Evolutionary Computation and Machine Intelligence
|
|
|
- Tyrone Osborne
- 5 years ago
- Views:
Transcription
1 Evolutionary Computation and Machine Intelligence Prabhas Chongstitvatana Chulalongkorn University necsec
2 What is Evolutionary Computation What is Machine Intelligence How EC works Learning Robotics Examples Future research 2
3 EC is a probabilistic search procedure to obtain solutions starting from a set of candidate solutions, using improving operators to "evolve" solutions. Improving operators are inspired by natural evolution. Survival of the fittest. The objective function depends on the problem. EC is not a random search. 3
4 GA pseudo code initialise population P while not terminate evaluate P by fitness function P' = selection.recombination.mutation of P P = P' terminating conditions: 1 found satisfactory solutions 2 waiting too long 4
5 Simple Genetic Algorithm represent a solution by a binary string {0,1}* selection: chance to be selected is proportional to its fitness recombination single point crossover 5
6 recombination select a cut point cut two parents, exchange parts AAAAAA AA AAAA cut at bit 2 AA AAAA exchange parts mutation single bit flip > flip at bit 4 6
7 Evolution Strategy represent solutions with real numbers GA compare to other methods indirect -- setting derivatives to 0 direct -- hill climber enumerative search them all random just keep trying simulated annealing single-point method Tabu search 7
8 What problem GA is good for? Highly multimodal functions Discrete or discontinuous functions High-dimensionality functions, including many combinatorial ones Nonlinear dependencies on parameters (interactions among parameters) -- epistasis makes it hard for others Often used for approximating solutions to NPcomplete combinatorial problems 8
9 What is Machine Intelligence?... Exactly what the computer provides is the ability not to be rigid and unthinking but, rather, to behave conditionally. That is what it means to apply knowledge to action: It means to let the action taken reflect knowledge of the situation, to be sometimes this way, sometimes that, as appropriate.... Allen Newell 9
10 What is Machine Intelligence? It is the science and engineering of making intelligent machines, especially intelligent computer programs. It is related to the similar task of using computers to understand human intelligence, but AI does not have to confine itself to methods that are biologically observable. What is intelligence? Intelligence is the computational part of the ability to achieve goals in the world. Varying kinds and degrees of intelligence occur in people, many animals and some machines. John McCarthy 10
11 Creation of machines that can "think" perception reasoning planning acting (manipulation) machine vision 11
12 Learning machine learning building hypothesis from positive and negative examples. artificial neuron networks building approximate function mapping from inputs to outputs: classification, memorisation etc. Robotics integrate sensing and action to achieve some tasks 12
13 Applications of Machine intelligence game playing speech recognition understanding natural language computer vision expert systems agent-based systems autonomous systems collaborative robots (perhaps with human) adaptive systems assistant to human (such as secretary) 13
14 EC + MI robot programming evolutionary robotics Examples evolving robot arm programs evolving programs for biped robots learning automata SET index forecasting 14
15 15
16 16
 (IF-AND e+ s- e- (IF-OR (IF-NOT w+ s+ e+) s+ e- e-)) (IF-OR (IF-NOT SEE? w- e-) w+ e+ e+)) w- (IF-OR SEE? (IF-OR e- (IF-OR (IF-OR HIT? e+ s+ e-) INC?")
17 T = { s+, s-, e+, e-, w+, w-, HIT?, SEE?, INC?, DEC?, OUT?}. F = { IF-AND, IF-OR, IF-NOT}. (IF-AND w+ w+ e+ (IF-AND (IF-NOT (IF-NOT OUT? s- w+) (IF-AND e+ s- e- (IF-OR (IF-NOT w+ s+ e+) s+ e- e-)) (IF-OR (IF-NOT SEE? w- e-) w+ e+ e+)) w- (IF-OR SEE? (IF-OR e- (IF-OR (IF-OR HIT? e+ s+ e-) INC? w- e-) s+ w+) (IF-AND (IF-NOT w- e- e-) w- w- w+) s-) e+))) 17
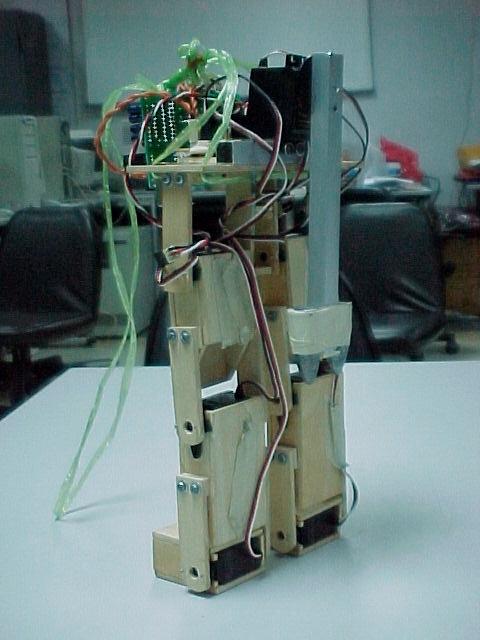
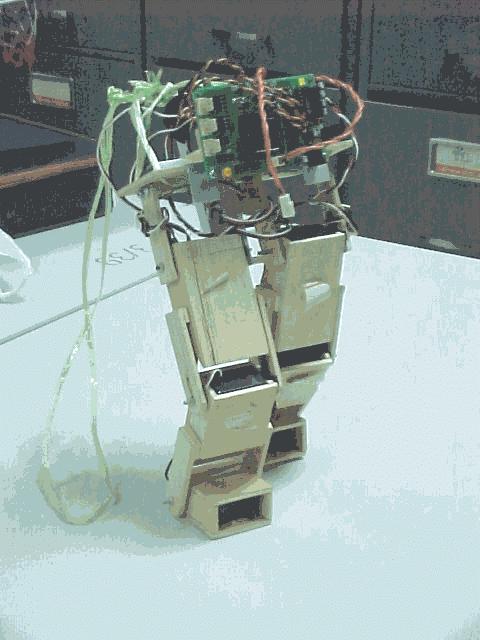
18 Fig. 3. Biped construction 18
19 Simulation Real Experiment Solution stage 1 stage 1 1 Solution 1 stage 2 stage stage 6 Solution stage 6 Final Solutions Fig. 5. Simulation + real world 19
20 Learning Automata The problem of modeling the environment, that is, assuming a robot can sense and act in the world, models the world such that we can predict the consequence of the robot's action. We conduct experiments on generating Finite State Machine from the observed sensing/action sequences. 20
21 Figure 1. Mimicking a FSM by observing its partial input/output sequences modeler target 21
22 Table 1. Description of circuits in the experiment Circuit # of input bits # of states lower bound length u pper bound length Moor e Mealy Moor e Meal y Frequency Divider Odd Parity Detector Modulo-5 Detector Serial Adder
23 Figure 2. GAL structure used in the experiment 23
24 SET(t) = sin3(0.3138t-1) hangseng(t-1) / mlr(t-1) cos2(0.6246t-1) * sin(0.3651t-1) cos3(0.7522t-1) cos3(0.7724t-1) sin3(1.5317t-1) cos(0.6676t-1) * mlr(t-1) Predict value Actual value In an experiment with the stock exchange prediction, all daily data were obtained from two sources: the data of Thai stock index and Minimum Loan Rate from bank of Thailand and gold price data from Gold Trader Association. The series that used in the experiment started from January 2003 December 2004, the data are 491 days. The data are divided into two groups: 420 days for training and 71 days for testing. 24
25 Predict value Actual value
26 How far is AI from reaching human-level intelligence? When will it happen? A few people think that human-level intelligence can be achieved by writing large numbers of programs of the kind people are now writing and assembling vast knowledge basis of facts in the languages now used for expressing knowledge. However, most AI researchers believe that new fundamental ideas are required, and therefore it cannot be predicted when human level intelligence will be achieved. John McCarthy 26
27 Future Research My website References Rimcharoen, S., Sutivong, D., and Chongstitvatana, P., "Curve Fitting Using Adaptive Evolution Strategies for Forecasting the Exchange Rate," Proc. of Electrical/Electronics, Computer, Telecommunications and Information Technology (ECTI) International Conference, Thailand, May 12-13, Suwannik, W. and Chongstitvatana, P., "On-line evolution of robot program using a memoized function", IEEE Conf. on Mechatronics and Machine Vision in Practice, Chiangmai, Thailand, Sept
