Easy-OBU Project. Technical Assessment and achieved results. Praha, 13 th of June 2014, Dr. Jörg Pfister
|
|
|
- Ariel Griffin
- 5 years ago
- Views:
Transcription





1 Easy-OBU Project Technical Assessment and achieved results Praha, 13 th of June 2014, Dr. Jörg Pfister
 at low cost")

2 Easy-OBU research project in a nutshell: GSA supported international project aimed at an introduction of cheap positioning solution with improved accuracy Whatarewedoing:we are developing and preparing market introduction of a new On Board Unit capable of providing more accurate location information in challenging situations (such as tunnels) at low cost Who we are: an international consortium consisting of Efcon (AT), PWP Systems (DE), Austriatech (AT), ITS&SAssociation (CZ) and ČVUT (CZ) Public support: the project is partially funded from the 7 th Frame Programme of the European Union This project is funded by the European Union and carried out in the context of the Galileo FP7 R&D programme supervised by the GSA 2
3 Validation in 3 stages Internal Validation Real life test trials have been conducted with the scientific concept car. In this test bed additional high performance equipment has been installed, to enable a detailed technical analysis. External Validation A pilot installation of Easy OBU has been has been set up with 10 vehicles in 3 countries (Austria, Czech Republic and Germany) collecting data at the Easy OBU server for a whole year. Expert Response In addition to the technical assessment special demonstration events and workshops have been organized by Easy OBU, to collect feedback from experts and users for professional applications. 3

4 Concept-Car as Test-Bed for Internal Validation 4

5 Equipment in the Concept-Car 5
 is availability of the refined positioning data only after a short delay.")
6 Easy-OBU can offer location precision improvement to applications that do not insist on real time availability of the location information Loss of GPS signal at the tunnel entrance The only limitation of Easy OBU (and a price paid for the low cost of the unit) is availability of the refined positioning data only after a short delay. GPS signal reacquisition, sensor data sent from OBU to central system Sensors in the OBU detect car motion Refined positioning data for the loss ofsignal period delivered back to the OBU Easy OBU is suitable only for applications that do not necessarily require the improved location information in real time: Shortly after leaving the tunnel, but not during the signal loss in the tunnel Examples of such applications may include: Fee collection (tolling, parking etc.) Car Sharing pay per use models Route controlling (e.g. hazardous goods transport monitoring Fleet monitoring with analytics that requires a more precise location information Ecological apps (CO 2 monitoring etc.) 6
7 Validation campaign with Concept Car Odenwald 1 st scenario with the Lohberg Tunnel, which has a length of 1080 m. Environmental conditions are rural with medium hilly terrain. Darmstadt 2 nd scenario with the City Tunnel, which has a length of 540 m. Environmental conditions are urban with 4 8 story buildings. Limburg 3 rd scenario with the Schiede Tunnel, which has a length of 245 m. Environmental conditions are a mixture of the first 2 scenarios. 7






8 Reference-Trajectory: Example Darmstadt 8

9 GNSS Results: Example Darmstadt 9



10 Easy-OBU Results: Example Darmstadt 10
11 Comparison of Results: Example Darmstadt 11
12 Histogram of the error distribution for NCF solution Percentage of position data with distance from reference Deviation from reference in meters 12

13 Comparison GNSS vs. NCF GNSS NCF at GNSS fixes The large position errors of GNSS could be all corrected! 13
14 Final Results of the Internal Validation Parameter GNSS NCF σ 6.64 m 3.38 m RMS 4.12 m 4.24 m CEP m m CEP m m Error max m m Availability 91.5 % m EGNOS Availability 91.7 % 91.7 % 14

15 External Validation with OBU PWP-2 (Odenwald) 15
 16")
16 External Validation with OBU PWP-2 (Darmstadt) 16

17 External Validation with OBU PWP-2 (Limburg) 17
18 Easy-OBU pilot 10 pilot vehicles Prototype OBUs have been distributed among all project partners early in the project Austria, Czech Republic and Germany The pilot vehicles are active in Berlin, Halle, Darmstadt, Prague, Vienna, Graz, etc. for a timer period of 1 year Easy OBU server All pilot vehicles are transmitting their data to central data Wep Application To visualize GNSS data and NCF solution from central server 18

19 Selected Bus Routes for Praha Bus Stations: Brezová Oleško Jiretice Mníšek pod Brdy Psáry Psáry, Dolní Jircany, cihelna Satalice Smíchovské nádraží Data Volume: +500 h approx. 400 trips Duration of 3 month 19

20 External Validation Scenarios Scenario 1 Link to internal Validation performance in Concept Car Scenario 2 Detection of standing phase through inertial sensor, to eliminate errors and enhance distance travelled calculation Scenario 3 Retrospective Gap Filling at Cholupice tunnel with a length of 1918 m. 20


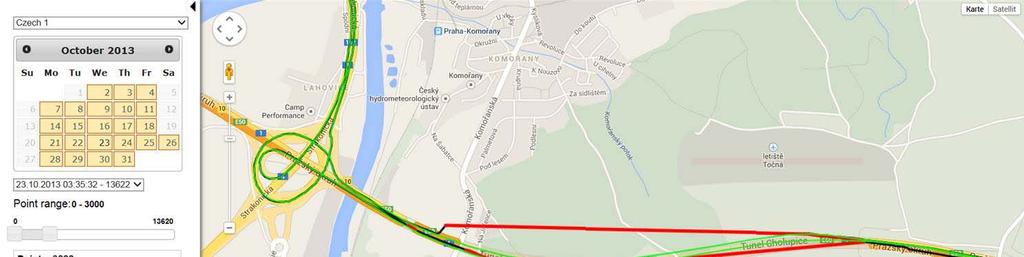





21 Web Application for Track Analysis 21
22 Summary Retrospective Gap Filling Easy OBU has the capability to reconstruct the trajectory during GNSS outage on the basis of a low cost inertial sensor head. Cut large GNSS errors GNSS fixes, which contain large errors can be identified and corrected by Easy OBU in many cases. Big pilot demonstration The FOT like pilot was valuable for technical assessment and business development. Demand is given in professional applications The received feedback from experts was encouraging for Easy OBU 22

