielhofer, M. Reinthaler, P. Nitsche (ÖFPZ), H.
NAV CAR Lane-sensitive positioning and navigation for innovative ITS services AMAA, May 31 st, 2012 E. Schoitsch, E. Althammer, R. Kloibhofer (AIT), R. Spielhofer, M. Reinthaler, P. Nitsche (ÖFPZ), H.
Lessons learnt and recommendations
 ECOTAXE a Liability Critical Application HGV Road Pricing in France Lessons learnt and recommendations SUMMARY 1 ECOTAXE, GNSS based HGV road pricing 2 Lessons learnt 3 Recommendations 2 GNSS Lab Simulations
ECOTAXE a Liability Critical Application HGV Road Pricing in France Lessons learnt and recommendations SUMMARY 1 ECOTAXE, GNSS based HGV road pricing 2 Lessons learnt 3 Recommendations 2 GNSS Lab Simulations
Monitoring the EGNOS SYSTEM TEST BED at the Radio Navigation Experimentation Unit (RNEU)
") Monitoring the EGNOS SYSTEM TEST BED at the Radio Navigation Experimentation Unit (RNEU) ESTEC/ESA 2nd ESTB Workshop, Nice, 12th November 2001 What is the RNEU? Specialised facilities located at ESTEC/TOS-ET
Monitoring the EGNOS SYSTEM TEST BED at the Radio Navigation Experimentation Unit (RNEU) ESTEC/ESA 2nd ESTB Workshop, Nice, 12th November 2001 What is the RNEU? Specialised facilities located at ESTEC/TOS-ET
April - 1 May, EGNOS Use in Road Applications. DI FAZIO Antonella Telespazio S. p. A. Via Tiburtina Rome ITALY
 2333-14 Workshop on Science Applications of GNSS in Developing Countries (11-27 April), followed by the: Seminar on Development and Use of the Ionospheric NeQuick Model (30 April-1 May) 11 April - 1 May,
2333-14 Workshop on Science Applications of GNSS in Developing Countries (11-27 April), followed by the: Seminar on Development and Use of the Ionospheric NeQuick Model (30 April-1 May) 11 April - 1 May,
GNSS MONITORING NETWORKS
 SPACE GNSS MONITORING NETWORKS Satellite communications, earth observation, navigation and positioning and control stations indracompany.com GNSS MONITORING NETWORKS GNSS MONITORING NETWORKS Indra s solutions
SPACE GNSS MONITORING NETWORKS Satellite communications, earth observation, navigation and positioning and control stations indracompany.com GNSS MONITORING NETWORKS GNSS MONITORING NETWORKS Indra s solutions
A THEORETICAL AND PRACTICAL ANALYSIS OF GNSS BASED ROAD PRICING SYSTEMS, CONSIDERING THE EGNOS/SISNET CONTRIBUTIONS
 A THEORETICAL AND PRACTICAL ANALYSIS OF GNSS BASED ROAD PRICING SYSTEMS, CONSIDERING THE EGNOS/SISNET CONTRIBUTIONS 8-10 December 2004, ESA/ESTEC, Noordwijk, the Netherlands Benito Úbeda (1), Rafael Toledo
A THEORETICAL AND PRACTICAL ANALYSIS OF GNSS BASED ROAD PRICING SYSTEMS, CONSIDERING THE EGNOS/SISNET CONTRIBUTIONS 8-10 December 2004, ESA/ESTEC, Noordwijk, the Netherlands Benito Úbeda (1), Rafael Toledo
WHITE PAPER Saving Lives with Intelligent In-Vehicle Systems
 WHITE PAPER Saving Lives with Intelligent In-Vehicle Systems For more information, please visit: 2012 IEIMobile Approximately 1.2 million people die from traffic injuries and accidents each year. It has
WHITE PAPER Saving Lives with Intelligent In-Vehicle Systems For more information, please visit: 2012 IEIMobile Approximately 1.2 million people die from traffic injuries and accidents each year. It has
Robust Positioning for Urban Traffic
 Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
High Precision GNSS in Automotive
 High Precision GNSS in Automotive Jonathan Auld, VP Engineering and Safety 6, March, 2018 2 Global OEM Positioning Solutions and Services for Land, Sea, and Air. GNSS in Automotive Today Today the primary
High Precision GNSS in Automotive Jonathan Auld, VP Engineering and Safety 6, March, 2018 2 Global OEM Positioning Solutions and Services for Land, Sea, and Air. GNSS in Automotive Today Today the primary
interactive IP: Perception platform and modules
 interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
Experiences with Fugro's Real Time GPS/GLONASS Orbit/Clock Decimeter Level Precise Positioning System
 Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 13-14, 2009 Sensors Experiences with Fugro's Real Time GPS/GLONASS Orbit/Clock Decimeter Level Precise Positioning System Ole Ørpen and
Return to Session Directory DYNAMIC POSITIONING CONFERENCE October 13-14, 2009 Sensors Experiences with Fugro's Real Time GPS/GLONASS Orbit/Clock Decimeter Level Precise Positioning System Ole Ørpen and
RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8)
 OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8)") Rec. ITU-R M.1310 1 RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8) Rec. ITU-R M.1310 (1997) Summary This Recommendation
Rec. ITU-R M.1310 1 RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8) Rec. ITU-R M.1310 (1997) Summary This Recommendation
GALILEO JOINT UNDERTAKING
 GALILEO Research and development activities First call Activity A User receiver preliminary development STATEMENT OF WORK GJU/03/094/issue2/OM/ms Issue 2 094 issue2 6th FP A SOW 1 TABLE OF CONTENTS 1.
