By Marek Perkowski ECE Seminar, Friday January 26, 2001
|
|
|
- Silas Cross
- 6 years ago
- Views:
Transcription
1 By Marek Perkowski ECE Seminar, Friday January 26, 2001
2 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming technology; to survive - Honda To protect human life - military, police, firefighting Explorers - NASA Robonaut Have fun
3 Motivation (apart from fun) Brain-building is best tried with a body All aspects of Artificial intelligence, Machine Learning, Adaptive Methods, Control, Mechatronics, surface in a realworld humanoid robot Industrial and commercial aspects usually under estimated
4 What are the Humanoid Robots good for? Helping elderly Helping disabled children Servants Hazardous conditions; cosmic research - NASA Military and police Sports (soccer, football, ping-pong, sumo, fencing, weight-lifting) Entertainment (dance, singing, theatre) Studying human body and emotions
5 First determine solution space, next how to operate in it Make the robot as unconstrained as possible, so it can work in a world designed for humans. "People are the standard for almost all interactions in our world -- tools and machines are adapted to the abilities, motion capabilities and geometry of humans."
6 SRI Report: Toward a Humanoid Robot: Artificial Intelligence and the Confluence of Technologies Although many problems currently confront roboticists and researchers of artificial intelligence, humanoid robots capable of manipulation, locomotion, and intelligence will likely become a reality. Their realization will require the confluence of a number of sensing, actuation, and control technologies, but key to intelligent humanoid robots may be cognizance.
7 SRI Report: A cognizant robot will learn through interaction with its environment. Yet even with the most favorable research outcomes, humanoid robots will see commercialization only if they can serve in practical applications and if they can find consumer acceptance. In the next 25 to 30 years, humanoid robots could perform roles as diverse as fire fighting, nuclear-reactor maintenance, security patrol, and domestic service. General-purpose robots for personal assistance and housework will follow perhaps 10 or 15 years later. When the humanoid-robotics market reaches maturity, it will likely compare in size with the automobile industry.
8

9 The most famous robot in the world

10

11

12
13

14 Kismet MIT
15

16 COG MIT

17 Rodney Brooks *Social Interaction * Tracking own hands *Kismet: face tracking, color, motion modules

18

19 High School Students at PSU

20 Spider with a camera
21 Main Stages of Practical Robot Design 1. Build the body of the robot (statics, kinematics, dynamics) 2. Select the robot architecture (evolutionary, classical, situated automata, inductive) 3. Choose the realization way for software-hardware system (microcontrollers, FPGAs, laptop, parallel PC) 4. Implement sub-systems (motor control, navigation, manipulation, vision, voice recognition, text-to-speech) 5. Integrate
22 An Evolutionary Architecture for a Humanoid robot or a Sex in the mind of a robot - or Can we use sexual breeding of thoughts?
23 Neural Darwinism The idea is not new: William James thought the same a few years after Darwin...
24 Evolutionary Approaches EAs and Genetic Programming Three Layers Reactive Model building Reasoning
25 Evolutionary Algorithms... Breeding structures, selection, variation reproduction Genetic programming breeds programs Automatic Programming Koza Darwin

26 Basic ingredients Population Selection Genetic Operators
27 Crossover Crossover implemented in hardware (FPGA) or software
28 NOT B AND A OR B AND D OR AND AND AND NOT NOT NOT B CHILD NOT B AND NOT C AND A OR B AND D A OR AND MOTHER C AND AND NOT NOT AND A NOT C NOT C OR A C A B AND NOT B D AND AND A NOT C D OR OR A B C B NOT D FATHER AND D C NOT D Example of Crossover Operation on Trees

29 GP-representation Linear structures Trees Graphs
30 Wide application field... Data Mining Prediction Information filtering Control Process modeling Natural Language Processing Signal processing Speech recognition Image processing Code optimization Data compression Quality modeling
31 Main idea: not precise+adaptive

32 Control Architecture Reactive Control Model Building Reasoning
33 Reactive control GP SYSTEM Genetic Operators robot Selection Population
34 Model building Learning Goodness mapping Searches this model for best action Two versions model complete goodness model only pleasure in goodness
35 Genetic Reasoning Evolving statements, rules and the truth Evolution as inference engine Less Heuristics Complete search and replace inference
36 Evolution on two levels Low level evolution of instincts mostly offline High level evolution of plans and facts
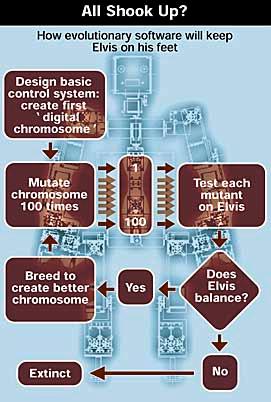
37 IT TAKES HUMANS A YEAR or so to learn to stand and walk on two legs, but a Swedish robot called Elvis might do it in a matter of weeks. If Elvis, a 40-centimetre-tall humanoid, manages to stand at all, it will be a remarkable feat. Designing robots that can balance well has proved to be extremely difficult. So rather than trying to do it themselves, Elvis's creators plan to let "evolutionary" software do all the hard work. The researchers, at Gothenborg University in Sweden, plan to use algorithms that mimic genetic mutation to "breed" the robot's control systems by natural selection. They hope this will let Elvis not only stand but also walk, navigate and perceive the world--all without anyone knowing exactly how it does it.