23 EFKON AG Dietrich Keller Strasse Rabba Austria pwp systems GmbH Otto Hahn Str. 20a Bad Camberg Germany Austriatech Gesellschaft des Bundes für Technologie Politische Massnahmen GmbH Donau City Strasse Wien Austria Dr. Jörg Pfister pwp-systems GmbH info@pwp-systems.de Sdružení pro dopravní telematiku Nám. Franze Kafky Praha 1 Czech Republic Further project information: České vysoké učení technické v Praze Fakulta dopravní Zikova 1905/ Praha 6 Czech Republic 23
Easy-OBU Project. The Easy-OBU way to bridge GNSS outages
 Easy-OBU Project The Easy-OBU way to bridge GNSS outages Easy-OBU research project in a nutshell: GSA supported international project aimed at an introduction of cheap positioning solution with improved
Easy-OBU Project The Easy-OBU way to bridge GNSS outages Easy-OBU research project in a nutshell: GSA supported international project aimed at an introduction of cheap positioning solution with improved
Easy-OBU Project THE EASY WAY TO BRIDGE GNSS-OUTAGES
 Easy-OBU Project THE EASY WAY TO BRIDGE GNSS-OUTAGES Easy-OBU research project in a nutshell: GSA supported international project aimed at an introduction of cheap positioning solution with improved accuracy
Easy-OBU Project THE EASY WAY TO BRIDGE GNSS-OUTAGES Easy-OBU research project in a nutshell: GSA supported international project aimed at an introduction of cheap positioning solution with improved accuracy
TACOT Project. Trusted multi Application receiver for Trucks. Bordeaux, 4 June 2014
 TACOT Project Trusted multi Application receiver for Trucks Bordeaux, 4 June 2014 Agenda TACOT Context & Solution Technical developments Test & Validation results Conclusions GNSS ease our lives GNSS is
TACOT Project Trusted multi Application receiver for Trucks Bordeaux, 4 June 2014 Agenda TACOT Context & Solution Technical developments Test & Validation results Conclusions GNSS ease our lives GNSS is
Active Road Management Assisted by Satellite. ARMAS Phase II
 Active Road Management Assisted by Satellite ARMAS Phase II European Roundtable on Intelligent Roads Brussels, 26 January 2006 1 2 Table of Contents Overview of ARMAS System Architecture Field Trials Conclusions
Active Road Management Assisted by Satellite ARMAS Phase II European Roundtable on Intelligent Roads Brussels, 26 January 2006 1 2 Table of Contents Overview of ARMAS System Architecture Field Trials Conclusions
NAV CAR Lane-sensitive positioning and navigation for innovative ITS services AMAA, May 31 st, 2012 E. Schoitsch, E. Althammer, R.
 NAV CAR Lane-sensitive positioning and navigation for innovative ITS services AMAA, May 31 st, 2012 E. Schoitsch, E. Althammer, R. Kloibhofer (AIT), R. Spielhofer, M. Reinthaler, P. Nitsche (ÖFPZ), H.
NAV CAR Lane-sensitive positioning and navigation for innovative ITS services AMAA, May 31 st, 2012 E. Schoitsch, E. Althammer, R. Kloibhofer (AIT), R. Spielhofer, M. Reinthaler, P. Nitsche (ÖFPZ), H.
1 Introduction. Neustrelitz. Halver. Dresden. Darmstadt. Figure 1: Test measurement sites
 Results of the MultiNav Project with Focus on H-Field Antenna Measurements The MultiNav Project is supported by the German Aerospace Centre (DLR) and financed by the Federal Ministry of Education and Research
Results of the MultiNav Project with Focus on H-Field Antenna Measurements The MultiNav Project is supported by the German Aerospace Centre (DLR) and financed by the Federal Ministry of Education and Research
Lessons learned & Future of FeedMAP
 Lessons learned & Future of FeedMAP Final Workshop 6.10.2008 Trento, Italy Hans-Ulrich Otto Tele Atlas NV Lessons learned - FeedMAP in-vehicle client Positional accuracy of GPS receivers differs up to
Lessons learned & Future of FeedMAP Final Workshop 6.10.2008 Trento, Italy Hans-Ulrich Otto Tele Atlas NV Lessons learned - FeedMAP in-vehicle client Positional accuracy of GPS receivers differs up to
Tracking Quality of Low-Cost GNSS-Receivers
 251 Tracking Quality of Low-Cost GNSS-Receivers Johannes LIEBERMANN 1, Gerhard NAVRATIL 2 and Florian KRESSLER 1 1 AustriaTech, Vienna/Austria johannes.liebermann@austriatech.at 2 Vienna University of
251 Tracking Quality of Low-Cost GNSS-Receivers Johannes LIEBERMANN 1, Gerhard NAVRATIL 2 and Florian KRESSLER 1 1 AustriaTech, Vienna/Austria johannes.liebermann@austriatech.at 2 Vienna University of
IZT S1000 / IZT S1010 Testing ecall Systems
 IZT S1000 / IZT S1010 Testing ecall Systems Application Note Ready for the 2018 ecall standards Preinstalled scenarios for various testing Self-defined scenarios for special tests ecall and Adjacent Band
IZT S1000 / IZT S1010 Testing ecall Systems Application Note Ready for the 2018 ecall standards Preinstalled scenarios for various testing Self-defined scenarios for special tests ecall and Adjacent Band
ADvantis Legal Applications: Offender Tracking Example. William Roberts Nottingham Scientific Ltd
 ADvantis Legal Applications: Offender Tracking Example William Roberts Nottingham Scientific Ltd Nottingham Scientific Ltd, partner of Consortium, All rights reserved What is Electronic Monitoring of Offenders?
ADvantis Legal Applications: Offender Tracking Example William Roberts Nottingham Scientific Ltd Nottingham Scientific Ltd, partner of Consortium, All rights reserved What is Electronic Monitoring of Offenders?
European GNSS Applications in H2020
 European GNSS Applications in H2020 Countdown to H2020 12.12.2013, Brussels Carmen Aguilera European GNSS Agency Agenda European GNSS Agency EU-GNSS market potential FP7- experience and results H2020 opportunities
European GNSS Applications in H2020 Countdown to H2020 12.12.2013, Brussels Carmen Aguilera European GNSS Agency Agenda European GNSS Agency EU-GNSS market potential FP7- experience and results H2020 opportunities
Introduction to GNSS opportunities in different Market Segments. Fiammetta Diani Market Development
 Introduction to GNSS opportunities in different Market Segments Fiammetta Diani Market Development fiammetta.diani@gsa.europa.eu 3-Mar-14 European GNSS Agency 2 Congratulations! Agenda European GNSS market
Introduction to GNSS opportunities in different Market Segments Fiammetta Diani Market Development fiammetta.diani@gsa.europa.eu 3-Mar-14 European GNSS Agency 2 Congratulations! Agenda European GNSS market
April - 1 May, EGNOS Use in Road Applications. DI FAZIO Antonella Telespazio S. p. A. Via Tiburtina Rome ITALY
 2333-14 Workshop on Science Applications of GNSS in Developing Countries (11-27 April), followed by the: Seminar on Development and Use of the Ionospheric NeQuick Model (30 April-1 May) 11 April - 1 May,
2333-14 Workshop on Science Applications of GNSS in Developing Countries (11-27 April), followed by the: Seminar on Development and Use of the Ionospheric NeQuick Model (30 April-1 May) 11 April - 1 May,
