The robot capable of understanding human-like instructions
|
|
|
- Barnaby Barnett
- 5 years ago
- Views:
Transcription



1 The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The robot capable of understanding human-like instructions

2 Contents of this Presentation Introduction Human robot interaction devices and methods investigated General topics: technologies, that are applicable in a variety of use cases Success stories: solutions for specific tasks that allow human-like instructions Summary 2



 Requires")

3 Common Robot Programming Online programming using the teach pendant Offline programming in virtual environments Requires training Requires experience Takes a lot of time on the robot (approx. 1 min / point) Requires training Requires experience Requires equipment Takes a lot of time Needs: Fast and intuitive Programming! 3
?")
?")
4 Outlines and Goals Use Case Analysis What data do we need? Interaction Devices How can this data be retrieved and conveyed (low-level)? Device Interface, Multimodal Interface How can the information be transferred? High Level Programming Methods How can the information be processed (high-level)? Success Stories Integration in Demonstrations 4



5 Use Case Analysis Use Cases Analysis of user scenarios and interaction methods Locksmith Schmidt Joiner Mohring Metal works Treffler Conducted SME visits: System integrator: Automazioni Industriali, Kine, Friul Robot Joiners workshop: Som, Mohring Locksmithery: Petry, Schmidt Other: K.Met, Europress, Treffler, SD GmbH, ZF-Lenksysteme, Suitable use cases Milling of wooden kitchen elements Sanding of wooden stair elements Marking sheet metal for punching Handling / Cooperation in ramp-up phase Welding and bending in small batch sizes 5








6 Overview on Methods and Devices Programming devices and methods in different areas have been investigated Multimodality: Tactile Verbal Visual Different Intelligence levels: Pure point to point teaching Integration of process know how High Level Programming Automatic Programming Investigation in test beds, integration in demonstrations 6


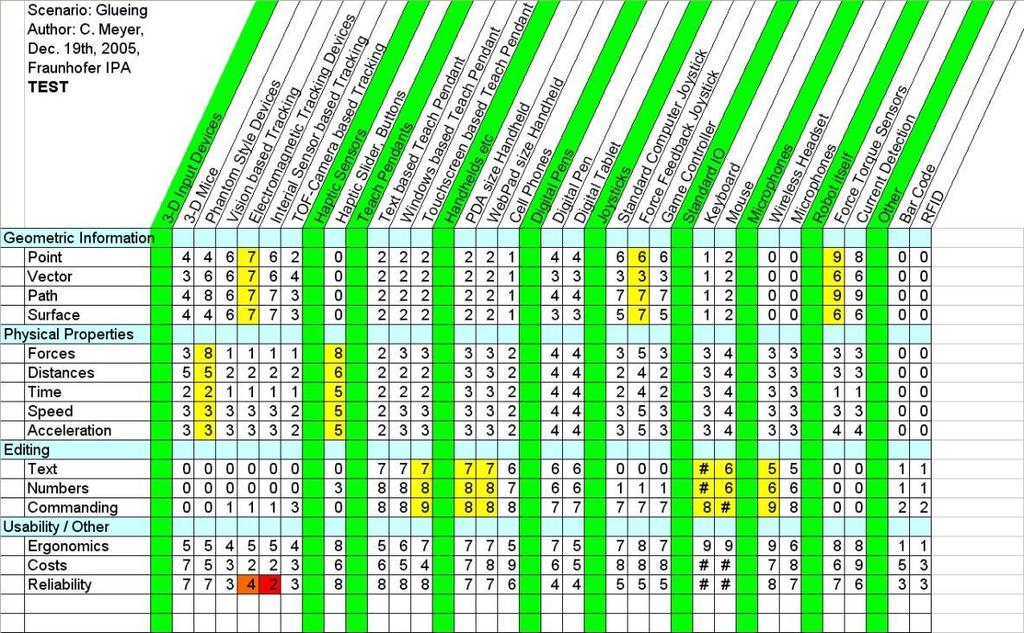


7 State of the Art: Survey and Assessment Rate and match interaction devices to use cases 7
8 State of the Art: Survey and Assessment Result: Five main requirements more intuitive definition of directions and orientations in 3D more intuitive definition of points, trajectories, surfaces and objects in 3D definition of process parameters, such as physical values, e.g., velocity or force need for small, wireless and hand-held devices that could be operated with one hand, e.g. PDAs command a robot without using hands and fingers 8
 Visual")

9 Evolution of Devices IPA InTeach IPA PDA Commercial HW Reis Flybook ADDF PDA Comau SafeGamePad Comau PDA KUKA 2D Visual servoing KUKA inertial jogging 1 Handed KUKA 3D (teach wand) Visual servoing KUKA new teach wand Anoto Pen KUKA Anoto Pen as teach wand ADDF Anoto Pen for CAD IPA Anoto Pen for Sketches IPA/ADDF speech interfaces Manual Guidance and Robot Handles (ABB, IPA, ) 9
10 Overview: General Topics Manual Guidance: Jogging the Robot Digital Pens: Understanding of Drawings Speech Interaction: Commanding the Robot High Level Programming: Abstract Task Specifications Ontologies: Understanding the Task 10
 Manual")


11 General Topics: Manual Guidance Distinction Low Level Force Control (ITIA CNR, COMAU, DLR) Manual Guidance (KUKA, ITIA, COMAU, ABB, IPA, ADDF) Programming by Demonstration (ITIA, ABB, KUKA, IPA, AAF) Results: Set up of test beds and demonstrators Interaction with safety aspects e.g. in collision situations 11


12 General Topics: Speech Interaction (1/2) What has to be done? Intuitive, hands-free communication Flexible set of commands that can be changed without hardware reconfiguration Main problems? Robustness, high recognition rate High noise level Direct effect no long processing Approach? Use of existing speech recognizers Definition of a benchmarking process Integration of different microphone types to achieve better signal to noise ratio 12
 Benchmark")





13 General Topics: Speech Interaction (2/2) Benchmark Tool has been developed Preparation of comparable test data Evaluation methods Throat microphone > 90% background noise cancellation Algorithms for mapping the frequency content of the throat microphone to standard speech signals Demonstrator Integration D1 (based on Microsoft SAPI) D3 and D4 (based on Sphinx4 framework) 13
 Ontolog Produc t data Process data Configu a ble part Rule s and modality-specific constraints XML appconf")
14 Ontologies for Custom Programming Input: AppConf from ontology Intermediate: Transformations use an XSLT stylesheet, afterwards eps with interaction. Based on Apache FOP. Output: Visual layout and interaction as Anoto-Doc Web surface Voice XML (using TellMe) Ontolog Produc t data Process data Configu a ble part Rule s and modality-specific constraints XML appconf E-form Anoto P Gestures User inter action Val ues Produc t data and proces execution Sensor Noncong urable part Spoken dialogue (Voic exml/sa 14
15 Overview: Success Stories Robot Programming for Everyone Intuitive Programming for Welding Tasks Teach Wand: Camera based Programming Touch Screen Based Programming in a Joiners Workshop High Level Programming 15

