Introduction to Mobile Robotics Welcome
|
|
|
- Lynette Sparks
- 5 years ago
- Views:
Transcription


1 Introduction to Mobile Robotics Welcome Wolfram Burgard, Michael Ruhnke, Bastian Steder 1
2 Today This course Robotics in the past and today 2
3 Organization Wed 14:00 16:00 Fr 14:00 15:00 lectures, discussions Fr 15:00 16:00 homework, practical exercises (Python/Octave) Web page: Exam: Written 3
4 Goal of this course Provide an overview of problems / approaches in mobile robotics Probabilistic reasoning: Dealing with noisy data Hands-on experience 4
5 Content of this Course 1. Linear Algebra 2. Wheeled Locomotion 3. Sensors 4. Probabilities and Bayes 5. Probabilistic Motion Models 6. Probabilistic Sensor Models 7. Mapping with Known Poses 8. The Kalman Filter 9. The Extended Kalman Filter 10.Discrete Filters 11.The Particle Filter, MCL 12. SLAM: Simultaneous Localization and Mapping 13. SLAM: Landmark-based FastSLAM 14. SLAM: Grid-based FastSLAM 15. SLAM: Graph-based SLAM 16. Techniques for 3D Mapping 17. Iterative Closest Points Algorithm 18. Path Planning and Collision Avoidance 19. Multi-Robot Exploration 20. Information-Driven Exploration 21. Summary 5

6 Reference Book Thrun, Burgard, and Fox: Probabilistic Robotics
7 Relevant other Courses Foundations of Artificial Intelligence Computer Vision Machine Learning and many others from the area of cognitive technical systems. 7
8 Opportunities Project Practical Seminar Thesis your future! 8
9 Autonomous Robot Systems perceive their environment and generate actions to achieve their goals. model sense environment act
10 Tasks Addressed that Need to be Solved by Robots Navigation Perception Learning Cooperation Acting Interaction Robot development Manipulation Grasping Planning Reasoning

11 Robotics Yesterday 12
12 Current Trends in Robotics Robots are moving away from factory floors to Entertainment, toys Personal services Medical, surgery Industrial automation (mining, harvesting, ) Hazardous environments (space, underwater) 13
")
13 Shakey the Robot (1966) 14
")
14 Shakey the Robot (1966) 15
15 Robotics Today Lawn mowers Vacuum cleaners Self-driving cars Logistics 17

16 The Helpmate System 18

17 Autonomous Vacuum Cleaners

18 Autonomous Lawn Mowers 20

19 DARPA Grand Challenge [Courtesy by Sebastian Thrun] 21

20 Die DARPA Urban Challenge

21 Walking Robots [Courtesy by Boston Dynamics]

22 Humanoids Climbing Staircases


23 Androids Overcoming the uncanny valley [Courtesy by Hiroshi Ishiguro]

24 Driving in the Google Car

25 Autonomous Motorcycles [Courtesy by Anthony Levandowski]

26 The Google Self Driving Car 28

27 Folding Towels

28 Rhino (Univ. Bonn + CMU, 1997) 30
 Minerva")
29 Minerva (CMU + Univ. Bonn, 1998) Minerva 31
30 Robotics in Freiburg 32

31 Autonomous Parking


32 Autonomous Quadrotor Navigation Custom-built system: laser range finder inertial measurement unit embedded CPU laser mirror

33 Precise Localization and Positioning for Mobile Robots

34 Obelix A Robot Traveling to Downtown Freiburg

35 The Obelix Challenge (Aug 21, 2012)

36 The Tagesthemen-Report

37 Brain-controlled Robots 39

38 Teaching: Student Project on the Autonomous Portrait Robot

39 Final Result
40 Other Cool Stuff from AIS 42
 Safety")

41 Accurate Localization KUKA omnimove (11t) Safety scanners Error in the area of millimeters Even in dynamic environments


42 26 Units installed at Boeing Fuselage assembly 20 vehicles to transport industrial robots for drilling and filling of 60,000 fasteners in 6 vehicles for logistics of parts, work stands and fuselages

43

44 Deep Learning to Manipulate from Parallel Interaction Source: Google Research Blog


45 Learning User Preferences Task preferences are subjective Fixed rules do not match all users Constantly querying humans is suboptimal How to handle new objects? Where does this go?
46 Collaborative Filtering - - -?

