Biological Inspirations for Distributed Robotics. Dr. Daisy Tang
|
|
|
- Martin Short
- 5 years ago
- Views:
Transcription
1 Biological Inspirations for Distributed Robotics Dr. Daisy Tang
2 Outline Biological inspirations Understand two types of biological parallels Understand key ideas for distributed robotics obtained from study of biological systems Understand concept of stigmergy Understand use of stigmergy for tasks in collective robotics
3 Biology vs. Multi-Robot Teams
4 Movies of Some Animal Collectives School of fish Flock of birds Etc.
5 Why Biological Systems? Key reasons: Animal behavior defines intelligence Animal behavior provides existence proof that intelligence is achievable Typical objects of study: Ants Bees Birds Fish Herding animals

6 A Broad Classification of Animal Societies (Tinbergen, 1953)


7 Societies that Differentiate Innate differentiation of blood relatives Strict division of work and social interaction Individuals: Exist for the good of society Are totally dependent on society Examples: Bees Ants, termites Stay Together

8 A Typical Bee Colony

9 Societies that Integrate Depend on the attraction of individual animals Exhibit loose division of labor Individuals: Integrate ways of behavior Thrive on support provided by society Are motivated by selfish interests Examples: Wolf, hunting dogs, etc. Bird colonies Come Together

10 Parallels to Cooperative Robotics
11 Which Approach To Choose? Differentiating approach: For tasks that require numerous repetitions of same activity over a fairly large area Examples: Waxing floor Removing barnacles off ships Collecting rock samples on Mars Integrating approach: For tasks that require several distinct subtasks Examples: Search and rescue Security, surveillance, or reconnaissance
12 Key Ideas from Biological Inspiration Communication Auditory, chemical, tactile, electrical Direct, indirect, explicit, implicit Roles Strict division vs. loose assignments Hierarchies Absolute linear ordering, partial ordering, relative ordering Purpose: reduction in fighting, efficiency Territoriality Reduces fighting, disperses group, simplifies interactions Imitation Complex mechanism for learning
13 Our Distributed Robotics Studies First: low-level, homogeneous, swarm robots Swarming, dispersion, homing, etc. Search/coverage Etc. Then: higher-level strategies, heterogeneous robots Multi-robot path planning, traffic management Task allocation Etc.
14 Key Concept in Swarm Distributed Robotics: Stigmergy Stigmergy: Term used by some biologists to describe influence on behavior due to persisting environmental effects of previous behavior Originally used by French biologist Pierre-Paul Grasse to describe behavior of nest-building termites and trails Equivalent concept: implicit communication by means of modifying the environment A mechanism for binding task state information to local features of a task site, and for communicating (implicitly) by modifying those features Stigmergy is a powerful tool for coordination in a loosely coupled system
15 Stigmergy in Nature Ant trails Ants find the shortest path to a food source in their vicinity using stigmergy to maintain traffic statistics Termite nest-building Termites build columns and arches using stigmergy to retain state about the building process Ant corpse-gathering Ants pick up dead ants and drop them in piles, preferring larger piles, until there is only one pile left
16 Ants Finding The Shortest Path Ants follow random paths, influenced by presence of pheromones Ants returning with food leave stronger trails Pheromones evaporate, causing frequent trails to dominate Shortcuts result in higher traffic (more trips per ant per unit time) and thus are selected with greater probability
17 Termites Building An Arch Termites make mud balls with pheromones Termites deposit mud balls near existing pheromone concentrations As columns get taller pheromones on the bottom evaporate Pheromones on neighboring columns cause the top to be built together to form an arch aylist&p=598428ddc4e49d85&index=0&playnext=1
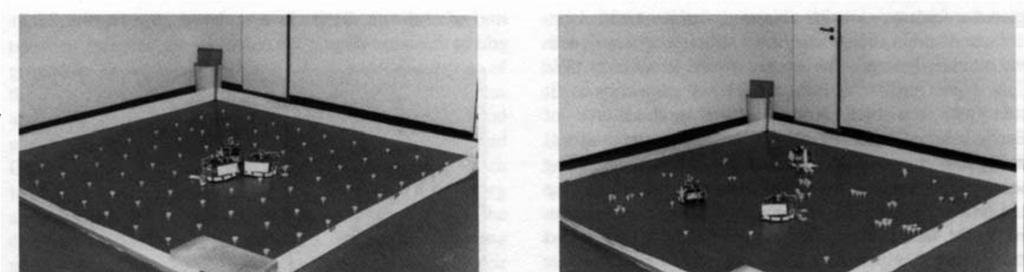
18 Ant Corpse-Gathering Scattered corpses are picked up and dropped Small piles form Gradually the piles are aggregated into a single large pile
19 How Does Stigmergy Produce Complex Patterns? The state of the environment, and the current distribution of agentswithin it, determine how the environment and the distribution of agents will change in the future Any structure emerging is a result of selforganization Self-organization: A set of dynamic mechanisms whereby structures appear at global level of a system resulting from interactions among lower-level components Rules specifying interaction are executed purely based on local information, without reference to global pattern
20 Minimal Qualities of Agent and Environment to Support Stigmergy Agent has 2 key abilities: It can move through environment It can act on environment To enable stigmergy: Environment must be changed locally by agents Changes must persist long enoughto affect the choice, parameters, or consequences of agents behavior
21 Two Ways to Structure Behavioral Sequences In solitary species Execution of first movement in sequences sets internal state With external cue, internal state initiates second movement, etc. In solitary and social insects No internal state required (in many, but not all, cases) External cue alone is sufficient to invoke subsequent actions Sets the stage for stigmergy
22 Compare Stigmergy to Direct Communication Direct communication requires: Sending robot to encode and transmit message about what is to be done, and where it is to be done Implies knowledge of location Message is local in time and space, therefore only robots close enough and not otherwise engaged will be free to receive the message Robots must decode received messages, and remember them long enough to get to the place and carry out the action, or even longer if they are currently carrying out a more important task Stigmergic communication: Requires no encoding or decoding Requires no knowledge of place Requires no memory Is not transient
23 Example Use of Stigmergy in Collective Robotics Paper references: Stigmergy, Self-Organization, and Sorting in Collective Robotics, by Holland and Melhuish, Artificial Life 5: , From Local Actions to Global Tasks: Stigmergy and Collective Robotics, by Beckers, Holland and Deneubourg in Brooks and Maes (eds.), Artificial Live IV: , Cambridge, MA: MIT Press, 1994.