Rail segment. This presentation can be interpreted only together with the oral comments accompanying it
 Rail segment This presentation can be interpreted only together with the oral comments accompanying it 2 Market sub-segments and applications Asset Management includes several functions such as fleet management,
Rail segment This presentation can be interpreted only together with the oral comments accompanying it 2 Market sub-segments and applications Asset Management includes several functions such as fleet management,
PROPART PROJECT PRESENTATION
 1 PROPART PROJECT PRESENTATION Stefan Nord RISE Measurement Science and Technology RISE/Safety and Transport Presentation Outline Project Data Consortium Objectives Partner contributions 3 Project data
1 PROPART PROJECT PRESENTATION Stefan Nord RISE Measurement Science and Technology RISE/Safety and Transport Presentation Outline Project Data Consortium Objectives Partner contributions 3 Project data
EUROPEAN GNSS APPLICATIONS IN H2020
 EUROPEAN GNSS APPLICATIONS IN H2020 Introduction to Call H2020-Galileo-2014-1 Marta Krywanis-Brzostowska Market Development European GNSS Agency www.gsa.europa.eu/r-d/h2020 Agenda R&D in the European GNSS
EUROPEAN GNSS APPLICATIONS IN H2020 Introduction to Call H2020-Galileo-2014-1 Marta Krywanis-Brzostowska Market Development European GNSS Agency www.gsa.europa.eu/r-d/h2020 Agenda R&D in the European GNSS
Measuring Galileo s Channel the Pedestrian Satellite Channel
 Satellite Navigation Systems: Policy, Commercial and Technical Interaction 1 Measuring Galileo s Channel the Pedestrian Satellite Channel A. Lehner, A. Steingass, German Aerospace Center, Münchnerstrasse
Satellite Navigation Systems: Policy, Commercial and Technical Interaction 1 Measuring Galileo s Channel the Pedestrian Satellite Channel A. Lehner, A. Steingass, German Aerospace Center, Münchnerstrasse
Research Center of Manufacturing Technology
 Czech Technical University of Prague, Faculty of Mechanical Engineering g Horská 3, 128 00 Praha 2, tel.: +420 221 990 900, fax: +420 221 990 999 http://rcmt.cvut.cz RCMT Intro The Short Introduction of
Czech Technical University of Prague, Faculty of Mechanical Engineering g Horská 3, 128 00 Praha 2, tel.: +420 221 990 900, fax: +420 221 990 999 http://rcmt.cvut.cz RCMT Intro The Short Introduction of
Characteristics of the Land Mobile Navigation Channel for Pedestrian Applications
 Characteristics of the Land Mobile Navigation Channel for Pedestrian Applications Andreas Lehner German Aerospace Center Münchnerstraße 20 D-82230 Weßling, Germany andreas.lehner@dlr.de Co-Authors: Alexander
Characteristics of the Land Mobile Navigation Channel for Pedestrian Applications Andreas Lehner German Aerospace Center Münchnerstraße 20 D-82230 Weßling, Germany andreas.lehner@dlr.de Co-Authors: Alexander
European GNSS: Galileo and EGNOS for next generation Road Charging
 European GNSS: Galileo and EGNOS for next generation Road Charging 20 th October 2014 Gian Gherardo Calini European GNSS Agency (GSA) GNSS have made a huge impact in our society it is key in Road transportation
European GNSS: Galileo and EGNOS for next generation Road Charging 20 th October 2014 Gian Gherardo Calini European GNSS Agency (GSA) GNSS have made a huge impact in our society it is key in Road transportation
BIG DATA EUROPE TRANSPORT PILOT: INTRODUCING THESSALONIKI. Josep Maria Salanova Grau CERTH-HIT
 BIG DATA EUROPE TRANSPORT PILOT: INTRODUCING THESSALONIKI Josep Maria Salanova Grau CERTH-HIT Thessaloniki on the map ~ 1.400.000 inhabitants & ~ 1.300.000 daily trips ~450.000 private cars & ~ 20.000
BIG DATA EUROPE TRANSPORT PILOT: INTRODUCING THESSALONIKI Josep Maria Salanova Grau CERTH-HIT Thessaloniki on the map ~ 1.400.000 inhabitants & ~ 1.300.000 daily trips ~450.000 private cars & ~ 20.000
JOINT PROJECT WORKSHOP on 20 May in Berlin
 NEWSLETTER Nº3, April/May 2015 CONTENT EDITORIAL 1 SOFTECO 2 MYWAY TESTING 2 VMZ 3 UPCOMING EXTERNAL EVENTS 3 UNIVERSITY OF ABERDEEN 4 PARTNER IN THE SPOTLIGHT 5 INTERVIEW WITH FRANCESC VARELA 5 TRIP PLANNER
NEWSLETTER Nº3, April/May 2015 CONTENT EDITORIAL 1 SOFTECO 2 MYWAY TESTING 2 VMZ 3 UPCOMING EXTERNAL EVENTS 3 UNIVERSITY OF ABERDEEN 4 PARTNER IN THE SPOTLIGHT 5 INTERVIEW WITH FRANCESC VARELA 5 TRIP PLANNER
Projekt Sichere Intelligente Mobilität Testfeld Deutschland. Project Safe Intelligent Mobilty Test Field Germany
 Projekt Sichere Intelligente Mobilität Testfeld Deutschland Project Safe Intelligent Mobilty Test Field Germany ETSI TC ITS Workshop 4-6 February 2009 ETSI, Sophia Antipolis, France Dr. Christian Weiß,
Projekt Sichere Intelligente Mobilität Testfeld Deutschland Project Safe Intelligent Mobilty Test Field Germany ETSI TC ITS Workshop 4-6 February 2009 ETSI, Sophia Antipolis, France Dr. Christian Weiß,
The role of EGNOS in the recapitalised DGNSS service of WSV - concept and implementation
 The role of EGNOS in the recapitalised DGNSS service of WSV - concept and implementation Tamás Horváth 1, Michael Hoppe 2 1 Alberding GmbH 2 German Federal Waterways and Shipping Administration (WSV) EGNOS
The role of EGNOS in the recapitalised DGNSS service of WSV - concept and implementation Tamás Horváth 1, Michael Hoppe 2 1 Alberding GmbH 2 German Federal Waterways and Shipping Administration (WSV) EGNOS
EUROPEAN GNSS ADOPTION OPPORTUNITIES IN TRANSPORT WITH FOCUS ON RAIL
 EUROPEAN GNSS ADOPTION OPPORTUNITIES IN TRANSPORT WITH FOCUS ON RAIL Gian Gherardo Calini European GNSS Agency III Workshop GNSS Technology Advances in a Multi-Constellation Framework 22 January 2016 This
EUROPEAN GNSS ADOPTION OPPORTUNITIES IN TRANSPORT WITH FOCUS ON RAIL Gian Gherardo Calini European GNSS Agency III Workshop GNSS Technology Advances in a Multi-Constellation Framework 22 January 2016 This
The ideal omnidirectional reference antenna should be modelled as a roofantenna at height 1.3 m for comparison. SCOPE AUTHORS
 COVER STORY Simulation and Test 26 AUTHORS Dr. Dieter Kreuer is Associate und Key Account Manager at the Qosmotec GmbH in Aachen (Germany). Mark Hakim is Managing Director at the Qosmotec GmbH in Aachen
COVER STORY Simulation and Test 26 AUTHORS Dr. Dieter Kreuer is Associate und Key Account Manager at the Qosmotec GmbH in Aachen (Germany). Mark Hakim is Managing Director at the Qosmotec GmbH in Aachen
Demonstrating Performance Levels of Positioning Technologies
 Demonstrating Performance Levels of Positioning Technologies Version 2.1 June 2009 GMV Aerospace and Defence S.A. c/ Isaac Newton 11 P.T.M. - Tres Cantos E-28760 Madrid SPAIN Tel.: +34-918 072 100 Fax:
Demonstrating Performance Levels of Positioning Technologies Version 2.1 June 2009 GMV Aerospace and Defence S.A. c/ Isaac Newton 11 P.T.M. - Tres Cantos E-28760 Madrid SPAIN Tel.: +34-918 072 100 Fax:
WHITE PAPER Saving Lives with Intelligent In-Vehicle Systems