47 Collaborative Filtering - - -

48 Online Prediction of Preferences
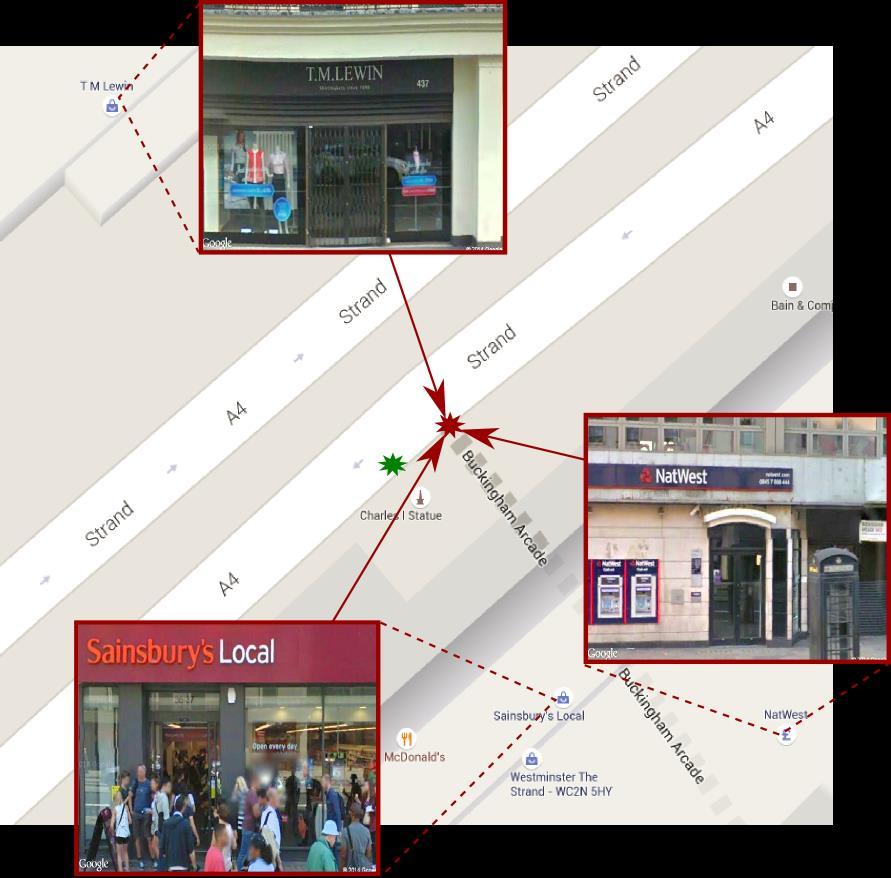
49 Localization in Urban Environments Inaccurate (if even available) GPS signal No map Limited Internet




50 Motivation

51 Example




52 Example contin. Text: irpostbankfmarzcenter tllgi Matched Landmarks: Postbank finanzcenter Text: melange Matched Landmarks: Melange Melange Text: casanova Matched Landmarks: Casanova
53 Example






54 Deep Learning Applications RGB-D object recognition Images human part segmentation Sound classification terrain



55 DCN for Object Recognition Fusion layers automatically learn to combine feature responses of the two network streams During training, weights in first layers stay fixed
 Method RGB Depth RGB-D CNN-RNN 80.8 78.9 86.8 HMP 82.")
56 Learning Results [Lai et. al, 2011] Category-Level Recognition [%] (51 categories) Method RGB Depth RGB-D CNN-RNN HMP CaRFs N/A N/A 88.1 CNN Features 83.1 N/A 89.4 This work, Fus-CNN

57 Network Architecture Fully convolutional network Contraction and expansion of network input Up-convolution operation for expansion Pixel input, pixel output