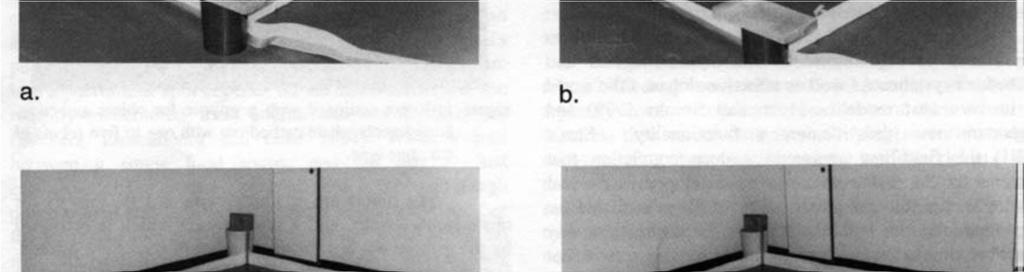
24 Collective Pile Formation Task The robots ~20cm square base with two wheels and a gripper Battery powered Infrared (IR) sensors for obstacle detection Gripper force sensor Environment Square arena, about 2.5x2.5m 81 circular pucks (4cm) arranged on a 25cm grid Beckers approach
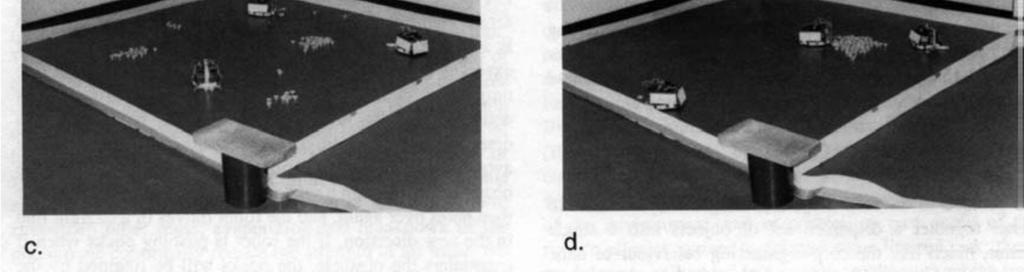
25 The Pile Formation Experiment The initial task given the robots was to push all the pucks into a single pile At the start of an experiment, robots are in the center, oriented randomly After each 10 minute interval, the robots are stopped and sizes and positions of clusters noted Experiment ends when all pucks are in single cluster
26 Robot Behaviors Very simple set of 3 behaviors: If IR sensor active: turn awayfrom obstacle through a random angle If force sensor active: Force sensor triggered when 3 or more pucks are pushed When sensor activates, pucks are dropped Reverse both motors for one second Then turn awayto a random angle Default: move forward until sensor activated
27 Back to Experiment (Becker) How it works? Robots move around randomly If they bump into a puck, they will push it along When they bump into their third puck, they drop Initially, all piles are of size 1 Robots will pick them up and will not deposit until they have collected 3 pucks A pile of 3 or more tends to get bigger Robots that hit a pile of 3 or more head-on will add their pucks to pile
28 How do Piles Aggregate? Initially, a few small clusters form quickly Then, gradually those clusters are aggregated This occurs when pucks are stripped from the edge of a pile and then deposited elsewhere Large piles have a larger ratio of areas in the middle to those on the edge. Therefore probability of hitting tangent to pile decreases with increasing pile size Thus larger piles have a larger probability of increasing as a result of this process
29 Where is the Stigmergy? By adding pucks to a pile, a robot makes the pile larger, and votes (implicitly) for that pile to be largest This stigmergically encodes a message this is the largest pile, add more pucks to it The strongest such message (i.e. the largest pile) wins and eventually accretes all the pucks Because all state information is encoded in observed pile size, new robots can be added with no communication overhead
30 Experimental Results (Beckers) The experiment was performed with varying numbers of robots Adding robots sped convergence, up to 3 robots Why? More than three robots got in each others way (i.e., interference) Whenever they turn to avoid each other, they run the risk of scattering a nearby pile as they turn away Because the frequency of interactions increases with more robots, 3 was experimentally determined to be optimal Interference is a function of robot density
31
32 Experimental Results (Cont.) 1. Over time, size of the biggest cluster grows 2. More robots faster cluster growth up to a point of robot interference 1. Over time, # of clusters shrinks 2. More robots faster reduction, up to a point of robot interference
 For these experiments, 3 robots")


33 Experimental Results (Cont.) For these experiments, 3 robots was optimal Number of interactions increased significantly with number of robots Robot efficiency for these experiments was optimized at 3 robots
34 Summary of Stigmergy Stigmergy piggybacks communication on top of robot s existing sensing and actuation Allows system to scale to additional robots with additional communication overhead Although high densities can lead to gridlock, etc. Stigmergy stores state in the environment so that it is easily retrieved by specialized sensors In nature, pheromones In robotics, variety of sensors Stigmergy can be regarded as the general exploitation of the environment as external memory resource

35 Second Case Study Title Multi-robot System Based on Model of Wolf Hunting Behavior to Emulate Wolf and Elk Interactions Authors: John D. Madden, Ronald C. Arkin and Daniel R. MacNulty IEEE International Conference on Robotics and Biomimetics, 2010
36 Goal of the Project Models of behavior from biology are used to develop heterogeneous unmanned network teams (HUNT) The ability to reduce communication and planning requirements for robot groups, while still achieving missions Mission: pursuit-evasion tasks
37 Wolf Behavior from Nature No obvious pattern of coordinated hunting behavior Rules of thumb: Attack while minimizing risk of injury with no overall had behavioral constraints on actions
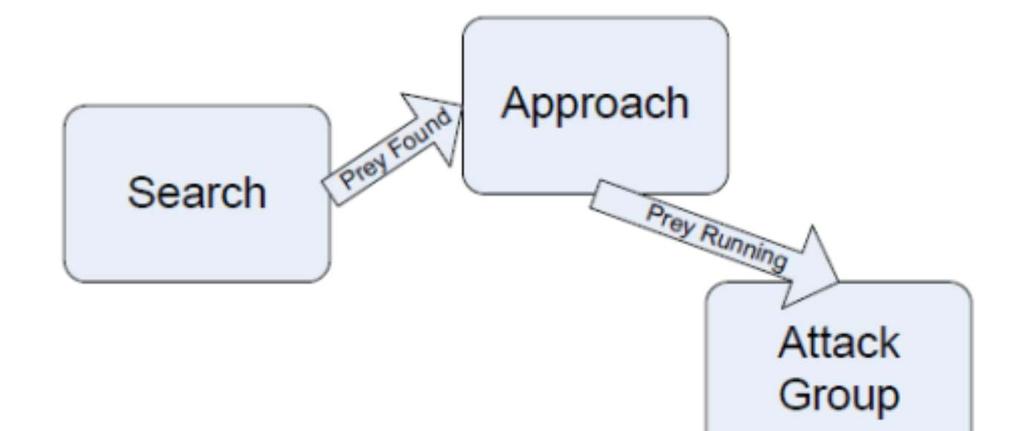
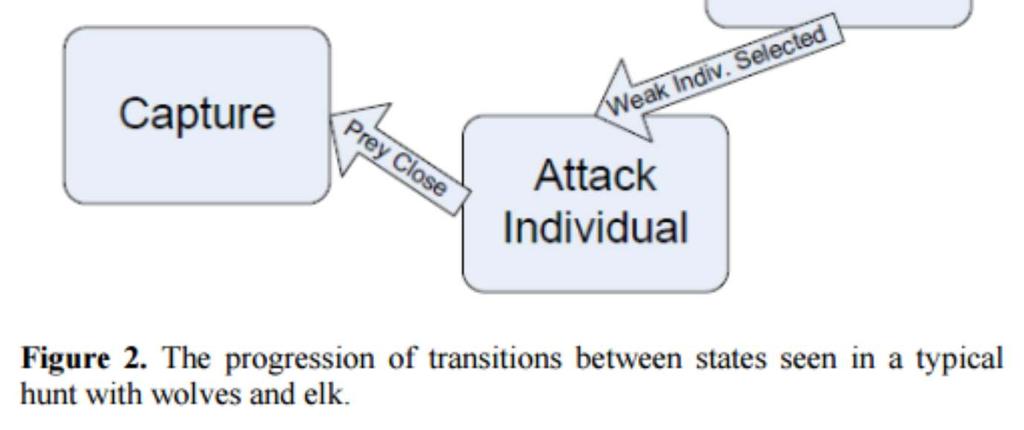
38 Transitions Model
39 Other Transitions are Possible Statistical observational data of state transitions
40 Coordination or Lack Thereof Wolves show no signs of planned strategies and no noticeable communication while hunting They do not make transitions together Coordination is a byproduct where each individual is maximizing its own utility Seeing elk being chased signals a sign of weakness of the prey, so they join the pursuit
41 Implementation of Wolf Behaviors with
42 List of Releasers and Transitions Weighted roulette wheel was used to decide which transition to take
43 List of Behaviors
44 List of Behaviors, Cont d
45 Elk Behaviors
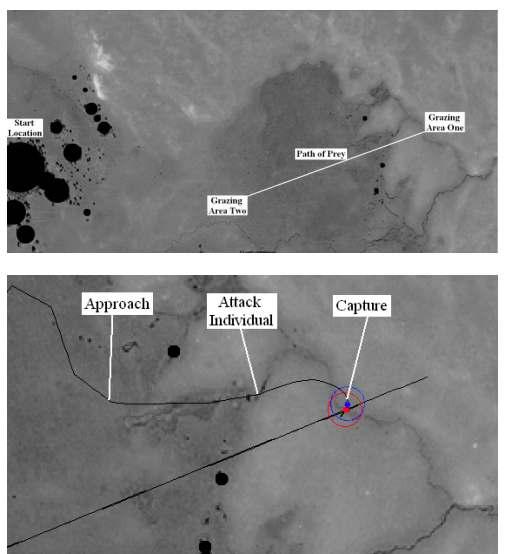
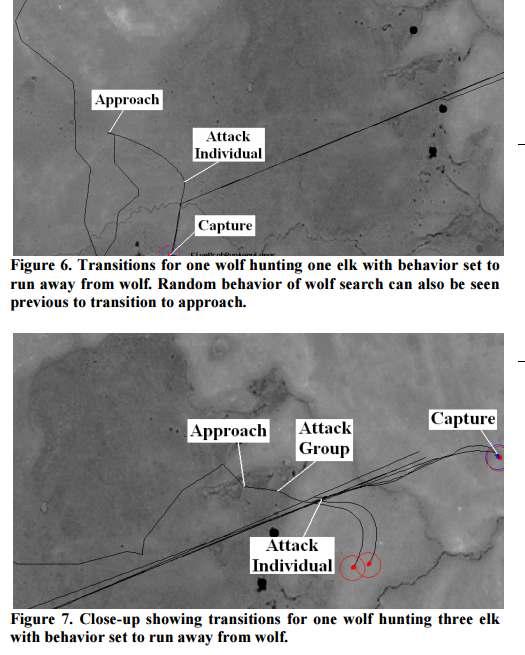
46 Simulation Results
47 Transition Results Similar to Observed Data
48 Conclusion High fidelity bio models can provide utility for a range of multi-robot applications Byproduct mutualism can provide robust results for bio groups The ability to reduce communication and planning for robot groups