 WHITE PAPER Saving Lives with Intelligent In-Vehicle Systems For more information, please visit: 2012 IEIMobile Approximately 1.2 million people die from traffic injuries and accidents each year. It has
WHITE PAPER Saving Lives with Intelligent In-Vehicle Systems For more information, please visit: 2012 IEIMobile Approximately 1.2 million people die from traffic injuries and accidents each year. It has
HIGHTS: towards sub-meter positioning accuracy in vehicular networks. Jérôme Härri (EURECOM) on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018
 on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018") HIGHTS: towards sub-meter positioning accuracy in vehicular networks Jérôme Härri (EURECOM) on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018 The HIGHTS Consortium 09.03.2018 H2020 HIGHTS Project 2
HIGHTS: towards sub-meter positioning accuracy in vehicular networks Jérôme Härri (EURECOM) on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018 The HIGHTS Consortium 09.03.2018 H2020 HIGHTS Project 2
Update on enhanced satellite navigation services empowering innovative solutions in Smart Mobility
 Update on enhanced satellite navigation services empowering innovative solutions in Smart Mobility 8th June 2018- Technical session 1 Latest developments in innovative ITS activities Alberto Fernández
Update on enhanced satellite navigation services empowering innovative solutions in Smart Mobility 8th June 2018- Technical session 1 Latest developments in innovative ITS activities Alberto Fernández
The EDA SUM Project. Surveillance in an Urban environment using Mobile sensors. 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012
 Surveillance in an Urban environment using Mobile sensors 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012 TABLE OF CONTENTS European Defence Agency Supported Project 1. SUM Project Description. 2. Subsystems
Surveillance in an Urban environment using Mobile sensors 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012 TABLE OF CONTENTS European Defence Agency Supported Project 1. SUM Project Description. 2. Subsystems
Twinning cases selected Deliverable D3.2 INNO-Partnering Forum
 Document ID: IPF 11-022 VINNOVA Dnr: 2009-04589 Twinning cases selected Deliverable D3.2 INNO-Partnering Forum PAGE 2 Description of the deliverable This is a formal delivery D3.2 within WP3 of the INNO-Partnering
Document ID: IPF 11-022 VINNOVA Dnr: 2009-04589 Twinning cases selected Deliverable D3.2 INNO-Partnering Forum PAGE 2 Description of the deliverable This is a formal delivery D3.2 within WP3 of the INNO-Partnering
Marikova 187/1, Prague 16200, Czech Republic Telephone(s) Mobile: Fax
 Mobile: Fax") Personal information First name/surname Address Jan ROHAC CURRICULUM VITAE Marikova 187/1, Prague 16200, Czech Republic Telephone(s) +420 224353963 Mobile: +420 777285587 E-mail Nationality Fax +420 233339929
Personal information First name/surname Address Jan ROHAC CURRICULUM VITAE Marikova 187/1, Prague 16200, Czech Republic Telephone(s) +420 224353963 Mobile: +420 777285587 E-mail Nationality Fax +420 233339929
GamECAR JULY ULY Meetings. 5 Toward the future. 5 Consortium. E Stay updated
 NEWSLETTER 1 ULY 2017 JULY The project engine has started and there is a long way to go, but we aim at consuming as less gas as possible! It will be a game, but a serious one. Playing it for real, while
NEWSLETTER 1 ULY 2017 JULY The project engine has started and there is a long way to go, but we aim at consuming as less gas as possible! It will be a game, but a serious one. Playing it for real, while
GNSS Research under FP7:
 GNSS Research under FP7: Stimulating EGNOS and Galileo adoption in multiple markets Marco Detratti-Market Innovation Officer European GNSS Agency ICL-GNSS Tampere 30 june 2011 Role of GSA in GALILEO and
GNSS Research under FP7: Stimulating EGNOS and Galileo adoption in multiple markets Marco Detratti-Market Innovation Officer European GNSS Agency ICL-GNSS Tampere 30 june 2011 Role of GSA in GALILEO and
GSA GNSS Technology Report Main highlights IPIN 2018
 GSA GNSS Technology Report Main highlights IPIN 2018 Justyna Redelkiewicz, European GNSS Agency 25 September 2018, Nantes The European GNSS Agency (GSA) is responsible for market development and operations
GSA GNSS Technology Report Main highlights IPIN 2018 Justyna Redelkiewicz, European GNSS Agency 25 September 2018, Nantes The European GNSS Agency (GSA) is responsible for market development and operations
TEM/HEEP Area V 2011 Annual Meeting
 TEM/HEEP Area V 2011 Annual Meeting Alexandr GROF Ministry of Transport Czech Republic Suceava 14-15 June 2011 Map of Europe Czech Republic Road and Motorway network Area: 78 866 km 2 Population: 10.220
TEM/HEEP Area V 2011 Annual Meeting Alexandr GROF Ministry of Transport Czech Republic Suceava 14-15 June 2011 Map of Europe Czech Republic Road and Motorway network Area: 78 866 km 2 Population: 10.220
LOCALIZATION WITH GPS UNAVAILABLE
 LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
Robust Positioning for Urban Traffic
 Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Korean scientific cooperation network with the European Research Area KORANET. Korean scientific cooperation network with the European Research Area
 KORANET Korean scientific cooperation network with the European Research Area Facts Title: KORANET (Korean scientific cooperation network with the ERA) Aim: To intensify and strengthen the S&T cooperation
KORANET Korean scientific cooperation network with the European Research Area Facts Title: KORANET (Korean scientific cooperation network with the ERA) Aim: To intensify and strengthen the S&T cooperation
GALILEO Research and Development Activities. Second Call. Area 1B. Interference Detection Mitigation and Isolation.
 GALILEO Research and Development Activities Second Call Area 1B Interference Detection Mitigation and Isolation Statement of Work Rue du Luxembourg, 3 B 1000 Brussels Tel +32 2 507 80 00 Fax +32 2 507
GALILEO Research and Development Activities Second Call Area 1B Interference Detection Mitigation and Isolation Statement of Work Rue du Luxembourg, 3 B 1000 Brussels Tel +32 2 507 80 00 Fax +32 2 507
VERIFICATION OF MATHEMATICAL MODEL FOR SMALL POWER SOURCES
 VERIFICATION OF MATHEMATICAL MODEL FOR SMALL POWER SOURCES Michal Vrána Doctoral Degree Programme (2), FEEC VUT E-mail: xvrana10@stud.feec.vutbr.cz Supervised by: Petr Mastný E-mail: mastny@feec.vutbr.cz
VERIFICATION OF MATHEMATICAL MODEL FOR SMALL POWER SOURCES Michal Vrána Doctoral Degree Programme (2), FEEC VUT E-mail: xvrana10@stud.feec.vutbr.cz Supervised by: Petr Mastný E-mail: mastny@feec.vutbr.cz
ADVANCED GNSS ALGORITHMS FOR SAFE AUTONOMOUS VEHICLES