28 Niparnan, N. and Chongstitvatana, P., "An improved genetic algorithm for the inference of finite state machine", IEEE Int. Conf. on Systems, Man and Cybernetics, Vol.7, 2002, pp , Tunisia, 6-9 Oct, Suwannik, W. and Chongstitvatana, P., "Improving the robustness of evolved robot arm control programs with multiple configurations", 2nd Asian Symposium on Industrial Automation and Robotics, Bangkok, Thailand, May 17-18, 2001, pp Chaisukkosol, C. and Chongstitvatana, P., "Evolving control programs for a biped static walker", IEEE Inter. Conf. on Humanoid Robots, Waseda, Tokyo, November 22-24, Chongstitvatana, P., Polvichai, J., "Learning a visual task by genetic programming", Proc. of IEEE/RSJ Inter. Conf. on Intelligent Robots and Systems, Osaka, Japan, Introductory material Goldberg, D., Genetic algorithms, Addison-Wesley, Whitley, D., "Genetic algorithm tutorial", /~genitor/miscpubs/tutorial.pdf -- on Artificial Intelligence 28
29 29
Reactive Planning with Evolutionary Computation
 Reactive Planning with Evolutionary Computation Chaiwat Jassadapakorn and Prabhas Chongstitvatana Intelligent System Laboratory, Department of Computer Engineering Chulalongkorn University, Bangkok 10330,
Reactive Planning with Evolutionary Computation Chaiwat Jassadapakorn and Prabhas Chongstitvatana Intelligent System Laboratory, Department of Computer Engineering Chulalongkorn University, Bangkok 10330,
Learning a Visual Task by Genetic Programming
 Learning a Visual Task by Genetic Programming Prabhas Chongstitvatana and Jumpol Polvichai Department of computer engineering Chulalongkorn University Bangkok 10330, Thailand fengpjs@chulkn.car.chula.ac.th
Learning a Visual Task by Genetic Programming Prabhas Chongstitvatana and Jumpol Polvichai Department of computer engineering Chulalongkorn University Bangkok 10330, Thailand fengpjs@chulkn.car.chula.ac.th
Evolutionary robotics Jørgen Nordmoen
 INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
A Review on Genetic Algorithm and Its Applications
 2017 IJSRST Volume 3 Issue 8 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science and Technology A Review on Genetic Algorithm and Its Applications Anju Bala Research Scholar, Department
2017 IJSRST Volume 3 Issue 8 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science and Technology A Review on Genetic Algorithm and Its Applications Anju Bala Research Scholar, Department
A Genetic Algorithm-Based Controller for Decentralized Multi-Agent Robotic Systems
 A Genetic Algorithm-Based Controller for Decentralized Multi-Agent Robotic Systems Arvin Agah Bio-Robotics Division Mechanical Engineering Laboratory, AIST-MITI 1-2 Namiki, Tsukuba 305, JAPAN agah@melcy.mel.go.jp
A Genetic Algorithm-Based Controller for Decentralized Multi-Agent Robotic Systems Arvin Agah Bio-Robotics Division Mechanical Engineering Laboratory, AIST-MITI 1-2 Namiki, Tsukuba 305, JAPAN agah@melcy.mel.go.jp
A comparison of a genetic algorithm and a depth first search algorithm applied to Japanese nonograms
 A comparison of a genetic algorithm and a depth first search algorithm applied to Japanese nonograms Wouter Wiggers Faculty of EECMS, University of Twente w.a.wiggers@student.utwente.nl ABSTRACT In this
A comparison of a genetic algorithm and a depth first search algorithm applied to Japanese nonograms Wouter Wiggers Faculty of EECMS, University of Twente w.a.wiggers@student.utwente.nl ABSTRACT In this
Evolution of Sensor Suites for Complex Environments
 Evolution of Sensor Suites for Complex Environments Annie S. Wu, Ayse S. Yilmaz, and John C. Sciortino, Jr. Abstract We present a genetic algorithm (GA) based decision tool for the design and configuration
Evolution of Sensor Suites for Complex Environments Annie S. Wu, Ayse S. Yilmaz, and John C. Sciortino, Jr. Abstract We present a genetic algorithm (GA) based decision tool for the design and configuration
COMPUTATONAL INTELLIGENCE
 COMPUTATONAL INTELLIGENCE October 2011 November 2011 Siegfried Nijssen partially based on slides by Uzay Kaymak Leiden Institute of Advanced Computer Science e-mail: snijssen@liacs.nl Katholieke Universiteit
COMPUTATONAL INTELLIGENCE October 2011 November 2011 Siegfried Nijssen partially based on slides by Uzay Kaymak Leiden Institute of Advanced Computer Science e-mail: snijssen@liacs.nl Katholieke Universiteit
Neuro-Fuzzy and Soft Computing: Fuzzy Sets. Chapter 1 of Neuro-Fuzzy and Soft Computing by Jang, Sun and Mizutani
 Chapter 1 of Neuro-Fuzzy and Soft Computing by Jang, Sun and Mizutani Outline Introduction Soft Computing (SC) vs. Conventional Artificial Intelligence (AI) Neuro-Fuzzy (NF) and SC Characteristics 2 Introduction
Chapter 1 of Neuro-Fuzzy and Soft Computing by Jang, Sun and Mizutani Outline Introduction Soft Computing (SC) vs. Conventional Artificial Intelligence (AI) Neuro-Fuzzy (NF) and SC Characteristics 2 Introduction
By Marek Perkowski ECE Seminar, Friday January 26, 2001
 By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
Using Genetic Algorithm in the Evolutionary Design of Sequential Logic Circuits
 IJCSI International Journal of Computer Science Issues, Vol. 8, Issue, May 0 ISSN (Online): 694-084 www.ijcsi.org Using Genetic Algorithm in the Evolutionary Design of Sequential Logic Circuits Parisa
IJCSI International Journal of Computer Science Issues, Vol. 8, Issue, May 0 ISSN (Online): 694-084 www.ijcsi.org Using Genetic Algorithm in the Evolutionary Design of Sequential Logic Circuits Parisa
Chapter 1: Introduction to Neuro-Fuzzy (NF) and Soft Computing (SC)
 and Soft Computing (SC)") Chapter 1: Introduction to Neuro-Fuzzy (NF) and Soft Computing (SC) Introduction (1.1) SC Constituants and Conventional Artificial Intelligence (AI) (1.2) NF and SC Characteristics (1.3) Jyh-Shing Roger
Chapter 1: Introduction to Neuro-Fuzzy (NF) and Soft Computing (SC) Introduction (1.1) SC Constituants and Conventional Artificial Intelligence (AI) (1.2) NF and SC Characteristics (1.3) Jyh-Shing Roger
LANDSCAPE SMOOTHING OF NUMERICAL PERMUTATION SPACES IN GENETIC ALGORITHMS
 LANDSCAPE SMOOTHING OF NUMERICAL PERMUTATION SPACES IN GENETIC ALGORITHMS ABSTRACT The recent popularity of genetic algorithms (GA s) and their application to a wide range of problems is a result of their
LANDSCAPE SMOOTHING OF NUMERICAL PERMUTATION SPACES IN GENETIC ALGORITHMS ABSTRACT The recent popularity of genetic algorithms (GA s) and their application to a wide range of problems is a result of their
Submitted November 19, 1989 to 2nd Conference Economics and Artificial Intelligence, July 2-6, 1990, Paris
 1 Submitted November 19, 1989 to 2nd Conference Economics and Artificial Intelligence, July 2-6, 1990, Paris DISCOVERING AN ECONOMETRIC MODEL BY. GENETIC BREEDING OF A POPULATION OF MATHEMATICAL FUNCTIONS
1 Submitted November 19, 1989 to 2nd Conference Economics and Artificial Intelligence, July 2-6, 1990, Paris DISCOVERING AN ECONOMETRIC MODEL BY. GENETIC BREEDING OF A POPULATION OF MATHEMATICAL FUNCTIONS
Artificial Intelligence. What is AI?
