biologically-inspired computing lecture 20 Informatics luis rocha 2015 biologically Inspired computing INDIANA UNIVERSITY
|
|
|
- Maude Hawkins
- 5 years ago
- Views:
Transcription


1 lecture 20 -inspired
 Introduction to Python (No Assignment) Lab 1 : January 28 th Measuring Information (Assignment 1) Graded Lab 2 : February 11 th L-Systems (Assignment 2) Graded Lab 3: March 25 th Cellular")
2 Sections I485/H400 course outlook Assignments: 35% Students will complete 4/5 assignments based on algorithms presented in class Lab meets in I1 (West) 109 on Lab Wednesdays Lab 0 : January 14 th (completed) Introduction to Python (No Assignment) Lab 1 : January 28 th Measuring Information (Assignment 1) Graded Lab 2 : February 11 th L-Systems (Assignment 2) Graded Lab 3: March 25 th Cellular Automata & Boolean Networks (Assignment 3) Graded Lab 4: April 8 th Genetic Algorithms (Assignment 4) Due: April 22 nd Lab 5: April 22 nd Ant Clustering Algorithm (Assignment 5) Due May 4 th
![Readings until now Class Book Nunes de Castro, Leandro [2006].](/docs-images/82/85802037/images/3-2.jpg "Fundamentals of Natural Computing: Basic Concepts, Algorithms, and Applications. Chapman & Hall.")

3 Readings until now Class Book Nunes de Castro, Leandro [2006]. Fundamentals of Natural Computing: Basic Concepts, Algorithms, and Applications. Chapman & Hall. Chapters 1,2,3,7,8 Chapter 5, all sections Section 7.7, 8.3.1,8.3.6, Lecture notes Chapter 1: What is Life? Chapter 2: The Logical Mechanisms of Life Chapter 3: Formalizing and Modeling the World Chapter 4: Self-Organization and Emergent Complex Behavior Chapter 5: Reality is Stranger than Fiction posted
")

 http://www.springer.")

4 final project schedule ALIFE 15 Projects Due by May 4 th in Oncourse ALIFE 15 (14) Actual conference due date: pages (LNCS proceedings format) D= Preliminary ideas overdue! Individual or group With very definite tasks assigned per member of group




5 Flocking Behavior Boids by Craig Reynolds (1986) 3 Steering behaviors Alignment: move towards the average heading of local flockmates Adjust velocity direction according to others in vicinity Separation: steer to avoid crowding local flockmates Maintain minimum distance to others (adjusting speed) Cohesion: steer to move toward the average position of local flockmates Adjust velocity direction according to others in vicinity Each boid sees only flockmates within a certain small neighborhood around itself.


6 Separation: maintain minimum distance adjusting speed Boid rules Figures by Rudy Rucker in Artificial Life Lab.
7 velocity vector update Boid rules Alignment: steer towards the average heading of local flockmates Cohesion: steer to move toward the average position of local flockmates Figure by Rudy Rucker in Artificial Life Lab.
8 Flocking Behavior Boids by Craig Reynolds (1986) 3 Steering behaviors Separation: steer to avoid crowding local flockmates Maintain minimum distance to others (speed adjustment) Alignment: move towards the average heading of local flockmates Adjust velocity according to others in vicinity Cohesion: steer to move toward the average position of local flockmates



9 Batman Returns to simulate bats and penquins Cliffhanger Simulation of bats Jurassic Park Simulation of gallamunus herd The Lion King Scene of wildbeast stampede Jumanji Stampede of zoo animals Star Trek Voyager "Elogium Simulation a swarm of space creatures Boids Used in Movies


10 based on boids flocking robots Cybernetic Intelligence Research Group, University of Reading, England Intelligent Autonomous Systems Laboratory. University of the West of England.


11 social flocking Search by flocking Social flocks looking for good positions Metaphor: food, resources Agents flock according to social knowledge of Their best position so far The best position of the swarm or local neighbors Not necessarily neighbors in search space but in some social structure (e.g. one dimensional lattice) Algorithm Generate a random population of particles x i (t) --- vector of variables (similar to genotypes) The position of agent i is x i moving with velocity vector v i x i (t+1) = x i (t) + v i (t + 1) Velocity update rule w : inertial constant c 1 and c 2 : constants r 1 and r 2 : random values in [0,1] particle swarm optimization (PSO) xˆ x( t) c. r xˆ ( ) v( t 1) w. v( t) c. r1 2 2 s x 1 t Agent best so far (cognitive term) x Swarm best (social term)
 1.")



12 The workings particle swarm optimization (PSO) 1. Generate random population of particles in search space 2. Generate random velocity vectors for each particle 3. Repeat (t++) For every particle i in population If f x i t f ˆx i then xˆ i x i t Compute xˆ s v( t 1) w. v( t) c. r ˆ ( ). ˆ 1 x x t c2 r2 xs x( x( t 1) x( t) v( t 1) 4. Until maximum iterations ) 1 t

13 dumb agents, intelligent collective swarm intelligence Bio-inspired methodology for solving distributed problems biological examples social insects ants, termites, bees, wasps swarming, flocking, herding behaviors in vertebrates. Collective behavior algorithms Distributed or decentralized control No central control or agent Local communication among agents Self-organization Simple agents, complicated emergent behavior Robust To individual loss Adaptive and Flexible Capability to respond to perturbations



14 antz Z-4195: Why'd I have to be born a worker? You soldiers get all the glory. Plus, you get to go out in the world. You know, you meet interesting insects; you get to kill them. Weaver: Yeah, but you get to spend all day with those beautiful worker girls. Z-4195: Weaver, they're CAREER girls. They're obsessed with digging. Z-4195 I'm supposed to do everything for the colony? What about my needs?
15 stigma + ergon = mark + work Process of communication by changing environment Pheromone trails Nest Building Termites use a simple rule: Each agent scoops up a 'mudball' and covers it with pheromones Others are attracted by pheromone and are therefore more likely to drop their own mudballs near their neighbors Introduced by Pierre-Paul Grassé in 1959 "Stimulation of workers by the performance they have achieved. Regulation of behavior (and constructions) is dependent on the behavior of others and the environment they build Worker is guided by work Used in optimization algorithms Stigmergy: Ant colony algorithms Flocking behavior: Particle Swarm Optimization stigmergy
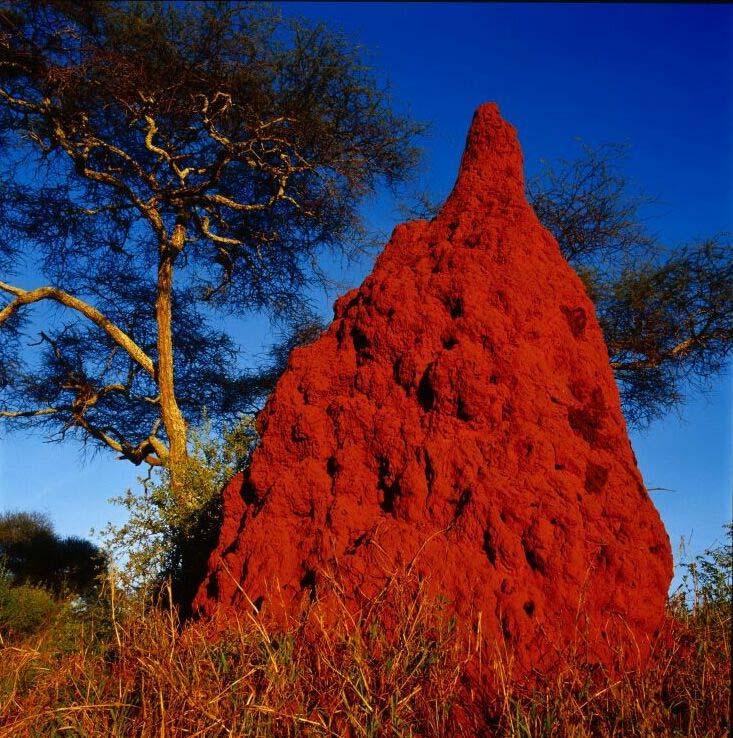
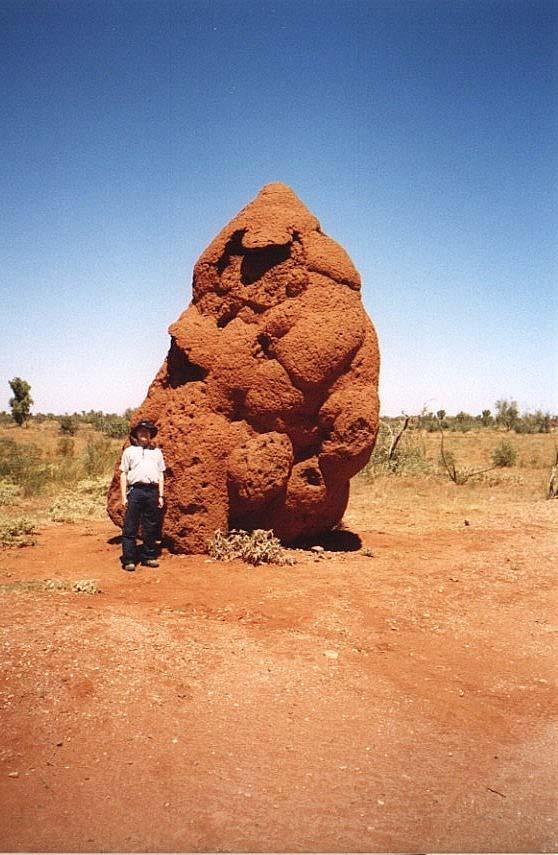
16 natural achievements termite mounds