 ION GNSS+ 2017 ADVANCED GNSS ALGORITHMS FOR SAFE AUTONOMOUS VEHICLES SEPTEMBER 29 TH, 2017 ION GNSS+ 2017, PORTLAND, OREGON, USA SESSION A5: Autonomous and Assisted Vehicle Applications Property of GMV
ION GNSS+ 2017 ADVANCED GNSS ALGORITHMS FOR SAFE AUTONOMOUS VEHICLES SEPTEMBER 29 TH, 2017 ION GNSS+ 2017, PORTLAND, OREGON, USA SESSION A5: Autonomous and Assisted Vehicle Applications Property of GMV
HAVEit Highly Automated Vehicles for Intelligent Transport
 HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
Implementation guidelines for On-Board Unit manufacturers, test solution vendors and technical centres
 EGNOS/GALILEO ECALL CONFORMANCE TESTING IN EU COMMISSION DELEGATED REGULATION 2017/79 Implementation guidelines for On-Board Unit manufacturers, test solution vendors and technical centres 2 EGNOS/GALILEO
EGNOS/GALILEO ECALL CONFORMANCE TESTING IN EU COMMISSION DELEGATED REGULATION 2017/79 Implementation guidelines for On-Board Unit manufacturers, test solution vendors and technical centres 2 EGNOS/GALILEO
Precision Estimation of GPS Devices in Static and Dynamic Modes
 Transporta elektronikas un telemātikas katedra RTU ETF Precision Estimation of GPS Devices in Static and Dynamic Modes A. Kluga, V. Beļinska, I. Mitrofanovs, J. Kluga Department of Transport Electronics
Transporta elektronikas un telemātikas katedra RTU ETF Precision Estimation of GPS Devices in Static and Dynamic Modes A. Kluga, V. Beļinska, I. Mitrofanovs, J. Kluga Department of Transport Electronics
SPAN Technology System Characteristics and Performance
 SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
Technical and Commercial Challenges of V2V and V2I networks
 Technical and Commercial Challenges of V2V and V2I networks Ravi Puvvala Founder & CEO, Savari Silicon Valley Automotive Open Source Meetup Sept 27 th 2012 Savari has developed an automotive grade connected
Technical and Commercial Challenges of V2V and V2I networks Ravi Puvvala Founder & CEO, Savari Silicon Valley Automotive Open Source Meetup Sept 27 th 2012 Savari has developed an automotive grade connected
GPS PERFORMANCE EVALUATION OF THE HUAWEI MATE 9 WITH DIFFERENT ANTENNA CONFIGURATIONS
 GPS PERFORMANCE EVALUATION OF THE HUAWEI MATE 9 WITH DIFFERENT ANTENNA CONFIGURATIONS AND P10 IN THE FIELD Gérard Lachapelle & Research Team PLAN Group, University of Calgary (http://plan.geomatics.ucalgary.ca)
GPS PERFORMANCE EVALUATION OF THE HUAWEI MATE 9 WITH DIFFERENT ANTENNA CONFIGURATIONS AND P10 IN THE FIELD Gérard Lachapelle & Research Team PLAN Group, University of Calgary (http://plan.geomatics.ucalgary.ca)
European Position Determination System (EUPOS )
") European Position Determination System (EUPOS ) Georgi MILEV, Bulgaria, Gerd ROSENTHAL, Germany and Keranka VASSILEVA, Bulgaria Key words: ABSTRACT The project EUPOS is an initiative to establish a uniform
European Position Determination System (EUPOS ) Georgi MILEV, Bulgaria, Gerd ROSENTHAL, Germany and Keranka VASSILEVA, Bulgaria Key words: ABSTRACT The project EUPOS is an initiative to establish a uniform
ROBO-SPECT ROBO-SPECT NEWS. Editorial 1 PROJECT FACTS. In This Issue
 NEWS ROBOtic System with Intelligent Vision and Control for Tunnel Structural INSPECTion and Evaluation Issue 6 September 2016 Editorial Welcome to this 's sixth newsletter. is a European 7th Framework
NEWS ROBOtic System with Intelligent Vision and Control for Tunnel Structural INSPECTion and Evaluation Issue 6 September 2016 Editorial Welcome to this 's sixth newsletter. is a European 7th Framework
Galileo and the future of SatNav: monitoring the market and technology opportunities
 Galileo and the future of SatNav: monitoring the market and technology opportunities Alberto Fernández Wyttenbach, Market Innovation Officer ESA Space Moves! 18 th September 2017, Berlin GSA governance
Galileo and the future of SatNav: monitoring the market and technology opportunities Alberto Fernández Wyttenbach, Market Innovation Officer ESA Space Moves! 18 th September 2017, Berlin GSA governance
5.9 GHz V2X Modem Performance Challenges with Vehicle Integration
 5.9 GHz V2X Modem Performance Challenges with Vehicle Integration October 15th, 2014 Background V2V DSRC Why do the research? Based on 802.11p MAC PHY ad-hoc network topology at 5.9 GHz. Effective Isotropic
5.9 GHz V2X Modem Performance Challenges with Vehicle Integration October 15th, 2014 Background V2V DSRC Why do the research? Based on 802.11p MAC PHY ad-hoc network topology at 5.9 GHz. Effective Isotropic
GNSS in Maritime and Education in Egypt
 GNSS in Maritime and Education in Egypt GNSS IN MARITIME PORTS SHIPS PORTS WATERWAYS GNSS maritime applications will help to improve: navigation. Ship operations. Traffic management. Seaport operations.
GNSS in Maritime and Education in Egypt GNSS IN MARITIME PORTS SHIPS PORTS WATERWAYS GNSS maritime applications will help to improve: navigation. Ship operations. Traffic management. Seaport operations.
Bulletin. Innovations in Sustainable Urban Mobility Plans for low-carbon urban transport January 2017 June 2021
 Bulletin Interregional cooperation project newsletter I Issue 1 InnovaSUMP project facilitates to take-up of Sustainable Urban Mobility Plans with innovations on travel behaviour, pricing and financing,
Bulletin Interregional cooperation project newsletter I Issue 1 InnovaSUMP project facilitates to take-up of Sustainable Urban Mobility Plans with innovations on travel behaviour, pricing and financing,
NEWSLETTER. The Good, the Bad and the Beautiful. Innovative Graffiti Management for Future European Cities with Graffolution.
 NEWSLETTER The Good, the Bad and the Beautiful Innovative Graffiti Management for Future European Cities with Graffolution Conference & Workshop 15 th December 2015 01 Announcement Central Saint Martins,
NEWSLETTER The Good, the Bad and the Beautiful Innovative Graffiti Management for Future European Cities with Graffolution Conference & Workshop 15 th December 2015 01 Announcement Central Saint Martins,
Challenges and Solutions for GPS Receiver Test
 Challenges and Solutions for GPS Receiver Test Presenter: Mirin Lew January 28, 2010 Agenda GPS technology concepts GPS and GNSS overview Assisted GPS (A-GPS) Basic tests required for GPS receiver verification
Challenges and Solutions for GPS Receiver Test Presenter: Mirin Lew January 28, 2010 Agenda GPS technology concepts GPS and GNSS overview Assisted GPS (A-GPS) Basic tests required for GPS receiver verification
ProMark 3 RTK. White Paper
 ProMark 3 RTK White Paper Table of Contents 1. Introduction... 1 2. ProMark3 RTK Operational Environment... 2 3. BLADE TM : A Unique Magellan Technology for Quicker Convergence... 3 4. ProMark3 RTK Fixed
ProMark 3 RTK White Paper Table of Contents 1. Introduction... 1 2. ProMark3 RTK Operational Environment... 2 3. BLADE TM : A Unique Magellan Technology for Quicker Convergence... 3 4. ProMark3 RTK Fixed
