Chapter 2 Infinite Impulse Response (IIR) Filter
|
|
|
- Blanche Bond
- 5 years ago
- Views:
Transcription
1 Chapter 2 Infinite Impulse Response (IIR) Filter 2.1 Impulse-Invariant Mapping The generalized transfer function of the system can be represented in Laplace transformation as given below: H a (s) = k=n k=1 A k (S p k ). (2.1) The corresponding impulse response of the causal system is obtained as h a (t) = k=n k=1 A k e jwt u(t), (2.2) where u(t) is the unit step function. Sampling the impulse response h a (t) = h(t), we get the discrete version of the system as given below: h a (nt s ) = h(n) = k=n k=1 A k e jwnt s, (2.3) for n = Taking z-transformation of the sequence h(n), we get the following (Fig. 2.1): H(z) = = n= n=0 n= n=0 h(n)z n k=n A k e jwnt s k=1 Springer International Publishing AG 2018 E.S. Gopi, Multi-Disciplinary Digital Signal Processing, DOI / _2 43
2 44 2 Infinite Impulse Response (IIR) filter Fig. 2.1 Illustration on the computation of the area under the curve using Trapezoidal rule = = = k=n k=1 k=n k=1 k=n k=1 = n= A k n=0 A k n= e jwnt s z n (e jwt s z 1 ) n n=0 A k (1 e jwt s z 1 ) 1 k=n k=1 A k 1 e jwt s z 1. A By substituting k (S p k ) with A k, we convert the continuous domain to discrete 1 e jwts z 1 domain, i.e., we obtain the discrete sequence h(n) from the continuous impulse response h(t). This the impulse-invariant method of mapping S to Z domain. 2.2 Bilinear Transformation Mapping The sampling frequency F s = 1 T s used in (2.3) needs to be fixed as greater than twice the maximum frequency content of h(t) (Sampling theorem), which is not usually known. Suppose if F s is chosen not satisfying the sampling theorem associated with the impulse response, overlapping in the spectrum occurs. In particular, if the spectrum of h(t) is high-pass nature, it suffers a lot. This is circumvented using the technique known as bilinear transformation as described below. The area under the curve of the impulse response x a (t) = dh(t) for (n 1)T dt s t nt s is computed (refer Fig. 2.1) as
3 2.2 Bilinear Transformation Mapping 45 nts (n t)t s dh(t) dt = (h((n 1)T s ) h(nt s )). (2.4) dt This is computed using the trapezoidal approximation (refer Fig. 2.1) asfollows: T s 2 (x nt s + x (n 1)Ts ). (2.5) Taking Laplace transformation on both sides of x(t) = dh(t), we get X (s) = sh(s). dt Taking z-transformation of (2.4) and (2.5), we get the following: H(z)(1 z 1 ) = T s 2 X (z)(1 + z 1 ). Thus equating the ratio X (s) X (z) with, we get the following: H(s) H(z) s = 2 1 z 1. (2.6) T s 1 + z 1 Substituting s = jw and z = e jw d in (2.6), we get w = 2 T s tan(w d /2), where w is the analog frequency and w d is the digital frequency. This method of mapping s-domain to z-domain is called Bilinear transformation. Even when w ts to, w d ts to the value π.asπ corresponds to the maximum frequency content of the signal after sampling, maximum frequency of the content of the signal is bounded to. This is equivalent to obtaining the scaled down version of the spectrum of h(t) such that maximum frequency is bounded to F s 2, irrespective of actual value of the F s. Thus overlapping of spectrum never occur. Hence, this is suitable for high-pass filtering. But the drawback is the shrinkage of the spectrum Frequency Pre-warping The relationship between the digital frequency w d and the analog frequency w (rad/sec) is linear (w d = wt s ) in the case of impulse-invariant mapping. But if T s is not properly chosen to obtain the discrete version of the analog filter, overlapping occurs. This is circumvented using Bilinear transformation given as w = 2 Ts tan( w d 2 ). This guarantees that even when the maximum analog frequency content of the impulse response is, the corresponding digital frequency is bounded to π.butthe relationship is nonlinear (refer Fig 2.2). Suppose if would like to design the low-pass filter with cutoff frequency w c in rad/sec (equivalently w c F s in digital domain), we get the digital filter with cutoff frequency 2 wt s 2 tan 1 (w). This is undesired property of Bilinear transformation. This is circumvented as follows. Suppose we need the low-pass filter with cutoff frequency w c in rad/sec (equivalently w c F s in digital domain), we obtain the pre-warped frequency pw c = 2 Ts tan ( w ct s 2 ). The plot between w c and pw c is given in the bandpass filter as shown in Fig. 2.3.
4 46 2 Infinite Impulse Response (IIR) filter Fig. 2.2 Relationship between digital and analog frequency using bilinear transformation Fig. 2.3 Relationship between the actual analog frequency and the prewarped analog frequency (refer (2.2.1)) Design the analog filter with the prewarped frequency pw c in rad/sec. If the mapping is done from s to z using bilinear transformation for the designed analog filter, we get the digital filter with the desired cutoff frequency w c F s. This is known as frequency pre-warping.
5 2.2 Bilinear Transformation Mapping Design of Digital IIR Filter using Butterworth Analog Filter and Impulse-Invariant Transformation The generalized transfer function of the IIR analog low-pass filter is computed as follows: H a (s) = π k= N 2 k=1 B k w 2 c S 2 + b k w c s + c k w 2 c (2.7) for N as even. H a (s) = π N 1 k= 2 k=1 B k w 2 c S 2 + b k w c s + c k w 2 c B 0 w c s + c 0 w c (2.8) for N as odd. The magnitude response of the Butterworth filter is given as follows: A H( jw) =. (2.9) [1 + ( w w c ) 2N ] 1 2 Refer Fig.2.4 for the typical magnitude response plot for various orders of the Butterworth filter with w c = 1 rad/sec and A = 1. Given the magnitude response of the Butterworth filter at w = 0 (say A), magnitude of the transfer function is lesser than m at the stop band frequency (ws in rad/sec), and the order of the filter N is computed as follows: N = A2 m 2 1 2log( ws wc ), where wc is the cutoff of the Butterworth filter whose magnitude response is A 2 at wc. For the typical value of N as even, the values for b k are computed as b k = sin( (2k 1)π ), c 2N k = 1, B k = A 2 N N for k = 1 2. For the typical value of N as odd, the values for b k are computed as b k = sin( (2k 1)π ), c 2N k = 1, B k = A 2 N 1 N for k = 1 and B 2 0 = 1 and c 0 = 1. Mapping from the s-domain to z-domain (H(S) to H(z)) is obtained by substituting the term of the form A k (S p k ) of H A a(s) with k. This is done by 1 e jwts z 1 B representing k wc 2 S 2 +b k w c s+c k as the summation of two partial fractions for every k. wc 2 Thus the digital Butterworth impulse-invariant filter H(z) is obtained Design of Digital IIR Filter using Butterworth Analog Filter and Bilinear Transformation The magnitude response of the Butterworth filter is given as follows (2.9):
6 48 2 Infinite Impulse Response (IIR) filter Fig. 2.4 Magnitude response plot for various orders of the Butterworth filter with w c = 1 rad/sec and A = 1 Given the magnitude response of the Butterworth filter at w = 0 (say A), magnitude of the transfer function is lesser than m at the stop band frequency (ws in rad/sec), cutoff frequency (wc in rad/sec), and sampling frequency Fs, and the order of the filter N is computed as follows. Obtain the prewarped frequency corresponding to ws and wc as pws and pwc as follows: wcd = w c Fs ; wsd = w s Fs ; pwc = 2 Ts tan(wcd 2 ); pws = 2 Ts tan(wsd 2 ); A2 m 2 1 2log( pws pwc ). The order of the filter N is computed as N = For the typical value of N as even, the values for b k are computed as b k = sin( (2k 1)π ), c 2N k = 1, B k = A 2 N N for k = 1 2. For the typical value of N as odd, the values for b k are computed as b k = sin( (2k 1)π ), c 2N k = 1, B k = A 2 N 1 N for k = 1 and B 2 0 = 1 and c 0 = 1. Thus the analog filter H a (s) is obtained (refer (1.7) and (1.8)). Mapping from the s-domain to z-domain (H(S) to H(z)) is obtained by substituting s = 2 1 z 1. Ts 1+z 1 Thus the bilinear transformation-based Butterworth filter H(z) is obtained.
7 2.2 Bilinear Transformation Mapping Design of Digital IIR Filter Using Chebyshev Analog Filter and Impulse-Invariant Transformation Butterworth filter has the smooth magnitude response, but the cutoff is not usually very sharp. This is circumvented using the chebyfilter analog filter. The magnitude response of the Chebyshev filter is given as follows: A H( jw) =, (2.10) [1 + ε 2 C N ( w w c )] 1 2 where C N (x) = cos(ncos 1 x) for x 1 and C N (x) = cosh(ncosh 1 x) for x > 1 (refer Fig. 2.5 for the typical magnitude response plot for various orders (red color for N odd and blue color for N as even) is of the Chebyshev filter with w c = 2 rad/sec, A = 1 and ε = 0.2. Also, Fig. 2.6 shows the case when ε = 2. Given the ripple width R, maximum amplitude of the transfer function A, pass band cutoff frequency w p = w c (magnitude at w c is given as A 1+ε 2 A 1+ε 2 ) ), where (A ) is the ripple width R and the magnitude of the transfer function at the stop band frequency (ws in rad/sec) is lesser than m, the order of the filter N is computed as follows: ε = R A R ; r = w s w p ; C = 1 m 2 m 2 ε 2 ; N = acosh(c) acosh(r). For the typical value of N, the values for b k are computed as b k = 2Y N sin( (2k 1)π ), 2N c k = (Y N ) 2 + cos 2 ( (2k 1)π ), where Y 2N N = 1 2 ([ 1 2 ε + 1 ε ] 1 N +[ 1 2 ε 1 ε ] 1 N ) and B k is A chosen by choosing the required amplitude (either A for N = odd or for (1+ε 2 ) 2 1 N = even at w = 0). Mapping from the s-domain to z-domain (H(S) to H(z)) is obtained by substituting the term of the form A k (S p k ) of H A a(s) with k. This is done by 1 e jwts z 1 B representing k wc 2 S 2 +b k w c s+c k as the summation of two partial fractions for every k. wc 2 Thus the digital Butterworth impulse-invariant filter H(z) is obtained Design of Digital IIR Filter Using Chebyshev Analog Filter and Bilinear Transformation Butterworth filter has the smooth magnitude response, but the cutoff is not usually very sharp. This is circumvented using the chebyshev analog filter. The magnitude response of the Chebyshev filter is given as (2.10).