GALILEO Research and development activities First call Activity A User receiver preliminary development STATEMENT OF WORK GJU/03/094/issue2/OM/ms Issue 2 094 issue2 6th FP A SOW 1 TABLE OF CONTENTS 1.
European GNSS Evolution
 Ref. Ares(204)902599 - /06/204 European GNSS Evolution Hermann Ebner Galileo and EGNOS Programme Management DG Enterprise and Industry Content Introduction 2 2 Major Challenges for EGNSS Evolution 3 EGNSS
Ref. Ares(204)902599 - /06/204 European GNSS Evolution Hermann Ebner Galileo and EGNOS Programme Management DG Enterprise and Industry Content Introduction 2 2 Major Challenges for EGNSS Evolution 3 EGNSS
Connected Car Networking
 Connected Car Networking Teng Yang, Francis Wolff and Christos Papachristou Electrical Engineering and Computer Science Case Western Reserve University Cleveland, Ohio Outline Motivation Connected Car
Connected Car Networking Teng Yang, Francis Wolff and Christos Papachristou Electrical Engineering and Computer Science Case Western Reserve University Cleveland, Ohio Outline Motivation Connected Car
Qosmotec. Software Solutions GmbH. Technical Overview. QPER C2X - Car-to-X Signal Strength Emulator and HiL Test Bench. Page 1
 Qosmotec Software Solutions GmbH Technical Overview QPER C2X - Page 1 TABLE OF CONTENTS 0 DOCUMENT CONTROL...3 0.1 Imprint...3 0.2 Document Description...3 1 SYSTEM DESCRIPTION...4 1.1 General Concept...4
Qosmotec Software Solutions GmbH Technical Overview QPER C2X - Page 1 TABLE OF CONTENTS 0 DOCUMENT CONTROL...3 0.1 Imprint...3 0.2 Document Description...3 1 SYSTEM DESCRIPTION...4 1.1 General Concept...4
Customer Showcase > Defense and Intelligence
 Customer Showcase Skyline TerraExplorer is a critical visualization technology broadly deployed in defense and intelligence, public safety and security, 3D geoportals, and urban planning markets. It fuses
Customer Showcase Skyline TerraExplorer is a critical visualization technology broadly deployed in defense and intelligence, public safety and security, 3D geoportals, and urban planning markets. It fuses
European perspective on Wireless Communications
 The French National Institute for Transport and Safety Research European perspective on Wireless Communications Marc Heddebaut, Christophe Gransart, Jean Rioult Laboratory of Transport Electronics, Waves
The French National Institute for Transport and Safety Research European perspective on Wireless Communications Marc Heddebaut, Christophe Gransart, Jean Rioult Laboratory of Transport Electronics, Waves
SPAN Technology System Characteristics and Performance
 SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
S-Band: a new space for mobile communication in Europe Orazio Pulvirenti MSS Project Manager Eutelsat Innovation Team
 S-Band: a new space for mobile communication in Europe Orazio Pulvirenti MSS Project Manager Eutelsat Innovation Team Evolutions in Satellite Telecommunication Ground Segments Noordwijk, June 5 th 2008
S-Band: a new space for mobile communication in Europe Orazio Pulvirenti MSS Project Manager Eutelsat Innovation Team Evolutions in Satellite Telecommunication Ground Segments Noordwijk, June 5 th 2008
GPS-Based Navigation & Positioning Challenges in Communications- Enabled Driver Assistance Systems
 GPS-Based Navigation & Positioning Challenges in Communications- Enabled Driver Assistance Systems Chaminda Basnayake, Ph.D. Senior Research Engineer General Motors Research & Development and Planning
GPS-Based Navigation & Positioning Challenges in Communications- Enabled Driver Assistance Systems Chaminda Basnayake, Ph.D. Senior Research Engineer General Motors Research & Development and Planning
Accuracy Performance Test Methodology for Satellite Locators on Board of Trains Developments and results from the EU Project APOLO
 ID No: 459 Accuracy Performance Test Methodology for Satellite Locators on Board of Trains Developments and results from the EU Project APOLO Author: Dipl. Ing. G.Barbu, Project Manager European Rail Research
ID No: 459 Accuracy Performance Test Methodology for Satellite Locators on Board of Trains Developments and results from the EU Project APOLO Author: Dipl. Ing. G.Barbu, Project Manager European Rail Research
Status of the European EGNOS and Galileo Programmes. Frank Udnaes Galileo policy and Infrastructure group EC DG-TREN. June 2008