49 Summary of Biological Inspirations Study social biological systems either to: Obtain inspiration for how to build multi-robot systems Validate theoretical models for how biological systems work Two types of biological parallels: differentiating and integrative Many possible sources of inspiration from biology Stigmergy is important concept for swarm cooperation through the world
SWARM ROBOTICS: PART 2. Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St.
 SWARM ROBOTICS: PART 2 Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St. John s, Canada PRINCIPLE: SELF-ORGANIZATION 2 SELF-ORGANIZATION Self-organization
SWARM ROBOTICS: PART 2 Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St. John s, Canada PRINCIPLE: SELF-ORGANIZATION 2 SELF-ORGANIZATION Self-organization
CS 599: Distributed Intelligence in Robotics
 CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
CS594, Section 30682:
 CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
SWARM ROBOTICS: PART 2
 SWARM ROBOTICS: PART 2 PRINCIPLE: SELF-ORGANIZATION Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St. John s, Canada 2 SELF-ORGANIZATION SO in Non-Biological
SWARM ROBOTICS: PART 2 PRINCIPLE: SELF-ORGANIZATION Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St. John s, Canada 2 SELF-ORGANIZATION SO in Non-Biological
Swarm Robotics. Clustering and Sorting
 Swarm Robotics Clustering and Sorting By Andrew Vardy Associate Professor Computer Science / Engineering Memorial University of Newfoundland St. John s, Canada Deneubourg JL, Goss S, Franks N, Sendova-Franks
Swarm Robotics Clustering and Sorting By Andrew Vardy Associate Professor Computer Science / Engineering Memorial University of Newfoundland St. John s, Canada Deneubourg JL, Goss S, Franks N, Sendova-Franks
1) Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg)
 Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg)") 1) Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg) 6) Virtual Ecosystems & Perspectives (sb) Inspired
1) Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg) 6) Virtual Ecosystems & Perspectives (sb) Inspired
CSCI 445 Laurent Itti. Group Robotics. Introduction to Robotics L. Itti & M. J. Mataric 1
 Introduction to Robotics CSCI 445 Laurent Itti Group Robotics Introduction to Robotics L. Itti & M. J. Mataric 1 Today s Lecture Outline Defining group behavior Why group behavior is useful Why group behavior
Introduction to Robotics CSCI 445 Laurent Itti Group Robotics Introduction to Robotics L. Itti & M. J. Mataric 1 Today s Lecture Outline Defining group behavior Why group behavior is useful Why group behavior
biologically-inspired computing lecture 20 Informatics luis rocha 2015 biologically Inspired computing INDIANA UNIVERSITY
 lecture 20 -inspired Sections I485/H400 course outlook Assignments: 35% Students will complete 4/5 assignments based on algorithms presented in class Lab meets in I1 (West) 109 on Lab Wednesdays Lab 0
lecture 20 -inspired Sections I485/H400 course outlook Assignments: 35% Students will complete 4/5 assignments based on algorithms presented in class Lab meets in I1 (West) 109 on Lab Wednesdays Lab 0
INFORMATION AND COMMUNICATION TECHNOLOGIES IMPROVING EFFICIENCIES WAYFINDING SWARM CREATURES EXPLORING THE 3D DYNAMIC VIRTUAL WORLDS
 INFORMATION AND COMMUNICATION TECHNOLOGIES IMPROVING EFFICIENCIES Refereed Paper WAYFINDING SWARM CREATURES EXPLORING THE 3D DYNAMIC VIRTUAL WORLDS University of Sydney, Australia jyoo6711@arch.usyd.edu.au
INFORMATION AND COMMUNICATION TECHNOLOGIES IMPROVING EFFICIENCIES Refereed Paper WAYFINDING SWARM CREATURES EXPLORING THE 3D DYNAMIC VIRTUAL WORLDS University of Sydney, Australia jyoo6711@arch.usyd.edu.au
Robotic Systems ECE 401RB Fall 2007
 The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
Swarm Robotics. Lecturer: Roderich Gross
 Swarm Robotics Lecturer: Roderich Gross 1 Outline Why swarm robotics? Example domains: Coordinated exploration Transportation and clustering Reconfigurable robots Summary Stigmergy revisited 2 Sources
Swarm Robotics Lecturer: Roderich Gross 1 Outline Why swarm robotics? Example domains: Coordinated exploration Transportation and clustering Reconfigurable robots Summary Stigmergy revisited 2 Sources
Collective Robotics. Marcin Pilat
 Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
CORC 3303 Exploring Robotics. Why Teams?
 Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Sorting in Swarm Robots Using Communication-Based Cluster Size Estimation
 Sorting in Swarm Robots Using Communication-Based Cluster Size Estimation Hongli Ding and Heiko Hamann Department of Computer Science, University of Paderborn, Paderborn, Germany hongli.ding@uni-paderborn.de,
Sorting in Swarm Robots Using Communication-Based Cluster Size Estimation Hongli Ding and Heiko Hamann Department of Computer Science, University of Paderborn, Paderborn, Germany hongli.ding@uni-paderborn.de,
PSYCO 457 Week 9: Collective Intelligence and Embodiment
 PSYCO 457 Week 9: Collective Intelligence and Embodiment Intelligent Collectives Cooperative Transport Robot Embodiment and Stigmergy Robots as Insects Emergence The world is full of examples of intelligence
PSYCO 457 Week 9: Collective Intelligence and Embodiment Intelligent Collectives Cooperative Transport Robot Embodiment and Stigmergy Robots as Insects Emergence The world is full of examples of intelligence
SWARM INTELLIGENCE. Mario Pavone Department of Mathematics & Computer Science University of Catania
 Worker Ant #1: I'm lost! Where's the line? What do I do? Worker Ant #2: Help! Worker Ant #3: We'll be stuck here forever! Mr. Soil: Do not panic, do not panic. We are trained professionals. Now, stay calm.
