Computer Vision. Howie Choset Introduction to Robotics
|
|
|
- Hannah Fitzgerald
- 5 years ago
- Views:
Transcription
1 Computer Vision Howie Choset Introduction to Robotics





2 What is vision?
3 What is computer vision?


4 Edge Detection

5 Edge Detection

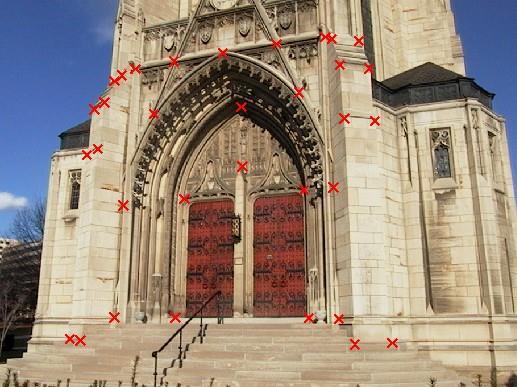
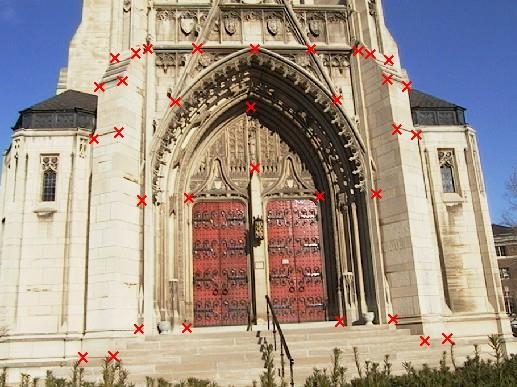
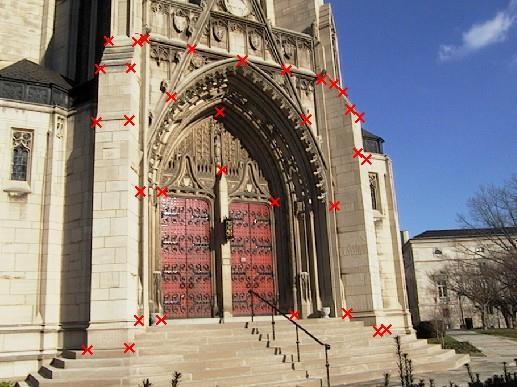
6 Interest points and descriptors (SIFT,..)
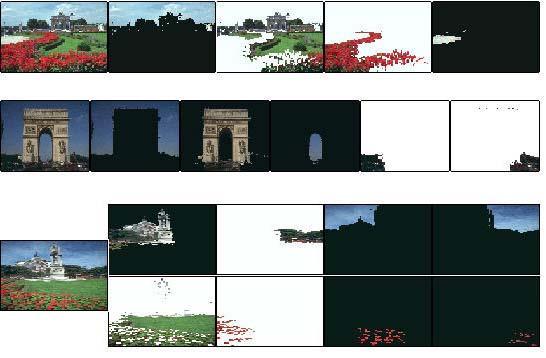
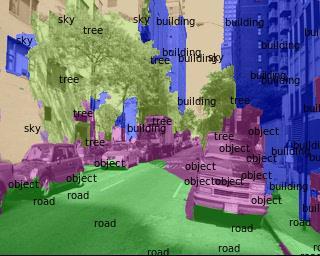
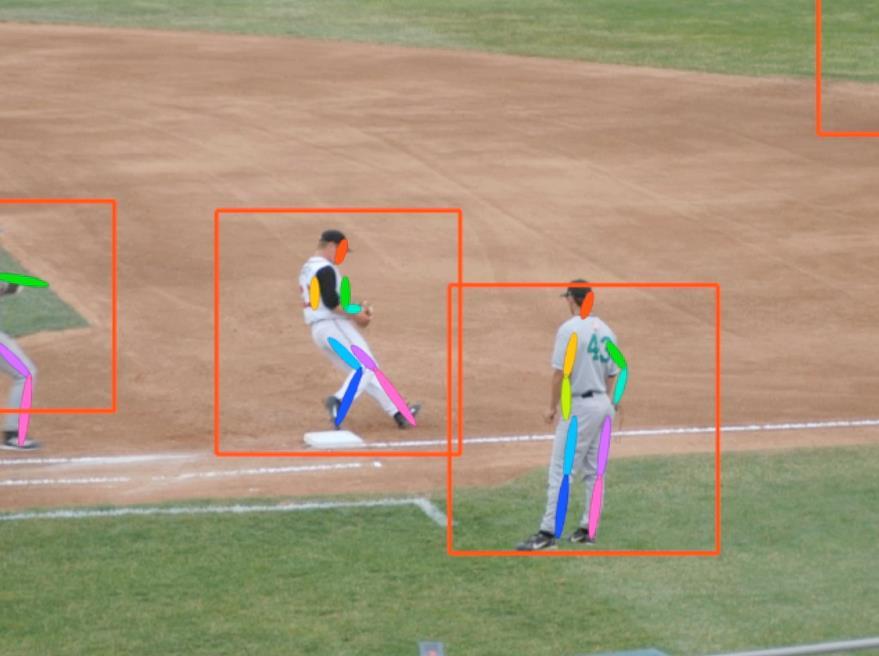
7 Segmentation