 Status of the European EGNOS and Galileo Programmes Frank Udnaes Galileo policy and Infrastructure group EC DG-TREN EUROPEAN COMMISSION z June 2008 Galileo An infrastructure 30 satellite Constellation
Status of the European EGNOS and Galileo Programmes Frank Udnaes Galileo policy and Infrastructure group EC DG-TREN EUROPEAN COMMISSION z June 2008 Galileo An infrastructure 30 satellite Constellation
3-DEMON MONITORING PLATFORM: EXAMPLES OF APPLICATIONS IN STRUCTURAL AND GEOTECHNICAL MONITORING PROJECTS
 3-DEMON MONITORING PLATFORM: EXAMPLES OF APPLICATIONS IN STRUCTURAL AND GEOTECHNICAL MONITORING PROJECTS Luca MANETTI, Daniele INAUDI and Branko GLISIC Smartec SA, Switzerland Abstract: The 3DeMoN (3-Dimentional
3-DEMON MONITORING PLATFORM: EXAMPLES OF APPLICATIONS IN STRUCTURAL AND GEOTECHNICAL MONITORING PROJECTS Luca MANETTI, Daniele INAUDI and Branko GLISIC Smartec SA, Switzerland Abstract: The 3DeMoN (3-Dimentional
Positioning, location data and GNSS as solution for Autonomous driving
 Positioning, location data and GNSS as solution for Autonomous driving Jarkko Koskinen, Heidi Kuusniemi, Juha Hyyppä, Sarang Thombre and Martti Kirkko-Jaakkola FGI, NLS Definition of the Arctic 66 34 N
Positioning, location data and GNSS as solution for Autonomous driving Jarkko Koskinen, Heidi Kuusniemi, Juha Hyyppä, Sarang Thombre and Martti Kirkko-Jaakkola FGI, NLS Definition of the Arctic 66 34 N
RECOMMENDATION ITU-R BS
 Rec. ITU-R BS.1350-1 1 RECOMMENDATION ITU-R BS.1350-1 SYSTEMS REQUIREMENTS FOR MULTIPLEXING (FM) SOUND BROADCASTING WITH A SUB-CARRIER DATA CHANNEL HAVING A RELATIVELY LARGE TRANSMISSION CAPACITY FOR STATIONARY
Rec. ITU-R BS.1350-1 1 RECOMMENDATION ITU-R BS.1350-1 SYSTEMS REQUIREMENTS FOR MULTIPLEXING (FM) SOUND BROADCASTING WITH A SUB-CARRIER DATA CHANNEL HAVING A RELATIVELY LARGE TRANSMISSION CAPACITY FOR STATIONARY
Measuring GALILEOs multipath channel
 Measuring GALILEOs multipath channel Alexander Steingass German Aerospace Center Münchnerstraße 20 D-82230 Weßling, Germany alexander.steingass@dlr.de Co-Authors: Andreas Lehner, German Aerospace Center,
Measuring GALILEOs multipath channel Alexander Steingass German Aerospace Center Münchnerstraße 20 D-82230 Weßling, Germany alexander.steingass@dlr.de Co-Authors: Andreas Lehner, German Aerospace Center,
Web of Things for Connected Vehicles. Soumya Kanti Datta Communication Systems Department
 Web of Things for Connected Vehicles Soumya Kanti Datta Communication Systems Department Email: Soumya-Kanti.Datta@eurecom.fr Roadmap Introduction Web of Things (WoT) Architecture & Components Prototyping
Web of Things for Connected Vehicles Soumya Kanti Datta Communication Systems Department Email: Soumya-Kanti.Datta@eurecom.fr Roadmap Introduction Web of Things (WoT) Architecture & Components Prototyping
Projekt Sichere Intelligente Mobilität Testfeld Deutschland. Project Safe Intelligent Mobilty Test Field Germany
 Projekt Sichere Intelligente Mobilität Testfeld Deutschland Project Safe Intelligent Mobilty Test Field Germany ETSI TC ITS Workshop 4-6 February 2009 ETSI, Sophia Antipolis, France Dr. Christian Weiß,
Projekt Sichere Intelligente Mobilität Testfeld Deutschland Project Safe Intelligent Mobilty Test Field Germany ETSI TC ITS Workshop 4-6 February 2009 ETSI, Sophia Antipolis, France Dr. Christian Weiß,
Technical Specifications Document. for. Satellite-Based Augmentation System (SBAS) Testbed
 Testbed") Technical Specifications Document for Satellite-Based Augmentation System (SBAS) Testbed Revision 3 13 June 2017 Table of Contents Acronym Definitions... 3 1. Introduction... 4 2. SBAS Testbed Realisation...
Technical Specifications Document for Satellite-Based Augmentation System (SBAS) Testbed Revision 3 13 June 2017 Table of Contents Acronym Definitions... 3 1. Introduction... 4 2. SBAS Testbed Realisation...
TACOT Project. Trusted multi Application receiver for Trucks. Bordeaux, 4 June 2014
 TACOT Project Trusted multi Application receiver for Trucks Bordeaux, 4 June 2014 Agenda TACOT Context & Solution Technical developments Test & Validation results Conclusions GNSS ease our lives GNSS is
TACOT Project Trusted multi Application receiver for Trucks Bordeaux, 4 June 2014 Agenda TACOT Context & Solution Technical developments Test & Validation results Conclusions GNSS ease our lives GNSS is
GNSS and M2M for Automated Driving in Japan Masao FUKUSHIMA SIP Sub-Program Director ITS Technical Consultant, NISSAN MOTOR CO.,LTD May. 15.