 2 Artificial Intelligence What is AI? Some Definitions of AI The scientific understanding of the mechanisms underlying thought and intelligent behavior and their embodiment in machines American Association
2 Artificial Intelligence What is AI? Some Definitions of AI The scientific understanding of the mechanisms underlying thought and intelligent behavior and their embodiment in machines American Association
Enhancing Embodied Evolution with Punctuated Anytime Learning
 Enhancing Embodied Evolution with Punctuated Anytime Learning Gary B. Parker, Member IEEE, and Gregory E. Fedynyshyn Abstract This paper discusses a new implementation of embodied evolution that uses the
Enhancing Embodied Evolution with Punctuated Anytime Learning Gary B. Parker, Member IEEE, and Gregory E. Fedynyshyn Abstract This paper discusses a new implementation of embodied evolution that uses the
Biologically Inspired Embodied Evolution of Survival
 Biologically Inspired Embodied Evolution of Survival Stefan Elfwing 1,2 Eiji Uchibe 2 Kenji Doya 2 Henrik I. Christensen 1 1 Centre for Autonomous Systems, Numerical Analysis and Computer Science, Royal
Biologically Inspired Embodied Evolution of Survival Stefan Elfwing 1,2 Eiji Uchibe 2 Kenji Doya 2 Henrik I. Christensen 1 1 Centre for Autonomous Systems, Numerical Analysis and Computer Science, Royal
Stock Price Prediction Using Multilayer Perceptron Neural Network by Monitoring Frog Leaping Algorithm
 Stock Price Prediction Using Multilayer Perceptron Neural Network by Monitoring Frog Leaping Algorithm Ahdieh Rahimi Garakani Department of Computer South Tehran Branch Islamic Azad University Tehran,
Stock Price Prediction Using Multilayer Perceptron Neural Network by Monitoring Frog Leaping Algorithm Ahdieh Rahimi Garakani Department of Computer South Tehran Branch Islamic Azad University Tehran,
UNIVERSITY OF REGINA FACULTY OF ENGINEERING. TIME TABLE: Once every two weeks (tentatively), every other Friday from pm
, every other Friday from pm") 1 UNIVERSITY OF REGINA FACULTY OF ENGINEERING COURSE NO: ENIN 880AL - 030 - Fall 2002 COURSE TITLE: Introduction to Intelligent Robotics CREDIT HOURS: 3 INSTRUCTOR: Dr. Rene V. Mayorga ED 427; Tel: 585-4726,
1 UNIVERSITY OF REGINA FACULTY OF ENGINEERING COURSE NO: ENIN 880AL - 030 - Fall 2002 COURSE TITLE: Introduction to Intelligent Robotics CREDIT HOURS: 3 INSTRUCTOR: Dr. Rene V. Mayorga ED 427; Tel: 585-4726,
This list supersedes the one published in the November 2002 issue of CR.
 PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
The Behavior Evolving Model and Application of Virtual Robots
 The Behavior Evolving Model and Application of Virtual Robots Suchul Hwang Kyungdal Cho V. Scott Gordon Inha Tech. College Inha Tech College CSUS, Sacramento 253 Yonghyundong Namku 253 Yonghyundong Namku
The Behavior Evolving Model and Application of Virtual Robots Suchul Hwang Kyungdal Cho V. Scott Gordon Inha Tech. College Inha Tech College CSUS, Sacramento 253 Yonghyundong Namku 253 Yonghyundong Namku
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization
 Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
A Hybrid Evolutionary Approach for Multi Robot Path Exploration Problem
 A Hybrid Evolutionary Approach for Multi Robot Path Exploration Problem K.. enthilkumar and K. K. Bharadwaj Abstract - Robot Path Exploration problem or Robot Motion planning problem is one of the famous
A Hybrid Evolutionary Approach for Multi Robot Path Exploration Problem K.. enthilkumar and K. K. Bharadwaj Abstract - Robot Path Exploration problem or Robot Motion planning problem is one of the famous
Outline. What is AI? A brief history of AI State of the art
 Introduction to AI Outline What is AI? A brief history of AI State of the art What is AI? AI is a branch of CS with connections to psychology, linguistics, economics, Goal make artificial systems solve
Introduction to AI Outline What is AI? A brief history of AI State of the art What is AI? AI is a branch of CS with connections to psychology, linguistics, economics, Goal make artificial systems solve
EvoCAD: Evolution-Assisted Design
 EvoCAD: Evolution-Assisted Design Pablo Funes, Louis Lapat and Jordan B. Pollack Brandeis University Department of Computer Science 45 South St., Waltham MA 02454 USA Since 996 we have been conducting
EvoCAD: Evolution-Assisted Design Pablo Funes, Louis Lapat and Jordan B. Pollack Brandeis University Department of Computer Science 45 South St., Waltham MA 02454 USA Since 996 we have been conducting
Robot Task-Level Programming Language and Simulation
 Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS
 CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS GARY B. PARKER, CONNECTICUT COLLEGE, USA, parker@conncoll.edu IVO I. PARASHKEVOV, CONNECTICUT COLLEGE, USA, iipar@conncoll.edu H. JOSEPH
CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS GARY B. PARKER, CONNECTICUT COLLEGE, USA, parker@conncoll.edu IVO I. PARASHKEVOV, CONNECTICUT COLLEGE, USA, iipar@conncoll.edu H. JOSEPH
Available online at ScienceDirect. Procedia Computer Science 24 (2013 )
") Available online at www.sciencedirect.com ScienceDirect Procedia Computer Science 24 (2013 ) 158 166 17th Asia Pacific Symposium on Intelligent and Evolutionary Systems, IES2013 The Automated Fault-Recovery
Available online at www.sciencedirect.com ScienceDirect Procedia Computer Science 24 (2013 ) 158 166 17th Asia Pacific Symposium on Intelligent and Evolutionary Systems, IES2013 The Automated Fault-Recovery
Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments
 Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments IMI Lab, Dept. of Computer Science University of North Carolina Charlotte Outline Problem and Context Basic RAMP Framework
Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments IMI Lab, Dept. of Computer Science University of North Carolina Charlotte Outline Problem and Context Basic RAMP Framework
Space Exploration of Multi-agent Robotics via Genetic Algorithm
 Space Exploration of Multi-agent Robotics via Genetic Algorithm T.O. Ting 1,*, Kaiyu Wan 2, Ka Lok Man 2, and Sanghyuk Lee 1 1 Dept. Electrical and Electronic Eng., 2 Dept. Computer Science and Software
Space Exploration of Multi-agent Robotics via Genetic Algorithm T.O. Ting 1,*, Kaiyu Wan 2, Ka Lok Man 2, and Sanghyuk Lee 1 1 Dept. Electrical and Electronic Eng., 2 Dept. Computer Science and Software
SnakeSIM: a Snake Robot Simulation Framework for Perception-Driven Obstacle-Aided Locomotion
 : a Snake Robot Simulation Framework for Perception-Driven Obstacle-Aided Locomotion Filippo Sanfilippo 1, Øyvind Stavdahl 1 and Pål Liljebäck 1 1 Dept. of Engineering Cybernetics, Norwegian University
: a Snake Robot Simulation Framework for Perception-Driven Obstacle-Aided Locomotion Filippo Sanfilippo 1, Øyvind Stavdahl 1 and Pål Liljebäck 1 1 Dept. of Engineering Cybernetics, Norwegian University
arxiv: v1 [cs.ne] 3 May 2018
![arxiv: v1 [cs.ne] 3 May 2018](/thumbs/86/93513162.jpg "arxiv: v1 [cs.ne] 3 May 2018") VINE: An Open Source Interactive Data Visualization Tool for Neuroevolution Uber AI Labs San Francisco, CA 94103 {ruiwang,jeffclune,kstanley}@uber.com arxiv:1805.01141v1 [cs.ne] 3 May 2018 ABSTRACT Recent
VINE: An Open Source Interactive Data Visualization Tool for Neuroevolution Uber AI Labs San Francisco, CA 94103 {ruiwang,jeffclune,kstanley}@uber.com arxiv:1805.01141v1 [cs.ne] 3 May 2018 ABSTRACT Recent
Learning Behaviors for Environment Modeling by Genetic Algorithm
 Learning Behaviors for Environment Modeling by Genetic Algorithm Seiji Yamada Department of Computational Intelligence and Systems Science Interdisciplinary Graduate School of Science and Engineering Tokyo
Learning Behaviors for Environment Modeling by Genetic Algorithm Seiji Yamada Department of Computational Intelligence and Systems Science Interdisciplinary Graduate School of Science and Engineering Tokyo
Biomimetic Design of Actuators, Sensors and Robots
 Biomimetic Design of Actuators, Sensors and Robots Takashi Maeno, COE Member of autonomous-cooperative robotics group Department of Mechanical Engineering Keio University Abstract Biological life has greatly
Biomimetic Design of Actuators, Sensors and Robots Takashi Maeno, COE Member of autonomous-cooperative robotics group Department of Mechanical Engineering Keio University Abstract Biological life has greatly
Fault Location Using Sparse Wide Area Measurements
 319 Study Committee B5 Colloquium October 19-24, 2009 Jeju Island, Korea Fault Location Using Sparse Wide Area Measurements KEZUNOVIC, M., DUTTA, P. (Texas A & M University, USA) Summary Transmission line
319 Study Committee B5 Colloquium October 19-24, 2009 Jeju Island, Korea Fault Location Using Sparse Wide Area Measurements KEZUNOVIC, M., DUTTA, P. (Texas A & M University, USA) Summary Transmission line
Instructors: Prof. Takashi Hiyama (TH) Prof. Hassan Bevrani (HB) Syafaruddin, D.Eng (S) Time: Wednesday,
 Prof. Hassan Bevrani (HB) Syafaruddin, D.Eng (S) Time: Wednesday,") Intelligent System Application to Power System Instructors: Prof. Takashi Hiyama (TH) Prof. Hassan Bevrani (HB) Syafaruddin, D.Eng (S) Time: Wednesday, 10.20-11.50 Venue: Room 208 Intelligent System Application
Intelligent System Application to Power System Instructors: Prof. Takashi Hiyama (TH) Prof. Hassan Bevrani (HB) Syafaruddin, D.Eng (S) Time: Wednesday, 10.20-11.50 Venue: Room 208 Intelligent System Application
RISTO MIIKKULAINEN, SENTIENT (HTTP://VENTUREBEAT.COM/AUTHOR/RISTO-MIIKKULAINEN- SATIENT/) APRIL 3, :23 PM
 APRIL 3, :23 PM") 1,2 Guest Machines are becoming more creative than humans RISTO MIIKKULAINEN, SENTIENT (HTTP://VENTUREBEAT.COM/AUTHOR/RISTO-MIIKKULAINEN- SATIENT/) APRIL 3, 2016 12:23 PM TAGS: ARTIFICIAL INTELLIGENCE
1,2 Guest Machines are becoming more creative than humans RISTO MIIKKULAINEN, SENTIENT (HTTP://VENTUREBEAT.COM/AUTHOR/RISTO-MIIKKULAINEN- SATIENT/) APRIL 3, 2016 12:23 PM TAGS: ARTIFICIAL INTELLIGENCE
Evolutionary Programming Optimization Technique for Solving Reactive Power Planning in Power System
 Evolutionary Programg Optimization Technique for Solving Reactive Power Planning in Power System ISMAIL MUSIRIN, TITIK KHAWA ABDUL RAHMAN Faculty of Electrical Engineering MARA University of Technology
Evolutionary Programg Optimization Technique for Solving Reactive Power Planning in Power System ISMAIL MUSIRIN, TITIK KHAWA ABDUL RAHMAN Faculty of Electrical Engineering MARA University of Technology
Evolving Adaptive Play for the Game of Spoof. Mark Wittkamp
 Evolving Adaptive Play for the Game of Spoof Mark Wittkamp This report is submitted as partial fulfilment of the requirements for the Honours Programme of the School of Computer Science and Software Engineering,
Evolving Adaptive Play for the Game of Spoof Mark Wittkamp This report is submitted as partial fulfilment of the requirements for the Honours Programme of the School of Computer Science and Software Engineering,
CS 441/541 Artificial Intelligence Fall, Homework 6: Genetic Algorithms. Due Monday Nov. 24.