Worker Ant #1: I'm lost! Where's the line? What do I do? Worker Ant #2: Help! Worker Ant #3: We'll be stuck here forever! Mr. Soil: Do not panic, do not panic. We are trained professionals. Now, stay calm.
Multi-Robot Coordination. Chapter 11
 Multi-Robot Coordination Chapter 11 Objectives To understand some of the problems being studied with multiple robots To understand the challenges involved with coordinating robots To investigate a simple
Multi-Robot Coordination Chapter 11 Objectives To understand some of the problems being studied with multiple robots To understand the challenges involved with coordinating robots To investigate a simple
Biologically-inspired Autonomic Wireless Sensor Networks. Haoliang Wang 12/07/2015
 Biologically-inspired Autonomic Wireless Sensor Networks Haoliang Wang 12/07/2015 Wireless Sensor Networks A collection of tiny and relatively cheap sensor nodes Low cost for large scale deployment Limited
Biologically-inspired Autonomic Wireless Sensor Networks Haoliang Wang 12/07/2015 Wireless Sensor Networks A collection of tiny and relatively cheap sensor nodes Low cost for large scale deployment Limited
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
FROM LOCAL ACTIONS TO GLOBAL TASKS: STIGMERGY AND COLLECTIVE ROBOTICS
 FROM LOCAL ACTIONS TO GLOBAL TASKS: STIGMERGY AND COLLECTIVE ROBOTICS R. Beckers 1,2, O.E. Holland 1,3 and J.L. Deneubourg 2 1 ZiF-Universität Bielefeld, Wellenberg 1, D-33615 Bielefeld 2 Centre for non-linear
FROM LOCAL ACTIONS TO GLOBAL TASKS: STIGMERGY AND COLLECTIVE ROBOTICS R. Beckers 1,2, O.E. Holland 1,3 and J.L. Deneubourg 2 1 ZiF-Universität Bielefeld, Wellenberg 1, D-33615 Bielefeld 2 Centre for non-linear
Sequential Task Execution in a Minimalist Distributed Robotic System
 Sequential Task Execution in a Minimalist Distributed Robotic System Chris Jones Maja J. Matarić Computer Science Department University of Southern California 941 West 37th Place, Mailcode 0781 Los Angeles,
Sequential Task Execution in a Minimalist Distributed Robotic System Chris Jones Maja J. Matarić Computer Science Department University of Southern California 941 West 37th Place, Mailcode 0781 Los Angeles,
In vivo, in silico, in machina: ants and robots balance memory and communication to collectively exploit information
 In vivo, in silico, in machina: ants and robots balance memory and communication to collectively exploit information Melanie E. Moses, Kenneth Letendre, Joshua P. Hecker, Tatiana P. Flanagan Department
In vivo, in silico, in machina: ants and robots balance memory and communication to collectively exploit information Melanie E. Moses, Kenneth Letendre, Joshua P. Hecker, Tatiana P. Flanagan Department
Multiagent systems: Lessons from social insects and collective
 Multiagent systems: Lessons from social insects and collective robotics O.E.Holland Intelligent Autonomous Systems Laboratory Faculty of Engineering [Jniversity of the West of England Bristol BS16 1QY
Multiagent systems: Lessons from social insects and collective robotics O.E.Holland Intelligent Autonomous Systems Laboratory Faculty of Engineering [Jniversity of the West of England Bristol BS16 1QY
An Introduction to Swarm Intelligence Issues
 An Introduction to Swarm Intelligence Issues Gianni Di Caro gianni@idsia.ch IDSIA, USI/SUPSI, Lugano (CH) 1 Topics that will be discussed Basic ideas behind the notion of Swarm Intelligence The role of
An Introduction to Swarm Intelligence Issues Gianni Di Caro gianni@idsia.ch IDSIA, USI/SUPSI, Lugano (CH) 1 Topics that will be discussed Basic ideas behind the notion of Swarm Intelligence The role of
Swarm Intelligence. Corey Fehr Merle Good Shawn Keown Gordon Fedoriw
 Swarm Intelligence Corey Fehr Merle Good Shawn Keown Gordon Fedoriw Ants in the Pants! An Overview Real world insect examples Theory of Swarm Intelligence From Insects to Realistic A.I. Algorithms Examples
Swarm Intelligence Corey Fehr Merle Good Shawn Keown Gordon Fedoriw Ants in the Pants! An Overview Real world insect examples Theory of Swarm Intelligence From Insects to Realistic A.I. Algorithms Examples
Design of Adaptive Collective Foraging in Swarm Robotic Systems
 Western Michigan University ScholarWorks at WMU Dissertations Graduate College 5-2010 Design of Adaptive Collective Foraging in Swarm Robotic Systems Hanyi Dai Western Michigan University Follow this and
Western Michigan University ScholarWorks at WMU Dissertations Graduate College 5-2010 Design of Adaptive Collective Foraging in Swarm Robotic Systems Hanyi Dai Western Michigan University Follow this and
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization
 Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Probabilistic Modelling of a Bio-Inspired Collective Experiment with Real Robots
 Probabilistic Modelling of a Bio-Inspired Collective Experiment with Real Robots A. Martinoli, and F. Mondada Microcomputing Laboratory, Swiss Federal Institute of Technology IN-F Ecublens, CH- Lausanne
Probabilistic Modelling of a Bio-Inspired Collective Experiment with Real Robots A. Martinoli, and F. Mondada Microcomputing Laboratory, Swiss Federal Institute of Technology IN-F Ecublens, CH- Lausanne
EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS
 EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS DAVIDE MAROCCO STEFANO NOLFI Institute of Cognitive Science and Technologies, CNR, Via San Martino della Battaglia 44, Rome, 00185, Italy
EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS DAVIDE MAROCCO STEFANO NOLFI Institute of Cognitive Science and Technologies, CNR, Via San Martino della Battaglia 44, Rome, 00185, Italy
KOVAN Dept. of Computer Eng. Middle East Technical University Ankara, Turkey
 Swarm Robotics: From sources of inspiration to domains of application Erol Sahin KOVAN Dept. of Computer Eng. Middle East Technical University Ankara, Turkey http://www.kovan.ceng.metu.edu.tr What is Swarm
Swarm Robotics: From sources of inspiration to domains of application Erol Sahin KOVAN Dept. of Computer Eng. Middle East Technical University Ankara, Turkey http://www.kovan.ceng.metu.edu.tr What is Swarm
Adaptive Action Selection without Explicit Communication for Multi-robot Box-pushing
 Adaptive Action Selection without Explicit Communication for Multi-robot Box-pushing Seiji Yamada Jun ya Saito CISS, IGSSE, Tokyo Institute of Technology 4259 Nagatsuta, Midori, Yokohama 226-8502, JAPAN
Adaptive Action Selection without Explicit Communication for Multi-robot Box-pushing Seiji Yamada Jun ya Saito CISS, IGSSE, Tokyo Institute of Technology 4259 Nagatsuta, Midori, Yokohama 226-8502, JAPAN