17 natural architecture From Guy Theraulaz wasp nests Typical tasks for social insects: find appropriate place to build nest, build and maintain nest, task allocation,feed colony, find food, respond to challenges, send an alarm, etc.
 If carrying a wood chip, drop it and wander Else, pick up chip and wander Figure by Gary Flake in The Computational Beauty of")
18 Aimless bots termites Very simple Agents that primarily wander around randomly Mitchell Resnick Rules Wander aimlessly until bumping into a wood chip (Random walk) If carrying a wood chip, drop it and wander Else, pick up chip and wander Figure by Gary Flake in The Computational Beauty of Nature.
 and wander. Drop dead ant.")
19 Probabilistic cleaning Very simple rules for colony clean up Pick dead ant. if a dead ant is found pick it up (with probability inversely proportional to the quantity of dead ants in vicinity) and wander. Drop dead ant. If dead ants are found, drop ant (with probability proportional to the quantity of dead ants in vicinity) and wander. ants Figure by Marco Dorigo in Real ants inspire ant algorithms See Also: J. L. Deneubourg, S. Goss, N. Franks, A. Sendova-Franks, C. Detrain, L. Chretien. The Dynamics of Collective Sorting Robot-Like Ants and Ant-Like Robots. From Animals to Animats: Proc. of the 1st Int. Conf. on Simulation of Adaptive Behaviour (1990).
 If shovel contains 3 or more objects, sensor is activated and objects are dropped.")
20 Clustering by collective or swarm robots ant-inspired robots Becker et al Rules Move: with no sensor activated move in straight line Obstacle avoidance: if obstacle is found, turn with a random angle to avoid it and move. Pick up and drop: Robots can pick up a number of objects (up to 3) If shovel contains 3 or more objects, sensor is activated and objects are dropped. Robot backs up, chooses new angle and moves. Results in clustering The probability of dropping items increases with quantity of items in vicinity Figure from R Beckers, OE Holland, and JL Deneubourg [1994]. From local actions to global tasks: Stigmergy and collective robotics. In Artificial Life IV.

21 becker et al experiments
22
23

![Pasteels [1989].](/docs-images/82/85802037/images/24-2.jpg "Self-organized")

24 S Goss, S Aron, JL Deneubourg, JM Pasteels [1989]. Self-organized shortcuts in the Argentine ant. Naturwissenschaften, 76:

25 stigmergy at work: ant colony optimization foraging, routing, and optimization J.L. Deneubourg, S. Aron, S. Goss, J.M. Pasteels [1990 ] The selforganizing exploratory pattern of the argentine ant. Journal of Insect Behavior. After an initial transitory phase lasting few minutes during which some oscillations can appear, ants tend to converge on the same path
26 stigmergy at work S Goss, S Aron, JL Deneubourg, JM Pasteels [1989]. Self-organized shortcuts in the Argentine ant. Naturwissenschaften, 76, pp foraging, routing, and optimization
 and wander. Drop dead ant.")
27 based on dead body cleaning ant clustering algorithm (ACA) Very simple rules for colony clean up Pick dead ant. if a dead ant is found pick it up (with probability inversely proportional to the quantity of dead ants in vicinity) and wander. Drop dead ant. If dead ants are found, drop ant (with probability proportional to the quantity of dead ants in vicinity) and wander. Data vector: X x 1 x 2 x 3 x n-1 x n x 1 x 2 x 3 x n-1 x n Lumer, E. D. and Faieta, B Diversity and adaptation in populations of clustering ants. In From Animals To Animats 3, pp x 1 x 2 x 3 x n-1 x n Cluster data (N samples) according to ant clean up rules
![readings Next lectures Class Book Nunes de Castro, Leandro [2006]. Fundamentals of Natural Computing: Basic Concepts, Algorithms, and Applications.](/docs-images/82/85802037/images/28-4.jpg "Chapman & Hall. Chapter 5, all sections Section 7.7, 8.3.1,8.3.6,8.3.8-10 Lecture notes Chapter 1: What is Life?")