 CS 441/541 Artificial Intelligence Fall, 2008 Homework 6: Genetic Algorithms Due Monday Nov. 24. In this assignment you will code and experiment with a genetic algorithm as a method for evolving control
CS 441/541 Artificial Intelligence Fall, 2008 Homework 6: Genetic Algorithms Due Monday Nov. 24. In this assignment you will code and experiment with a genetic algorithm as a method for evolving control
An Evolutionary Approach to the Synthesis of Combinational Circuits
 An Evolutionary Approach to the Synthesis of Combinational Circuits Cecília Reis Institute of Engineering of Porto Polytechnic Institute of Porto Rua Dr. António Bernardino de Almeida, 4200-072 Porto Portugal
An Evolutionary Approach to the Synthesis of Combinational Circuits Cecília Reis Institute of Engineering of Porto Polytechnic Institute of Porto Rua Dr. António Bernardino de Almeida, 4200-072 Porto Portugal
GPU Computing for Cognitive Robotics
 GPU Computing for Cognitive Robotics Martin Peniak, Davide Marocco, Angelo Cangelosi GPU Technology Conference, San Jose, California, 25 March, 2014 Acknowledgements This study was financed by: EU Integrating
GPU Computing for Cognitive Robotics Martin Peniak, Davide Marocco, Angelo Cangelosi GPU Technology Conference, San Jose, California, 25 March, 2014 Acknowledgements This study was financed by: EU Integrating
Adaptive Humanoid Robot Arm Motion Generation by Evolved Neural Controllers
 Proceedings of the 3 rd International Conference on Mechanical Engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 170 Adaptive Humanoid Robot Arm Motion Generation by Evolved
Proceedings of the 3 rd International Conference on Mechanical Engineering and Mechatronics Prague, Czech Republic, August 14-15, 2014 Paper No. 170 Adaptive Humanoid Robot Arm Motion Generation by Evolved
The Application of Multi-Level Genetic Algorithms in Assembly Planning
 Volume 17, Number 4 - August 2001 to October 2001 The Application of Multi-Level Genetic Algorithms in Assembly Planning By Dr. Shana Shiang-Fong Smith (Shiang-Fong Chen) and Mr. Yong-Jin Liu KEYWORD SEARCH
Volume 17, Number 4 - August 2001 to October 2001 The Application of Multi-Level Genetic Algorithms in Assembly Planning By Dr. Shana Shiang-Fong Smith (Shiang-Fong Chen) and Mr. Yong-Jin Liu KEYWORD SEARCH
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
SECTOR SYNTHESIS OF ANTENNA ARRAY USING GENETIC ALGORITHM
 2005-2008 JATIT. All rights reserved. SECTOR SYNTHESIS OF ANTENNA ARRAY USING GENETIC ALGORITHM 1 Abdelaziz A. Abdelaziz and 2 Hanan A. Kamal 1 Assoc. Prof., Department of Electrical Engineering, Faculty
2005-2008 JATIT. All rights reserved. SECTOR SYNTHESIS OF ANTENNA ARRAY USING GENETIC ALGORITHM 1 Abdelaziz A. Abdelaziz and 2 Hanan A. Kamal 1 Assoc. Prof., Department of Electrical Engineering, Faculty
Publication P IEEE. Reprinted with permission.
 P3 Publication P3 J. Martikainen and S. J. Ovaska function approximation by neural networks in the optimization of MGP-FIR filters in Proc. of the IEEE Mountain Workshop on Adaptive and Learning Systems
P3 Publication P3 J. Martikainen and S. J. Ovaska function approximation by neural networks in the optimization of MGP-FIR filters in Proc. of the IEEE Mountain Workshop on Adaptive and Learning Systems
Co-evolution for Communication: An EHW Approach
 Journal of Universal Computer Science, vol. 13, no. 9 (2007), 1300-1308 submitted: 12/6/06, accepted: 24/10/06, appeared: 28/9/07 J.UCS Co-evolution for Communication: An EHW Approach Yasser Baleghi Damavandi,
Journal of Universal Computer Science, vol. 13, no. 9 (2007), 1300-1308 submitted: 12/6/06, accepted: 24/10/06, appeared: 28/9/07 J.UCS Co-evolution for Communication: An EHW Approach Yasser Baleghi Damavandi,
A Genetic Algorithm for Solving Beehive Hidato Puzzles
 A Genetic Algorithm for Solving Beehive Hidato Puzzles Matheus Müller Pereira da Silva and Camila Silva de Magalhães Universidade Federal do Rio de Janeiro - UFRJ, Campus Xerém, Duque de Caxias, RJ 25245-390,
A Genetic Algorithm for Solving Beehive Hidato Puzzles Matheus Müller Pereira da Silva and Camila Silva de Magalhães Universidade Federal do Rio de Janeiro - UFRJ, Campus Xerém, Duque de Caxias, RJ 25245-390,
Vol. 5, No. 6 June 2014 ISSN Journal of Emerging Trends in Computing and Information Sciences CIS Journal. All rights reserved.
 Optimal Synthesis of Finite State Machines with Universal Gates using Evolutionary Algorithm 1 Noor Ullah, 2 Khawaja M.Yahya, 3 Irfan Ahmed 1, 2, 3 Department of Electrical Engineering University of Engineering
Optimal Synthesis of Finite State Machines with Universal Gates using Evolutionary Algorithm 1 Noor Ullah, 2 Khawaja M.Yahya, 3 Irfan Ahmed 1, 2, 3 Department of Electrical Engineering University of Engineering
Load Frequency Controller Design for Interconnected Electric Power System
 Load Frequency Controller Design for Interconnected Electric Power System M. A. Tammam** M. A. S. Aboelela* M. A. Moustafa* A. E. A. Seif* * Department of Electrical Power and Machines, Faculty of Engineering,
Load Frequency Controller Design for Interconnected Electric Power System M. A. Tammam** M. A. S. Aboelela* M. A. Moustafa* A. E. A. Seif* * Department of Electrical Power and Machines, Faculty of Engineering,
Automating a Solution for Optimum PTP Deployment
 Automating a Solution for Optimum PTP Deployment ITSF 2015 David O Connor Bridge Worx in Sync Sync Architect V4: Sync planning & diagnostic tool. Evaluates physical layer synchronisation distribution by
Automating a Solution for Optimum PTP Deployment ITSF 2015 David O Connor Bridge Worx in Sync Sync Architect V4: Sync planning & diagnostic tool. Evaluates physical layer synchronisation distribution by
Collaborative transmission in wireless sensor networks
 Collaborative transmission in wireless sensor networks Randomised search approaches Stephan Sigg Distributed and Ubiquitous Systems Technische Universität Braunschweig November 22, 2010 Stephan Sigg Collaborative
Collaborative transmission in wireless sensor networks Randomised search approaches Stephan Sigg Distributed and Ubiquitous Systems Technische Universität Braunschweig November 22, 2010 Stephan Sigg Collaborative
Application of AI Technology to Industrial Revolution
 Application of AI Technology to Industrial Revolution By Dr. Suchai Thanawastien 1. What is AI? Artificial Intelligence or AI is a branch of computer science that tries to emulate the capabilities of learning,
Application of AI Technology to Industrial Revolution By Dr. Suchai Thanawastien 1. What is AI? Artificial Intelligence or AI is a branch of computer science that tries to emulate the capabilities of learning,
CS 730/830: Intro AI. Prof. Wheeler Ruml. TA Bence Cserna. Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1
 CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
Journal Title ISSN 5. MIS QUARTERLY BRIEFINGS IN BIOINFORMATICS