16 Success Story: Robot Programming for Everyone Lead-Through Programming Server Today s robot programming techniques are to time consuming to enable robots to finish low quantities of castings A new robot programming concept was developed at ABB that enables robot programming by manual guiding enables speech communication offers an adjustable instruction set according to the tasks and personal needs enables integration of Plug n Produce * devices *Plug n Produce will be abbreviated by PnP in the following 16


17 Success Story: Robot Programming for Everyone - PnP A simplified robot programming system has to include external devices Integration of XIRP-protocol for PnP functionality into Lead-Through Programming System Automatic Device-discovery Server provides PnP services to operators automatically Direct integration of PnP into final robot program XIRP-protocol implemented on cheap microcontroller as server for simple external devices Grippers Cameras Sensors External devices in robot applications 17


18 Success Story: Robot Programming for Everyone - Safety Based on a risk analysis a special handling device was developed for safe Lead-Through Programming Six integrated acknowledge switches enable continuous guiding with regrasping 18




19 Success Story: Robot Programming for Everyone Graphical visualization of instruction sequence Lead-Through Programming System Server generates robot programs in native robot language automatically No manual writing of code needed 19




20 Success Story: Robot Programming for Everyone - Demo Candy feeder with PnP functionality Demo set up at the Automatica 2008 fair 20

21 Success Story: Intuitive Programming for Welding Tasks at the Treffler Workplace (1/4) Introduction Application: MAG arc welding of small lot size work pieces End User: Treffler Maschinenbau, a SME in the area of Augsburg, Germany. Contract manufacturing of welding products, approx. 70 workers. Devices and Methods: Programming by Demonstration Guiding the robot using a Force Torque Sensor Path recording and post processing Guiding tool 21

22 Success Story: Intuitive Programming for Welding Tasks at the Treffler Workplace (2/4) Design Criteria Low interfering contour Guiding in a natural way Functionality Safety: emergency stop, three stage button, collision switch Functionality: force torque sensor, record button, laser scanner Evolution Three versions made of aluminium profiles and SLS, iterated with comments from Treffler 22

23 Success Story: Intuitive Programming for Welding Tasks at the Treffler Workplace (3/4) Guiding Admittance control for manual guidance Moving the table with the same interface Programming Trajectory compression using intelligent algorithms or simple interfaces Assigning welding parameters using simple interfaces or learning algorithms Adaption of process parameters using a 3-D interface Increasing the path accuracy using local sensor data (douglas-peucker, regiongrowth algorithms) 23





24 Success Story: Intuitive Programming for Welding Tasks at the Treffler Workplace (4/4) Result 1: Reduction of programming time for less experienced people up to 50% Result 2: Only small reduction for experienced robot programmer Result 3: Programming the robot for process experts is possible after a short training (<2 h) 24




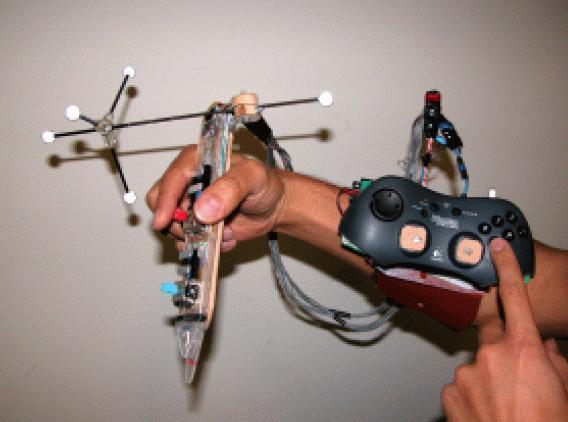
25 Success Story: KUKA Teach Wand PDA Teach Wand Camera Teach Wand Ball Joint Enabling Switch + PDA integration + cheaper tracking system + enabling switch + flexible mounting for pointing device + lightweight pointing device + form of a welding torch + new design for LEDs 25






26 Success Story: Smart worker interface for the teach wand Definition of Motions for Welding Seams, Approach Movements and movement Parameters Online Feedback of Robot Pose, online correction of orientation and translation 26







![and correction [min] 20 23](/docs-images/89/99436514/images/27-12.jpg "Duration complete [min]")
27 Success Story: Smart worker interface for the teach wand Some Screenshots of the PDA screen while programming a weld seam Programming Time for one trial run: Criteria KCP Teach Wand # of viapoints # of welding points # of welding seams Seam length [mm] Duration of the teaching [min] Duration test and correction [min] Duration complete [min] # of points complete

28 Success Story: Smart worker interface for the teach wand 28
 At Schreinerei Som: Full demonstrator At Fraunhofer IPA: Reduced version to demonstrate a subset of")
29 Success Story: Touchscreen based Programming in a Joiners Workshop (1/4) Final status of D4 demonstrator cell (30 Jan 2009) At Schreinerei Som: Full demonstrator At Fraunhofer IPA: Reduced version to demonstrate a subset of functionalities 29



30 Success Story: Touchscreen based Programming in a Joiners Workshop (2/4) Integration and evaluation of a graphics based user input device Flybook Results / future use: Flybook is used in the development phase of a new teach pendant generation Evaluation of a standard PDA as user input device MDA compact Results / future use: PDA not suitable as real input device for geometry adaption PDA can be used offline to generate sketches to be processed by the Sketch Editor 30



31 Success Story: Touchscreen based Programming in a Joiners Workshop (3/4) User interfaces for milling, drilling and spraying Exemplary screen shots Drilling Milling Spraying 31
")

")
32 Success Story: Touchscreen based Programming in a Joiners Workshop (4/4) User interface of Sketch Editor Exemplary screenshot Time Comparison Milling of a free form table: Manual: 30 min (including template preparation) Woodworking Ass.: 8 min 32
 commands SOA services Model-based Automatic robot program generation Collision avoidance")
33 Success Story: High Level Programming (1/3) Automatic High Level Programming Workflow control High-level programming (HLP) commands SOA services Model-based Automatic robot program generation Collision avoidance 33
 Interactive")


