Indoor Follow Me Drone
|
|
|
- Darrell Henry
- 5 years ago
- Views:
Transcription
1 Indoor Follow Me Drone Wenguang Mao, Zaiwei Zhang, Lili Qiu, Jian He, Yuchen Cui, Sangki Yun Presented By Stephen Xia for Columbia University ELEN 9705 Spring 2018 Instructor: Prof. Xiaofan (Fred) Jiang January 24, 2018 Proceedings of the 15 th Annual Internation Conference on Mobile Systems, Applications, and Services MobiSys 2017, Niagara Falls, NY, USA June 19 th 23 rd, 2017






2 Motivation Follow Me Drones Problem: There is no robust and efficient mobile solution for indoor follow me
3 Components of Follow Me User Tracking Control Drone Control User movement Prediction
4 Components of Follow Me User Tracking Control Drone Control User movement Prediction
5 Current Methods for User Tracking
6 GPS Current Methods for User Tracking
7 Current Methods for User Tracking GPS Computer Vision

8 Current Methods for User Tracking GPS Computer Vision RF

9 Prior Works for User Tracking GPS Computer Vision RF Acoustics
10 Limitations in Indoor Scenarios
11 Limitations in Indoor Scenarios GPS Availability
12 Limitations in Indoor Scenarios GPS Computer Vision Availability Computation and Accuracy
13 Limitations in Indoor Scenarios GPS Computer Vision RF Availability Computation and Accuracy Hardware
14 Limitations in Indoor Scenarios GPS Computer Vision RF Acoustics Availability Computation and Accuracy Hardware
15 Acoustic Tracking Distance Orientation and Angle
16 Acoustic Tracking Prior Art Phase Shift Methods (e.g. Doppler Shift) Angle of Arrival and Time Difference of Arrival (e.g. Cross Correlation) *
17 Acoustic Tracking Prior Art Frequency Modulated Carrier Wave (FMCW) (e.g. Doppler Shift) MUltiple Signal Classification (MUSIC) *


18 Acoustic Tracking Prior Art Frequency Modulated Carrier Wave MUltiple Signal Classification (MUSIC)
19 Acoustic Tracking Distance Orientation and Angle
20 Acoustic Tracking Distance Orientation and Angle
21 Frequency Modulated Carrier Wave
22 Improving Robustness of FMCW - MUSIC
23 Improving Robustness of FMCW - Other Filtering the MUSIC spectrum
24 Improving Robustness of FMCW - Other Frequency Compensation and Signal Chopping Kalman Filter
25 Rabbit
26 Acoustic Tracking Distance Orientation and Angle
27 Acoustic Tracking Angle
28 Components of Follow Me User Tracking Control Drone Control User movement Prediction
29 Components of Follow Me User Tracking Control Drone Control User movement Prediction
30 Prior Work on Control
31 Prior Work on Control Manipulated Variables: Pitch Yaw Roll Controlled Variables: Distance to user Orientation to user Lateral Velocity

32 Prior Work on Control Controller Types: Model Predictive Control PID Vector Field Control Many more.
33 System Control Sensing: Rabbit Robust Acoustic-Based Indoor Tracking
34 System Control Manipulated Variables: Pitch Yaw Roll Controlled Variables: Distance to user Orientation to user Lateral Velocity
35 Components of Follow Me User Tracking Control Drone Control User movement Prediction
36 User Movement Prediction Controller: Model Predictive Control Sensing Lateral Velocity Doppler Shift
37 Full System

38 Full System
39 Evaluation
40 Evaluation - Rabbit
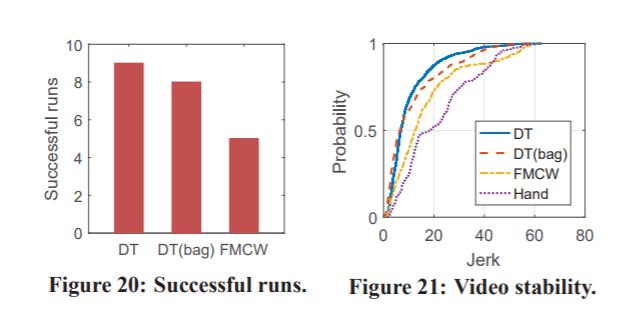
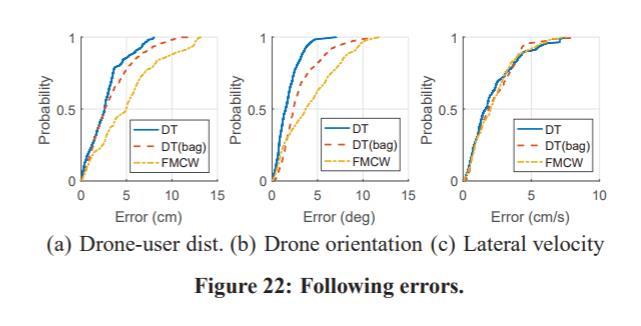
41 Evaluation Full System
42 Evaluation Full System
43 Evaluation Real World Trajectory
44 Evaluation Resource Usage and Delay Power: 3% per 10 minutes on a Galaxy S7
45 Discussion
Indoor Follow Me Drone
 Indoor Follow Me Drone Wenguang Mao, Zaiwei Zhang, Lili Qiu, Jian He, Yuchen Cui, and Sangki Yun The University of Texas at Austin, Hewlett Packard Labs {wmao,zaiwei9,lili,jianhe,yuchen93}@cs.utexas.edu,
Indoor Follow Me Drone Wenguang Mao, Zaiwei Zhang, Lili Qiu, Jian He, Yuchen Cui, and Sangki Yun The University of Texas at Austin, Hewlett Packard Labs {wmao,zaiwei9,lili,jianhe,yuchen93}@cs.utexas.edu,
Systematical Methods to Counter Drones in Controlled Manners
 Systematical Methods to Counter Drones in Controlled Manners Wenxin Chen, Garrett Johnson, Yingfei Dong Dept. of Electrical Engineering University of Hawaii 1 System Models u Physical system y Controller
Systematical Methods to Counter Drones in Controlled Manners Wenxin Chen, Garrett Johnson, Yingfei Dong Dept. of Electrical Engineering University of Hawaii 1 System Models u Physical system y Controller
NavShoe Pedestrian Inertial Navigation Technology Brief
 NavShoe Pedestrian Inertial Navigation Technology Brief Eric Foxlin Aug. 8, 2006 WPI Workshop on Precision Indoor Personnel Location and Tracking for Emergency Responders The Problem GPS doesn t work indoors
NavShoe Pedestrian Inertial Navigation Technology Brief Eric Foxlin Aug. 8, 2006 WPI Workshop on Precision Indoor Personnel Location and Tracking for Emergency Responders The Problem GPS doesn t work indoors
Virtual Experiments as a Tool for Active Engagement
 Virtual Experiments as a Tool for Active Engagement Lei Bao Stephen Stonebraker Gyoungho Lee Physics Education Research Group Department of Physics The Ohio State University Context Cues and Knowledge
Virtual Experiments as a Tool for Active Engagement Lei Bao Stephen Stonebraker Gyoungho Lee Physics Education Research Group Department of Physics The Ohio State University Context Cues and Knowledge
CAT: High-Precision Acoustic Motion Tracking
 CAT: High-Precision Acoustic Motion Tracking Wenguang Mao, Jian He, and Lili Qiu The University of Texas at Austin {wmao,jianhe,lili}@cs.utexas.edu ABSTRACT Video games, Virtual Reality (VR), Augmented
CAT: High-Precision Acoustic Motion Tracking Wenguang Mao, Jian He, and Lili Qiu The University of Texas at Austin {wmao,jianhe,lili}@cs.utexas.edu ABSTRACT Video games, Virtual Reality (VR), Augmented
Doppler Simulator for 10 GHz Doppler Radar
