Actuator Components 2
|
|
|
- Camron Reeves
- 5 years ago
- Views:
Transcription
1 Actuator Components 2 Term project midterm review Bearings Seals Sensors 1 Actuator Components
2 Term Project Midterm Review Details of term project are contained in first lecture of the term Should be using the techniques covered in class to perform design trades Goal is a complete design for the rover mobility systems by the end of the term 2 Actuator Components
3 Objectives of Mid-Term Review Make sure that progress is being made on the project Verify results to date to ensure that there are no misunderstandings of fundamental principles Get an initial look at the concepts under consideration Due Tuesday, Nov. 1 3 Actuator Components
4 Mid-Term Review Expectations Notional/ strawman design of rover Solid models of design Details of mass, power, etc. Trade studies (NOT an exhaustive list!) Number, size, configuration of wheels Diameter and width of wheels Size and number of grousers Suspension design Steering design Alternate design approaches (e.g., tracks, legs, hybrid) 4 Actuator Components
5 Mid-Term Review Expectations (2) Vehicle stability Slope (up, down, cross) Acceleration/deceleration Turning Combinations of above Terrain ability ( terrainability ) Weight transfer over obstacles Climbing/descending vertical or inclined planes Hang-up limit (e.g., high-centering, wheel capture) 5 Actuator Components
6 Mid-Term Review Reach Goals Suspension dynamics Development of drive actuator requirements Detailed wheel-motor design Development of steering actuator requirements Detailed steering mechanism design Mass budget (with margin) Power budget (with margin) 6 Actuator Components
7 Mechatronics Smart components Combination of (or technologies for) Sensors Actuators Structures and mechanisms Processors and control systems Subsumes microelectromechanical systems (MEMS) 7

8 Ball Bearings 8 Actuator Components
9 Types of Bearings 9 Actuator Components
10 Angular Contact Bearing 10 Actuator Components

11 Ideal Bearing Applications 11 Actuator Components
12 Dual-Row Angular Contact Bearing 12 Actuator Components
13 Thrust Bearing 13 Actuator Components

14 Tapered Roller Bearings 14 Actuator Components

15 Wheel Hub Cutaway 15 Actuator Components
16 O-Ring and Groove 16 Actuator Components

17 Lip Seals 17 Actuator Components


18 Spring Energized Seals 18 Actuator Components

19 Labyrinth Seals 19 Actuator Components
20 Sensor Components An overview of robotic operations Generic discussion of sensor issues Sensor types Proprioceptive (measures robotic interaction with environment) Exteroceptive (measures environment directly, usually remotely) Interoceptive (internal data - engineering quantities) 20

21 Sensing Definitions Resolution Accuracy Precision Repeatability 21
22 Some Notes on Data and Noise Noise is inherent in all data Sampling errors Sensor error Interference and cross-talk For zero-mean noise, Integration reduces noise Differentiation increases noise Use the appropriate sensor for the measurement Don t try to differentiate position for velocity, velocity for acceleration 22
23 Shannon Sampling Limit For discrete measurements, can t reconstruct frequency greater than 1/2 the sampling rate Discretization error creates aliasing errors (frequencies that aren t really there) Signal frequency ƒ signal Sampling frequency ƒ sample Alias frequencies ƒ sample ± ƒ signal 23
24 Analog and Digital Data 1" 0.9" 0.8" 0.7" 0.6" 0.5" 0.4" 0.3" 0.2" 0.1" 0" 0" 20" 40" 60" 80" 100" 120" 24 Analog" Digital"
25 Analog and Digital Data with Noise 1.2% 1% 0.8% 0.6% 0.4% 0.2% 0% 0% 20% 40% 60% 80% 100% 120%!0.2% 25 Analog% Digital%
26 Some Notes on Analog Sensors Analog sensors encode information in voltage (or sometimes current) Intrinsically can have infinite precision on signal measurement Practically limited by noise on line, precision of analog/digital encoder Differentiation between high level (signal variance~volts) and low level (signal variance~millivolts) sensors Advice: never do analog what you can do digitally 26
27 Proprioceptive Sensors Measure internal state of system in the environment Rotary position Linear position Velocity Accelerations Temperature 27
28 Proprioceptive Sensors Position and velocity (encoders, etc.) Location (GPS) Attitude Inertial measurement units (IMU) Accelerometers Horizon sensors Force sensors 28

29 Representative Sensors 29
30 Absolute Encoders Measure absolute rotational position of shaft Should produce unambiguous position even immediately following power-up Rovers typically require continuous rotation sensors General rule of thumb: never do in analog what you can do digitally (due to noise, RF interference, cross-talk, etc.) 30
31 Potentiometers 31
32 Potentiometers Advantages Very simple (three wires) Unambiguous absolute position readout Generally easy to integrate Low cost Disadvantages Analog signal Data gap at transition every revolution Accuracy limited to precision of resistive element Wear on rotating contactor Liable to contamination damage 32

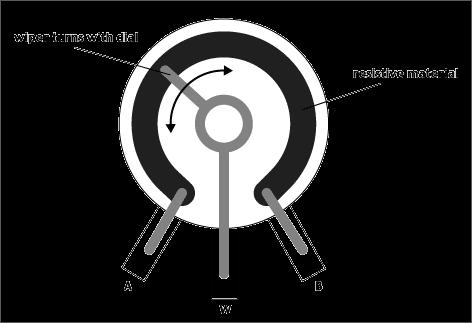
33 Resolvers 33

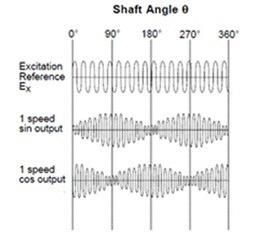
34 Resolvers 34
35 Resolvers Advantages Non-contact (inductively coupled) Unambiguous absolute position reading Similar technology to synchros Disadvantages AC signal Analog Requires dedicated decoding circuitry Expensive 35
36 Rotary Binary Encoder 36
37 Binary Absolute Position Encoders 37
38 Gray Code Absolute Position Encoders 38


39 Absolute Encoder Gray Codes 39