34 Success Story: High Level Programming (2/3) Interactive High Level Programming Set up of robot cell Interactive defintion of surfaces Generation of robot path Interactive adjustment of robot path 34
35 Success Story: High Level Programming (3/3) 35

36 Summary, Formal Aspects, Outlook Impact: Many devices and methods for humanlike instructing of robots have been developed. They were integrated in the four Demonstration scenarios and also many other testbeds Improvements towards the SMErobot goals: Reduction of programming time: up to 58% when programming manual, >90% for automatic programming Simplicity of use: simple, easy to understand interfaces Safe operation: permitted Scientific Impact: Publications, conferences, fairs But, most important: Set ups at the end user sites! 36

37 Thank you for your attention! 37
The safe & productive robot working without fences
 The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
ROBOTICS, Jump to the next generation
 ROBOTICS, Jump to the next generation Erich Lohrmann Area Director Latin America KUKA Roboter GmbH COPY RIGHTS by Erich Lohrmann Human Evolution Robotic Evolution (by KUKA) International Conference on
ROBOTICS, Jump to the next generation Erich Lohrmann Area Director Latin America KUKA Roboter GmbH COPY RIGHTS by Erich Lohrmann Human Evolution Robotic Evolution (by KUKA) International Conference on
Introduction to Robotics in CIM Systems
 Introduction to Robotics in CIM Systems Fifth Edition James A. Rehg The Pennsylvania State University Altoona, Pennsylvania Prentice Hall Upper Saddle River, New Jersey Columbus, Ohio Contents Introduction
Introduction to Robotics in CIM Systems Fifth Edition James A. Rehg The Pennsylvania State University Altoona, Pennsylvania Prentice Hall Upper Saddle River, New Jersey Columbus, Ohio Contents Introduction
Advances in Human!!!!! Computer Interaction
 Advances in Human!!!!! Computer Interaction Seminar WS 07/08 - AI Group, Chair Prof. Wahlster Patrick Gebhard gebhard@dfki.de Michael Kipp kipp@dfki.de Martin Rumpler rumpler@dfki.de Michael Schmitz schmitz@cs.uni-sb.de
Advances in Human!!!!! Computer Interaction Seminar WS 07/08 - AI Group, Chair Prof. Wahlster Patrick Gebhard gebhard@dfki.de Michael Kipp kipp@dfki.de Martin Rumpler rumpler@dfki.de Michael Schmitz schmitz@cs.uni-sb.de
User-Friendly Task Creation Using a CAD Integrated Robotic System on a Real Workcell
 User-Friendly Task Creation Using a CAD Integrated Robotic System on a Real Workcell Alireza Changizi, Arash Rezaei, Jamal Muhammad, Jyrki Latokartano, Minna Lanz International Science Index, Industrial
User-Friendly Task Creation Using a CAD Integrated Robotic System on a Real Workcell Alireza Changizi, Arash Rezaei, Jamal Muhammad, Jyrki Latokartano, Minna Lanz International Science Index, Industrial
Trust and Interaction in Industrial Human-Robot Collaborative applications
 Trust and Interaction in Industrial Human-Robot Collaborative applications Iñaki Maurtua IK4-TEKNIKER This project has received funding from the European Union s Horizon 2020 research and innovation programme
Trust and Interaction in Industrial Human-Robot Collaborative applications Iñaki Maurtua IK4-TEKNIKER This project has received funding from the European Union s Horizon 2020 research and innovation programme
OmniWin 2015 Professional Designing and Nesting
 OmniWin 2015 Professional Designing and Nesting OmniWin 2015 is a simple, clear and fast designing and nesting software, which adapts intelligently to your machine and your cutting needs. It takes over
OmniWin 2015 Professional Designing and Nesting OmniWin 2015 is a simple, clear and fast designing and nesting software, which adapts intelligently to your machine and your cutting needs. It takes over
WRS Partner Robot Challenge (Virtual Space) is the World's first competition played under the cyber-physical environment.
 is the World's first competition played under the cyber-physical environment.") WRS Partner Robot Challenge (Virtual Space) 2018 WRS Partner Robot Challenge (Virtual Space) is the World's first competition played under the cyber-physical environment. 1 Introduction The Partner Robot
WRS Partner Robot Challenge (Virtual Space) 2018 WRS Partner Robot Challenge (Virtual Space) is the World's first competition played under the cyber-physical environment. 1 Introduction The Partner Robot
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Human-robotic cooperation In the light of Industry 4.0
 Human-robotic cooperation In the light of Industry 4.0 Central European cooperation for Industry 4.0 workshop Dr. Erdős Ferenc Gábor Engineering and Management Intelligence Laboratoty (EMI) Institute for
Human-robotic cooperation In the light of Industry 4.0 Central European cooperation for Industry 4.0 workshop Dr. Erdős Ferenc Gábor Engineering and Management Intelligence Laboratoty (EMI) Institute for
TECNALIA. Robotics for Advanced Manufacturing. ROBOTT-NET Robotizar Consideraciones a tener en cuenta antes de empezar
 TECNALIA Robotics for Advanced Manufacturing ROBOTT-NET Robotizar Consideraciones a tener en cuenta antes de empezar Damien SALLÉ damien.salle@tecnalia.com Today s reality: The automated production line
TECNALIA Robotics for Advanced Manufacturing ROBOTT-NET Robotizar Consideraciones a tener en cuenta antes de empezar Damien SALLÉ damien.salle@tecnalia.com Today s reality: The automated production line
More Info at Open Access Database by S. Dutta and T. Schmidt
 More Info at Open Access Database www.ndt.net/?id=17657 New concept for higher Robot position accuracy during thermography measurement to be implemented with the existing prototype automated thermography
More Info at Open Access Database www.ndt.net/?id=17657 New concept for higher Robot position accuracy during thermography measurement to be implemented with the existing prototype automated thermography
from the coworker scenario to the cognitive factory scenario
 New developments on Industrial Robotics from the coworker scenario to the cognitive factory scenario Download: http://robotics.dem.uc.pt/norberto/comimsa2008.pdf J. Norberto Pires Departamento de Engenharia
New developments on Industrial Robotics from the coworker scenario to the cognitive factory scenario Download: http://robotics.dem.uc.pt/norberto/comimsa2008.pdf J. Norberto Pires Departamento de Engenharia
PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES
 Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
GCSE Engineering. Schemes of Work
 GCSE Engineering Schemes of Work GUIDANCE FOR SCHEME OF WORK Please find below guidance on and an example of a scheme of work that could be applied for the GCSE Engineering specification. As every centre
GCSE Engineering Schemes of Work GUIDANCE FOR SCHEME OF WORK Please find below guidance on and an example of a scheme of work that could be applied for the GCSE Engineering specification. As every centre
Cognitive Systems and Robotics: opportunities in FP7
 Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
BROCHURE. RM-RoboCut3D 6Kg CNC MACHINES INDUSTRIAL MACHINES ROBOTIC SYSTEM
 BROCHURE RM-RoboCut3D 6Kg CNC MACHINES INDUSTRIAL MACHINES ROBOTIC SYSTEM R M R O B O C U T 3 D 6 K g Robot educational solution for milling and Pick&Place www.ronchinimassimo.com ROBOT EDUCATIONAL SOLUTION
BROCHURE RM-RoboCut3D 6Kg CNC MACHINES INDUSTRIAL MACHINES ROBOTIC SYSTEM R M R O B O C U T 3 D 6 K g Robot educational solution for milling and Pick&Place www.ronchinimassimo.com ROBOT EDUCATIONAL SOLUTION
WORKSHOP. Industrieroboter als Bearbeitungsmaschinen
 WORKSHOP Industrieroboter als Bearbeitungsmaschinen 21 März 2014, Fraunhofer IPK, Berlin Fortgeschrittene Rgelungsverfahren für die Bearbeitung mit den Industrierobotern Dragoljub Surdilovic, Fraunhofer
WORKSHOP Industrieroboter als Bearbeitungsmaschinen 21 März 2014, Fraunhofer IPK, Berlin Fortgeschrittene Rgelungsverfahren für die Bearbeitung mit den Industrierobotern Dragoljub Surdilovic, Fraunhofer
EPCA Germany. Cutting Edge Technology. experience matters
 Cutting Machines EPCA Germany Cutting Edge Technology EPCA Germany stands for long year expertise, in-depth knowledge, excellent service quality and understanding of automation processes. With EPCA Germany
Cutting Machines EPCA Germany Cutting Edge Technology EPCA Germany stands for long year expertise, in-depth knowledge, excellent service quality and understanding of automation processes. With EPCA Germany
Advancements in Gesture Recognition Technology
 IOSR Journal of VLSI and Signal Processing (IOSR-JVSP) Volume 4, Issue 4, Ver. I (Jul-Aug. 2014), PP 01-07 e-issn: 2319 4200, p-issn No. : 2319 4197 Advancements in Gesture Recognition Technology 1 Poluka
IOSR Journal of VLSI and Signal Processing (IOSR-JVSP) Volume 4, Issue 4, Ver. I (Jul-Aug. 2014), PP 01-07 e-issn: 2319 4200, p-issn No. : 2319 4197 Advancements in Gesture Recognition Technology 1 Poluka
High-Level Programming for Industrial Robotics: using Gestures, Speech and Force Control
 High-Level Programming for Industrial Robotics: using Gestures, Speech and Force Control Pedro Neto, J. Norberto Pires, Member, IEEE Abstract Today, most industrial robots are programmed using the typical
High-Level Programming for Industrial Robotics: using Gestures, Speech and Force Control Pedro Neto, J. Norberto Pires, Member, IEEE Abstract Today, most industrial robots are programmed using the typical
UNIT VI. Current approaches to programming are classified as into two major categories:
 Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
QIROX Sensor systems. Top quality with each weld seam
 QIROX Sensor systems Top quality with each weld seam Precision work! Looking into space requires maximum optical precision. Just as your production processes with automated welding technology. Sensors
QIROX Sensor systems Top quality with each weld seam Precision work! Looking into space requires maximum optical precision. Just as your production processes with automated welding technology. Sensors
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM
 CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION. CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme
 VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme Fraunhofer IFF, Magdeburg 2016 VALERI - A collaborative mobile manipulator for
VALERI - A COLLABORATIVE MOBILE MANIPULATOR FOR AEROSPACE PRODUCTION CLAWAR 2016, London, UK Fraunhofer IFF Robotersysteme Fraunhofer IFF, Magdeburg 2016 VALERI - A collaborative mobile manipulator for
HRI overview. Industrial Robotics: Human Robot Interaction. Safety in commercial systems. Human-Robot Interaction. Robot Safety
 HRI overview Industrial Robotics: Human Robot Interaction Henrik I Christensen CSE @ UCSD Human-Robot Interaction Safety in commercial systems Robot Safety Robot Programming Application Packages Robot
HRI overview Industrial Robotics: Human Robot Interaction Henrik I Christensen CSE @ UCSD Human-Robot Interaction Safety in commercial systems Robot Safety Robot Programming Application Packages Robot
Technifutur. Maarten Daemen Sales Engineer / KUKA Automatisering + Robots NV KUKA LBR iiwa M. Daemen
 Technifutur Maarten Daemen Sales Engineer / KUKA Automatisering + Robots NV 2016-11-28 page: 1 ii invite you page: 2 LBR iiwa LBR stands for Leichtbauroboter (German for lightweight robot), iiwa for intelligent
Technifutur Maarten Daemen Sales Engineer / KUKA Automatisering + Robots NV 2016-11-28 page: 1 ii invite you page: 2 LBR iiwa LBR stands for Leichtbauroboter (German for lightweight robot), iiwa for intelligent
Multi-Modal User Interaction
 Multi-Modal User Interaction Lecture 4: Multiple Modalities Zheng-Hua Tan Department of Electronic Systems Aalborg University, Denmark zt@es.aau.dk MMUI, IV, Zheng-Hua Tan 1 Outline Multimodal interface
Multi-Modal User Interaction Lecture 4: Multiple Modalities Zheng-Hua Tan Department of Electronic Systems Aalborg University, Denmark zt@es.aau.dk MMUI, IV, Zheng-Hua Tan 1 Outline Multimodal interface
Advances in Robotics & Automation
 Advances in Robotics & Automation Advances in Robotics & Automation Bolmsjo, Adv Robot Autom 2014, 3:1 DOI: Review Article Open Access Reconfigurable and Flexible Industrial Robot Systems Gunnar Bolmsjo
Advances in Robotics & Automation Advances in Robotics & Automation Bolmsjo, Adv Robot Autom 2014, 3:1 DOI: Review Article Open Access Reconfigurable and Flexible Industrial Robot Systems Gunnar Bolmsjo
Towards Intuitive Industrial Human-Robot Collaboration
 Towards Intuitive Industrial Human-Robot Collaboration System Design and Future Directions Ferdinand Fuhrmann, Wolfgang Weiß, Lucas Paletta, Bernhard Reiterer, Andreas Schlotzhauer, Mathias Brandstötter
