Announcements. HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. to me.
|
|
|
- Brook Ray
- 6 years ago
- Views:
Transcription
1 Announcements HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. to me. Quiz 4 : OPTIONAL: Take home quiz, open book. If you re happy with your quiz grades so far, you don t have to take it. (Grades from the four quizzes will be averaged.) Assigned Wednesday, Nov. 30; due Friday, Dec. 2 by 5pm. ( or hand in to me.) Quiz could cover any material from previous quizzes. Quiz is designed to take you one hour maximum (but you have can work on it for as much time as you want, till Friday, 5pm). 1
2 Topics we covered Turing Test Uninformed search Methods Completeness, optimality Time complexity Informed search Heuristics Admissibility of heuristics A* search 2
3 Game-playing Notion of a game tree, ply Evaluation function Minimax Alpha-Beta pruning Natural-Language Processing N-grams Naïve Bayes for text classification Support Vector Machines for text classification Latent semantic analysis Watson question-answering system Machine translation 3
4 Speech Recognition Basic components of speech-recognition system Perceptrons and Neural Networks Perceptron learning and classification Multilayer perceptron learning and classification Genetic Algorithms Basic components of a GA Effects of parameter settings Vision Content-Based Image Retrieval Object Recogition 4
5 Analogy-Making Basic components of Copycat, as described in the slides and reading Robotics Robotic Cars (as described in the reading) Social Robotics (as described in the reading) 5
6 Reading for this week (links on the class website) S. Thrun, Toward Robotic Cars C. Breazeal, Toward Sociable Robotics R. Kurzweil, The Singularity is Near: Book Precis D. McDermott, Kurzweil's argument for the success of AI 6
7 Robotic Cars

8 From S. Thrun, Towards Robotic Cars 8
9 Examples of Components of Stanley / Junior Localization: Where am I? Establish correspondence between car s present location and a map. GPS does part of this but can have estimation error of > 1 m. To get better localization, relate features visible in laser scans to map features. 9

10 Examples of Components of Stanley / Junior Obstacles: Where are they? Static obstacles: Build occupancy grid maps 10

11 Moving obstacles: Identify with temporal differencing with sequential laser scans, and then use particle filtering to track Particle filter related to Hidden Markov Model 11

12 Particle Filters for Tracking Moving Objects From 12
13 Examples of Components of Stanley / Junior Path planning: Structured navigation (on road with lanes): Junior used a dynamic-programming-based global shortest path planner, which calculates the expected drive time to a goal location from any point in the environment. Hill climbing in this dynamic-programming function yields paths with the shortest expected travel time. 13

14 From M. Montemerlo et al., Junior: The Stanford Entry in the Urban Challenge 14
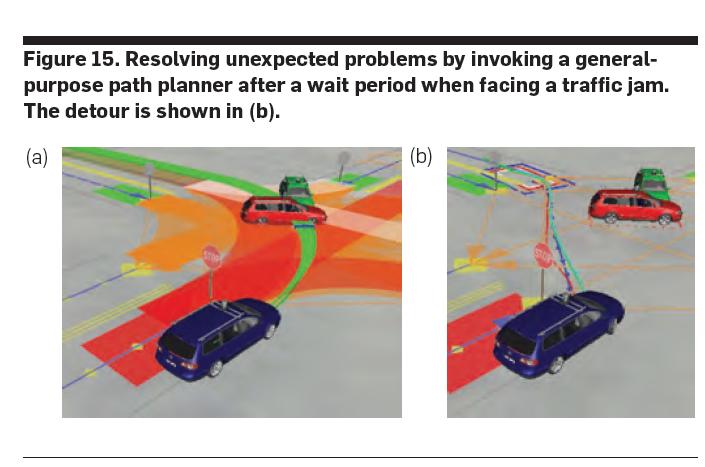
15 Examples of Components of Stanley / Junior Unstructured navigation (e.g., parking lots, u-turns) Junior used a fast, modified version of the A* algorithm. This algorithm searches shortest paths relative to the vehicle s map, using search trees. 15

16 From M. Montemerlo et al., Junior: The Stanford Entry in the Urban Challenge 16
17 Examples of Components of Stanley / Junior 17
18 18


19 New York Times: Google lobbies Nevada to allow self-driving cars 19

20 Sociable Robotics 20

21 Kismet Kismet and Rich 21
22 What can Kismet do? 22
23 What can Kismet do? Vision Visual attention Speech recognition (emotional tone) Speech production (prosody) Speech turn-taking Head and face movements Facial expression Keeping appropriate personal space 23
24 Overview and Hardware 24

25 Expressions examples 25
26 From Recognition of Affective Communicative Intent in Robot-Directed Speech C. BREAZEAL AND L. ARYANANDA Perceiving affective intent 26
27 From Recognition of Affective Communicative Intent in Robot-Directed Speech C. BREAZEAL AND L. ARYANANDA Perceiving affective intent 27

28 Perceiving affective intent 28

29 From A context-dependent attention system for a social robot C. Breazeal and B. Scassellati Vision system 29





30 From people.csail.mit.edu/paulfitz/present/social-constraints.ppt External influences on attention Weighted by behavioral relevance Current input Skin tone Color Motion Habituation Pre-attentive filters Saliency map Attention is allocated according to salience Salience can be manipulated by shaking an object, bringing it closer, moving it in front of the robot s current locus of attention, object choice, hiding distractors,

31 Vision System: Attention 31

32 From people.csail.mit.edu/paulfitz/present/social-constraints.ppt Internal influences on attention Seek toy low skin gain, high saturated-color gain Looking time 28% face, 72% block Seek face high skin gain, low color saliency gain Looking time 28% face, 72% block Internal influences bias how salience is measured The robot is not a slave to its environment

33 Attention: Gaze direction 33

34 Attention System 34
35 From people.csail.mit.edu/paulfitz/present/social-constraints.ppt Negotiating interpersonal distance Person backs off Person draws closer Too close withdrawal response Comfortable interaction distance Too far calling behavior Beyond sensor range Robot establishes a personal space through expressive cues Tunes interaction to suit its vision capabilities
36 Negotiating personal space 36
37 From people.csail.mit.edu/paulfitz/present/social-constraints.ppt Negotiating object showing Comfortable interaction speed Too fast, Too close threat response Too fast irritation response Robot conveys preferences about how objects are presented to it through irritation, threat responses Again, tunes interaction to suit its limited vision Also serves protective role