 Doppler Simulator for 10 GHz Doppler Radar Presented by Ngeok Kuan Wai 2252462 Supervised by Prof. Dr.-Ing. K. Solbach Outline Motivation Doppler Radar and Doppler Simulator Phase shifter Other Electronic
Doppler Simulator for 10 GHz Doppler Radar Presented by Ngeok Kuan Wai 2252462 Supervised by Prof. Dr.-Ing. K. Solbach Outline Motivation Doppler Radar and Doppler Simulator Phase shifter Other Electronic
AN AIDED NAVIGATION POST PROCESSING FILTER FOR DETAILED SEABED MAPPING UUVS
 MODELING, IDENTIFICATION AND CONTROL, 1999, VOL. 20, NO. 3, 165-175 doi: 10.4173/mic.1999.3.2 AN AIDED NAVIGATION POST PROCESSING FILTER FOR DETAILED SEABED MAPPING UUVS Kenneth Gade and Bjørn Jalving
MODELING, IDENTIFICATION AND CONTROL, 1999, VOL. 20, NO. 3, 165-175 doi: 10.4173/mic.1999.3.2 AN AIDED NAVIGATION POST PROCESSING FILTER FOR DETAILED SEABED MAPPING UUVS Kenneth Gade and Bjørn Jalving
It is well known that GNSS signals
 GNSS Solutions: Multipath vs. NLOS signals GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are invited to send their questions to the columnist,
GNSS Solutions: Multipath vs. NLOS signals GNSS Solutions is a regular column featuring questions and answers about technical aspects of GNSS. Readers are invited to send their questions to the columnist,
Tracking of Rapidly Time-Varying Sparse Underwater Acoustic Communication Channels
 Tracking of Rapidly Time-Varying Sparse Underwater Acoustic Communication Channels Weichang Li WHOI Mail Stop 9, Woods Hole, MA 02543 phone: (508) 289-3680 fax: (508) 457-2194 email: wli@whoi.edu James
Tracking of Rapidly Time-Varying Sparse Underwater Acoustic Communication Channels Weichang Li WHOI Mail Stop 9, Woods Hole, MA 02543 phone: (508) 289-3680 fax: (508) 457-2194 email: wli@whoi.edu James
GPS data correction using encoders and INS sensors
 GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
An E911 Location Method using Arbitrary Transmission Signals
 An E911 Location Method using Arbitrary Transmission Signals Described herein is a new technology capable of locating a cell phone or other mobile communication device byway of already existing infrastructure.
An E911 Location Method using Arbitrary Transmission Signals Described herein is a new technology capable of locating a cell phone or other mobile communication device byway of already existing infrastructure.
Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation
 Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation Zhaonian Zhang, Department of Geomatics Engineering, The University of Calgary BIOGRAPHY Zhaonian Zhang is a MSc student
Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation Zhaonian Zhang, Department of Geomatics Engineering, The University of Calgary BIOGRAPHY Zhaonian Zhang is a MSc student
Cooperative localization (part I) Jouni Rantakokko
 Jouni Rantakokko") Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
True Ground Speed Measurement and Height Awareness of. UAV by Radar Transceiver 2. OBJECTIVE 3. PRINCIPLE
 True Ground Speed Measurement and Height Awareness of UAV by Radar Transceiver Haoyang Ye Zhejiang University ABSTRACT The goal of this project is to use radar transceiver to design a system, which could
True Ground Speed Measurement and Height Awareness of UAV by Radar Transceiver Haoyang Ye Zhejiang University ABSTRACT The goal of this project is to use radar transceiver to design a system, which could
The Challenge: Increasing Accuracy and Decreasing Cost
 Solving Mobile Radar Measurement Challenges By Dingqing Lu, Keysight Technologies, Inc. Modern radar systems are exceptionally complex, encompassing intricate constructions with advanced technology from
Solving Mobile Radar Measurement Challenges By Dingqing Lu, Keysight Technologies, Inc. Modern radar systems are exceptionally complex, encompassing intricate constructions with advanced technology from
Implementation and Performance Evaluation of a Fast Relocation Method in a GPS/SINS/CSAC Integrated Navigation System Hardware Prototype
 This article has been accepted and published on J-STAGE in advance of copyediting. Content is final as presented. Implementation and Performance Evaluation of a Fast Relocation Method in a GPS/SINS/CSAC
This article has been accepted and published on J-STAGE in advance of copyediting. Content is final as presented. Implementation and Performance Evaluation of a Fast Relocation Method in a GPS/SINS/CSAC
Approaches for Angle of Arrival Estimation. Wenguang Mao
 Approaches for Angle of Arrival Estimation Wenguang Mao Angle of Arrival (AoA) Definition: the elevation and azimuth angle of incoming signals Also called direction of arrival (DoA) AoA Estimation Applications:
Approaches for Angle of Arrival Estimation Wenguang Mao Angle of Arrival (AoA) Definition: the elevation and azimuth angle of incoming signals Also called direction of arrival (DoA) AoA Estimation Applications:
Detection and Identification of Remotely Piloted Aircraft Systems Using Weather Radar
 Microwave Remote Sensing Laboratory Detection and Identification of Remotely Piloted Aircraft Systems Using Weather Radar Krzysztof Orzel1 Siddhartan Govindasamy2, Andrew Bennett2 David Pepyne1 and Stephen
Microwave Remote Sensing Laboratory Detection and Identification of Remotely Piloted Aircraft Systems Using Weather Radar Krzysztof Orzel1 Siddhartan Govindasamy2, Andrew Bennett2 David Pepyne1 and Stephen
Improved GPS Carrier Phase Tracking in Difficult Environments Using Vector Tracking Approach
 Improved GPS Carrier Phase Tracking in Difficult Environments Using Vector Tracking Approach Scott M. Martin David M. Bevly Auburn University GPS and Vehicle Dynamics Laboratory Presentation Overview Introduction
Improved GPS Carrier Phase Tracking in Difficult Environments Using Vector Tracking Approach Scott M. Martin David M. Bevly Auburn University GPS and Vehicle Dynamics Laboratory Presentation Overview Introduction