38
39 Contribution Uniform approach Learning all control Light geometrically consistent platform Very fast machine code on low level, very powerful reasoning on high level
CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS
 CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS GARY B. PARKER, CONNECTICUT COLLEGE, USA, parker@conncoll.edu IVO I. PARASHKEVOV, CONNECTICUT COLLEGE, USA, iipar@conncoll.edu H. JOSEPH
CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS GARY B. PARKER, CONNECTICUT COLLEGE, USA, parker@conncoll.edu IVO I. PARASHKEVOV, CONNECTICUT COLLEGE, USA, iipar@conncoll.edu H. JOSEPH
Evolutionary robotics Jørgen Nordmoen
 INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
PSU Centaur Hexapod Project
 PSU Centaur Hexapod Project Integrate an advanced robot that will be new in comparison with all robots in the world Reasoning by analogy Learning using Logic Synthesis methods Learning using Data Mining
PSU Centaur Hexapod Project Integrate an advanced robot that will be new in comparison with all robots in the world Reasoning by analogy Learning using Logic Synthesis methods Learning using Data Mining
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
RoboCup. Presented by Shane Murphy April 24, 2003
 RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
Embodiment from Engineer s Point of View
 New Trends in CS Embodiment from Engineer s Point of View Andrej Lúčny Department of Applied Informatics FMFI UK Bratislava lucny@fmph.uniba.sk www.microstep-mis.com/~andy 1 Cognitivism Cognitivism is
New Trends in CS Embodiment from Engineer s Point of View Andrej Lúčny Department of Applied Informatics FMFI UK Bratislava lucny@fmph.uniba.sk www.microstep-mis.com/~andy 1 Cognitivism Cognitivism is
Learning a Visual Task by Genetic Programming
 Learning a Visual Task by Genetic Programming Prabhas Chongstitvatana and Jumpol Polvichai Department of computer engineering Chulalongkorn University Bangkok 10330, Thailand fengpjs@chulkn.car.chula.ac.th
Learning a Visual Task by Genetic Programming Prabhas Chongstitvatana and Jumpol Polvichai Department of computer engineering Chulalongkorn University Bangkok 10330, Thailand fengpjs@chulkn.car.chula.ac.th
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future
 RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
Application Areas of AI Artificial intelligence is divided into different branches which are mentioned below:
 Week 2 - o Expert Systems o Natural Language Processing (NLP) o Computer Vision o Speech Recognition And Generation o Robotics o Neural Network o Virtual Reality APPLICATION AREAS OF ARTIFICIAL INTELLIGENCE
Week 2 - o Expert Systems o Natural Language Processing (NLP) o Computer Vision o Speech Recognition And Generation o Robotics o Neural Network o Virtual Reality APPLICATION AREAS OF ARTIFICIAL INTELLIGENCE
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
GENETIC PROGRAMMING. In artificial intelligence, genetic programming (GP) is an evolutionary algorithmbased
 is an evolutionary algorithmbased") GENETIC PROGRAMMING Definition In artificial intelligence, genetic programming (GP) is an evolutionary algorithmbased methodology inspired by biological evolution to find computer programs that perform
GENETIC PROGRAMMING Definition In artificial intelligence, genetic programming (GP) is an evolutionary algorithmbased methodology inspired by biological evolution to find computer programs that perform
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Evolutionary Computation and Machine Intelligence
 Evolutionary Computation and Machine Intelligence Prabhas Chongstitvatana Chulalongkorn University necsec 2005 1 What is Evolutionary Computation What is Machine Intelligence How EC works Learning Robotics
Evolutionary Computation and Machine Intelligence Prabhas Chongstitvatana Chulalongkorn University necsec 2005 1 What is Evolutionary Computation What is Machine Intelligence How EC works Learning Robotics
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
SWARM INTELLIGENCE. Mario Pavone Department of Mathematics & Computer Science University of Catania
 Worker Ant #1: I'm lost! Where's the line? What do I do? Worker Ant #2: Help! Worker Ant #3: We'll be stuck here forever! Mr. Soil: Do not panic, do not panic. We are trained professionals. Now, stay calm.
Worker Ant #1: I'm lost! Where's the line? What do I do? Worker Ant #2: Help! Worker Ant #3: We'll be stuck here forever! Mr. Soil: Do not panic, do not panic. We are trained professionals. Now, stay calm.
