Experiments of Vision Guided Walking of Humanoid Robot, KHR-2
|
|
|
- Sharyl Dean
- 5 years ago
- Views:
Transcription

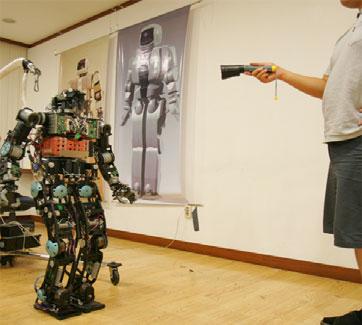
1 Proceedings of th IEEE-RAS International Conference on Humanoid Robots Experiments of Vision Guided Walking of Humanoid Robot, KHR-2 Jung-Yup Kim, Ill-Woo Park, Jungho Lee and Jun-Ho Oh HUBO Laboratory, Humanoid Robot Research Center, Mechanical Engineering, Korea Advanced Institute of Science and Technology, Guseong-dong, Yuseong-gu, Daejeon , South Korea Abstract This paper introduces an integration of vision system and a visual guided walking of humanoid robot as a its application. Two CCD cameras are installed in a head which has 6 DOFs in total. Eyes and neck have the pan and tilt mechanism to move the view direction freely. All joints are driven by DC servo motors. We developed the motor controller to move all joint axes of the head. Each CCD camera transmits the NTSC formatted images to a frame grabber witch is installed on a main computer continuously. And then, the frame grabber captures the image frames in the frequency of 10 ~ 15 Hz. For a basic study, we construct the visual processing algorithm so that the robot can always gaze a red light marker. Besides, we establish the strategy of combining non real-time visual information and real-time walking pattern. Finally, vision guided walking algorithm which enables the robot to follow the red light marker on foot, is tested experimentally by using a humanoid robot, KHR-2. according to user command. Accordingly, we have made an effort to give the intelligent for autonomous walking. To realize the autonomous walking, the vision guided walking can be one of the essential functions. In this paper, we describe a vision system, a mechanical head design, the image processing and a vision guided walking experiment. As a visual sensor, we use the color CCD camera. To move the camera angle freely, we applied pan and tilt mechanism for both eyes and neck. We also developed a motor controller for control all joints of the head. A target tracking algorithm of the robot head is realized. Finally, we show the autonomous walking experiment by using visual target tracking. By this experimental research, we can confirm the good possibility of the vision application for humanoid robots and enhance the intelligence of KHR-2. Index Terms Humanoid robot, KHR-2, Vision, Walking guidance I. INTRODUCTION Recently, biped humanoid robots have been studied intensively by many researchers in various countries [1, 2]. Since these kinds of robots are representative human friendly intelligent robots, people have expected them to perform many functions such as dynamic walking, speaking, visual & image recognizing, human-robot interaction, artificial intelligence, etc. Early researches of biped humanoid robots only focused on the realization of stable dynamic walking because the biped walking is the most fundamental function of them. However, researches of humanoid robots are diverging into the various categories gradually. Particularly, the visual recognition and walking guidance from the image processing are relatively spotlighted research fields of humanoid applications [3-7]. In fact, the machine vision has been already investigated in many research areas long ago. Important thing is that the image processing techniques will much enhance the intelligence of the biped humanoid robot. Until now, we have primarily studied about a realization of stable dynamic walking during the past three years. Consequently, our humanoid robot, KHR-2 (Fig. 1) can walk stably on the uneven terrains with speed of 1.25 km/h [8]. It can walk forward, backward, sideward, turn around and curve. These movements were commanded by user through the wireless LAN. Though the robot has no physical connection, it was not autonomous yet. That is, KHR-2 just moved Fig. 1 The humanoid robot, KHR-2 II. VISION SYSTEM OF KHR-2 A. Stereo CCD Camera KHR-2 has two color CCD cameras. To secure sufficient space for movement in the head, we chose the compact sized cameras. They have a wide visible range and auto white balancing function. The specification of the camera is described in Table. I /05/$ IEEE 135
mm Power consumption 12V@0.25A B. Frame Grabber and Main Computer KHR-2 digitizes the image by using a frame grabber. The frame grabber is installed on a main computer.")
 is Windows XP. Table II and III show the specifications of the frame grabber and main computer respectively.")
/82C686 Expansion PC104+, PC104 and PCI slot Power consumption")
 Audio(Mic in, Speaker out) 2 x USB 1.1 C. Head Design and Motor Controller Fig. 2 shows a head of KHR-2. The total degree of freedom is six.")
2 TABLE I SPECIFICATION OF CAMERA Model GIC-100PC Weight 100 g Imaging sensor 1/4 Color CCD x 2 Image size 640(H) x 480(V) Focal length 3.6 mm Output signal NTSC Dimensions 22(Diameter)mm x 67.5(Depth)mm Power consumption 12V@0.25A B. Frame Grabber and Main Computer KHR-2 digitizes the image by using a frame grabber. The frame grabber is installed on a main computer. Two CCD cameras are connected with it, and then, it transmits the digital images to the computer continuously. The main computer is a commercial single board computer with small size (3.5 inch 2 ). Its OS (Operating system) is Windows XP. Table II and III show the specifications of the frame grabber and main computer respectively. TABLE II SPECIFICATION OF FRAME GRABBER Model Matrox Meteor-II Standard BUS type PC Video source NTSC Number of video inputs 2 Host OS Windows XP Frame rate 30Hz Pixel format 24bit RGB Frame buffer memory 4 Mbyte TABLE III SPECIFICATION OF MAIN COMPUTER CPU EBX Ezra 800 MHz System memory 512 MB Chipset VIA 8606T(Twister T)/82C686 Expansion PC104+, PC104 and PCI slot Power consumption Typical 3.8A, Max 4.5 A Size/Weight EBX form factor, 203 x 146 mm, 0.27 kg 2 x EIDE (Ultra DMA 100), 1 x FDD, 1 x K/B, 1x RS-232/422/485 3 x RS-232, 1 x LPT I/O Ethernet(IEEE 802.3u 100BAS0E-T) Audio(Mic in, Speaker out) 2 x USB 1.1 C. Head Design and Motor Controller Fig. 2 shows a head of KHR-2. The total degree of freedom is six. Each eye and neck joint has 2 DOF (Pan & Tilt mechanism). Actuators are DC motors with planetary gear heads. We also used the pulleys and belts to modify the final reduction ratio and to consider the space efficiency. These actuators are controlled by a motor controller which is developed (Fig. 3). The motor controller controls six DC motors by using PWM (Pulse Width Modulation) and encoder feedback. The capacity of motor amplifier is 48 Watt/ch, so it is sufficient to drive the small DC motors. The motor controller also has CAN(Controller Area Network) module so that it can receive the commands from the main computer and transmit the data to the main computer. Fig. 2 Photograph of the head Fig. 3 Motor controller of head III. GAZE CONTROL A. Control System Architecture The control system architecture of KHR-2 is distributed control system in Windows OS environment so as to reduce the computational burden of the main computer. Besides, it is easy to add the peripherals such as frame grabber, wireless LAN(Local Area Network), CAN interface card and so on. Fig. 4 shows the system configuration of KHR-2. The main computer communicates with the nineteen sub-controllers by CAN protocol. The CAN protocol has the feature of multimaster and multi-slave, so we can easily connect many subcontrollers in the type of daisy chains. Besides, it has very high speed (1Mbps). We have used a RTX(Real-Time extension, VenturCom Co.) which is a commercial software to realize the real-time control environment in Window XP. Fig. 4 Overall system configuration of the KHR-2 136