Assessing the likelihood of GNSS spoofing attacks on RPAS
 Assessing the likelihood of GNSS spoofing attacks on RPAS Mike Maarse UvA/NLR 30-06-2016 Mike Maarse (UvA/NLR) RP2 Presentation 30-06-2016 1 / 25 Introduction Motivation/relevance Growing number of RPAS
Assessing the likelihood of GNSS spoofing attacks on RPAS Mike Maarse UvA/NLR 30-06-2016 Mike Maarse (UvA/NLR) RP2 Presentation 30-06-2016 1 / 25 Introduction Motivation/relevance Growing number of RPAS
HeadScan: A Wearable System for Radio-based Sensing of Head and Mouth-related Activities
 HeadScan: A Wearable System for Radio-based Sensing of Head and Mouth-related Activities Biyi Fang Department of Electrical and Computer Engineering Michigan State University Biyi Fang Nicholas D. Lane
HeadScan: A Wearable System for Radio-based Sensing of Head and Mouth-related Activities Biyi Fang Department of Electrical and Computer Engineering Michigan State University Biyi Fang Nicholas D. Lane
Estimation and Control of Lateral Displacement of Electric Vehicle Using WPT Information
 Estimation and Control of Lateral Displacement of Electric Vehicle Using WPT Information Pakorn Sukprasert Department of Electrical Engineering and Information Systems, The University of Tokyo Tokyo, Japan
Estimation and Control of Lateral Displacement of Electric Vehicle Using WPT Information Pakorn Sukprasert Department of Electrical Engineering and Information Systems, The University of Tokyo Tokyo, Japan
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Analysis of Processing Parameters of GPS Signal Acquisition Scheme
 Analysis of Processing Parameters of GPS Signal Acquisition Scheme Prof. Vrushali Bhatt, Nithin Krishnan Department of Electronics and Telecommunication Thakur College of Engineering and Technology Mumbai-400101,
Analysis of Processing Parameters of GPS Signal Acquisition Scheme Prof. Vrushali Bhatt, Nithin Krishnan Department of Electronics and Telecommunication Thakur College of Engineering and Technology Mumbai-400101,
Applications & Theory
 Applications & Theory Azadeh Kushki azadeh.kushki@ieee.org Professor K N Plataniotis Professor K.N. Plataniotis Professor A.N. Venetsanopoulos Presentation Outline 2 Part I: The case for WLAN positioning
Applications & Theory Azadeh Kushki azadeh.kushki@ieee.org Professor K N Plataniotis Professor K.N. Plataniotis Professor A.N. Venetsanopoulos Presentation Outline 2 Part I: The case for WLAN positioning
PHINS, An All-In-One Sensor for DP Applications
 DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
Utilizing Batch Processing for GNSS Signal Tracking
 Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
Design and Testing of an Intelligent GPS Tracking Loop for Noise Reduction and High Dynamics Applications
 Design and Testing of an Intelligent GPS Tracking Loop for Noise Reduction and High Dynamics Applications By: Ahmed M. Kamel Position, Location And Navigation (PLAN) Group Department of Geomatics Engineering
Design and Testing of an Intelligent GPS Tracking Loop for Noise Reduction and High Dynamics Applications By: Ahmed M. Kamel Position, Location And Navigation (PLAN) Group Department of Geomatics Engineering
SERIES VECTORNAV TACTICAL SERIES VN-110 IMU/AHRS VN-210 GNSS/INS VN-310 DUAL GNSS/INS
 TACTICAL VECTORNAV SERIES TACTICAL SERIES VN110 IMU/AHRS VN210 GNSS/INS VN310 DUAL GNSS/INS VectorNav introduces the Tactical Series, a nextgeneration, MEMS inertial navigation platform that features highperformance
TACTICAL VECTORNAV SERIES TACTICAL SERIES VN110 IMU/AHRS VN210 GNSS/INS VN310 DUAL GNSS/INS VectorNav introduces the Tactical Series, a nextgeneration, MEMS inertial navigation platform that features highperformance
OPPORTUNISTIC SENSING WITH MIC ARRAYS ON SMART SPEAKERS FOR DISTAL INTERACTION AND EXERCISE TRACKING
 OPPORTUNISTIC SENSING WITH MIC ARRAYS ON SMART SPEAKERS FOR DISTAL INTERACTION AND EXERCISE TRACKING Anup Agarwal Mohit Jain Pratyush Kumar Shwetak Patel IBM Research, India IIT Guwahati, India University
OPPORTUNISTIC SENSING WITH MIC ARRAYS ON SMART SPEAKERS FOR DISTAL INTERACTION AND EXERCISE TRACKING Anup Agarwal Mohit Jain Pratyush Kumar Shwetak Patel IBM Research, India IIT Guwahati, India University
Kongsberg Seatex AS Pirsenteret N-7462 Trondheim Norway POSITION 303 VELOCITY 900 HEADING 910 ATTITUDE 413 HEAVE 888
 WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: GPS SEAPATH Kongsberg
WinFrog Device Group: Device Name/Model: Device Manufacturer: Device Data String(s) Output to WinFrog: WinFrog Data String(s) Output to Device: WinFrog Data Item(s) and their RAW record: GPS SEAPATH Kongsberg
Designing Information Devices and Systems I Fall 2016 Babak Ayazifar, Vladimir Stojanovic Homework 11
 EECS 16A Designing Information Devices and Systems I Fall 2016 Babak Ayazifar, Vladimir Stojanovic Homework 11 This homework is due Nov 15, 2016, at 1PM. 1. Homework process and study group Who else did
EECS 16A Designing Information Devices and Systems I Fall 2016 Babak Ayazifar, Vladimir Stojanovic Homework 11 This homework is due Nov 15, 2016, at 1PM. 1. Homework process and study group Who else did
Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO
 Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO Weimin Huang 1, Tao Yang 1, Liang Jing Yang 2, Chee Kong Chui 2, Jimmy Liu 1, Jiayin Zhou 1, Jing Zhang 1, Yi Su 3, Stephen
Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO Weimin Huang 1, Tao Yang 1, Liang Jing Yang 2, Chee Kong Chui 2, Jimmy Liu 1, Jiayin Zhou 1, Jing Zhang 1, Yi Su 3, Stephen
GUIDED WEAPONS RADAR TESTING
 GUIDED WEAPONS RADAR TESTING by Richard H. Bryan ABSTRACT An overview of non-destructive real-time testing of missiles is discussed in this paper. This testing has become known as hardware-in-the-loop