Lecture 23: Robotics. Instructor: Joelle Pineau Class web page: What is a robot?
 COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
How the Body Shapes the Way We Think
 How the Body Shapes the Way We Think A New View of Intelligence Rolf Pfeifer and Josh Bongard with a contribution by Simon Grand Foreword by Rodney Brooks Illustrations by Shun Iwasawa A Bradford Book
How the Body Shapes the Way We Think A New View of Intelligence Rolf Pfeifer and Josh Bongard with a contribution by Simon Grand Foreword by Rodney Brooks Illustrations by Shun Iwasawa A Bradford Book
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
Reactive Planning with Evolutionary Computation
 Reactive Planning with Evolutionary Computation Chaiwat Jassadapakorn and Prabhas Chongstitvatana Intelligent System Laboratory, Department of Computer Engineering Chulalongkorn University, Bangkok 10330,
Reactive Planning with Evolutionary Computation Chaiwat Jassadapakorn and Prabhas Chongstitvatana Intelligent System Laboratory, Department of Computer Engineering Chulalongkorn University, Bangkok 10330,
Optimizing the State Evaluation Heuristic of Abalone using Evolutionary Algorithms
 Optimizing the State Evaluation Heuristic of Abalone using Evolutionary Algorithms Benjamin Rhew December 1, 2005 1 Introduction Heuristics are used in many applications today, from speech recognition
Optimizing the State Evaluation Heuristic of Abalone using Evolutionary Algorithms Benjamin Rhew December 1, 2005 1 Introduction Heuristics are used in many applications today, from speech recognition
Russell and Norvig: an active, artificial agent. continuum of physical configurations and motions
 Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
Humanoid Robotics (TIF 160)
") Humanoid Robotics (TIF 160) Lecture 1, 20100831 Introduction and motivation to humanoid robotics What will you learn? (Aims) Basic facts about humanoid robots Kinematics (and dynamics) of humanoid robots
Humanoid Robotics (TIF 160) Lecture 1, 20100831 Introduction and motivation to humanoid robotics What will you learn? (Aims) Basic facts about humanoid robots Kinematics (and dynamics) of humanoid robots
Birth of An Intelligent Humanoid Robot in Singapore
 Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Humanoid Robots. by Julie Chambon
 Humanoid Robots by Julie Chambon 25th November 2008 Outlook Introduction Why a humanoid appearance? Particularities of humanoid Robots Utility of humanoid Robots Complexity of humanoids Humanoid projects
Humanoid Robots by Julie Chambon 25th November 2008 Outlook Introduction Why a humanoid appearance? Particularities of humanoid Robots Utility of humanoid Robots Complexity of humanoids Humanoid projects
A Divide-and-Conquer Approach to Evolvable Hardware
 A Divide-and-Conquer Approach to Evolvable Hardware Jim Torresen Department of Informatics, University of Oslo, PO Box 1080 Blindern N-0316 Oslo, Norway E-mail: jimtoer@idi.ntnu.no Abstract. Evolvable
A Divide-and-Conquer Approach to Evolvable Hardware Jim Torresen Department of Informatics, University of Oslo, PO Box 1080 Blindern N-0316 Oslo, Norway E-mail: jimtoer@idi.ntnu.no Abstract. Evolvable
ATLAS. High Mobility, Humanoid Robot ROBOT 17 ALLSTARS -
 ATLAS High Mobility, Humanoid Robot Position: High Mobility, Humanoid Robot ATLAS Coach: Marc Raibert Stats: High mobility, humanoid robot designed to negotiate outdoor, rough terrain; Atlas can walk bipedally,
ATLAS High Mobility, Humanoid Robot Position: High Mobility, Humanoid Robot ATLAS Coach: Marc Raibert Stats: High mobility, humanoid robot designed to negotiate outdoor, rough terrain; Atlas can walk bipedally,
Future Intelligent Machines
 Future Intelligent Machines TKK GIM research institute Content of the talk Introductory remarks Intelligent machines Subsystems technology and modularity Robots and biology Robots in homes Introductory
Future Intelligent Machines TKK GIM research institute Content of the talk Introductory remarks Intelligent machines Subsystems technology and modularity Robots and biology Robots in homes Introductory
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Robots: Tools or Toys? Some Answers from Biorobotics, Developmental and Entertainment Robotics. AI and Robots. A History of Robots in AI
 Robots: Tools or Toys? Some Answers from Biorobotics, Developmental and Entertainment Robotics AI and Robots Outline: Verena V. Hafner May 24, 2005 Seminar Series on Artificial Intelligence, Luxembourg
Robots: Tools or Toys? Some Answers from Biorobotics, Developmental and Entertainment Robotics AI and Robots Outline: Verena V. Hafner May 24, 2005 Seminar Series on Artificial Intelligence, Luxembourg
Korea Humanoid Robot Projects
 Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
Humanoids. Lecture Outline. RSS 2010 Lecture # 19 Una-May O Reilly. Definition and motivation. Locomotion. Why humanoids? What are humanoids?
 Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
CPS331 Lecture: Agents and Robots last revised November 18, 2016
 CPS331 Lecture: Agents and Robots last revised November 18, 2016 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
CPS331 Lecture: Agents and Robots last revised November 18, 2016 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
Developing Frogger Player Intelligence Using NEAT and a Score Driven Fitness Function
 Developing Frogger Player Intelligence Using NEAT and a Score Driven Fitness Function Davis Ancona and Jake Weiner Abstract In this report, we examine the plausibility of implementing a NEAT-based solution
Developing Frogger Player Intelligence Using NEAT and a Score Driven Fitness Function Davis Ancona and Jake Weiner Abstract In this report, we examine the plausibility of implementing a NEAT-based solution
Cambrian Intelligence: The Early History Of The New AI PDF
 Cambrian Intelligence: The Early History Of The New AI PDF Until the mid-1980s, AI researchers assumed that an intelligent system doing high-level reasoning was necessary for the coupling of perception
Cambrian Intelligence: The Early History Of The New AI PDF Until the mid-1980s, AI researchers assumed that an intelligent system doing high-level reasoning was necessary for the coupling of perception
Autonomous Mobile Robots
 Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Outline. What is AI? A brief history of AI State of the art
 Introduction to AI Outline What is AI? A brief history of AI State of the art What is AI? AI is a branch of CS with connections to psychology, linguistics, economics, Goal make artificial systems solve
Introduction to AI Outline What is AI? A brief history of AI State of the art What is AI? AI is a branch of CS with connections to psychology, linguistics, economics, Goal make artificial systems solve
Learning Behaviors for Environment Modeling by Genetic Algorithm
 Learning Behaviors for Environment Modeling by Genetic Algorithm Seiji Yamada Department of Computational Intelligence and Systems Science Interdisciplinary Graduate School of Science and Engineering Tokyo
Learning Behaviors for Environment Modeling by Genetic Algorithm Seiji Yamada Department of Computational Intelligence and Systems Science Interdisciplinary Graduate School of Science and Engineering Tokyo
EvoCAD: Evolution-Assisted Design
 EvoCAD: Evolution-Assisted Design Pablo Funes, Louis Lapat and Jordan B. Pollack Brandeis University Department of Computer Science 45 South St., Waltham MA 02454 USA Since 996 we have been conducting
EvoCAD: Evolution-Assisted Design Pablo Funes, Louis Lapat and Jordan B. Pollack Brandeis University Department of Computer Science 45 South St., Waltham MA 02454 USA Since 996 we have been conducting
GPU Computing for Cognitive Robotics
 GPU Computing for Cognitive Robotics Martin Peniak, Davide Marocco, Angelo Cangelosi GPU Technology Conference, San Jose, California, 25 March, 2014 Acknowledgements This study was financed by: EU Integrating
GPU Computing for Cognitive Robotics Martin Peniak, Davide Marocco, Angelo Cangelosi GPU Technology Conference, San Jose, California, 25 March, 2014 Acknowledgements This study was financed by: EU Integrating
Artificial Intelligence (Biologically inspired intelligent robots using artificial muscles)
") Artificial Intelligence (Biologically inspired intelligent robots using artificial muscles) B.Nandadeepa 1 Department of Computer Application, Adhiyamaan College of Engineering, Hosur- 635 109, Tamilnadu,
Artificial Intelligence (Biologically inspired intelligent robots using artificial muscles) B.Nandadeepa 1 Department of Computer Application, Adhiyamaan College of Engineering, Hosur- 635 109, Tamilnadu,
CPS331 Lecture: Agents and Robots last revised April 27, 2012
 CPS331 Lecture: Agents and Robots last revised April 27, 2012 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
CPS331 Lecture: Agents and Robots last revised April 27, 2012 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
Online Interactive Neuro-evolution
 Appears in Neural Processing Letters, 1999. Online Interactive Neuro-evolution Adrian Agogino (agogino@ece.utexas.edu) Kenneth Stanley (kstanley@cs.utexas.edu) Risto Miikkulainen (risto@cs.utexas.edu)
Appears in Neural Processing Letters, 1999. Online Interactive Neuro-evolution Adrian Agogino (agogino@ece.utexas.edu) Kenneth Stanley (kstanley@cs.utexas.edu) Risto Miikkulainen (risto@cs.utexas.edu)