40 Optical Absolute Encoders Advantages No contact (low/no friction) Absolute angular position to limits of resolution 8 bit = 256 positions/rev = 1.4 resolution 16 bit = 65,536 positions = resolution Require decoding (look-up table) of Gray codes Number of wires ~ number of bits plus two 40
41 Magnetic Absolute Encoders Advantages No contact (low/no friction) Absolute angular position to limits of resolution 8 bit = 256 positions/rev = 1.4 resolution 16 bit = 65,536 positions = resolution Robust to launch loads Require decoding (frequently on chip) Choice of output reading formats (analog, serial, parallel) 41
42 Incremental Encoders Measure change in position, not position directly Have to be integrated to produce position Require absolute reference (index pulse) to calibrate Can be used to calculate velocities Generally optical or magnetic (no contact) 42
43 Incremental Encoder Principles 43
44 Quadrature Incremental Encoder 44
45 Incremental Encoder Interpretation Position Count up/down based on quadrature (finite state machine) Resolution based on location, gearing, speed 256 pulse encoder (1024 with quadrature) Output side 0.35 deg Input side 160:1 gearing deg = 7.9 arcsec Velocity Pulses/time period High precision for large number of pulses (high speed) 90 deg/sec, input side 41 pulses/msec (2.5% error) Time/counts High precision for long time between pulses (low speed) 1 deg/sec, output side 350 msec/pulse 45
46 Quadrature Direction Sensing 46
47 Velocity Measurement Number of bits/unit time High precision for rapid rotation Low resolution at slow rotation For n bit encoder reading k bits/interval Amount of time between encoder bits High precision for rapid rotation Low resolution for slow rotation! = k 2 n 2 47 t CLK h rad sec i! = n h rad t pulses sec i

48 Linear Variable Displacement Transformer 48
49 LRV Wheel Motor and Gearing 49 Case Study Lunar Roving Vehicle
Smart off axis absolute position sensor solution and UTAF piezo motor enable closed loop control of a miniaturized Risley prism pair
 Smart off axis absolute position sensor solution and UTAF piezo motor enable closed loop control of a miniaturized Risley prism pair By David Cigna and Lisa Schaertl, New Scale Technologies Hall effect
Smart off axis absolute position sensor solution and UTAF piezo motor enable closed loop control of a miniaturized Risley prism pair By David Cigna and Lisa Schaertl, New Scale Technologies Hall effect
10/21/2009. d R. d L. r L d B L08. POSE ESTIMATION, MOTORS. EECS 498-6: Autonomous Robotics Laboratory. Midterm 1. Mean: 53.9/67 Stddev: 7.
 1 d R d L L08. POSE ESTIMATION, MOTORS EECS 498-6: Autonomous Robotics Laboratory r L d B Midterm 1 2 Mean: 53.9/67 Stddev: 7.73 1 Today 3 Position Estimation Odometry IMUs GPS Motor Modelling Kinematics:
1 d R d L L08. POSE ESTIMATION, MOTORS EECS 498-6: Autonomous Robotics Laboratory r L d B Midterm 1 2 Mean: 53.9/67 Stddev: 7.73 1 Today 3 Position Estimation Odometry IMUs GPS Motor Modelling Kinematics:
Application Note Using MagAlpha Devices to Replace Optical Encoders
 Application Note Using MagAlpha Devices to Replace Optical Encoders Introduction The standard way to measure the angular position or speed of a rotating shaft is to use an optical encoder. Optical encoders
Application Note Using MagAlpha Devices to Replace Optical Encoders Introduction The standard way to measure the angular position or speed of a rotating shaft is to use an optical encoder. Optical encoders
Water Meter Basics Incremental encoders
 Water Meter Basics Measuring flow can be accomplished in a number of ways. For residential applications, the two most common approaches are turbine and positive displacement technologies. The turbine meters
Water Meter Basics Measuring flow can be accomplished in a number of ways. For residential applications, the two most common approaches are turbine and positive displacement technologies. The turbine meters
CS545 Contents XIV. Components of a Robotic System. Signal Processing. Reading Assignment for Next Class
 CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
ACTUATORS AND SENSORS. Joint actuating system. Servomotors. Sensors
 ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
Robotic Vehicle Design
 Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 2008 1of 14 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary
Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 2008 1of 14 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary
Shaft encoders are digital transducers that are used for measuring angular displacements and angular velocities.
 Shaft Encoders: Shaft encoders are digital transducers that are used for measuring angular displacements and angular velocities. Encoder Types: Shaft encoders can be classified into two categories depending
Shaft Encoders: Shaft encoders are digital transducers that are used for measuring angular displacements and angular velocities. Encoder Types: Shaft encoders can be classified into two categories depending
Lecture 5. In The Name of Allah. Instrumentation. Dr. Ali Karimpour Associate Professor Ferdowsi University of Mashhad
 In The Name of Allah Instrumentation Dr. Ali Karimpour Associate Professor Ferdowsi University of Mashhad Position Sensors Topics to be covered include: v v v v v v Introduction Resistive Displacement
In The Name of Allah Instrumentation Dr. Ali Karimpour Associate Professor Ferdowsi University of Mashhad Position Sensors Topics to be covered include: v v v v v v Introduction Resistive Displacement
Where: (J LM ) is the load inertia referred to the motor shaft. 8.0 CONSIDERATIONS FOR THE CONTROL OF DC MICROMOTORS. 8.