3 B. Image Processing Architecture We developed the robot operating program by using the visual C++ which is a commercial language software. This program grabs the images continuously but, it is not real-time since the Windows scheduler is not deterministic. We also developed the real-time motion control program which is executed by RTX scheduler. RTX scheduler is deterministic, so it makes the priority of the program highest. Consequently, robot operation and vision capture are working in the foreground (non-real-time), and motion control of the robot is executed in background (real-time). In this manner, the image capture and the processing are performed in robot operating program, and then the results are stored in the shared memory between the robot operating program and real-time motion control program. Finally, the real-time motion program controls the gaze according to the information of the shared memory. Fig. 5 describes the gaze control architecture. Frame grabber Image processing Robot operating program ( Non real-time) Stereo CCD cameras Shared memory Robot head Fig. 5 Gaze control architecture Motor controller Real-Time motion control program (Real-time) Main Computer C. Basic Target Searching Algorithm We developed the basic target searching algorithm to verify the performance of the gaze control architecture. A red light lamp is used as a target. When the image is grabbed, binarization is executed to find red light by using appropriate RGB thresholds. And then, the center position of the red light is calculated by the mass center technique which is very fast and insensitive to the noise. To increase the frame rate, target searching area is variable. If the target disappears in the image, the searching area becomes full size (640 x 480 pixels) of the image. However, once the target is detected, the local searching windows is generated in consider of the object size, the center position and the proper margin (Fig.6). (n) th searching window is used to search the (n+1) th target, so it must enclose the (n+1) th target. By the way, if the velocity of the target is very fast, (n) th searching window may not enclose the (n+1) th target. Therefore, we compensate the center position of the (n) th searching window by calculate the increment between (n-1) th and (n) th target position. Consequently, (n)th searching window position is adjusted by adding the scaled increment so that it can enclose the target perfectly. The target searching flow chart and its experimental example are represented in Fig. 7, 8 respectively. (n-1) th target K p Fig. 6 Local searching window D. Gaze Control To gaze the target all the time, the target position from the image must be kept near the image center (320, 240). Fig. 9 shows control block diagram. Where, P ref is reference position of the target on the image, P target is target position on the image. K I,n and K p,n are integral gain and proportional gain of the position control of the neck. K I,e and K p,e are integral gain and proportional gain of the position control of the eyes. In this diagram, we use the low pass filter for the neck control. This is because the response of the neck joint is slow. That is, the mass moment of inertia is large for neck joint. However, we do not use the low pass filer for eye control since it has very small mass moment of inertia. Local searching window maker Compensated (n) th searching window (n) th target (n+1) th target (n-1) th searching window (n) th searching window Image capture Already target was detected? Yes Local searching Binarization Calculate center position and area of the target Fig. 7 Target searching flow chart No Global searching 137

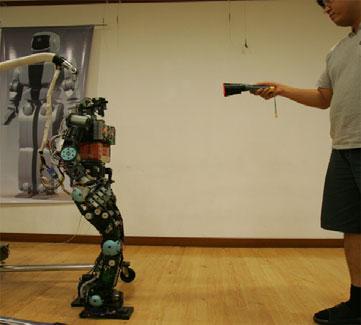
4 Detected Target Binarized Image the turning angle is 10 deg/step and curve angle is 10 deg/step respectively. Fig. 12 shows the sequential photographs that the robot follows the man who has the red light target. The time interval between the photos is 0.75 sec. Fig. 12 (a)~(d) show the robot is approaching the target according to the schedule. It is seen that the vision guided walking is successfully done. Local Searching Window P err, x P err, y LPF a s + a Fig. 8 Example of target searching K I, n + K s p, n Pixels P ref + - P err K I, e + K s p, e θ neck θeyes HEAD P target Time(10 msec) Fig. 9 Block diagram of the gaze control Fig. 10 Tracking error diagram IV. VISION GUIDED WALKING EXPERIMENT A. Experiment of Gaze Control We tested the performance of the gaze control. In the gaze control, only one CCD camera is used in the experiment, and the other CCD camera gaze the same direction with the one. Fig. 10 describes the tracking error (P err ) and Fig. 11 shows roll/pitch angles of the neck and eyes when the red light target is circling with the speed of 30 RPM(round per minute) with the radius of 10 cm at 30cm in front of the camera. x is horizontal axis and y is vertical axis on the vision image. The maximum pixel errors on 640 x 480 pixels image are about ± 70 in x-dir and ± 100 in y-dir. It is easily seen that the each value is sufficient inside of the image boundaries ( ± 320 in x- dir, ± 240 in y-dir). The error curves are not somewhat smooth because the visual image processing is not real-time. However, the motions of the head joints are smooth so as to accomplish nice gaze control in real-time. Finally, these graphs show the successful gaze control. B. Experiment of Vision Guided Walking We scheduled the walking pattern in Table IV. In this manner, the robot always be standstill a specific prescribed distance in front of the target. We measured the distance between the robot and target by means of the number of detected pixels. Hence, before the test, we calibrated the relation between distance and number of detected pixels. In the experiment, the turning angle, curve angle, forward step length and backward step length are constant. The forward step length is 150 mm, the backward step length is 100 mm, Angle (Deg) Yawing Angle of Gaze (deg) Pitching angle of eye Yawing angle of eye Pitching angle of neck Yawing angle of neck Time (sec) Fig. 11 Orientation of eyes and neck TABLE IV SCHEDULE OF WALKING PATTERN FROM VISUAL INFORMATION 15 < θ y -15 θ <15 < y -15 > θ y N p <2000 Curve (CW) forward Curve (CCW) Number of Detected Pixel ( N p ) 2000<N p< 6000 Turn around (CW) Stand still Turn around (CCW) N p > 6000 backward backward backward 138


")
")




5 (a) Vision guided forward walking (b) Vision guided backward walking (c) Vision guided turning around 139



![Finally, we tested the vision guided walking, and it was successfully accomplished. [4] O. Lorch, A. Albert, J. Denk, M. Gerecke, R. Cupec, J. F. Seara, W. Gerth and G.](/docs-images/96/128487742/images/6-3.jpg "Schmidt, Experiments in Vision-Guided Biped Walking, in Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2484-2490, 2002. [5] S. Kagami, K. Nishiwaki, J. J. Kuffner Jr., Y.")

![Takanishi, Interactive Biped Locomotion Based on Visual/Auditory Information in Proc. IEEE Int. Workshop on Robot and Human Interactive Communication, pp. 253-258, 2002. [7] K. Nishiwaki, S.](/docs-images/96/128487742/images/6-5.jpg "Kagami, J. J. Kuffner, M. Inaba and H. Inoue, Online Humanoid Walking Control System and a Moving al Tracking Experiment, in Proc. IEEE Int. Conf. on Robotics and Automation, pp. 911-916, 2003. [8] J.")