 is of the Chebyshev filter with w c = w p = 2 rad/sec")
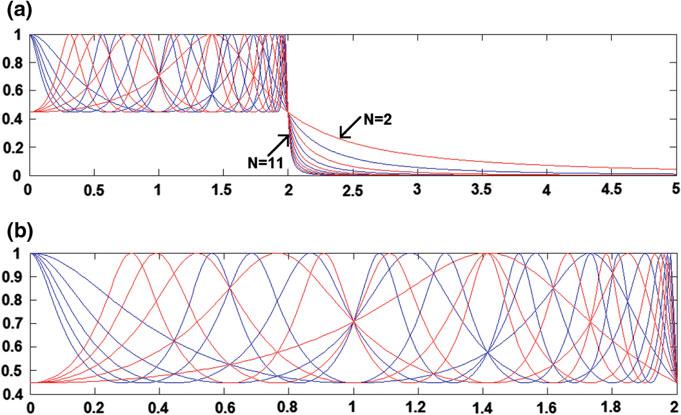
8 50 2 Infinite Impulse Response (IIR) filter Fig. 2.5 Magnitude response plot for various orders (red color for N odd and blue color for N as even) is of the Chebyshev filter with w c = w p = 2 rad/sec (refer Sects and 2.2.5), A = 1and ε = 0.2 Fig. 2.6 Magnitude response plot for various orders (red color for N odd and blue color for N as even) is of the Chebyshev filter with w c = w p = 2 rad/sec, A = 1andε = 2
9 2.2 Bilinear Transformation Mapping 51 Given the ripple width R, maximum amplitude of the transfer function A, pass band A cutoff frequency w p = w c (magnitude at w c is given as, where (A ) 1+ε 2 A 1+ε 2 ) is the ripple width R and the magnitude of the transfer function at the stop band frequency (ws in rad/sec) is lesser than m), the order of the filter N is computed as follows. Obtain the prewarped frequency corresponding to ws and wc as pws and pwc as follows: ε = wcd = w c Fs ; wsd = w s Fs ; pwc = 2 Ts tan(wcd 2 ); pws = 2 Ts tan(wsd 2 ); R A R ; r = pws pwp ; C = 1 m 2 m 2 ε 2 ; N = acosh(c) acosh(r). For the typical value of N, the values for b k are computed as b k = 2Y N sin( (2k 1)π ), 2N c k = (Y N ) 2 + cos 2 ( (2k 1)π ), where Y 2N N = 1 2 ([ 1 2 ε + 1 ε ] 1 N +[ 1 2 ε 1 ε ] 1 N ) and B k is A chosen by choosing the required amplitude (either A for N = odd or )for (1+ε 2 ) 2 1 N = even at w = 0). Mapping from the s-domain to z-domain (H(S) to H(z)) is obtained by substituting s = 2 1 z 1. Ts 1+z 1 Thus the bilinear transformation-based Chebyshev filter H(z) is obtained. %plotbuttermag.m %Magnitude response of the Butterworth filter function [res]=plotbuttermag(a,fc) for N=3:1:11 f=0:0.1:5; M=A./(1+(f/fc).ˆ(2*N)).ˆ(1/2); plot(f,m) hold on %plotchebymag.m function [res]=plotchebymag(a,fc,epsilon) subplot(2,1,1) %Magnitude response of the Chebyshev filter for N=3:2:11 M=[]; for f=0:0.01:5; M=[M A./(1+(epsilonˆ2)*CN(f/fc,N)ˆ2)ˆ(1/2)]; plot(0:0.01:5,m) hold on
10 52 2 Infinite Impulse Response (IIR) filter for N=2:2:11 M=[]; for f=0:0.01:5; M=[M A./(1+(epsilonˆ2)*CN(f/fc,N)ˆ2)ˆ(1/2)]; plot(0:0.01:5,m, r ) hold on subplot(2,1,2) for N=3:2:11 M=[]; for f=0:0.01:2; M=[M A./(1+(epsilonˆ2)*CN(f/fc,N)ˆ2)ˆ(1/2)]; plot(0:0.01:2,m) hold on for N=2:2:11 M=[]; for f=0:0.01:2; M=[M A./(1+(epsilonˆ2)*CN(f/fc,N)ˆ2)ˆ(1/2)]; plot(0:0.01:2,m, r ) hold on %CN.m function [res]=cn(f,n) switch f<1 case 0 res=cos(n*acos(f)); case 1 res=cosh(n*acosh(f)); %butterworthorder.m function [N]=butterworthorder(A,wc,ws,m) %Let the maximum frequency content is set as Hz %A is the magnitude at w=0 %wc is the cut-off frequency at which %the magnitude is A/sqrt(2)in rad/sec %ws is the stop band cutoff frequency %(in rad/sec) at which the magnitude expected is lesser than m N=log(((Aˆ2)/(mˆ2))-1)/(2*log(ws/wc)); N=ceil(N); fc=wc/(2*pi); f=0:1:10000; M=A./(1+(f/fc).ˆ(2*N)).ˆ(1/2); plot(f,m) %digitalbutterworth.m function [NUM,DEN,H]=digitalbutterworth(A,wc,ws,m,Fs,option) %option 1: Impulse-invariant technique %option 2: Bilinear transformation technique
11 2.2 Bilinear Transformation Mapping 53 switch option case 1 [N]=butterworthorder(A,wc,ws,m); N Ts=1/Fs; order=mod(n,2); if(order==0) N1=N; N1=N-1; b=0; for k=1:1:(n1/2) b(k)=2*sin((2*k-1)*pi/(2*n)) Ck=1; Bk=(A)ˆ(2/N); B0=1; c0=1; %Converting s domain to z-domain if(n =1) for k=1:1:length(b) [NU,DE]=impulses2z(Bk,Ck,b(k),wc,Fs) res1{k}=nu; res2{k}=de; H=1; NUM1=res1; DEN1=res2; for k=1:1:(n1/2) [H1,W]=freqz(NUM1{k},DEN1{k}); H=H.*H1; if(n==1) H=1; if(order==1) [H2,W]=freqz([B0*wc],[1 -exp(-c0*wc*ts)]) H=H.*H2; H=abs(H)/max(abs(H))*A; plot((w*fs)/(2*pi),h) if(n==1) NUM{1}=[B0*wc]; DEN{1}=[1 -exp(-c0*wc*ts)]; NUM=NUM2; DEN=DEN2;
12 54 2 Infinite Impulse Response (IIR) filter case 2 %Frequency prewarping %Needs to design the digital filter with cutoff frequency wcd=(wc/fs); wsd=(ws/fs); Ts=1/Fs; pwc=(2/ts)*tan(wcd/2); pws=(2/ts)*tan(wsd/2); [N]=butterworthorder(A,pwc,pws,m); N order=mod(n,2); if(order==0) N1=N; N1=N-1; b=0; for k=1:1:(n1/2) b(k)=2*sin((2*k-1)*pi/(2*n)); Ck=1; Bk=(A)ˆ(2/N); B0=1; c0=1; if(n =1) for k=1:1:length(b) [NU,DE]=bilinears2z(Bk,Ck,b(k),pwc,Fs); res1{k}=nu; res2{k}=de; NUM2=res1; DEN2=res2; H=1; for k=1:1:(n1/2) [H1,W]=freqz(NUM2{k},DEN2{k}); H=H.*H1; H=1; if(order==1) [H2,W]=freqz([B0*pwc*Ts B0*pwc*Ts],[(2+c0*pwc*Ts) -2+c0*pwc*Ts]); H=H.*H2; H=abs(H)/max(abs(H))*A; plot((w*fs)/(2*pi),h) if(n==1) NUM{1}=[B0*pwc*Ts B0*pwc*Ts]; DEN{1}=[(2+c0*pwc*Ts) -2+c0*pwc*Ts]; NUM=NUM2; DEN=DEN2;
13 2.2 Bilinear Transformation Mapping 55 %impulses2z.m function [NUM,DEN]=impulses2z(Bk,Ck,bk,wc,Fs) Ts=1/Fs; vector=[1 bk*wc Ck*(wcˆ2)]; [p]=roots(vector); NUM=[0 (exp(p(1)*ts)-exp(p(2)*ts))]; NUM=NUM*Bk*(wcˆ2)/(p(1)-p(2)); DEN=conv([1-1*exp(p(1)*Ts)],[1-1*exp(p(2)*Ts)]); %bilinears2z.m function [NUM,DEN]=bilinears2z(Bk,Ck,bk,wc,Fs) Ts=1/Fs; NUM=[Bk*(wcˆ2)*(Tsˆ2) 2*Bk*(wcˆ2)*(Tsˆ2) Bk*(wcˆ2)*(Tsˆ2)]; DEN=[4-2*bk*wc*Ts+Ck*(wcˆ2)*(Tsˆ2) *Ck*(wcˆ2)*(Tsˆ2) 4+2*bk*wc*Ts+Ck*(wcˆ2)*(Tsˆ2)]; %digitalchebyshev.m function [NUM,DEN,H]=digitalchebyshev(A,R,wp,ws,m,Fs,option) %option 1: Impulse invariant technique %option 2: Bilinear transformation technique switch option case 1 [N]=chebyshevorder(A,R,wp,m,ws) N Ts=1/Fs; order=mod(n,2); if(order==0) N1=N; N1=N-1; epsilon=sqrt(r/(a-r)); t=(((1/epsilonˆ2)+1)ˆ(1/2)+(1/epsilon)); Y= (1/2)*(tˆ(1/N)-tˆ(-1/N)); b=0; for k=1:1:(n1/2) b(k)=2*y*sin((2*k-1)*pi/(2*n)); C(k)=Yˆ2+(cos((2*k-1)*pi/(2*N)))ˆ(2); Bk=(A)ˆ(2/N); B0=Bk; C0=Y; wc=wp; %Converting s domain to z domain if(n =1) for k=1:1:length(b) [NU,DE]=impulses2z(Bk,C(k),b(k),wc,Fs) res1{k}=nu; res2{k}=de; H=1; NUM1=res1; DEN1=res2; for k=1:1:(n1/2) [H1,W]=freqz(NUM1{k},DEN1{k}); H=H.*H1;
14 56 2 Infinite Impulse Response (IIR) filter H=1; if(order==1) [H2,W]=freqz([B0*wc],[1 -exp(-c0*wc*ts)]); H=H.*H2; H=abs(H)/max(abs(H))*A; plot((w*fs)/(2*pi),h) if(n==1) NUM{1}=[B0*wc]; DEN{1}=[1 -exp(-c0*wc*ts)]; NUM=NUM1; DEN=DEN1; case 2 %Frequency prewarping %Needs to design the digital filter with cutoff frequency wpd=(wp/fs); wsd=(ws/fs); Ts=1/Fs; pwp=(2/ts)*tan(wpd/2); pws=(2/ts)*tan(wsd/2); [N]=chebyshevorder(A,R,pwp,m,pws) N order=mod(n,2); if(order==0) N1=N; N1=N-1; epsilon=sqrt(r/(a-r)); t=(((1/epsilonˆ2)+1)ˆ(1/2)+(1/epsilon)); Y= (1/2)*(tˆ(1/N)-tˆ(-1/N)); b=0; for k=1:1:(n1/2) b(k)=2*y*sin((2*k-1)*pi/(2*n)); C(k)=Yˆ2+(cos((2*k-1)*pi/(2*N)))ˆ(2); Bk=(A)ˆ(2/N); B0=Bk; C0=Y; pwc=pwp; if(n =1) for k=1:1:length(b) [NU,DE]=bilinears2z(Bk,C(k),b(k),pwc,Fs); res1{k}=nu; res2{k}=de; NUM2=res1;
15 2.2 Bilinear Transformation Mapping 57 DEN2=res2; H=1; for k=1:1:(n1/2) [H1,W]=freqz(NUM2{k},DEN2{k}); H=H.*H1; H=1; if(order==1) [H2,W]=freqz([B0*pwc*Ts B0*pwc*Ts],[(2+C0*pwc*Ts) -2+C0*pwc*Ts]); H=H.*H2; H=abs(H)/max(abs(H))*A; plot((w*fs)/(2*pi),h) if(n==1) NUM{1}=[B0*pwc*Ts B0*pwc*Ts]; DEN{1}=[(2+C0*pwc*Ts) -2+C0*pwc*Ts]; NUM=NUM2; DEN=DEN2; %chebyshevorder.m function [N]=chebyshevorder(A,R,wp,m,ws) %Let the maximum frequency content is set as Hz %R is the ripple width %A/sqrt(2) is the amplitude expected at wp=wc in rad/sec %The amplitude expected at stopband cutoff frequency ws in rad/sec is lesser %than m epsilon=sqrt(r/(a-r)); r=ws/wp; C=sqrt(((1/(mˆ2))-1)/(epsilonˆ2)); N=ceil(acosh(C)/acosh(r)); fc=wp/(2*pi); M=[]; for f=0:1:10000; M=[M A./(1+(epsilonˆ2)*CN(f/fc,N)ˆ2)ˆ(1/2)]; plot(0:1:10000,m)
16 58 2 Infinite Impulse Response (IIR) filter Comments on Fig. 2.7 and Fig Figure 2.7a shows the inted magnitude response of the Butterworth low-pass filter, which is obtained by plotting (2.9) for the typical values of N and wc. Figure 2.7b shows the magnitude response of the actually designed Butterworth filter. This is obtained by mapping H a (s) (refer (2.7) and (2.8)) to H(z), followed by computing the magnitude response of the transfer function H(z). It is seen that the inted magnitude response and the magnitude response of the designed filter are almost identical. 2. Figure 2.8a shows the inted magnitude response of the Chebyshev low-pass filter, which is obtained by plotting the (2.10) for the typical values of N, wc, and ε. Figure 2.8c shows the magnitude response of the actually designed Chebyshev filter. This is obtained by mapping H a (s) (refer (2.7) and (2.8)) to H(z), followed by computing the magnitude response of the transfer function H(z). It is seen that the inted magnitude response and the magnitude response of the designed filter are almost identical. 3. For the bilinear transformation, we need to get the prewarped specification to design the inted low-pass filter that has the magnitude response as shown in Fig. 2.7a (Butterworth filter) and Fig. 2.8a (Chebyshev filter). The magnitude Fig. 2.7 Magnitude response of the designed Butterworth IIR low-pass filter (with magnitude response less than 0.1 at fs = 3000 Hz (stop band frequency) and 3dB cutoff at fc= 500 Hz (refer Sects and 2.2.3). The sampling frequency is Fs = Hz. a Inted low-pass filter. b Actually designed filter using impulse-invariant technique. c Specification after frequency prewarping. d Actual designed filter using bilinear transformation
17 2.2 Bilinear Transformation Mapping 59 Fig. 2.8 Magnitude response of the designed Chebyshev IIR low-pass filter (with magnitude response less than 0.1at fs = 3000 Hz (stop band frequency), fc= 500 Hz (refer Sects and 2.2.5)and Ripplewidth(R) = 0.2. The sampling frequency is Fs = Hz. a Inted low-pass filter.b Specification after frequency pre-warping. c Actually designed filter using impulse-invariant technique. d Actual designed filter using bilinear transformation response of the IIR filter with the prewarped frequency specifications is shown in Fig. 2.7c (Butterworth filter) and Fig. 2.8b (Chebyshev filter) and the magnitude response of the actually designed IIR filter using bilinear transformation is shown in Fig. 2.7d (Butterworth filter) and Fig. 2.8d (Chebyshev filter). It is seen that amplitude of the magnitude response of the filter after transformation is lesser than the corresponding value in the prewarped specification. This helps in avoiding overlapping of spectrum Design of High-Pass, Bandpass, and Band-Reject IIR Filter High-Pass Filter Given the low-pass filter transfer function H(e jw d ) with cutoff w c radians, the highpass filter is obtained as H(e j (π w d )) with cutoff π w c. This is equivalent to replacing z with z in the z-transformation corresponding to LPF to obtain the HPF z-transform. Digital Butterworth high-pass filter using impulse invariant trans-