 ICT SPRING EUROPE 2018 GNSS and M2M for Automated Driving in Japan Masao FUKUSHIMA SIP Sub-Program Director ITS Technical Consultant, NISSAN MOTOR CO.,LTD May. 15. 2018 SIP : Cross-Ministerial Strategic
ICT SPRING EUROPE 2018 GNSS and M2M for Automated Driving in Japan Masao FUKUSHIMA SIP Sub-Program Director ITS Technical Consultant, NISSAN MOTOR CO.,LTD May. 15. 2018 SIP : Cross-Ministerial Strategic
Monitoring Station for GNSS and SBAS
 Monitoring Station for GNSS and SBAS Pavel Kovář, Czech Technical University in Prague Josef Špaček, Czech Technical University in Prague Libor Seidl, Czech Technical University in Prague Pavel Puričer,
Monitoring Station for GNSS and SBAS Pavel Kovář, Czech Technical University in Prague Josef Špaček, Czech Technical University in Prague Libor Seidl, Czech Technical University in Prague Pavel Puričer,
Een GPS naderingshulpmiddel voor de kleine luchtvaart
 Technische ontwikkelingen: Een GPS naderingshulpmiddel voor de kleine luchtvaart Christian Tiberius Faculteit Luchtvaart- en Ruimtevaarttechniek TU Delft WORKSHOP Is er nog Lucht(ruim) voor de Kleine Luchtvaart
Technische ontwikkelingen: Een GPS naderingshulpmiddel voor de kleine luchtvaart Christian Tiberius Faculteit Luchtvaart- en Ruimtevaarttechniek TU Delft WORKSHOP Is er nog Lucht(ruim) voor de Kleine Luchtvaart
INFRARED-THE REAL FUTURE PROOF ITS COMMUNICATION MEDIUM
 INFRARED-THE REAL FUTURE PROOF ITS COMMUNICATION MEDIUM Max Staudinger Director Marketing/Sales Efkon Austria, Andritzer Reichsstrasse 66 8045 Graz, Austria 1. The Basic Achievement Efkon electronics has
INFRARED-THE REAL FUTURE PROOF ITS COMMUNICATION MEDIUM Max Staudinger Director Marketing/Sales Efkon Austria, Andritzer Reichsstrasse 66 8045 Graz, Austria 1. The Basic Achievement Efkon electronics has
On the Road to Driverless. Personal cars and commercial trucks are. Differential GNSS+INS for Land Vehicle Autonomous Navigation Qualification
 » COVER STORY MERCEDES vision of future mobility, autonomous driving. On the Road to Driverless Differential GNSS+INS for Land Vehicle Autonomous Navigation Qualification Land-vehicle autonomous navigation
» COVER STORY MERCEDES vision of future mobility, autonomous driving. On the Road to Driverless Differential GNSS+INS for Land Vehicle Autonomous Navigation Qualification Land-vehicle autonomous navigation
Click to edit Master title style
 Knowledge Transfer Networks Francis Tuffy Knowledge Network Director, National Physical Laboratory. The New Knowledge Transfer Networks. Time and Frequency/ Location KTN Meeting. 9th February 2006. Preview
Knowledge Transfer Networks Francis Tuffy Knowledge Network Director, National Physical Laboratory. The New Knowledge Transfer Networks. Time and Frequency/ Location KTN Meeting. 9th February 2006. Preview
Shared Use of DGPS for DP and Survey Operations
 Gabriel Delgado-Saldivar The Use of DP-Assisted FPSOs for Offshore Well Testing Services DYNAMIC POSITIONING CONFERENCE October 17-18, 2006 Sensors Shared Use of DGPS for Dr. David Russell Subsea 7, Scotland
Gabriel Delgado-Saldivar The Use of DP-Assisted FPSOs for Offshore Well Testing Services DYNAMIC POSITIONING CONFERENCE October 17-18, 2006 Sensors Shared Use of DGPS for Dr. David Russell Subsea 7, Scotland
RECENT DEVELOPMENTS IN EMERGENCY VEHICLE TRAFFIC SIGNAL PREEMPTION AND COLLISION AVOIDANCE TECHNOLOGIES. Purdue Road School 2017 Dave Gross
 RECENT DEVELOPMENTS IN EMERGENCY VEHICLE TRAFFIC SIGNAL PREEMPTION AND COLLISION AVOIDANCE TECHNOLOGIES Purdue Road School 2017 Dave Gross Preemption Technology Platform types Acoustic Optical GPS Radio
RECENT DEVELOPMENTS IN EMERGENCY VEHICLE TRAFFIC SIGNAL PREEMPTION AND COLLISION AVOIDANCE TECHNOLOGIES Purdue Road School 2017 Dave Gross Preemption Technology Platform types Acoustic Optical GPS Radio
Results of public consultation ITS
 Results of public consultation ITS 1. Introduction A public consultation (survey) was carried out between 29 February and 31 March 2008 on the preparation of the Action Plan on Intelligent Transport Systems
Results of public consultation ITS 1. Introduction A public consultation (survey) was carried out between 29 February and 31 March 2008 on the preparation of the Action Plan on Intelligent Transport Systems
Radio Navigation Laboratory (TOS-ETL) European Space Agency (ESA)
 European Space Agency (ESA)") Radio Navigation Laboratory (TOS-ETL) European Space Agency (ESA) Simon Johns (ESA) Michel Tossaint (ESA) Receiver Technical Workshop 3 rd July 2003 Paris 09/07/2003 1 Objectives of the Navigation Laboratory
Radio Navigation Laboratory (TOS-ETL) European Space Agency (ESA) Simon Johns (ESA) Michel Tossaint (ESA) Receiver Technical Workshop 3 rd July 2003 Paris 09/07/2003 1 Objectives of the Navigation Laboratory
Mobile Positioning in Wireless Mobile Networks
 Mobile Positioning in Wireless Mobile Networks Peter Brída Department of Telecommunications and Multimedia Faculty of Electrical Engineering University of Žilina SLOVAKIA Outline Why Mobile Positioning?
Mobile Positioning in Wireless Mobile Networks Peter Brída Department of Telecommunications and Multimedia Faculty of Electrical Engineering University of Žilina SLOVAKIA Outline Why Mobile Positioning?