 is the load inertia referred to the motor shaft. 8.0 CONSIDERATIONS FOR THE CONTROL OF DC MICROMOTORS. 8.") Where: (J LM ) is the load inertia referred to the motor shaft. 8.0 CONSIDERATIONS FOR THE CONTROL OF DC MICROMOTORS 8.1 General Comments Due to its inherent qualities the Escap micromotor is very suitable
Where: (J LM ) is the load inertia referred to the motor shaft. 8.0 CONSIDERATIONS FOR THE CONTROL OF DC MICROMOTORS 8.1 General Comments Due to its inherent qualities the Escap micromotor is very suitable
Robotic Vehicle Design
 Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 19, 2005 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary Sensor
Robotic Vehicle Design Sensors, measurements and interfacing Jim Keller July 19, 2005 Sensor Design Types Topology in system Specifications/Considerations for Selection Placement Estimators Summary Sensor
Job Sheet 2 Servo Control
 Job Sheet 2 Servo Control Electrical actuators are replacing hydraulic actuators in many industrial applications. Electric servomotors and linear actuators can perform many of the same physical displacement
Job Sheet 2 Servo Control Electrical actuators are replacing hydraulic actuators in many industrial applications. Electric servomotors and linear actuators can perform many of the same physical displacement
Mechatronics System Design - Sensors
 Mechatronics System Design - Sensors Aim of this class 1. The functional role of the sensor? 2. Displacement, velocity and visual sensors? 3. An integrated example-smart car with visual and displacement
Mechatronics System Design - Sensors Aim of this class 1. The functional role of the sensor? 2. Displacement, velocity and visual sensors? 3. An integrated example-smart car with visual and displacement
COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING
 COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING COURSE: MCE 527 DISCLAIMER The contents of this document are intended for practice and leaning purposes at the
COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING COURSE: MCE 527 DISCLAIMER The contents of this document are intended for practice and leaning purposes at the
Sensors. human sensing. basic sensory. advanced sensory. 5+N senses <link> tactile touchless (distant) virtual. e.g. camera, radar / lidar, MS Kinect
 virtual. e.g. camera, radar / lidar, MS Kinect") Sensors human sensing 5+N senses basic sensory tactile touchless (distant) virtual advanced sensory e.g. camera, radar / lidar, MS Kinect Human senses Traditional sight smell taste touch hearing
Sensors human sensing 5+N senses basic sensory tactile touchless (distant) virtual advanced sensory e.g. camera, radar / lidar, MS Kinect Human senses Traditional sight smell taste touch hearing
Incremental encoders, absolute encoders & pseudo-absolute encoders
 T E C H N I C A L W H I T E P A P E R Incremental encoders, absolute encoders & pseudo-absolute encoders Author: Mark Howard, General Manager, Zettlex UK Ltd File ref: technical articles/incremental encoders
T E C H N I C A L W H I T E P A P E R Incremental encoders, absolute encoders & pseudo-absolute encoders Author: Mark Howard, General Manager, Zettlex UK Ltd File ref: technical articles/incremental encoders
Lecture 5. In The Name of Allah. Instrumentation. Dr. Ali Karimpour Associate Professor Ferdowsi University of Mashhad
 In The Name of Allah Instrumentation Dr. Ali Karimpour Associate Professor Ferdowsi University of Mashhad Position Sensors Topics to be covered include: v v v v v v Introduction Resistive Displacement
In The Name of Allah Instrumentation Dr. Ali Karimpour Associate Professor Ferdowsi University of Mashhad Position Sensors Topics to be covered include: v v v v v v Introduction Resistive Displacement
Administrative Notes. DC Motors; Torque and Gearing; Encoders; Motor Control. Today. Early DC Motors. Friday 1pm: Communications lecture
 At Actuation: ti DC Motors; Torque and Gearing; Encoders; Motor Control RSS Lecture 3 Wednesday, 11 Feb 2009 Prof. Seth Teller Administrative Notes Friday 1pm: Communications lecture Discuss: writing up
At Actuation: ti DC Motors; Torque and Gearing; Encoders; Motor Control RSS Lecture 3 Wednesday, 11 Feb 2009 Prof. Seth Teller Administrative Notes Friday 1pm: Communications lecture Discuss: writing up
Technical Cognitive Systems
 Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
Position and Velocity Sensors
 Position and Velocity Sensors Introduction: A third type of sensor which is commonly used is a speed or position sensor. Position sensors are required when the location of an object is to be controlled.
Position and Velocity Sensors Introduction: A third type of sensor which is commonly used is a speed or position sensor. Position sensors are required when the location of an object is to be controlled.
GPS-Aided INS Datasheet Rev. 2.6
 GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
New Long Stroke Vibration Shaker Design using Linear Motor Technology
 New Long Stroke Vibration Shaker Design using Linear Motor Technology The Modal Shop, Inc. A PCB Group Company Patrick Timmons Calibration Systems Engineer Mark Schiefer Senior Scientist Long Stroke Shaker
New Long Stroke Vibration Shaker Design using Linear Motor Technology The Modal Shop, Inc. A PCB Group Company Patrick Timmons Calibration Systems Engineer Mark Schiefer Senior Scientist Long Stroke Shaker
As before, the speed resolution is given by the change in speed corresponding to a unity change in the count. Hence, for the pulse-counting method
 Velocity Resolution with Step-Up Gearing: As before, the speed resolution is given by the change in speed corresponding to a unity change in the count. Hence, for the pulse-counting method It follows that
Velocity Resolution with Step-Up Gearing: As before, the speed resolution is given by the change in speed corresponding to a unity change in the count. Hence, for the pulse-counting method It follows that
Advanced Measurements
 Albaha University Faculty of Engineering Mechanical Engineering Department Lecture 5: Displacement measurement Ossama Abouelatta o_abouelatta@yahoo.com Mechanical Engineering Department Faculty of Engineering
Albaha University Faculty of Engineering Mechanical Engineering Department Lecture 5: Displacement measurement Ossama Abouelatta o_abouelatta@yahoo.com Mechanical Engineering Department Faculty of Engineering
Position Sensors. The Potentiometer.