28 readings Next lectures Class Book Nunes de Castro, Leandro [2006]. Fundamentals of Natural Computing: Basic Concepts, Algorithms, and Applications. Chapman & Hall. Chapter 5, all sections Section 7.7, 8.3.1,8.3.6, Lecture notes Chapter 1: What is Life? Chapter 2: The logical Mechanisms of Life Chapter 3: Formalizing and Modeling the World Chapter 4: Self-Organization and Emergent Complex Behavior Chapter 5: Reality is Stranger than Fiction posted Optional materials Scientific American: Special Issue on the evolution of Evolution, January 2009.
1) Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg)
 Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg)") 1) Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg) 6) Virtual Ecosystems & Perspectives (sb) Inspired
1) Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg) 6) Virtual Ecosystems & Perspectives (sb) Inspired
SWARM ROBOTICS: PART 2. Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St.
 SWARM ROBOTICS: PART 2 Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St. John s, Canada PRINCIPLE: SELF-ORGANIZATION 2 SELF-ORGANIZATION Self-organization
SWARM ROBOTICS: PART 2 Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St. John s, Canada PRINCIPLE: SELF-ORGANIZATION 2 SELF-ORGANIZATION Self-organization
SWARM ROBOTICS: PART 2
 SWARM ROBOTICS: PART 2 PRINCIPLE: SELF-ORGANIZATION Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St. John s, Canada 2 SELF-ORGANIZATION SO in Non-Biological
SWARM ROBOTICS: PART 2 PRINCIPLE: SELF-ORGANIZATION Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St. John s, Canada 2 SELF-ORGANIZATION SO in Non-Biological
SWARM INTELLIGENCE. Mario Pavone Department of Mathematics & Computer Science University of Catania
 Worker Ant #1: I'm lost! Where's the line? What do I do? Worker Ant #2: Help! Worker Ant #3: We'll be stuck here forever! Mr. Soil: Do not panic, do not panic. We are trained professionals. Now, stay calm.
Worker Ant #1: I'm lost! Where's the line? What do I do? Worker Ant #2: Help! Worker Ant #3: We'll be stuck here forever! Mr. Soil: Do not panic, do not panic. We are trained professionals. Now, stay calm.
Collective Robotics. Marcin Pilat
 Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Sorting in Swarm Robots Using Communication-Based Cluster Size Estimation
 Sorting in Swarm Robots Using Communication-Based Cluster Size Estimation Hongli Ding and Heiko Hamann Department of Computer Science, University of Paderborn, Paderborn, Germany hongli.ding@uni-paderborn.de,
Sorting in Swarm Robots Using Communication-Based Cluster Size Estimation Hongli Ding and Heiko Hamann Department of Computer Science, University of Paderborn, Paderborn, Germany hongli.ding@uni-paderborn.de,
An Introduction to Swarm Intelligence Issues
 An Introduction to Swarm Intelligence Issues Gianni Di Caro gianni@idsia.ch IDSIA, USI/SUPSI, Lugano (CH) 1 Topics that will be discussed Basic ideas behind the notion of Swarm Intelligence The role of
An Introduction to Swarm Intelligence Issues Gianni Di Caro gianni@idsia.ch IDSIA, USI/SUPSI, Lugano (CH) 1 Topics that will be discussed Basic ideas behind the notion of Swarm Intelligence The role of
Swarm Robotics. Clustering and Sorting
 Swarm Robotics Clustering and Sorting By Andrew Vardy Associate Professor Computer Science / Engineering Memorial University of Newfoundland St. John s, Canada Deneubourg JL, Goss S, Franks N, Sendova-Franks
Swarm Robotics Clustering and Sorting By Andrew Vardy Associate Professor Computer Science / Engineering Memorial University of Newfoundland St. John s, Canada Deneubourg JL, Goss S, Franks N, Sendova-Franks
Biological Inspirations for Distributed Robotics. Dr. Daisy Tang
 Biological Inspirations for Distributed Robotics Dr. Daisy Tang Outline Biological inspirations Understand two types of biological parallels Understand key ideas for distributed robotics obtained from
Biological Inspirations for Distributed Robotics Dr. Daisy Tang Outline Biological inspirations Understand two types of biological parallels Understand key ideas for distributed robotics obtained from
A Genetic Algorithm-Based Controller for Decentralized Multi-Agent Robotic Systems
 A Genetic Algorithm-Based Controller for Decentralized Multi-Agent Robotic Systems Arvin Agah Bio-Robotics Division Mechanical Engineering Laboratory, AIST-MITI 1-2 Namiki, Tsukuba 305, JAPAN agah@melcy.mel.go.jp
A Genetic Algorithm-Based Controller for Decentralized Multi-Agent Robotic Systems Arvin Agah Bio-Robotics Division Mechanical Engineering Laboratory, AIST-MITI 1-2 Namiki, Tsukuba 305, JAPAN agah@melcy.mel.go.jp
Biologically-inspired Autonomic Wireless Sensor Networks. Haoliang Wang 12/07/2015
 Biologically-inspired Autonomic Wireless Sensor Networks Haoliang Wang 12/07/2015 Wireless Sensor Networks A collection of tiny and relatively cheap sensor nodes Low cost for large scale deployment Limited
Biologically-inspired Autonomic Wireless Sensor Networks Haoliang Wang 12/07/2015 Wireless Sensor Networks A collection of tiny and relatively cheap sensor nodes Low cost for large scale deployment Limited
INFORMATION AND COMMUNICATION TECHNOLOGIES IMPROVING EFFICIENCIES WAYFINDING SWARM CREATURES EXPLORING THE 3D DYNAMIC VIRTUAL WORLDS
 INFORMATION AND COMMUNICATION TECHNOLOGIES IMPROVING EFFICIENCIES Refereed Paper WAYFINDING SWARM CREATURES EXPLORING THE 3D DYNAMIC VIRTUAL WORLDS University of Sydney, Australia jyoo6711@arch.usyd.edu.au
INFORMATION AND COMMUNICATION TECHNOLOGIES IMPROVING EFFICIENCIES Refereed Paper WAYFINDING SWARM CREATURES EXPLORING THE 3D DYNAMIC VIRTUAL WORLDS University of Sydney, Australia jyoo6711@arch.usyd.edu.au
Swarm Intelligence. Corey Fehr Merle Good Shawn Keown Gordon Fedoriw
 Swarm Intelligence Corey Fehr Merle Good Shawn Keown Gordon Fedoriw Ants in the Pants! An Overview Real world insect examples Theory of Swarm Intelligence From Insects to Realistic A.I. Algorithms Examples
Swarm Intelligence Corey Fehr Merle Good Shawn Keown Gordon Fedoriw Ants in the Pants! An Overview Real world insect examples Theory of Swarm Intelligence From Insects to Realistic A.I. Algorithms Examples
Sequential Task Execution in a Minimalist Distributed Robotic System
 Sequential Task Execution in a Minimalist Distributed Robotic System Chris Jones Maja J. Matarić Computer Science Department University of Southern California 941 West 37th Place, Mailcode 0781 Los Angeles,
Sequential Task Execution in a Minimalist Distributed Robotic System Chris Jones Maja J. Matarić Computer Science Department University of Southern California 941 West 37th Place, Mailcode 0781 Los Angeles,
PSYCO 457 Week 9: Collective Intelligence and Embodiment
 PSYCO 457 Week 9: Collective Intelligence and Embodiment Intelligent Collectives Cooperative Transport Robot Embodiment and Stigmergy Robots as Insects Emergence The world is full of examples of intelligence
PSYCO 457 Week 9: Collective Intelligence and Embodiment Intelligent Collectives Cooperative Transport Robot Embodiment and Stigmergy Robots as Insects Emergence The world is full of examples of intelligence
SWARM-BOT: A Swarm of Autonomous Mobile Robots with Self-Assembling Capabilities
 SWARM-BOT: A Swarm of Autonomous Mobile Robots with Self-Assembling Capabilities Francesco Mondada 1, Giovanni C. Pettinaro 2, Ivo Kwee 2, André Guignard 1, Luca Gambardella 2, Dario Floreano 1, Stefano
SWARM-BOT: A Swarm of Autonomous Mobile Robots with Self-Assembling Capabilities Francesco Mondada 1, Giovanni C. Pettinaro 2, Ivo Kwee 2, André Guignard 1, Luca Gambardella 2, Dario Floreano 1, Stefano