58 Deep Learning for Body Part Segmentation Input Image Ground Truth Segmentation mask


59 Deep Learning for Terrain Classification using Sound

60 Network Architecture Novel architecture designed for unstructured sound data Global pooling gathers statistics of learned features across time














61 Data Collection Wood Linoleu m Carpet P3-DX Asphal t Mowe d Grass Grass Paving Cobble Stone Offroa d
62 Results - Baseline Comparison (300ms window) [1] [2] [5] [6] [3] [4] 16.9% 99.41% improvement using a 500ms over window the previous state of the art [1] T. Giannakopoulos, K. Dimitrios, A. Andreas, and T. Sergios, SETN 2006 [2] M. C. Wellman, N. Srour, and D. B. Hillis, SPIE [3] J. Libby and A. Stentz, ICRA 2012 [4] D. Ellis, ISMIR 2007 [5] G. Tzanetakis and P. Cook, IEEE TASLP 2002 [6] V. Brijesh, and M. Blumenstein, Pattern Recognition Technologies and Applications 2008
63 Thank you and enjoy the course! 66
The Future of AI A Robotics Perspective
 The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
Robot Mapping. Introduction to Robot Mapping. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping Introduction to Robot Mapping Gian Diego Tipaldi, Wolfram Burgard 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms
Robot Mapping Introduction to Robot Mapping Gian Diego Tipaldi, Wolfram Burgard 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
What is Robot Mapping? Robot Mapping. Introduction to Robot Mapping. Related Terms. What is SLAM? ! Robot a device, that moves through the environment
 Robot Mapping Introduction to Robot Mapping What is Robot Mapping?! Robot a device, that moves through the environment! Mapping modeling the environment Cyrill Stachniss 1 2 Related Terms State Estimation
Robot Mapping Introduction to Robot Mapping What is Robot Mapping?! Robot a device, that moves through the environment! Mapping modeling the environment Cyrill Stachniss 1 2 Related Terms State Estimation
Robot Mapping. Introduction to Robot Mapping. Cyrill Stachniss
 Robot Mapping Introduction to Robot Mapping Cyrill Stachniss 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms State Estimation
Robot Mapping Introduction to Robot Mapping Cyrill Stachniss 1 What is Robot Mapping? Robot a device, that moves through the environment Mapping modeling the environment 2 Related Terms State Estimation
Robot Motion Control and Planning
 Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
Autonomous Mobile Robots
 Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Robots Leaving the Production Halls Opportunities and Challenges
 Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Roboter lernen sehen und selbst zu navigieren - Chancen und Herausforderungen autonomer Roboter für die Arbeits- und Alltagswelt.
 Shaping the future Roboter lernen sehen und selbst zu navigieren - Chancen und Herausforderungen autonomer Roboter für die Arbeits- und Alltagswelt. Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch
Shaping the future Roboter lernen sehen und selbst zu navigieren - Chancen und Herausforderungen autonomer Roboter für die Arbeits- und Alltagswelt. Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
International Journal of Informative & Futuristic Research ISSN (Online):
:") Reviewed Paper Volume 2 Issue 4 December 2014 International Journal of Informative & Futuristic Research ISSN (Online): 2347-1697 A Survey On Simultaneous Localization And Mapping Paper ID IJIFR/ V2/ E4/
Reviewed Paper Volume 2 Issue 4 December 2014 International Journal of Informative & Futuristic Research ISSN (Online): 2347-1697 A Survey On Simultaneous Localization And Mapping Paper ID IJIFR/ V2/ E4/
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Introduction to Robotics
 Introduction to Robotics CIS 32.5 Fall 2009 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics CIS 32.5 Fall 2009 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Intelligent Robotic Systems!! CS 685!! Jana Kosecka, 4444 Research II! ! Office hours Tue 2-3pm!
 Intelligent Robotic Systems!! CS 685!! Jana Kosecka, 4444 Research II! kosecka@gmu.edu, 3-1876! Office hours Tue 2-3pm! Logistics! Grading: Homeworks + Project 65% Exam: 35%! Prerequisites: basic statistical