GROUP BEHAVIOR IN MOBILE AUTONOMOUS AGENTS. Bruce Turner Intelligent Machine Design Lab Summer 1999
 GROUP BEHAVIOR IN MOBILE AUTONOMOUS AGENTS Bruce Turner Intelligent Machine Design Lab Summer 1999 1 Introduction: In the natural world, some types of insects live in social communities that seem to be
GROUP BEHAVIOR IN MOBILE AUTONOMOUS AGENTS Bruce Turner Intelligent Machine Design Lab Summer 1999 1 Introduction: In the natural world, some types of insects live in social communities that seem to be
NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION
 Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
Multi-Robot Systems, Part II
 Multi-Robot Systems, Part II October 31, 2002 Class Meeting 20 A team effort is a lot of people doing what I say. -- Michael Winner. Objectives Multi-Robot Systems, Part II Overview (con t.) Multi-Robot
Multi-Robot Systems, Part II October 31, 2002 Class Meeting 20 A team effort is a lot of people doing what I say. -- Michael Winner. Objectives Multi-Robot Systems, Part II Overview (con t.) Multi-Robot
Implicit Fitness Functions for Evolving a Drawing Robot
 Implicit Fitness Functions for Evolving a Drawing Robot Jon Bird, Phil Husbands, Martin Perris, Bill Bigge and Paul Brown Centre for Computational Neuroscience and Robotics University of Sussex, Brighton,
Implicit Fitness Functions for Evolving a Drawing Robot Jon Bird, Phil Husbands, Martin Perris, Bill Bigge and Paul Brown Centre for Computational Neuroscience and Robotics University of Sussex, Brighton,
Prey Modeling in Predator/Prey Interaction: Risk Avoidance, Group Foraging, and Communication
 Prey Modeling in Predator/Prey Interaction: Risk Avoidance, Group Foraging, and Communication June 24, 2011, Santa Barbara Control Workshop: Decision, Dynamics and Control in Multi-Agent Systems Karl Hedrick
Prey Modeling in Predator/Prey Interaction: Risk Avoidance, Group Foraging, and Communication June 24, 2011, Santa Barbara Control Workshop: Decision, Dynamics and Control in Multi-Agent Systems Karl Hedrick
Control issues in cognitive networks. Marko Höyhtyä and Tao Chen CWC-VTT-Gigaseminar 4th December 2008
 Control issues in cognitive networks Marko Höyhtyä and Tao Chen CWC-VTT-Gigaseminar 4th December 2008 Outline Cognitive wireless networks Cognitive mesh Topology control Frequency selection Power control
Control issues in cognitive networks Marko Höyhtyä and Tao Chen CWC-VTT-Gigaseminar 4th December 2008 Outline Cognitive wireless networks Cognitive mesh Topology control Frequency selection Power control
Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
 In: M.H. Hamza (ed.), Proceedings of the 21st IASTED Conference on Applied Informatics, pp. 1278-128. Held February, 1-1, 2, Insbruck, Austria Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
In: M.H. Hamza (ed.), Proceedings of the 21st IASTED Conference on Applied Informatics, pp. 1278-128. Held February, 1-1, 2, Insbruck, Austria Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
Multi robot Team Formation for Distributed Area Coverage. Raj Dasgupta Computer Science Department University of Nebraska, Omaha
 Multi robot Team Formation for Distributed Area Coverage Raj Dasgupta Computer Science Department University of Nebraska, Omaha C MANTIC Lab Collaborative Multi AgeNt/Multi robot Technologies for Intelligent
Multi robot Team Formation for Distributed Area Coverage Raj Dasgupta Computer Science Department University of Nebraska, Omaha C MANTIC Lab Collaborative Multi AgeNt/Multi robot Technologies for Intelligent
Self-Organised Task Allocation in a Group of Robots
 Self-Organised Task Allocation in a Group of Robots Thomas H. Labella, Marco Dorigo and Jean-Louis Deneubourg Technical Report No. TR/IRIDIA/2004-6 November 30, 2004 Published in R. Alami, editor, Proceedings
Self-Organised Task Allocation in a Group of Robots Thomas H. Labella, Marco Dorigo and Jean-Louis Deneubourg Technical Report No. TR/IRIDIA/2004-6 November 30, 2004 Published in R. Alami, editor, Proceedings
Distributed Area Coverage Using Robot Flocks
 Distributed Area Coverage Using Robot Flocks Ke Cheng, Prithviraj Dasgupta and Yi Wang Computer Science Department University of Nebraska, Omaha, NE, USA E-mail: {kcheng,ywang,pdasgupta}@mail.unomaha.edu
Distributed Area Coverage Using Robot Flocks Ke Cheng, Prithviraj Dasgupta and Yi Wang Computer Science Department University of Nebraska, Omaha, NE, USA E-mail: {kcheng,ywang,pdasgupta}@mail.unomaha.edu
1,024 Kilobot Robots Studying Collective Behaviors & Swarm Intelligence with Little Bitty Robots
 NJIT 1,024 Kilobot Robots Studying Collective Behaviors & Swarm Intelligence with Little Bitty Robots From ant colonies to how cells cooperate to form complex patterns, New Jersey Institute of Technology(NJIT)
NJIT 1,024 Kilobot Robots Studying Collective Behaviors & Swarm Intelligence with Little Bitty Robots From ant colonies to how cells cooperate to form complex patterns, New Jersey Institute of Technology(NJIT)
Shuffled Complex Evolution
 Shuffled Complex Evolution Shuffled Complex Evolution An Evolutionary algorithm That performs local and global search A solution evolves locally through a memetic evolution (Local search) This local search
Shuffled Complex Evolution Shuffled Complex Evolution An Evolutionary algorithm That performs local and global search A solution evolves locally through a memetic evolution (Local search) This local search
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
A Modified Ant Colony Optimization Algorithm for Implementation on Multi-Core Robots
 A Modified Ant Colony Optimization Algorithm for Implementation on Multi-Core Robots Timothy Krentz Chase Greenhagen Aaron Roggow Danielle Desmond Sami Khorbotly Department of Electrical and Computer Engineering
A Modified Ant Colony Optimization Algorithm for Implementation on Multi-Core Robots Timothy Krentz Chase Greenhagen Aaron Roggow Danielle Desmond Sami Khorbotly Department of Electrical and Computer Engineering
Formica ex Machina: Ant Swarm Foraging from Physical to Virtual and Back Again
 Formica ex Machina: Ant Swarm Foraging from Physical to Virtual and Back Again Joshua P. Hecker 1, Kenneth Letendre 1,2, Karl Stolleis 1, Daniel Washington 1, and Melanie E. Moses 1,2 1 Department of Computer
Formica ex Machina: Ant Swarm Foraging from Physical to Virtual and Back Again Joshua P. Hecker 1, Kenneth Letendre 1,2, Karl Stolleis 1, Daniel Washington 1, and Melanie E. Moses 1,2 1 Department of Computer
A Genetic Algorithm-Based Controller for Decentralized Multi-Agent Robotic Systems
 A Genetic Algorithm-Based Controller for Decentralized Multi-Agent Robotic Systems Arvin Agah Bio-Robotics Division Mechanical Engineering Laboratory, AIST-MITI 1-2 Namiki, Tsukuba 305, JAPAN agah@melcy.mel.go.jp