38 Negotiating object showing 38
39 Adapted from people.csail.mit.edu/paulfitz/present/social-constraints.ppt Turn-Taking Cornerstone of human-style communication, learning, and instruction Phases of turn cycle Listen to speaker: hold eye contact Reacquire floor: break eye contact and/or lean back a bit Speak: vocalize Hold the floor: look to the side Stop one s speaking turn: stop vocalizing and re-establish eye contact Relinquish floor: raise brows and lean forward a bit

40 Conversational turn-taking
41 Web page for all these videos: 41
42 How to evaluate Kismet? What are some applications for Kismet and its descendants? 42
43 Leonardo 43
CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes.
 CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes. Artificial Intelligence A branch of Computer Science. Examines how we can achieve intelligent
CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes. Artificial Intelligence A branch of Computer Science. Examines how we can achieve intelligent
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Introduction to Artificial Intelligence
 Introduction to Artificial Intelligence Mitch Marcus CIS521 Fall, 2017 Welcome to CIS 521 Professor: Mitch Marcus, mitch@ Levine 503 TAs: Eddie Smith, Heejin Jeong, Kevin Wang, Ming Zhang
Introduction to Artificial Intelligence Mitch Marcus CIS521 Fall, 2017 Welcome to CIS 521 Professor: Mitch Marcus, mitch@ Levine 503 TAs: Eddie Smith, Heejin Jeong, Kevin Wang, Ming Zhang
Intro to AI. AI is a huge field. AI is a huge field 2/19/15. What is AI. One definition:
 Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
Unit 12: Artificial Intelligence CS 101, Fall 2018
 Unit 12: Artificial Intelligence CS 101, Fall 2018 Learning Objectives After completing this unit, you should be able to: Explain the difference between procedural and declarative knowledge. Describe the
Unit 12: Artificial Intelligence CS 101, Fall 2018 Learning Objectives After completing this unit, you should be able to: Explain the difference between procedural and declarative knowledge. Describe the
Artificial Intelligence: An overview
 Artificial Intelligence: An overview Thomas Trappenberg January 4, 2009 Based on the slides provided by Russell and Norvig, Chapter 1 & 2 What is AI? Systems that think like humans Systems that act like
Artificial Intelligence: An overview Thomas Trappenberg January 4, 2009 Based on the slides provided by Russell and Norvig, Chapter 1 & 2 What is AI? Systems that think like humans Systems that act like
CSE 473 Artificial Intelligence (AI) Outline
 Outline") CSE 473 Artificial Intelligence (AI) Rajesh Rao (Instructor) Ravi Kiran (TA) http://www.cs.washington.edu/473 UW CSE AI faculty Goals of this course Logistics What is AI? Examples Challenges Outline 2
CSE 473 Artificial Intelligence (AI) Rajesh Rao (Instructor) Ravi Kiran (TA) http://www.cs.washington.edu/473 UW CSE AI faculty Goals of this course Logistics What is AI? Examples Challenges Outline 2
UNIT 13A AI: Games & Search Strategies. Announcements
 UNIT 13A AI: Games & Search Strategies 1 Announcements Do not forget to nominate your favorite CA bu emailing gkesden@gmail.com, No lecture on Friday, no recitation on Thursday No office hours Wednesday,
UNIT 13A AI: Games & Search Strategies 1 Announcements Do not forget to nominate your favorite CA bu emailing gkesden@gmail.com, No lecture on Friday, no recitation on Thursday No office hours Wednesday,
Intro to AI. AI is a huge field. AI is a huge field 2/26/16. What is AI (artificial intelligence) What is AI. One definition:
 What is AI. One definition:") Intro to AI CS30 David Kauchak Spring 2016 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI (artificial intelligence) AI
Intro to AI CS30 David Kauchak Spring 2016 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI (artificial intelligence) AI
Course Info. CS 486/686 Artificial Intelligence. Outline. Artificial Intelligence (AI)
") Course Info CS 486/686 Artificial Intelligence May 2nd, 2006 University of Waterloo cs486/686 Lecture Slides (c) 2006 K. Larson and P. Poupart 1 Instructor: Pascal Poupart Email: cs486@students.cs.uwaterloo.ca
Course Info CS 486/686 Artificial Intelligence May 2nd, 2006 University of Waterloo cs486/686 Lecture Slides (c) 2006 K. Larson and P. Poupart 1 Instructor: Pascal Poupart Email: cs486@students.cs.uwaterloo.ca
CS 486/686 Artificial Intelligence
 CS 486/686 Artificial Intelligence Sept 15th, 2009 University of Waterloo cs486/686 Lecture Slides (c) 2009 K. Larson and P. Poupart 1 Course Info Instructor: Pascal Poupart Email: ppoupart@cs.uwaterloo.ca
CS 486/686 Artificial Intelligence Sept 15th, 2009 University of Waterloo cs486/686 Lecture Slides (c) 2009 K. Larson and P. Poupart 1 Course Info Instructor: Pascal Poupart Email: ppoupart@cs.uwaterloo.ca
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Lecture 1 Introduction to AI
 Lecture 1 Introduction to AI Kristóf Karacs PPKE-ITK Questions? What is intelligence? What makes it artificial? What can we use it for? How does it work? How to create it? How to control / repair / improve
Lecture 1 Introduction to AI Kristóf Karacs PPKE-ITK Questions? What is intelligence? What makes it artificial? What can we use it for? How does it work? How to create it? How to control / repair / improve
Welcome to CSC384: Intro to Artificial MAN.
 Welcome to CSC384: Intro to Artificial Intelligence!@#!, MAN. CSC384: Intro to Artificial Intelligence Winter 2014 Instructor: Prof. Sheila McIlraith Lectures/Tutorials: Monday 1-2pm WB 116 Wednesday 1-2pm
Welcome to CSC384: Intro to Artificial Intelligence!@#!, MAN. CSC384: Intro to Artificial Intelligence Winter 2014 Instructor: Prof. Sheila McIlraith Lectures/Tutorials: Monday 1-2pm WB 116 Wednesday 1-2pm
Social Constraints on Animate Vision