18 60 2 Infinite Impulse Response (IIR) filter Fig. 2.9 Magnitude response of the Butterworth high-pass filter using impulse-invariant mapping formation and bilinear transformation with pass band cutoff 8π rad/sec, stop band cutoff frequency 2π rad/sec, and sampling frequency F s = 10 Hz is illustrated in Figs. 2.9 and 2.10, respectively. It is seen from Fig. 2.9 that the Aliasing occur at the lower frequencies. It is also noted that there exists nonzero amplitude at DC (0 Hz). This is the undesirable characteristics and hence impulse-invariant mapping is not usually used to design high-pass filter. This is circumvented using the bilinear transformation and is illustrated in Fig %ButterworthHPFdemo.m %Digital Butterworth high-pass filter using %Impulse invariant and bilinear transformation with pass band cutoff %2*pi*4 rad/sec, stop band cutoff frequency 2*pi*1 rad/sec %magnitude at the stop band lesser than 0.1 and the sampling frequency 10 Hz [NUM,DEN,H]=digitalbutterworthHPF(1,2*pi*4,2*pi*1,0.1,10,1) [NUM,DEN,H]=digitalbutterworthHPF(1,2*pi*4,2*pi*1,0.1,10,1) %digitalbutterworthhpf.m function [NUM,DEN,H]=digitalbutterworthHPF(A,wc,ws,m,Fs,option) wc=(pi-(wc/fs))*fs ws=(pi-(ws/fs))*fs %option 1: Impulse invariant technique %option 2: Bilinear transformation technique switch option case 1 [N]=butterworthorder(A,wc,ws,m); N Ts=1/Fs; order=mod(n,2);
19 2.2 Bilinear Transformation Mapping 61 Fig Magnitude response of the Butterworth high-pass filter using bilinear transformation mapping if(order==0) N1=N; N1=N-1; b=0; for k=1:1:(n1/2) b(k)=2*sin((2*k-1)*pi/(2*n)) Ck=1; Bk=(A)ˆ(2/N); B0=1; c0=1; %Converting s domain to z domain if(n =1) for k=1:1:length(b) [NU,DE]=impulses2z(Bk,Ck,b(k),wc,Fs) L1=length(NU) if(mod(l1,2)==1) L=(L1+1)/2; s1=[ones(1,l/2);zeros(1,l/2)]*2-1 s1=reshape(s1,1,size(s1,1)*size(s1,2)) s1=[s1 1]; L=L1/2; s1=[ones(1,l);zeros(1,l)]*2-1 s1=reshape(s1,1,size(s1,1)*size(s1,2)) res1{k}=nu.*s1; L2=length(DE); if(mod(l2,2)==1)
20 62 2 Infinite Impulse Response (IIR) filter L=(L2+1)/2; s2=[ones(1,l/2);zeros(1,l/2)]*2-1; s2=reshape(s2,1,size(s2,1)*size(s2,2)); s2=[s2 1]; L=L2/2; s2=[ones(1,l);zeros(1,l)]*2-1; s2=reshape(s2,1,size(s2,1)*size(s2,2)); res2{k}=de.*s2 H=1; NUM1=res1; DEN1=res2; for k=1:1:(n1/2) [H1,W]=freqz(NUM1{k},DEN1{k}) H=H.*H1; H=1; if(order==1) [H2,W]=freqz([B0*wc],[1 exp(-c0*wc*ts)]); H=H.*H2; H=abs(H)/max(abs(H))*A; plot((w*fs)/(2*pi),h) if(n==1) NUM{1}=[B0*wc]; DEN{1}=[1 exp(-c0*wc*ts)]; NUM=NUM1; DEN=DEN1; case 2 %Frequency prewarping %Needs to design the digital filter with cutoff frequency wcd=(wc/fs); wsd=(ws/fs); Ts=1/Fs; pwc=(2/ts)*tan(wcd/2); pws=(2/ts)*tan(wsd/2); [N]=butterworthorder(A,pwc,pws,m); N order=mod(n,2); if(order==0) N1=N; N1=N-1; b=0; for k=1:1:(n1/2) b(k)=2*sin((2*k-1)*pi/(2*n)); Ck=1;
21 2.2 Bilinear Transformation Mapping 63 Bk=(A)ˆ(2/N); B0=1; c0=1; if(n =1) for k=1:1:length(b) [NU,DE]=bilinears2z(Bk,Ck,b(k),pwc,Fs) L1=length(NU); if(mod(l1,2)==1) L=(L1+1)/2; s1=[ones(1,l/2);zeros(1,l/2)]*2-1; s1=reshape(s1,1,size(s1,1)*size(s1,2)); s1=[s1 1]; L=L1/2; s1=[ones(1,l/2);zeros(1,l/2)]*2-1; s1=reshape(s1,1,size(s1,1)*size(s1,2)); res1{k}=nu.*s1; L2=length(DE); if(mod(l2,2)==1) L=(L2+1)/2; s2=[ones(1,l/2);zeros(1,l/2)]*2-1; s2=reshape(s2,1,size(s2,1)*size(s2,2)); s2=[s2 1]; L=L2/2; s2=[ones(1,l);zeros(1,l)]*2-1; s2=reshape(s2,1,size(s2,1)*size(s2,2)); res2{k}=de.*s2; NUM2=res1; DEN2=res2; H=1; for k=1:1:(n1/2) [H1,W]=freqz(NUM2{k},DEN2{k}); H=H.*H1; H=1; if(order==1) [H2,W]=freqz([B0*pwc*Ts -B0*pwc*Ts],[(2+c0*pwc*Ts) 2-c0*pwc*Ts]); H=H.*H2; H=abs(H)/max(abs(H))*A; plot((w*fs)/(2*pi),h) if(n==1) NUM{1}=[B0*pwc*Ts -B0*pwc*Ts] DEN{1}=[(2+c0*pwc*Ts) 2-c0*pwc*Ts] NUM=NUM2; DEN=DEN2;
22 64 2 Infinite Impulse Response (IIR) filter %chebyshevhpfdemo.m %Digital Chebyshev high-pass filter using %Impulse invariant and Bilinear transformation with pass band cutoff %2*pi*4 rad/sec, stop band cutoff frequency 2*pi*1 rad/sec, Ripple width 0.5 %magnitude at the stop band lesser than 0.1 and the sampling frequency 10 Hz [NUM,DEN,H]=digitalchebyshevHPF(1,0.5,2*pi*4,2*pi*1,0.1,10,1) [NUM,DEN,H]=digitalchebyshevHPF(1,0.5,2*pi*4,2*pi*1,0.1,10,2) %digitalchebyshevhpf.m function [NUM,DEN,H]=digitalchebyshevHPF(A,R,wp,ws,m,Fs,option) wp=(pi-(wp/fs))*fs ws=(pi-(ws/fs))*fs %option 1: Impulse invariant technique %option 2: Bilinear transformation technique switch option case 1 [N]=chebyshevorder(A,R,wp,m,ws) N Ts=1/Fs; order=mod(n,2); if(order==0) N1=N; N1=N-1; epsilon=sqrt(r/(a-r)); t=(((1/epsilonˆ2)+1)ˆ(1/2)+(1/epsilon)); Y= (1/2)*(tˆ(1/N)-tˆ(-1/N)); b=0; for k=1:1:(n1/2) b(k)=2*y*sin((2*k-1)*pi/(2*n)); C(k)=Yˆ2+(cos((2*k-1)*pi/(2*N)))ˆ(2); Bk=(A)ˆ(2/N); B0=Bk; C0=Y; wc=wp; %Converting s domain to z domain if(n =1) for k=1:1:length(b) [NU,DE]=impulses2z(Bk,C(k),b(k),wc,Fs) L1=length(NU) if(mod(l1,2)==1) L=(L1+1)/2; s1=[ones(1,l/2);zeros(1,l/2)]*2-1 s1=reshape(s1,1,size(s1,1)*size(s1,2)) s1=[s1 1]; L=L1/2; s1=[ones(1,l);zeros(1,l)]*2-1 s1=reshape(s1,1,size(s1,1)*size(s1,2)) res1{k}=nu.*s1; L2=length(DE); if(mod(l2,2)==1) L=(L2+1)/2; s2=[ones(1,l/2);zeros(1,l/2)]*2-1;
23 2.2 Bilinear Transformation Mapping 65 s2=reshape(s2,1,size(s2,1)*size(s2,2)); s2=[s2 1]; L=L2/2; s2=[ones(1,l);zeros(1,l)]*2-1; s2=reshape(s2,1,size(s2,1)*size(s2,2)); res2{k}=de.*s2 H=1; NUM1=res1; DEN1=res2; for k=1:1:(n1/2) [H1,W]=freqz(NUM1{k},DEN1{k}); H=H.*H1; H=1; if(order==1) [H2,W]=freqz([B0*wc],[1 exp(-c0*wc*ts)]); H=H.*H2; H=abs(H)/max(abs(H))*A; plot((w*fs)/(2*pi),h) if(n==1) NUM{1}=[B0*wc]; DEN{1}=[1 exp(-c0*wc*ts)]; NUM=NUM1; DEN=DEN1; case 2 %Frequency prewarping %Needs to design the digital filter with cutoff frequency wpd=(wp/fs); wsd=(ws/fs); Ts=1/Fs; pwp=(2/ts)*tan(wpd/2); pws=(2/ts)*tan(wsd/2); [N]=chebyshevorder(A,R,pwp,m,pws) N order=mod(n,2); if(order==0) N1=N; N1=N-1; epsilon=sqrt(r/(a-r)); t=(((1/epsilonˆ2)+1)ˆ(1/2)+(1/epsilon)); Y= (1/2)*(tˆ(1/N)-tˆ(-1/N)); b=0; for k=1:1:(n1/2) b(k)=2*y*sin((2*k-1)*pi/(2*n)); C(k)=Yˆ2+(cos((2*k-1)*pi/(2*N)))ˆ(2);
24 66 2 Infinite Impulse Response (IIR) filter Bk=(A)ˆ(2/N); B0=Bk; C0=Y; pwc=pwp; if(n =1) for k=1:1:length(b) [NU,DE]=bilinears2z(Bk,C(k),b(k),pwc,Fs); L1=length(NU) if(mod(l1,2)==1) L=(L1+1)/2; s1=[ones(1,l/2);zeros(1,l/2)]*2-1 s1=reshape(s1,1,size(s1,1)*size(s1,2)) s1=[s1 1]; L=L1/2; s1=[ones(1,l);zeros(1,l)]*2-1 s1=reshape(s1,1,size(s1,1)*size(s1,2)) res1{k}=nu.*s1; L2=length(DE); if(mod(l2,2)==1) L=(L2+1)/2; s2=[ones(1,l/2);zeros(1,l/2)]*2-1; s2=reshape(s2,1,size(s2,1)*size(s2,2)); s2=[s2 1]; L=L2/2; s2=[ones(1,l);zeros(1,l)]*2-1; s2=reshape(s2,1,size(s2,1)*size(s2,2)); res2{k}=de.*s2; NUM2=res1; DEN2=res2; H=1; for k=1:1:(n1/2) [H1,W]=freqz(NUM2{k},DEN2{k}); H=H.*H1; H=1; if(order==1) [H2,W]=freqz([B0*pwc*Ts -B0*pwc*Ts],[(2+C0*pwc*Ts) 2-C0*pwc*Ts]); H=H.*H2; H=abs(H)/max(abs(H))*A; plot((w*fs)/(2*pi),h) if(n==1) NUM{1}=[B0*pwc*Ts -B0*pwc*Ts ];
25 2.2 Bilinear Transformation Mapping 67 DEN{1}=[(2+C0*pwc*Ts) 2-C0*pwc*Ts ]; NUM=NUM2; DEN=DEN2; Bandpass Filter Bandpass filter is obtained as the cascade of low-pass filter with cutoff frequency wc 2 and high-pass filter with cutoff frequency wc 1 (Figs and 2.12). The bandpass filter with wc 1 = 2π rad/sec and wc 2 = 8π rad/sec is illustrated in Fig. 2.13a c (Butterworth filter) and Fig. 2.13d f (Chebyshev filter) using bilinear transformation technique. It is constructed using the cascade connection of low-pass filter (with cutoff frequency wc 2 = 8π rad/sec and stop band cutoff frequency ws 2 = 2π0.1 F s 2 rad/sec), followed by the high-pass filter (with cutoff frequency wc 1 = 2π rad/sec and ws 1 = 2π0.9 F s rad/sec). Impulse-invariant (lead to overlapping) is not usually 2 chosen to design other than low-pass filter. Hence, illustration of bandpass filter using bilinear transformation is demonstrated. Fig Magnitude response of the Chebyshev high-pass filter using impulse-invariant mapping. It is seen that the magnitude is nonzero at f = 0 Hz. This is due to overlapping of spectrum
26 68 2 Infinite Impulse Response (IIR) filter Fig Magnitude response of the Chebyshev high-pass filter using bilinear transformation mapping %IIRBPFDEMO.m A=1; wc1=2*pi*1; wc2=2*pi*4; m=0.001; Fs=10; Ripple=0.5; %Using Butterworth filter and impulse-invariant transformation [NUM,DEN,H]=digitalBPF(1,Ripple,wc1,wc2,m,Fs,1,2); ; plot(linspace(0,fs/2,length(h)),abs(h)); %Using Chebyshevfilter and bilinear transformation [NUM,DEN,H]=digitalBPF(1,Ripple,wc1,wc2,m,Fs,2,2); plot(linspace(0,fs/2,length(h)),abs(h)); function [NUM,DEN,H]=digitalBPF(A,R,wc1,wc2,m,Fs,option1,option2) %R is the ripple width used in case of Chebyshev filter %A is the maximum amplitude of the filter %H is the normalized magnitude response of the designed filter %wc1 and wc2 are the cutoff frequencies in rad/sec %option1:1->butterworth 2->Chebyshev filter %option2: 1->Impulse invariant 2->Bilinear Fmax=Fs/2;
27 2.2 Bilinear Transformation Mapping 69 Fig Bandpass filter using bilinear transformation. a Butterworthlow-pass filter. b Butterworth high-pass filter. c Corresponding Butterworth bandpass filter as the cascade of low-pass and highpass filter. d Chebyshev low-pass filter. e Chebyshev high-pass filter. f Corresponding Chebyshev bandpass filter as the cascade of low-pass and high-pass filter ws1=2*pi*0.1*(fmax); ws2=2*pi*0.9*(fmax); switch option1 case 1 switch option2 case 1 [N1,D1,H1]=digitalbutterworth(A,wc2,ws2,m,Fs,1); [N2,D2,H2]=digitalbutterworthHPF(A,wc1,ws1,m,Fs,1); case 2 [N1,D1,H1]=digitalbutterworth(A,wc2,ws2,m,Fs,2); [N2,D2,H2]=digitalbutterworthHPF(A,wc1,ws1,m,Fs,2); case 2 switch option2 case 1 [N1,D1,H1]=digitalchebyshev(A,R,wc2,ws2,m,Fs,1); [N2,D2,H2]=digitalchebyshevHPF(A,R,wc1,ws1,m,Fs,1); case 2 [N1,D1,H1]=digitalchebyshev(A,R,wc2,ws2,m,Fs,2); [N2,D2,H2]=digitalchebyshevHPF(A,R,wc1,ws1,m,Fs,2); temp1=1; temp2=1; temp3=1;
28 70 2 Infinite Impulse Response (IIR) filter for i=1:1:length(n1) temp1=conv(temp1,n1{i}) temp2=conv(temp2,d1{i}) for i=1:1:length(n2) temp1=conv(temp1,n2{i}) temp2=conv(temp2,d2{i}) NUM=temp1; DEN=temp2; H=H1.*H2; Band-reject Filter Band-reject filter is obtained as the parallel connection of low-pass filter with cutoff frequency wc 1 and the high-pass filter with cutoff frequency wc 2. The band-reject filter with wc 1 = 2π rad/sec and wc 2 = 8π rad/sec is illustrated in Fig. 2.14a c (Butterworth filter) and Fig. 2.14d f (Chebyshev filter) using bilinear transformation technique. It is constructed using the parallel connection of low-pass filter (with cutoff frequency wc 1 = 2π rad/sec and stop band cutoff frequency ws 1 = 2π0.9 F s 2 ), followed by the high-pass filter (with cutoff frequency wc 2 = 2π rad/sec and ws 2 = 2π0.1 F s ). Impulse-invariant (lead to overlapping) is not usually chosen to design 2 other than low-pass filter. Hence, realization using the bilinear transformation is demonstrated. %IIRBRFdemo.m A=1; wc1=2*pi*1; wc2=2*pi*4; m=0.001; Fs=10; Ripple=0.5; %Using Butterworth filter and impulse-invariant transformation [NUM,DEN,H]=digitalBRF(1,Ripple,wc1,wc2,m,Fs,1,2); ; plot(linspace(0,fs/2,length(h{1})),(1/2)*(abs(h{1})+abs(h{2}))); %Using Chebyshev filter and bilinear transformation [NUM,DEN,H]=digitalBRF(1,Ripple,wc1,wc2,m,Fs,2,2); plot(linspace(0,fs/2,length(h{1})),(1/2)*(abs(h{1})+abs(h{2}))); %digitalbrf.m function [NUM,DEN,H]=digitalBRF(A,R,wc1,wc2,m,Fs,option1,option2) %option1:1->butterworth 2->Chebyshev filter %option2: 1->Impulse invariant 2->Bilinear %R is the ripple width used in case of Chebyshev filter Fmax=Fs/2; ws1=2*pi*0.9*(fmax); ws2=2*pi*0.1*(fmax); switch option1 case 1