Open Source Voices Interview Series Podcast, Episode 03: How Is Open Source Important to the Future of Robotics? English Transcript
 [Black text: Host, Nicole Huesman] Welcome to Open Source Voices. My name is Nicole Huesman. The robotics industry is predicted to drive incredible growth due, in part, to open source development and the
[Black text: Host, Nicole Huesman] Welcome to Open Source Voices. My name is Nicole Huesman. The robotics industry is predicted to drive incredible growth due, in part, to open source development and the
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Introduction to Genetic Algorithms
 Introduction to Genetic Algorithms Peter G. Anderson, Computer Science Department Rochester Institute of Technology, Rochester, New York anderson@cs.rit.edu http://www.cs.rit.edu/ February 2004 pg. 1 Abstract
Introduction to Genetic Algorithms Peter G. Anderson, Computer Science Department Rochester Institute of Technology, Rochester, New York anderson@cs.rit.edu http://www.cs.rit.edu/ February 2004 pg. 1 Abstract
Behavior-based robotics, and Evolutionary robotics
 Behavior-based robotics, and Evolutionary robotics Lecture 7 2008-02-12 Contents Part I: Behavior-based robotics: Generating robot behaviors. MW p. 39-52. Part II: Evolutionary robotics: Evolving basic
Behavior-based robotics, and Evolutionary robotics Lecture 7 2008-02-12 Contents Part I: Behavior-based robotics: Generating robot behaviors. MW p. 39-52. Part II: Evolutionary robotics: Evolving basic
JNTU World. Introduction to Robotics. Materials Provided by JNTU World Team. JNTU World JNTU World. Downloaded From JNTU World (http://(http://
 Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
An Evolutionary Approach to the Synthesis of Combinational Circuits
 An Evolutionary Approach to the Synthesis of Combinational Circuits Cecília Reis Institute of Engineering of Porto Polytechnic Institute of Porto Rua Dr. António Bernardino de Almeida, 4200-072 Porto Portugal
An Evolutionary Approach to the Synthesis of Combinational Circuits Cecília Reis Institute of Engineering of Porto Polytechnic Institute of Porto Rua Dr. António Bernardino de Almeida, 4200-072 Porto Portugal
Evolution of Efficient Gait with Humanoids Using Visual Feedback
 Evolution of Efficient Gait with Humanoids Using Visual Feedback Krister Wolff and Peter Nordin Department of Physical Resource Theory, Complex Systems Group Chalmers University of Technology and Göteborg
Evolution of Efficient Gait with Humanoids Using Visual Feedback Krister Wolff and Peter Nordin Department of Physical Resource Theory, Complex Systems Group Chalmers University of Technology and Göteborg
Introduction to Artificial Intelligence
 Introduction to Artificial Intelligence By Budditha Hettige Sources: Based on An Introduction to Multi-agent Systems by Michael Wooldridge, John Wiley & Sons, 2002 Artificial Intelligence A Modern Approach,
Introduction to Artificial Intelligence By Budditha Hettige Sources: Based on An Introduction to Multi-agent Systems by Michael Wooldridge, John Wiley & Sons, 2002 Artificial Intelligence A Modern Approach,
THE EFFECT OF CHANGE IN EVOLUTION PARAMETERS ON EVOLUTIONARY ROBOTS
 THE EFFECT OF CHANGE IN EVOLUTION PARAMETERS ON EVOLUTIONARY ROBOTS Shanker G R Prabhu*, Richard Seals^ University of Greenwich Dept. of Engineering Science Chatham, Kent, UK, ME4 4TB. +44 (0) 1634 88
THE EFFECT OF CHANGE IN EVOLUTION PARAMETERS ON EVOLUTIONARY ROBOTS Shanker G R Prabhu*, Richard Seals^ University of Greenwich Dept. of Engineering Science Chatham, Kent, UK, ME4 4TB. +44 (0) 1634 88
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012
 July 25 th, 2012") Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Humanoid Robotics (TIF 160)
") Humanoid Robotics (TIF 160) Lecture 1, 20090901 Introduction and motivation to humanoid robotics What will you learn? (Aims) Basic facts about humanoid robots Kinematics (and dynamics) of humanoid robots
Humanoid Robotics (TIF 160) Lecture 1, 20090901 Introduction and motivation to humanoid robotics What will you learn? (Aims) Basic facts about humanoid robots Kinematics (and dynamics) of humanoid robots
Why Humanoid Robots?*
 Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
ARTIFICIAL INTELLIGENCE Biologically inspired intelligent robots using artificial muscles