 Social Constraints on Animate Vision Cynthia Breazeal, Aaron Edsinger, Paul Fitzpatrick, Brian Scassellati, Paulina Varchavskaia MIT Artificial Intelligence Laboratory 545 Technology Square Cambridge,
Social Constraints on Animate Vision Cynthia Breazeal, Aaron Edsinger, Paul Fitzpatrick, Brian Scassellati, Paulina Varchavskaia MIT Artificial Intelligence Laboratory 545 Technology Square Cambridge,
What is Artificial Intelligence? Alternate Definitions (Russell + Norvig) Human intelligence
 Human intelligence") CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
WHAT THE COURSE IS AND ISN T ABOUT. Welcome to CIS 391. Introduction to Artificial Intelligence. Grading & Homework. Welcome to CIS 391
 Welcome to CIS 391 Introduction to Artificial Intelligence Lecturer: Mitch Marcus, mitch@ Levine 503 Office hours will be announced on Piazza Mitch Marcus CIS391 Fall, 2015 TA: Daniel Moroz,
Welcome to CIS 391 Introduction to Artificial Intelligence Lecturer: Mitch Marcus, mitch@ Levine 503 Office hours will be announced on Piazza Mitch Marcus CIS391 Fall, 2015 TA: Daniel Moroz,
Introduction to Mobile Robotics Welcome
 Introduction to Mobile Robotics Welcome Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Today This course Robotics in the past and today 2 Organization Wed 14:00 16:00 Fr 14:00 15:00 lectures, discussions
Introduction to Mobile Robotics Welcome Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Today This course Robotics in the past and today 2 Organization Wed 14:00 16:00 Fr 14:00 15:00 lectures, discussions
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
The Evolution of Artificial Intelligence in Workplaces
 The Evolution of Artificial Intelligence in Workplaces Cognitive Hubs for Future Workplaces In the last decade, workplaces have started to evolve towards digitalization. In the future, people will work
The Evolution of Artificial Intelligence in Workplaces Cognitive Hubs for Future Workplaces In the last decade, workplaces have started to evolve towards digitalization. In the future, people will work
A SURVEY OF SOCIALLY INTERACTIVE ROBOTS
 A SURVEY OF SOCIALLY INTERACTIVE ROBOTS Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Presented By: Mehwish Alam INTRODUCTION History of Social Robots Social Robots Socially Interactive Robots Why
A SURVEY OF SOCIALLY INTERACTIVE ROBOTS Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Presented By: Mehwish Alam INTRODUCTION History of Social Robots Social Robots Socially Interactive Robots Why
Welcome to CSC384: Intro to Artificial Intelligence
 CSC384: Intro to Artificial Intelligence Welcome to CSC384: Intro to Artificial Intelligence Instructor: Torsten Hahmann Office Hour: Wednesday 6:00 7:00 pm, BA2200 tentative, starting Sept. 21 Lectures/Tutorials:
CSC384: Intro to Artificial Intelligence Welcome to CSC384: Intro to Artificial Intelligence Instructor: Torsten Hahmann Office Hour: Wednesday 6:00 7:00 pm, BA2200 tentative, starting Sept. 21 Lectures/Tutorials:
CS 1571 Introduction to AI Lecture 12. Adversarial search. CS 1571 Intro to AI. Announcements
 CS 171 Introduction to AI Lecture 1 Adversarial search Milos Hauskrecht milos@cs.pitt.edu 39 Sennott Square Announcements Homework assignment is out Programming and experiments Simulated annealing + Genetic
CS 171 Introduction to AI Lecture 1 Adversarial search Milos Hauskrecht milos@cs.pitt.edu 39 Sennott Square Announcements Homework assignment is out Programming and experiments Simulated annealing + Genetic
Prof Trivedi ECE253A Notes for Students only
 ECE 253A: Digital Processing: Course Related Class Website: https://sites.google.com/a/eng.ucsd.edu/ece253fall2017/ Course Graduate Assistants: Nachiket Deo Borhan Vasili Kirill Pirozenko Piazza Grading:
ECE 253A: Digital Processing: Course Related Class Website: https://sites.google.com/a/eng.ucsd.edu/ece253fall2017/ Course Graduate Assistants: Nachiket Deo Borhan Vasili Kirill Pirozenko Piazza Grading:
Introduction and History of AI
 15-780 Introduction and History of AI J. Zico Kolter January 13, 2014 1 What is AI? 2 Some classic definitions Buildings computers that... Think like humans Act like humans Think rationally Act rationally
15-780 Introduction and History of AI J. Zico Kolter January 13, 2014 1 What is AI? 2 Some classic definitions Buildings computers that... Think like humans Act like humans Think rationally Act rationally
ME 597/780 AUTONOMOUS MOBILE ROBOTICS SECTION 1: INTRODUCTION
 ME 597/780 AUTONOMOUS MOBILE ROBOTICS SECTION 1: INTRODUCTION Prof. Steven Waslander SYLLABUS Contact Info: Prof. Steven Waslander E3X-4118 (519) 888-4567 x32205 stevenw@uwaterloo.ca Michael Smart E5-3012
ME 597/780 AUTONOMOUS MOBILE ROBOTICS SECTION 1: INTRODUCTION Prof. Steven Waslander SYLLABUS Contact Info: Prof. Steven Waslander E3X-4118 (519) 888-4567 x32205 stevenw@uwaterloo.ca Michael Smart E5-3012
CS325 Artificial Intelligence Ch. 5, Games!
 CS325 Artificial Intelligence Ch. 5, Games! Cengiz Günay, Emory Univ. vs. Spring 2013 Günay Ch. 5, Games! Spring 2013 1 / 19 AI in Games A lot of work is done on it. Why? Günay Ch. 5, Games! Spring 2013
CS325 Artificial Intelligence Ch. 5, Games! Cengiz Günay, Emory Univ. vs. Spring 2013 Günay Ch. 5, Games! Spring 2013 1 / 19 AI in Games A lot of work is done on it. Why? Günay Ch. 5, Games! Spring 2013
LECTURE 1: OVERVIEW. CS 4100: Foundations of AI. Instructor: Robert Platt. (some slides from Chris Amato, Magy Seif El-Nasr, and Stacy Marsella)
") LECTURE 1: OVERVIEW CS 4100: Foundations of AI Instructor: Robert Platt (some slides from Chris Amato, Magy Seif El-Nasr, and Stacy Marsella) SOME LOGISTICS Class webpage: http://www.ccs.neu.edu/home/rplatt/cs4100_spring2018/index.html