A Genetic Algorithm-Based Controller for Decentralized Multi-Agent Robotic Systems Arvin Agah Bio-Robotics Division Mechanical Engineering Laboratory, AIST-MITI 1-2 Namiki, Tsukuba 305, JAPAN agah@melcy.mel.go.jp
Contact information. Tony White, Associate Professor
 Contact information Tony White, Associate Professor Office: Hertzberg 5354 Tel: 520-2600 x2208 Fax: 520-4334 E-mail: arpwhite@scs.carleton.ca E-mail: arpwhite@hotmail.com Web: http://www.scs.carleton.ca/~arpwhite
Contact information Tony White, Associate Professor Office: Hertzberg 5354 Tel: 520-2600 x2208 Fax: 520-4334 E-mail: arpwhite@scs.carleton.ca E-mail: arpwhite@hotmail.com Web: http://www.scs.carleton.ca/~arpwhite
Task Allocation: Role Assignment. Dr. Daisy Tang
 Task Allocation: Role Assignment Dr. Daisy Tang Outline Multi-robot dynamic role assignment Task Allocation Based On Roles Usually, a task is decomposed into roleseither by a general autonomous planner,
Task Allocation: Role Assignment Dr. Daisy Tang Outline Multi-robot dynamic role assignment Task Allocation Based On Roles Usually, a task is decomposed into roleseither by a general autonomous planner,
Laps to Criterion 160. Pheromone Duration (min)
") Experiments in Path Optimization via Pheromone Trails by Simulated Robots Jason L. Almeter y September 17, 1996 Abstract Ants lay pheromone trails to lead other individuals to a destination. Due to stochastic
Experiments in Path Optimization via Pheromone Trails by Simulated Robots Jason L. Almeter y September 17, 1996 Abstract Ants lay pheromone trails to lead other individuals to a destination. Due to stochastic
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Instructors: Prof. Takashi Hiyama (TH) Prof. Hassan Bevrani (HB) Syafaruddin, D.Eng (S) Time: Wednesday,
 Prof. Hassan Bevrani (HB) Syafaruddin, D.Eng (S) Time: Wednesday,") Intelligent System Application to Power System Instructors: Prof. Takashi Hiyama (TH) Prof. Hassan Bevrani (HB) Syafaruddin, D.Eng (S) Time: Wednesday, 10.20-11.50 Venue: Room 208 Intelligent System Application
Intelligent System Application to Power System Instructors: Prof. Takashi Hiyama (TH) Prof. Hassan Bevrani (HB) Syafaruddin, D.Eng (S) Time: Wednesday, 10.20-11.50 Venue: Room 208 Intelligent System Application
Distributed Robotics From Science to Systems
 Distributed Robotics From Science to Systems Nikolaus Correll Distributed Robotics Laboratory, CSAIL, MIT August 8, 2008 Distributed Robotic Systems DRS 1 sensor 1 actuator... 1 device Applications Giant,
Distributed Robotics From Science to Systems Nikolaus Correll Distributed Robotics Laboratory, CSAIL, MIT August 8, 2008 Distributed Robotic Systems DRS 1 sensor 1 actuator... 1 device Applications Giant,
NASA Swarmathon Team ABC (Artificial Bee Colony)
") NASA Swarmathon Team ABC (Artificial Bee Colony) Cheylianie Rivera Maldonado, Kevin Rolón Domena, José Peña Pérez, Aníbal Robles, Jonathan Oquendo, Javier Olmo Martínez University of Puerto Rico at Arecibo
NASA Swarmathon Team ABC (Artificial Bee Colony) Cheylianie Rivera Maldonado, Kevin Rolón Domena, José Peña Pérez, Aníbal Robles, Jonathan Oquendo, Javier Olmo Martínez University of Puerto Rico at Arecibo
Cooperative navigation in robotic swarms
 1 Cooperative navigation in robotic swarms Frederick Ducatelle, Gianni A. Di Caro, Alexander Förster, Michael Bonani, Marco Dorigo, Stéphane Magnenat, Francesco Mondada, Rehan O Grady, Carlo Pinciroli,
1 Cooperative navigation in robotic swarms Frederick Ducatelle, Gianni A. Di Caro, Alexander Förster, Michael Bonani, Marco Dorigo, Stéphane Magnenat, Francesco Mondada, Rehan O Grady, Carlo Pinciroli,
Path Formation and Goal Search in Swarm Robotics
 Path Formation and Goal Search in Swarm Robotics by Shervin Nouyan Université Libre de Bruxelles, IRIDIA Avenue Franklin Roosevelt 50, CP 194/6, 1050 Brussels, Belgium SNouyan@ulb.ac.be Supervised by Marco
Path Formation and Goal Search in Swarm Robotics by Shervin Nouyan Université Libre de Bruxelles, IRIDIA Avenue Franklin Roosevelt 50, CP 194/6, 1050 Brussels, Belgium SNouyan@ulb.ac.be Supervised by Marco
Structure and Synthesis of Robot Motion
 Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
Artificial Intelligence. Cameron Jett, William Kentris, Arthur Mo, Juan Roman
 Artificial Intelligence Cameron Jett, William Kentris, Arthur Mo, Juan Roman AI Outline Handicap for AI Machine Learning Monte Carlo Methods Group Intelligence Incorporating stupidity into game AI overview
Artificial Intelligence Cameron Jett, William Kentris, Arthur Mo, Juan Roman AI Outline Handicap for AI Machine Learning Monte Carlo Methods Group Intelligence Incorporating stupidity into game AI overview
Multi-Robot Path Planning and Motion Coordination
 Multi-Robot Path Planning and Motion Coordination Dr. Lynne E. Parker Professor and Associate Head Dept. of Electrical Engineering & Computer Science University of Tennessee, Knoxville USA leparker@utk.edu
Multi-Robot Path Planning and Motion Coordination Dr. Lynne E. Parker Professor and Associate Head Dept. of Electrical Engineering & Computer Science University of Tennessee, Knoxville USA leparker@utk.edu
Programmable self-assembly in a thousandrobot
 Programmable self-assembly in a thousandrobot swarm Michael Rubenstein, Alejandro Cornejo, Radhika Nagpal. By- Swapna Joshi 1 st year Ph.D Computing Culture and Society. Authors Michael Rubenstein Assistant
Programmable self-assembly in a thousandrobot swarm Michael Rubenstein, Alejandro Cornejo, Radhika Nagpal. By- Swapna Joshi 1 st year Ph.D Computing Culture and Society. Authors Michael Rubenstein Assistant
Investigation of Navigating Mobile Agents in Simulation Environments
 Investigation of Navigating Mobile Agents in Simulation Environments Theses of the Doctoral Dissertation Richárd Szabó Department of Software Technology and Methodology Faculty of Informatics Loránd Eötvös
Investigation of Navigating Mobile Agents in Simulation Environments Theses of the Doctoral Dissertation Richárd Szabó Department of Software Technology and Methodology Faculty of Informatics Loránd Eötvös
Museum robots: multi robot systems for public exhibition
 Museum robots: multi robot systems for public exhibition Conference or Workshop Item Accepted Version Hutt, B.D. and Warwick, K. (2004) Museum robots: multi robot systems for public exhibition. In: Proc.
Museum robots: multi robot systems for public exhibition Conference or Workshop Item Accepted Version Hutt, B.D. and Warwick, K. (2004) Museum robots: multi robot systems for public exhibition. In: Proc.