29 2.2 Bilinear Transformation Mapping 71 Fig Band-reject filter using bilinear transformation. a Butterworth low-pass filter. b Butterworth high-pass filter. c Corresponding band-reject filter as the parallel summation of low-pass and high-pass filter. d Chebyshev low-pass filter. e Chebyshev high-pass filter. f Corresponding Chebyshev band-reject filter as the parallel summation of low-pass and high-pass filter switch option2 case 1 [N1,D1,H1]=digitalbutterworth(A,wc1,ws1,m,Fs,1); [N2,D2,H2]=digitalbutterworthHPF(A,wc2,ws2,m,Fs,1); case 2 [N1,D1,H1]=digitalbutterworth(A,wc1,ws1,m,Fs,2); [N2,D2,H2]=digitalbutterworthHPF(A,wc2,ws2,m,Fs,2); case 2 switch option2 case 1 [N1,D1,H1]=digitalchebyshev(A,R,wc1,ws1,m,Fs,1); [N2,D2,H2]=digitalchebyshevHPF(A,R,wc2,ws2,m,Fs,1); case 2 [N1,D1,H1]=digitalchebyshev(A,R,wc1,ws1,m,Fs,2); [N2,D2,H2]=digitalchebyshevHPF(A,R,wc2,ws2,m,Fs,2); NUM=N1; DEN=D1; H{1}=H1; H{2}=H2;
30 72 2 Infinite Impulse Response (IIR) filter 2.3 Realization Let the transfer function of the typical IIR filter is given as follows: H(z) = a 0 + a 1 z 1 + a 2 z 2 + a p z p. (2.11) b 0 + b 1 z 1 + b 2 z 3 + b q z q Realization of the IIR filter is the method of obtaining the output sequence y(n) corresponding to the input sequence x(n) to the linear IIR filter h(n). This is done as follows Direct Form 1 Let X (z), Y (z) be the z-transformation of the sequence x(n) and y(n), respectively: Y (z) X (z) = a 0 + a 1 z 1 + a 2 z 2 + a 3 z 3 + a p z p. (2.12) b 0 + b 1 z 1 + b 2 z 2 + b 3 z 3 + +b q z q Taking inverse z-transformation, we get the following difference equations: y(n) = a 0 b 0 x(n) + a 1 b 0 x(n 1) + a 2 b 0 x(n 2) + + a p b 0 x(n p) b 1 b 0 y(n 1) b 2 b 0 y(n 2) b q b 0 y(n q) Direct Form 2 Let Y (z) X (z) = Y (z) W (z) W (z) X (z), Y (z) W (z) = a 0 + a 1 z 1 + a 2 z 2 + a p z p W (z) X (z) = 1 b 0 +b 1 z 1 +b 2 z 2 + b q z q. Taking inverse z-transformation, we get the following difference equations: w(n) = 1 x(n) b 1 w(n 1) b 2 w(n 2) b 0 b 0 b 0 y(n) = a 0 w(n) + a 1 w(n 1) + a 2 w(n 2). We see that to realize IIR filter using Direct form I, we need number of (p + q) number of taps. But to realize using Direct form II, we need only max(p, q) number of taps at the cost of time required for the computation. and
31 2.3 Realization Illustration Consider the input signal x(t) = k=3 k=1 A ksin(2π f k t) is sampled using the sampling frequency Fs to obtain the discrete sequence x(n) = k=3 k=1 sin(2π f knts). The digital impulse-invariant Butterworth IIR filter is designed to filter f 3 as given below. 1. Let A 1 = 1, A 2 = 1 and A 3 = 1, f 1 = 10, f 2 = 15 and f 3 = The specification is obtained as follows: Butterworth low-pass filter is designed with A = 1, wc = 2 pi 30, ws = 2 pi 100, Fs = 500 and the amplitude is lesser than 0.1 atws. 3. The transfer function of the filter is obtained as H(z) = Z 1. (2.13) Z Z 2 4. Direct form 1: For the input sequence x(n), the corresponding output sequence is obtained as follows: y(n) = 53.79x(n 1) 1.477y(n 1) y(n 2). 5. Direct form 2: For the input sequence x(n), the corresponding output sequence is obtained as follows: w(n) = x(n) w(n 1) w(n 2), y(n) = 53.79w(n 1). 6. The number of taps needed for realization of the filter is 3 for Direct form I (DF1) and 2 for Direct form II (DF2). The elapsed time required for DF1 and DF2 realization is given as and s, respectively. 7. Figure 2.15 illustrates the realization of IIR filter using Direct form I and are identical with that of the magnitude response realized using Direct form II. Figure 2.16 illustrates the magnitude response of IIR filter corresponding to the transfer function (2.13). %realizeiir.m A1=1; A2=1; A3=1; f1=10; f2=15; f3=200; A=1; wc=2*pi*30; ws=2*pi*100; Fs=500; Ts=1/Fs; m=0.1; n=0:1:1000; S=A1*sin(2*pi*f1*n*Ts)+A2*sin(2*pi*f2*n*Ts)+A3*sin(2*pi*f3*n*Ts); [NUM,DEN,H]=digitalbutterworth(A,wc,ws,m,Fs,1); NUM{1} DEN{1} temp1=1; temp2=1; for k=1:1:length(num) temp1=conv(temp1,num{k});
32 74 2 Infinite Impulse Response (IIR) filter Fig Demonstration on the Direct form I realization of IIR filter using a input signal, b Filtered signal, c spectrum of the input signal, d spectrum of the filtered signal Fig Magnitude response of the IIR filter used to filter the input signal (refer Fig. 2.15)
33 2.3 Realization 75 for k=1:1:length(den) temp2=conv(temp2,den{k}); temp1=temp1+eps; [H,W]=freqz(temp1,temp2); plot(fs*w/(2*pi),abs(h)/max(abs(h))) %Direct form I realization y=zeros(1,length(temp2)+1); tic for n=length(y)+1:1:1000 temp=0; for r=0:1:length(temp1)-1 temp=temp+temp1(r+1)*s(n-r); for s=1:1:length(temp2)-1 temp=temp-1*temp2(s+1)*y(n-s); temp=temp/temp2(1); y=[y temp]; toc S=S/max(S); y=y/max(y); FRS=abs(fft(S))/max(abs(fft(S))); FRy=abs(fft(y))/max(abs(fft(y))); subplot(2,2,1) plot(s) subplot(2,2,2) plot(y) subplot(2,2,3) plot(linspace(0,fs,length(s)),frs) subplot(2,2,4) plot(linspace(0,fs,length(y)),fry) %Directform II realization M=max(length(temp1),length(temp2)); y=zeros(1,m+1); w=zeros(1,m+1); tic for n=length(w):1:1000 temp=0; temp=s(n); for r=1:1:length(temp2)-1 temp=temp-temp2(r+1)*w(n-r); w(n)=temp/temp2(1); temp=0; for s=0:1:length(temp1)-1 temp=temp+temp1(s+1)*w(n-s); y=[y temp]; toc S=S/max(S); y=y/max(y);
34 76 2 Infinite Impulse Response (IIR) filter FRS=abs(fft(S))/max(abs(fft(S))); FRy=abs(fft(y))/max(abs(fft(y))); subplot(2,2,1) plot(s) subplot(2,2,2) plot(y) subplot(2,2,3) plot(linspace(0,fs,length(s)),frs) subplot(2,2,4) plot(linspace(0,fs,length(y)),fry)
35
LECTURER NOTE SMJE3163 DSP
 LECTURER NOTE SMJE363 DSP (04/05-) ------------------------------------------------------------------------- Week3 IIR Filter Design -------------------------------------------------------------------------
LECTURER NOTE SMJE363 DSP (04/05-) ------------------------------------------------------------------------- Week3 IIR Filter Design -------------------------------------------------------------------------
Infinite Impulse Response (IIR) Filter. Ikhwannul Kholis, ST., MT. Universitas 17 Agustus 1945 Jakarta
 Filter. Ikhwannul Kholis, ST., MT. Universitas 17 Agustus 1945 Jakarta") Infinite Impulse Response (IIR) Filter Ihwannul Kholis, ST., MT. Universitas 17 Agustus 1945 Jaarta The Outline 8.1 State-of-the-art 8.2 Coefficient Calculation Method for IIR Filter 8.2.1 Pole-Zero Placement
Infinite Impulse Response (IIR) Filter Ihwannul Kholis, ST., MT. Universitas 17 Agustus 1945 Jaarta The Outline 8.1 State-of-the-art 8.2 Coefficient Calculation Method for IIR Filter 8.2.1 Pole-Zero Placement
EELE 4310: Digital Signal Processing (DSP)
") EELE 4310: Digital Signal Processing (DSP) Chapter # 10 : Digital Filter Design (Part One) Spring, 2012/2013 EELE 4310: Digital Signal Processing (DSP) - Ch.10 Dr. Musbah Shaat 1 / 19 Outline 1 Introduction
EELE 4310: Digital Signal Processing (DSP) Chapter # 10 : Digital Filter Design (Part One) Spring, 2012/2013 EELE 4310: Digital Signal Processing (DSP) - Ch.10 Dr. Musbah Shaat 1 / 19 Outline 1 Introduction
4. Design of Discrete-Time Filters
 4. Design of Discrete-Time Filters 4.1. Introduction (7.0) 4.2. Frame of Design of IIR Filters (7.1) 4.3. Design of IIR Filters by Impulse Invariance (7.1) 4.4. Design of IIR Filters by Bilinear Transformation
4. Design of Discrete-Time Filters 4.1. Introduction (7.0) 4.2. Frame of Design of IIR Filters (7.1) 4.3. Design of IIR Filters by Impulse Invariance (7.1) 4.4. Design of IIR Filters by Bilinear Transformation
ECE503: Digital Filter Design Lecture 9
 ECE503: Digital Filter Design Lecture 9 D. Richard Brown III WPI 26-March-2012 WPI D. Richard Brown III 26-March-2012 1 / 33 Lecture 9 Topics Within the broad topic of digital filter design, we are going
ECE503: Digital Filter Design Lecture 9 D. Richard Brown III WPI 26-March-2012 WPI D. Richard Brown III 26-March-2012 1 / 33 Lecture 9 Topics Within the broad topic of digital filter design, we are going
Digital Processing of Continuous-Time Signals
 Chapter 4 Digital Processing of Continuous-Time Signals 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 4-1-1 Digital Processing of Continuous-Time Signals Digital
Chapter 4 Digital Processing of Continuous-Time Signals 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 4-1-1 Digital Processing of Continuous-Time Signals Digital
NH 67, Karur Trichy Highways, Puliyur C.F, Karur District DEPARTMENT OF INFORMATION TECHNOLOGY DIGITAL SIGNAL PROCESSING UNIT 3
 NH 67, Karur Trichy Highways, Puliyur C.F, 639 114 Karur District DEPARTMENT OF INFORMATION TECHNOLOGY DIGITAL SIGNAL PROCESSING UNIT 3 IIR FILTER DESIGN Structure of IIR System design of Discrete time
NH 67, Karur Trichy Highways, Puliyur C.F, 639 114 Karur District DEPARTMENT OF INFORMATION TECHNOLOGY DIGITAL SIGNAL PROCESSING UNIT 3 IIR FILTER DESIGN Structure of IIR System design of Discrete time
Digital Processing of
 Chapter 4 Digital Processing of Continuous-Time Signals 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 4-1-1 Digital Processing of Continuous-Time Signals Digital
Chapter 4 Digital Processing of Continuous-Time Signals 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 4-1-1 Digital Processing of Continuous-Time Signals Digital
IIR Filter Design Chapter Intended Learning Outcomes: (i) Ability to design analog Butterworth filters
 Ability to design analog Butterworth filters") IIR Filter Design Chapter Intended Learning Outcomes: (i) Ability to design analog Butterworth filters (ii) Ability to design lowpass IIR filters according to predefined specifications based on analog
IIR Filter Design Chapter Intended Learning Outcomes: (i) Ability to design analog Butterworth filters (ii) Ability to design lowpass IIR filters according to predefined specifications based on analog
EE 470 Signals and Systems
 EE 470 Signals and Systems 9. Introduction to the Design of Discrete Filters Prof. Yasser Mostafa Kadah Textbook Luis Chapparo, Signals and Systems Using Matlab, 2 nd ed., Academic Press, 2015. Filters
EE 470 Signals and Systems 9. Introduction to the Design of Discrete Filters Prof. Yasser Mostafa Kadah Textbook Luis Chapparo, Signals and Systems Using Matlab, 2 nd ed., Academic Press, 2015. Filters
UNIT-II MYcsvtu Notes agk
 UNIT-II agk UNIT II Infinite Impulse Response Filter design (IIR): Analog & Digital Frequency transformation. Designing by impulse invariance & Bilinear method. Butterworth and Chebyshev Design Method.