Qosmotec. Software Solutions GmbH. Technical Overview. QPER C2X - Car-to-X Signal Strength Emulator and HiL Test Bench. Page 1
 Qosmotec Software Solutions GmbH Technical Overview QPER C2X - Page 1 TABLE OF CONTENTS 0 DOCUMENT CONTROL...3 0.1 Imprint...3 0.2 Document Description...3 1 SYSTEM DESCRIPTION...4 1.1 General Concept...4
Qosmotec Software Solutions GmbH Technical Overview QPER C2X - Page 1 TABLE OF CONTENTS 0 DOCUMENT CONTROL...3 0.1 Imprint...3 0.2 Document Description...3 1 SYSTEM DESCRIPTION...4 1.1 General Concept...4
E-CALL. Traffic information systems L E C T U R E. Zuzana Bělinová. TELEMATIC SYSTEMS AND THEIR DESIGN part Systems Lecture 9
 Zuzana Bělinová L E C T U R E 9 E-CALL Traffic information systems Lecture 6 - overview E-call Traffic information systems RDS-TMC TPEG Zuzana Bělinová E-CALL what it is Automatic emergency call from vehicles
Zuzana Bělinová L E C T U R E 9 E-CALL Traffic information systems Lecture 6 - overview E-call Traffic information systems RDS-TMC TPEG Zuzana Bělinová E-CALL what it is Automatic emergency call from vehicles
Labs Network Industrie 4.0 e.v. Konkrete I4.0-Projekte mit KMUs
 Labs Network Industrie 4.0 e.v. Konkrete I4.0-Projekte mit KMUs Dr. Dominik Rohrmus July 2017 Plattform Industrie 4.0 in Germany The digital transformation needs a broad-based foundation 2 Plattform Industrie
Labs Network Industrie 4.0 e.v. Konkrete I4.0-Projekte mit KMUs Dr. Dominik Rohrmus July 2017 Plattform Industrie 4.0 in Germany The digital transformation needs a broad-based foundation 2 Plattform Industrie
Challenges and Methods for Integrity Assurance in Future GNSS
 Challenges and Methods for Integrity Assurance in Future GNSS Igor Mozharov Division Head, Information and Analytical Center for PNT, Central Research Institute for Machine Building, Roscosmos igor.mozharov@mcc.rsa.ru
Challenges and Methods for Integrity Assurance in Future GNSS Igor Mozharov Division Head, Information and Analytical Center for PNT, Central Research Institute for Machine Building, Roscosmos igor.mozharov@mcc.rsa.ru
A SYSTEM FOR VEHICLE DATA PROCESSING TO DETECT SPATIOTEMPORAL CONGESTED PATTERNS: THE SIMTD-APPROACH
 19th ITS World Congress, Vienna, Austria, 22/26 October 2012 EU-00062 A SYSTEM FOR VEHICLE DATA PROCESSING TO DETECT SPATIOTEMPORAL CONGESTED PATTERNS: THE SIMTD-APPROACH M. Koller, A. Elster#, H. Rehborn*,
19th ITS World Congress, Vienna, Austria, 22/26 October 2012 EU-00062 A SYSTEM FOR VEHICLE DATA PROCESSING TO DETECT SPATIOTEMPORAL CONGESTED PATTERNS: THE SIMTD-APPROACH M. Koller, A. Elster#, H. Rehborn*,
Evaluation of Actuated Right Turn Signal Control Using the ITS Radio Communication System
 19th ITS World Congress, Vienna, Austria, 22/26 October 2012 AP-00201 Evaluation of Actuated Right Turn Signal Control Using the ITS Radio Communication System Osamu Hattori *, Masafumi Kobayashi Sumitomo
19th ITS World Congress, Vienna, Austria, 22/26 October 2012 AP-00201 Evaluation of Actuated Right Turn Signal Control Using the ITS Radio Communication System Osamu Hattori *, Masafumi Kobayashi Sumitomo
Intelligent Surveillance and Management Functions for Airfield Applications Based on Low Cost Magnetic Field Detectors. Publishable Executive Summary
 Intelligent Surveillance and Management Functions for Airfield Applications Based on Low Cost Magnetic Field Detectors Publishable Executive Summary Project Co-ordinator Prof. Dr. Uwe Hartmann Saarland
Intelligent Surveillance and Management Functions for Airfield Applications Based on Low Cost Magnetic Field Detectors Publishable Executive Summary Project Co-ordinator Prof. Dr. Uwe Hartmann Saarland
TR Associates Ltd. Tunde Kallai
 Interna'onal Brokerage Event Brussels, 26-27/10/2017 TR Associates Ltd. Tunde Kallai tkallai60@gmail.com Descrip(on of the Organiza(on Year of establishment: 2008 in Malta, St Julians TR Associates Ltd
Interna'onal Brokerage Event Brussels, 26-27/10/2017 TR Associates Ltd. Tunde Kallai tkallai60@gmail.com Descrip(on of the Organiza(on Year of establishment: 2008 in Malta, St Julians TR Associates Ltd
INFRARED-THE REAL FUTURE PROOF ITS COMMUNICATION MEDIUM
 INFRARED-THE REAL FUTURE PROOF ITS COMMUNICATION MEDIUM Max Staudinger Director Marketing/Sales Efkon Austria, Andritzer Reichsstrasse 66 8045 Graz, Austria 1. The Basic Achievement Efkon electronics has
INFRARED-THE REAL FUTURE PROOF ITS COMMUNICATION MEDIUM Max Staudinger Director Marketing/Sales Efkon Austria, Andritzer Reichsstrasse 66 8045 Graz, Austria 1. The Basic Achievement Efkon electronics has
Inertially Aided RTK Performance Evaluation
 Inertially Aided RTK Performance Evaluation Bruno M. Scherzinger, Applanix Corporation, Richmond Hill, Ontario, Canada BIOGRAPHY Dr. Bruno M. Scherzinger obtained the B.Eng. degree from McGill University
Inertially Aided RTK Performance Evaluation Bruno M. Scherzinger, Applanix Corporation, Richmond Hill, Ontario, Canada BIOGRAPHY Dr. Bruno M. Scherzinger obtained the B.Eng. degree from McGill University
Drive-by DTM. and Navigation at our university in cooperation
 Drive-by DTM GPS and GSM/GPRS Power Cost-Effective Terrain Modeling A data teletransmission system for quick and efficient creation of digital terrain models (DTMs) forms the backbone of experimental work
Drive-by DTM GPS and GSM/GPRS Power Cost-Effective Terrain Modeling A data teletransmission system for quick and efficient creation of digital terrain models (DTMs) forms the backbone of experimental work
ENVIROS, s.r.o. Madrid, 1 st of December 2015
 Implementation of Adapted Energy Management Standard WP 6 EMSPI Michael ten Donkelaar ENVIROS, s.r.o. Madrid, 1 st of December 2015 Agenda Development of programme for the 1-day consultancy training workshop
Implementation of Adapted Energy Management Standard WP 6 EMSPI Michael ten Donkelaar ENVIROS, s.r.o. Madrid, 1 st of December 2015 Agenda Development of programme for the 1-day consultancy training workshop
V2X-Locate Positioning System Whitepaper
 V2X-Locate Positioning System Whitepaper November 8, 2017 www.cohdawireless.com 1 Introduction The most important piece of information any autonomous system must know is its position in the world. This
V2X-Locate Positioning System Whitepaper November 8, 2017 www.cohdawireless.com 1 Introduction The most important piece of information any autonomous system must know is its position in the world. This
Big data in Thessaloniki
 Big data in Thessaloniki Josep Maria Salanova Grau Center for Research and Technology Hellas Hellenic Institute of Transport Email: jose@certh.gr - emit@certh.gr Web: www.hit.certh.gr Big data in Thessaloniki
Big data in Thessaloniki Josep Maria Salanova Grau Center for Research and Technology Hellas Hellenic Institute of Transport Email: jose@certh.gr - emit@certh.gr Web: www.hit.certh.gr Big data in Thessaloniki