 and partly supported by HWRS (Human Welfare Robotic System), IRRC (Intelligent Robot")
6 (d) Vision guided curved walking Fig. 12 Sequential photographs of vision guided walking V. CONCLUSION The vision system of the humanoid robot KHR-2 and vision guided walking were presented. The stereo color CCD camera, frame grabber and small main computer were used to capture the images and execute the image processing. The overall control system of KHR-2 was established. We designed the robot head and motor control board to carry out the gaze control. The image processing architecture was also built for combining the visual data with the motion of the robot. For experiments, the basic target searching algorithm which distinguishes the specific color object from the image was made. We designed control block diagram using the PI controllers to gaze the target all the time. The performance of the gaze control was verified experimentally. To realize the vision guided walking, the schedule of walking pattern according to the visual information was defined. Finally, we tested the vision guided walking, and it was successfully accomplished. [4] O. Lorch, A. Albert, J. Denk, M. Gerecke, R. Cupec, J. F. Seara, W. Gerth and G. Schmidt, Experiments in Vision-Guided Biped Walking, in Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp , [5] S. Kagami, K. Nishiwaki, J. J. Kuffner Jr., Y. Kuniyoshi, M. Inaba and H. Inoue, Online 3D Vision, Motion Planning and Biped Locomotion Control Coupling System of Humanoid Robot : H7, in Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp , [6] Y. Ogura, Y. Sugahara, Y. Kaneshima, N. Hieda, H. Lim and A. Takanishi, Interactive Biped Locomotion Based on Visual/Auditory Information in Proc. IEEE Int. Workshop on Robot and Human Interactive Communication, pp , [7] K. Nishiwaki, S. Kagami, J. J. Kuffner, M. Inaba and H. Inoue, Online Humanoid Walking Control System and a Moving al Tracking Experiment, in Proc. IEEE Int. Conf. on Robotics and Automation, pp , [8] J. Y. Kim, I. W. Park, J. Lee, M. S. Kim, B. K. Cho and J. H. Oh, System Design and Dynamic Walking of Humanoid Robot KHR-2, in Proc. IEEE Int. Conf. on Robotics and Automation, pp , ACKNOWLEDGMENT This research is mainly supported by KAIST (Korea Advanced Institute of Science and Technology) and partly supported by HWRS (Human Welfare Robotic System), IRRC (Intelligent Robot Research Center) and BK-21 (Brain Korea - 21) project. REFERENCES [1] K. Hirai, M. Hirose, Y. Haikawa, and T. Takenaka, The Development of Honda Humanoid Robot, in Proc. IEEE Int. Conf. on Robotics and Automations, pp , [2] Y. Sakagami, R. Watanabe, C. Aoyama, S. Matsunaga, N. Higaki, and K. Fujimura, The intelligent ASIMO: System overview and integration, in Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp , [3] S. Hashimoto, Vision System for Humanoid Robot Toward Emotional Man-Machine-Environment Interaction-, in 2 nd Int. Conf. on Knowledge-Based Intelligent Electronic Systems, pp ,
Mechanical Design of Humanoid Robot Platform KHR-3 (KAIST Humanoid Robot - 3: HUBO) *
 *") Proceedings of 2005 5th IEEE-RAS International Conference on Humanoid Robots Mechanical Design of Humanoid Robot Platform KHR-3 (KAIST Humanoid Robot - 3: HUBO) * Ill-Woo Park, Jung-Yup Kim, Jungho Lee
Proceedings of 2005 5th IEEE-RAS International Conference on Humanoid Robots Mechanical Design of Humanoid Robot Platform KHR-3 (KAIST Humanoid Robot - 3: HUBO) * Ill-Woo Park, Jung-Yup Kim, Jungho Lee
Development of Humanoid Robot Platform KHR-2 (KAIST Humanoid Robot - 2)
") Development of Humanoid Robot Platform KHR-2 (KAIST Humanoid Robot - 2) Ill-Woo Park, Jung-Yup Kim, Seo-Wook Park, and Jun-Ho Oh Department of Mechanical Engineering, Korea Advanced Institute of Science
Development of Humanoid Robot Platform KHR-2 (KAIST Humanoid Robot - 2) Ill-Woo Park, Jung-Yup Kim, Seo-Wook Park, and Jun-Ho Oh Department of Mechanical Engineering, Korea Advanced Institute of Science
DEVELOPMENT OF THE HUMANOID ROBOT HUBO-FX-1
 DEVELOPMENT OF THE HUMANOID ROBOT HUBO-FX-1 Jungho Lee, KAIST, Republic of Korea, jungho77@kaist.ac.kr Jung-Yup Kim, KAIST, Republic of Korea, kirk1@mclab3.kaist.ac.kr Ill-Woo Park, KAIST, Republic of
DEVELOPMENT OF THE HUMANOID ROBOT HUBO-FX-1 Jungho Lee, KAIST, Republic of Korea, jungho77@kaist.ac.kr Jung-Yup Kim, KAIST, Republic of Korea, kirk1@mclab3.kaist.ac.kr Ill-Woo Park, KAIST, Republic of
Mechanical Design of the Humanoid Robot Platform, HUBO
 Mechanical Design of the Humanoid Robot Platform, HUBO ILL-WOO PARK, JUNG-YUP KIM, JUNGHO LEE and JUN-HO OH HUBO Laboratory, Humanoid Robot Research Center, Department of Mechanical Engineering, Korea
Mechanical Design of the Humanoid Robot Platform, HUBO ILL-WOO PARK, JUNG-YUP KIM, JUNGHO LEE and JUN-HO OH HUBO Laboratory, Humanoid Robot Research Center, Department of Mechanical Engineering, Korea
Development of a Humanoid Biped Walking Robot Platform KHR-1 - Initial Design and Its Performance Evaluation
 Development of a Humanoid Biped Walking Robot Platform KHR-1 - Initial Design and Its Performance Evaluation Jung-Hoon Kim, Seo-Wook Park, Ill-Woo Park, and Jun-Ho Oh Machine Control Laboratory, Department
Development of a Humanoid Biped Walking Robot Platform KHR-1 - Initial Design and Its Performance Evaluation Jung-Hoon Kim, Seo-Wook Park, Ill-Woo Park, and Jun-Ho Oh Machine Control Laboratory, Department
Korea Humanoid Robot Projects
 Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
Sensor system of a small biped entertainment robot
 Advanced Robotics, Vol. 18, No. 10, pp. 1039 1052 (2004) VSP and Robotics Society of Japan 2004. Also available online - www.vsppub.com Sensor system of a small biped entertainment robot Short paper TATSUZO
Advanced Robotics, Vol. 18, No. 10, pp. 1039 1052 (2004) VSP and Robotics Society of Japan 2004. Also available online - www.vsppub.com Sensor system of a small biped entertainment robot Short paper TATSUZO
Development of Biped Humanoid Robots at the Humanoid Robot Research Center, Korea Advanced Institute of Science and Technology (KAIST)
") Development of Biped Humanoid Robots at the Humanoid Robot Research Center, Korea Advanced Institute of Science and Technology (KAIST) Ill-Woo Park, Jung-Yup Kim, Jungho Lee, Min-Su Kim, Baek-Kyu Cho and
Development of Biped Humanoid Robots at the Humanoid Robot Research Center, Korea Advanced Institute of Science and Technology (KAIST) Ill-Woo Park, Jung-Yup Kim, Jungho Lee, Min-Su Kim, Baek-Kyu Cho and
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists. International authors and editors
 We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 4,100 116,000 120M Open access books available International authors and editors Downloads Our
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 4,100 116,000 120M Open access books available International authors and editors Downloads Our
Humanoid Robot HanSaRam: Recent Development and Compensation for the Landing Impact Force by Time Domain Passivity Approach
 Humanoid Robot HanSaRam: Recent Development and Compensation for the Landing Impact Force by Time Domain Passivity Approach Yong-Duk Kim, Bum-Joo Lee, Seung-Hwan Choi, In-Won Park, and Jong-Hwan Kim Robot
Humanoid Robot HanSaRam: Recent Development and Compensation for the Landing Impact Force by Time Domain Passivity Approach Yong-Duk Kim, Bum-Joo Lee, Seung-Hwan Choi, In-Won Park, and Jong-Hwan Kim Robot
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface
 Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
Design and Control of the BUAA Four-Fingered Hand
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Team Description 2006 for Team RO-PE A
 Team Description 2006 for Team RO-PE A Chew Chee-Meng, Samuel Mui, Lim Tongli, Ma Chongyou, and Estella Ngan National University of Singapore, 119260 Singapore {mpeccm, g0500307, u0204894, u0406389, u0406316}@nus.edu.sg
Team Description 2006 for Team RO-PE A Chew Chee-Meng, Samuel Mui, Lim Tongli, Ma Chongyou, and Estella Ngan National University of Singapore, 119260 Singapore {mpeccm, g0500307, u0204894, u0406389, u0406316}@nus.edu.sg
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball
 Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Experiment on Underwater Docking of an Autonomous Underwater Vehicle 'ISiMI' using Optical Terminal Guidance
 061216-006 1 Experiment on Underwater ing of an Autonomous Underwater Vehicle 'ISiMI' using Optical Terminal Guidance Jin-Yeong Park, Bong-Huan Jun, Pan-Mook Lee, Fill-Youb Lee and Jun-ho Oh Humanoid Robot
061216-006 1 Experiment on Underwater ing of an Autonomous Underwater Vehicle 'ISiMI' using Optical Terminal Guidance Jin-Yeong Park, Bong-Huan Jun, Pan-Mook Lee, Fill-Youb Lee and Jun-ho Oh Humanoid Robot
Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot
 Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot Quy-Hung Vu, Byeong-Sang Kim, Jae-Bok Song Korea University 1 Anam-dong, Seongbuk-gu, Seoul, Korea vuquyhungbk@yahoo.com, lovidia@korea.ac.kr,
Autonomous Stair Climbing Algorithm for a Small Four-Tracked Robot Quy-Hung Vu, Byeong-Sang Kim, Jae-Bok Song Korea University 1 Anam-dong, Seongbuk-gu, Seoul, Korea vuquyhungbk@yahoo.com, lovidia@korea.ac.kr,
KMUTT Kickers: Team Description Paper
 KMUTT Kickers: Team Description Paper Thavida Maneewarn, Xye, Korawit Kawinkhrue, Amnart Butsongka, Nattapong Kaewlek King Mongkut s University of Technology Thonburi, Institute of Field Robotics (FIBO)
KMUTT Kickers: Team Description Paper Thavida Maneewarn, Xye, Korawit Kawinkhrue, Amnart Butsongka, Nattapong Kaewlek King Mongkut s University of Technology Thonburi, Institute of Field Robotics (FIBO)
Robo-Erectus Jr-2013 KidSize Team Description Paper.