Getting Through the Green: Smarter Traffic Management with Adaptive Signal Control
 Getting Through the Green: Smarter Traffic Management with Adaptive Signal Control Presented by: C. William (Bill) Kingsland, Assistant Commissioner, Transportation Systems Management Outline 1. What is
Getting Through the Green: Smarter Traffic Management with Adaptive Signal Control Presented by: C. William (Bill) Kingsland, Assistant Commissioner, Transportation Systems Management Outline 1. What is
and Vehicle Sensors in Urban Environment
 AvailabilityImprovement ofrtk GPS GPSwithIMU and Vehicle Sensors in Urban Environment ION GPS/GNSS 2012 Tk Tokyo University it of Marine Si Science and Technology Nobuaki Kubo, Chen Dihan 1 Contents Background
AvailabilityImprovement ofrtk GPS GPSwithIMU and Vehicle Sensors in Urban Environment ION GPS/GNSS 2012 Tk Tokyo University it of Marine Si Science and Technology Nobuaki Kubo, Chen Dihan 1 Contents Background
Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications
 Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications AASHTO GIS-T Symposium April 2012 Table Of Contents Connected Vehicle Program Goals Mapping Technology
Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications AASHTO GIS-T Symposium April 2012 Table Of Contents Connected Vehicle Program Goals Mapping Technology
European Satellite Navigation Competition The DLR Special Topic Prize NEXT GENERATION NAVIGATION. Folie 1
 European Satellite Navigation Competition 2010 The DLR Special Topic Prize NEXT GENERATION NAVIGATION Folie 1 Robert Klarner, DLR Technology Marketing, 01/05/2009 DLR German Aerospace Center Research Institution
European Satellite Navigation Competition 2010 The DLR Special Topic Prize NEXT GENERATION NAVIGATION Folie 1 Robert Klarner, DLR Technology Marketing, 01/05/2009 DLR German Aerospace Center Research Institution
Comparison of Simulation-Based Dynamic Traffic Assignment Approaches for Planning and Operations Management
 Comparison of Simulation-Based Dynamic Traffic Assignment Approaches for Planning and Operations Management Ramachandran Balakrishna Daniel Morgan Qi Yang Howard Slavin Caliper Corporation 4 th TRB Conference
Comparison of Simulation-Based Dynamic Traffic Assignment Approaches for Planning and Operations Management Ramachandran Balakrishna Daniel Morgan Qi Yang Howard Slavin Caliper Corporation 4 th TRB Conference
WOLF - Wireless robust Link for urban Forces operations
 Executive summary - rev B - 01/05/2011 WOLF - Wireless robust Link for urban Forces operations The WOLF project, funded under the 2nd call for proposals of Joint Investment Program on Force Protection
Executive summary - rev B - 01/05/2011 WOLF - Wireless robust Link for urban Forces operations The WOLF project, funded under the 2nd call for proposals of Joint Investment Program on Force Protection
Dependability of GNSS on the UK Railways
 Dependability of GNSS on the UK Railways M. Thomas 1, D. Lowe 2, M. Dumville 2, W. Roberts 2, P. Cross 3, G. Roberts 4, T. Nunn 5 1 Rail Safety and Standards Board, London, UK, 2 Nottingham Scientific
Dependability of GNSS on the UK Railways M. Thomas 1, D. Lowe 2, M. Dumville 2, W. Roberts 2, P. Cross 3, G. Roberts 4, T. Nunn 5 1 Rail Safety and Standards Board, London, UK, 2 Nottingham Scientific
EGNOS2road. Summary Report. ex TREN/G4/ SI Classification: Summary Report Page 1 of 55
 EGNOS2road Summary Report Contract: Classification: ex TREN/G4/41-2010- SI2.573856 Public Summary Report Page 1 of 55 Table of Contents 1 INTRODUCTION... 5 1.1 Abbreviations... 5 1.2 Contacts... 7 1.3
EGNOS2road Summary Report Contract: Classification: ex TREN/G4/41-2010- SI2.573856 Public Summary Report Page 1 of 55 Table of Contents 1 INTRODUCTION... 5 1.1 Abbreviations... 5 1.2 Contacts... 7 1.3
A FAMILY OF SOLUTIONS BASED ON THE srx-10, A SW DEFINED MULTICONSTELLATION GNSS RECEIVER
 ION GNSS+ 2014, Session A5 A FAMILY OF SOLUTIONS BASED ON THE srx-10, A SW DEFINED MULTICONSTELLATION GNSS RECEIVER Teresa Ferreira, Manuel Toledo, José María López, GMV Property of GMV All rights reserved
ION GNSS+ 2014, Session A5 A FAMILY OF SOLUTIONS BASED ON THE srx-10, A SW DEFINED MULTICONSTELLATION GNSS RECEIVER Teresa Ferreira, Manuel Toledo, José María López, GMV Property of GMV All rights reserved
Cooperative localization (part I) Jouni Rantakokko
 Jouni Rantakokko") Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
IZT S1000 / IZT S1010 Testing ecall Systems
 IZT S1000 / IZT S1010 Testing ecall Systems Application Note Ready for the 2018 ecall standards Preinstalled scenarios for various testing Self-defined scenarios for special tests ecall and Adjacent Band
IZT S1000 / IZT S1010 Testing ecall Systems Application Note Ready for the 2018 ecall standards Preinstalled scenarios for various testing Self-defined scenarios for special tests ecall and Adjacent Band
Background: Cellular network technology
 Background: Cellular network technology Overview 1G: Analog voice (no global standard ) 2G: Digital voice (again GSM vs. CDMA) 3G: Digital voice and data Again... UMTS (WCDMA) vs. CDMA2000 (both CDMA-based)