Towards Intuitive Industrial Human-Robot Collaboration System Design and Future Directions Ferdinand Fuhrmann, Wolfgang Weiß, Lucas Paletta, Bernhard Reiterer, Andreas Schlotzhauer, Mathias Brandstötter
2014 Market Trends Webinar Series
 Robotic Industries Association 2014 Market Trends Webinar Series Watch live or archived at no cost Learn about the latest innovations in robotics Sponsored by leading robotics companies 1 2014 Calendar
Robotic Industries Association 2014 Market Trends Webinar Series Watch live or archived at no cost Learn about the latest innovations in robotics Sponsored by leading robotics companies 1 2014 Calendar
Trade of Sheet Metalwork. Module 7: Introduction to CNC Sheet Metal Manufacturing Unit 2: CNC Machines Phase 2
 Trade of Sheet Metalwork Module 7: Introduction to CNC Sheet Metal Manufacturing Unit 2: CNC Machines Phase 2 Table of Contents List of Figures... 4 List of Tables... 5 Document Release History... 6 Module
Trade of Sheet Metalwork Module 7: Introduction to CNC Sheet Metal Manufacturing Unit 2: CNC Machines Phase 2 Table of Contents List of Figures... 4 List of Tables... 5 Document Release History... 6 Module
Available theses (October 2011) MERLIN Group
 MERLIN Group") Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
JEPPIAAR ENGINEERING COLLEGE
 JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
Sven Wachsmuth Bielefeld University
 & CITEC Central Lab Facilities Performance Assessment and System Design in Human Robot Interaction Sven Wachsmuth Bielefeld University May, 2011 & CITEC Central Lab Facilities What are the Flops of cognitive
& CITEC Central Lab Facilities Performance Assessment and System Design in Human Robot Interaction Sven Wachsmuth Bielefeld University May, 2011 & CITEC Central Lab Facilities What are the Flops of cognitive
What s hot right now and where is it heading?
 Collaborative Robotics in Industry 4.0 What s hot right now and where is it heading? THA Webinar 05.10.2017 Collaborative Robotics in Industry 4.0 Overview What is Human-Robot Collaboration? Common misconceptions
Collaborative Robotics in Industry 4.0 What s hot right now and where is it heading? THA Webinar 05.10.2017 Collaborative Robotics in Industry 4.0 Overview What is Human-Robot Collaboration? Common misconceptions
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE. Imagine Your Business...better. Automate Virtually Anything jhfoster.
 John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges
 ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges Dr. George Michalos University of Patras ROBOT FORUM ASSEMBLY 16 March 2016 Parma, Italy Introduction Human sensitivity
ROBO-PARTNER: Safe human-robot collaboration for assembly: case studies and challenges Dr. George Michalos University of Patras ROBOT FORUM ASSEMBLY 16 March 2016 Parma, Italy Introduction Human sensitivity
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Software update news about digital manufacturing tools and software
 s Software update news about digital manufacturing tools and software Chahe Bakmazjian Business Team Leader Hypertherm Robotic Software Laurent, Quebec, Canada www.robotmaster.com Programming Robots Gets
s Software update news about digital manufacturing tools and software Chahe Bakmazjian Business Team Leader Hypertherm Robotic Software Laurent, Quebec, Canada www.robotmaster.com Programming Robots Gets
ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything
 John Henry Foster ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 At John Henry Foster, we re devoted to bringing safe, flexible,
John Henry Foster ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 At John Henry Foster, we re devoted to bringing safe, flexible,
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
What was the first gestural interface?
 stanford hci group / cs247 Human-Computer Interaction Design Studio What was the first gestural interface? 15 January 2013 http://cs247.stanford.edu Theremin Myron Krueger 1 Myron Krueger There were things
stanford hci group / cs247 Human-Computer Interaction Design Studio What was the first gestural interface? 15 January 2013 http://cs247.stanford.edu Theremin Myron Krueger 1 Myron Krueger There were things
iwindow Concept of an intelligent window for machine tools using augmented reality
 iwindow Concept of an intelligent window for machine tools using augmented reality Sommer, P.; Atmosudiro, A.; Schlechtendahl, J.; Lechler, A.; Verl, A. Institute for Control Engineering of Machine Tools
iwindow Concept of an intelligent window for machine tools using augmented reality Sommer, P.; Atmosudiro, A.; Schlechtendahl, J.; Lechler, A.; Verl, A. Institute for Control Engineering of Machine Tools
Wire feeding systems for welding applications
 Wire feeding systems for welding applications The perfect drive package! u precise wire feeding u modern drive concept u fully digitalized process control u detailed monitoring u maximum production reliability
Wire feeding systems for welding applications The perfect drive package! u precise wire feeding u modern drive concept u fully digitalized process control u detailed monitoring u maximum production reliability
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping
 Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Robot Task-Level Programming Language and Simulation
 Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
APAS assistant. Product scope
 APAS assistant Product scope APAS assistant Table of contents Non-contact human-robot collaboration for the Smart Factory Robots have improved the working world in the past years in many ways. Above and
APAS assistant Product scope APAS assistant Table of contents Non-contact human-robot collaboration for the Smart Factory Robots have improved the working world in the past years in many ways. Above and
Robotics. In Textile Industry: Global Scenario
 Robotics In Textile Industry: A Global Scenario By: M.Parthiban & G.Mahaalingam Abstract Robotics In Textile Industry - A Global Scenario By: M.Parthiban & G.Mahaalingam, Faculty of Textiles,, SSM College
Robotics In Textile Industry: A Global Scenario By: M.Parthiban & G.Mahaalingam Abstract Robotics In Textile Industry - A Global Scenario By: M.Parthiban & G.Mahaalingam, Faculty of Textiles,, SSM College
Comau AURA - Advanced Use Robotic Arm AURA. Soft as a Human Touch