 Robo-Erectus Jr-2013 KidSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon and Changjiu Zhou. Advanced Robotics and Intelligent Control Centre, Singapore Polytechnic, 500 Dover Road, 139651,
Robo-Erectus Jr-2013 KidSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon and Changjiu Zhou. Advanced Robotics and Intelligent Control Centre, Singapore Polytechnic, 500 Dover Road, 139651,
Converting Motion between Different Types of Humanoid Robots Using Genetic Algorithms
 Converting Motion between Different Types of Humanoid Robots Using Genetic Algorithms Mari Nishiyama and Hitoshi Iba Abstract The imitation between different types of robots remains an unsolved task for
Converting Motion between Different Types of Humanoid Robots Using Genetic Algorithms Mari Nishiyama and Hitoshi Iba Abstract The imitation between different types of robots remains an unsolved task for
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014
 ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014 Yu DongDong, Xiang Chuan, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2014 Yu DongDong, Xiang Chuan, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
Shuffle Traveling of Humanoid Robots
 Shuffle Traveling of Humanoid Robots Masanao Koeda, Masayuki Ueno, and Takayuki Serizawa Abstract Recently, many researchers have been studying methods for the stepless slip motion of humanoid robots.
Shuffle Traveling of Humanoid Robots Masanao Koeda, Masayuki Ueno, and Takayuki Serizawa Abstract Recently, many researchers have been studying methods for the stepless slip motion of humanoid robots.
UKEMI: Falling Motion Control to Minimize Damage to Biped Humanoid Robot
 Proceedings of the 2002 IEEE/RSJ Intl. Conference on Intelligent Robots and Systems EPFL, Lausanne, Switzerland October 2002 UKEMI: Falling Motion Control to Minimize Damage to Biped Humanoid Robot Kiyoshi
Proceedings of the 2002 IEEE/RSJ Intl. Conference on Intelligent Robots and Systems EPFL, Lausanne, Switzerland October 2002 UKEMI: Falling Motion Control to Minimize Damage to Biped Humanoid Robot Kiyoshi
Design and Implementation of a Simplified Humanoid Robot with 8 DOF
 Design and Implementation of a Simplified Humanoid Robot with 8 DOF Hari Krishnan R & Vallikannu A. L Department of Electronics and Communication Engineering, Hindustan Institute of Technology and Science,
Design and Implementation of a Simplified Humanoid Robot with 8 DOF Hari Krishnan R & Vallikannu A. L Department of Electronics and Communication Engineering, Hindustan Institute of Technology and Science,
Robo-Erectus Tr-2010 TeenSize Team Description Paper.
 Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015
 ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
ZJUDancer Team Description Paper Humanoid Kid-Size League of Robocup 2015 Yu DongDong, Liu Yun, Zhou Chunlin, and Xiong Rong State Key Lab. of Industrial Control Technology, Zhejiang University, Hangzhou,
Space Research expeditions and open space work. Education & Research Teaching and laboratory facilities. Medical Assistance for people
 Space Research expeditions and open space work Education & Research Teaching and laboratory facilities. Medical Assistance for people Safety Life saving activity, guarding Military Use to execute missions
Space Research expeditions and open space work Education & Research Teaching and laboratory facilities. Medical Assistance for people Safety Life saving activity, guarding Military Use to execute missions
Vision based behavior verification system of humanoid robot for daily environment tasks
 Vision based behavior verification system of humanoid robot for daily environment tasks Kei Okada, Mitsuharu Kojima, Yuichi Sagawa, Toshiyuki Ichino, Kenji Sato and Masayuki Inaba Graduate School of Information
Vision based behavior verification system of humanoid robot for daily environment tasks Kei Okada, Mitsuharu Kojima, Yuichi Sagawa, Toshiyuki Ichino, Kenji Sato and Masayuki Inaba Graduate School of Information
Limits of a Distributed Intelligent Networked Device in the Intelligence Space. 1 Brief History of the Intelligent Space
 Limits of a Distributed Intelligent Networked Device in the Intelligence Space Gyula Max, Peter Szemes Budapest University of Technology and Economics, H-1521, Budapest, Po. Box. 91. HUNGARY, Tel: +36
Limits of a Distributed Intelligent Networked Device in the Intelligence Space Gyula Max, Peter Szemes Budapest University of Technology and Economics, H-1521, Budapest, Po. Box. 91. HUNGARY, Tel: +36
Footstep Planning for the Honda ASIMO Humanoid
 Footstep Planning for the Honda ASIMO Humanoid Joel Chestnutt, Manfred Lau, German Cheung, James Kuffner, Jessica Hodgins, and Takeo Kanade The Robotics Institute Carnegie Mellon University 5000 Forbes
Footstep Planning for the Honda ASIMO Humanoid Joel Chestnutt, Manfred Lau, German Cheung, James Kuffner, Jessica Hodgins, and Takeo Kanade The Robotics Institute Carnegie Mellon University 5000 Forbes
Pr Yl. Rl Pl. 200mm mm. 400mm. 70mm. 120mm
 Humanoid Robot Mechanisms for Responsive Mobility M.OKADA 1, T.SHINOHARA 1, T.GOTOH 1, S.BAN 1 and Y.NAKAMURA 12 1 Dept. of Mechano-Informatics, Univ. of Tokyo., 7-3-1 Hongo Bunkyo-ku Tokyo, 113-8656 Japan
Humanoid Robot Mechanisms for Responsive Mobility M.OKADA 1, T.SHINOHARA 1, T.GOTOH 1, S.BAN 1 and Y.NAKAMURA 12 1 Dept. of Mechano-Informatics, Univ. of Tokyo., 7-3-1 Hongo Bunkyo-ku Tokyo, 113-8656 Japan
Kid-Size Humanoid Soccer Robot Design by TKU Team
 Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
Team KMUTT: Team Description Paper
 Team KMUTT: Team Description Paper Thavida Maneewarn, Xye, Pasan Kulvanit, Sathit Wanitchaikit, Panuvat Sinsaranon, Kawroong Saktaweekulkit, Nattapong Kaewlek Djitt Laowattana King Mongkut s University
Team KMUTT: Team Description Paper Thavida Maneewarn, Xye, Pasan Kulvanit, Sathit Wanitchaikit, Panuvat Sinsaranon, Kawroong Saktaweekulkit, Nattapong Kaewlek Djitt Laowattana King Mongkut s University
RoboCup TDP Team ZSTT
 RoboCup 2018 - TDP Team ZSTT Jaesik Jeong 1, Jeehyun Yang 1, Yougsup Oh 2, Hyunah Kim 2, Amirali Setaieshi 3, Sourosh Sedeghnejad 3, and Jacky Baltes 1 1 Educational Robotics Centre, National Taiwan Noremal
RoboCup 2018 - TDP Team ZSTT Jaesik Jeong 1, Jeehyun Yang 1, Yougsup Oh 2, Hyunah Kim 2, Amirali Setaieshi 3, Sourosh Sedeghnejad 3, and Jacky Baltes 1 1 Educational Robotics Centre, National Taiwan Noremal
EROS TEAM. Team Description for Humanoid Kidsize League of Robocup2013