LECTURE 1: OVERVIEW CS 4100: Foundations of AI Instructor: Robert Platt (some slides from Chris Amato, Magy Seif El-Nasr, and Stacy Marsella) SOME LOGISTICS Class webpage: http://www.ccs.neu.edu/home/rplatt/cs4100_spring2018/index.html
Research Seminar. Stefano CARRINO fr.ch
 Research Seminar Stefano CARRINO stefano.carrino@hefr.ch http://aramis.project.eia- fr.ch 26.03.2010 - based interaction Characterization Recognition Typical approach Design challenges, advantages, drawbacks
Research Seminar Stefano CARRINO stefano.carrino@hefr.ch http://aramis.project.eia- fr.ch 26.03.2010 - based interaction Characterization Recognition Typical approach Design challenges, advantages, drawbacks
CS 730/830: Intro AI. Prof. Wheeler Ruml. TA Bence Cserna. Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1
 CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
Robots Leaving the Production Halls Opportunities and Challenges
 Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
Shaping the future Robots Leaving the Production Halls Opportunities and Challenges Prof. Dr. Roland Siegwart www.asl.ethz.ch www.wysszurich.ch APAC INNOVATION SUMMIT 17 Hong Kong Science Park Science,
ARTIFICIAL INTELLIGENCE
 BABEŞ-BOLYAI UNIVERSITY Faculty of Computer Science and Mathematics ARTIFICIAL INTELLIGENCE Introduction Summary Short questions about AI History of AI Applications of AI 2 Short questions about AI What
BABEŞ-BOLYAI UNIVERSITY Faculty of Computer Science and Mathematics ARTIFICIAL INTELLIGENCE Introduction Summary Short questions about AI History of AI Applications of AI 2 Short questions about AI What
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
What's involved in Intelligence?
 AI Methodology Theoretical aspects Mathematical formalizations, properties, algorithms Engineering aspects The act of building (useful) machines Empirical science Experiments What's involved in Intelligence?
AI Methodology Theoretical aspects Mathematical formalizations, properties, algorithms Engineering aspects The act of building (useful) machines Empirical science Experiments What's involved in Intelligence?
By Marek Perkowski ECE Seminar, Friday January 26, 2001
 By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
Following Dirt Roads at Night-Time
 Following Dirt Roads at Night-Time Sensors and Features for Lane Recognition and Tracking Sebastian F. X. Bayerl Thorsten Luettel Hans-Joachim Wuensche Autonomous Systems Technology (TAS) Department of
Following Dirt Roads at Night-Time Sensors and Features for Lane Recognition and Tracking Sebastian F. X. Bayerl Thorsten Luettel Hans-Joachim Wuensche Autonomous Systems Technology (TAS) Department of
6.034 Quiz 1 October 13, 2005
 6.034 Quiz 1 October 13, 2005 Name EMail Problem number 1 2 3 Total Maximum 35 35 30 100 Score Grader 1 Question 1: Rule-based reasoning (35 points) Mike Carthy decides to use his 6.034 knowledge to take
6.034 Quiz 1 October 13, 2005 Name EMail Problem number 1 2 3 Total Maximum 35 35 30 100 Score Grader 1 Question 1: Rule-based reasoning (35 points) Mike Carthy decides to use his 6.034 knowledge to take
ENHANCED HUMAN-AGENT INTERACTION: AUGMENTING INTERACTION MODELS WITH EMBODIED AGENTS BY SERAFIN BENTO. MASTER OF SCIENCE in INFORMATION SYSTEMS
 BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
Contents 1 Introduction Optical Character Recognition Systems Soft Computing Techniques for Optical Character Recognition Systems
 Contents 1 Introduction.... 1 1.1 Organization of the Monograph.... 1 1.2 Notation.... 3 1.3 State of Art.... 4 1.4 Research Issues and Challenges.... 5 1.5 Figures.... 5 1.6 MATLAB OCR Toolbox.... 5 References....
Contents 1 Introduction.... 1 1.1 Organization of the Monograph.... 1 1.2 Notation.... 3 1.3 State of Art.... 4 1.4 Research Issues and Challenges.... 5 1.5 Figures.... 5 1.6 MATLAB OCR Toolbox.... 5 References....
CS 343: Artificial Intelligence
 CS 343: Artificial Intelligence NLP, Games, and Autonomous Vehicles Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro to AI
CS 343: Artificial Intelligence NLP, Games, and Autonomous Vehicles Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro to AI
CMSC 372 Artificial Intelligence. Fall Administrivia
 CMSC 372 Artificial Intelligence Fall 2017 Administrivia Instructor: Deepak Kumar Lectures: Mon& Wed 10:10a to 11:30a Labs: Fridays 10:10a to 11:30a Pre requisites: CMSC B206 or H106 and CMSC B231 or permission
CMSC 372 Artificial Intelligence Fall 2017 Administrivia Instructor: Deepak Kumar Lectures: Mon& Wed 10:10a to 11:30a Labs: Fridays 10:10a to 11:30a Pre requisites: CMSC B206 or H106 and CMSC B231 or permission
Building Perceptive Robots with INTEL Euclid Development kit
 Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
YDDON. Humans, Robots, & Intelligent Objects New communication approaches
 YDDON Humans, Robots, & Intelligent Objects New communication approaches Building Robot intelligence Interdisciplinarity Turning things into robots www.ydrobotics.co m Edifício A Moagem Cidade do Engenho
YDDON Humans, Robots, & Intelligent Objects New communication approaches Building Robot intelligence Interdisciplinarity Turning things into robots www.ydrobotics.co m Edifício A Moagem Cidade do Engenho
COS 402 Machine Learning and Artificial Intelligence Fall Lecture 1: Intro
 COS 402 Machine Learning and Artificial Intelligence Fall 2016 Lecture 1: Intro Sanjeev Arora Elad Hazan Today s Agenda Defining intelligence and AI state-of-the-art, goals Course outline AI by introspection
COS 402 Machine Learning and Artificial Intelligence Fall 2016 Lecture 1: Intro Sanjeev Arora Elad Hazan Today s Agenda Defining intelligence and AI state-of-the-art, goals Course outline AI by introspection
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
MIN-Fakultät Fachbereich Informatik. Universität Hamburg. Socially interactive robots. Christine Upadek. 29 November Christine Upadek 1