UNIT-II agk UNIT II Infinite Impulse Response Filter design (IIR): Analog & Digital Frequency transformation. Designing by impulse invariance & Bilinear method. Butterworth and Chebyshev Design Method.
The University of Texas at Austin Dept. of Electrical and Computer Engineering Final Exam
 The University of Texas at Austin Dept. of Electrical and Computer Engineering Final Exam Date: December 18, 2017 Course: EE 313 Evans Name: Last, First The exam is scheduled to last three hours. Open
The University of Texas at Austin Dept. of Electrical and Computer Engineering Final Exam Date: December 18, 2017 Course: EE 313 Evans Name: Last, First The exam is scheduled to last three hours. Open
UNIT II IIR FILTER DESIGN
 UNIT II IIR FILTER DESIGN Structures of IIR Analog filter design Discrete time IIR filter from analog filter IIR filter design by Impulse Invariance, Bilinear transformation Approximation of derivatives
UNIT II IIR FILTER DESIGN Structures of IIR Analog filter design Discrete time IIR filter from analog filter IIR filter design by Impulse Invariance, Bilinear transformation Approximation of derivatives
Digital Signal Processing
 COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #25 Wednesday, November 5, 23 Aliasing in the impulse invariance method: The impulse invariance method is only suitable for filters with a bandlimited
COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #25 Wednesday, November 5, 23 Aliasing in the impulse invariance method: The impulse invariance method is only suitable for filters with a bandlimited
Subtractive Synthesis. Describing a Filter. Filters. CMPT 468: Subtractive Synthesis
 Subtractive Synthesis CMPT 468: Subtractive Synthesis Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University November, 23 Additive synthesis involves building the sound by
Subtractive Synthesis CMPT 468: Subtractive Synthesis Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University November, 23 Additive synthesis involves building the sound by
Chapter 7 Filter Design Techniques. Filter Design Techniques
 Chapter 7 Filter Design Techniques Page 1 Outline 7.0 Introduction 7.1 Design of Discrete Time IIR Filters 7.2 Design of FIR Filters Page 2 7.0 Introduction Definition of Filter Filter is a system that
Chapter 7 Filter Design Techniques Page 1 Outline 7.0 Introduction 7.1 Design of Discrete Time IIR Filters 7.2 Design of FIR Filters Page 2 7.0 Introduction Definition of Filter Filter is a system that
Final Exam Solutions June 14, 2006
 Name or 6-Digit Code: PSU Student ID Number: Final Exam Solutions June 14, 2006 ECE 223: Signals & Systems II Dr. McNames Keep your exam flat during the entire exam. If you have to leave the exam temporarily,
Name or 6-Digit Code: PSU Student ID Number: Final Exam Solutions June 14, 2006 ECE 223: Signals & Systems II Dr. McNames Keep your exam flat during the entire exam. If you have to leave the exam temporarily,
ELEC-C5230 Digitaalisen signaalinkäsittelyn perusteet
 ELEC-C5230 Digitaalisen signaalinkäsittelyn perusteet Lecture 10: Summary Taneli Riihonen 16.05.2016 Lecture 10 in Course Book Sanjit K. Mitra, Digital Signal Processing: A Computer-Based Approach, 4th
ELEC-C5230 Digitaalisen signaalinkäsittelyn perusteet Lecture 10: Summary Taneli Riihonen 16.05.2016 Lecture 10 in Course Book Sanjit K. Mitra, Digital Signal Processing: A Computer-Based Approach, 4th
Electrical & Computer Engineering Technology
 Electrical & Computer Engineering Technology EET 419C Digital Signal Processing Laboratory Experiments by Masood Ejaz Experiment # 1 Quantization of Analog Signals and Calculation of Quantized noise Objective:
Electrical & Computer Engineering Technology EET 419C Digital Signal Processing Laboratory Experiments by Masood Ejaz Experiment # 1 Quantization of Analog Signals and Calculation of Quantized noise Objective:
Infinite Impulse Response Filters
 6 Infinite Impulse Response Filters Ren Zhou In this chapter we introduce the analysis and design of infinite impulse response (IIR) digital filters that have the potential of sharp rolloffs (Tompkins
6 Infinite Impulse Response Filters Ren Zhou In this chapter we introduce the analysis and design of infinite impulse response (IIR) digital filters that have the potential of sharp rolloffs (Tompkins
1. Find the magnitude and phase response of an FIR filter represented by the difference equation y(n)= 0.5 x(n) x(n-1)
= 0.5 x(n) x(n-1)") Lecture 5 1.8.1 FIR Filters FIR filters have impulse responses of finite lengths. In FIR filters the present output depends only on the past and present values of the input sequence but not on the previous
Lecture 5 1.8.1 FIR Filters FIR filters have impulse responses of finite lengths. In FIR filters the present output depends only on the past and present values of the input sequence but not on the previous
EC6502 PRINCIPLES OF DIGITAL SIGNAL PROCESSING
 1. State the properties of DFT? UNIT-I DISCRETE FOURIER TRANSFORM 1) Periodicity 2) Linearity and symmetry 3) Multiplication of two DFTs 4) Circular convolution 5) Time reversal 6) Circular time shift
1. State the properties of DFT? UNIT-I DISCRETE FOURIER TRANSFORM 1) Periodicity 2) Linearity and symmetry 3) Multiplication of two DFTs 4) Circular convolution 5) Time reversal 6) Circular time shift
8: IIR Filter Transformations
 DSP and Digital (5-677) IIR : 8 / Classical continuous-time filters optimize tradeoff: passband ripple v stopband ripple v transition width There are explicit formulae for pole/zero positions. Butterworth:
DSP and Digital (5-677) IIR : 8 / Classical continuous-time filters optimize tradeoff: passband ripple v stopband ripple v transition width There are explicit formulae for pole/zero positions. Butterworth:
Digital Filtering: Realization
 Digital Filtering: Realization Digital Filtering: Matlab Implementation: 3-tap (2 nd order) IIR filter 1 Transfer Function Differential Equation: z- Transform: Transfer Function: 2 Example: Transfer Function
Digital Filtering: Realization Digital Filtering: Matlab Implementation: 3-tap (2 nd order) IIR filter 1 Transfer Function Differential Equation: z- Transform: Transfer Function: 2 Example: Transfer Function
Signals and Filtering
 FILTERING OBJECTIVES The objectives of this lecture are to: Introduce signal filtering concepts Introduce filter performance criteria Introduce Finite Impulse Response (FIR) filters Introduce Infinite
FILTERING OBJECTIVES The objectives of this lecture are to: Introduce signal filtering concepts Introduce filter performance criteria Introduce Finite Impulse Response (FIR) filters Introduce Infinite
CS3291: Digital Signal Processing
 CS39 Exam Jan 005 //08 /BMGC University of Manchester Department of Computer Science First Semester Year 3 Examination Paper CS39: Digital Signal Processing Date of Examination: January 005 Answer THREE
CS39 Exam Jan 005 //08 /BMGC University of Manchester Department of Computer Science First Semester Year 3 Examination Paper CS39: Digital Signal Processing Date of Examination: January 005 Answer THREE
Multirate Digital Signal Processing
 Multirate Digital Signal Processing Basic Sampling Rate Alteration Devices Up-sampler - Used to increase the sampling rate by an integer factor Down-sampler - Used to increase the sampling rate by an integer
Multirate Digital Signal Processing Basic Sampling Rate Alteration Devices Up-sampler - Used to increase the sampling rate by an integer factor Down-sampler - Used to increase the sampling rate by an integer
B.Tech III Year II Semester (R13) Regular & Supplementary Examinations May/June 2017 DIGITAL SIGNAL PROCESSING (Common to ECE and EIE)
 Regular & Supplementary Examinations May/June 2017 DIGITAL SIGNAL PROCESSING (Common to ECE and EIE)") Code: 13A04602 R13 B.Tech III Year II Semester (R13) Regular & Supplementary Examinations May/June 2017 (Common to ECE and EIE) PART A (Compulsory Question) 1 Answer the following: (10 X 02 = 20 Marks)
Code: 13A04602 R13 B.Tech III Year II Semester (R13) Regular & Supplementary Examinations May/June 2017 (Common to ECE and EIE) PART A (Compulsory Question) 1 Answer the following: (10 X 02 = 20 Marks)
Design of infinite impulse response (IIR) bandpass filter structure using particle swarm optimization
 bandpass filter structure using particle swarm optimization") Standard Scientific Research and Essays Vol1 (1): 1-8, February 13 http://www.standresjournals.org/journals/ssre Research Article Design of infinite impulse response (IIR) bandpass filter structure using
Standard Scientific Research and Essays Vol1 (1): 1-8, February 13 http://www.standresjournals.org/journals/ssre Research Article Design of infinite impulse response (IIR) bandpass filter structure using
Computer-Aided Design (CAD) of Recursive/Non-Recursive Filters
 of Recursive/Non-Recursive Filters") Paper ID #12370 Computer-Aided Design (CAD) of Recursive/Non-Recursive Filters Chengying Xu, Florida State University Dr. Chengying Xu received the Ph.D. in 2006 in mechanical engineering from Purdue University,
Paper ID #12370 Computer-Aided Design (CAD) of Recursive/Non-Recursive Filters Chengying Xu, Florida State University Dr. Chengying Xu received the Ph.D. in 2006 in mechanical engineering from Purdue University,
Outline. Discrete time signals. Impulse sampling z-transform Frequency response Stability INF4420. Jørgen Andreas Michaelsen Spring / 37 2 / 37
 INF4420 Discrete time signals Jørgen Andreas Michaelsen Spring 2013 1 / 37 Outline Impulse sampling z-transform Frequency response Stability Spring 2013 Discrete time signals 2 2 / 37 Introduction More
INF4420 Discrete time signals Jørgen Andreas Michaelsen Spring 2013 1 / 37 Outline Impulse sampling z-transform Frequency response Stability Spring 2013 Discrete time signals 2 2 / 37 Introduction More
(i) Understanding of the characteristics of linear-phase finite impulse response (FIR) filters
 Understanding of the characteristics of linear-phase finite impulse response (FIR) filters") FIR Filter Design Chapter Intended Learning Outcomes: (i) Understanding of the characteristics of linear-phase finite impulse response (FIR) filters (ii) Ability to design linear-phase FIR filters according
FIR Filter Design Chapter Intended Learning Outcomes: (i) Understanding of the characteristics of linear-phase finite impulse response (FIR) filters (ii) Ability to design linear-phase FIR filters according
Final Exam. EE313 Signals and Systems. Fall 1999, Prof. Brian L. Evans, Unique No
 Final Exam EE313 Signals and Systems Fall 1999, Prof. Brian L. Evans, Unique No. 14510 December 11, 1999 The exam is scheduled to last 50 minutes. Open books and open notes. You may refer to your homework
Final Exam EE313 Signals and Systems Fall 1999, Prof. Brian L. Evans, Unique No. 14510 December 11, 1999 The exam is scheduled to last 50 minutes. Open books and open notes. You may refer to your homework