Swarm robotics in wireless distributed protocol design for coordinating robots involved in cooperative tasks
 Swarm robotics in wireless distributed protocol design for coordinating robots involved in cooperative tasks Floriano De Rango 1, Nunzia Palmieri 1, Xin-She Yang 2, Salvatore Marano 1 arxiv:1804.08096v1
Swarm robotics in wireless distributed protocol design for coordinating robots involved in cooperative tasks Floriano De Rango 1, Nunzia Palmieri 1, Xin-She Yang 2, Salvatore Marano 1 arxiv:1804.08096v1
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Synthetic Brains: Update
 Synthetic Brains: Update Bryan Adams Computer Science and Artificial Intelligence Laboratory (CSAIL) Massachusetts Institute of Technology Project Review January 04 through April 04 Project Status Current
Synthetic Brains: Update Bryan Adams Computer Science and Artificial Intelligence Laboratory (CSAIL) Massachusetts Institute of Technology Project Review January 04 through April 04 Project Status Current
Distributed Intelligent Systems W11 Machine-Learning Methods Applied to Distributed Robotic Systems
 Distributed Intelligent Systems W11 Machine-Learning Methods Applied to Distributed Robotic Systems 1 Outline Revisiting expensive optimization problems Additional experimental evidence Noise-resistant
Distributed Intelligent Systems W11 Machine-Learning Methods Applied to Distributed Robotic Systems 1 Outline Revisiting expensive optimization problems Additional experimental evidence Noise-resistant
Levels of Description: A Role for Robots in Cognitive Science Education
 Levels of Description: A Role for Robots in Cognitive Science Education Terry Stewart 1 and Robert West 2 1 Department of Cognitive Science 2 Department of Psychology Carleton University In this paper,
Levels of Description: A Role for Robots in Cognitive Science Education Terry Stewart 1 and Robert West 2 1 Department of Cognitive Science 2 Department of Psychology Carleton University In this paper,
Mechatronics 19 (2009) Contents lists available at ScienceDirect. Mechatronics. journal homepage:
 Contents lists available at ScienceDirect. Mechatronics. journal homepage:") Mechatronics 19 (2009) 463 470 Contents lists available at ScienceDirect Mechatronics journal homepage: www.elsevier.com/locate/mechatronics A cooperative multi-robot architecture for moving a paralyzed
Mechatronics 19 (2009) 463 470 Contents lists available at ScienceDirect Mechatronics journal homepage: www.elsevier.com/locate/mechatronics A cooperative multi-robot architecture for moving a paralyzed
Artificial Intelligence
 Artificial Intelligence Lecture 01 - Introduction Edirlei Soares de Lima What is Artificial Intelligence? Artificial intelligence is about making computers able to perform the
Artificial Intelligence Lecture 01 - Introduction Edirlei Soares de Lima What is Artificial Intelligence? Artificial intelligence is about making computers able to perform the
The Behavior Evolving Model and Application of Virtual Robots
 The Behavior Evolving Model and Application of Virtual Robots Suchul Hwang Kyungdal Cho V. Scott Gordon Inha Tech. College Inha Tech College CSUS, Sacramento 253 Yonghyundong Namku 253 Yonghyundong Namku
The Behavior Evolving Model and Application of Virtual Robots Suchul Hwang Kyungdal Cho V. Scott Gordon Inha Tech. College Inha Tech College CSUS, Sacramento 253 Yonghyundong Namku 253 Yonghyundong Namku
BUILDING A SWARM OF ROBOTIC BEES
 World Automation Congress 2010 TSI Press. BUILDING A SWARM OF ROBOTIC BEES ALEKSANDAR JEVTIC (1), PEYMON GAZI (2), DIEGO ANDINA (1), Mo JAMSHlDI (2) (1) Group for Automation in Signal and Communications,
World Automation Congress 2010 TSI Press. BUILDING A SWARM OF ROBOTIC BEES ALEKSANDAR JEVTIC (1), PEYMON GAZI (2), DIEGO ANDINA (1), Mo JAMSHlDI (2) (1) Group for Automation in Signal and Communications,
Lab 1: Testing and Measurement on the r-one
 Lab 1: Testing and Measurement on the r-one Note: This lab is not graded. However, we will discuss the results in class, and think just how embarrassing it will be for me to call on you and you don t have
Lab 1: Testing and Measurement on the r-one Note: This lab is not graded. However, we will discuss the results in class, and think just how embarrassing it will be for me to call on you and you don t have
A Bio-inspired Multi-Robot Coordination Approach
 A Bio-inspired Multi-Robot Coordination Approach Yan Meng, Ọlọrundamilọla Kazeem and Jing Gan Department of Electrical and Computer Engineering Stevens Institute of Technology, Hoboen, NJ 07030 yan.meng@stevens.edu,
A Bio-inspired Multi-Robot Coordination Approach Yan Meng, Ọlọrundamilọla Kazeem and Jing Gan Department of Electrical and Computer Engineering Stevens Institute of Technology, Hoboen, NJ 07030 yan.meng@stevens.edu,
Towards an Engineering Science of Robot Foraging
 Towards an Engineering Science of Robot Foraging Alan FT Winfield Abstract Foraging is a benchmark problem in robotics - especially for distributed autonomous robotic systems. The systematic study of robot
Towards an Engineering Science of Robot Foraging Alan FT Winfield Abstract Foraging is a benchmark problem in robotics - especially for distributed autonomous robotic systems. The systematic study of robot
5a. Reactive Agents. COMP3411: Artificial Intelligence. Outline. History of Reactive Agents. Reactive Agents. History of Reactive Agents
 COMP3411 15s1 Reactive Agents 1 COMP3411: Artificial Intelligence 5a. Reactive Agents Outline History of Reactive Agents Chemotaxis Behavior-Based Robotics COMP3411 15s1 Reactive Agents 2 Reactive Agents
COMP3411 15s1 Reactive Agents 1 COMP3411: Artificial Intelligence 5a. Reactive Agents Outline History of Reactive Agents Chemotaxis Behavior-Based Robotics COMP3411 15s1 Reactive Agents 2 Reactive Agents
Franοcois Michaud and Minh Tuan Vu. LABORIUS - Research Laboratory on Mobile Robotics and Intelligent Systems
 Light Signaling for Social Interaction with Mobile Robots Franοcois Michaud and Minh Tuan Vu LABORIUS - Research Laboratory on Mobile Robotics and Intelligent Systems Department of Electrical and Computer
Light Signaling for Social Interaction with Mobile Robots Franοcois Michaud and Minh Tuan Vu LABORIUS - Research Laboratory on Mobile Robotics and Intelligent Systems Department of Electrical and Computer
Surveillance strategies for autonomous mobile robots. Nicola Basilico Department of Computer Science University of Milan
 Surveillance strategies for autonomous mobile robots Nicola Basilico Department of Computer Science University of Milan Intelligence, surveillance, and reconnaissance (ISR) with autonomous UAVs ISR defines
Surveillance strategies for autonomous mobile robots Nicola Basilico Department of Computer Science University of Milan Intelligence, surveillance, and reconnaissance (ISR) with autonomous UAVs ISR defines
Multi-Platform Soccer Robot Development System
 Multi-Platform Soccer Robot Development System Hui Wang, Han Wang, Chunmiao Wang, William Y. C. Soh Division of Control & Instrumentation, School of EEE Nanyang Technological University Nanyang Avenue,
Multi-Platform Soccer Robot Development System Hui Wang, Han Wang, Chunmiao Wang, William Y. C. Soh Division of Control & Instrumentation, School of EEE Nanyang Technological University Nanyang Avenue,
Expert Assessment of Stigmergy: A Report for the Department of National Defence
 Expert Assessment of Stigmergy: A Report for the Department of National Defence Contract No. File No. Client Reference No.: W7714-040899/003/SV 011 sv.w7714-040899 W7714-4-0899 Requisition No. W7714-040899
Expert Assessment of Stigmergy: A Report for the Department of National Defence Contract No. File No. Client Reference No.: W7714-040899/003/SV 011 sv.w7714-040899 W7714-4-0899 Requisition No. W7714-040899
Ant Food Foraging Behaviors
 nt Food Foraging ehaviors Katie Kinzler Journal Club June 5, 2008 rticle Details From nonlinearity to optimality: pheromone trail foraging by ants David J.T. Sumpter and Madeleine eekman Journal of nimal
nt Food Foraging ehaviors Katie Kinzler Journal Club June 5, 2008 rticle Details From nonlinearity to optimality: pheromone trail foraging by ants David J.T. Sumpter and Madeleine eekman Journal of nimal
Distributed Task Allocation in Swarms. of Robots
 Distributed Task Allocation in Swarms Aleksandar Jevtić Robosoft Technopole d'izarbel, F-64210 Bidart, France of Robots Diego Andina Group for Automation in Signals and Communications E.T.S.I.T.-Universidad
Distributed Task Allocation in Swarms Aleksandar Jevtić Robosoft Technopole d'izarbel, F-64210 Bidart, France of Robots Diego Andina Group for Automation in Signals and Communications E.T.S.I.T.-Universidad
Monte Carlo based battleship agent
 Monte Carlo based battleship agent Written by: Omer Haber, 313302010; Dror Sharf, 315357319 Introduction The game of battleship is a guessing game for two players which has been around for almost a century.
Monte Carlo based battleship agent Written by: Omer Haber, 313302010; Dror Sharf, 315357319 Introduction The game of battleship is a guessing game for two players which has been around for almost a century.