 Christine Upadek 29 November 2010 Christine Upadek 1 Outline Emotions Kismet - a sociable robot Outlook Christine Upadek 2 Denition Social robots are embodied agents that are part of a heterogeneous group:
Christine Upadek 29 November 2010 Christine Upadek 1 Outline Emotions Kismet - a sociable robot Outlook Christine Upadek 2 Denition Social robots are embodied agents that are part of a heterogeneous group:
Comp th February Due: 11:59pm, 25th February 2014
 HomeWork Assignment 2 Comp 590.133 4th February 2014 Due: 11:59pm, 25th February 2014 Getting Started What to submit: Written parts of assignment and descriptions of the programming part of the assignment
HomeWork Assignment 2 Comp 590.133 4th February 2014 Due: 11:59pm, 25th February 2014 Getting Started What to submit: Written parts of assignment and descriptions of the programming part of the assignment
ENTRY ARTIFICIAL INTELLIGENCE
 ENTRY ARTIFICIAL INTELLIGENCE [ENTRY ARTIFICIAL INTELLIGENCE] Authors: Oliver Knill: March 2000 Literature: Peter Norvig, Paradigns of Artificial Intelligence Programming Daniel Juravsky and James Martin,
ENTRY ARTIFICIAL INTELLIGENCE [ENTRY ARTIFICIAL INTELLIGENCE] Authors: Oliver Knill: March 2000 Literature: Peter Norvig, Paradigns of Artificial Intelligence Programming Daniel Juravsky and James Martin,
Intelligent Technology for More Advanced Autonomous Driving
 FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
Saphira Robot Control Architecture
 Saphira Robot Control Architecture Saphira Version 8.1.0 Kurt Konolige SRI International April, 2002 Copyright 2002 Kurt Konolige SRI International, Menlo Park, California 1 Saphira and Aria System Overview
Saphira Robot Control Architecture Saphira Version 8.1.0 Kurt Konolige SRI International April, 2002 Copyright 2002 Kurt Konolige SRI International, Menlo Park, California 1 Saphira and Aria System Overview
CS 229 Final Project: Using Reinforcement Learning to Play Othello
 CS 229 Final Project: Using Reinforcement Learning to Play Othello Kevin Fry Frank Zheng Xianming Li ID: kfry ID: fzheng ID: xmli 16 December 2016 Abstract We built an AI that learned to play Othello.
CS 229 Final Project: Using Reinforcement Learning to Play Othello Kevin Fry Frank Zheng Xianming Li ID: kfry ID: fzheng ID: xmli 16 December 2016 Abstract We built an AI that learned to play Othello.
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
CS 540-2: Introduction to Artificial Intelligence Homework Assignment #2. Assigned: Monday, February 6 Due: Saturday, February 18
 CS 540-2: Introduction to Artificial Intelligence Homework Assignment #2 Assigned: Monday, February 6 Due: Saturday, February 18 Hand-In Instructions This assignment includes written problems and programming
CS 540-2: Introduction to Artificial Intelligence Homework Assignment #2 Assigned: Monday, February 6 Due: Saturday, February 18 Hand-In Instructions This assignment includes written problems and programming
ARTIFICIAL INTELLIGENCE
 ARTIFICIAL INTELLIGENCE ITU PRESENTS FEB. 15, 2018 WHAT IS ARTIFICIAL INTELLIGENCE? Making computers that think? The automation of activities we associate with human thinking, like decision making, learning...?
ARTIFICIAL INTELLIGENCE ITU PRESENTS FEB. 15, 2018 WHAT IS ARTIFICIAL INTELLIGENCE? Making computers that think? The automation of activities we associate with human thinking, like decision making, learning...?
CIS 849: Autonomous Robot Vision
 CIS 849: Autonomous Robot Vision Instructor: Christopher Rasmussen Course web page: www.cis.udel.edu/~cer/arv September 5, 2002 Purpose of this Course To provide an introduction to the uses of visual sensing
CIS 849: Autonomous Robot Vision Instructor: Christopher Rasmussen Course web page: www.cis.udel.edu/~cer/arv September 5, 2002 Purpose of this Course To provide an introduction to the uses of visual sensing
Humanoid Robotics (TIF 160)
") Humanoid Robotics (TIF 160) Lecture 1, 20100831 Introduction and motivation to humanoid robotics What will you learn? (Aims) Basic facts about humanoid robots Kinematics (and dynamics) of humanoid robots
Humanoid Robotics (TIF 160) Lecture 1, 20100831 Introduction and motivation to humanoid robotics What will you learn? (Aims) Basic facts about humanoid robots Kinematics (and dynamics) of humanoid robots
Overview. Pre AI developments. Birth of AI, early successes. Overwhelming optimism underwhelming results
 Help Overview Administrivia History/applications Modeling agents/environments What can we learn from the past? 1 Pre AI developments Philosophy: intelligence can be achieved via mechanical computation
Help Overview Administrivia History/applications Modeling agents/environments What can we learn from the past? 1 Pre AI developments Philosophy: intelligence can be achieved via mechanical computation
Perceptual Interfaces. Matthew Turk s (UCSB) and George G. Robertson s (Microsoft Research) slides on perceptual p interfaces
 and George G. Robertson s (Microsoft Research) slides on perceptual p interfaces") Perceptual Interfaces Adapted from Matthew Turk s (UCSB) and George G. Robertson s (Microsoft Research) slides on perceptual p interfaces Outline Why Perceptual Interfaces? Multimodal interfaces Vision
Perceptual Interfaces Adapted from Matthew Turk s (UCSB) and George G. Robertson s (Microsoft Research) slides on perceptual p interfaces Outline Why Perceptual Interfaces? Multimodal interfaces Vision
Jeff Bezos, CEO and Founder Amazon
 Jeff Bezos, CEO and Founder Amazon Artificial Intelligence and Machine Learning... will empower and improve every business, every government organization, every philanthropy there is not an institution
Jeff Bezos, CEO and Founder Amazon Artificial Intelligence and Machine Learning... will empower and improve every business, every government organization, every philanthropy there is not an institution