 Position Sensors In this tutorial we will look at a variety of devices which are classed as Input Devices and are therefore called "Sensors" and in particular those sensors which are Positional in nature
Position Sensors In this tutorial we will look at a variety of devices which are classed as Input Devices and are therefore called "Sensors" and in particular those sensors which are Positional in nature
RM36. Rotation sensors RM36 Absolute rotary encoder
 Rotation sensors RM36 Absolute rotary encoder RM36 Description The RM36 is a high-speed magnetic rotary encoder designed for use in harsh industrial environments. The non-contact two-part design removes
Rotation sensors RM36 Absolute rotary encoder RM36 Description The RM36 is a high-speed magnetic rotary encoder designed for use in harsh industrial environments. The non-contact two-part design removes
Categories of Robots and their Hardware Components. Click to add Text Martin Jagersand
 Categories of Robots and their Hardware Components Click to add Text Martin Jagersand Click to add Text Robot? Click to add Text Robot? How do we categorize these robots? What they can do? Most robots
Categories of Robots and their Hardware Components Click to add Text Martin Jagersand Click to add Text Robot? Click to add Text Robot? How do we categorize these robots? What they can do? Most robots
Tektronix AFG10022 Function Generator. Coming soon to B10: Sin, Square, Ramp, Swept, Arbitrary, Noise. Linear Actuators. Non-magnetized iron plunger
 4/19/18 Tektronix AFG10022 Function Generator Coming soon to B10: Sin, Square, Ramp, Swept, Arbitrary, Noise 508 Linear Actuators Solenoids (stationary coil) Non-magnetized iron plunger Iron always pulled
4/19/18 Tektronix AFG10022 Function Generator Coming soon to B10: Sin, Square, Ramp, Swept, Arbitrary, Noise 508 Linear Actuators Solenoids (stationary coil) Non-magnetized iron plunger Iron always pulled
09-2 EE 4770 Lecture Transparency. Formatted 12:49, 19 February 1998 from lsli
 09-1 09-1 Displacement and Proximity Displacement transducers measure the location of an object. Proximity transducers determine when an object is near. Criteria Used in Selection of Transducer How much
09-1 09-1 Displacement and Proximity Displacement transducers measure the location of an object. Proximity transducers determine when an object is near. Criteria Used in Selection of Transducer How much
Industrial Sensors. Proximity Mechanical Optical Inductive/Capacitive. Position/Velocity Potentiometer LVDT Encoders Tachogenerator
 Proximity Mechanical Optical Inductive/Capacitive Position/Velocity Potentiometer LVDT Encoders Tachogenerator Force/Pressure Vibration/acceleration Industrial Sensors 1 Definitions Accuracy: The agreement
Proximity Mechanical Optical Inductive/Capacitive Position/Velocity Potentiometer LVDT Encoders Tachogenerator Force/Pressure Vibration/acceleration Industrial Sensors 1 Definitions Accuracy: The agreement
Interfacing dspace to the Quanser Rotary Series of Experiments (SRV02ET)
") Interfacing dspace to the Quanser Rotary Series of Experiments (SRV02ET) Nicanor Quijano and Kevin M. Passino The Ohio State University, Department of Electrical Engineering, 2015 Neil Avenue, Columbus
Interfacing dspace to the Quanser Rotary Series of Experiments (SRV02ET) Nicanor Quijano and Kevin M. Passino The Ohio State University, Department of Electrical Engineering, 2015 Neil Avenue, Columbus
MA3. Miniature Absolute Magnetic Shaft Encoder Page 1 of 8. Description. Order Using #MA3 starting at $36.00 per unit. Features
 Page 1 of 8 Description The MA3 is a miniature rotary absolute shaft encoder that reports the shaft position over 360 with no stops or gaps. The MA3 is available with an analog or a pulse width modulated
Page 1 of 8 Description The MA3 is a miniature rotary absolute shaft encoder that reports the shaft position over 360 with no stops or gaps. The MA3 is available with an analog or a pulse width modulated
Sloshing Damping Control in a Cylindrical Container on a Wheeled Mobile Robot Using Dual-Swing Active-Vibration Reduction
 Sloshing Damping Control in a Cylindrical Container on a Wheeled Mobile Robot Using Dual-Swing Active-Vibration Reduction Masafumi Hamaguchi and Takao Taniguchi Department of Electronic and Control Systems
Sloshing Damping Control in a Cylindrical Container on a Wheeled Mobile Robot Using Dual-Swing Active-Vibration Reduction Masafumi Hamaguchi and Takao Taniguchi Department of Electronic and Control Systems
Sensors (Transducer) Introduction By Sintayehu Challa
 Introduction By Sintayehu Challa") Sensors (Transducer) Introduction What are Sensors? Basically the quantities to be measured are Non-Electrical quantities such as temperature, pressure,displacement,humidity, fluid flow, speed etc, but
Sensors (Transducer) Introduction What are Sensors? Basically the quantities to be measured are Non-Electrical quantities such as temperature, pressure,displacement,humidity, fluid flow, speed etc, but
EEE 187: Robotics. Summary 11: Sensors used in Robotics
 1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
1 EEE 187: Robotics Summary 11: Sensors used in Robotics Fig. 1. Sensors are needed to obtain internal quantities such as joint angle and external information such as location in maze Sensors are used
Development of intelligent systems
 Development of intelligent systems (RInS) Robot sensors Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Academic year: 2017/18 Development of intelligent systems Robotic
Development of intelligent systems (RInS) Robot sensors Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Academic year: 2017/18 Development of intelligent systems Robotic
How to Select the Right Positioning Sensor Solution A WHITE PAPER
 How to Select the Right Positioning Sensor Solution A WHITE PAPER Published 10/1/2012 Today s machinery and equipment are continuously evolving, designed to enhance efficiency and built to withstand harsher
How to Select the Right Positioning Sensor Solution A WHITE PAPER Published 10/1/2012 Today s machinery and equipment are continuously evolving, designed to enhance efficiency and built to withstand harsher
PRESENTED BY HUMANOID IIT KANPUR
 SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
Introduction to Measurement Systems