Multirate DSP, part 1: Upsampling and downsampling
 Multirate DSP, part 1: Upsampling and downsampling Li Tan - April 21, 2008 Order this book today at www.elsevierdirect.com or by calling 1-800-545-2522 and receive an additional 20% discount. Use promotion
Multirate DSP, part 1: Upsampling and downsampling Li Tan - April 21, 2008 Order this book today at www.elsevierdirect.com or by calling 1-800-545-2522 and receive an additional 20% discount. Use promotion
Filters. Phani Chavali
 Filters Phani Chavali Filters Filtering is the most common signal processing procedure. Used as echo cancellers, equalizers, front end processing in RF receivers Used for modifying input signals by passing
Filters Phani Chavali Filters Filtering is the most common signal processing procedure. Used as echo cancellers, equalizers, front end processing in RF receivers Used for modifying input signals by passing
Module 3 : Sampling and Reconstruction Problem Set 3
 Module 3 : Sampling and Reconstruction Problem Set 3 Problem 1 Shown in figure below is a system in which the sampling signal is an impulse train with alternating sign. The sampling signal p(t), the Fourier
Module 3 : Sampling and Reconstruction Problem Set 3 Problem 1 Shown in figure below is a system in which the sampling signal is an impulse train with alternating sign. The sampling signal p(t), the Fourier
GEORGIA INSTITUTE OF TECHNOLOGY. SCHOOL of ELECTRICAL and COMPUTER ENGINEERING. ECE 2026 Summer 2018 Lab #8: Filter Design of FIR Filters
 GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL and COMPUTER ENGINEERING ECE 2026 Summer 2018 Lab #8: Filter Design of FIR Filters Date: 19. Jul 2018 Pre-Lab: You should read the Pre-Lab section of
GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL and COMPUTER ENGINEERING ECE 2026 Summer 2018 Lab #8: Filter Design of FIR Filters Date: 19. Jul 2018 Pre-Lab: You should read the Pre-Lab section of
Chapter-2 SAMPLING PROCESS
 Chapter-2 SAMPLING PROCESS SAMPLING: A message signal may originate from a digital or analog source. If the message signal is analog in nature, then it has to be converted into digital form before it can
Chapter-2 SAMPLING PROCESS SAMPLING: A message signal may originate from a digital or analog source. If the message signal is analog in nature, then it has to be converted into digital form before it can
 UNIT IV FIR FILTER DESIGN 1. How phase distortion and delay distortion are introduced? The phase distortion is introduced when the phase characteristics of a filter is nonlinear within the desired frequency
UNIT IV FIR FILTER DESIGN 1. How phase distortion and delay distortion are introduced? The phase distortion is introduced when the phase characteristics of a filter is nonlinear within the desired frequency
ECE438 - Laboratory 7a: Digital Filter Design (Week 1) By Prof. Charles Bouman and Prof. Mireille Boutin Fall 2015
 By Prof. Charles Bouman and Prof. Mireille Boutin Fall 2015") Purdue University: ECE438 - Digital Signal Processing with Applications 1 ECE438 - Laboratory 7a: Digital Filter Design (Week 1) By Prof. Charles Bouman and Prof. Mireille Boutin Fall 2015 1 Introduction
Purdue University: ECE438 - Digital Signal Processing with Applications 1 ECE438 - Laboratory 7a: Digital Filter Design (Week 1) By Prof. Charles Bouman and Prof. Mireille Boutin Fall 2015 1 Introduction
EE 311 February 13 and 15, 2019 Lecture 10
 EE 311 February 13 and 15, 219 Lecture 1 Figure 4.22 The top figure shows a quantized sinusoid as the darker stair stepped curve. The bottom figure shows the quantization error. The quantized signal to
EE 311 February 13 and 15, 219 Lecture 1 Figure 4.22 The top figure shows a quantized sinusoid as the darker stair stepped curve. The bottom figure shows the quantization error. The quantized signal to
(i) Understanding of the characteristics of linear-phase finite impulse response (FIR) filters
 Understanding of the characteristics of linear-phase finite impulse response (FIR) filters") FIR Filter Design Chapter Intended Learning Outcomes: (i) Understanding of the characteristics of linear-phase finite impulse response (FIR) filters (ii) Ability to design linear-phase FIR filters according
FIR Filter Design Chapter Intended Learning Outcomes: (i) Understanding of the characteristics of linear-phase finite impulse response (FIR) filters (ii) Ability to design linear-phase FIR filters according
Design IIR Filters Using Cascaded Biquads
 Design IIR Filters Using Cascaded Biquads This article shows how to implement a Butterworth IIR lowpass filter as a cascade of second-order IIR filters, or biquads. We ll derive how to calculate the coefficients
Design IIR Filters Using Cascaded Biquads This article shows how to implement a Butterworth IIR lowpass filter as a cascade of second-order IIR filters, or biquads. We ll derive how to calculate the coefficients
Signals and Systems Lecture 6: Fourier Applications
 Signals and Systems Lecture 6: Fourier Applications Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2012 arzaneh Abdollahi Signal and Systems Lecture 6
Signals and Systems Lecture 6: Fourier Applications Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2012 arzaneh Abdollahi Signal and Systems Lecture 6
Digital Filters IIR (& Their Corresponding Analog Filters) 4 April 2017 ELEC 3004: Systems 1. Week Date Lecture Title
 4 April 2017 ELEC 3004: Systems 1. Week Date Lecture Title") http://elec3004.com Digital Filters IIR (& Their Corresponding Analog Filters) 4 April 017 ELEC 3004: Systems 1 017 School of Information Technology and Electrical Engineering at The University of Queensland
http://elec3004.com Digital Filters IIR (& Their Corresponding Analog Filters) 4 April 017 ELEC 3004: Systems 1 017 School of Information Technology and Electrical Engineering at The University of Queensland
The University of Texas at Austin Dept. of Electrical and Computer Engineering Midterm #2
 The University of Texas at Austin Dept. of Electrical and Computer Engineering Midterm #2 Date: November 18, 2010 Course: EE 313 Evans Name: Last, First The exam is scheduled to last 75 minutes. Open books
The University of Texas at Austin Dept. of Electrical and Computer Engineering Midterm #2 Date: November 18, 2010 Course: EE 313 Evans Name: Last, First The exam is scheduled to last 75 minutes. Open books
DSP Laboratory (EELE 4110) Lab#10 Finite Impulse Response (FIR) Filters
 Lab#10 Finite Impulse Response (FIR) Filters") Islamic University of Gaza OBJECTIVES: Faculty of Engineering Electrical Engineering Department Spring-2011 DSP Laboratory (EELE 4110) Lab#10 Finite Impulse Response (FIR) Filters To demonstrate the concept
Islamic University of Gaza OBJECTIVES: Faculty of Engineering Electrical Engineering Department Spring-2011 DSP Laboratory (EELE 4110) Lab#10 Finite Impulse Response (FIR) Filters To demonstrate the concept
ECE 301, final exam of the session of Prof. Chih-Chun Wang Saturday 10:20am 12:20pm, December 20, 2008, STEW 130,
 ECE 301, final exam of the session of Prof. Chih-Chun Wang Saturday 10:20am 12:20pm, December 20, 2008, STEW 130, 1. Enter your name, student ID number, e-mail address, and signature in the space provided
ECE 301, final exam of the session of Prof. Chih-Chun Wang Saturday 10:20am 12:20pm, December 20, 2008, STEW 130, 1. Enter your name, student ID number, e-mail address, and signature in the space provided
Signal Processing Summary
 Signal Processing Summary Jan Černocký, Valentina Hubeika {cernocky,ihubeika}@fit.vutbr.cz DCGM FIT BUT Brno, ihubeika@fit.vutbr.cz FIT BUT Brno Signal Processing Summary Jan Černocký, Valentina Hubeika,
Signal Processing Summary Jan Černocký, Valentina Hubeika {cernocky,ihubeika}@fit.vutbr.cz DCGM FIT BUT Brno, ihubeika@fit.vutbr.cz FIT BUT Brno Signal Processing Summary Jan Černocký, Valentina Hubeika,
ECE 203 LAB 2 PRACTICAL FILTER DESIGN & IMPLEMENTATION
 Version 1. 1 of 7 ECE 03 LAB PRACTICAL FILTER DESIGN & IMPLEMENTATION BEFORE YOU BEGIN PREREQUISITE LABS ECE 01 Labs ECE 0 Advanced MATLAB ECE 03 MATLAB Signals & Systems EXPECTED KNOWLEDGE Understanding
Version 1. 1 of 7 ECE 03 LAB PRACTICAL FILTER DESIGN & IMPLEMENTATION BEFORE YOU BEGIN PREREQUISITE LABS ECE 01 Labs ECE 0 Advanced MATLAB ECE 03 MATLAB Signals & Systems EXPECTED KNOWLEDGE Understanding
Signals and Systems Lecture 6: Fourier Applications
 Signals and Systems Lecture 6: Fourier Applications Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2012 arzaneh Abdollahi Signal and Systems Lecture 6
Signals and Systems Lecture 6: Fourier Applications Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2012 arzaneh Abdollahi Signal and Systems Lecture 6
F I R Filter (Finite Impulse Response)
") F I R Filter (Finite Impulse Response) Ir. Dadang Gunawan, Ph.D Electrical Engineering University of Indonesia The Outline 7.1 State-of-the-art 7.2 Type of Linear Phase Filter 7.3 Summary of 4 Types FIR
F I R Filter (Finite Impulse Response) Ir. Dadang Gunawan, Ph.D Electrical Engineering University of Indonesia The Outline 7.1 State-of-the-art 7.2 Type of Linear Phase Filter 7.3 Summary of 4 Types FIR
Experiment 4- Finite Impulse Response Filters
 Experiment 4- Finite Impulse Response Filters 18 February 2009 Abstract In this experiment we design different Finite Impulse Response filters and study their characteristics. 1 Introduction The transfer
Experiment 4- Finite Impulse Response Filters 18 February 2009 Abstract In this experiment we design different Finite Impulse Response filters and study their characteristics. 1 Introduction The transfer
Final Exam Practice Questions for Music 421, with Solutions
 Final Exam Practice Questions for Music 4, with Solutions Elementary Fourier Relationships. For the window w = [/,,/ ], what is (a) the dc magnitude of the window transform? + (b) the magnitude at half
Final Exam Practice Questions for Music 4, with Solutions Elementary Fourier Relationships. For the window w = [/,,/ ], what is (a) the dc magnitude of the window transform? + (b) the magnitude at half
ECE 421 Introduction to Signal Processing
 ECE 421 Introduction to Signal Processing Dror Baron Assistant Professor Dept. of Electrical and Computer Engr. North Carolina State University, NC, USA Digital Filter Design [Reading material: Chapter
ECE 421 Introduction to Signal Processing Dror Baron Assistant Professor Dept. of Electrical and Computer Engr. North Carolina State University, NC, USA Digital Filter Design [Reading material: Chapter
Signal Processing. Naureen Ghani. December 9, 2017
 Signal Processing Naureen Ghani December 9, 27 Introduction Signal processing is used to enhance signal components in noisy measurements. It is especially important in analyzing time-series data in neuroscience.