Background: Cellular network technology Overview 1G: Analog voice (no global standard ) 2G: Digital voice (again GSM vs. CDMA) 3G: Digital voice and data Again... UMTS (WCDMA) vs. CDMA2000 (both CDMA-based)
Long Term Evolution (LTE) Radio Network Planning Using Atoll
 Radio Network Planning Using Atoll") Long Term Evolution (LTE) Radio Network Planning Using Atoll Gullipalli S.D. Rohit Gagan, Kondamuri N. Nikhitha, Electronics and Communication Department, Baba Institute of Technology and Sciences - Vizag
Long Term Evolution (LTE) Radio Network Planning Using Atoll Gullipalli S.D. Rohit Gagan, Kondamuri N. Nikhitha, Electronics and Communication Department, Baba Institute of Technology and Sciences - Vizag
ITS Radiocommunications in Japan Progress report and future directions
 ITS Radiocommunications in Japan Progress report and future directions 6 March 2018 Berlin, Germany Tomoaki Ishii Assistant Director, New-Generation Mobile Communications Office, Radio Dept., Telecommunications
ITS Radiocommunications in Japan Progress report and future directions 6 March 2018 Berlin, Germany Tomoaki Ishii Assistant Director, New-Generation Mobile Communications Office, Radio Dept., Telecommunications
The International Scene: How Precise Positioning Will Underpin Critical GNSS Applications
 The International Scene: How Precise Positioning Will Underpin Critical GNSS Applications School of Civil & Environmental Engineering, UNSW, Sydney, Australia Chris Rizos Member of the IGS Governing Board
The International Scene: How Precise Positioning Will Underpin Critical GNSS Applications School of Civil & Environmental Engineering, UNSW, Sydney, Australia Chris Rizos Member of the IGS Governing Board
Programmable Wireless Networking Overview
 Programmable Wireless Networking Overview Dr. Joseph B. Evans Program Director Computer and Network Systems Computer & Information Science & Engineering National Science Foundation NSF Programmable Wireless
Programmable Wireless Networking Overview Dr. Joseph B. Evans Program Director Computer and Network Systems Computer & Information Science & Engineering National Science Foundation NSF Programmable Wireless
European GNSS Applications in H2020
 European GNSS Applications in H2020 Countdown to H2020 12.12.2013, Brussels Carmen Aguilera European GNSS Agency Agenda European GNSS Agency EU-GNSS market potential FP7- experience and results H2020 opportunities
European GNSS Applications in H2020 Countdown to H2020 12.12.2013, Brussels Carmen Aguilera European GNSS Agency Agenda European GNSS Agency EU-GNSS market potential FP7- experience and results H2020 opportunities
MAGICGNSS RTCM-BASED SERVICE, A LEAP FORWARD TOWARDS MULTI- GNSS HIGH ACCURACY REAL-TIME PROCESSING
 ION GNSS 2015 MAGICGNSS RTCM-BASED SERVICE, A LEAP FORWARD TOWARDS MULTI- GNSS HIGH ACCURACY REAL-TIME PROCESSING SEPTEMBER 16 TH, 2015 - ION GNSS 2015, TAMPA, FLORIDA, USA SESSION E2A: NEXT GENERATION
ION GNSS 2015 MAGICGNSS RTCM-BASED SERVICE, A LEAP FORWARD TOWARDS MULTI- GNSS HIGH ACCURACY REAL-TIME PROCESSING SEPTEMBER 16 TH, 2015 - ION GNSS 2015, TAMPA, FLORIDA, USA SESSION E2A: NEXT GENERATION
Addressable Radios for Emergency Alert (AREA): WorldSpace Satellite Radio
: WorldSpace Satellite Radio") Addressable Radios for Emergency Alert (AREA): A WorldSpace solution for effective delivery of alerts S.Rangarajan, Jerome Soumagne and Jean-Luc Vignaud WorldSpace Satellite Radio srangarajan@worldspace.com,
Addressable Radios for Emergency Alert (AREA): A WorldSpace solution for effective delivery of alerts S.Rangarajan, Jerome Soumagne and Jean-Luc Vignaud WorldSpace Satellite Radio srangarajan@worldspace.com,
Hybridation and Fusion of Satellite and Telecommunication Network Based Positioning Methods. F. CASTANIE IRIT/INP-ENSEEIHT
 Hybridation and Fusion of Satellite and Telecommunication Network Based Positioning Methods F. CASTANIE IRIT/INP-ENSEEIHT www.irit.fr Contents 1. Browsing over the satellite Navigation Systems: 1.1 Basic
Hybridation and Fusion of Satellite and Telecommunication Network Based Positioning Methods F. CASTANIE IRIT/INP-ENSEEIHT www.irit.fr Contents 1. Browsing over the satellite Navigation Systems: 1.1 Basic
Characteristics of the Land Mobile Navigation Channel for Pedestrian Applications
 Characteristics of the Land Mobile Navigation Channel for Pedestrian Applications Andreas Lehner German Aerospace Center Münchnerstraße 20 D-82230 Weßling, Germany andreas.lehner@dlr.de Co-Authors: Alexander
Characteristics of the Land Mobile Navigation Channel for Pedestrian Applications Andreas Lehner German Aerospace Center Münchnerstraße 20 D-82230 Weßling, Germany andreas.lehner@dlr.de Co-Authors: Alexander
HIGHTS: towards sub-meter positioning accuracy in vehicular networks. Jérôme Härri (EURECOM) on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018