GUIDED WEAPONS RADAR TESTING by Richard H. Bryan ABSTRACT An overview of non-destructive real-time testing of missiles is discussed in this paper. This testing has become known as hardware-in-the-loop
ELECTROMAGNETIC WAVES PIER 92. Progress In Electromagnetics Research
 ELECTROMAGNETIC WAVES PIER 92 Progress In Electromagnetics Research c 2009 EMW Publishing. All rights reserved. No part of this publication may be reproduced. Request for permission should be addressed
ELECTROMAGNETIC WAVES PIER 92 Progress In Electromagnetics Research c 2009 EMW Publishing. All rights reserved. No part of this publication may be reproduced. Request for permission should be addressed
Worst-Case GPS Constellation for Testing Navigation at Geosynchronous Orbit for GOES-R
 Worst-Case GPS Constellation for Testing Navigation at Geosynchronous Orbit for GOES-R Kristin Larson, Dave Gaylor, and Stephen Winkler Emergent Space Technologies and Lockheed Martin Space Systems 36
Worst-Case GPS Constellation for Testing Navigation at Geosynchronous Orbit for GOES-R Kristin Larson, Dave Gaylor, and Stephen Winkler Emergent Space Technologies and Lockheed Martin Space Systems 36
Revisions Revision Date By Changes A 11 Feb 2013 MHA Initial release , Xsens Technologies B.V. All rights reserved. Information in this docum
 MTi 10-series and MTi 100-series Document MT0503P, Revision 0 (DRAFT), 11 Feb 2013 Xsens Technologies B.V. Pantheon 6a P.O. Box 559 7500 AN Enschede The Netherlands phone +31 (0)88 973 67 00 fax +31 (0)88
MTi 10-series and MTi 100-series Document MT0503P, Revision 0 (DRAFT), 11 Feb 2013 Xsens Technologies B.V. Pantheon 6a P.O. Box 559 7500 AN Enschede The Netherlands phone +31 (0)88 973 67 00 fax +31 (0)88
Radio Deep Learning Efforts Showcase Presentation
 Radio Deep Learning Efforts Showcase Presentation November 2016 hume@vt.edu www.hume.vt.edu Tim O Shea Senior Research Associate Program Overview Program Objective: Rethink fundamental approaches to how
Radio Deep Learning Efforts Showcase Presentation November 2016 hume@vt.edu www.hume.vt.edu Tim O Shea Senior Research Associate Program Overview Program Objective: Rethink fundamental approaches to how
3DM -CV5-10 LORD DATASHEET. Inertial Measurement Unit (IMU) Product Highlights. Features and Benefits. Applications. Best in Class Performance
 Product Highlights. Features and Benefits. Applications. Best in Class Performance") LORD DATASHEET 3DM -CV5-10 Inertial Measurement Unit (IMU) Product Highlights Triaxial accelerometer, gyroscope, and sensors achieve the optimal combination of measurement qualities Smallest, lightest,
LORD DATASHEET 3DM -CV5-10 Inertial Measurement Unit (IMU) Product Highlights Triaxial accelerometer, gyroscope, and sensors achieve the optimal combination of measurement qualities Smallest, lightest,
Smart Range of Burst fuzes
 Real-Time Target Simulator Rob van Heijster Contents : Threat: Fast Incoming Attack Craft (FIAC) Multi function fuze against FIAC Threat analysis Necessity for additional function: Range of Burst function
Real-Time Target Simulator Rob van Heijster Contents : Threat: Fast Incoming Attack Craft (FIAC) Multi function fuze against FIAC Threat analysis Necessity for additional function: Range of Burst function
USBL positioning and communication SyStEmS. product information GUidE
 USBL positioning and communication SyStEmS product information GUidE evologics s2c R usbl - series underwater positioning and communication systems EvoLogics S2CR USBL is a series of combined positioning
USBL positioning and communication SyStEmS product information GUidE evologics s2c R usbl - series underwater positioning and communication systems EvoLogics S2CR USBL is a series of combined positioning
Self Localization Using A Modulated Acoustic Chirp
 Self Localization Using A Modulated Acoustic Chirp Brian P. Flanagan The MITRE Corporation, 7515 Colshire Dr., McLean, VA 2212, USA; bflan@mitre.org ABSTRACT This paper describes a robust self localization
Self Localization Using A Modulated Acoustic Chirp Brian P. Flanagan The MITRE Corporation, 7515 Colshire Dr., McLean, VA 2212, USA; bflan@mitre.org ABSTRACT This paper describes a robust self localization
Ofcom Systems Team. FCS BR18 Chateau Impney. Paul Jarvis. Monitoring Solutions. Baldock Radio Station Royston Road Baldock Herts
 FCS BR18 Chateau Impney Ofcom Systems Team Monitoring Solutions Baldock Radio Station Royston Road Baldock Herts Paul Jarvis Contents Introduction to the Technical Systems Team Overview Transmitter location
FCS BR18 Chateau Impney Ofcom Systems Team Monitoring Solutions Baldock Radio Station Royston Road Baldock Herts Paul Jarvis Contents Introduction to the Technical Systems Team Overview Transmitter location
RF DOMAIN CHANNEL EMULATION TECHNIQUES WITH SAW FILTERS
 RF DOMAIN CHANNEL EMULATION TECHNIQUES WITH SAW FILTERS Murat Karabacak (University of South Florida, Tampa, FL; murat@mail.usf.edu); Alphan Şahin (University of South Florida, Tampa, FL; alphan@mail.usf.edu);
RF DOMAIN CHANNEL EMULATION TECHNIQUES WITH SAW FILTERS Murat Karabacak (University of South Florida, Tampa, FL; murat@mail.usf.edu); Alphan Şahin (University of South Florida, Tampa, FL; alphan@mail.usf.edu);
Integrated Navigation System
 Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Orion-S GPS Receiver Software Validation
 Space Flight Technology, German Space Operations Center (GSOC) Deutsches Zentrum für Luft- und Raumfahrt (DLR) e.v. O. Montenbruck Doc. No. : GTN-TST-11 Version : 1.1 Date : July 9, 23 Document Title:
Space Flight Technology, German Space Operations Center (GSOC) Deutsches Zentrum für Luft- und Raumfahrt (DLR) e.v. O. Montenbruck Doc. No. : GTN-TST-11 Version : 1.1 Date : July 9, 23 Document Title:
Direction of Arrival Estimation in Smart Antenna for Marine Communication. Deepthy M Vijayan, Sreedevi K Menon /16/$31.