Neural Networks The New Moore s Law
 Neural Networks The New Moore s Law Chris Rowen, PhD, FIEEE CEO Cognite Ventures December 216 Outline Moore s Law Revisited: Efficiency Drives Productivity Embedded Neural Network Product Segments Efficiency
Neural Networks The New Moore s Law Chris Rowen, PhD, FIEEE CEO Cognite Ventures December 216 Outline Moore s Law Revisited: Efficiency Drives Productivity Embedded Neural Network Product Segments Efficiency
15-381: Artificial Intelligence Assignment 3: Midterm Review
 15-381: Artificial Intelligence Assignment 3: Midterm Review Handed out: Tuesday, October 2 nd, 2001 Due: Tuesday, October 9 th, 2001 (in class) Solutions will be posted October 10 th, 2001: No late homeworks
15-381: Artificial Intelligence Assignment 3: Midterm Review Handed out: Tuesday, October 2 nd, 2001 Due: Tuesday, October 9 th, 2001 (in class) Solutions will be posted October 10 th, 2001: No late homeworks
Understanding the Mechanism of Sonzai-Kan
 Understanding the Mechanism of Sonzai-Kan ATR Intelligent Robotics and Communication Laboratories Where does the Sonzai-Kan, the feeling of one's presence, such as the atmosphere, the authority, come from?
Understanding the Mechanism of Sonzai-Kan ATR Intelligent Robotics and Communication Laboratories Where does the Sonzai-Kan, the feeling of one's presence, such as the atmosphere, the authority, come from?
CSE 473 Artificial Intelligence (AI)
") CSE 473 Artificial Intelligence (AI) Rajesh Rao (Instructor) Jennifer Hanson (TA) Evan Herbst (TA) http://www.cs.washington.edu/473 Based on slides by UW CSE AI faculty, Dan Klein, Stuart Russell, Andrew
CSE 473 Artificial Intelligence (AI) Rajesh Rao (Instructor) Jennifer Hanson (TA) Evan Herbst (TA) http://www.cs.washington.edu/473 Based on slides by UW CSE AI faculty, Dan Klein, Stuart Russell, Andrew
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
History and Philosophical Underpinnings
 History and Philosophical Underpinnings Last Class Recap game-theory why normal search won t work minimax algorithm brute-force traversal of game tree for best move alpha-beta pruning how to improve on
History and Philosophical Underpinnings Last Class Recap game-theory why normal search won t work minimax algorithm brute-force traversal of game tree for best move alpha-beta pruning how to improve on
Welcome to CompSci 171 Fall 2010 Introduction to AI.
 Welcome to CompSci 171 Fall 2010 Introduction to AI. http://www.ics.uci.edu/~welling/teaching/ics171spring07/ics171fall09.html Instructor: Max Welling, welling@ics.uci.edu Office hours: Wed. 4-5pm in BH
Welcome to CompSci 171 Fall 2010 Introduction to AI. http://www.ics.uci.edu/~welling/teaching/ics171spring07/ics171fall09.html Instructor: Max Welling, welling@ics.uci.edu Office hours: Wed. 4-5pm in BH
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path
 Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
Moving Obstacle Avoidance for Mobile Robot Moving on Designated Path Taichi Yamada 1, Yeow Li Sa 1 and Akihisa Ohya 1 1 Graduate School of Systems and Information Engineering, University of Tsukuba, 1-1-1,
NLP, Games, and Robotic Cars
 NLP, Games, and Robotic Cars [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available at http://ai.berkeley.edu.] So Far: Foundational
NLP, Games, and Robotic Cars [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available at http://ai.berkeley.edu.] So Far: Foundational
A.I in Automotive? Why and When.
 A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
11/13/18. Introduction to RNNs for NLP. About Me. Overview SHANG GAO
 Introduction to RNNs for NLP SHANG GAO About Me PhD student in the Data Science and Engineering program Took Deep Learning last year Work in the Biomedical Sciences, Engineering, and Computing group at
Introduction to RNNs for NLP SHANG GAO About Me PhD student in the Data Science and Engineering program Took Deep Learning last year Work in the Biomedical Sciences, Engineering, and Computing group at
HUMAN-LEVEL ARTIFICIAL INTELIGENCE & COGNITIVE SCIENCE
 HUMAN-LEVEL ARTIFICIAL INTELIGENCE & COGNITIVE SCIENCE Nils J. Nilsson Stanford AI Lab http://ai.stanford.edu/~nilsson Symbolic Systems 100, April 15, 2008 1 OUTLINE Computation and Intelligence Approaches
HUMAN-LEVEL ARTIFICIAL INTELIGENCE & COGNITIVE SCIENCE Nils J. Nilsson Stanford AI Lab http://ai.stanford.edu/~nilsson Symbolic Systems 100, April 15, 2008 1 OUTLINE Computation and Intelligence Approaches
Course Objectives. This course gives a basic neural network architectures and learning rules.
 Introduction Course Objectives This course gives a basic neural network architectures and learning rules. Emphasis is placed on the mathematical analysis of these networks, on methods of training them
Introduction Course Objectives This course gives a basic neural network architectures and learning rules. Emphasis is placed on the mathematical analysis of these networks, on methods of training them
Path Planning as Search
 Path Planning as Search Paul Robertson 16.410 16.413 Session 7 Slides adapted from: Brian C. Williams 6.034 Tomas Lozano Perez, Winston, and Russell and Norvig AIMA 1 Assignment Remember: Online problem
Path Planning as Search Paul Robertson 16.410 16.413 Session 7 Slides adapted from: Brian C. Williams 6.034 Tomas Lozano Perez, Winston, and Russell and Norvig AIMA 1 Assignment Remember: Online problem
Artificial Intelligence: Definition
 Lecture Notes Artificial Intelligence: Definition Dae-Won Kim School of Computer Science & Engineering Chung-Ang University What are AI Systems? Deep Blue defeated the world chess champion Garry Kasparov
Lecture Notes Artificial Intelligence: Definition Dae-Won Kim School of Computer Science & Engineering Chung-Ang University What are AI Systems? Deep Blue defeated the world chess champion Garry Kasparov