METIS & MEDIGATE Conference Tunis - Tunisia
 MEdiTerranean Introduction of GNSS (Global Satellite Navigation System) Services METIS & MEDIGATE Conference Tunis - Tunisia Telespazio S.p.A. Antonella Di Fazio email: antonella.difazio@telespazio.com
MEdiTerranean Introduction of GNSS (Global Satellite Navigation System) Services METIS & MEDIGATE Conference Tunis - Tunisia Telespazio S.p.A. Antonella Di Fazio email: antonella.difazio@telespazio.com
Accuracy Performance Test Methodology for Satellite Locators on Board of Trains Developments and results from the EU Project APOLO
 ID No: 459 Accuracy Performance Test Methodology for Satellite Locators on Board of Trains Developments and results from the EU Project APOLO Author: Dipl. Ing. G.Barbu, Project Manager European Rail Research
ID No: 459 Accuracy Performance Test Methodology for Satellite Locators on Board of Trains Developments and results from the EU Project APOLO Author: Dipl. Ing. G.Barbu, Project Manager European Rail Research
The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings. 20 th October 2016
 The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings 20 th October 2016 An academic department within the science faculty Established in 1980 by Professor Lord Bhattacharyya as Warwick Manufacturing
The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings 20 th October 2016 An academic department within the science faculty Established in 1980 by Professor Lord Bhattacharyya as Warwick Manufacturing
Small, Fine and Precise
 Small, Fine and Precise Convenient, safe and reliable: Everyday life without a car is unimaginable. But what would happen if we had to get to an appointment quickly and the vehicle lets us down? What if
Small, Fine and Precise Convenient, safe and reliable: Everyday life without a car is unimaginable. But what would happen if we had to get to an appointment quickly and the vehicle lets us down? What if
Galileo Aktueller Stand der Entwicklung
 Galileo Aktueller Stand der Entwicklung Is there a positive perspective for Galileo? Dr. Philipp Berglez TeleConsult Austria GmbH GSV-Forum Galileo das europäische Satellitennavigationssystem eine neue
Galileo Aktueller Stand der Entwicklung Is there a positive perspective for Galileo? Dr. Philipp Berglez TeleConsult Austria GmbH GSV-Forum Galileo das europäische Satellitennavigationssystem eine neue
The experimental evaluation of the EGNOS safety-of-life services for railway signalling
 Computers in Railways XII 735 The experimental evaluation of the EGNOS safety-of-life services for railway signalling A. Filip, L. Bažant & H. Mocek Railway Infrastructure Administration, LIS, Pardubice,
Computers in Railways XII 735 The experimental evaluation of the EGNOS safety-of-life services for railway signalling A. Filip, L. Bažant & H. Mocek Railway Infrastructure Administration, LIS, Pardubice,
Partners. Mobility Schemes Ensuring ACCESSibility of Public Transport for ALL Users. all.eu
 http://www.access-to-all.eu Issue: Nov. 2010 Partners CERTH/HIT Center of Research and Technology Hellas/Hellenic Institute of Transport Scientific Coordinator Greece ERT Europe Research Transport Management
http://www.access-to-all.eu Issue: Nov. 2010 Partners CERTH/HIT Center of Research and Technology Hellas/Hellenic Institute of Transport Scientific Coordinator Greece ERT Europe Research Transport Management
Transport poverty meets the Digital Divide: accessibility and connectivity in rural communities
 Transport poverty meets the Digital Divide: accessibility and connectivity in rural communities John D Nelson Centre for Transport Research and RCUK dot.rural Digital Economy Research Hub University of
Transport poverty meets the Digital Divide: accessibility and connectivity in rural communities John D Nelson Centre for Transport Research and RCUK dot.rural Digital Economy Research Hub University of
Active Road Management Assisted by Satellite - ARMAS Phase II
 Active Road Management Assisted by Satellite - ARMAS Phase II PAULO GOMES, ARMAS PHASE II TECHNICAL COORDINATOR, SKYSOFT PORTUGAL JOÃO CANÁRIO, ARMAS PHASE II PROJECT MANAGER, SKYSOFT PORTUGAL PAULO ANDRÉ,
Active Road Management Assisted by Satellite - ARMAS Phase II PAULO GOMES, ARMAS PHASE II TECHNICAL COORDINATOR, SKYSOFT PORTUGAL JOÃO CANÁRIO, ARMAS PHASE II PROJECT MANAGER, SKYSOFT PORTUGAL PAULO ANDRÉ,
2 nd Mileage-Based User Fee Symposium. Transition Issues and Research Needs. Paul Sorensen, RAND Corporation
 2 nd Mileage-Based User Fee Symposium Transition Issues and Research Needs Paul Sorensen, RAND Corporation April 20-21, 2010 Observations Are Based on Two Recent AASHTO-funded NCHRP Studies NCHRP 20-24(69)
2 nd Mileage-Based User Fee Symposium Transition Issues and Research Needs Paul Sorensen, RAND Corporation April 20-21, 2010 Observations Are Based on Two Recent AASHTO-funded NCHRP Studies NCHRP 20-24(69)
Measuring GALILEOs multipath channel
 Measuring GALILEOs multipath channel Alexander Steingass German Aerospace Center Münchnerstraße 20 D-82230 Weßling, Germany alexander.steingass@dlr.de Co-Authors: Andreas Lehner, German Aerospace Center,
Measuring GALILEOs multipath channel Alexander Steingass German Aerospace Center Münchnerstraße 20 D-82230 Weßling, Germany alexander.steingass@dlr.de Co-Authors: Andreas Lehner, German Aerospace Center,
Test Solutions for Simulating Realistic GNSS Scenarios
 Test Solutions for Simulating Realistic GNSS Scenarios Author Markus Irsigler, Rohde & Schwarz GmbH & Co. KG Biography Markus Irsigler received his diploma in Geodesy and Geomatics from the University
Test Solutions for Simulating Realistic GNSS Scenarios Author Markus Irsigler, Rohde & Schwarz GmbH & Co. KG Biography Markus Irsigler received his diploma in Geodesy and Geomatics from the University
Satellite navigation applications: opportunities from the European GNSS. Fiammetta Diani Deputy Head of Market Development European GNSS Agency
 Satellite navigation applications: opportunities from the European GNSS Fiammetta Diani Deputy Head of Market Development European GNSS Agency FP7 success story in Lithuania COSUDEC Coastal Surveying of
Satellite navigation applications: opportunities from the European GNSS Fiammetta Diani Deputy Head of Market Development European GNSS Agency FP7 success story in Lithuania COSUDEC Coastal Surveying of
The Influence of Multipath on the Positioning Error
 The Influence of Multipath on the Positioning Error Andreas Lehner German Aerospace Center Münchnerstraße 20 D-82230 Weßling, Germany andreas.lehner@dlr.de Co-Authors: Alexander Steingaß, German Aerospace
The Influence of Multipath on the Positioning Error Andreas Lehner German Aerospace Center Münchnerstraße 20 D-82230 Weßling, Germany andreas.lehner@dlr.de Co-Authors: Alexander Steingaß, German Aerospace