 on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018") HIGHTS: towards sub-meter positioning accuracy in vehicular networks Jérôme Härri (EURECOM) on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018 The HIGHTS Consortium 09.03.2018 H2020 HIGHTS Project 2
HIGHTS: towards sub-meter positioning accuracy in vehicular networks Jérôme Härri (EURECOM) on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018 The HIGHTS Consortium 09.03.2018 H2020 HIGHTS Project 2
SPACE APPLI 2012 EGNOS2ROAD: assessing benefits for road applications
 SPACE APPLI 2012 EGNOS2ROAD: assessing benefits for road applications Fiammetta Diani Market Development Officer European GNSS Agency Rue de la Loi 56 B-1049 Brussels (Belgium) Philippe Hamet Policy officer
SPACE APPLI 2012 EGNOS2ROAD: assessing benefits for road applications Fiammetta Diani Market Development Officer European GNSS Agency Rue de la Loi 56 B-1049 Brussels (Belgium) Philippe Hamet Policy officer
Greek Maritime trials
 Greek Maritime trials Liza Panagiotopoulou KTIMATOLOGIO S.A. Greek Maritime trials took place in the framework of GALILEO Future Applications GALA (Galileo Overall Architecture Definition) Work Package
Greek Maritime trials Liza Panagiotopoulou KTIMATOLOGIO S.A. Greek Maritime trials took place in the framework of GALILEO Future Applications GALA (Galileo Overall Architecture Definition) Work Package
E-CALL. Traffic information systems L E C T U R E. Zuzana Bělinová. TELEMATIC SYSTEMS AND THEIR DESIGN part Systems Lecture 9
 Zuzana Bělinová L E C T U R E 9 E-CALL Traffic information systems Lecture 6 - overview E-call Traffic information systems RDS-TMC TPEG Zuzana Bělinová E-CALL what it is Automatic emergency call from vehicles
Zuzana Bělinová L E C T U R E 9 E-CALL Traffic information systems Lecture 6 - overview E-call Traffic information systems RDS-TMC TPEG Zuzana Bělinová E-CALL what it is Automatic emergency call from vehicles
Nigerian Communications Satellite Ltd. (NIGCOMSAT)
") OVERVIEW OF NIGERIAN SATELLITE AUGMENTATION SYSTEM COMMENCING WITH PILOT DEMONSTRATION TO VALIDATE NATIONAL WORK PLAN presented by Dr. Lawal Lasisi Salami, NIGERIAN COMMUNICATIONS SATELLITE LTD UNDER FEDERAL
OVERVIEW OF NIGERIAN SATELLITE AUGMENTATION SYSTEM COMMENCING WITH PILOT DEMONSTRATION TO VALIDATE NATIONAL WORK PLAN presented by Dr. Lawal Lasisi Salami, NIGERIAN COMMUNICATIONS SATELLITE LTD UNDER FEDERAL
Bluetooth Low Energy Sensing Technology for Proximity Construction Applications
 Bluetooth Low Energy Sensing Technology for Proximity Construction Applications JeeWoong Park School of Civil and Environmental Engineering, Georgia Institute of Technology, 790 Atlantic Dr. N.W., Atlanta,
Bluetooth Low Energy Sensing Technology for Proximity Construction Applications JeeWoong Park School of Civil and Environmental Engineering, Georgia Institute of Technology, 790 Atlantic Dr. N.W., Atlanta,
The EDA SUM Project. Surveillance in an Urban environment using Mobile sensors. 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012
 Surveillance in an Urban environment using Mobile sensors 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012 TABLE OF CONTENTS European Defence Agency Supported Project 1. SUM Project Description. 2. Subsystems
Surveillance in an Urban environment using Mobile sensors 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012 TABLE OF CONTENTS European Defence Agency Supported Project 1. SUM Project Description. 2. Subsystems
2 nd Mileage-Based User Fee Symposium. Transition Issues and Research Needs. Paul Sorensen, RAND Corporation
 2 nd Mileage-Based User Fee Symposium Transition Issues and Research Needs Paul Sorensen, RAND Corporation April 20-21, 2010 Observations Are Based on Two Recent AASHTO-funded NCHRP Studies NCHRP 20-24(69)
2 nd Mileage-Based User Fee Symposium Transition Issues and Research Needs Paul Sorensen, RAND Corporation April 20-21, 2010 Observations Are Based on Two Recent AASHTO-funded NCHRP Studies NCHRP 20-24(69)
Track side measuring system: prototype implementation Malching
 Track side measuring system: prototype implementation Malching 2007 - EUROPAC project partners 1 Introduction to EUROPAC EUROPAC is gathering major European railway stakeholders around a research project
Track side measuring system: prototype implementation Malching 2007 - EUROPAC project partners 1 Introduction to EUROPAC EUROPAC is gathering major European railway stakeholders around a research project
Knowledge-based Reconfiguration of Driving Styles for Intelligent Transport Systems
 Knowledge-based Reconfiguration of Driving Styles for Intelligent Transport Systems Lecturer, Informatics and Telematics department Harokopion University of Athens GREECE e-mail: gdimitra@hua.gr International
Knowledge-based Reconfiguration of Driving Styles for Intelligent Transport Systems Lecturer, Informatics and Telematics department Harokopion University of Athens GREECE e-mail: gdimitra@hua.gr International
EGNOS Operations Oper and T and heir T Planned Ev E olution v
 EGNOS Operations a Th P Evo EGNOS Laurent Gauthier, Javier Ventura-Traveset, Felix Toran Navigation Department, ESA Directorate of European Union and Industrial Programmes, Toulouse, France Chantal de