 EROS TEAM Team Description for Humanoid Kidsize League of Robocup2013 Azhar Aulia S., Ardiansyah Al-Faruq, Amirul Huda A., Edwin Aditya H., Dimas Pristofani, Hans Bastian, A. Subhan Khalilullah, Dadet
EROS TEAM Team Description for Humanoid Kidsize League of Robocup2013 Azhar Aulia S., Ardiansyah Al-Faruq, Amirul Huda A., Edwin Aditya H., Dimas Pristofani, Hans Bastian, A. Subhan Khalilullah, Dadet
CONTROL SYSTEM TO BALANCE A BIPED ROBOT BY THE SENSING OF COG TRAJECTORIES
 CONTROL SYSTEM TO BALANCE A BIPED ROBOT BY THE SENSING OF COG TRAJECTORIES Claros,Mario Jorge; Rodríguez-Ortiz, José de Jesús; Soto Rogelio Sevilla #109 Col. Altavista, Monterrey N. L. CP 64840 jorge.claros@itesm.mx,
CONTROL SYSTEM TO BALANCE A BIPED ROBOT BY THE SENSING OF COG TRAJECTORIES Claros,Mario Jorge; Rodríguez-Ortiz, José de Jesús; Soto Rogelio Sevilla #109 Col. Altavista, Monterrey N. L. CP 64840 jorge.claros@itesm.mx,
Team Description for Humanoid KidSize League of RoboCup Stephen McGill, Seung Joon Yi, Yida Zhang, Aditya Sreekumar, and Professor Dan Lee
 Team DARwIn Team Description for Humanoid KidSize League of RoboCup 2013 Stephen McGill, Seung Joon Yi, Yida Zhang, Aditya Sreekumar, and Professor Dan Lee GRASP Lab School of Engineering and Applied Science,
Team DARwIn Team Description for Humanoid KidSize League of RoboCup 2013 Stephen McGill, Seung Joon Yi, Yida Zhang, Aditya Sreekumar, and Professor Dan Lee GRASP Lab School of Engineering and Applied Science,
Design and Experiments of Advanced Leg Module (HRP-2L) for Humanoid Robot (HRP-2) Development
 for Humanoid Robot (HRP-2) Development") Proceedings of the 2002 IEEE/RSJ Intl. Conference on Intelligent Robots and Systems EPFL, Lausanne, Switzerland October 2002 Design and Experiments of Advanced Leg Module (HRP-2L) for Humanoid Robot (HRP-2)
Proceedings of the 2002 IEEE/RSJ Intl. Conference on Intelligent Robots and Systems EPFL, Lausanne, Switzerland October 2002 Design and Experiments of Advanced Leg Module (HRP-2L) for Humanoid Robot (HRP-2)
The Origin of Artificial Species: Humanoid Robot HanSaRam
 The Origin of Artificial Species: Humanoid Robot HanSaRam Jong-Hwan Kim, Kang-Hee Lee, Yong-Duk Kim, Bum-Joo Lee and Jeong-Ki Yoo Robot Intelligence Technology Laboratory, EECS Department, KAIST, Guseong-dong,
The Origin of Artificial Species: Humanoid Robot HanSaRam Jong-Hwan Kim, Kang-Hee Lee, Yong-Duk Kim, Bum-Joo Lee and Jeong-Ki Yoo Robot Intelligence Technology Laboratory, EECS Department, KAIST, Guseong-dong,
System Overview of The Humanoid Robot Blackmann
 stem Overview of The Humanoid Robot Blackmann JIAN WANG, TAO SHENG, JIANWEN WANG and HONGXU MA College of Mechtronic and Automation National University of Defense Technology Changsha, Hunan Province THE
stem Overview of The Humanoid Robot Blackmann JIAN WANG, TAO SHENG, JIANWEN WANG and HONGXU MA College of Mechtronic and Automation National University of Defense Technology Changsha, Hunan Province THE
Advanced Digital Motion Control Using SERCOS-based Torque Drives
 Advanced Digital Motion Using SERCOS-based Torque Drives Ying-Yu Tzou, Andes Yang, Cheng-Chang Hsieh, and Po-Ching Chen Power Electronics & Motion Lab. Dept. of Electrical and Engineering National Chiao
Advanced Digital Motion Using SERCOS-based Torque Drives Ying-Yu Tzou, Andes Yang, Cheng-Chang Hsieh, and Po-Ching Chen Power Electronics & Motion Lab. Dept. of Electrical and Engineering National Chiao
Masatoshi Ishikawa, Akio Namiki, Takashi Komuro, and Idaku Ishii
 1ms Sensory-Motor Fusion System with Hierarchical Parallel Processing Architecture Masatoshi Ishikawa, Akio Namiki, Takashi Komuro, and Idaku Ishii Department of Mathematical Engineering and Information
1ms Sensory-Motor Fusion System with Hierarchical Parallel Processing Architecture Masatoshi Ishikawa, Akio Namiki, Takashi Komuro, and Idaku Ishii Department of Mathematical Engineering and Information
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League
 Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League Chung-Hsien Kuo 1, Hung-Chyun Chou 1, Jui-Chou Chung 1, Po-Chung Chia 2, Shou-Wei Chi 1, Yu-De Lien 1 1 Department
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2010 Humanoid League Chung-Hsien Kuo 1, Hung-Chyun Chou 1, Jui-Chou Chung 1, Po-Chung Chia 2, Shou-Wei Chi 1, Yu-De Lien 1 1 Department
Integration of Manipulation and Locomotion by a Humanoid Robot
 Integration of Manipulation and Locomotion by a Humanoid Robot Kensuke Harada, Shuuji Kajita, Hajime Saito, Fumio Kanehiro, and Hirohisa Hirukawa Humanoid Research Group, Intelligent Systems Institute
Integration of Manipulation and Locomotion by a Humanoid Robot Kensuke Harada, Shuuji Kajita, Hajime Saito, Fumio Kanehiro, and Hirohisa Hirukawa Humanoid Research Group, Intelligent Systems Institute
Birth of An Intelligent Humanoid Robot in Singapore
 Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Double-track mobile robot for hazardous environment applications
 Advanced Robotics, Vol. 17, No. 5, pp. 447 459 (2003) Ó VSP and Robotics Society of Japan 2003. Also available online - www.vsppub.com Short paper Double-track mobile robot for hazardous environment applications
Advanced Robotics, Vol. 17, No. 5, pp. 447 459 (2003) Ó VSP and Robotics Society of Japan 2003. Also available online - www.vsppub.com Short paper Double-track mobile robot for hazardous environment applications
Robot Joint Angle Control Based on Self Resonance Cancellation Using Double Encoders
 Robot Joint Angle Control Based on Self Resonance Cancellation Using Double Encoders Akiyuki Hasegawa, Hiroshi Fujimoto and Taro Takahashi 2 Abstract Research on the control using a load-side encoder for
Robot Joint Angle Control Based on Self Resonance Cancellation Using Double Encoders Akiyuki Hasegawa, Hiroshi Fujimoto and Taro Takahashi 2 Abstract Research on the control using a load-side encoder for
Development of Multi-fingered Hand for Life-size Humanoid Robots
 2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 WeC7.2 Development of Multi-fingered Hand for Life-size Humanoid Robots Kenji KANEKO, Kensuke HARADA, and Fumio
2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 WeC7.2 Development of Multi-fingered Hand for Life-size Humanoid Robots Kenji KANEKO, Kensuke HARADA, and Fumio
YRA Team Description 2011
 YRA Team Description 2011 Mohammad HosseinKargar, MeisamBakhshi, Ali Esmaeilpour, Mohammad Amini, Mohammad Dashti Rahmat Abadi, Abolfazl Golaftab, Ghazanfar Zahedi, Mohammadreza Jenabzadeh Yazd Robotic