 MFE 3004 Mechatronics I Measurement Systems Dr Conrad Pace Page 4.1 Introduction to Measurement Systems Role of Measurement Systems Detection receive an external stimulus (ex. Displacement) Selection measurement
MFE 3004 Mechatronics I Measurement Systems Dr Conrad Pace Page 4.1 Introduction to Measurement Systems Role of Measurement Systems Detection receive an external stimulus (ex. Displacement) Selection measurement
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
R30D RVDTs DC-Operated Rotary Variable Differential Transformers
 R30D RVDTs DC-Operated Rotary Variable Differential Transformers RVDTs incorporate a proprietary noncontact design that dramatically improves long term reliability when compared to other traditional rotary
R30D RVDTs DC-Operated Rotary Variable Differential Transformers RVDTs incorporate a proprietary noncontact design that dramatically improves long term reliability when compared to other traditional rotary
Dimensions: Specifications:
 Rover 5 Rover 5 is a new breed of tracked robot chassis designed specifically for students and hobbyist. Unlike conventional tracked chassis s the clearance can be adjusted by rotating the gearboxes in
Rover 5 Rover 5 is a new breed of tracked robot chassis designed specifically for students and hobbyist. Unlike conventional tracked chassis s the clearance can be adjusted by rotating the gearboxes in
CNC Machine Feedback Devices
 CNC Machine Feedback Devices Operational Features of CNC Machine A CNC control system includes a velocity loop within an axis drive system and a position loop external to the axis drive system. Lecture
CNC Machine Feedback Devices Operational Features of CNC Machine A CNC control system includes a velocity loop within an axis drive system and a position loop external to the axis drive system. Lecture
DC motor control using arduino
 DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
MAGNETIC LEVITATION SUSPENSION CONTROL SYSTEM FOR REACTION WHEEL
 IMPACT: International Journal of Research in Engineering & Technology (IMPACT: IJRET) ISSN 2321-8843 Vol. 1, Issue 4, Sep 2013, 1-6 Impact Journals MAGNETIC LEVITATION SUSPENSION CONTROL SYSTEM FOR REACTION
IMPACT: International Journal of Research in Engineering & Technology (IMPACT: IJRET) ISSN 2321-8843 Vol. 1, Issue 4, Sep 2013, 1-6 Impact Journals MAGNETIC LEVITATION SUSPENSION CONTROL SYSTEM FOR REACTION
Embedded Systems Lecture 2: Interfacing with the Environment. Björn Franke University of Edinburgh
 Embedded Systems Lecture 2: Interfacing with the Environment Björn Franke University of Edinburgh Overview Interfacing with the Physical Environment Signals, Discretisation Input (Sensors) Output (Actuators)
Embedded Systems Lecture 2: Interfacing with the Environment Björn Franke University of Edinburgh Overview Interfacing with the Physical Environment Signals, Discretisation Input (Sensors) Output (Actuators)
An Example of robots with their sensors
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MODEL S15 Incremental Optical Rotary Encoder
 MODEL S15 Incremental Optical Rotary Encoder Up to 200 KHz frequency response all channels Small compact size: 1.51 diameter 1.00 dia. Bolt circle mount Resolutions up to 12,500 cycles / revolution ( 50,000
MODEL S15 Incremental Optical Rotary Encoder Up to 200 KHz frequency response all channels Small compact size: 1.51 diameter 1.00 dia. Bolt circle mount Resolutions up to 12,500 cycles / revolution ( 50,000
Feedback Devices. By John Mazurkiewicz. Baldor Electric
 Feedback Devices By John Mazurkiewicz Baldor Electric Closed loop systems use feedback signals for stabilization, speed and position information. There are a variety of devices to provide this data, such
Feedback Devices By John Mazurkiewicz Baldor Electric Closed loop systems use feedback signals for stabilization, speed and position information. There are a variety of devices to provide this data, such
Angular Position Transducers. inductive magnetoresistive optoelectronic
 Angular Position Transducers inductive magnetoresistive optoelectronic Angular Position Transducers with inductive, magnetoresistive or optoelectronic measuring systems Construction Measuring systems For
Angular Position Transducers inductive magnetoresistive optoelectronic Angular Position Transducers with inductive, magnetoresistive or optoelectronic measuring systems Construction Measuring systems For
Application Note 01 - The Electric Encoder
 Application Note 01 - The Electric Encoder DF Product Lines - Angular Position Sensors Document No.: AN-01 Version: 3.0, July 2016 Netzer Precision Motion Sensors Ltd. Misgav Industrial Park, P.O. Box
Application Note 01 - The Electric Encoder DF Product Lines - Angular Position Sensors Document No.: AN-01 Version: 3.0, July 2016 Netzer Precision Motion Sensors Ltd. Misgav Industrial Park, P.O. Box
5. Transducers Definition and General Concept of Transducer Classification of Transducers
 5.1. Definition and General Concept of Definition The transducer is a device which converts one form of energy into another form. Examples: Mechanical transducer and Electrical transducer Electrical A
5.1. Definition and General Concept of Definition The transducer is a device which converts one form of energy into another form. Examples: Mechanical transducer and Electrical transducer Electrical A
Zettlex. Precision in the Extreme
 Zettlex is a sensors company. We design, make and sell sensors & sensor components for position and speed measurement. Flow metering Our company motto is signifying that even in harsh environments, our
Zettlex is a sensors company. We design, make and sell sensors & sensor components for position and speed measurement. Flow metering Our company motto is signifying that even in harsh environments, our
Navigation problem. Jussi Suomela
 Navigation problem Define internal navigation sensors for a ground robot with car type kinematics (4 wheels + ackerman steering + rear wheel drive) Sensors? Where? Why? ~ 15-20 min. Describe your system
Navigation problem Define internal navigation sensors for a ground robot with car type kinematics (4 wheels + ackerman steering + rear wheel drive) Sensors? Where? Why? ~ 15-20 min. Describe your system
Robot Actuators. Motors and Control. Stepper Motor Basics. Increased Resolution. Stepper motors. DC motors AC motors. Physics review: Nature is lazy.