 ARTIFICIAL INTELLIGENCE Biologically inspired intelligent robots using artificial muscles AUTHORS Name: Mohammad Pyarima 10501A1935 Pvp Siddhartha institute of technology Email:pyari.mohammad@gmail.com
ARTIFICIAL INTELLIGENCE Biologically inspired intelligent robots using artificial muscles AUTHORS Name: Mohammad Pyarima 10501A1935 Pvp Siddhartha institute of technology Email:pyari.mohammad@gmail.com
Intelligent Robotic Systems. What is a Robot? Is This a Robot? Prof. Richard Voyles Department of Computer Engineering University of Denver
 Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
Evolutions of communication
 Evolutions of communication Alex Bell, Andrew Pace, and Raul Santos May 12, 2009 Abstract In this paper a experiment is presented in which two simulated robots evolved a form of communication to allow
Evolutions of communication Alex Bell, Andrew Pace, and Raul Santos May 12, 2009 Abstract In this paper a experiment is presented in which two simulated robots evolved a form of communication to allow
Genetic Programming of Autonomous Agents. Senior Project Proposal. Scott O'Dell. Advisors: Dr. Joel Schipper and Dr. Arnold Patton
 Genetic Programming of Autonomous Agents Senior Project Proposal Scott O'Dell Advisors: Dr. Joel Schipper and Dr. Arnold Patton December 9, 2010 GPAA 1 Introduction to Genetic Programming Genetic programming
Genetic Programming of Autonomous Agents Senior Project Proposal Scott O'Dell Advisors: Dr. Joel Schipper and Dr. Arnold Patton December 9, 2010 GPAA 1 Introduction to Genetic Programming Genetic programming
What is Artificial Intelligence? Alternate Definitions (Russell + Norvig) Human intelligence
 Human intelligence") CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
Submitted November 19, 1989 to 2nd Conference Economics and Artificial Intelligence, July 2-6, 1990, Paris
 1 Submitted November 19, 1989 to 2nd Conference Economics and Artificial Intelligence, July 2-6, 1990, Paris DISCOVERING AN ECONOMETRIC MODEL BY. GENETIC BREEDING OF A POPULATION OF MATHEMATICAL FUNCTIONS
1 Submitted November 19, 1989 to 2nd Conference Economics and Artificial Intelligence, July 2-6, 1990, Paris DISCOVERING AN ECONOMETRIC MODEL BY. GENETIC BREEDING OF A POPULATION OF MATHEMATICAL FUNCTIONS
CONTACT: , ROBOTIC BASED PROJECTS
 ROBOTIC BASED PROJECTS 1. ADVANCED ROBOTIC PICK AND PLACE ARM AND HAND SYSTEM 2. AN ARTIFICIAL LAND MARK DESIGN BASED ON MOBILE ROBOT LOCALIZATION AND NAVIGATION 3. ANDROID PHONE ACCELEROMETER SENSOR BASED
ROBOTIC BASED PROJECTS 1. ADVANCED ROBOTIC PICK AND PLACE ARM AND HAND SYSTEM 2. AN ARTIFICIAL LAND MARK DESIGN BASED ON MOBILE ROBOT LOCALIZATION AND NAVIGATION 3. ANDROID PHONE ACCELEROMETER SENSOR BASED
Keywords: Multi-robot adversarial environments, real-time autonomous robots
 ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
RoboPatriots: George Mason University 2010 RoboCup Team
 RoboPatriots: George Mason University 2010 RoboCup Team Keith Sullivan, Christopher Vo, Sean Luke, and Jyh-Ming Lien Department of Computer Science, George Mason University 4400 University Drive MSN 4A5,
RoboPatriots: George Mason University 2010 RoboCup Team Keith Sullivan, Christopher Vo, Sean Luke, and Jyh-Ming Lien Department of Computer Science, George Mason University 4400 University Drive MSN 4A5,
Robotic Systems ECE 401RB Fall 2007
 The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
Artificial Intelligence for Games
 Artificial Intelligence for Games CSC404: Video Game Design Elias Adum Let s talk about AI Artificial Intelligence AI is the field of creating intelligent behaviour in machines. Intelligence understood
Artificial Intelligence for Games CSC404: Video Game Design Elias Adum Let s talk about AI Artificial Intelligence AI is the field of creating intelligent behaviour in machines. Intelligence understood
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
CS10 The Beauty and Joy of Computing
 CS10 The Beauty and Joy of Computing Lecture #15 Artificial Intelligence UC Berkeley EECS Lecturer SOE Dan Garcia 2011-10-24 The PRIMER-V2 robot is capable of starting from a stopped position, start riding,
CS10 The Beauty and Joy of Computing Lecture #15 Artificial Intelligence UC Berkeley EECS Lecturer SOE Dan Garcia 2011-10-24 The PRIMER-V2 robot is capable of starting from a stopped position, start riding,
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Announcements. HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. to me.