 AURA Soft as a Human Touch 2 The Culture of Automation Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
AURA Soft as a Human Touch 2 The Culture of Automation Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
AURA Soft as a Human Touch
 The Culture of Automation AURA Soft as a Human Touch Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
The Culture of Automation AURA Soft as a Human Touch Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
 UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
Project Multimodal FooBilliard
 Project Multimodal FooBilliard adding two multimodal user interfaces to an existing 3d billiard game Dominic Sina, Paul Frischknecht, Marian Briceag, Ulzhan Kakenova March May 2015, for Future User Interfaces
Project Multimodal FooBilliard adding two multimodal user interfaces to an existing 3d billiard game Dominic Sina, Paul Frischknecht, Marian Briceag, Ulzhan Kakenova March May 2015, for Future User Interfaces
OmniBevel 2017 Best-in-class technology for bevel cutting
 OmniBevel 2017 Best-in-class technology for bevel cutting OmniBevel 2017 is the professional software product for bevel cutting. It represents straight cuts, cylindrical holes, exact bevel angles and parts
OmniBevel 2017 Best-in-class technology for bevel cutting OmniBevel 2017 is the professional software product for bevel cutting. It represents straight cuts, cylindrical holes, exact bevel angles and parts
PicoTurn CNC. PicoTurn CNC. High-tech and suitable for training purposes. Mini CNC Lathe.
 Mini CNC Lathe High-tech and suitable for training purposes with advanced GPlus 450 CNC or Siemens 808 D control with autom. 4-station tool changer center width 550 mm Small CNC Machine for training as
Mini CNC Lathe High-tech and suitable for training purposes with advanced GPlus 450 CNC or Siemens 808 D control with autom. 4-station tool changer center width 550 mm Small CNC Machine for training as
A Multimodal Air Traffic Controller Working Position
 DLR.de Chart 1 A Multimodal Air Traffic Controller Working Position The Sixth SESAR Innovation Days, Delft, The Netherlands Oliver Ohneiser, Malte Jauer German Aerospace Center (DLR) Institute of Flight
DLR.de Chart 1 A Multimodal Air Traffic Controller Working Position The Sixth SESAR Innovation Days, Delft, The Netherlands Oliver Ohneiser, Malte Jauer German Aerospace Center (DLR) Institute of Flight
Special Patterns - Introduction. -Manufacture of large things -Technology Provider
 Special Patterns - Introduction -Manufacture of large things -Technology Provider Deny Tanuwidjaja (M.EngElectronics and Control Systems) 6 Years Robot programming 4 Years Control systems programming 5
Special Patterns - Introduction -Manufacture of large things -Technology Provider Deny Tanuwidjaja (M.EngElectronics and Control Systems) 6 Years Robot programming 4 Years Control systems programming 5
Development of Robotic Machine Tool Towards Industrial Business. Huapeng Wu, Heikki Handroos Lappeenranta University of Technology
 Development of Robotic Machine Tool Towards Industrial Business Huapeng Wu, Heikki Handroos Lappeenranta University of Technology 1. Background Since 2000, the EFDA in EU has launched several tasks to
Development of Robotic Machine Tool Towards Industrial Business Huapeng Wu, Heikki Handroos Lappeenranta University of Technology 1. Background Since 2000, the EFDA in EU has launched several tasks to
Multisensory Based Manipulation Architecture
 Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Kawasaki Robot. Dual-arm SCARA Robot "duaro"
 Kawasaki Robot Dual-arm SCARA Robot "duaro" The duaro Dual-arm SCARA Robot by Kawasaki Robotics: A Brand-new Offering that Realizes the Concept of an Innovative Dual-arm SCARA Robot Features: Low-power
Kawasaki Robot Dual-arm SCARA Robot "duaro" The duaro Dual-arm SCARA Robot by Kawasaki Robotics: A Brand-new Offering that Realizes the Concept of an Innovative Dual-arm SCARA Robot Features: Low-power
Multimodal Research at CPK, Aalborg
 Multimodal Research at CPK, Aalborg Summary: The IntelliMedia WorkBench ( Chameleon ) Campus Information System Multimodal Pool Trainer Displays, Dialogue Walkthru Speech Understanding Vision Processing
Multimodal Research at CPK, Aalborg Summary: The IntelliMedia WorkBench ( Chameleon ) Campus Information System Multimodal Pool Trainer Displays, Dialogue Walkthru Speech Understanding Vision Processing
MATLAB is a high-level programming language, extensively
 1 KUKA Sunrise Toolbox: Interfacing Collaborative Robots with MATLAB Mohammad Safeea and Pedro Neto Abstract Collaborative robots are increasingly present in our lives. The KUKA LBR iiwa equipped with
1 KUKA Sunrise Toolbox: Interfacing Collaborative Robots with MATLAB Mohammad Safeea and Pedro Neto Abstract Collaborative robots are increasingly present in our lives. The KUKA LBR iiwa equipped with
PicoMill CNC. PicoMill CNC. High-tech for Production and Training Purposes. CNC Mini Drill Press/Milling Machine.
 CNC Mini Drill Press/Milling Machine High-tech for Production and Training Purposes Table travel X, Y 10 x 4.13 Spindle mount MT3 With advanced GPlus 450 CNC or Siemens 808 D control GPlus 450 Siemens
CNC Mini Drill Press/Milling Machine High-tech for Production and Training Purposes Table travel X, Y 10 x 4.13 Spindle mount MT3 With advanced GPlus 450 CNC or Siemens 808 D control GPlus 450 Siemens
May Edited by: Roemi E. Fernández Héctor Montes
 May 2016 Edited by: Roemi E. Fernández Héctor Montes RoboCity16 Open Conference on Future Trends in Robotics Editors Roemi E. Fernández Saavedra Héctor Montes Franceschi Madrid, 26 May 2016 Edited by:
May 2016 Edited by: Roemi E. Fernández Héctor Montes RoboCity16 Open Conference on Future Trends in Robotics Editors Roemi E. Fernández Saavedra Héctor Montes Franceschi Madrid, 26 May 2016 Edited by:
ArtiMinds Robot Programming Suite
 ArtiMinds Robot Programming Suite Fast Intuitive Easy Flexible Robust ArtiMinds Robotics GmbH - Albert-Nestler-Straße 11-76131 Karlsruhe - www.artiminds.com AUTOMATING OUR WORLD Your benefits with ArtiMinds
ArtiMinds Robot Programming Suite Fast Intuitive Easy Flexible Robust ArtiMinds Robotics GmbH - Albert-Nestler-Straße 11-76131 Karlsruhe - www.artiminds.com AUTOMATING OUR WORLD Your benefits with ArtiMinds
MultiLine MS52C3. CNC Multi Spindle Turning Machine