 List of Journals with impact factors Date retrieved: 1 August 2009 Journal Title ISSN Impact Factor 5-Year Impact Factor 1. ACM SURVEYS 0360-0300 9.920 14.672 2. VLDB JOURNAL 1066-8888 6.800 9.164 3. IEEE
List of Journals with impact factors Date retrieved: 1 August 2009 Journal Title ISSN Impact Factor 5-Year Impact Factor 1. ACM SURVEYS 0360-0300 9.920 14.672 2. VLDB JOURNAL 1066-8888 6.800 9.164 3. IEEE
CPS331 Lecture: Genetic Algorithms last revised October 28, 2016
 CPS331 Lecture: Genetic Algorithms last revised October 28, 2016 Objectives: 1. To explain the basic ideas of GA/GP: evolution of a population; fitness, crossover, mutation Materials: 1. Genetic NIM learner
CPS331 Lecture: Genetic Algorithms last revised October 28, 2016 Objectives: 1. To explain the basic ideas of GA/GP: evolution of a population; fitness, crossover, mutation Materials: 1. Genetic NIM learner
Solving Sudoku with Genetic Operations that Preserve Building Blocks
 Solving Sudoku with Genetic Operations that Preserve Building Blocks Yuji Sato, Member, IEEE, and Hazuki Inoue Abstract Genetic operations that consider effective building blocks are proposed for using
Solving Sudoku with Genetic Operations that Preserve Building Blocks Yuji Sato, Member, IEEE, and Hazuki Inoue Abstract Genetic operations that consider effective building blocks are proposed for using
Smart Home System for Energy Saving using Genetic- Fuzzy-Neural Networks Approach
 Int. J. of Sustainable Water & Environmental Systems Volume 8, No. 1 (216) 27-31 Abstract Smart Home System for Energy Saving using Genetic- Fuzzy-Neural Networks Approach Anwar Jarndal* Electrical and
Int. J. of Sustainable Water & Environmental Systems Volume 8, No. 1 (216) 27-31 Abstract Smart Home System for Energy Saving using Genetic- Fuzzy-Neural Networks Approach Anwar Jarndal* Electrical and
FINANCIAL TIME SERIES FORECASTING USING A HYBRID NEURAL- EVOLUTIVE APPROACH
 FINANCIAL TIME SERIES FORECASTING USING A HYBRID NEURAL- EVOLUTIVE APPROACH JUAN J. FLORES 1, ROBERTO LOAEZA 1, HECTOR RODRIGUEZ 1, FEDERICO GONZALEZ 2, BEATRIZ FLORES 2, ANTONIO TERCEÑO GÓMEZ 3 1 Division
FINANCIAL TIME SERIES FORECASTING USING A HYBRID NEURAL- EVOLUTIVE APPROACH JUAN J. FLORES 1, ROBERTO LOAEZA 1, HECTOR RODRIGUEZ 1, FEDERICO GONZALEZ 2, BEATRIZ FLORES 2, ANTONIO TERCEÑO GÓMEZ 3 1 Division
Assistive Humanoid Robot Arm Motion Generation in Dynamic Environment Based on Neural Networks
 Journal of Automation and Control Engineering Vol. 3, No. 2, April 2015 Assistive Humanoid Robot Arm Motion Generation in Dynamic Environment Based on Neural Networks Genci Capi, Zulkifli Mohamed, and
Journal of Automation and Control Engineering Vol. 3, No. 2, April 2015 Assistive Humanoid Robot Arm Motion Generation in Dynamic Environment Based on Neural Networks Genci Capi, Zulkifli Mohamed, and
Computational Intelligence Optimization
 Computational Intelligence Optimization Ferrante Neri Department of Mathematical Information Technology, University of Jyväskylä 12.09.2011 1 What is Optimization? 2 What is a fitness landscape? 3 Features
Computational Intelligence Optimization Ferrante Neri Department of Mathematical Information Technology, University of Jyväskylä 12.09.2011 1 What is Optimization? 2 What is a fitness landscape? 3 Features
The Genetic Algorithm
 The Genetic Algorithm The Genetic Algorithm, (GA) is finding increasing applications in electromagnetics including antenna design. In this lesson we will learn about some of these techniques so you are
The Genetic Algorithm The Genetic Algorithm, (GA) is finding increasing applications in electromagnetics including antenna design. In this lesson we will learn about some of these techniques so you are
CURRICULUM VITAE. Evan Drumwright EDUCATION PROFESSIONAL PUBLICATIONS
 CURRICULUM VITAE Evan Drumwright 209 Dunn Hall The University of Memphis Memphis, TN 38152 Phone: 901-678-3142 edrmwrgh@memphis.edu http://cs.memphis.edu/ edrmwrgh EDUCATION Ph.D., Computer Science, May
CURRICULUM VITAE Evan Drumwright 209 Dunn Hall The University of Memphis Memphis, TN 38152 Phone: 901-678-3142 edrmwrgh@memphis.edu http://cs.memphis.edu/ edrmwrgh EDUCATION Ph.D., Computer Science, May
ARTIFICIAL INTELLIGENCE IN POWER SYSTEMS
 ARTIFICIAL INTELLIGENCE IN POWER SYSTEMS Prof.Somashekara Reddy 1, Kusuma S 2 1 Department of MCA, NHCE Bangalore, India 2 Kusuma S, Department of MCA, NHCE Bangalore, India Abstract: Artificial Intelligence
ARTIFICIAL INTELLIGENCE IN POWER SYSTEMS Prof.Somashekara Reddy 1, Kusuma S 2 1 Department of MCA, NHCE Bangalore, India 2 Kusuma S, Department of MCA, NHCE Bangalore, India Abstract: Artificial Intelligence
Introduction to Genetic Algorithms
 Introduction to Genetic Algorithms Peter G. Anderson, Computer Science Department Rochester Institute of Technology, Rochester, New York anderson@cs.rit.edu http://www.cs.rit.edu/ February 2004 pg. 1 Abstract
Introduction to Genetic Algorithms Peter G. Anderson, Computer Science Department Rochester Institute of Technology, Rochester, New York anderson@cs.rit.edu http://www.cs.rit.edu/ February 2004 pg. 1 Abstract
Wire Layer Geometry Optimization using Stochastic Wire Sampling
 Wire Layer Geometry Optimization using Stochastic Wire Sampling Raymond A. Wildman*, Joshua I. Kramer, Daniel S. Weile, and Philip Christie Department University of Delaware Introduction Is it possible
Wire Layer Geometry Optimization using Stochastic Wire Sampling Raymond A. Wildman*, Joshua I. Kramer, Daniel S. Weile, and Philip Christie Department University of Delaware Introduction Is it possible
Evolutions of communication
 Evolutions of communication Alex Bell, Andrew Pace, and Raul Santos May 12, 2009 Abstract In this paper a experiment is presented in which two simulated robots evolved a form of communication to allow
Evolutions of communication Alex Bell, Andrew Pace, and Raul Santos May 12, 2009 Abstract In this paper a experiment is presented in which two simulated robots evolved a form of communication to allow
A Divide-and-Conquer Approach to Evolvable Hardware
 A Divide-and-Conquer Approach to Evolvable Hardware Jim Torresen Department of Informatics, University of Oslo, PO Box 1080 Blindern N-0316 Oslo, Norway E-mail: jimtoer@idi.ntnu.no Abstract. Evolvable
A Divide-and-Conquer Approach to Evolvable Hardware Jim Torresen Department of Informatics, University of Oslo, PO Box 1080 Blindern N-0316 Oslo, Norway E-mail: jimtoer@idi.ntnu.no Abstract. Evolvable
Outline. Introduction to AI. Artificial Intelligence. What is an AI? What is an AI? Agents Environments
 Outline Introduction to AI ECE457 Applied Artificial Intelligence Fall 2007 Lecture #1 What is an AI? Russell & Norvig, chapter 1 Agents s Russell & Norvig, chapter 2 ECE457 Applied Artificial Intelligence
Outline Introduction to AI ECE457 Applied Artificial Intelligence Fall 2007 Lecture #1 What is an AI? Russell & Norvig, chapter 1 Agents s Russell & Norvig, chapter 2 ECE457 Applied Artificial Intelligence