 International Conference on Communication and Signal Processing, April 6-8, 2016, India Direction of Arrival Estimation in Smart Antenna for Marine Communication Deepthy M Vijayan, Sreedevi K Menon Abstract
International Conference on Communication and Signal Processing, April 6-8, 2016, India Direction of Arrival Estimation in Smart Antenna for Marine Communication Deepthy M Vijayan, Sreedevi K Menon Abstract
Advanced Integrated Concepts for the IlliniSat 2 Bus John Warner and Erik Kroeker Department of Aerospace Engineering University of Illinois at
 Advanced Integrated Concepts for the IlliniSat 2 Bus John Warner and Erik Kroeker Department of Aerospace Engineering University of Illinois at Urbana Champaign Outline ADACS Problem Statement AD Architecture
Advanced Integrated Concepts for the IlliniSat 2 Bus John Warner and Erik Kroeker Department of Aerospace Engineering University of Illinois at Urbana Champaign Outline ADACS Problem Statement AD Architecture
Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions
 Table of Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions page xiii xix xx xxi xxv Part I GNSS: orbits, signals, and methods 1 GNSS ground
Table of Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions page xiii xix xx xxi xxv Part I GNSS: orbits, signals, and methods 1 GNSS ground
Tracking Algorithms for Multipath-Aided Indoor Localization
 Tracking Algorithms for Multipath-Aided Indoor Localization Paul Meissner and Klaus Witrisal Graz University of Technology, Austria th UWB Forum on Sensing and Communication, May 5, Meissner, Witrisal
Tracking Algorithms for Multipath-Aided Indoor Localization Paul Meissner and Klaus Witrisal Graz University of Technology, Austria th UWB Forum on Sensing and Communication, May 5, Meissner, Witrisal
Measurements and Metrology for 5G
 Measurements and Metrology for 5G Nada Golmie Wireless Networks Division Communications Technology National Institute of Standards and Technology NIST s Communication Technology - Mission Material Measurement
Measurements and Metrology for 5G Nada Golmie Wireless Networks Division Communications Technology National Institute of Standards and Technology NIST s Communication Technology - Mission Material Measurement
Pedestrian Navigation System Using. Shoe-mounted INS. By Yan Li. A thesis submitted for the degree of Master of Engineering (Research)
") Pedestrian Navigation System Using Shoe-mounted INS By Yan Li A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information Technology University of Technology,
Pedestrian Navigation System Using Shoe-mounted INS By Yan Li A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information Technology University of Technology,
412 th Test Wing. War-Winning Capabilities On Time, On Cost. Lessons Learned While Giving Unaugmented Airplanes to Augmentation-Dependent Pilots
 412 th Test Wing War-Winning Capabilities On Time, On Cost Lessons Learned While Giving Unaugmented Airplanes to Augmentation-Dependent Pilots 20 Nov 2012 Bill Gray USAF TPS/CP Phone: 661-277-2761 Approved
412 th Test Wing War-Winning Capabilities On Time, On Cost Lessons Learned While Giving Unaugmented Airplanes to Augmentation-Dependent Pilots 20 Nov 2012 Bill Gray USAF TPS/CP Phone: 661-277-2761 Approved
Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications
 Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications Young-Woo Seo and Ragunathan (Raj) Rajkumar GM-CMU Autonomous Driving Collaborative Research Lab Carnegie Mellon University
Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications Young-Woo Seo and Ragunathan (Raj) Rajkumar GM-CMU Autonomous Driving Collaborative Research Lab Carnegie Mellon University
An Ultra Wideband Local Positioning System for Highly Complex Indoor Environments
 An Ultra Wideband Local Positioning System for Highly Complex Indoor Environments Benjamin Waldmann, Robert Weigel Institute for Electronics Engineering University of Erlangen Nuremberg Randolf Ebelt,
An Ultra Wideband Local Positioning System for Highly Complex Indoor Environments Benjamin Waldmann, Robert Weigel Institute for Electronics Engineering University of Erlangen Nuremberg Randolf Ebelt,
Design and Implementation of Inertial Navigation System
 Design and Implementation of Inertial Navigation System Ms. Pooja M Asangi PG Student, Digital Communicatiom Department of Telecommunication CMRIT College Bangalore, India Mrs. Sujatha S Associate Professor
Design and Implementation of Inertial Navigation System Ms. Pooja M Asangi PG Student, Digital Communicatiom Department of Telecommunication CMRIT College Bangalore, India Mrs. Sujatha S Associate Professor
Waves and Devices Chapter of IEEE Phoenix
 Waves and Devices Chapter of IEEE Phoenix Rotor Blade Modulation November 19, 2014 Ron Lavin Assoc. Technical Fellow The Boeing Company Mesa, Arizona ronald.o.lavin@boeing.com Contents Introduction to
Waves and Devices Chapter of IEEE Phoenix Rotor Blade Modulation November 19, 2014 Ron Lavin Assoc. Technical Fellow The Boeing Company Mesa, Arizona ronald.o.lavin@boeing.com Contents Introduction to
Satellite and Inertial Attitude. A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu
 Satellite and Inertial Attitude and Positioning System A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu Outline Project Introduction Theoretical Background Inertial
Satellite and Inertial Attitude and Positioning System A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu Outline Project Introduction Theoretical Background Inertial
FILA: Fine-grained Indoor Localization
 IEEE 2012 INFOCOM FILA: Fine-grained Indoor Localization Kaishun Wu, Jiang Xiao, Youwen Yi, Min Gao, Lionel M. Ni Hong Kong University of Science and Technology March 29 th, 2012 Outline Introduction Motivation
IEEE 2012 INFOCOM FILA: Fine-grained Indoor Localization Kaishun Wu, Jiang Xiao, Youwen Yi, Min Gao, Lionel M. Ni Hong Kong University of Science and Technology March 29 th, 2012 Outline Introduction Motivation
TigreSAT 2010 &2011 June Monthly Report
 2010-2011 TigreSAT Monthly Progress Report EQUIS ADS 2010 PAYLOAD No changes have been done to the payload since it had passed all the tests, requirements and integration that are necessary for LSU HASP
2010-2011 TigreSAT Monthly Progress Report EQUIS ADS 2010 PAYLOAD No changes have been done to the payload since it had passed all the tests, requirements and integration that are necessary for LSU HASP
Parallel Channel Sounder for MIMO Communications
 Parallel Channel Sounder for MIMO Communications Wuxiong ZHANG, Ph.D., Associate Professor SHanghai Institute of Fog CompuTing (SHIFT) Shanghai Research Center for Wireless COmmunications (WiCO) Shanghai
Parallel Channel Sounder for MIMO Communications Wuxiong ZHANG, Ph.D., Associate Professor SHanghai Institute of Fog CompuTing (SHIFT) Shanghai Research Center for Wireless COmmunications (WiCO) Shanghai
SX-NSR 2.0 A Multi-frequency and Multi-sensor Software Receiver with a Quad-band RF Front End
 SX-NSR 2.0 A Multi-frequency and Multi-sensor Software Receiver with a Quad-band RF Front End - with its use for Reflectometry - N. Falk, T. Hartmann, H. Kern, B. Riedl, T. Pany, R. Wolf, J.Winkel, IFEN
SX-NSR 2.0 A Multi-frequency and Multi-sensor Software Receiver with a Quad-band RF Front End - with its use for Reflectometry - N. Falk, T. Hartmann, H. Kern, B. Riedl, T. Pany, R. Wolf, J.Winkel, IFEN
SENLUTION Miniature Angular & Heading Reference System The World s Smallest Mini-AHRS
 SENLUTION Miniature Angular & Heading Reference System The World s Smallest Mini-AHRS MotionCore, the smallest size AHRS in the world, is an ultra-small form factor, highly accurate inertia system based
SENLUTION Miniature Angular & Heading Reference System The World s Smallest Mini-AHRS MotionCore, the smallest size AHRS in the world, is an ultra-small form factor, highly accurate inertia system based
Performance Improvement of Receivers Based on Ultra-Tight Integration in GNSS-Challenged Environments
 Sensors 013, 13, 16406-1643; doi:10.3390/s13116406 Article OPEN ACCESS sensors ISSN 144-80 www.mdpi.com/journal/sensors Performance Improvement of Receivers Based on Ultra-Tight Integration in GNSS-Challenged
Sensors 013, 13, 16406-1643; doi:10.3390/s13116406 Article OPEN ACCESS sensors ISSN 144-80 www.mdpi.com/journal/sensors Performance Improvement of Receivers Based on Ultra-Tight Integration in GNSS-Challenged
Indoor Positioning by the Fusion of Wireless Metrics and Sensors
 Indoor Positioning by the Fusion of Wireless Metrics and Sensors Asst. Prof. Dr. Özgür TAMER Dokuz Eylül University Electrical and Electronics Eng. Dept Indoor Positioning Indoor positioning systems (IPS)
Indoor Positioning by the Fusion of Wireless Metrics and Sensors Asst. Prof. Dr. Özgür TAMER Dokuz Eylül University Electrical and Electronics Eng. Dept Indoor Positioning Indoor positioning systems (IPS)
Position Location using Radio Fingerprints in Wireless Networks. Prashant Krishnamurthy Graduate Program in Telecom & Networking
 Position Location using Radio Fingerprints in Wireless Networks Prashant Krishnamurthy Graduate Program in Telecom & Networking Agenda Introduction Radio Fingerprints What Industry is Doing Research Conclusions
Position Location using Radio Fingerprints in Wireless Networks Prashant Krishnamurthy Graduate Program in Telecom & Networking Agenda Introduction Radio Fingerprints What Industry is Doing Research Conclusions
Performance Analysis of (TDD) Massive MIMO with Kalman Channel Prediction
 Massive MIMO with Kalman Channel Prediction") Performance Analysis of (TDD) Massive MIMO with Kalman Channel Prediction Salil Kashyap, Christopher Mollén, Björnson Emil and Erik G. Larsson Conference Publication Original Publication: N.B.: When citing
Performance Analysis of (TDD) Massive MIMO with Kalman Channel Prediction Salil Kashyap, Christopher Mollén, Björnson Emil and Erik G. Larsson Conference Publication Original Publication: N.B.: When citing
Simulating and Testing of Signal Processing Methods for Frequency Stepped Chirp Radar
 Test & Measurement Simulating and Testing of Signal Processing Methods for Frequency Stepped Chirp Radar Modern radar systems serve a broad range of commercial, civil, scientific and military applications.
Test & Measurement Simulating and Testing of Signal Processing Methods for Frequency Stepped Chirp Radar Modern radar systems serve a broad range of commercial, civil, scientific and military applications.