 obot Actuators tepper motors Motors and Control DC motors AC motors Physics review: ature is lazy. Things seek lowest energy states. iron core vs. magnet magnetic fields tend to line up Electric fields
obot Actuators tepper motors Motors and Control DC motors AC motors Physics review: ature is lazy. Things seek lowest energy states. iron core vs. magnet magnetic fields tend to line up Electric fields
Whitepaper EncoderBlue goes reflective
 Whitepaper EncoderBlue goes reflective With the continuously increasing adoption of automated machinery in various applications, positioning devices are becoming an essential part of many systems. For
Whitepaper EncoderBlue goes reflective With the continuously increasing adoption of automated machinery in various applications, positioning devices are becoming an essential part of many systems. For
Intelligent Robotics Sensors and Actuators
 Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Intelligent Robotics Sensors and Actuators Luís Paulo Reis (University of Porto) Nuno Lau (University of Aveiro) The Perception Problem Do we need perception? Complexity Uncertainty Dynamic World Detection/Correction
Electronic Systems - B1 23/04/ /04/ SisElnB DDC. Chapter 2
 Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
ELECTRONIC SYSTEMS. Introduction. B1 - Sensors and actuators. Introduction
 Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
An Example of robots with their sensors
 ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
GPS-Aided INS Datasheet Rev. 2.3
 GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
Data Sheet. AEAT-6600-T16 10 to16-bit Programmable Angular Magnetic Encoder IC. Description. Features. Specifications.
 AEAT-6600-T16 10 to16-bit Programmable Angular Magnetic Encoder IC Data Sheet Description The Avago AEAT-6600 angular magnetic encoder IC is a contact less magnetic rotary encoder for accurate angular
AEAT-6600-T16 10 to16-bit Programmable Angular Magnetic Encoder IC Data Sheet Description The Avago AEAT-6600 angular magnetic encoder IC is a contact less magnetic rotary encoder for accurate angular
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Computer Numeric Control
 Computer Numeric Control TA202A 2017-18(2 nd ) Semester Prof. J. Ramkumar Department of Mechanical Engineering IIT Kanpur Computer Numeric Control A system in which actions are controlled by the direct
Computer Numeric Control TA202A 2017-18(2 nd ) Semester Prof. J. Ramkumar Department of Mechanical Engineering IIT Kanpur Computer Numeric Control A system in which actions are controlled by the direct
Glossary. Glossary Engineering Reference. 35
 Glossary Engineering Reference Glossary Abbe error The positioning error resulting from angular motion and an offset between the measuring device and the point of interest. Abbe offset The value of the
Glossary Engineering Reference Glossary Abbe error The positioning error resulting from angular motion and an offset between the measuring device and the point of interest. Abbe offset The value of the
SELF-BALANCING MOBILE ROBOT TILTER
 Tomislav Tomašić Andrea Demetlika Prof. dr. sc. Mladen Crneković ISSN xxx-xxxx SELF-BALANCING MOBILE ROBOT TILTER Summary UDC 007.52, 62-523.8 In this project a remote controlled self-balancing mobile
Tomislav Tomašić Andrea Demetlika Prof. dr. sc. Mladen Crneković ISSN xxx-xxxx SELF-BALANCING MOBILE ROBOT TILTER Summary UDC 007.52, 62-523.8 In this project a remote controlled self-balancing mobile
Controlling and modeling of an automated guided vehicle
 Controlling and modeling of an automated guided vehicle Daniel Antal, Ph.D. student Robert Bosch department of mechatronics University of Miskolc Miskolc, Hungary antal.daniel@uni-miskolc.hu Tamás Szabó,
Controlling and modeling of an automated guided vehicle Daniel Antal, Ph.D. student Robert Bosch department of mechatronics University of Miskolc Miskolc, Hungary antal.daniel@uni-miskolc.hu Tamás Szabó,
A Comparison of Performance Characteristics of On and Off Axis High Resolution Hall Effect Encoder ICs
 A Comparison of Performance Characteristics of On and Off Axis High Resolution Hall Effect Encoder ICs Sensor Products Mark LaCroix A John Santos Dr. Lei Wang 8 FEB 13 Orlando Originally Presented at the
A Comparison of Performance Characteristics of On and Off Axis High Resolution Hall Effect Encoder ICs Sensor Products Mark LaCroix A John Santos Dr. Lei Wang 8 FEB 13 Orlando Originally Presented at the
Sensors. Chapter 3. Storey: Electrical & Electronic Systems Pearson Education Limited 2004 OHT 3.1
 Sensors Chapter 3 Introduction Describing Sensor Performance Temperature Sensors Light Sensors Force Sensors Displacement Sensors Motion Sensors Sound Sensors Sensor Interfacing Storey: Electrical & Electronic
Sensors Chapter 3 Introduction Describing Sensor Performance Temperature Sensors Light Sensors Force Sensors Displacement Sensors Motion Sensors Sound Sensors Sensor Interfacing Storey: Electrical & Electronic
PRODUCTS AND LAB SOLUTIONS
 PRODUCTS AND LAB SOLUTIONS ENGINEERING FUNDAMENTALS NI ELVIS APPLICATION BOARDS Controls Board Energy Systems Board Mechatronic Systems Board with NI ELVIS III Mechatronic Sensors Board Mechatronic Actuators
PRODUCTS AND LAB SOLUTIONS ENGINEERING FUNDAMENTALS NI ELVIS APPLICATION BOARDS Controls Board Energy Systems Board Mechatronic Systems Board with NI ELVIS III Mechatronic Sensors Board Mechatronic Actuators
GPS-Aided INS Datasheet Rev. 3.0
 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
Step vs. Servo Selecting the Best
 Step vs. Servo Selecting the Best Dan Jones Over the many years, there have been many technical papers and articles about which motor is the best. The short and sweet answer is let s talk about the application.