Intelligent Robotic Systems!! CS 685!! Jana Kosecka, 4444 Research II! kosecka@gmu.edu, 3-1876! Office hours Tue 2-3pm! Logistics! Grading: Homeworks + Project 65% Exam: 35%! Prerequisites: basic statistical
Slides that go with the book
 Autonomous Mobile Robots, Chapter Autonomous Mobile Robots, Chapter Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? Slides that go
Autonomous Mobile Robots, Chapter Autonomous Mobile Robots, Chapter Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? Slides that go
MTRX 4700 : Experimental Robotics
 Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
Intro to AI. AI is a huge field. AI is a huge field 2/19/15. What is AI. One definition:
 Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
Lecture: Allows operation in enviroment without prior knowledge
 Lecture: SLAM Lecture: Is it possible for an autonomous vehicle to start at an unknown environment and then to incrementally build a map of this enviroment while simulaneous using this map for vehicle
Lecture: SLAM Lecture: Is it possible for an autonomous vehicle to start at an unknown environment and then to incrementally build a map of this enviroment while simulaneous using this map for vehicle
Introduction to Robotics
 Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Textbook (slides taken from those provided by Siegwart and Nourbakhsh with a (few) additions) Intelligent Robotics and Autonomous
Introduction to Robotics
 Autonomous Mobile Robots, Chapter Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Autonomous Mobile Robots, Chapter Textbook (slides taken from those provided by Siegwart and
Autonomous Mobile Robots, Chapter Introduction to Robotics CSc 8400 Fall 2005 Simon Parsons Brooklyn College Autonomous Mobile Robots, Chapter Textbook (slides taken from those provided by Siegwart and
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Intro to AI. AI is a huge field. AI is a huge field 2/26/16. What is AI (artificial intelligence) What is AI. One definition:
 What is AI. One definition:") Intro to AI CS30 David Kauchak Spring 2016 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI (artificial intelligence) AI
Intro to AI CS30 David Kauchak Spring 2016 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI (artificial intelligence) AI
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Collaborative Multi-Robot Exploration
 IEEE International Conference on Robotics and Automation (ICRA), 2 Collaborative Multi-Robot Exploration Wolfram Burgard y Mark Moors yy Dieter Fox z Reid Simmons z Sebastian Thrun z y Department of Computer
IEEE International Conference on Robotics and Automation (ICRA), 2 Collaborative Multi-Robot Exploration Wolfram Burgard y Mark Moors yy Dieter Fox z Reid Simmons z Sebastian Thrun z y Department of Computer
Creating a 3D environment map from 2D camera images in robotics
 Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Intelligent Vehicle Localization Using GPS, Compass, and Machine Vision
 The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Intelligent Vehicle Localization Using GPS, Compass, and Machine Vision Somphop Limsoonthrakul,
The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Intelligent Vehicle Localization Using GPS, Compass, and Machine Vision Somphop Limsoonthrakul,
What is a robot. Robots (seen as artificial beings) appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW
 appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW") ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization
 Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics?
 16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
Computational Principles of Mobile Robotics
 Computational Principles of Mobile Robotics Mobile robotics is a multidisciplinary field involving both computer science and engineering. Addressing the design of automated systems, it lies at the intersection
Computational Principles of Mobile Robotics Mobile robotics is a multidisciplinary field involving both computer science and engineering. Addressing the design of automated systems, it lies at the intersection
Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots
 16-782 Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Class Logistics Instructor:
16-782 Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Class Logistics Instructor:
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Cognitive Robotics 2017/2018
 Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Announcements. HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. to me.
 assignment. Assigned today; Due Friday, Dec. 9. to me.") Announcements HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. E-mail to me. Quiz 4 : OPTIONAL: Take home quiz, open book. If you re happy with your quiz grades so far, you
Announcements HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. E-mail to me. Quiz 4 : OPTIONAL: Take home quiz, open book. If you re happy with your quiz grades so far, you
Mobile Robots Exploration and Mapping in 2D
 ASEE 2014 Zone I Conference, April 3-5, 2014, University of Bridgeport, Bridgpeort, CT, USA. Mobile Robots Exploration and Mapping in 2D Sithisone Kalaya Robotics, Intelligent Sensing & Control (RISC)
ASEE 2014 Zone I Conference, April 3-5, 2014, University of Bridgeport, Bridgpeort, CT, USA. Mobile Robots Exploration and Mapping in 2D Sithisone Kalaya Robotics, Intelligent Sensing & Control (RISC)
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition
 Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
A Quick history. Ioannis Rekleitis
 A Quick history Ioannis Rekleitis Robot Reason Sense Act 2 Talos (Τάλως/Τάλων) 400 BC A giant man of bronze who protected Europa in Crete, circling the island's shores three times daily while guarding
A Quick history Ioannis Rekleitis Robot Reason Sense Act 2 Talos (Τάλως/Τάλων) 400 BC A giant man of bronze who protected Europa in Crete, circling the island's shores three times daily while guarding
Overview. Pre AI developments. Birth of AI, early successes. Overwhelming optimism underwhelming results
 Help Overview Administrivia History/applications Modeling agents/environments What can we learn from the past? 1 Pre AI developments Philosophy: intelligence can be achieved via mechanical computation
Help Overview Administrivia History/applications Modeling agents/environments What can we learn from the past? 1 Pre AI developments Philosophy: intelligence can be achieved via mechanical computation
CS295-1 Final Project : AIBO
 CS295-1 Final Project : AIBO Mert Akdere, Ethan F. Leland December 20, 2005 Abstract This document is the final report for our CS295-1 Sensor Data Management Course Final Project: Project AIBO. The main
CS295-1 Final Project : AIBO Mert Akdere, Ethan F. Leland December 20, 2005 Abstract This document is the final report for our CS295-1 Sensor Data Management Course Final Project: Project AIBO. The main
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
ME 597/780 AUTONOMOUS MOBILE ROBOTICS SECTION 1: INTRODUCTION
 ME 597/780 AUTONOMOUS MOBILE ROBOTICS SECTION 1: INTRODUCTION Prof. Steven Waslander SYLLABUS Contact Info: Prof. Steven Waslander E3X-4118 (519) 888-4567 x32205 stevenw@uwaterloo.ca Michael Smart E5-3012
ME 597/780 AUTONOMOUS MOBILE ROBOTICS SECTION 1: INTRODUCTION Prof. Steven Waslander SYLLABUS Contact Info: Prof. Steven Waslander E3X-4118 (519) 888-4567 x32205 stevenw@uwaterloo.ca Michael Smart E5-3012
Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development paradigm
 development paradigm") Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
CS343 Introduction to Artificial Intelligence Spring 2010
 CS343 Introduction to Artificial Intelligence Spring 2010 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
CS343 Introduction to Artificial Intelligence Spring 2010 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
Walking and Flying Robots for Challenging Environments
 Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
High Speed vslam Using System-on-Chip Based Vision. Jörgen Lidholm Mälardalen University Västerås, Sweden
 High Speed vslam Using System-on-Chip Based Vision Jörgen Lidholm Mälardalen University Västerås, Sweden jorgen.lidholm@mdh.se February 28, 2007 1 The ChipVision Project Within the ChipVision project we
High Speed vslam Using System-on-Chip Based Vision Jörgen Lidholm Mälardalen University Västerås, Sweden jorgen.lidholm@mdh.se February 28, 2007 1 The ChipVision Project Within the ChipVision project we
CS 378: Autonomous Intelligent Robotics. Instructor: Jivko Sinapov
 CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Semester Schedule C++ and Robot Operating System (ROS) Learning to use our robots Computational
CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Semester Schedule C++ and Robot Operating System (ROS) Learning to use our robots Computational
4D-Particle filter localization for a simulated UAV
 4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
4/1/2011. Ken Goldberg UC Berkeley. Robot
 The World of Robots history Ken Goldberg UC Berkeley 2 history Robot Karel Capek, R.U.R. (1923) 3 1 Two Classes of Robots Industrial robot : Reprogrammable, multi-function manipulator with 3 or more axes.
The World of Robots history Ken Goldberg UC Berkeley 2 history Robot Karel Capek, R.U.R. (1923) 3 1 Two Classes of Robots Industrial robot : Reprogrammable, multi-function manipulator with 3 or more axes.
IEEE Systems, Man, and Cybernetics Society s Perspectives and Brain-Related Technical Activities
 IEEE, Man, and Cybernetics Society s Perspectives and Brain-Related Technical Activities Michael H. Smith IEEE Brain Initiative New York City Three Broad Categories that Span IEEE Development of: novel
IEEE, Man, and Cybernetics Society s Perspectives and Brain-Related Technical Activities Michael H. Smith IEEE Brain Initiative New York City Three Broad Categories that Span IEEE Development of: novel
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
CS343 Introduction to Artificial Intelligence Spring 2012
 CS343 Introduction to Artificial Intelligence Spring 2012 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
CS343 Introduction to Artificial Intelligence Spring 2012 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots
 Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
Robotics and Autonomous Systems
 1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
CS594, Section 30682:
 CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
Robotic Technology for Port and Maritime Automation
 Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
Team Description Paper
 Tinker@Home 2016 Team Description Paper Jiacheng Guo, Haotian Yao, Haocheng Ma, Cong Guo, Yu Dong, Yilin Zhu, Jingsong Peng, Xukang Wang, Shuncheng He, Fei Xia and Xunkai Zhang Future Robotics Club(Group),
Tinker@Home 2016 Team Description Paper Jiacheng Guo, Haotian Yao, Haocheng Ma, Cong Guo, Yu Dong, Yilin Zhu, Jingsong Peng, Xukang Wang, Shuncheng He, Fei Xia and Xunkai Zhang Future Robotics Club(Group),
Embedding Artificial Intelligence into Our Lives
 Embedding Artificial Intelligence into Our Lives Michael Thompson, Synopsys D&R IP-SOC DAYS Santa Clara April 2018 1 Agenda Introduction What AI is and is Not Where AI is being used Rapid Advance of AI
Embedding Artificial Intelligence into Our Lives Michael Thompson, Synopsys D&R IP-SOC DAYS Santa Clara April 2018 1 Agenda Introduction What AI is and is Not Where AI is being used Rapid Advance of AI
CS686: High-level Motion/Path Planning Applications
 CS686: High-level Motion/Path Planning Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Discuss my general research view on motion planning Discuss
CS686: High-level Motion/Path Planning Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Discuss my general research view on motion planning Discuss
Team Description Paper
 Tinker@Home 2014 Team Description Paper Changsheng Zhang, Shaoshi beng, Guojun Jiang, Fei Xia, and Chunjie Chen Future Robotics Club, Tsinghua University, Beijing, 100084, China http://furoc.net Abstract.
Tinker@Home 2014 Team Description Paper Changsheng Zhang, Shaoshi beng, Guojun Jiang, Fei Xia, and Chunjie Chen Future Robotics Club, Tsinghua University, Beijing, 100084, China http://furoc.net Abstract.
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CS 730/830: Intro AI. Prof. Wheeler Ruml. TA Bence Cserna. Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1
 CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
GNSS in Autonomous Vehicles MM Vision
 GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
Foreword Editorial Contents Executive Summary World Robotics 2017 Service Robots... 12
 Contents 7 Contents Foreword... 3 Editorial... 5 Contents... 7 Executive Summary World Robotics 2017 Service Robots... 12 1 Introduction into Service Robotics... 22 1.1 Structure of the World Robotics