YRA Team Description 2011 Mohammad HosseinKargar, MeisamBakhshi, Ali Esmaeilpour, Mohammad Amini, Mohammad Dashti Rahmat Abadi, Abolfazl Golaftab, Ghazanfar Zahedi, Mohammadreza Jenabzadeh Yazd Robotic
Nobutsuna Endo 1, Shimpei Momoki 1, Massimiliano Zecca 2,3, Minoru Saito 1, Yu Mizoguchi 1, Kazuko Itoh 3,5, and Atsuo Takanishi 2,4,5
 2008 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 2008 Development of Whole-body Emotion Expression Humanoid Robot Nobutsuna Endo 1, Shimpei Momoki 1, Massimiliano
2008 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 2008 Development of Whole-body Emotion Expression Humanoid Robot Nobutsuna Endo 1, Shimpei Momoki 1, Massimiliano
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Graphical Simulation and High-Level Control of Humanoid Robots
 In Proc. 2000 IEEE RSJ Int l Conf. on Intelligent Robots and Systems (IROS 2000) Graphical Simulation and High-Level Control of Humanoid Robots James J. Kuffner, Jr. Satoshi Kagami Masayuki Inaba Hirochika
In Proc. 2000 IEEE RSJ Int l Conf. on Intelligent Robots and Systems (IROS 2000) Graphical Simulation and High-Level Control of Humanoid Robots James J. Kuffner, Jr. Satoshi Kagami Masayuki Inaba Hirochika
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League
 Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League Chung-Hsien Kuo, Yu-Cheng Kuo, Yu-Ping Shen, Chen-Yun Kuo, Yi-Tseng Lin 1 Department of Electrical Egineering, National
Team Description Paper: HuroEvolution Humanoid Robot for Robocup 2014 Humanoid League Chung-Hsien Kuo, Yu-Cheng Kuo, Yu-Ping Shen, Chen-Yun Kuo, Yi-Tseng Lin 1 Department of Electrical Egineering, National
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Hanuman KMUTT: Team Description Paper
 Hanuman KMUTT: Team Description Paper Wisanu Jutharee, Sathit Wanitchaikit, Boonlert Maneechai, Natthapong Kaewlek, Thanniti Khunnithiwarawat, Pongsakorn Polchankajorn, Nakarin Suppakun, Narongsak Tirasuntarakul,
Hanuman KMUTT: Team Description Paper Wisanu Jutharee, Sathit Wanitchaikit, Boonlert Maneechai, Natthapong Kaewlek, Thanniti Khunnithiwarawat, Pongsakorn Polchankajorn, Nakarin Suppakun, Narongsak Tirasuntarakul,
BLuAC5 Brushless Universal Servo Amplifier
 BLuAC5 Brushless Universal Servo Amplifier Description The BLu Series servo drives provide compact, reliable solutions for a wide range of motion applications in a variety of industries. BLu Series drives
BLuAC5 Brushless Universal Servo Amplifier Description The BLu Series servo drives provide compact, reliable solutions for a wide range of motion applications in a variety of industries. BLu Series drives
Development and Evaluation of a Centaur Robot
 Development and Evaluation of a Centaur Robot 1 Satoshi Tsuda, 1 Kuniya Shinozaki, and 2 Ryohei Nakatsu 1 Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan {amy65823,
Development and Evaluation of a Centaur Robot 1 Satoshi Tsuda, 1 Kuniya Shinozaki, and 2 Ryohei Nakatsu 1 Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan {amy65823,
Performance Assessment of a 3 DOF Differential Based. Waist joint for the icub Baby Humanoid Robot
 Performance Assessment of a 3 DOF Differential Based Waist joint for the icub Baby Humanoid Robot W. M. Hinojosa, N. G. Tsagarakis, Giorgio Metta, Francesco Becchi, Julio Sandini and Darwin. G. Caldwell
Performance Assessment of a 3 DOF Differential Based Waist joint for the icub Baby Humanoid Robot W. M. Hinojosa, N. G. Tsagarakis, Giorgio Metta, Francesco Becchi, Julio Sandini and Darwin. G. Caldwell
The Tele-operation of the Humanoid Robot -Whole Body Operation for Humanoid Robots in Contact with Environment-
 The Tele-operation of the Humanoid Robot -Whole Body Operation for Humanoid Robots in Contact with Environment- Hitoshi Hasunuma, Kensuke Harada, and Hirohisa Hirukawa System Technology Development Center,
The Tele-operation of the Humanoid Robot -Whole Body Operation for Humanoid Robots in Contact with Environment- Hitoshi Hasunuma, Kensuke Harada, and Hirohisa Hirukawa System Technology Development Center,
Advanced Distributed Architecture for a Small Biped Robot Control M. Albero, F. Blanes, G. Benet, J.E. Simó, J. Coronel
 Advanced Distributed Architecture for a Small Biped Robot Control M. Albero, F. Blanes, G. Benet, J.E. Simó, J. Coronel Departamento de Informática de Sistemas y Computadores. (DISCA) Universidad Politécnica
Advanced Distributed Architecture for a Small Biped Robot Control M. Albero, F. Blanes, G. Benet, J.E. Simó, J. Coronel Departamento de Informática de Sistemas y Computadores. (DISCA) Universidad Politécnica
ZJUDancer Team Description Paper
 ZJUDancer Team Description Paper Tang Qing, Xiong Rong, Li Shen, Zhan Jianbo, and Feng Hao State Key Lab. of Industrial Technology, Zhejiang University, Hangzhou, China Abstract. This document describes
ZJUDancer Team Description Paper Tang Qing, Xiong Rong, Li Shen, Zhan Jianbo, and Feng Hao State Key Lab. of Industrial Technology, Zhejiang University, Hangzhou, China Abstract. This document describes
Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization
 Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
BLuAC5 Brushless Universal Servo Amplifier
 BLuAC5 Brushless Universal Servo Amplifier Description The BLu Series servo drives provide compact, reliable solutions for a wide range of motion applications in a variety of industries. BLu Series drives
BLuAC5 Brushless Universal Servo Amplifier Description The BLu Series servo drives provide compact, reliable solutions for a wide range of motion applications in a variety of industries. BLu Series drives
The Future of AI A Robotics Perspective
 The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
A Semi-Minimalistic Approach to Humanoid Design
 International Journal of Scientific and Research Publications, Volume 2, Issue 4, April 2012 1 A Semi-Minimalistic Approach to Humanoid Design Hari Krishnan R., Vallikannu A.L. Department of Electronics
International Journal of Scientific and Research Publications, Volume 2, Issue 4, April 2012 1 A Semi-Minimalistic Approach to Humanoid Design Hari Krishnan R., Vallikannu A.L. Department of Electronics
Rapid Control Prototyping for Robot Soccer
 Proceedings of the 17th World Congress The International Federation of Automatic Control Rapid Control Prototyping for Robot Soccer Junwon Jang Soohee Han Hanjun Kim Choon Ki Ahn School of Electrical Engr.