Step vs. Servo Selecting the Best Dan Jones Over the many years, there have been many technical papers and articles about which motor is the best. The short and sweet answer is let s talk about the application.
Analogue Interfacing. What is a signal? Continuous vs. Discrete Time. Continuous time signals
 Analogue Interfacing What is a signal? Signal: Function of one or more independent variable(s) such as space or time Examples include images and speech Continuous vs. Discrete Time Continuous time signals
Analogue Interfacing What is a signal? Signal: Function of one or more independent variable(s) such as space or time Examples include images and speech Continuous vs. Discrete Time Continuous time signals
Lecture#1 Handout. Plant has one or more inputs and one or more outputs, which can be represented by a block, as shown below.
 Lecture#1 Handout Introduction A system or a process or a plant is a segment of environment that is under consideration (working definition). Control is a term that describes the process of forcing a system
Lecture#1 Handout Introduction A system or a process or a plant is a segment of environment that is under consideration (working definition). Control is a term that describes the process of forcing a system
PVA Sensor Specifications
 Position, Velocity, and Acceleration Sensors 24.1 Sections 8.2-8.5 Position, Velocity, and Acceleration (PVA) Sensors PVA Sensor Specifications Good website to start your search for sensor specifications:
Position, Velocity, and Acceleration Sensors 24.1 Sections 8.2-8.5 Position, Velocity, and Acceleration (PVA) Sensors PVA Sensor Specifications Good website to start your search for sensor specifications:
Angular Position Transducers
 Angular Position Transducers Angular Position Transducers Construction Measuring systems For measuring angular positions and converting them into electrical signals for teletransmission purposes, either
Angular Position Transducers Angular Position Transducers Construction Measuring systems For measuring angular positions and converting them into electrical signals for teletransmission purposes, either
Features. Applications. Plastic Housing. Sensor PCB Assembly. Plastic Hub. Plastic Base Plate. 2 x screws
 AEAT61/612 Magnetic Encoder 1 or 12 bit Angular Detection Device Data Sheet Description Avago Technologies AEAT6xx series of magnetic encoders provides an integrated solution for angular detection. With
AEAT61/612 Magnetic Encoder 1 or 12 bit Angular Detection Device Data Sheet Description Avago Technologies AEAT6xx series of magnetic encoders provides an integrated solution for angular detection. With
MOBILE ROBOT LOCALIZATION with POSITION CONTROL
 T.C. DOKUZ EYLÜL UNIVERSITY ENGINEERING FACULTY ELECTRICAL & ELECTRONICS ENGINEERING DEPARTMENT MOBILE ROBOT LOCALIZATION with POSITION CONTROL Project Report by Ayhan ŞAVKLIYILDIZ - 2011502093 Burcu YELİS
T.C. DOKUZ EYLÜL UNIVERSITY ENGINEERING FACULTY ELECTRICAL & ELECTRONICS ENGINEERING DEPARTMENT MOBILE ROBOT LOCALIZATION with POSITION CONTROL Project Report by Ayhan ŞAVKLIYILDIZ - 2011502093 Burcu YELİS
العطاء رقم )7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي
7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي") العطاء رقم )7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي رقم )7107/363( Page 1 of 6 1- Mechatronics Actuators Board & Mechatronics Systems Board with Education Laboratory for
العطاء رقم )7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي رقم )7107/363( Page 1 of 6 1- Mechatronics Actuators Board & Mechatronics Systems Board with Education Laboratory for
Rotary Variable Differential Transformer (RVDT)
") Rotary Variable Differential Transformer (RVDT) Direct TYPICAL APPLICATIONS Flight control actuation / navigation Fuel control / valves Cockpit controls Nose wheel steering systems Missile fin actuation
Rotary Variable Differential Transformer (RVDT) Direct TYPICAL APPLICATIONS Flight control actuation / navigation Fuel control / valves Cockpit controls Nose wheel steering systems Missile fin actuation
GPS-Aided INS Datasheet Rev. 2.7
 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
Design of stepper motor position control system based on DSP. Guan Fang Liu a, Hua Wei Li b
 nd International Conference on Machinery, Electronics and Control Simulation (MECS 17) Design of stepper motor position control system based on DSP Guan Fang Liu a, Hua Wei Li b School of Electrical Engineering,
nd International Conference on Machinery, Electronics and Control Simulation (MECS 17) Design of stepper motor position control system based on DSP Guan Fang Liu a, Hua Wei Li b School of Electrical Engineering,
Evaluation Kit: MPS 160 ASIC. Magneto Encoder ASIC
 Evaluation Kit: MPS 160 ASIC Magneto Encoder ASIC Table of Contents 1. Overview 2. Mounting Instructions 2.1. Sensor Orientation 2.2. Pitch Radius 2.3. Air Gap 3. Magnetic Target 4. Output 4.1. Optional
Evaluation Kit: MPS 160 ASIC Magneto Encoder ASIC Table of Contents 1. Overview 2. Mounting Instructions 2.1. Sensor Orientation 2.2. Pitch Radius 2.3. Air Gap 3. Magnetic Target 4. Output 4.1. Optional
IN THE NAME OF GOD. Instrumentation Term Project. Supervised By: Dr. Hamid D. Taghirad