Creating a Dominion AI Using Genetic Algorithms
 Creating a Dominion AI Using Genetic Algorithms Abstract Mok Ming Foong Dominion is a deck-building card game. It allows for complex strategies, has an aspect of randomness in card drawing, and no obvious
Creating a Dominion AI Using Genetic Algorithms Abstract Mok Ming Foong Dominion is a deck-building card game. It allows for complex strategies, has an aspect of randomness in card drawing, and no obvious
Multi-Robot Learning with Particle Swarm Optimization
 Multi-Robot Learning with Particle Swarm Optimization Jim Pugh and Alcherio Martinoli Swarm-Intelligent Systems Group École Polytechnique Fédérale de Lausanne 5 Lausanne, Switzerland {jim.pugh,alcherio.martinoli}@epfl.ch
Multi-Robot Learning with Particle Swarm Optimization Jim Pugh and Alcherio Martinoli Swarm-Intelligent Systems Group École Polytechnique Fédérale de Lausanne 5 Lausanne, Switzerland {jim.pugh,alcherio.martinoli}@epfl.ch
AIS and Swarm Intelligence : Immune-inspired Swarm Robotics
 AIS and Swarm Intelligence : Immune-inspired Swarm Robotics Jon Timmis Department of Electronics Department of Computer Science York Center for Complex Systems Analysis jtimmis@cs.york.ac.uk http://www-users.cs.york.ac.uk/jtimmis
AIS and Swarm Intelligence : Immune-inspired Swarm Robotics Jon Timmis Department of Electronics Department of Computer Science York Center for Complex Systems Analysis jtimmis@cs.york.ac.uk http://www-users.cs.york.ac.uk/jtimmis
HMM-based Error Recovery of Dance Step Selection for Dance Partner Robot
 27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 ThA4.3 HMM-based Error Recovery of Dance Step Selection for Dance Partner Robot Takahiro Takeda, Yasuhisa Hirata,
27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 ThA4.3 HMM-based Error Recovery of Dance Step Selection for Dance Partner Robot Takahiro Takeda, Yasuhisa Hirata,
M ous experience and knowledge to aid problem solving
 Adding Memory to the Evolutionary Planner/Navigat or Krzysztof Trojanowski*, Zbigniew Michalewicz"*, Jing Xiao" Abslract-The integration of evolutionary approaches with adaptive memory processes is emerging
Adding Memory to the Evolutionary Planner/Navigat or Krzysztof Trojanowski*, Zbigniew Michalewicz"*, Jing Xiao" Abslract-The integration of evolutionary approaches with adaptive memory processes is emerging
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Lecture 10: Memetic Algorithms - I. An Introduction to Meta-Heuristics, Produced by Qiangfu Zhao (Since 2012), All rights reserved
, All rights reserved") Lecture 10: Memetic Algorithms - I Lec10/1 Contents Definition of memetic algorithms Definition of memetic evolution Hybrids that are not memetic algorithms 1 st order memetic algorithms 2 nd order memetic
Lecture 10: Memetic Algorithms - I Lec10/1 Contents Definition of memetic algorithms Definition of memetic evolution Hybrids that are not memetic algorithms 1 st order memetic algorithms 2 nd order memetic
AI MAGAZINE AMER ASSOC ARTIFICIAL INTELL UNITED STATES English ANNALS OF MATHEMATICS AND ARTIFICIAL
 Title Publisher ISSN Country Language ACM Transactions on Autonomous and Adaptive Systems ASSOC COMPUTING MACHINERY 1556-4665 UNITED STATES English ACM Transactions on Intelligent Systems and Technology
Title Publisher ISSN Country Language ACM Transactions on Autonomous and Adaptive Systems ASSOC COMPUTING MACHINERY 1556-4665 UNITED STATES English ACM Transactions on Intelligent Systems and Technology
Anca ANDREICA Producția științifică
 Anca ANDREICA Producția științifică Lucrări categoriile A, B și C Lucrări categoriile A și B puncte 9 puncte Lucrări categoria A A. Agapie, A. Andreica, M. Giuclea, Probabilistic Cellular Automata, Journal
Anca ANDREICA Producția științifică Lucrări categoriile A, B și C Lucrări categoriile A și B puncte 9 puncte Lucrări categoria A A. Agapie, A. Andreica, M. Giuclea, Probabilistic Cellular Automata, Journal
4D-Particle filter localization for a simulated UAV
 4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
4D-Particle filter localization for a simulated UAV Anna Chiara Bellini annachiara.bellini@gmail.com Abstract. Particle filters are a mathematical method that can be used to build a belief about the location
Applying Mechanism of Crowd in Evolutionary MAS for Multiobjective Optimisation
 Applying Mechanism of Crowd in Evolutionary MAS for Multiobjective Optimisation Marek Kisiel-Dorohinicki Λ Krzysztof Socha y Adam Gagatek z Abstract This work introduces a new evolutionary approach to
Applying Mechanism of Crowd in Evolutionary MAS for Multiobjective Optimisation Marek Kisiel-Dorohinicki Λ Krzysztof Socha y Adam Gagatek z Abstract This work introduces a new evolutionary approach to
Neural Networks for Real-time Pathfinding in Computer Games
 Neural Networks for Real-time Pathfinding in Computer Games Ross Graham 1, Hugh McCabe 1 & Stephen Sheridan 1 1 School of Informatics and Engineering, Institute of Technology at Blanchardstown, Dublin
Neural Networks for Real-time Pathfinding in Computer Games Ross Graham 1, Hugh McCabe 1 & Stephen Sheridan 1 1 School of Informatics and Engineering, Institute of Technology at Blanchardstown, Dublin
A Numerical Approach to Understanding Oscillator Neural Networks
 A Numerical Approach to Understanding Oscillator Neural Networks Natalie Klein Mentored by Jon Wilkins Networks of coupled oscillators are a form of dynamical network originally inspired by various biological
A Numerical Approach to Understanding Oscillator Neural Networks Natalie Klein Mentored by Jon Wilkins Networks of coupled oscillators are a form of dynamical network originally inspired by various biological
Global Asynchronous Distributed Interactive Genetic Algorithm
 Global Asynchronous Distributed Interactive Genetic Algorithm Mitsunori MIKI, Yuki YAMAMOTO, Sanae WAKE and Tomoyuki HIROYASU Abstract We have already proposed Parallel Distributed Interactive Genetic
Global Asynchronous Distributed Interactive Genetic Algorithm Mitsunori MIKI, Yuki YAMAMOTO, Sanae WAKE and Tomoyuki HIROYASU Abstract We have already proposed Parallel Distributed Interactive Genetic
Evolving Predator Control Programs for an Actual Hexapod Robot Predator
 Evolving Predator Control Programs for an Actual Hexapod Robot Predator Gary Parker Department of Computer Science Connecticut College New London, CT, USA parker@conncoll.edu Basar Gulcu Department of
Evolving Predator Control Programs for an Actual Hexapod Robot Predator Gary Parker Department of Computer Science Connecticut College New London, CT, USA parker@conncoll.edu Basar Gulcu Department of
Achieving Desirable Gameplay Objectives by Niched Evolution of Game Parameters
 Achieving Desirable Gameplay Objectives by Niched Evolution of Game Parameters Scott Watson, Andrew Vardy, Wolfgang Banzhaf Department of Computer Science Memorial University of Newfoundland St John s.