International Journal of Informative & Futuristic Research ISSN (Online):
:") Reviewed Paper Volume 2 Issue 4 December 2014 International Journal of Informative & Futuristic Research ISSN (Online): 2347-1697 A Survey On Simultaneous Localization And Mapping Paper ID IJIFR/ V2/ E4/
Reviewed Paper Volume 2 Issue 4 December 2014 International Journal of Informative & Futuristic Research ISSN (Online): 2347-1697 A Survey On Simultaneous Localization And Mapping Paper ID IJIFR/ V2/ E4/
Issues in Information Systems Volume 13, Issue 2, pp , 2012
 131 A STUDY ON SMART CURRICULUM UTILIZING INTELLIGENT ROBOT SIMULATION SeonYong Hong, Korea Advanced Institute of Science and Technology, gosyhong@kaist.ac.kr YongHyun Hwang, University of California Irvine,
131 A STUDY ON SMART CURRICULUM UTILIZING INTELLIGENT ROBOT SIMULATION SeonYong Hong, Korea Advanced Institute of Science and Technology, gosyhong@kaist.ac.kr YongHyun Hwang, University of California Irvine,
Robotics and Autonomous Systems
 1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
What is AI? AI is the reproduction of human reasoning and intelligent behavior by computational methods. an attempt of. Intelligent behavior Computer
 What is AI? an attempt of AI is the reproduction of human reasoning and intelligent behavior by computational methods Intelligent behavior Computer Humans 1 What is AI? (R&N) Discipline that systematizes
What is AI? an attempt of AI is the reproduction of human reasoning and intelligent behavior by computational methods Intelligent behavior Computer Humans 1 What is AI? (R&N) Discipline that systematizes
Safe Human-Robot Co-Existence
 Safe Human-Robot Co-Existence Aaron Pereira TU München February 3, 2016 Aaron Pereira Preliminary Lecture February 3, 2016 1 / 17 Overview Course Aim (Learning Outcomes) You understand the challenges behind
Safe Human-Robot Co-Existence Aaron Pereira TU München February 3, 2016 Aaron Pereira Preliminary Lecture February 3, 2016 1 / 17 Overview Course Aim (Learning Outcomes) You understand the challenges behind
Outline. Introduction to AI. Artificial Intelligence. What is an AI? What is an AI? Agents Environments
 Outline Introduction to AI ECE457 Applied Artificial Intelligence Fall 2007 Lecture #1 What is an AI? Russell & Norvig, chapter 1 Agents s Russell & Norvig, chapter 2 ECE457 Applied Artificial Intelligence
Outline Introduction to AI ECE457 Applied Artificial Intelligence Fall 2007 Lecture #1 What is an AI? Russell & Norvig, chapter 1 Agents s Russell & Norvig, chapter 2 ECE457 Applied Artificial Intelligence
CSC 550: Introduction to Artificial Intelligence. Fall 2004
 CSC 550: Introduction to Artificial Intelligence Fall 2004 See online syllabus at: http://www.creighton.edu/~davereed/csc550 Course goals: survey the field of Artificial Intelligence, including major areas
CSC 550: Introduction to Artificial Intelligence Fall 2004 See online syllabus at: http://www.creighton.edu/~davereed/csc550 Course goals: survey the field of Artificial Intelligence, including major areas
Indiana K-12 Computer Science Standards
 Indiana K-12 Computer Science Standards What is Computer Science? Computer science is the study of computers and algorithmic processes, including their principles, their hardware and software designs,
Indiana K-12 Computer Science Standards What is Computer Science? Computer science is the study of computers and algorithmic processes, including their principles, their hardware and software designs,
CSCE 315: Programming Studio
 CSCE 315: Programming Studio Introduction to Artificial Intelligence Textbook Definitions Thinking like humans What is Intelligence Acting like humans Thinking rationally Acting rationally However, it
CSCE 315: Programming Studio Introduction to Artificial Intelligence Textbook Definitions Thinking like humans What is Intelligence Acting like humans Thinking rationally Acting rationally However, it
CSC 242 Artificial Intelligence. Henry Kautz Spring 2014
 CSC 242 Artificial Intelligence Henry Kautz Spring 2014 Welcome Instructor: Henry Kautz Chair, Computer Science Director, Institute for Data Science Past President, Association for the Advancement of Artificial
CSC 242 Artificial Intelligence Henry Kautz Spring 2014 Welcome Instructor: Henry Kautz Chair, Computer Science Director, Institute for Data Science Past President, Association for the Advancement of Artificial
CS 309: Autonomous Intelligent Robotics FRI I. Instructor: Justin Hart.
 CS 309: Autonomous Intelligent Robotics FRI I Instructor: Justin Hart http://justinhart.net/teaching/2017_fall_cs378/ Today Basic Information, Preliminaries FRI Autonomous Robots Overview Panel with the
CS 309: Autonomous Intelligent Robotics FRI I Instructor: Justin Hart http://justinhart.net/teaching/2017_fall_cs378/ Today Basic Information, Preliminaries FRI Autonomous Robots Overview Panel with the
Modeling Human-Robot Interaction for Intelligent Mobile Robotics
 Modeling Human-Robot Interaction for Intelligent Mobile Robotics Tamara E. Rogers, Jian Peng, and Saleh Zein-Sabatto College of Engineering, Technology, and Computer Science Tennessee State University
Modeling Human-Robot Interaction for Intelligent Mobile Robotics Tamara E. Rogers, Jian Peng, and Saleh Zein-Sabatto College of Engineering, Technology, and Computer Science Tennessee State University
Adversary Search. Ref: Chapter 5
 Adversary Search Ref: Chapter 5 1 Games & A.I. Easy to measure success Easy to represent states Small number of operators Comparison against humans is possible. Many games can be modeled very easily, although
Adversary Search Ref: Chapter 5 1 Games & A.I. Easy to measure success Easy to represent states Small number of operators Comparison against humans is possible. Many games can be modeled very easily, although