 IN THE NAME OF GOD Instrumentation Term Project Supervised By: Dr. Hamid D. Taghirad Magnetic position sensor Ehsan Peymani Golnaz Habibi Magnetic Sensor Feature of Magnetic Sensors Advantage - Contact
IN THE NAME OF GOD Instrumentation Term Project Supervised By: Dr. Hamid D. Taghirad Magnetic position sensor Ehsan Peymani Golnaz Habibi Magnetic Sensor Feature of Magnetic Sensors Advantage - Contact
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Advanced Measurements
 Albaha University Faculty of Engineering Mechanical Engineering Department Lecture 3: Position, Displacement, and Level Ossama Abouelatta o_abouelatta@yahoo.com Mechanical Engineering Department Faculty
Albaha University Faculty of Engineering Mechanical Engineering Department Lecture 3: Position, Displacement, and Level Ossama Abouelatta o_abouelatta@yahoo.com Mechanical Engineering Department Faculty
Introducing the Quadrotor Flying Robot
 Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
A COMPARISON STUDY OF THE COMMUTATION METHODS FOR THE THREE-PHASE PERMANENT MAGNET BRUSHLESS DC MOTOR
 A COMPARISON STUDY OF THE COMMUTATION METHODS FOR THE THREE-PHASE PERMANENT MAGNET BRUSHLESS DC MOTOR Shiyoung Lee, Ph.D. Pennsylvania State University Berks Campus Room 120 Luerssen Building, Tulpehocken
A COMPARISON STUDY OF THE COMMUTATION METHODS FOR THE THREE-PHASE PERMANENT MAGNET BRUSHLESS DC MOTOR Shiyoung Lee, Ph.D. Pennsylvania State University Berks Campus Room 120 Luerssen Building, Tulpehocken
dspic30f Quadrature Encoder Interface Module
 DS Digital Signal Controller dspic30f Quadrature Encoder Interface Module 2005 Microchip Technology Incorporated. All Rights Reserved. dspic30f Quadrature Encoder Interface Module 1 Welcome to the dspic30f
DS Digital Signal Controller dspic30f Quadrature Encoder Interface Module 2005 Microchip Technology Incorporated. All Rights Reserved. dspic30f Quadrature Encoder Interface Module 1 Welcome to the dspic30f
Developer Techniques Sessions
 1 Developer Techniques Sessions Physical Measurements and Signal Processing Control Systems Logging and Networking 2 Abstract This session covers the technologies and configuration of a physical measurement
1 Developer Techniques Sessions Physical Measurements and Signal Processing Control Systems Logging and Networking 2 Abstract This session covers the technologies and configuration of a physical measurement
Citrus Circuits Fall Workshop Series. Roborio and Sensors. Paul Ngo and Ellie Hass
 Citrus Circuits Fall Workshop Series Roborio and Sensors Paul Ngo and Ellie Hass Introduction to Sensors Sensor: a device that detects or measures a physical property and records, indicates, or otherwise
Citrus Circuits Fall Workshop Series Roborio and Sensors Paul Ngo and Ellie Hass Introduction to Sensors Sensor: a device that detects or measures a physical property and records, indicates, or otherwise
GPI. Gurley Series 9X25 Rotary Incremental Encoders ABOVE - STANDARD PERFORMANCE. ISO 9001 Certified
 Gurley Series Rotary Incremental Encoders Motion Type: Rotary Usage Grade: Industrial Output: Incremental Max Resolution: 200,000 counts/rev. ABOVE - STANDARD PERFORMANCE The Series 9x25 is a family of
Gurley Series Rotary Incremental Encoders Motion Type: Rotary Usage Grade: Industrial Output: Incremental Max Resolution: 200,000 counts/rev. ABOVE - STANDARD PERFORMANCE The Series 9x25 is a family of
EL6483: Sensors and Actuators
 EL6483: Sensors and Actuators EL6483 Spring 2016 EL6483 EL6483: Sensors and Actuators Spring 2016 1 / 15 Sensors Sensors measure signals from the external environment. Various types of sensors Variety
EL6483: Sensors and Actuators EL6483 Spring 2016 EL6483 EL6483: Sensors and Actuators Spring 2016 1 / 15 Sensors Sensors measure signals from the external environment. Various types of sensors Variety
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
CM6200 MILLING MACHINE
 CM6200 MILLING MACHINE PORTABLE ON - SITE MACHINING SOLUTIONS FOR LARGE FLANGE MACHINING Quality Machine Design Provides Rigid, Power-Packed Performance Extraordinarily rigid design ensures consistent,
CM6200 MILLING MACHINE PORTABLE ON - SITE MACHINING SOLUTIONS FOR LARGE FLANGE MACHINING Quality Machine Design Provides Rigid, Power-Packed Performance Extraordinarily rigid design ensures consistent,
LAB 5: Mobile robots -- Modeling, control and tracking
 LAB 5: Mobile robots -- Modeling, control and tracking Overview In this laboratory experiment, a wheeled mobile robot will be used to illustrate Modeling Independent speed control and steering Longitudinal
LAB 5: Mobile robots -- Modeling, control and tracking Overview In this laboratory experiment, a wheeled mobile robot will be used to illustrate Modeling Independent speed control and steering Longitudinal
SELF STABILIZING PLATFORM
 SELF STABILIZING PLATFORM Shalaka Turalkar 1, Omkar Padvekar 2, Nikhil Chavan 3, Pritam Sawant 4 and Project Guide: Mr Prathamesh Indulkar 5. 1,2,3,4,5 Department of Electronics and Telecommunication,
SELF STABILIZING PLATFORM Shalaka Turalkar 1, Omkar Padvekar 2, Nikhil Chavan 3, Pritam Sawant 4 and Project Guide: Mr Prathamesh Indulkar 5. 1,2,3,4,5 Department of Electronics and Telecommunication,