Contents 7 Contents Foreword... 3 Editorial... 5 Contents... 7 Executive Summary World Robotics 2017 Service Robots... 12 1 Introduction into Service Robotics... 22 1.1 Structure of the World Robotics
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation
 Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
PROJECTS 2017/18 AUTONOMOUS SYSTEMS. Instituto Superior Técnico. Departamento de Engenharia Electrotécnica e de Computadores September 2017
 AUTONOMOUS SYSTEMS PROJECTS 2017/18 Instituto Superior Técnico Departamento de Engenharia Electrotécnica e de Computadores September 2017 LIST OF AVAILABLE ROBOTS AND DEVICES 7 Pioneers 3DX (with Hokuyo
AUTONOMOUS SYSTEMS PROJECTS 2017/18 Instituto Superior Técnico Departamento de Engenharia Electrotécnica e de Computadores September 2017 LIST OF AVAILABLE ROBOTS AND DEVICES 7 Pioneers 3DX (with Hokuyo
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
CIS 849: Autonomous Robot Vision
 CIS 849: Autonomous Robot Vision Instructor: Christopher Rasmussen Course web page: www.cis.udel.edu/~cer/arv September 5, 2002 Purpose of this Course To provide an introduction to the uses of visual sensing
CIS 849: Autonomous Robot Vision Instructor: Christopher Rasmussen Course web page: www.cis.udel.edu/~cer/arv September 5, 2002 Purpose of this Course To provide an introduction to the uses of visual sensing
This list supersedes the one published in the November 2002 issue of CR.
 PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
In cooperative robotics, the group of robots have the same goals, and thus it is
 Brian Bairstow 16.412 Problem Set #1 Part A: Cooperative Robotics In cooperative robotics, the group of robots have the same goals, and thus it is most efficient if they work together to achieve those
Brian Bairstow 16.412 Problem Set #1 Part A: Cooperative Robotics In cooperative robotics, the group of robots have the same goals, and thus it is most efficient if they work together to achieve those
Keywords: Multi-robot adversarial environments, real-time autonomous robots
 ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
Artificial Intelligence: Definition
 Lecture Notes Artificial Intelligence: Definition Dae-Won Kim School of Computer Science & Engineering Chung-Ang University What are AI Systems? Deep Blue defeated the world chess champion Garry Kasparov
Lecture Notes Artificial Intelligence: Definition Dae-Won Kim School of Computer Science & Engineering Chung-Ang University What are AI Systems? Deep Blue defeated the world chess champion Garry Kasparov
COS Lecture 7 Autonomous Robot Navigation
 COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 7 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Introduction to Computer Science
 Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
Introduction to Computer Science CSCI 109 Andrew Goodney Fall 2017 China Tianhe-2 Robotics Nov. 20, 2017 Schedule 1 Robotics ì Acting on the physical world 2 What is robotics? uthe study of the intelligent
CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes.
 CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes. Artificial Intelligence A branch of Computer Science. Examines how we can achieve intelligent
CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes. Artificial Intelligence A branch of Computer Science. Examines how we can achieve intelligent
An Experimental Comparison of Localization Methods
 An Experimental Comparison of Localization Methods Jens-Steffen Gutmann Wolfram Burgard Dieter Fox Kurt Konolige Institut für Informatik Institut für Informatik III SRI International Universität Freiburg
An Experimental Comparison of Localization Methods Jens-Steffen Gutmann Wolfram Burgard Dieter Fox Kurt Konolige Institut für Informatik Institut für Informatik III SRI International Universität Freiburg
Robots in society: Event 2
 Robots in society: Event 2 Service Robots Professor Gurvinder Singh Virk Technical Director, InnotecUK Trustee, CLAWAR Association Ltd Innovative Technology and Science Ltd InnoTecUK set up in 2009 and
Robots in society: Event 2 Service Robots Professor Gurvinder Singh Virk Technical Director, InnotecUK Trustee, CLAWAR Association Ltd Innovative Technology and Science Ltd InnoTecUK set up in 2009 and