 MultiLine MS52C3 CNC Multi Spindle Turning Machine MultiLine MS52C3 INDEX CNC multi-spindle machines: The standard to beat! With the totally configurable MS52C3, we offer a machine concept that meets all
MultiLine MS52C3 CNC Multi Spindle Turning Machine MultiLine MS52C3 INDEX CNC multi-spindle machines: The standard to beat! With the totally configurable MS52C3, we offer a machine concept that meets all
Affordable Real-Time Vision Guidance for Robot Motion Control
 Affordable Real-Time Vision Guidance for Robot Motion Control Cong Wang Assistant Professor ECE and MIE Departments New Jersey Institute of Technology Mobile: (510)529-6691 Office: (973)596-5744 Advanced
Affordable Real-Time Vision Guidance for Robot Motion Control Cong Wang Assistant Professor ECE and MIE Departments New Jersey Institute of Technology Mobile: (510)529-6691 Office: (973)596-5744 Advanced
SPIDERMAN VR. Adam Elgressy and Dmitry Vlasenko
 SPIDERMAN VR Adam Elgressy and Dmitry Vlasenko Supervisors: Boaz Sternfeld and Yaron Honen Submission Date: 09/01/2019 Contents Who We Are:... 2 Abstract:... 2 Previous Work:... 3 Tangent Systems & Development
SPIDERMAN VR Adam Elgressy and Dmitry Vlasenko Supervisors: Boaz Sternfeld and Yaron Honen Submission Date: 09/01/2019 Contents Who We Are:... 2 Abstract:... 2 Previous Work:... 3 Tangent Systems & Development
Industrial Graphics Skills SAS 2015
 Sample unit of work Residential renovations and extensions The sample unit of work provides teaching strategies and learning experiences that facilitate students demonstration of the dimensions and objectives
Sample unit of work Residential renovations and extensions The sample unit of work provides teaching strategies and learning experiences that facilitate students demonstration of the dimensions and objectives
ENHANCED HUMAN-AGENT INTERACTION: AUGMENTING INTERACTION MODELS WITH EMBODIED AGENTS BY SERAFIN BENTO. MASTER OF SCIENCE in INFORMATION SYSTEMS
 BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing
 A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
WIRELESS VOICE CONTROLLED ROBOTICS ARM
 WIRELESS VOICE CONTROLLED ROBOTICS ARM 1 R.ASWINBALAJI, 2 A.ARUNRAJA 1 BE ECE,SRI RAMAKRISHNA ENGINEERING COLLEGE,COIMBATORE,INDIA 2 ME EST,SRI RAMAKRISHNA ENGINEERING COLLEGE,COIMBATORE,INDIA aswinbalaji94@gmail.com
WIRELESS VOICE CONTROLLED ROBOTICS ARM 1 R.ASWINBALAJI, 2 A.ARUNRAJA 1 BE ECE,SRI RAMAKRISHNA ENGINEERING COLLEGE,COIMBATORE,INDIA 2 ME EST,SRI RAMAKRISHNA ENGINEERING COLLEGE,COIMBATORE,INDIA aswinbalaji94@gmail.com
University of Toronto. Companion Robot Security. ECE1778 Winter Wei Hao Chang Apper Alexander Hong Programmer
 University of Toronto Companion ECE1778 Winter 2015 Creative Applications for Mobile Devices Wei Hao Chang Apper Alexander Hong Programmer April 9, 2015 Contents 1 Introduction 3 1.1 Problem......................................
University of Toronto Companion ECE1778 Winter 2015 Creative Applications for Mobile Devices Wei Hao Chang Apper Alexander Hong Programmer April 9, 2015 Contents 1 Introduction 3 1.1 Problem......................................
E90 Project Proposal. 6 December 2006 Paul Azunre Thomas Murray David Wright
 E90 Project Proposal 6 December 2006 Paul Azunre Thomas Murray David Wright Table of Contents Abstract 3 Introduction..4 Technical Discussion...4 Tracking Input..4 Haptic Feedack.6 Project Implementation....7
E90 Project Proposal 6 December 2006 Paul Azunre Thomas Murray David Wright Table of Contents Abstract 3 Introduction..4 Technical Discussion...4 Tracking Input..4 Haptic Feedack.6 Project Implementation....7
Servo Indexer Reference Guide
 Servo Indexer Reference Guide Generation 2 - Released 1/08 Table of Contents General Description...... 3 Installation...... 4 Getting Started (Quick Start)....... 5 Jog Functions..... 8 Home Utilities......
Servo Indexer Reference Guide Generation 2 - Released 1/08 Table of Contents General Description...... 3 Installation...... 4 Getting Started (Quick Start)....... 5 Jog Functions..... 8 Home Utilities......
Computer-Aided Safety and Risk Prevention Pushing collaborative robotics from isolated pilots to large scale deployment
 Pushing collaborative robotics from isolated pilots to large scale deployment INRS, Nancy, France J. Saenz, C. Vogel, R. Behrens, E. Schulenburg, C. Walter, N. Elkmann 30.03.2017 Fraunhofer IFF Fraunhofer
Pushing collaborative robotics from isolated pilots to large scale deployment INRS, Nancy, France J. Saenz, C. Vogel, R. Behrens, E. Schulenburg, C. Walter, N. Elkmann 30.03.2017 Fraunhofer IFF Fraunhofer
Accessible Power Tool Flexible Application Scalable Solution
 Accessible Power Tool Flexible Application Scalable Solution Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a
Accessible Power Tool Flexible Application Scalable Solution Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Hammer: An Android Based Application for End-User Industrial Robot Programming
 Hammer: An Android Based Application for End-User Industrial Robot Programming Carlos Mateo, Alberto Brunete, Ernesto Gambao, Miguel Hernando Centre for Robotics and Automation (CAR UPM-CSIC) Universidad
Hammer: An Android Based Application for End-User Industrial Robot Programming Carlos Mateo, Alberto Brunete, Ernesto Gambao, Miguel Hernando Centre for Robotics and Automation (CAR UPM-CSIC) Universidad
Hauschild GmbH. Magazine systems, Process automation, Robotic machining cells, Sorters
 GmbH Hauschild Hauschild GmbH Kohlfurther Brücke 69 42349 Wuppertal Germany Tel.: +49 202 24742-0 Fax: +49 202 24742-42 info@hauschildgmbh.com www.hauschildgmbh.com Magazine systems, Process automation,
GmbH Hauschild Hauschild GmbH Kohlfurther Brücke 69 42349 Wuppertal Germany Tel.: +49 202 24742-0 Fax: +49 202 24742-42 info@hauschildgmbh.com www.hauschildgmbh.com Magazine systems, Process automation,
Factories of the Future Industry 4.0 The European Perspective
 Factories of the Future Industry 4.0 The European Perspective Luis Carneiro INESC TEC, on behalf of EFFRA Agenda The importance of the manufacturing industry EFFRA The European Factories of the Future
Factories of the Future Industry 4.0 The European Perspective Luis Carneiro INESC TEC, on behalf of EFFRA Agenda The importance of the manufacturing industry EFFRA The European Factories of the Future
KORE: Basic Course KUKA Official Robot Education