Channel Models. Spring 2017 ELE 492 FUNDAMENTALS OF WIRELESS COMMUNICATIONS 1
 Channel Models Spring 2017 ELE 492 FUNDAMENTALS OF WIRELESS COMMUNICATIONS 1 Narrowband Channel Models Statistical Approach: Impulse response modeling: A narrowband channel can be represented by an impulse
Channel Models Spring 2017 ELE 492 FUNDAMENTALS OF WIRELESS COMMUNICATIONS 1 Narrowband Channel Models Statistical Approach: Impulse response modeling: A narrowband channel can be represented by an impulse
ERDS Simulator Emergency Response Driving Simulator
 ERDS Simulator Emergency Response Driving Simulator Safe in every situation. Rosenbauer - ERDS Emergency Response Driving Simulator Reduce your risk - To a minimum. Train emergency journeys with the ERDS
ERDS Simulator Emergency Response Driving Simulator Safe in every situation. Rosenbauer - ERDS Emergency Response Driving Simulator Reduce your risk - To a minimum. Train emergency journeys with the ERDS
Dynamic properties of GNSS/ INS based train position locator for signalling applications
 Dynamic properties of GNSS/ INS based train position locator for signalling applications A. Filip, L. Baiant, H. Mocek, J. Taufer & V. Maixner Czech Railways, DDC SZT Laboratory of Intelligent Systems,
Dynamic properties of GNSS/ INS based train position locator for signalling applications A. Filip, L. Baiant, H. Mocek, J. Taufer & V. Maixner Czech Railways, DDC SZT Laboratory of Intelligent Systems,
Galileo Programme Update
 Galileo Programme Update Pieter De Smet, European Commission ICTP Conference, Prague, 10 November, 2014 1 December 2014 The European GNSS Programmes 2 Secure Foundations ü A stable 7 years perspective
Galileo Programme Update Pieter De Smet, European Commission ICTP Conference, Prague, 10 November, 2014 1 December 2014 The European GNSS Programmes 2 Secure Foundations ü A stable 7 years perspective
SENSORS SESSION. Operational GNSS Integrity. By Arne Rinnan, Nina Gundersen, Marit E. Sigmond, Jan K. Nilsen
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE 11-12 October, 2011 SENSORS SESSION By Arne Rinnan, Nina Gundersen, Marit E. Sigmond, Jan K. Nilsen Kongsberg Seatex AS Trondheim,
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE 11-12 October, 2011 SENSORS SESSION By Arne Rinnan, Nina Gundersen, Marit E. Sigmond, Jan K. Nilsen Kongsberg Seatex AS Trondheim,
CEPT Workshop on Spectrum for Drones / UAS. Detection of Drones - Research Project AMBOS - Copenhagen, 29 June 2018
 Abwehr von unbemannten Flugobjekten für Behörden und Organisationen mit Sicherheitsaufgaben CEPT Workshop on Spectrum for Drones / UAS Detection of Drones - Research Project AMBOS - Copenhagen, 29 June
Abwehr von unbemannten Flugobjekten für Behörden und Organisationen mit Sicherheitsaufgaben CEPT Workshop on Spectrum for Drones / UAS Detection of Drones - Research Project AMBOS - Copenhagen, 29 June
Digital signal processing for satellitebased
 Digital signal processing for satellitebased positioning Department of Communications Engineering (DCE), Tampere University of Technology Simona Lohan, Dr. Tech, Docent (Adjunct Professor) E-mail:elena-simona.lohan@tut.fi
Digital signal processing for satellitebased positioning Department of Communications Engineering (DCE), Tampere University of Technology Simona Lohan, Dr. Tech, Docent (Adjunct Professor) E-mail:elena-simona.lohan@tut.fi
Common Features and National Differences - preliminary findings -
 Common Features and National Differences - preliminary findings - Knud Böhle and Systems Analysis Research Centre Karlsruhe Karlsruhe, Germany Outline 1. Some indicators, used in the general section of
Common Features and National Differences - preliminary findings - Knud Böhle and Systems Analysis Research Centre Karlsruhe Karlsruhe, Germany Outline 1. Some indicators, used in the general section of
EMYNOS final demonstration
 EMYNOS final demonstration January 31st 2018 Bucharest, Romania Next Gen platform Combine voice, text, and video, thus constituting a powerful tool for coordinating communication among citizens, call centers
EMYNOS final demonstration January 31st 2018 Bucharest, Romania Next Gen platform Combine voice, text, and video, thus constituting a powerful tool for coordinating communication among citizens, call centers
Dependability of GNSS on the UK Railways
 Dependability of GNSS on the UK Railways M. Thomas 1, D. Lowe 2, M. Dumville 2, W. Roberts 2, P. Cross 3, G. Roberts 4, T. Nunn 5 1 Rail Safety and Standards Board, London, UK, 2 Nottingham Scientific
Dependability of GNSS on the UK Railways M. Thomas 1, D. Lowe 2, M. Dumville 2, W. Roberts 2, P. Cross 3, G. Roberts 4, T. Nunn 5 1 Rail Safety and Standards Board, London, UK, 2 Nottingham Scientific
GPS-Galileo Time Offset (GGTO) Galileo Implementation Status and Performance. Jörg Hahn
 Galileo Implementation Status and Performance. Jörg Hahn") GPS-Galileo Time Offset (GGTO) Galileo Implementation Status and Performance Jörg Hahn GGTO Galileo Summary Galileo-GPS Timing Offset (GGTO) as a System contribution to achieve tighter interoperability
GPS-Galileo Time Offset (GGTO) Galileo Implementation Status and Performance Jörg Hahn GGTO Galileo Summary Galileo-GPS Timing Offset (GGTO) as a System contribution to achieve tighter interoperability
GNSS-Based Auto-Guidance Accuracy Testing
 AETC (Louisville, Kentucky) February, GNSS-Based Auto-Guidance Accuracy Testing Viacheslav I. Adamchuk Biological Systems Engineering University of Nebraska-Lincoln Background Auto-guidance (auto-steering)
AETC (Louisville, Kentucky) February, GNSS-Based Auto-Guidance Accuracy Testing Viacheslav I. Adamchuk Biological Systems Engineering University of Nebraska-Lincoln Background Auto-guidance (auto-steering)
ITS Radiocommunications in Japan Progress report and future directions
 ITS Radiocommunications in Japan Progress report and future directions 6 March 2018 Berlin, Germany Tomoaki Ishii Assistant Director, New-Generation Mobile Communications Office, Radio Dept., Telecommunications
ITS Radiocommunications in Japan Progress report and future directions 6 March 2018 Berlin, Germany Tomoaki Ishii Assistant Director, New-Generation Mobile Communications Office, Radio Dept., Telecommunications
Some Signal Processing Techniques for Wireless Cooperative Localization and Tracking
 Some Signal Processing Techniques for Wireless Cooperative Localization and Tracking Hadi Noureddine CominLabs UEB/Supélec Rennes SCEE Supélec seminar February 20, 2014 Acknowledgments This work was performed
Some Signal Processing Techniques for Wireless Cooperative Localization and Tracking Hadi Noureddine CominLabs UEB/Supélec Rennes SCEE Supélec seminar February 20, 2014 Acknowledgments This work was performed