Probabilistic Modelling of a Bio-Inspired Collective Experiment with Real Robots
 Probabilistic Modelling of a Bio-Inspired Collective Experiment with Real Robots A. Martinoli, and F. Mondada Microcomputing Laboratory, Swiss Federal Institute of Technology IN-F Ecublens, CH- Lausanne
Probabilistic Modelling of a Bio-Inspired Collective Experiment with Real Robots A. Martinoli, and F. Mondada Microcomputing Laboratory, Swiss Federal Institute of Technology IN-F Ecublens, CH- Lausanne
Agent-based modelling using MATLAB
 Agent-based modelling using MATLAB Shan He School for Computational Science University of Birmingham Module 06-23836: Computational Modelling with MATLAB Outline Outline of Topics Concepts about Agent-based
Agent-based modelling using MATLAB Shan He School for Computational Science University of Birmingham Module 06-23836: Computational Modelling with MATLAB Outline Outline of Topics Concepts about Agent-based
FROM LOCAL ACTIONS TO GLOBAL TASKS: STIGMERGY AND COLLECTIVE ROBOTICS
 FROM LOCAL ACTIONS TO GLOBAL TASKS: STIGMERGY AND COLLECTIVE ROBOTICS R. Beckers 1,2, O.E. Holland 1,3 and J.L. Deneubourg 2 1 ZiF-Universität Bielefeld, Wellenberg 1, D-33615 Bielefeld 2 Centre for non-linear
FROM LOCAL ACTIONS TO GLOBAL TASKS: STIGMERGY AND COLLECTIVE ROBOTICS R. Beckers 1,2, O.E. Holland 1,3 and J.L. Deneubourg 2 1 ZiF-Universität Bielefeld, Wellenberg 1, D-33615 Bielefeld 2 Centre for non-linear
Design of Adaptive Collective Foraging in Swarm Robotic Systems
 Western Michigan University ScholarWorks at WMU Dissertations Graduate College 5-2010 Design of Adaptive Collective Foraging in Swarm Robotic Systems Hanyi Dai Western Michigan University Follow this and
Western Michigan University ScholarWorks at WMU Dissertations Graduate College 5-2010 Design of Adaptive Collective Foraging in Swarm Robotic Systems Hanyi Dai Western Michigan University Follow this and
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization
 Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
From Tom Thumb to the Dockers: Some Experiments with Foraging Robots
 From Tom Thumb to the Dockers: Some Experiments with Foraging Robots Alexis Drogoul, Jacques Ferber LAFORIA, Boîte 169,Université Paris VI, 75252 PARIS CEDEX O5 FRANCE drogoul@laforia.ibp.fr, ferber@laforia.ibp.fr
From Tom Thumb to the Dockers: Some Experiments with Foraging Robots Alexis Drogoul, Jacques Ferber LAFORIA, Boîte 169,Université Paris VI, 75252 PARIS CEDEX O5 FRANCE drogoul@laforia.ibp.fr, ferber@laforia.ibp.fr
A Bio-inspired Multi-Robot Coordination Approach
 A Bio-inspired Multi-Robot Coordination Approach Yan Meng, Ọlọrundamilọla Kazeem and Jing Gan Department of Electrical and Computer Engineering Stevens Institute of Technology, Hoboen, NJ 07030 yan.meng@stevens.edu,
A Bio-inspired Multi-Robot Coordination Approach Yan Meng, Ọlọrundamilọla Kazeem and Jing Gan Department of Electrical and Computer Engineering Stevens Institute of Technology, Hoboen, NJ 07030 yan.meng@stevens.edu,
Formica ex Machina: Ant Swarm Foraging from Physical to Virtual and Back Again
 Formica ex Machina: Ant Swarm Foraging from Physical to Virtual and Back Again Joshua P. Hecker 1, Kenneth Letendre 1,2, Karl Stolleis 1, Daniel Washington 1, and Melanie E. Moses 1,2 1 Department of Computer
Formica ex Machina: Ant Swarm Foraging from Physical to Virtual and Back Again Joshua P. Hecker 1, Kenneth Letendre 1,2, Karl Stolleis 1, Daniel Washington 1, and Melanie E. Moses 1,2 1 Department of Computer
In vivo, in silico, in machina: ants and robots balance memory and communication to collectively exploit information
 In vivo, in silico, in machina: ants and robots balance memory and communication to collectively exploit information Melanie E. Moses, Kenneth Letendre, Joshua P. Hecker, Tatiana P. Flanagan Department
In vivo, in silico, in machina: ants and robots balance memory and communication to collectively exploit information Melanie E. Moses, Kenneth Letendre, Joshua P. Hecker, Tatiana P. Flanagan Department
Crowd-steering behaviors Using the Fame Crowd Simulation API to manage crowds Exploring ANT-Op to create more goal-directed crowds
 In this chapter, you will learn how to build large crowds into your game. Instead of having the crowd members wander freely, like we did in the previous chapter, we will control the crowds better by giving
In this chapter, you will learn how to build large crowds into your game. Instead of having the crowd members wander freely, like we did in the previous chapter, we will control the crowds better by giving
Review of Soft Computing Techniques used in Robotics Application
 International Journal of Information and Computation Technology. ISSN 0974-2239 Volume 3, Number 3 (2013), pp. 101-106 International Research Publications House http://www. irphouse.com /ijict.htm Review
International Journal of Information and Computation Technology. ISSN 0974-2239 Volume 3, Number 3 (2013), pp. 101-106 International Research Publications House http://www. irphouse.com /ijict.htm Review
Swarm Robotics. Lecturer: Roderich Gross
 Swarm Robotics Lecturer: Roderich Gross 1 Outline Why swarm robotics? Example domains: Coordinated exploration Transportation and clustering Reconfigurable robots Summary Stigmergy revisited 2 Sources
Swarm Robotics Lecturer: Roderich Gross 1 Outline Why swarm robotics? Example domains: Coordinated exploration Transportation and clustering Reconfigurable robots Summary Stigmergy revisited 2 Sources
IJSRD - International Journal for Scientific Research & Development Vol. 5, Issue 05, 2017 ISSN (online):
:") IJSRD - International Journal for Scientific Research & Development Vol. 5, Issue 05, 2017 ISSN (online): 2321-0613 Study: Evolution of Nature Inspired Algorithms in Various Application Domains Harshita
IJSRD - International Journal for Scientific Research & Development Vol. 5, Issue 05, 2017 ISSN (online): 2321-0613 Study: Evolution of Nature Inspired Algorithms in Various Application Domains Harshita
KOVAN Dept. of Computer Eng. Middle East Technical University Ankara, Turkey
 Swarm Robotics: From sources of inspiration to domains of application Erol Sahin KOVAN Dept. of Computer Eng. Middle East Technical University Ankara, Turkey http://www.kovan.ceng.metu.edu.tr What is Swarm
Swarm Robotics: From sources of inspiration to domains of application Erol Sahin KOVAN Dept. of Computer Eng. Middle East Technical University Ankara, Turkey http://www.kovan.ceng.metu.edu.tr What is Swarm
Expert Assessment of Stigmergy: A Report for the Department of National Defence
 Expert Assessment of Stigmergy: A Report for the Department of National Defence Contract No. File No. Client Reference No.: W7714-040899/003/SV 011 sv.w7714-040899 W7714-4-0899 Requisition No. W7714-040899
Expert Assessment of Stigmergy: A Report for the Department of National Defence Contract No. File No. Client Reference No.: W7714-040899/003/SV 011 sv.w7714-040899 W7714-4-0899 Requisition No. W7714-040899
Swarm Intelligence. Rod Goodman 2008 Carnegie Centenary Professor Edinburgh University Scotland 27 th August 2008
 Swarm Intelligence Rod Goodman 2008 Carnegie Centenary Professor Edinburgh University Scotland 27 th August 2008 Acknowledgements This talk describes the work of many good friends and colleagues, in particular:
Swarm Intelligence Rod Goodman 2008 Carnegie Centenary Professor Edinburgh University Scotland 27 th August 2008 Acknowledgements This talk describes the work of many good friends and colleagues, in particular:
Multiagent systems: Lessons from social insects and collective
 Multiagent systems: Lessons from social insects and collective robotics O.E.Holland Intelligent Autonomous Systems Laboratory Faculty of Engineering [Jniversity of the West of England Bristol BS16 1QY
Multiagent systems: Lessons from social insects and collective robotics O.E.Holland Intelligent Autonomous Systems Laboratory Faculty of Engineering [Jniversity of the West of England Bristol BS16 1QY
Artificial Intelligence. Cameron Jett, William Kentris, Arthur Mo, Juan Roman
 Artificial Intelligence Cameron Jett, William Kentris, Arthur Mo, Juan Roman AI Outline Handicap for AI Machine Learning Monte Carlo Methods Group Intelligence Incorporating stupidity into game AI overview
Artificial Intelligence Cameron Jett, William Kentris, Arthur Mo, Juan Roman AI Outline Handicap for AI Machine Learning Monte Carlo Methods Group Intelligence Incorporating stupidity into game AI overview
Shuffled Complex Evolution
 Shuffled Complex Evolution Shuffled Complex Evolution An Evolutionary algorithm That performs local and global search A solution evolves locally through a memetic evolution (Local search) This local search
Shuffled Complex Evolution Shuffled Complex Evolution An Evolutionary algorithm That performs local and global search A solution evolves locally through a memetic evolution (Local search) This local search
Contact information. Tony White, Associate Professor
 Contact information Tony White, Associate Professor Office: Hertzberg 5354 Tel: 520-2600 x2208 Fax: 520-4334 E-mail: arpwhite@scs.carleton.ca E-mail: arpwhite@hotmail.com Web: http://www.scs.carleton.ca/~arpwhite
Contact information Tony White, Associate Professor Office: Hertzberg 5354 Tel: 520-2600 x2208 Fax: 520-4334 E-mail: arpwhite@scs.carleton.ca E-mail: arpwhite@hotmail.com Web: http://www.scs.carleton.ca/~arpwhite
A NEW APPROACH TO GLOBAL OPTIMIZATION MOTIVATED BY PARLIAMENTARY POLITICAL COMPETITIONS. Ali Borji. Mandana Hamidi
 International Journal of Innovative Computing, Information and Control ICIC International c 2008 ISSN 1349-4198 Volume x, Number 0x, x 2008 pp. 0 0 A NEW APPROACH TO GLOBAL OPTIMIZATION MOTIVATED BY PARLIAMENTARY
International Journal of Innovative Computing, Information and Control ICIC International c 2008 ISSN 1349-4198 Volume x, Number 0x, x 2008 pp. 0 0 A NEW APPROACH TO GLOBAL OPTIMIZATION MOTIVATED BY PARLIAMENTARY
1 Swarms A long time ago, people discovered the variety of the interesting insect or animal behaviors in the nature. A ock of birds sweeps across the
 Swarm Intelligence: Literature Overview Yang Liu and Kevin M. Passino Dept. of Electrical Engineering The Ohio State University 2015 Neil Ave. Columbus, OH 43210 Tel: (614)292-5716, fax: (614)292-7596
Swarm Intelligence: Literature Overview Yang Liu and Kevin M. Passino Dept. of Electrical Engineering The Ohio State University 2015 Neil Ave. Columbus, OH 43210 Tel: (614)292-5716, fax: (614)292-7596
Self-Organised Task Allocation in a Group of Robots
 Self-Organised Task Allocation in a Group of Robots Thomas H. Labella, Marco Dorigo and Jean-Louis Deneubourg Technical Report No. TR/IRIDIA/2004-6 November 30, 2004 Published in R. Alami, editor, Proceedings
Self-Organised Task Allocation in a Group of Robots Thomas H. Labella, Marco Dorigo and Jean-Louis Deneubourg Technical Report No. TR/IRIDIA/2004-6 November 30, 2004 Published in R. Alami, editor, Proceedings
Laps to Criterion 160. Pheromone Duration (min)
") Experiments in Path Optimization via Pheromone Trails by Simulated Robots Jason L. Almeter y September 17, 1996 Abstract Ants lay pheromone trails to lead other individuals to a destination. Due to stochastic
Experiments in Path Optimization via Pheromone Trails by Simulated Robots Jason L. Almeter y September 17, 1996 Abstract Ants lay pheromone trails to lead other individuals to a destination. Due to stochastic
Multi-Robot Coordination. Chapter 11
 Multi-Robot Coordination Chapter 11 Objectives To understand some of the problems being studied with multiple robots To understand the challenges involved with coordinating robots To investigate a simple
Multi-Robot Coordination Chapter 11 Objectives To understand some of the problems being studied with multiple robots To understand the challenges involved with coordinating robots To investigate a simple
Investigation of Navigating Mobile Agents in Simulation Environments
 Investigation of Navigating Mobile Agents in Simulation Environments Theses of the Doctoral Dissertation Richárd Szabó Department of Software Technology and Methodology Faculty of Informatics Loránd Eötvös
Investigation of Navigating Mobile Agents in Simulation Environments Theses of the Doctoral Dissertation Richárd Szabó Department of Software Technology and Methodology Faculty of Informatics Loránd Eötvös
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Prof. Habiba Drias Laboratoire de Recherche en Intelligence Artificielle LRIA Computer Science Department USTHB Algiers Algeria
 Swarm Intelligence and Evolutionary Algorithms Habiba Drias Wikipedia.org Prof. Habiba Drias Laboratoire de Recherche en Intelligence Artificielle LRIA Computer Science Department USTHB Algiers Algeria
Swarm Intelligence and Evolutionary Algorithms Habiba Drias Wikipedia.org Prof. Habiba Drias Laboratoire de Recherche en Intelligence Artificielle LRIA Computer Science Department USTHB Algiers Algeria
CHAPTER 5 PSO AND ACO BASED PID CONTROLLER
 128 CHAPTER 5 PSO AND ACO BASED PID CONTROLLER 5.1 INTRODUCTION The quality and stability of the power supply are the important factors for the generating system. To optimize the performance of electrical
128 CHAPTER 5 PSO AND ACO BASED PID CONTROLLER 5.1 INTRODUCTION The quality and stability of the power supply are the important factors for the generating system. To optimize the performance of electrical
Robotic Systems ECE 401RB Fall 2007
 The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
Speed control of switched reluctance motor using genetic algorithm and ant colony based on optimizing PID controller
 Speed control of switched reluctance motor using genetic algorithm and ant colony based on optimizing PID controller HASSAN EL-SAYED AHMED IBRAHIM, MOHAMED SAID SAYED AHMED, KHALED MOHAMED AWAD Electrical
Speed control of switched reluctance motor using genetic algorithm and ant colony based on optimizing PID controller HASSAN EL-SAYED AHMED IBRAHIM, MOHAMED SAID SAYED AHMED, KHALED MOHAMED AWAD Electrical
Interactive Surface for Bio-inspired Robotics, Re-examining Foraging Models
 Interactive Surface for Bio-inspired Robotics, Re-examining Foraging Models Olivier Simonin, Thomas Huraux, François Charpillet Université Henri Poincaré and INRIA Nancy Grand Est MAIA team, LORIA Laboratory
Interactive Surface for Bio-inspired Robotics, Re-examining Foraging Models Olivier Simonin, Thomas Huraux, François Charpillet Université Henri Poincaré and INRIA Nancy Grand Est MAIA team, LORIA Laboratory
NASA Swarmathon Team ABC (Artificial Bee Colony)
") NASA Swarmathon Team ABC (Artificial Bee Colony) Cheylianie Rivera Maldonado, Kevin Rolón Domena, José Peña Pérez, Aníbal Robles, Jonathan Oquendo, Javier Olmo Martínez University of Puerto Rico at Arecibo
NASA Swarmathon Team ABC (Artificial Bee Colony) Cheylianie Rivera Maldonado, Kevin Rolón Domena, José Peña Pérez, Aníbal Robles, Jonathan Oquendo, Javier Olmo Martínez University of Puerto Rico at Arecibo