 assignment. Assigned today; Due Friday, Dec. 9. to me.") Announcements HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. E-mail to me. Quiz 4 : OPTIONAL: Take home quiz, open book. If you re happy with your quiz grades so far, you
Announcements HW 6: Written (not programming) assignment. Assigned today; Due Friday, Dec. 9. E-mail to me. Quiz 4 : OPTIONAL: Take home quiz, open book. If you re happy with your quiz grades so far, you
Goals of this Course. CSE 473 Artificial Intelligence. AI as Science. AI as Engineering. Dieter Fox Colin Zheng
 CSE 473 Artificial Intelligence Dieter Fox Colin Zheng www.cs.washington.edu/education/courses/cse473/08au Goals of this Course To introduce you to a set of key: Paradigms & Techniques Teach you to identify
CSE 473 Artificial Intelligence Dieter Fox Colin Zheng www.cs.washington.edu/education/courses/cse473/08au Goals of this Course To introduce you to a set of key: Paradigms & Techniques Teach you to identify
CSE 473 Artificial Intelligence (AI)
") CSE 473 Artificial Intelligence (AI) Rajesh Rao (Instructor) Jennifer Hanson (TA) Evan Herbst (TA) http://www.cs.washington.edu/473 Based on slides by UW CSE AI faculty, Dan Klein, Stuart Russell, Andrew
CSE 473 Artificial Intelligence (AI) Rajesh Rao (Instructor) Jennifer Hanson (TA) Evan Herbst (TA) http://www.cs.washington.edu/473 Based on slides by UW CSE AI faculty, Dan Klein, Stuart Russell, Andrew
CMSC 372 Artificial Intelligence. Fall Administrivia
 CMSC 372 Artificial Intelligence Fall 2017 Administrivia Instructor: Deepak Kumar Lectures: Mon& Wed 10:10a to 11:30a Labs: Fridays 10:10a to 11:30a Pre requisites: CMSC B206 or H106 and CMSC B231 or permission
CMSC 372 Artificial Intelligence Fall 2017 Administrivia Instructor: Deepak Kumar Lectures: Mon& Wed 10:10a to 11:30a Labs: Fridays 10:10a to 11:30a Pre requisites: CMSC B206 or H106 and CMSC B231 or permission
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
What is AI? AI is the reproduction of human reasoning and intelligent behavior by computational methods. an attempt of. Intelligent behavior Computer
 What is AI? an attempt of AI is the reproduction of human reasoning and intelligent behavior by computational methods Intelligent behavior Computer Humans 1 What is AI? (R&N) Discipline that systematizes
What is AI? an attempt of AI is the reproduction of human reasoning and intelligent behavior by computational methods Intelligent behavior Computer Humans 1 What is AI? (R&N) Discipline that systematizes
Biomimetic Design of Actuators, Sensors and Robots
 Biomimetic Design of Actuators, Sensors and Robots Takashi Maeno, COE Member of autonomous-cooperative robotics group Department of Mechanical Engineering Keio University Abstract Biological life has greatly
Biomimetic Design of Actuators, Sensors and Robots Takashi Maeno, COE Member of autonomous-cooperative robotics group Department of Mechanical Engineering Keio University Abstract Biological life has greatly
Intro to AI. AI is a huge field. AI is a huge field 2/26/16. What is AI (artificial intelligence) What is AI. One definition:
 What is AI. One definition:") Intro to AI CS30 David Kauchak Spring 2016 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI (artificial intelligence) AI
Intro to AI CS30 David Kauchak Spring 2016 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI (artificial intelligence) AI
FalconBots RoboCup Humanoid Kid -Size 2014 Team Description Paper. Minero, V., Juárez, J.C., Arenas, D. U., Quiroz, J., Flores, J.A.
 FalconBots RoboCup Humanoid Kid -Size 2014 Team Description Paper Minero, V., Juárez, J.C., Arenas, D. U., Quiroz, J., Flores, J.A. Robotics Application Workshop, Instituto Tecnológico Superior de San
FalconBots RoboCup Humanoid Kid -Size 2014 Team Description Paper Minero, V., Juárez, J.C., Arenas, D. U., Quiroz, J., Flores, J.A. Robotics Application Workshop, Instituto Tecnológico Superior de San
GA-based Learning in Behaviour Based Robotics
 Proceedings of IEEE International Symposium on Computational Intelligence in Robotics and Automation, Kobe, Japan, 16-20 July 2003 GA-based Learning in Behaviour Based Robotics Dongbing Gu, Huosheng Hu,
Proceedings of IEEE International Symposium on Computational Intelligence in Robotics and Automation, Kobe, Japan, 16-20 July 2003 GA-based Learning in Behaviour Based Robotics Dongbing Gu, Huosheng Hu,
STIMULATIVE MECHANISM FOR CREATIVE THINKING
 STIMULATIVE MECHANISM FOR CREATIVE THINKING Chang, Ming-Luen¹ and Lee, Ji-Hyun 2 ¹Graduate School of Computational Design, National Yunlin University of Science and Technology, Taiwan, R.O.C., g9434703@yuntech.edu.tw
STIMULATIVE MECHANISM FOR CREATIVE THINKING Chang, Ming-Luen¹ and Lee, Ji-Hyun 2 ¹Graduate School of Computational Design, National Yunlin University of Science and Technology, Taiwan, R.O.C., g9434703@yuntech.edu.tw
Space Research expeditions and open space work. Education & Research Teaching and laboratory facilities. Medical Assistance for people
 Space Research expeditions and open space work Education & Research Teaching and laboratory facilities. Medical Assistance for people Safety Life saving activity, guarding Military Use to execute missions