 Training KUKAKA Robotics USA KORE: Basic Course KUKA Official Robot Education Target Group: School and College Students Issued: 19.09.2014 Version: KORE: Basic Course V1.1 Contents 1 Introduction to robotics...
Training KUKAKA Robotics USA KORE: Basic Course KUKA Official Robot Education Target Group: School and College Students Issued: 19.09.2014 Version: KORE: Basic Course V1.1 Contents 1 Introduction to robotics...
Haptic Rendering CPSC / Sonny Chan University of Calgary
 Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
HALTER AUTOMATION. It s gripping stuff...
 HALTER AUTOMATION It s gripping stuff... Hyfore is the UK distributor for Halter CNC Automation, the Netherlands based supplier of machine tool robotic loading and unloading systems. Sitting alongside
HALTER AUTOMATION It s gripping stuff... Hyfore is the UK distributor for Halter CNC Automation, the Netherlands based supplier of machine tool robotic loading and unloading systems. Sitting alongside
Towards Interactive Learning for Manufacturing Assistants. Andreas Stopp Sven Horstmann Steen Kristensen Frieder Lohnert
 Towards Interactive Learning for Manufacturing Assistants Andreas Stopp Sven Horstmann Steen Kristensen Frieder Lohnert DaimlerChrysler Research and Technology Cognition and Robotics Group Alt-Moabit 96A,
Towards Interactive Learning for Manufacturing Assistants Andreas Stopp Sven Horstmann Steen Kristensen Frieder Lohnert DaimlerChrysler Research and Technology Cognition and Robotics Group Alt-Moabit 96A,
Formation and Cooperation for SWARMed Intelligent Robots
 Formation and Cooperation for SWARMed Intelligent Robots Wei Cao 1 Yanqing Gao 2 Jason Robert Mace 3 (West Virginia University 1 University of Arizona 2 Energy Corp. of America 3 ) Abstract This article
Formation and Cooperation for SWARMed Intelligent Robots Wei Cao 1 Yanqing Gao 2 Jason Robert Mace 3 (West Virginia University 1 University of Arizona 2 Energy Corp. of America 3 ) Abstract This article
Intelligent interaction
 BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
BionicWorkplace: autonomously learning workstation for human-machine collaboration Intelligent interaction Face to face, hand in hand. The BionicWorkplace shows the extent to which human-machine collaboration
Computer Aided Manufacturing
 Computer Aided Manufacturing CNC Milling used as representative example of CAM practice. CAM applies to lathes, lasers, waterjet, wire edm, stamping, braking, drilling, etc. CAM derives process information
Computer Aided Manufacturing CNC Milling used as representative example of CAM practice. CAM applies to lathes, lasers, waterjet, wire edm, stamping, braking, drilling, etc. CAM derives process information
INDUSTRIAL ROBOTS PROGRAMMING: BUILDING APPLICATIONS FOR THE FACTORIES OF THE FUTURE
 INDUSTRIAL ROBOTS PROGRAMMING: BUILDING APPLICATIONS FOR THE FACTORIES OF THE FUTURE INDUSTRIAL ROBOTS PROGRAMMING: BUILDING APPLICATIONS FOR THE FACTORIES OF THE FUTURE J. Norberto Pires Mechanical Engineering
INDUSTRIAL ROBOTS PROGRAMMING: BUILDING APPLICATIONS FOR THE FACTORIES OF THE FUTURE INDUSTRIAL ROBOTS PROGRAMMING: BUILDING APPLICATIONS FOR THE FACTORIES OF THE FUTURE J. Norberto Pires Mechanical Engineering
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Bringing a sense of touch to robotic hands. Matthias Zenker
 Bringing a sense of touch to robotic hands Matthias Zenker Bielefeld University / CITEC Germany 1 Fachworkshop Mechatronic Integrated Devices (MID) Nuremberg, February 13, 2014 Cognitive Interaction Technology
Bringing a sense of touch to robotic hands Matthias Zenker Bielefeld University / CITEC Germany 1 Fachworkshop Mechatronic Integrated Devices (MID) Nuremberg, February 13, 2014 Cognitive Interaction Technology
BUILT IN SAFETY SYSTEM CE APPROVED SMALL AND SMART CALL ME COWELDER 1 A COLLABORATIVE WELDING ROBOT
 BUILT IN SAFETY SYSTEM CE APPROVED...... SMALL AND SMART CALL ME COWELDER 1 A COLLABORATIVE WELDING ROBOT CONTENT A new welding assistant 3 Technical data welding machines 4 Technical data UR5 5 CoWelder
BUILT IN SAFETY SYSTEM CE APPROVED...... SMALL AND SMART CALL ME COWELDER 1 A COLLABORATIVE WELDING ROBOT CONTENT A new welding assistant 3 Technical data welding machines 4 Technical data UR5 5 CoWelder
The following surface mount LED s are suitable as additional LEDs for mounting on the module:
 MOBILE PHONE MODULE The mobile phone module is designed to flash a light pattern when a phone signal is detected. The module will react to either incoming or outgoing signals. The module will detect frequencies
MOBILE PHONE MODULE The mobile phone module is designed to flash a light pattern when a phone signal is detected. The module will react to either incoming or outgoing signals. The module will detect frequencies
Robot application with Gema
 Metallbau Ferk, Austria Robot application with Gema When maximum flexibility and perfect coating quality are required, robots are the solution. Multi-axis robots specially developed for the coating industry
Metallbau Ferk, Austria Robot application with Gema When maximum flexibility and perfect coating quality are required, robots are the solution. Multi-axis robots specially developed for the coating industry
Virtual Grasping Using a Data Glove
 Virtual Grasping Using a Data Glove By: Rachel Smith Supervised By: Dr. Kay Robbins 3/25/2005 University of Texas at San Antonio Motivation Navigation in 3D worlds is awkward using traditional mouse Direct
Virtual Grasping Using a Data Glove By: Rachel Smith Supervised By: Dr. Kay Robbins 3/25/2005 University of Texas at San Antonio Motivation Navigation in 3D worlds is awkward using traditional mouse Direct
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Page ENSC387 - Introduction to Electro-Mechanical Sensors and Actuators: Simon Fraser University Engineering Science
 Motor Driver and Feedback Control: The feedback control system of a dc motor typically consists of a microcontroller, which provides drive commands (rotation and direction) to the driver. The driver is
Motor Driver and Feedback Control: The feedback control system of a dc motor typically consists of a microcontroller, which provides drive commands (rotation and direction) to the driver. The driver is
Design and Control of the BUAA Four-Fingered Hand
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,