Achieving Desirable Gameplay Objectives by Niched Evolution of Game Parameters Scott Watson, Andrew Vardy, Wolfgang Banzhaf Department of Computer Science Memorial University of Newfoundland St John s.
Online Evolution for Cooperative Behavior in Group Robot Systems
 282 International Dong-Wook Journal of Lee, Control, Sang-Wook Automation, Seo, and Systems, Kwee-Bo vol. Sim 6, no. 2, pp. 282-287, April 2008 Online Evolution for Cooperative Behavior in Group Robot
282 International Dong-Wook Journal of Lee, Control, Sang-Wook Automation, Seo, and Systems, Kwee-Bo vol. Sim 6, no. 2, pp. 282-287, April 2008 Online Evolution for Cooperative Behavior in Group Robot
Multi-Robot Teamwork Cooperative Multi-Robot Systems
 Multi-Robot Teamwork Cooperative Lecture 1: Basic Concepts Gal A. Kaminka galk@cs.biu.ac.il 2 Why Robotics? Basic Science Study mechanics, energy, physiology, embodiment Cybernetics: the mind (rather than
Multi-Robot Teamwork Cooperative Lecture 1: Basic Concepts Gal A. Kaminka galk@cs.biu.ac.il 2 Why Robotics? Basic Science Study mechanics, energy, physiology, embodiment Cybernetics: the mind (rather than
Genetic Algorithms with Heuristic Knight s Tour Problem
 Genetic Algorithms with Heuristic Knight s Tour Problem Jafar Al-Gharaibeh Computer Department University of Idaho Moscow, Idaho, USA Zakariya Qawagneh Computer Department Jordan University for Science
Genetic Algorithms with Heuristic Knight s Tour Problem Jafar Al-Gharaibeh Computer Department University of Idaho Moscow, Idaho, USA Zakariya Qawagneh Computer Department Jordan University for Science
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball
 Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Evolutionary Image Enhancement for Impulsive Noise Reduction
 Evolutionary Image Enhancement for Impulsive Noise Reduction Ung-Keun Cho, Jin-Hyuk Hong, and Sung-Bae Cho Dept. of Computer Science, Yonsei University Biometrics Engineering Research Center 134 Sinchon-dong,
Evolutionary Image Enhancement for Impulsive Noise Reduction Ung-Keun Cho, Jin-Hyuk Hong, and Sung-Bae Cho Dept. of Computer Science, Yonsei University Biometrics Engineering Research Center 134 Sinchon-dong,
Mehrdad Amirghasemi a* Reza Zamani a
 The roles of evolutionary computation, fitness landscape, constructive methods and local searches in the development of adaptive systems for infrastructure planning Mehrdad Amirghasemi a* Reza Zamani a
The roles of evolutionary computation, fitness landscape, constructive methods and local searches in the development of adaptive systems for infrastructure planning Mehrdad Amirghasemi a* Reza Zamani a
A.I in Automotive? Why and When.
 A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
Pseudo Noise Sequence Generation using Elliptic Curve for CDMA and Security Application
 IJIRST International Journal for Innovative Research in Science & Technology Volume 1 Issue 11 April 2015 ISSN (online): 2349-6010 Pseudo Noise Sequence Generation using Elliptic Curve for CDMA and Security
IJIRST International Journal for Innovative Research in Science & Technology Volume 1 Issue 11 April 2015 ISSN (online): 2349-6010 Pseudo Noise Sequence Generation using Elliptic Curve for CDMA and Security
EARIN Jarosław Arabas Room #223, Electronics Bldg.
 EARIN http://elektron.elka.pw.edu.pl/~jarabas/earin.html Jarosław Arabas jarabas@elka.pw.edu.pl Room #223, Electronics Bldg. Paweł Cichosz pcichosz@elka.pw.edu.pl Room #215, Electronics Bldg. EARIN Jarosław
EARIN http://elektron.elka.pw.edu.pl/~jarabas/earin.html Jarosław Arabas jarabas@elka.pw.edu.pl Room #223, Electronics Bldg. Paweł Cichosz pcichosz@elka.pw.edu.pl Room #215, Electronics Bldg. EARIN Jarosław
Analog Circuit for Motion Detection Applied to Target Tracking System
 14 Analog Circuit for Motion Detection Applied to Target Tracking System Kimihiro Nishio Tsuyama National College of Technology Japan 1. Introduction It is necessary for the system such as the robotics
14 Analog Circuit for Motion Detection Applied to Target Tracking System Kimihiro Nishio Tsuyama National College of Technology Japan 1. Introduction It is necessary for the system such as the robotics
Cellular Neural Networks-Based Genetic Algorithm for Optimizing the Behavior of an Unstructured Robot
 International Journal of Computational Intelligence Systems, Vol.2, No. 2 (June, 2009), 124-131 Cellular Neural Networks-Based Genetic Algorithm for Optimizing the Behavior of an Unstructured Robot Alireza
International Journal of Computational Intelligence Systems, Vol.2, No. 2 (June, 2009), 124-131 Cellular Neural Networks-Based Genetic Algorithm for Optimizing the Behavior of an Unstructured Robot Alireza
Implementation of FPGA based Decision Making Engine and Genetic Algorithm (GA) for Control of Wireless Parameters
 for Control of Wireless Parameters") Advances in Computational Sciences and Technology ISSN 0973-6107 Volume 11, Number 1 (2018) pp. 15-21 Research India Publications http://www.ripublication.com Implementation of FPGA based Decision Making
Advances in Computational Sciences and Technology ISSN 0973-6107 Volume 11, Number 1 (2018) pp. 15-21 Research India Publications http://www.ripublication.com Implementation of FPGA based Decision Making
PES: A system for parallelized fitness evaluation of evolutionary methods
 PES: A system for parallelized fitness evaluation of evolutionary methods Onur Soysal, Erkin Bahçeci, and Erol Şahin Department of Computer Engineering Middle East Technical University 06531 Ankara, Turkey
PES: A system for parallelized fitness evaluation of evolutionary methods Onur Soysal, Erkin Bahçeci, and Erol Şahin Department of Computer Engineering Middle East Technical University 06531 Ankara, Turkey
Optimization of Robot Arm Motion in Human Environment
 Optimization of Robot Arm Motion in Human Environment Zulkifli Mohamed 1, Mitsuki Kitani 2, Genci Capi 3 123 Dept. of Electrical and Electronic System Engineering, Faculty of Engineering University of
Optimization of Robot Arm Motion in Human Environment Zulkifli Mohamed 1, Mitsuki Kitani 2, Genci Capi 3 123 Dept. of Electrical and Electronic System Engineering, Faculty of Engineering University of