Autonomous Self-deployment of Wireless Access Networks in an Airport Environment *
 Autonomous Self-deployment of Wireless Access Networks in an Airport Environment * Holger Claussen Bell Labs Research, Swindon, UK. * This work was part-supported by the EU Commission through the IST FP5
Autonomous Self-deployment of Wireless Access Networks in an Airport Environment * Holger Claussen Bell Labs Research, Swindon, UK. * This work was part-supported by the EU Commission through the IST FP5
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts
 Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
From Tom Thumb to the Dockers: Some Experiments with Foraging Robots
 From Tom Thumb to the Dockers: Some Experiments with Foraging Robots Alexis Drogoul, Jacques Ferber LAFORIA, Boîte 169,Université Paris VI, 75252 PARIS CEDEX O5 FRANCE drogoul@laforia.ibp.fr, ferber@laforia.ibp.fr
From Tom Thumb to the Dockers: Some Experiments with Foraging Robots Alexis Drogoul, Jacques Ferber LAFORIA, Boîte 169,Université Paris VI, 75252 PARIS CEDEX O5 FRANCE drogoul@laforia.ibp.fr, ferber@laforia.ibp.fr
AN0503 Using swarm bee LE for Collision Avoidance Systems (CAS)
") AN0503 Using swarm bee LE for Collision Avoidance Systems (CAS) 1.3 NA-14-0267-0019-1.3 Document Information Document Title: Document Version: 1.3 Current Date: 2016-05-18 Print Date: 2016-05-18 Document
AN0503 Using swarm bee LE for Collision Avoidance Systems (CAS) 1.3 NA-14-0267-0019-1.3 Document Information Document Title: Document Version: 1.3 Current Date: 2016-05-18 Print Date: 2016-05-18 Document
Outline. Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
 Environment types Agent types") Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Efficiency and Optimization of Explicit and Implicit Communication Schemes in Collaborative Robotics Experiments
 Efficiency and Optimization of Explicit and Implicit Communication Schemes in Collaborative Robotics Experiments Kjerstin I. Easton, Alcherio Martinoli Collective Robotics Group, California Institute of
Efficiency and Optimization of Explicit and Implicit Communication Schemes in Collaborative Robotics Experiments Kjerstin I. Easton, Alcherio Martinoli Collective Robotics Group, California Institute of
Important Tools and Perspectives for the Future of AI
 Important Tools and Perspectives for the Future of AI The Norwegian University of Science and Technology (NTNU) Trondheim, Norway keithd@idi.ntnu.no April 1, 2011 Outline 1 Artificial Life 2 Cognitive
Important Tools and Perspectives for the Future of AI The Norwegian University of Science and Technology (NTNU) Trondheim, Norway keithd@idi.ntnu.no April 1, 2011 Outline 1 Artificial Life 2 Cognitive
Controlling a Sprite with Ultrasound
 Controlling a Sprite with Ultrasound How to Connect the Ultrasonic Sensor This describes how to set up and subsequently use an ultrasonic sensor (transceiver) with Scratch, with the ultimate aim being
Controlling a Sprite with Ultrasound How to Connect the Ultrasonic Sensor This describes how to set up and subsequently use an ultrasonic sensor (transceiver) with Scratch, with the ultimate aim being
Robots in the Loop: Supporting an Incremental Simulation-based Design Process
 s in the Loop: Supporting an Incremental -based Design Process Xiaolin Hu Computer Science Department Georgia State University Atlanta, GA, USA xhu@cs.gsu.edu Abstract This paper presents the results of
s in the Loop: Supporting an Incremental -based Design Process Xiaolin Hu Computer Science Department Georgia State University Atlanta, GA, USA xhu@cs.gsu.edu Abstract This paper presents the results of
PERFORMANCE ANALYSIS OF A RANDOM SEARCH ALGORITHM FOR DISTRIBUTED AUTONOMOUS MOBILE ROBOTS CHENG CHEE KONG NATIONAL UNIVERSITY OF SINGAPORE
 PERFORMANCE ANALYSIS OF A RANDOM SEARCH ALGORITHM FOR DISTRIBUTED AUTONOMOUS MOBILE ROBOTS CHENG CHEE KONG NATIONAL UNIVERSITY OF SINGAPORE 24 PERFORMANCE ANALYSIS OF A RANDOM SEARCH ALGORITHM FOR DISTRIBUTED
PERFORMANCE ANALYSIS OF A RANDOM SEARCH ALGORITHM FOR DISTRIBUTED AUTONOMOUS MOBILE ROBOTS CHENG CHEE KONG NATIONAL UNIVERSITY OF SINGAPORE 24 PERFORMANCE ANALYSIS OF A RANDOM SEARCH ALGORITHM FOR DISTRIBUTED
Whistling in the Dark: Cooperative Trail Following in Uncertain Localization Space
 Whistling in the Dark: Cooperative Trail Following in Uncertain Localization Space Richard T. Vaughan, Kasper Støy, Gaurav S. Sukhatme and Maja J. Matarić Robotics Research Laboratories University of Southern
Whistling in the Dark: Cooperative Trail Following in Uncertain Localization Space Richard T. Vaughan, Kasper Støy, Gaurav S. Sukhatme and Maja J. Matarić Robotics Research Laboratories University of Southern
Performance Evaluation of a Multi-Robot Search & Retrieval System: Experiences with MinDART
 Performance Evaluation of a Multi-Robot Search & Retrieval System: Experiences with MinDART Paul E. Rybski, Amy Larson, Harini Veeraraghavan, Monica Anderson LaPoint, and Maria Gini Department of Computer
Performance Evaluation of a Multi-Robot Search & Retrieval System: Experiences with MinDART Paul E. Rybski, Amy Larson, Harini Veeraraghavan, Monica Anderson LaPoint, and Maria Gini Department of Computer
A Multi-Robot Coverage Approach based on Stigmergic Communication
 A Multi-Robot Coverage Approach based on Stigmergic Communication Bijan Ranjbar-Sahraei 1, Gerhard Weiss 1, and Ali Nakisaei 2 1 Dept. of Knowledge Engineering, Maastricht University, The Netherlands 2
A Multi-Robot Coverage Approach based on Stigmergic Communication Bijan Ranjbar-Sahraei 1, Gerhard Weiss 1, and Ali Nakisaei 2 1 Dept. of Knowledge Engineering, Maastricht University, The Netherlands 2
Embodiment from Engineer s Point of View
 New Trends in CS Embodiment from Engineer s Point of View Andrej Lúčny Department of Applied Informatics FMFI UK Bratislava lucny@fmph.uniba.sk www.microstep-mis.com/~andy 1 Cognitivism Cognitivism is
New Trends in CS Embodiment from Engineer s Point of View Andrej Lúčny Department of Applied Informatics FMFI UK Bratislava lucny@fmph.uniba.sk www.microstep-mis.com/~andy 1 Cognitivism Cognitivism is
The Necessity of Average Rewards in Cooperative Multirobot Learning
 Carnegie Mellon University Research Showcase @ CMU Institute for Software Research School of Computer Science 2002 The Necessity of Average Rewards in Cooperative Multirobot Learning Poj Tangamchit Carnegie
Carnegie Mellon University Research Showcase @ CMU Institute for Software Research School of Computer Science 2002 The Necessity of Average Rewards in Cooperative Multirobot Learning Poj Tangamchit Carnegie
Review of Soft Computing Techniques used in Robotics Application
 International Journal of Information and Computation Technology. ISSN 0974-2239 Volume 3, Number 3 (2013), pp. 101-106 International Research Publications House http://www. irphouse.com /ijict.htm Review
International Journal of Information and Computation Technology. ISSN 0974-2239 Volume 3, Number 3 (2013), pp. 101-106 International Research Publications House http://www. irphouse.com /ijict.htm Review
Towards Artificial ATRON Animals: Scalable Anatomy for Self-Reconfigurable Robots
 Towards Artificial ATRON Animals: Scalable Anatomy for Self-Reconfigurable Robots David J. Christensen, David Brandt & Kasper Støy Robotics: Science & Systems Workshop on Self-Reconfigurable Modular Robots
Towards Artificial ATRON Animals: Scalable Anatomy for Self-Reconfigurable Robots David J. Christensen, David Brandt & Kasper Støy Robotics: Science & Systems Workshop on Self-Reconfigurable Modular Robots