Space Research expeditions and open space work Education & Research Teaching and laboratory facilities. Medical Assistance for people Safety Life saving activity, guarding Military Use to execute missions
Intro to AI. AI is a huge field. AI is a huge field 2/19/15. What is AI. One definition:
 Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
Intro to AI CS30 David Kauchak Spring 2015 http://www.bbspot.com/comics/pc-weenies/2008/02/3248.php Adapted from notes from: Sara Owsley Sood AI is a huge field What is AI AI is a huge field What is AI
MTRX 4700 : Experimental Robotics
 Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
Experimental Robotics CMPUT 412. Martin Jagersand Camilo Perez
 Experimental Robotics CMPUT 412 Martin Jagersand Camilo Perez Course Questions Why study robotics? What, exactly, is robotics about? What work is involved? and other questions as well! Why Robotics? shift
Experimental Robotics CMPUT 412 Martin Jagersand Camilo Perez Course Questions Why study robotics? What, exactly, is robotics about? What work is involved? and other questions as well! Why Robotics? shift
Lecture 10: Memetic Algorithms - I. An Introduction to Meta-Heuristics, Produced by Qiangfu Zhao (Since 2012), All rights reserved
, All rights reserved") Lecture 10: Memetic Algorithms - I Lec10/1 Contents Definition of memetic algorithms Definition of memetic evolution Hybrids that are not memetic algorithms 1 st order memetic algorithms 2 nd order memetic
Lecture 10: Memetic Algorithms - I Lec10/1 Contents Definition of memetic algorithms Definition of memetic evolution Hybrids that are not memetic algorithms 1 st order memetic algorithms 2 nd order memetic
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Lecture information. Intelligent Robotics Mobile robotic technology. Description of our seminar. Content of this course
 Intelligent Robotics Mobile robotic technology Lecturer Houxiang Zhang TAMS, Department of Informatics, Germany http://sied.dis.uniroma1.it/ssrr07/ Lecture information Class Schedule: Seminar Intelligent
Intelligent Robotics Mobile robotic technology Lecturer Houxiang Zhang TAMS, Department of Informatics, Germany http://sied.dis.uniroma1.it/ssrr07/ Lecture information Class Schedule: Seminar Intelligent
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM
 CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
Adaptive Neuro-Fuzzy Controler With Genetic Training For Mobile Robot Control
 Int. J. of Computers, Communications & Control, ISSN 1841-9836, E-ISSN 1841-9844 Vol. VII (2012), No. 1 (March), pp. 135-146 Adaptive Neuro-Fuzzy Controler With Genetic Training For Mobile Robot Control
Int. J. of Computers, Communications & Control, ISSN 1841-9836, E-ISSN 1841-9844 Vol. VII (2012), No. 1 (March), pp. 135-146 Adaptive Neuro-Fuzzy Controler With Genetic Training For Mobile Robot Control
CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes.
 CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes. Artificial Intelligence A branch of Computer Science. Examines how we can achieve intelligent
CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes. Artificial Intelligence A branch of Computer Science. Examines how we can achieve intelligent
Visually Guided Errand Service for Home Robot
 ICRA 2007 Dec. 18, 2006 Visually Guided Errand Service for Home Robot Sukhan Lee Professor and Director Where I am from Current Status and Future Prospect on Service Robotics Operational industrial robots
ICRA 2007 Dec. 18, 2006 Visually Guided Errand Service for Home Robot Sukhan Lee Professor and Director Where I am from Current Status and Future Prospect on Service Robotics Operational industrial robots
CS10 The Beauty and Joy of Computing
 CS10 The Beauty and Joy of Computing Lecture #21 Artificial Intelligence UC Berkeley EECS Lecturer SOE Dan Garcia 2011-04-13 IBM s Watson is being used by researchers in Canada to provide early warnings
CS10 The Beauty and Joy of Computing Lecture #21 Artificial Intelligence UC Berkeley EECS Lecturer SOE Dan Garcia 2011-04-13 IBM s Watson is being used by researchers in Canada to provide early warnings
The Open Access Institutional Repository at Robert Gordon University
 OpenAIR@RGU The Open Access Institutional Repository at Robert Gordon University http://openair.rgu.ac.uk This is an author produced version of a paper published in Electronics World (ISSN 0959-8332) This
OpenAIR@RGU The Open Access Institutional Repository at Robert Gordon University http://openair.rgu.ac.uk This is an author produced version of a paper published in Electronics World (ISSN 0959-8332) This
Friendly AI : A Dangerous Delusion?
 Friendly AI : A Dangerous Delusion? Prof. Dr. Hugo de GARIS profhugodegaris@yahoo.com Abstract This essay claims that the notion of Friendly AI (i.e. the idea that future intelligent machines can be designed
Friendly AI : A Dangerous Delusion? Prof. Dr. Hugo de GARIS profhugodegaris@yahoo.com Abstract This essay claims that the notion of Friendly AI (i.e. the idea that future intelligent machines can be designed