Adversarial Search. Human-aware Robotics. 2018/01/25 Chapter 5 in R&N 3rd Ø Announcement: Slides for this lecture are here:
 Adversarial Search 2018/01/25 Chapter 5 in R&N 3rd Ø Announcement: q Slides for this lecture are here: http://www.public.asu.edu/~yzhan442/teaching/cse471/lectures/adversarial.pdf Slides are largely based
Adversarial Search 2018/01/25 Chapter 5 in R&N 3rd Ø Announcement: q Slides for this lecture are here: http://www.public.asu.edu/~yzhan442/teaching/cse471/lectures/adversarial.pdf Slides are largely based
ROBOT CONTROL VIA DIALOGUE. Arkady Yuschenko
 158 No:13 Intelligent Information and Engineering Systems ROBOT CONTROL VIA DIALOGUE Arkady Yuschenko Abstract: The most rational mode of communication between intelligent robot and human-operator is bilateral
158 No:13 Intelligent Information and Engineering Systems ROBOT CONTROL VIA DIALOGUE Arkady Yuschenko Abstract: The most rational mode of communication between intelligent robot and human-operator is bilateral
Artificial Neural Networks. Artificial Intelligence Santa Clara, 2016
 Artificial Neural Networks Artificial Intelligence Santa Clara, 2016 Simulate the functioning of the brain Can simulate actual neurons: Computational neuroscience Can introduce simplified neurons: Neural
Artificial Neural Networks Artificial Intelligence Santa Clara, 2016 Simulate the functioning of the brain Can simulate actual neurons: Computational neuroscience Can introduce simplified neurons: Neural
What's involved in Intelligence?
 AI Methodology Theoretical aspects Mathematical formalizations, properties, algorithms Engineering aspects The act of building (useful) machines Empirical science Experiments What's involved in Intelligence?
AI Methodology Theoretical aspects Mathematical formalizations, properties, algorithms Engineering aspects The act of building (useful) machines Empirical science Experiments What's involved in Intelligence?
Hybrid architectures. IAR Lecture 6 Barbara Webb
 Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
Hybrid architectures IAR Lecture 6 Barbara Webb Behaviour Based: Conclusions But arbitrary and difficult to design emergent behaviour for a given task. Architectures do not impose strong constraints Options?
CS10 The Beauty and Joy of Computing
 CS10 The Beauty and Joy of Computing Lecture #15 Artificial Intelligence UC Berkeley EECS Lecturer SOE Dan Garcia 2011-10-24 The PRIMER-V2 robot is capable of starting from a stopped position, start riding,
CS10 The Beauty and Joy of Computing Lecture #15 Artificial Intelligence UC Berkeley EECS Lecturer SOE Dan Garcia 2011-10-24 The PRIMER-V2 robot is capable of starting from a stopped position, start riding,
Invited talk IET-Renault Workshop Autonomous Vehicles: From theory to full scale applications Novotel Paris Les Halles, June 18 th 2015
 Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
2 Focus of research and research interests
 The Reem@LaSalle 2014 Robocup@Home Team Description Chang L. Zhu 1, Roger Boldú 1, Cristina de Saint Germain 1, Sergi X. Ubach 1, Jordi Albó 1 and Sammy Pfeiffer 2 1 La Salle, Ramon Llull University, Barcelona,
The Reem@LaSalle 2014 Robocup@Home Team Description Chang L. Zhu 1, Roger Boldú 1, Cristina de Saint Germain 1, Sergi X. Ubach 1, Jordi Albó 1 and Sammy Pfeiffer 2 1 La Salle, Ramon Llull University, Barcelona,
Data-Starved Artificial Intelligence
 Data-Starved Artificial Intelligence Data-Starved Artificial Intelligence This material is based upon work supported by the Assistant Secretary of Defense for Research and Engineering under Air Force Contract
Data-Starved Artificial Intelligence Data-Starved Artificial Intelligence This material is based upon work supported by the Assistant Secretary of Defense for Research and Engineering under Air Force Contract
Natural Interaction with Social Robots
 Workshop: Natural Interaction with Social Robots Part of the Topig Group with the same name. http://homepages.stca.herts.ac.uk/~comqkd/tg-naturalinteractionwithsocialrobots.html organized by Kerstin Dautenhahn,
Workshop: Natural Interaction with Social Robots Part of the Topig Group with the same name. http://homepages.stca.herts.ac.uk/~comqkd/tg-naturalinteractionwithsocialrobots.html organized by Kerstin Dautenhahn,
CS 2710 Foundations of AI. Lecture 9. Adversarial search. CS 2710 Foundations of AI. Game search
 CS 2710 Foundations of AI Lecture 9 Adversarial search Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square CS 2710 Foundations of AI Game search Game-playing programs developed by AI researchers since
CS 2710 Foundations of AI Lecture 9 Adversarial search Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square CS 2710 Foundations of AI Game search Game-playing programs developed by AI researchers since
Announcements. Homework 1. Project 1. Due tonight at 11:59pm. Due Friday 2/8 at 4:00pm. Electronic HW1 Written HW1
 Announcements Homework 1 Due tonight at 11:59pm Project 1 Electronic HW1 Written HW1 Due Friday 2/8 at 4:00pm CS 188: Artificial Intelligence Adversarial Search and Game Trees Instructors: Sergey Levine
Announcements Homework 1 Due tonight at 11:59pm Project 1 Electronic HW1 Written HW1 Due Friday 2/8 at 4:00pm CS 188: Artificial Intelligence Adversarial Search and Game Trees Instructors: Sergey Levine
EARIN Jarosław Arabas Room #223, Electronics Bldg.
 EARIN http://elektron.elka.pw.edu.pl/~jarabas/earin.html Jarosław Arabas jarabas@elka.pw.edu.pl Room #223, Electronics Bldg. Paweł Cichosz pcichosz@elka.pw.edu.pl Room #215, Electronics Bldg. EARIN Jarosław
EARIN http://elektron.elka.pw.edu.pl/~jarabas/earin.html Jarosław Arabas jarabas@elka.pw.edu.pl Room #223, Electronics Bldg. Paweł Cichosz pcichosz@elka.pw.edu.pl Room #215, Electronics Bldg. EARIN Jarosław