Signal Processing Naureen Ghani December 9, 27 Introduction Signal processing is used to enhance signal components in noisy measurements. It is especially important in analyzing time-series data in neuroscience.
The University of Texas at Austin Dept. of Electrical and Computer Engineering Midterm #1
 The University of Texas at Austin Dept. of Electrical and Computer Engineering Midterm #1 Date: October 18, 2013 Course: EE 445S Evans Name: Last, First The exam is scheduled to last 50 minutes. Open books
The University of Texas at Austin Dept. of Electrical and Computer Engineering Midterm #1 Date: October 18, 2013 Course: EE 445S Evans Name: Last, First The exam is scheduled to last 50 minutes. Open books
Lecture 3 Review of Signals and Systems: Part 2. EE4900/EE6720 Digital Communications
 EE4900/EE6720: Digital Communications 1 Lecture 3 Review of Signals and Systems: Part 2 Block Diagrams of Communication System Digital Communication System 2 Informatio n (sound, video, text, data, ) Transducer
EE4900/EE6720: Digital Communications 1 Lecture 3 Review of Signals and Systems: Part 2 Block Diagrams of Communication System Digital Communication System 2 Informatio n (sound, video, text, data, ) Transducer
ECSE-4760 Computer Applications Laboratory DIGITAL FILTER DESIGN
 Rensselaer Polytechnic Institute ECSE-4760 Computer Applications Laboratory DIGITAL FILTER DESIGN Number of Sessions 4 INTRODUCTION This lab demonstrates the use of digital filters on a DSP. It consists
Rensselaer Polytechnic Institute ECSE-4760 Computer Applications Laboratory DIGITAL FILTER DESIGN Number of Sessions 4 INTRODUCTION This lab demonstrates the use of digital filters on a DSP. It consists
PYKC 27 Feb 2017 EA2.3 Electronics 2 Lecture PYKC 27 Feb 2017 EA2.3 Electronics 2 Lecture 11-2
 In this lecture, I will introduce the mathematical model for discrete time signals as sequence of samples. You will also take a first look at a useful alternative representation of discrete signals known
In this lecture, I will introduce the mathematical model for discrete time signals as sequence of samples. You will also take a first look at a useful alternative representation of discrete signals known
Islamic University of Gaza. Faculty of Engineering Electrical Engineering Department Spring-2011
 Islamic University of Gaza Faculty of Engineering Electrical Engineering Department Spring-2011 DSP Laboratory (EELE 4110) Lab#4 Sampling and Quantization OBJECTIVES: When you have completed this assignment,
Islamic University of Gaza Faculty of Engineering Electrical Engineering Department Spring-2011 DSP Laboratory (EELE 4110) Lab#4 Sampling and Quantization OBJECTIVES: When you have completed this assignment,
Filter Banks I. Prof. Dr. Gerald Schuller. Fraunhofer IDMT & Ilmenau University of Technology Ilmenau, Germany. Fraunhofer IDMT
 Filter Banks I Prof. Dr. Gerald Schuller Fraunhofer IDMT & Ilmenau University of Technology Ilmenau, Germany 1 Structure of perceptual Audio Coders Encoder Decoder 2 Filter Banks essential element of most
Filter Banks I Prof. Dr. Gerald Schuller Fraunhofer IDMT & Ilmenau University of Technology Ilmenau, Germany 1 Structure of perceptual Audio Coders Encoder Decoder 2 Filter Banks essential element of most
PROBLEM SET 6. Note: This version is preliminary in that it does not yet have instructions for uploading the MATLAB problems.
 PROBLEM SET 6 Issued: 2/32/19 Due: 3/1/19 Reading: During the past week we discussed change of discrete-time sampling rate, introducing the techniques of decimation and interpolation, which is covered
PROBLEM SET 6 Issued: 2/32/19 Due: 3/1/19 Reading: During the past week we discussed change of discrete-time sampling rate, introducing the techniques of decimation and interpolation, which is covered
II Year (04 Semester) EE6403 Discrete Time Systems and Signal Processing
 EE6403 Discrete Time Systems and Signal Processing") Class Subject Code Subject II Year (04 Semester) EE6403 Discrete Time Systems and Signal Processing 1.CONTENT LIST: Introduction to Unit I - Signals and Systems 2. SKILLS ADDRESSED: Listening 3. OBJECTIVE
Class Subject Code Subject II Year (04 Semester) EE6403 Discrete Time Systems and Signal Processing 1.CONTENT LIST: Introduction to Unit I - Signals and Systems 2. SKILLS ADDRESSED: Listening 3. OBJECTIVE
Design IIR Band-Reject Filters
 db Design IIR Band-Reject Filters In this post, I show how to design IIR Butterworth band-reject filters, and provide two Matlab functions for band-reject filter synthesis. Earlier posts covered IIR Butterworth
db Design IIR Band-Reject Filters In this post, I show how to design IIR Butterworth band-reject filters, and provide two Matlab functions for band-reject filter synthesis. Earlier posts covered IIR Butterworth
Corso di DATI e SEGNALI BIOMEDICI 1. Carmelina Ruggiero Laboratorio MedInfo
 Corso di DATI e SEGNALI BIOMEDICI 1 Carmelina Ruggiero Laboratorio MedInfo Digital Filters Function of a Filter In signal processing, the functions of a filter are: to remove unwanted parts of the signal,
Corso di DATI e SEGNALI BIOMEDICI 1 Carmelina Ruggiero Laboratorio MedInfo Digital Filters Function of a Filter In signal processing, the functions of a filter are: to remove unwanted parts of the signal,
EELE503. Modern filter design. Filter Design - Introduction
 EELE503 Modern filter design Filter Design - Introduction A filter will modify the magnitude or phase of a signal to produce a desired frequency response or time response. One way to classify ideal filters
EELE503 Modern filter design Filter Design - Introduction A filter will modify the magnitude or phase of a signal to produce a desired frequency response or time response. One way to classify ideal filters
Analog Filters D R. T A R E K T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N
 Analog Filters D. T A E K T U T U N J I P H I L A D E L P H I A U N I V E S I T Y, J O D A N 2 0 4 Introduction Electrical filters are deigned to eliminate unwanted frequencies Filters can be classified
Analog Filters D. T A E K T U T U N J I P H I L A D E L P H I A U N I V E S I T Y, J O D A N 2 0 4 Introduction Electrical filters are deigned to eliminate unwanted frequencies Filters can be classified
ECE503 Homework Assignment Number 8 Solution
 ECE53 Homework Assignment Number 8 Solution 1. 3 points. Recall that an analog integrator has transfer function H a (s) = 1 s. Use the bilinear transform to find the digital transfer function G(z) from
ECE53 Homework Assignment Number 8 Solution 1. 3 points. Recall that an analog integrator has transfer function H a (s) = 1 s. Use the bilinear transform to find the digital transfer function G(z) from
APPLIED SIGNAL PROCESSING
 APPLIED SIGNAL PROCESSING 2004 Chapter 1 Digital filtering In this section digital filters are discussed, with a focus on IIR (Infinite Impulse Response) filters and their applications. The most important
APPLIED SIGNAL PROCESSING 2004 Chapter 1 Digital filtering In this section digital filters are discussed, with a focus on IIR (Infinite Impulse Response) filters and their applications. The most important
DIGITAL FILTERS. !! Finite Impulse Response (FIR) !! Infinite Impulse Response (IIR) !! Background. !! Matlab functions AGC DSP AGC DSP
 !! Infinite Impulse Response (IIR) !! Background. !! Matlab functions AGC DSP AGC DSP") DIGITAL FILTERS!! Finite Impulse Response (FIR)!! Infinite Impulse Response (IIR)!! Background!! Matlab functions 1!! Only the magnitude approximation problem!! Four basic types of ideal filters with magnitude
DIGITAL FILTERS!! Finite Impulse Response (FIR)!! Infinite Impulse Response (IIR)!! Background!! Matlab functions 1!! Only the magnitude approximation problem!! Four basic types of ideal filters with magnitude
EEO 401 Digital Signal Processing Prof. Mark Fowler
 EEO 4 Digital Signal Processing Prof. Mark Fowler Note Set #34 IIR Design Characteristics of Common Analog Filters Reading: Sect..3.4 &.3.5 of Proakis & Manolakis /6 Motivation We ve seenthat the Bilinear
EEO 4 Digital Signal Processing Prof. Mark Fowler Note Set #34 IIR Design Characteristics of Common Analog Filters Reading: Sect..3.4 &.3.5 of Proakis & Manolakis /6 Motivation We ve seenthat the Bilinear
ECE 5650/4650 Exam II November 20, 2018 Name:
 ECE 5650/4650 Exam II November 0, 08 Name: Take-Home Exam Honor Code This being a take-home exam a strict honor code is assumed. Each person is to do his/her own work. Bring any questions you have about
ECE 5650/4650 Exam II November 0, 08 Name: Take-Home Exam Honor Code This being a take-home exam a strict honor code is assumed. Each person is to do his/her own work. Bring any questions you have about
Discretization of Continuous Controllers
 Discretization of Continuous Controllers Thao Dang VERIMAG, CNRS (France) Discretization of Continuous Controllers One way to design a computer-controlled control system is to make a continuous-time design
Discretization of Continuous Controllers Thao Dang VERIMAG, CNRS (France) Discretization of Continuous Controllers One way to design a computer-controlled control system is to make a continuous-time design
16.30 Learning Objectives and Practice Problems - - Lectures 16 through 20
 16.30 Learning Objectives and Practice Problems - - Lectures 16 through 20 IV. Lectures 16-20 IVA : Sampling, Aliasing, and Reconstruction JVV 9.5, Lecture Notes on Shannon - Understand the mathematical
16.30 Learning Objectives and Practice Problems - - Lectures 16 through 20 IV. Lectures 16-20 IVA : Sampling, Aliasing, and Reconstruction JVV 9.5, Lecture Notes on Shannon - Understand the mathematical
Design and comparison of butterworth and chebyshev type-1 low pass filter using Matlab
 Research Cell: An International Journal of Engineering Sciences ISSN: 2229-6913 Issue Sept 2011, Vol. 4 423 Design and comparison of butterworth and chebyshev type-1 low pass filter using Matlab Tushar
Research Cell: An International Journal of Engineering Sciences ISSN: 2229-6913 Issue Sept 2011, Vol. 4 423 Design and comparison of butterworth and chebyshev type-1 low pass filter using Matlab Tushar
SKP Engineering College
 SKP Engineering College Tiruvannamalai 606611 A Course Material on Principles Of Digital Signal Processing By R.Rajesh Assistant Professor Electronics and Communication Engineering Department Electronics
SKP Engineering College Tiruvannamalai 606611 A Course Material on Principles Of Digital Signal Processing By R.Rajesh Assistant Professor Electronics and Communication Engineering Department Electronics
Rahman Jamal, et. al.. "Filters." Copyright 2000 CRC Press LLC. <
 Rahman Jamal, et. al.. "Filters." Copyright 000 CRC Press LLC. . Filters Rahman Jamal National Instruments Germany Robert Steer Frequency Devices 8. Introduction 8. Filter Classification
Rahman Jamal, et. al.. "Filters." Copyright 000 CRC Press LLC. . Filters Rahman Jamal National Instruments Germany Robert Steer Frequency Devices 8. Introduction 8. Filter Classification