Durham E-Theses. Development of Collaborative SLAM Algorithm for Team of Robots XU, WENBO
 Durham E-Theses Development of Collaborative SLAM Algorithm for Team of Robots XU, WENBO How to cite: XU, WENBO (2014) Development of Collaborative SLAM Algorithm for Team of Robots, Durham theses, Durham
Durham E-Theses Development of Collaborative SLAM Algorithm for Team of Robots XU, WENBO How to cite: XU, WENBO (2014) Development of Collaborative SLAM Algorithm for Team of Robots, Durham theses, Durham
Lecture information. Intelligent Robotics Mobile robotic technology. Description of our seminar. Content of this course
 Intelligent Robotics Mobile robotic technology Lecturer Houxiang Zhang TAMS, Department of Informatics, Germany http://sied.dis.uniroma1.it/ssrr07/ Lecture information Class Schedule: Seminar Intelligent
Intelligent Robotics Mobile robotic technology Lecturer Houxiang Zhang TAMS, Department of Informatics, Germany http://sied.dis.uniroma1.it/ssrr07/ Lecture information Class Schedule: Seminar Intelligent
An Experimental Comparison of Localization Methods
 An Experimental Comparison of Localization Methods Jens-Steffen Gutmann 1 Wolfram Burgard 2 Dieter Fox 2 Kurt Konolige 3 1 Institut für Informatik 2 Institut für Informatik III 3 SRI International Universität
An Experimental Comparison of Localization Methods Jens-Steffen Gutmann 1 Wolfram Burgard 2 Dieter Fox 2 Kurt Konolige 3 1 Institut für Informatik 2 Institut für Informatik III 3 SRI International Universität
COMP5121 Mobile Robots
 COMP5121 Mobile Robots Foundations Dr. Mario Gongora mgongora@dmu.ac.uk Overview Basics agents, simulation and intelligence Robots components tasks general purpose robots? Environments structured unstructured
COMP5121 Mobile Robots Foundations Dr. Mario Gongora mgongora@dmu.ac.uk Overview Basics agents, simulation and intelligence Robots components tasks general purpose robots? Environments structured unstructured
Human-robot relation. Human-robot relation
 Town Robot { Toward social interaction technologies of robot systems { Hiroshi ISHIGURO and Katsumi KIMOTO Department of Information Science Kyoto University Sakyo-ku, Kyoto 606-01, JAPAN Email: ishiguro@kuis.kyoto-u.ac.jp
Town Robot { Toward social interaction technologies of robot systems { Hiroshi ISHIGURO and Katsumi KIMOTO Department of Information Science Kyoto University Sakyo-ku, Kyoto 606-01, JAPAN Email: ishiguro@kuis.kyoto-u.ac.jp
COOPERATIVE RELATIVE LOCALIZATION FOR MOBILE ROBOT TEAMS: AN EGO- CENTRIC APPROACH
 COOPERATIVE RELATIVE LOCALIZATION FOR MOBILE ROBOT TEAMS: AN EGO- CENTRIC APPROACH Andrew Howard, Maja J Matarić and Gaurav S. Sukhatme Robotics Research Laboratory, Computer Science Department, University
COOPERATIVE RELATIVE LOCALIZATION FOR MOBILE ROBOT TEAMS: AN EGO- CENTRIC APPROACH Andrew Howard, Maja J Matarić and Gaurav S. Sukhatme Robotics Research Laboratory, Computer Science Department, University
MSc(CompSc) List of courses offered in
 List of courses offered in") Office of the MSc Programme in Computer Science Department of Computer Science The University of Hong Kong Pokfulam Road, Hong Kong. Tel: (+852) 3917 1828 Fax: (+852) 2547 4442 Email: msccs@cs.hku.hk (The
Office of the MSc Programme in Computer Science Department of Computer Science The University of Hong Kong Pokfulam Road, Hong Kong. Tel: (+852) 3917 1828 Fax: (+852) 2547 4442 Email: msccs@cs.hku.hk (The
Research Statement MAXIM LIKHACHEV
 Research Statement MAXIM LIKHACHEV My long-term research goal is to develop a methodology for robust real-time decision-making in autonomous systems. To achieve this goal, my students and I research novel
Research Statement MAXIM LIKHACHEV My long-term research goal is to develop a methodology for robust real-time decision-making in autonomous systems. To achieve this goal, my students and I research novel
Transer Learning : Super Intelligence
 Transer Learning : Super Intelligence GIS Group Dr Narayan Panigrahi, MA Rajesh, Shibumon Alampatta, Rakesh K P of Centre for AI and Robotics, Defence Research and Development Organization, C V Raman Nagar,
Transer Learning : Super Intelligence GIS Group Dr Narayan Panigrahi, MA Rajesh, Shibumon Alampatta, Rakesh K P of Centre for AI and Robotics, Defence Research and Development Organization, C V Raman Nagar,