Proceedings of the 17th World Congress The International Federation of Automatic Control Rapid Control Prototyping for Robot Soccer Junwon Jang Soohee Han Hanjun Kim Choon Ki Ahn School of Electrical Engr.
NimbRo 2005 Team Description
 In: RoboCup 2005 Humanoid League Team Descriptions, Osaka, July 2005. NimbRo 2005 Team Description Sven Behnke, Maren Bennewitz, Jürgen Müller, and Michael Schreiber Albert-Ludwigs-University of Freiburg,
In: RoboCup 2005 Humanoid League Team Descriptions, Osaka, July 2005. NimbRo 2005 Team Description Sven Behnke, Maren Bennewitz, Jürgen Müller, and Michael Schreiber Albert-Ludwigs-University of Freiburg,
Combot: Compliant Climbing Robotic Platform with Transitioning Capability and Payload Capacity
 2012 IEEE International Conference on Robotics and Automation RiverCentre, Saint Paul, Minnesota, USA May 14-18, 2012 Combot: Compliant Climbing Robotic Platform with Transitioning Capability and Payload
2012 IEEE International Conference on Robotics and Automation RiverCentre, Saint Paul, Minnesota, USA May 14-18, 2012 Combot: Compliant Climbing Robotic Platform with Transitioning Capability and Payload
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Development of Drum CVT for a Wire-Driven Robot Hand
 The 009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 009 St. Louis, USA Development of Drum CVT for a Wire-Driven Robot Hand Kojiro Matsushita, Shinpei Shikanai, and
The 009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 009 St. Louis, USA Development of Drum CVT for a Wire-Driven Robot Hand Kojiro Matsushita, Shinpei Shikanai, and
An In-pipe Robot with Multi-axial Differential Gear Mechanism
 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan An In-pipe Robot with Multi-axial Differential Gear Mechanism Ho Moon Kim, Jung Seok Suh,
2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan An In-pipe Robot with Multi-axial Differential Gear Mechanism Ho Moon Kim, Jung Seok Suh,
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Baset Adult-Size 2016 Team Description Paper
 Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
Baset Adult-Size 2016 Team Description Paper Mojtaba Hosseini, Vahid Mohammadi, Farhad Jafari 2, Dr. Esfandiar Bamdad 1 1 Humanoid Robotic Laboratory, Robotic Center, Baset Pazhuh Tehran company. No383,
Development of a Walking Support Robot with Velocity-based Mechanical Safety Devices*
 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan Development of a Walking Support Robot with Velocity-based Mechanical Safety Devices* Yoshihiro
2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan Development of a Walking Support Robot with Velocity-based Mechanical Safety Devices* Yoshihiro
DETC EARLY DEVELOPMENTS OF A PARALLELLY ACTUATED HUMANOID, SAFFIR
 Proceedings of the ASME 2013 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference IDETC/CIE 2013 August 4-7, 2013, Portland, Oregon, USA DETC2013-12590
Proceedings of the ASME 2013 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference IDETC/CIE 2013 August 4-7, 2013, Portland, Oregon, USA DETC2013-12590
An Adaptive Action Model for Legged Navigation Planning
 An Adaptive Action Model for Legged Navigation Planning Joel Chestnutt Koichi Nishiwaki James Kuffner Satoshi Kagami Robotics Institute Digital Human Research Center Carnegie Mellon University AIST Waterfront
An Adaptive Action Model for Legged Navigation Planning Joel Chestnutt Koichi Nishiwaki James Kuffner Satoshi Kagami Robotics Institute Digital Human Research Center Carnegie Mellon University AIST Waterfront
AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1
 AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1 Jorge Paiva Luís Tavares João Silva Sequeira Institute for Systems and Robotics Institute for Systems and Robotics Instituto Superior Técnico,
AN HYBRID LOCOMOTION SERVICE ROBOT FOR INDOOR SCENARIOS 1 Jorge Paiva Luís Tavares João Silva Sequeira Institute for Systems and Robotics Institute for Systems and Robotics Instituto Superior Técnico,
Concept and Architecture of a Centaur Robot
 Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
CIT Brains (Kid Size League)
") CIT Brains (Kid Size League) Yasuo Hayashibara 1, Hideaki Minakata 1, Kiyoshi Irie 1, Taiki Fukuda 1, Victor Tee Sin Loong 1, Daiki Maekawa 1, Yusuke Ito 1, Takamasa Akiyama 1, Taiitiro Mashiko 1, Kohei
CIT Brains (Kid Size League) Yasuo Hayashibara 1, Hideaki Minakata 1, Kiyoshi Irie 1, Taiki Fukuda 1, Victor Tee Sin Loong 1, Daiki Maekawa 1, Yusuke Ito 1, Takamasa Akiyama 1, Taiitiro Mashiko 1, Kohei
Pushing Manipulation by Humanoid considering Two-Kinds of ZMPs
 Proceedings of the 2003 IEEE International Conference on Robotics & Automation Taipei, Taiwan, September 14-19, 2003 Pushing Manipulation by Humanoid considering Two-Kinds of ZMPs Kensuke Harada, Shuuji
Proceedings of the 2003 IEEE International Conference on Robotics & Automation Taipei, Taiwan, September 14-19, 2003 Pushing Manipulation by Humanoid considering Two-Kinds of ZMPs Kensuke Harada, Shuuji
Randomized Motion Planning for Groups of Nonholonomic Robots
 Randomized Motion Planning for Groups of Nonholonomic Robots Christopher M Clark chrisc@sun-valleystanfordedu Stephen Rock rock@sun-valleystanfordedu Department of Aeronautics & Astronautics Stanford University
Randomized Motion Planning for Groups of Nonholonomic Robots Christopher M Clark chrisc@sun-valleystanfordedu Stephen Rock rock@sun-valleystanfordedu Department of Aeronautics & Astronautics Stanford University
Development of the Lower Limbs for a Humanoid Robot
 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems October 7-12, 2012. Vilamoura, Algarve, Portugal Development of the Lower Limbs for a Humanoid Robot Joohyung Kim, Younbaek Lee,
2012 IEEE/RSJ International Conference on Intelligent Robots and Systems October 7-12, 2012. Vilamoura, Algarve, Portugal Development of the Lower Limbs for a Humanoid Robot Joohyung Kim, Younbaek Lee,
UNIT VI. Current approaches to programming are classified as into two major categories:
 Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
ServoStep technology
 What means "ServoStep" "ServoStep" in Ever Elettronica's strategy resumes seven keypoints for quality and performances in motion control applications: Stepping motors Fast Forward Feed Full Digital Drive
What means "ServoStep" "ServoStep" in Ever Elettronica's strategy resumes seven keypoints for quality and performances in motion control applications: Stepping motors Fast Forward Feed Full Digital Drive
Concept and Architecture of a Centaur Robot
 Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