EGNOS Operations a Th P Evo EGNOS Laurent Gauthier, Javier Ventura-Traveset, Felix Toran Navigation Department, ESA Directorate of European Union and Industrial Programmes, Toulouse, France Chantal de
GLONASS Status and Modernization
 GLONASS Status and Modernization Ekaterina Oleynik Central Research Institute of Roscosmos Federal Space Agency United Nations/Latvia Workshop on the Applications of Global Navigation Satellite Systems
GLONASS Status and Modernization Ekaterina Oleynik Central Research Institute of Roscosmos Federal Space Agency United Nations/Latvia Workshop on the Applications of Global Navigation Satellite Systems
Intelligent driving TH« TNO I Innovation for live
 Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
MAPS & ENHANCED CONTENT
 MAPS & ENHANCED Delivering high quality maps to enterprise, government, automotive and consumer markets MAPS & SUPERIOR HOW SEAMLESS COVERAGE IS COMMUNITY DRIVEN THE FRESHEST MAP The heart of location
MAPS & ENHANCED Delivering high quality maps to enterprise, government, automotive and consumer markets MAPS & SUPERIOR HOW SEAMLESS COVERAGE IS COMMUNITY DRIVEN THE FRESHEST MAP The heart of location
ATLANS-C. mobile mapping position and orientation solution
 mobile mapping position and orientation solution mobile mapping position and orientation solution THE SMALLEST ATLANS-C is a high performance all-in-one position and orientation solution for both land
mobile mapping position and orientation solution mobile mapping position and orientation solution THE SMALLEST ATLANS-C is a high performance all-in-one position and orientation solution for both land
Radio Navigation Aids Flight Test Seminar
 Radio Navigation Aids Flight Test Seminar FLIGHT INSPECTION IN THE NEW MILLENNIUM Curt Keedy FAA Flight Inspection Policy and Standards Change, Challenge, and Opportunity CHANGES Global Positioning system
Radio Navigation Aids Flight Test Seminar FLIGHT INSPECTION IN THE NEW MILLENNIUM Curt Keedy FAA Flight Inspection Policy and Standards Change, Challenge, and Opportunity CHANGES Global Positioning system
International GNSS Monitoring & Assessment Service for OS (igmas) ICG September 2011, Tokyo, Japan
 ICG September 2011, Tokyo, Japan") Presentation on igmas FOR WORKING GROUP A International GNSS Monitoring & Assessment Service for OS (igmas) by Xurong Dong International Cooperation Research Centre, CSNO ICG 6 5 9 September 2011, Tokyo,
Presentation on igmas FOR WORKING GROUP A International GNSS Monitoring & Assessment Service for OS (igmas) by Xurong Dong International Cooperation Research Centre, CSNO ICG 6 5 9 September 2011, Tokyo,
Dimov Stojče Ilčev. CNS Systems
 Stratospheric Platform Systems (SPS) Presentation by: Dimov Stojče Ilčev Durban University of Technology (DUT) Space Science Centre (SSC) CNS Systems August 2011 SPS for Mobile CNS Applications Stratospheric
Stratospheric Platform Systems (SPS) Presentation by: Dimov Stojče Ilčev Durban University of Technology (DUT) Space Science Centre (SSC) CNS Systems August 2011 SPS for Mobile CNS Applications Stratospheric
NGA s Support for Positioning and Navigation
 NGA s Support for Positioning and Navigation PNT Symposium 6 November 2007 Barbara Wiley NATIONAL GEOSPATIAL-INTELLIGENCE AGENCY What is NGA and What Do We Do? National Geospatial-Intelligence Agency (NGA)
NGA s Support for Positioning and Navigation PNT Symposium 6 November 2007 Barbara Wiley NATIONAL GEOSPATIAL-INTELLIGENCE AGENCY What is NGA and What Do We Do? National Geospatial-Intelligence Agency (NGA)
Drive-by DTM. and Navigation at our university in cooperation
 Drive-by DTM GPS and GSM/GPRS Power Cost-Effective Terrain Modeling A data teletransmission system for quick and efficient creation of digital terrain models (DTMs) forms the backbone of experimental work
Drive-by DTM GPS and GSM/GPRS Power Cost-Effective Terrain Modeling A data teletransmission system for quick and efficient creation of digital terrain models (DTMs) forms the backbone of experimental work
Car-to-Car Communication by Martin Wunderlich Meysam Haddadi
 Car-to-Car Communication by Martin Wunderlich Meysam Haddadi Technology and Application 26.01.2006 Chair for Communication Technology (ComTec), Faculty of Electrical Engineering / Computer Science Overview
Car-to-Car Communication by Martin Wunderlich Meysam Haddadi Technology and Application 26.01.2006 Chair for Communication Technology (ComTec), Faculty of Electrical Engineering / Computer Science Overview
A Roadmap for Connected & Autonomous Vehicles. David Skipp Ford Motor Company
 A Roadmap for Connected & Autonomous Vehicles David Skipp Ford Motor Company ! Why does an Autonomous Vehicle need a roadmap? Where might the roadmap take us? What should we focus on next? Why does an
A Roadmap for Connected & Autonomous Vehicles David Skipp Ford Motor Company ! Why does an Autonomous Vehicle need a roadmap? Where might the roadmap take us? What should we focus on next? Why does an