CEPT Workshop on Spectrum for Drones / UAS. Detection of Drones - Research Project AMBOS - Copenhagen, 29 June 2018
 Abwehr von unbemannten Flugobjekten für Behörden und Organisationen mit Sicherheitsaufgaben CEPT Workshop on Spectrum for Drones / UAS Detection of Drones - Research Project AMBOS - Copenhagen, 29 June
Abwehr von unbemannten Flugobjekten für Behörden und Organisationen mit Sicherheitsaufgaben CEPT Workshop on Spectrum for Drones / UAS Detection of Drones - Research Project AMBOS - Copenhagen, 29 June
Real World Results from a Signal Measurement Drone
 Real World Results from a Signal Measurement Drone Presented by Ian Gair SixArms IEEE BTS October 2017 1 Outline of this Presentation What we are measuring Quick recap of Drone Based measurements Case
Real World Results from a Signal Measurement Drone Presented by Ian Gair SixArms IEEE BTS October 2017 1 Outline of this Presentation What we are measuring Quick recap of Drone Based measurements Case
Test Solutions for Simulating Realistic GNSS Scenarios
 Test Solutions for Simulating Realistic GNSS Scenarios Author Markus Irsigler, Rohde & Schwarz GmbH & Co. KG Biography Markus Irsigler received his diploma in Geodesy and Geomatics from the University
Test Solutions for Simulating Realistic GNSS Scenarios Author Markus Irsigler, Rohde & Schwarz GmbH & Co. KG Biography Markus Irsigler received his diploma in Geodesy and Geomatics from the University
27/11/2013' OCEANOGRAPHIC APPLICATIONS. Acoustic Current Meters
 egm502 seafloor mapping lecture 17 water column applications OCEANOGRAPHIC APPLICATIONS Acoustic Current Meters An acoustic current meter is a set of transducers fixed in a frame. Acoustic current meters
egm502 seafloor mapping lecture 17 water column applications OCEANOGRAPHIC APPLICATIONS Acoustic Current Meters An acoustic current meter is a set of transducers fixed in a frame. Acoustic current meters
ACOUSTIC RESEARCH FOR PORT PROTECTION AT THE STEVENS MARITIME SECURITY LABORATORY
 ACOUSTIC RESEARCH FOR PORT PROTECTION AT THE STEVENS MARITIME SECURITY LABORATORY Alexander Sutin, Barry Bunin Stevens Institute of Technology, Castle Point on Hudson, Hoboken, NJ 07030, United States
ACOUSTIC RESEARCH FOR PORT PROTECTION AT THE STEVENS MARITIME SECURITY LABORATORY Alexander Sutin, Barry Bunin Stevens Institute of Technology, Castle Point on Hudson, Hoboken, NJ 07030, United States
LASER RANGE FINDING BASED ON CORRELATION METHOD
 LASER RANGE FINDING BASED ON CORRELATION METHOD B. Journet and J.C. Lourme Laboratoire d'electricité Signaux et Robotique Ecole Normale Supérieure de Cachan, France Abstract: The purpose of the paper is
LASER RANGE FINDING BASED ON CORRELATION METHOD B. Journet and J.C. Lourme Laboratoire d'electricité Signaux et Robotique Ecole Normale Supérieure de Cachan, France Abstract: The purpose of the paper is
Improving method of real-time offset tuning for arterial signal coordination using probe trajectory data
 Special Issue Article Improving method of real-time offset tuning for arterial signal coordination using probe trajectory data Advances in Mechanical Engineering 2017, Vol. 9(1) 1 7 Ó The Author(s) 2017
Special Issue Article Improving method of real-time offset tuning for arterial signal coordination using probe trajectory data Advances in Mechanical Engineering 2017, Vol. 9(1) 1 7 Ó The Author(s) 2017
Error Analysis of a Low Cost TDoA Sensor Network
 Error Analysis of a Low Cost TDoA Sensor Network Noha El Gemayel, Holger Jäkel and Friedrich K. Jondral Communications Engineering Lab, Karlsruhe Institute of Technology (KIT), Germany {noha.gemayel, holger.jaekel,
Error Analysis of a Low Cost TDoA Sensor Network Noha El Gemayel, Holger Jäkel and Friedrich K. Jondral Communications Engineering Lab, Karlsruhe Institute of Technology (KIT), Germany {noha.gemayel, holger.jaekel,
Integrated Multi-Sensor Testing of EW/Radar Platforms Dr. Bob Andrews
 Integrated Multi-Sensor Testing of EW/Radar Platforms Dr. Bob Andrews 27-05-08 1 Summary and Overview o Legacy defensive aids and their testability o Modern DASS sensor fusion o Requirement for multi-sensor,
Integrated Multi-Sensor Testing of EW/Radar Platforms Dr. Bob Andrews 27-05-08 1 Summary and Overview o Legacy defensive aids and their testability o Modern DASS sensor fusion o Requirement for multi-sensor,
Bluetooth Angle Estimation for Real-Time Locationing
 Whitepaper Bluetooth Angle Estimation for Real-Time Locationing By Sauli Lehtimäki Senior Software Engineer, Silicon Labs silabs.com Smart. Connected. Energy-Friendly. Bluetooth Angle Estimation for Real-
Whitepaper Bluetooth Angle Estimation for Real-Time Locationing By Sauli Lehtimäki Senior Software Engineer, Silicon Labs silabs.com Smart. Connected. Energy-Friendly. Bluetooth Angle Estimation for Real-
Roadside Range Sensors for Intersection Decision Support
 Roadside Range Sensors for Intersection Decision Support Arvind Menon, Alec Gorjestani, Craig Shankwitz and Max Donath, Member, IEEE Abstract The Intelligent Transportation Institute at the University
Roadside Range Sensors for Intersection Decision Support Arvind Menon, Alec Gorjestani, Craig Shankwitz and Max Donath, Member, IEEE Abstract The Intelligent Transportation Institute at the University
USBL positioning and communication systems. Applications
 USBL positioning and communication systems Offering a powerful USBL transceiver functionality with full benefits of an S2C technology communication link Applications Positioning of offshore equipment >
USBL positioning and communication systems Offering a powerful USBL transceiver functionality with full benefits of an S2C technology communication link Applications Positioning of offshore equipment >
If you want to use an inertial measurement system...
 If you want to use an inertial measurement system...... which technical data you should analyse and compare before making your decision by Dr.-Ing. E. v. Hinueber, imar Navigation GmbH Keywords: inertial
If you want to use an inertial measurement system...... which technical data you should analyse and compare before making your decision by Dr.-Ing. E. v. Hinueber, imar Navigation GmbH Keywords: inertial
Personal Sensing. Tarek Abdelzaher. Dept. of Computer Science University of Illinois at Urbana Champaign
 Personal Sensing Tarek Abdelzaher Dept. of Computer Science University of Illinois at Urbana Champaign Review: Localization with a Single LED Can you simultaneously localize a large number of optical receivers
Personal Sensing Tarek Abdelzaher Dept. of Computer Science University of Illinois at Urbana Champaign Review: Localization with a Single LED Can you simultaneously localize a large number of optical receivers
Introducing the Quadrotor Flying Robot
 Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
3. give specific seminars on topics related to assigned drill problems
 HIGH RESOLUTION AND IMAGING RADAR 1. Prerequisites Basic knowledge of radar principles. Good background in Mathematics and Physics. Basic knowledge of MATLAB programming. 2. Course format and dates The