Concept and Architecture of a Centaur Robot Satoshi Tsuda, Yohsuke Oda, Kuniya Shinozaki, and Ryohei Nakatsu Kwansei Gakuin University, School of Science and Technology 2-1 Gakuen, Sanda, 669-1337 Japan
Realization of Humanoid Robot Playing Golf
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 16, No 6 Special issue with selection of extended papers from 6th International Conference on Logistic, Informatics and Service
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 16, No 6 Special issue with selection of extended papers from 6th International Conference on Logistic, Informatics and Service
KUDOS Team Description Paper for Humanoid Kidsize League of RoboCup 2016
 KUDOS Team Description Paper for Humanoid Kidsize League of RoboCup 2016 Hojin Jeon, Donghyun Ahn, Yeunhee Kim, Yunho Han, Jeongmin Park, Soyeon Oh, Seri Lee, Junghun Lee, Namkyun Kim, Donghee Han, ChaeEun
KUDOS Team Description Paper for Humanoid Kidsize League of RoboCup 2016 Hojin Jeon, Donghyun Ahn, Yeunhee Kim, Yunho Han, Jeongmin Park, Soyeon Oh, Seri Lee, Junghun Lee, Namkyun Kim, Donghee Han, ChaeEun
Running Pattern Generation for a Humanoid Robot
 Running Pattern Generation for a Humanoid Robot Shuuji Kajita (IST, Takashi Nagasaki (U. of Tsukuba, Kazuhito Yokoi, Kenji Kaneko and Kazuo Tanie (IST 1-1-1 Umezono, Tsukuba Central 2, IST, Tsukuba Ibaraki
Running Pattern Generation for a Humanoid Robot Shuuji Kajita (IST, Takashi Nagasaki (U. of Tsukuba, Kazuhito Yokoi, Kenji Kaneko and Kazuo Tanie (IST 1-1-1 Umezono, Tsukuba Central 2, IST, Tsukuba Ibaraki
Mechatronics of the Humanoid Robot ROMAN
 Mechatronics of the Humanoid Robot ROMAN Krzysztof Mianowski 1 and Norbert Schmitz and Karsten Berns 2 1 Institute of Aeronautics and Applied Mechanics, Faculty of Power and Aeronautical Engineering, Warsaw
Mechatronics of the Humanoid Robot ROMAN Krzysztof Mianowski 1 and Norbert Schmitz and Karsten Berns 2 1 Institute of Aeronautics and Applied Mechanics, Faculty of Power and Aeronautical Engineering, Warsaw
University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT
 University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT Brandon J. Patton Instructors: Drs. Antonio Arroyo and Eric Schwartz
University of Florida Department of Electrical and Computer Engineering Intelligent Machine Design Laboratory EEL 4665 Spring 2013 LOSAT Brandon J. Patton Instructors: Drs. Antonio Arroyo and Eric Schwartz
Estimation of Absolute Positioning of mobile robot using U-SAT
 Estimation of Absolute Positioning of mobile robot using U-SAT Su Yong Kim 1, SooHong Park 2 1 Graduate student, Department of Mechanical Engineering, Pusan National University, KumJung Ku, Pusan 609-735,
Estimation of Absolute Positioning of mobile robot using U-SAT Su Yong Kim 1, SooHong Park 2 1 Graduate student, Department of Mechanical Engineering, Pusan National University, KumJung Ku, Pusan 609-735,
EF-45 Iris Recognition System
 EF-45 Iris Recognition System Innovative face positioning feedback provides outstanding subject ease-of-use at an extended capture range of 35 to 45 cm Product Description The EF-45 is advanced next generation
EF-45 Iris Recognition System Innovative face positioning feedback provides outstanding subject ease-of-use at an extended capture range of 35 to 45 cm Product Description The EF-45 is advanced next generation
The Real-Time Control System for Servomechanisms
 The Real-Time Control System for Servomechanisms PETR STODOLA, JAN MAZAL, IVANA MOKRÁ, MILAN PODHOREC Department of Military Management and Tactics University of Defence Kounicova str. 65, Brno CZECH REPUBLIC
The Real-Time Control System for Servomechanisms PETR STODOLA, JAN MAZAL, IVANA MOKRÁ, MILAN PODHOREC Department of Military Management and Tactics University of Defence Kounicova str. 65, Brno CZECH REPUBLIC
RoboPatriots: George Mason University 2010 RoboCup Team
 RoboPatriots: George Mason University 2010 RoboCup Team Keith Sullivan, Christopher Vo, Sean Luke, and Jyh-Ming Lien Department of Computer Science, George Mason University 4400 University Drive MSN 4A5,
RoboPatriots: George Mason University 2010 RoboCup Team Keith Sullivan, Christopher Vo, Sean Luke, and Jyh-Ming Lien Department of Computer Science, George Mason University 4400 University Drive MSN 4A5,
Design of intelligent vehicle control system based on machine visual
 Advances in Engineering Research (AER), volume 117 2nd Annual International Conference on Electronics, Electrical Engineering and Information Science (EEEIS 2016) Design of intelligent vehicle control
Advances in Engineering Research (AER), volume 117 2nd Annual International Conference on Electronics, Electrical Engineering and Information Science (EEEIS 2016) Design of intelligent vehicle control
Group Robots Forming a Mechanical Structure - Development of slide motion mechanism and estimation of energy consumption of the structural formation -
 Proceedings 2003 IEEE International Symposium on Computational Intelligence in Robotics and Automation July 16-20, 2003, Kobe, Japan Group Robots Forming a Mechanical Structure - Development of slide motion
Proceedings 2003 IEEE International Symposium on Computational Intelligence in Robotics and Automation July 16-20, 2003, Kobe, Japan Group Robots Forming a Mechanical Structure - Development of slide motion
ME375 Lab Project. Bradley Boane & Jeremy Bourque April 25, 2018
 ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
Intuitive Vision Robot Kit For Efficient Education
 Intuitive Vision Robot Kit For Efficient Education OH SangHun a, CHO SungKu b, YU BaekWoon c, Ji Hyun Park d Yonsei University a & Kwangwoon University b Sanghun_oh@yonsei.ac.kr, pot1213@naver.com, bwrew2@gmail.com,
Intuitive Vision Robot Kit For Efficient Education OH SangHun a, CHO SungKu b, YU BaekWoon c, Ji Hyun Park d Yonsei University a & Kwangwoon University b Sanghun_oh@yonsei.ac.kr, pot1213@naver.com, bwrew2@gmail.com,
Logosol AC/DC Intelligent Servo Drive for Coordinated Control LS-174WP
 Features Motors supported: - Panasonic A and S series - Brushless 60/120 commutated - Brush-commutated (DC) motors Up to 20A peak, 12A continuous output current 12 to 90VDC power supply Separate motor
Features Motors supported: - Panasonic A and S series - Brushless 60/120 commutated - Brush-commutated (DC) motors Up to 20A peak, 12A continuous output current 12 to 90VDC power supply Separate motor
Laboratory of Advanced Simulations
 XXIX. ASR '2004 Seminar, Instruments and Control, Ostrava, April 30, 2004 333 Laboratory of Advanced Simulations WAGNEROVÁ, Renata Ing., Ph.D., Katedra ATŘ-352, VŠB-TU Ostrava, 17. listopadu, Ostrava -
XXIX. ASR '2004 Seminar, Instruments and Control, Ostrava, April 30, 2004 333 Laboratory of Advanced Simulations WAGNEROVÁ, Renata Ing., Ph.D., Katedra ATŘ-352, VŠB-TU Ostrava, 17. listopadu, Ostrava -