List of Figures List of Tables. Chapter 1: Introduction 1
 Contents List of Figures List of Tables iii viii Chapter 1: Introduction 1 Chapter 2: Study of Pedestrian Behaviors in Urban Space 8 2.1 Effects of Space Configuration and Attraction on Spatial Behavior
Contents List of Figures List of Tables iii viii Chapter 1: Introduction 1 Chapter 2: Study of Pedestrian Behaviors in Urban Space 8 2.1 Effects of Space Configuration and Attraction on Spatial Behavior
Applications of Swarm Intelligence
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320 088X IJCSMC, Vol. 2, Issue.
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320 088X IJCSMC, Vol. 2, Issue.
A New Kind of Art [Based on Autonomous Collective Robotics]
![A New Kind of Art [Based on Autonomous Collective Robotics]](/thumbs/72/66623060.jpg "A New Kind of Art [Based on Autonomous Collective Robotics]") 25 A New Kind of Art [Based on Autonomous Collective Robotics] Leonel Moura and Henrique Garcia Pereira Introduction We started working with robots as art performers around the turn of the century. Other
25 A New Kind of Art [Based on Autonomous Collective Robotics] Leonel Moura and Henrique Garcia Pereira Introduction We started working with robots as art performers around the turn of the century. Other
Whistling in the Dark: Cooperative Trail Following in Uncertain Localization Space
 Whistling in the Dark: Cooperative Trail Following in Uncertain Localization Space Richard T. Vaughan, Kasper Støy, Gaurav S. Sukhatme and Maja J. Matarić Robotics Research Laboratories University of Southern
Whistling in the Dark: Cooperative Trail Following in Uncertain Localization Space Richard T. Vaughan, Kasper Støy, Gaurav S. Sukhatme and Maja J. Matarić Robotics Research Laboratories University of Southern
NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION
 Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
Comparison of Different Performance Index Factor for ABC-PID Controller
 International Journal of Electronic and Electrical Engineering. ISSN 0974-2174, Volume 7, Number 2 (2014), pp. 177-182 International Research Publication House http://www.irphouse.com Comparison of Different
International Journal of Electronic and Electrical Engineering. ISSN 0974-2174, Volume 7, Number 2 (2014), pp. 177-182 International Research Publication House http://www.irphouse.com Comparison of Different
CSCI 445 Laurent Itti. Group Robotics. Introduction to Robotics L. Itti & M. J. Mataric 1
 Introduction to Robotics CSCI 445 Laurent Itti Group Robotics Introduction to Robotics L. Itti & M. J. Mataric 1 Today s Lecture Outline Defining group behavior Why group behavior is useful Why group behavior
Introduction to Robotics CSCI 445 Laurent Itti Group Robotics Introduction to Robotics L. Itti & M. J. Mataric 1 Today s Lecture Outline Defining group behavior Why group behavior is useful Why group behavior
Improvement of Robot Path Planning Using Particle. Swarm Optimization in Dynamic Environments. with Mobile Obstacles and Target
 Advanced Studies in Biology, Vol. 3, 2011, no. 1, 43-53 Improvement of Robot Path Planning Using Particle Swarm Optimization in Dynamic Environments with Mobile Obstacles and Target Maryam Yarmohamadi
Advanced Studies in Biology, Vol. 3, 2011, no. 1, 43-53 Improvement of Robot Path Planning Using Particle Swarm Optimization in Dynamic Environments with Mobile Obstacles and Target Maryam Yarmohamadi
Control issues in cognitive networks. Marko Höyhtyä and Tao Chen CWC-VTT-Gigaseminar 4th December 2008
 Control issues in cognitive networks Marko Höyhtyä and Tao Chen CWC-VTT-Gigaseminar 4th December 2008 Outline Cognitive wireless networks Cognitive mesh Topology control Frequency selection Power control
Control issues in cognitive networks Marko Höyhtyä and Tao Chen CWC-VTT-Gigaseminar 4th December 2008 Outline Cognitive wireless networks Cognitive mesh Topology control Frequency selection Power control
MA/CS 109 Computer Science Lectures. Wayne Snyder Computer Science Department Boston University
 MA/CS 109 Lectures Wayne Snyder Department Boston University Today Artiificial Intelligence: Pro and Con Friday 12/9 AI Pro and Con continued The future of AI Artificial Intelligence Artificial Intelligence
MA/CS 109 Lectures Wayne Snyder Department Boston University Today Artiificial Intelligence: Pro and Con Friday 12/9 AI Pro and Con continued The future of AI Artificial Intelligence Artificial Intelligence
start carrying resource? >Ps since last crumb? reached goal? reached home? announce private crumbs clear private crumb list
 Blazing a trail: Insect-inspired resource transportation by a robot team Richard T. Vaughan, Kasper Stfiy, Gaurav S. Sukhatme, and Maja J. Matarić Robotics Research Laboratories, University of Southern
Blazing a trail: Insect-inspired resource transportation by a robot team Richard T. Vaughan, Kasper Stfiy, Gaurav S. Sukhatme, and Maja J. Matarić Robotics Research Laboratories, University of Southern
Ola: What Goes Up, Must Fall Down
 Ola: What Goes Up, Must Fall Down Henrik Hautop Lund Jens Aage Arendt Jakob Fredslund Luigi Pagliarini LEGO Lab InterMedia, Department of Computer Science University of Aarhus, Aabogade 34, 8200 Aarhus
Ola: What Goes Up, Must Fall Down Henrik Hautop Lund Jens Aage Arendt Jakob Fredslund Luigi Pagliarini LEGO Lab InterMedia, Department of Computer Science University of Aarhus, Aabogade 34, 8200 Aarhus
Wasp-Like Scheduling for Unit Training in Real-Time Strategy Games
 Proceedings of the Seventh AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment Wasp-Like Scheduling for Unit Training in Real-Time Strategy Games Marco Santos and Carlos Martinho
Proceedings of the Seventh AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment Wasp-Like Scheduling for Unit Training in Real-Time Strategy Games Marco Santos and Carlos Martinho
Group Transport Along a Robot Chain in a Self-Organised Robot Colony
 Intelligent Autonomous Systems 9 T. Arai et al. (Eds.) IOS Press, 2006 2006 The authors. All rights reserved. 433 Group Transport Along a Robot Chain in a Self-Organised Robot Colony Shervin Nouyan a,
Intelligent Autonomous Systems 9 T. Arai et al. (Eds.) IOS Press, 2006 2006 The authors. All rights reserved. 433 Group Transport Along a Robot Chain in a Self-Organised Robot Colony Shervin Nouyan a,
POSTDOC : THE HUMAN OPTIMIZATION
 POSTDOC : THE HUMAN OPTIMIZATION Satish Gajawada 1, 2 1 The Human, Hyderabad, Andhra Pradesh, INDIA, Planet EARTH gajawadasatish@gmail.com 2 Indian Institute of Technology, Roorkee, Uttaranchal, INDIA,
POSTDOC : THE HUMAN OPTIMIZATION Satish Gajawada 1, 2 1 The Human, Hyderabad, Andhra Pradesh, INDIA, Planet EARTH gajawadasatish@gmail.com 2 Indian Institute of Technology, Roorkee, Uttaranchal, INDIA,
BUILDING A SWARM OF ROBOTIC BEES
 World Automation Congress 2010 TSI Press. BUILDING A SWARM OF ROBOTIC BEES ALEKSANDAR JEVTIC (1), PEYMON GAZI (2), DIEGO ANDINA (1), Mo JAMSHlDI (2) (1) Group for Automation in Signal and Communications,
World Automation Congress 2010 TSI Press. BUILDING A SWARM OF ROBOTIC BEES ALEKSANDAR JEVTIC (1), PEYMON GAZI (2), DIEGO ANDINA (1), Mo JAMSHlDI (2) (1) Group for Automation in Signal and Communications,
I N T E L L I G E N C E
 S W A R M I N T E L L I G E N C E Leen-Kiat Soh November 14, 2017 CSCE 475/875 Multiagent Systems Department of Computer Science and Engineering University of Nebraska Fall 2017 1 Introduction 1 Swarm