ESE531 Spring University of Pennsylvania Department of Electrical and System Engineering Digital Signal Processing
 University of Pennsylvania Department of Electrical and System Engineering Digital Signal Processing ESE531, Spring 2017 Final Project: Audio Equalization Wednesday, Apr. 5 Due: Tuesday, April 25th, 11:59pm
University of Pennsylvania Department of Electrical and System Engineering Digital Signal Processing ESE531, Spring 2017 Final Project: Audio Equalization Wednesday, Apr. 5 Due: Tuesday, April 25th, 11:59pm
Continuous-Time Analog Filters
 ENGR 4333/5333: Digital Signal Processing Continuous-Time Analog Filters Chapter 2 Dr. Mohamed Bingabr University of Central Oklahoma Outline Frequency Response of an LTIC System Signal Transmission through
ENGR 4333/5333: Digital Signal Processing Continuous-Time Analog Filters Chapter 2 Dr. Mohamed Bingabr University of Central Oklahoma Outline Frequency Response of an LTIC System Signal Transmission through
Digital Filter Design
 Chapter9 Digital Filter Design Contents 9.1 Overview of Approximation Techniques........ 9-3 9.1.1 Approximation Approaches........... 9-3 9.1.2 FIR Approximation Approaches......... 9-3 9.2 Continuous-Time
Chapter9 Digital Filter Design Contents 9.1 Overview of Approximation Techniques........ 9-3 9.1.1 Approximation Approaches........... 9-3 9.1.2 FIR Approximation Approaches......... 9-3 9.2 Continuous-Time
Team proposals are due tomorrow at 6PM Homework 4 is due next thur. Proposal presentations are next mon in 1311EECS.
 Lecture 8 Today: Announcements: References: FIR filter design IIR filter design Filter roundoff and overflow sensitivity Team proposals are due tomorrow at 6PM Homework 4 is due next thur. Proposal presentations
Lecture 8 Today: Announcements: References: FIR filter design IIR filter design Filter roundoff and overflow sensitivity Team proposals are due tomorrow at 6PM Homework 4 is due next thur. Proposal presentations
Design IIR Filter using MATLAB
 International Journal of Science, Engineering and Technology Research (IJSETR), Volume 4, Issue 2, December 25 Design IIR Filter using MATLAB RainuArya Abstract in Digital Signal Processing (DSP), most
International Journal of Science, Engineering and Technology Research (IJSETR), Volume 4, Issue 2, December 25 Design IIR Filter using MATLAB RainuArya Abstract in Digital Signal Processing (DSP), most
Digital Signal Processing
 Digital Signal Processing Theory, Analysis and Digital-filter Design B. Somanathan Nair DIGITAL SIGNAL PROCESSING Theory, Analysis and Digital-filter Design B. SOMANATHAN NAIR Principal SHM Engineering
Digital Signal Processing Theory, Analysis and Digital-filter Design B. Somanathan Nair DIGITAL SIGNAL PROCESSING Theory, Analysis and Digital-filter Design B. SOMANATHAN NAIR Principal SHM Engineering
Digital Signal Processing
 Digital Signal Processing System Analysis and Design Paulo S. R. Diniz Eduardo A. B. da Silva and Sergio L. Netto Federal University of Rio de Janeiro CAMBRIDGE UNIVERSITY PRESS Preface page xv Introduction
Digital Signal Processing System Analysis and Design Paulo S. R. Diniz Eduardo A. B. da Silva and Sergio L. Netto Federal University of Rio de Janeiro CAMBRIDGE UNIVERSITY PRESS Preface page xv Introduction
Filter Approximation Concepts
 6 (ESS) Filter Approximation Concepts How do you translate filter specifications into a mathematical expression which can be synthesized? Approximation Techniques Why an ideal Brick Wall Filter can not
6 (ESS) Filter Approximation Concepts How do you translate filter specifications into a mathematical expression which can be synthesized? Approximation Techniques Why an ideal Brick Wall Filter can not
Brief Introduction to Signals & Systems. Phani Chavali
 Brief Introduction to Signals & Systems Phani Chavali Outline Signals & Systems Continuous and discrete time signals Properties of Systems Input- Output relation : Convolution Frequency domain representation
Brief Introduction to Signals & Systems Phani Chavali Outline Signals & Systems Continuous and discrete time signals Properties of Systems Input- Output relation : Convolution Frequency domain representation
Digital Filters IIR (& Their Corresponding Analog Filters) Week Date Lecture Title
 Week Date Lecture Title") http://elec3004.com Digital Filters IIR (& Their Corresponding Analog Filters) 2017 School of Information Technology and Electrical Engineering at The University of Queensland Lecture Schedule: Week Date
http://elec3004.com Digital Filters IIR (& Their Corresponding Analog Filters) 2017 School of Information Technology and Electrical Engineering at The University of Queensland Lecture Schedule: Week Date
ECE 429 / 529 Digital Signal Processing
 ECE 429 / 529 Course Policy & Syllabus R. N. Strickland SYLLABUS ECE 429 / 529 Digital Signal Processing SPRING 2009 I. Introduction DSP is concerned with the digital representation of signals and the
ECE 429 / 529 Course Policy & Syllabus R. N. Strickland SYLLABUS ECE 429 / 529 Digital Signal Processing SPRING 2009 I. Introduction DSP is concerned with the digital representation of signals and the
Window Method. designates the window function. Commonly used window functions in FIR filters. are: 1. Rectangular Window:
 Window Method We have seen that in the design of FIR filters, Gibbs oscillations are produced in the passband and stopband, which are not desirable features of the FIR filter. To solve this problem, window
Window Method We have seen that in the design of FIR filters, Gibbs oscillations are produced in the passband and stopband, which are not desirable features of the FIR filter. To solve this problem, window
IJSER. Chen [2] has gave a lot of information in digital filtering with additions in the area of computer-aided design of digital filters.
![IJSER. Chen [2] has gave a lot of information in digital filtering with additions in the area of computer-aided design of digital filters.](/thumbs/76/73712642.jpg "IJSER. Chen [2] has gave a lot of information in digital filtering with additions in the area of computer-aided design of digital filters.") Computer-Aided Design using New Algorithms for nth Order Chebyshev Digital Filter Haider Fakher Radhi Al-Saidy Computer Teaching Unit, Medicine of Community Branch, Al-Kindy Medicine College Baghdad University,
Computer-Aided Design using New Algorithms for nth Order Chebyshev Digital Filter Haider Fakher Radhi Al-Saidy Computer Teaching Unit, Medicine of Community Branch, Al-Kindy Medicine College Baghdad University,
Lecture 2 Review of Signals and Systems: Part 1. EE4900/EE6720 Digital Communications
 EE4900/EE6420: Digital Communications 1 Lecture 2 Review of Signals and Systems: Part 1 Block Diagrams of Communication System Digital Communication System 2 Informatio n (sound, video, text, data, ) Transducer
EE4900/EE6420: Digital Communications 1 Lecture 2 Review of Signals and Systems: Part 1 Block Diagrams of Communication System Digital Communication System 2 Informatio n (sound, video, text, data, ) Transducer
Copyright S. K. Mitra
 1 In many applications, a discrete-time signal x[n] is split into a number of subband signals by means of an analysis filter bank The subband signals are then processed Finally, the processed subband signals
1 In many applications, a discrete-time signal x[n] is split into a number of subband signals by means of an analysis filter bank The subband signals are then processed Finally, the processed subband signals
ELEC3104: Digital Signal Processing Session 1, 2013
 ELEC3104: Digital Signal Processing Session 1, 2013 The University of New South Wales School of Electrical Engineering and Telecommunications LABORATORY 4: DIGITAL FILTERS INTRODUCTION In this laboratory,
ELEC3104: Digital Signal Processing Session 1, 2013 The University of New South Wales School of Electrical Engineering and Telecommunications LABORATORY 4: DIGITAL FILTERS INTRODUCTION In this laboratory,
ijdsp Workshop: Exercise 2012 DSP Exercise Objectives
 Objectives DSP Exercise The objective of this exercise is to provide hands-on experiences on ijdsp. It consists of three parts covering frequency response of LTI systems, pole/zero locations with the frequency
Objectives DSP Exercise The objective of this exercise is to provide hands-on experiences on ijdsp. It consists of three parts covering frequency response of LTI systems, pole/zero locations with the frequency
Laboratory Assignment 4. Fourier Sound Synthesis
 Laboratory Assignment 4 Fourier Sound Synthesis PURPOSE This lab investigates how to use a computer to evaluate the Fourier series for periodic signals and to synthesize audio signals from Fourier series
Laboratory Assignment 4 Fourier Sound Synthesis PURPOSE This lab investigates how to use a computer to evaluate the Fourier series for periodic signals and to synthesize audio signals from Fourier series
EEM478-WEEK8 Finite Impulse Response (FIR) Filters
 Filters") EEM478-WEEK8 Finite Impulse Response (FIR) Filters Learning Objectives Introduction to the theory behind FIR filters: Properties (including aliasing). Coefficient calculation. Structure selection. Implementation
EEM478-WEEK8 Finite Impulse Response (FIR) Filters Learning Objectives Introduction to the theory behind FIR filters: Properties (including aliasing). Coefficient calculation. Structure selection. Implementation
Sampling and Reconstruction of Analog Signals
 Sampling and Reconstruction of Analog Signals Chapter Intended Learning Outcomes: (i) Ability to convert an analog signal to a discrete-time sequence via sampling (ii) Ability to construct an analog signal
Sampling and Reconstruction of Analog Signals Chapter Intended Learning Outcomes: (i) Ability to convert an analog signal to a discrete-time sequence via sampling (ii) Ability to construct an analog signal
Speech, music, images, and video are examples of analog signals. Each of these signals is characterized by its bandwidth, dynamic range, and the
 Speech, music, images, and video are examples of analog signals. Each of these signals is characterized by its bandwidth, dynamic range, and the nature of the signal. For instance, in the case of audio
Speech, music, images, and video are examples of analog signals. Each of these signals is characterized by its bandwidth, dynamic range, and the nature of the signal. For instance, in the case of audio
ECE 5650/4650 MATLAB Project 1
 This project is to be treated as a take-home exam, meaning each student is to due his/her own work. The project due date is 4:30 PM Tuesday, October 18, 2011. To work the project you will need access to
This project is to be treated as a take-home exam, meaning each student is to due his/her own work. The project due date is 4:30 PM Tuesday, October 18, 2011. To work the project you will need access to