HIGH RESOLUTION AND IMAGING RADAR 1. Prerequisites Basic knowledge of radar principles. Good background in Mathematics and Physics. Basic knowledge of MATLAB programming. 2. Course format and dates The
Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model
 Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model by Dr. Buddy H Jeun and John Younker Sensor Fusion Technology, LLC 4522 Village Springs Run
Applying Multisensor Information Fusion Technology to Develop an UAV Aircraft with Collision Avoidance Model by Dr. Buddy H Jeun and John Younker Sensor Fusion Technology, LLC 4522 Village Springs Run
Understanding Advanced Bluetooth Angle Estimation Techniques for Real-Time Locationing
 Understanding Advanced Bluetooth Angle Estimation Techniques for Real-Time Locationing EMBEDDED WORLD 2018 SAULI LEHTIMAKI, SILICON LABS Understanding Advanced Bluetooth Angle Estimation Techniques for
Understanding Advanced Bluetooth Angle Estimation Techniques for Real-Time Locationing EMBEDDED WORLD 2018 SAULI LEHTIMAKI, SILICON LABS Understanding Advanced Bluetooth Angle Estimation Techniques for
Improved Pedestrian Navigation Based on Drift-Reduced NavChip MEMS IMU
 Improved Pedestrian Navigation Based on Drift-Reduced NavChip MEMS IMU Eric Foxlin Aug. 3, 2009 WPI Workshop on Precision Indoor Personnel Location and Tracking for Emergency Responders Outline Summary
Improved Pedestrian Navigation Based on Drift-Reduced NavChip MEMS IMU Eric Foxlin Aug. 3, 2009 WPI Workshop on Precision Indoor Personnel Location and Tracking for Emergency Responders Outline Summary
Cognitive Ultra Wideband Radio
 Cognitive Ultra Wideband Radio Soodeh Amiri M.S student of the communication engineering The Electrical & Computer Department of Isfahan University of Technology, IUT E-Mail : s.amiridoomari@ec.iut.ac.ir
Cognitive Ultra Wideband Radio Soodeh Amiri M.S student of the communication engineering The Electrical & Computer Department of Isfahan University of Technology, IUT E-Mail : s.amiridoomari@ec.iut.ac.ir
Sonar imaging of structured sparse scene using template compressed sensing
 Sonar imaging of structured sparse scene using template compressed sensing Huichen Yan, Xudong Zhang, Shibao Peng Tsinghua University, Beijing, China Jia Xu Beijing Institute of Technology, Beijing, China
Sonar imaging of structured sparse scene using template compressed sensing Huichen Yan, Xudong Zhang, Shibao Peng Tsinghua University, Beijing, China Jia Xu Beijing Institute of Technology, Beijing, China
GPS Based Attitude Determination for the Flying Laptop Satellite
 GPS Based Attitude Determination for the Flying Laptop Satellite André Hauschild 1,3, Georg Grillmayer 2, Oliver Montenbruck 1, Markus Markgraf 1, Peter Vörsmann 3 1 DLR/GSOC, Oberpfaffenhofen, Germany
GPS Based Attitude Determination for the Flying Laptop Satellite André Hauschild 1,3, Georg Grillmayer 2, Oliver Montenbruck 1, Markus Markgraf 1, Peter Vörsmann 3 1 DLR/GSOC, Oberpfaffenhofen, Germany
GPS Anti-jamming Performance Simulation Based on LCMV Algorithm Jian WANG and Rui QIN
 2017 2nd International Conference on Software, Multimedia and Communication Engineering (SMCE 2017) ISBN: 978-1-60595-458-5 GPS Anti-jamming Performance Simulation Based on LCMV Algorithm Jian WANG and
2017 2nd International Conference on Software, Multimedia and Communication Engineering (SMCE 2017) ISBN: 978-1-60595-458-5 GPS Anti-jamming Performance Simulation Based on LCMV Algorithm Jian WANG and
Building Perceptive Robots with INTEL Euclid Development kit
 Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Active Fault Tolerant Control of Quad-Rotor Helicopter
 Professor : Dr. Youmin Zhang Sara Ghasemi Farzad Baghernezhad // Contents Quad-rotor Model Fault Detection PID Controller Sliding Mode Controller Comparison Conclusion /7 Quad-rotor Model 6 degrees of
Professor : Dr. Youmin Zhang Sara Ghasemi Farzad Baghernezhad // Contents Quad-rotor Model Fault Detection PID Controller Sliding Mode Controller Comparison Conclusion /7 Quad-rotor Model 6 degrees of
Industrial radar sensing. April 2018
 Industrial radar sensing April 2018 The world is getting smarter An ever increasing number of sensors assist, enable and keep us safe everyday Radar is a smart sensor, with advanced sensing capabilities
Industrial radar sensing April 2018 The world is getting smarter An ever increasing number of sensors assist, enable and keep us safe everyday Radar is a smart sensor, with advanced sensing capabilities
GPS System Design and Control Modeling. Chua Shyan Jin, Ronald. Assoc. Prof Gerard Leng. Aeronautical Engineering Group, NUS
 GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
A Real-Time Multi-Path Fading Channel Emulator Developed for LTE Testing
 A Real-Time Multi-Path Fading Channel Emulator Developed for LTE Testing Elliot Briggs 1, Brian Nutter 1, Dan McLane 2 SDR 11 - WInnComm Washington D.C., November 29 th December 2 nd 1: Texas Tech University,
A Real-Time Multi-Path Fading Channel Emulator Developed for LTE Testing Elliot Briggs 1, Brian Nutter 1, Dan McLane 2 SDR 11 - WInnComm Washington D.C., November 29 th December 2 nd 1: Texas Tech University,
Copyrighted Material. Contents
 Preface xiii 1 Introduction 1 1.1 Concepts 1 1.2 Spacecraft Sensors Cost 5 1.2.1 Introduction to Cost Estimating 5 1.2.2 Cost Data 7 1.2.3 Cost Estimating Methodologies 8 1.2.4 The Cost Estimating Relationship
Preface xiii 1 Introduction 1 1.1 Concepts 1 1.2 Spacecraft Sensors Cost 5 1.2.1 Introduction to Cost Estimating 5 1.2.2 Cost Data 7 1.2.3 Cost Estimating Methodologies 8 1.2.4 The Cost Estimating Relationship
Simulation Results of Alternative Methods for Formation Separation Control
 Simulation Results of Alternative Methods for Formation Separation Control Thomas Heine, Charles Bussy-Virat, Mark Moldwin, Aaron Ridley Department of Climate and Space Sciences and Engineering University
Simulation Results of Alternative Methods for Formation Separation Control Thomas Heine, Charles Bussy-Virat, Mark Moldwin, Aaron Ridley Department of Climate and Space Sciences and Engineering University
Indoor Localization and Tracking using Wi-Fi Access Points
 Indoor Localization and Tracking using Wi-Fi Access Points Dubal Omkar #1,Prof. S. S. Koul *2. Department of Information Technology,Smt. Kashibai Navale college of Eng. Pune-41, India. Abstract Location
Indoor Localization and Tracking using Wi-Fi Access Points Dubal Omkar #1,Prof. S. S. Koul *2. Department of Information Technology,Smt. Kashibai Navale college of Eng. Pune-41, India. Abstract Location
Institute for Critical Technology and Applied Science. Machine Learning for Radar State Determination. Status report 2017/11/09
 Institute for Critical Technology and Applied Science Machine Learning for Radar State Determination Status report 2017/11/09 Background/Goals Understand machine learning and its various flavors Demonstrate
Institute for Critical Technology and Applied Science Machine Learning for Radar State Determination Status report 2017/11/09 Background/Goals Understand machine learning and its various flavors Demonstrate