S W A R M I N T E L L I G E N C E Leen-Kiat Soh November 14, 2017 CSCE 475/875 Multiagent Systems Department of Computer Science and Engineering University of Nebraska Fall 2017 1 Introduction 1 Swarm
What is Computation? Biological Computation by Melanie Mitchell Computer Science Department, Portland State University and Santa Fe Institute
 Ubiquity Symposium What is Computation? Biological Computation by Melanie Mitchell Computer Science Department, Portland State University and Santa Fe Institute Editor s Introduction In this thirteenth
Ubiquity Symposium What is Computation? Biological Computation by Melanie Mitchell Computer Science Department, Portland State University and Santa Fe Institute Editor s Introduction In this thirteenth
Paradigms, Models and Technologies for Building and Simulating Self-Organising Systems
 Paradigms, Models and Technologies for Building and Simulating Ing. Luca Gardelli DEIS - Department of Electronics, Computer Science & Systems ALMA MATER STUDIORUM Università di Bologna Via Venezia 52,
Paradigms, Models and Technologies for Building and Simulating Ing. Luca Gardelli DEIS - Department of Electronics, Computer Science & Systems ALMA MATER STUDIORUM Università di Bologna Via Venezia 52,
MASON. A Java Multi-agent Simulation Library. Sean Luke Gabriel Catalin Balan Liviu Panait Claudio Cioffi-Revilla Sean Paus
 MASON A Java Multi-agent Simulation Library Sean Luke Gabriel Catalin Balan Liviu Panait Claudio Cioffi-Revilla Sean Paus George Mason University s Center for Social Complexity and Department of Computer
MASON A Java Multi-agent Simulation Library Sean Luke Gabriel Catalin Balan Liviu Panait Claudio Cioffi-Revilla Sean Paus George Mason University s Center for Social Complexity and Department of Computer
Programmable self-assembly in a thousandrobot
 Programmable self-assembly in a thousandrobot swarm Michael Rubenstein, Alejandro Cornejo, Radhika Nagpal. By- Swapna Joshi 1 st year Ph.D Computing Culture and Society. Authors Michael Rubenstein Assistant
Programmable self-assembly in a thousandrobot swarm Michael Rubenstein, Alejandro Cornejo, Radhika Nagpal. By- Swapna Joshi 1 st year Ph.D Computing Culture and Society. Authors Michael Rubenstein Assistant
Aggregation Behaviour as a Source of Collective Decision in a Group of Cockroach-like Robots
 Research Collection Conference Paper Aggregation Behaviour as a Source of Collective Decision in a Group of Cockroach-like Robots Author(s): Garnier, Simon; Jost, Christian; Jeanson, Raphaël; Gautrais,
Research Collection Conference Paper Aggregation Behaviour as a Source of Collective Decision in a Group of Cockroach-like Robots Author(s): Garnier, Simon; Jost, Christian; Jeanson, Raphaël; Gautrais,
Flocking-Based Multi-Robot Exploration
 Flocking-Based Multi-Robot Exploration Noury Bouraqadi and Arnaud Doniec Abstract Dépt. Informatique & Automatique Ecole des Mines de Douai France {bouraqadi,doniec}@ensm-douai.fr Exploration of an unknown
Flocking-Based Multi-Robot Exploration Noury Bouraqadi and Arnaud Doniec Abstract Dépt. Informatique & Automatique Ecole des Mines de Douai France {bouraqadi,doniec}@ensm-douai.fr Exploration of an unknown
Two Foraging Algorithms for Robot Swarms Using Only Local Communication
 Two Foraging Algorithms for Robot Swarms Using Only Local Communication Nicholas R. Hoff III Amelia Sagoff Robert J. Wood and Radhika Nagpal TR-07-10 Computer Science Group Harvard University Cambridge,
Two Foraging Algorithms for Robot Swarms Using Only Local Communication Nicholas R. Hoff III Amelia Sagoff Robert J. Wood and Radhika Nagpal TR-07-10 Computer Science Group Harvard University Cambridge,
CORC 3303 Exploring Robotics. Why Teams?
 Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
AIS and Swarm Intelligence : Immune-inspired Swarm Robotics
 AIS and Swarm Intelligence : Immune-inspired Swarm Robotics Jon Timmis Department of Electronics Department of Computer Science York Center for Complex Systems Analysis jtimmis@cs.york.ac.uk http://www-users.cs.york.ac.uk/jtimmis
AIS and Swarm Intelligence : Immune-inspired Swarm Robotics Jon Timmis Department of Electronics Department of Computer Science York Center for Complex Systems Analysis jtimmis@cs.york.ac.uk http://www-users.cs.york.ac.uk/jtimmis
Principles for the Exploration and Construction of Reactive Swarm Systems
 Principles for the Exploration and Construction of Reactive Swarm Systems Karl Altenburg Department of Accounting, Finance, and Information Systems North Dakota State University Fargo, ND 58102 karl.altenburg@ndsu.edu
Principles for the Exploration and Construction of Reactive Swarm Systems Karl Altenburg Department of Accounting, Finance, and Information Systems North Dakota State University Fargo, ND 58102 karl.altenburg@ndsu.edu
TRAFFIC SIGNAL CONTROL WITH ANT COLONY OPTIMIZATION. A Thesis presented to the Faculty of California Polytechnic State University, San Luis Obispo
 TRAFFIC SIGNAL CONTROL WITH ANT COLONY OPTIMIZATION A Thesis presented to the Faculty of California Polytechnic State University, San Luis Obispo In Partial Fulfillment of the Requirements for the Degree
TRAFFIC SIGNAL CONTROL WITH ANT COLONY OPTIMIZATION A Thesis presented to the Faculty of California Polytechnic State University, San Luis Obispo In Partial Fulfillment of the Requirements for the Degree
ONE of the many fascinating phenomena
 1 Stigmergic navigation on an RFID floor with a multi-robot team Ali Abdul Khaliq, Maurizio Di Rocco, Alessandro Saffiotti, Abstract Stigmergy is a mechanism that allows the coordination between agents
1 Stigmergic navigation on an RFID floor with a multi-robot team Ali Abdul Khaliq, Maurizio Di Rocco, Alessandro Saffiotti, Abstract Stigmergy is a mechanism that allows the coordination between agents
I N T E L L I G E N C E
 S W A R M I N T E L L I G E N C E Leen-Kiat Soh August 23-25, 2016 CSCE990 Seminar: Advanced Multiagent Systems Department of Computer Science and Engineering University of Nebraska Fall 2016 1 Introduction
S W A R M I N T E L L I G E N C E Leen-Kiat Soh August 23-25, 2016 CSCE990 Seminar: Advanced Multiagent Systems Department of Computer Science and Engineering University of Nebraska Fall 2016 1 Introduction
Holland, Jane; Griffith, Josephine; O'Riordan, Colm.
 Provided by the author(s) and NUI Galway in accordance with publisher policies. Please cite the published version when available. Title An evolutionary approach to formation control with mobile robots
Provided by the author(s) and NUI Galway in accordance with publisher policies. Please cite the published version when available. Title An evolutionary approach to formation control with mobile robots
Important Tools and Perspectives for the Future of AI
 Important Tools and Perspectives for the Future of AI The Norwegian University of Science and Technology (NTNU) Trondheim, Norway keithd@idi.ntnu.no April 1, 2011 Outline 1 Artificial Life 2 Cognitive
Important Tools and Perspectives for the Future of AI The Norwegian University of Science and Technology (NTNU) Trondheim, Norway keithd@idi.ntnu.no April 1, 2011 Outline 1 Artificial Life 2 Cognitive
An Introduction To Artificial Life
 Explorations in Artificial Life (special issue of AI Expert), pages 4-8, September, 1995. Miller Freeman. An Introduction To Artificial Life Moshe Sipper Logic Systems Laboratory Swiss Federal Institute
Explorations in Artificial Life (special issue of AI Expert), pages 4-8, September, 1995. Miller Freeman. An Introduction To Artificial Life Moshe Sipper Logic Systems Laboratory Swiss Federal Institute
CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS
 CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS GARY B. PARKER, CONNECTICUT COLLEGE, USA, parker@conncoll.edu IVO I. PARASHKEVOV, CONNECTICUT COLLEGE, USA, iipar@conncoll.edu H. JOSEPH
CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS GARY B. PARKER, CONNECTICUT COLLEGE, USA, parker@conncoll.edu IVO I. PARASHKEVOV, CONNECTICUT COLLEGE, USA, iipar@conncoll.edu H. JOSEPH
Collaborative Foraging using Beacons
 Collaborative Foraging using Beacons Brian Hrolenok, Sean Luke, Keith Sullivan, and Christopher Vo Department of Computer Science, George Mason University MSN 4A5, Fairfax, VA 223, USA {bhroleno, sean,
Collaborative Foraging using Beacons Brian Hrolenok, Sean Luke, Keith Sullivan, and Christopher Vo Department of Computer Science, George Mason University MSN 4A5, Fairfax, VA 223, USA {bhroleno, sean,
Alice in Pheromone Land: An Experimental Setup for the Study of Ant-like Robots
 Alice in Pheromone Land: An Experimental Setup for the Study of Ant-like Robots Simon Garnier a, Fabien Tâche b, Maud Combe a, Anne Grimal a and Guy Theraulaz a a Centre de Recherches sur la Cognition
Alice in Pheromone Land: An Experimental Setup for the Study of Ant-like Robots Simon Garnier a, Fabien Tâche b, Maud Combe a, Anne Grimal a and Guy Theraulaz a a Centre de Recherches sur la Cognition
Multi robot Team Formation for Distributed Area Coverage. Raj Dasgupta Computer Science Department University of Nebraska, Omaha
 Multi robot Team Formation for Distributed Area Coverage Raj Dasgupta Computer Science Department University of Nebraska, Omaha C MANTIC Lab Collaborative Multi AgeNt/Multi robot Technologies for Intelligent
Multi robot Team Formation for Distributed Area Coverage Raj Dasgupta Computer Science Department University of Nebraska, Omaha C MANTIC Lab Collaborative Multi AgeNt/Multi robot Technologies for Intelligent
An Investigation of Predator Response in Robotic Herding of Sheep
 2014 International Conference on Intelligent Agriculture IPCBEE vol.63 (2014 ) (2014 ) IACSIT Press, Singapore DOI: 10.7763/IPCBEE. 2014. V63. 9 An Investigation of Predator Response in Robotic Herding
2014 International Conference on Intelligent Agriculture IPCBEE vol.63 (2014 ) (2014 ) IACSIT Press, Singapore DOI: 10.7763/IPCBEE. 2014. V63. 9 An Investigation of Predator Response in Robotic Herding
CS 599: Distributed Intelligence in Robotics
 CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
CS594, Section 30682:
 CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
Effect of Sensor and Actuator Quality on Robot Swarm Algorithm Performance
 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-30, 2011. San Francisco, CA, USA Effect of Sensor and Actuator Quality on Robot Swarm Algorithm Performance Nicholas
2011 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-30, 2011. San Francisco, CA, USA Effect of Sensor and Actuator Quality on Robot Swarm Algorithm Performance Nicholas
The Behavior Evolving Model and Application of Virtual Robots
 The Behavior Evolving Model and Application of Virtual Robots Suchul Hwang Kyungdal Cho V. Scott Gordon Inha Tech. College Inha Tech College CSUS, Sacramento 253 Yonghyundong Namku 253 Yonghyundong Namku
The Behavior Evolving Model and Application of Virtual Robots Suchul Hwang Kyungdal Cho V. Scott Gordon Inha Tech. College Inha Tech College CSUS, Sacramento 253 Yonghyundong Namku 253 Yonghyundong Namku
Towards an Engineering Science of Robot Foraging
 Towards an Engineering Science of Robot Foraging Alan FT Winfield Abstract Foraging is a benchmark problem in robotics - especially for distributed autonomous robotic systems. The systematic study of robot
Towards an Engineering Science of Robot Foraging Alan FT Winfield Abstract Foraging is a benchmark problem in robotics - especially for distributed autonomous robotic systems. The systematic study of robot
Evolving CAM-Brain to control a mobile robot
 Applied Mathematics and Computation 111 (2000) 147±162 www.elsevier.nl/locate/amc Evolving CAM-Brain to control a mobile robot Sung-Bae Cho *, Geum-Beom Song Department of Computer Science, Yonsei University,
Applied Mathematics and Computation 111 (2000) 147±162 www.elsevier.nl/locate/amc Evolving CAM-Brain to control a mobile robot Sung-Bae Cho *, Geum-Beom Song Department of Computer Science, Yonsei University,
INTRODUCTION. a complex system, that using new information technologies (software & hardware) combined
 combined") COMPUTATIONAL INTELLIGENCE & APPLICATIONS INTRODUCTION What is an INTELLIGENT SYSTEM? a complex system, that using new information technologies (software & hardware) combined with communication technologies,
COMPUTATIONAL INTELLIGENCE & APPLICATIONS INTRODUCTION What is an INTELLIGENT SYSTEM? a complex system, that using new information technologies (software & hardware) combined with communication technologies,
Robotic \Food" Chains: Externalization of State and Program for Minimal-Agent Foraging. Barry Brian Werger and Maja J Mataric. Brandeis University
 Robotic \Food" Chains: Externalization of State and Program for Minimal-Agent Foraging Barry Brian Werger and Maja J Mataric Interaction Laboratory Department of Computer Science Brandeis University Waltham,
Robotic \Food" Chains: Externalization of State and Program for Minimal-Agent Foraging Barry Brian Werger and Maja J Mataric Interaction Laboratory Department of Computer Science Brandeis University Waltham,
Distributed Intelligent Systems W11 Machine-Learning Methods Applied to Distributed Robotic Systems
 Distributed Intelligent Systems W11 Machine-Learning Methods Applied to Distributed Robotic Systems 1 Outline Revisiting expensive optimization problems Additional experimental evidence Noise-resistant
Distributed Intelligent Systems W11 Machine-Learning Methods Applied to Distributed Robotic Systems 1 Outline Revisiting expensive optimization problems Additional experimental evidence Noise-resistant
COMPUTATONAL INTELLIGENCE
 COMPUTATONAL INTELLIGENCE October 2011 November 2011 Siegfried Nijssen partially based on slides by Uzay Kaymak Leiden Institute of Advanced Computer Science e-mail: snijssen@liacs.nl Katholieke Universiteit
COMPUTATONAL INTELLIGENCE October 2011 November 2011 Siegfried Nijssen partially based on slides by Uzay Kaymak Leiden Institute of Advanced Computer Science e-mail: snijssen@liacs.nl Katholieke Universiteit
Distributed Adaptation in Multi-Robot Search using Particle Swarm Optimization
 Distributed Adaptation in Multi-Robot Search using Particle Swarm Optimization Jim Pugh and Alcherio Martinoli Swarm-Intelligent Systems Group École Polytechnique Fédérale de Lausanne 1015 Lausanne, Switzerland
Distributed Adaptation in Multi-Robot Search using Particle Swarm Optimization Jim Pugh and Alcherio Martinoli Swarm-Intelligent Systems Group École Polytechnique Fédérale de Lausanne 1015 Lausanne, Switzerland
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts
 Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Syllabus, Fall 2002 for: Agents, Games & Evolution OPIM 325 (Simulation)
") Syllabus, Fall 2002 for: Agents, Games & Evolution OPIM 325 (Simulation) http://opim-sun.wharton.upenn.edu/ sok/teaching/age/f02/ Steven O. Kimbrough August 1, 2002 1 Brief Description Agents, Games &
Syllabus, Fall 2002 for: Agents, Games & Evolution OPIM 325 (Simulation) http://opim-sun.wharton.upenn.edu/ sok/teaching/age/f02/ Steven O. Kimbrough August 1, 2002 1 Brief Description Agents, Games &