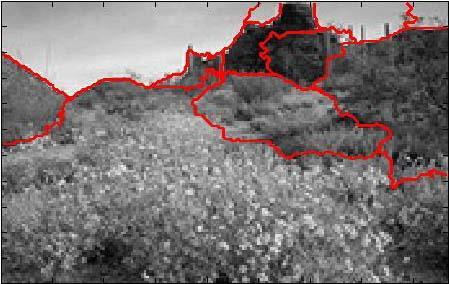
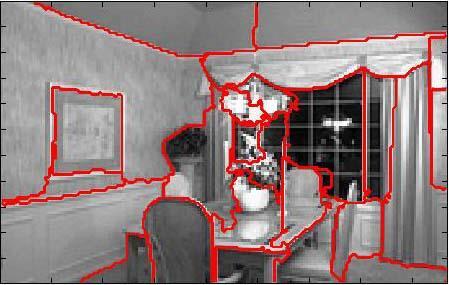
8 Segmentation
9 Recognizing objects and understanding scenes

10
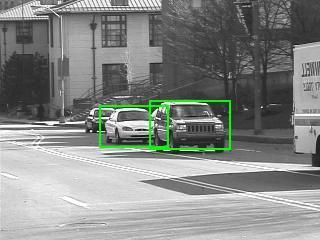

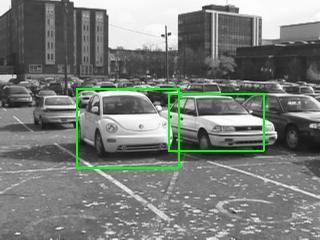

11 Recognition
12 Tracking & Estimating motion
13

14 Motion

15
16 Reconstructing 3D


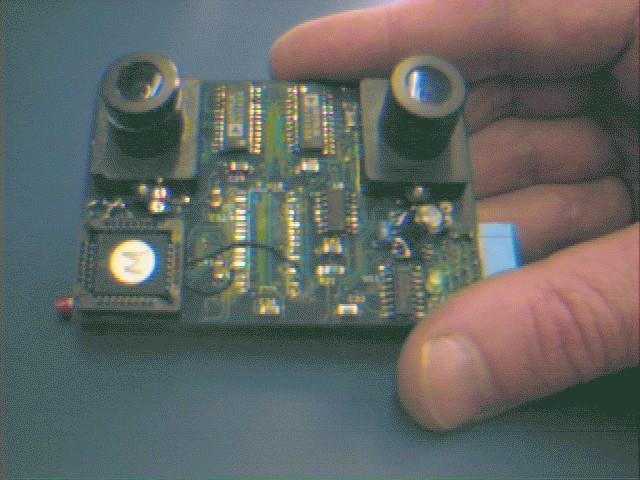
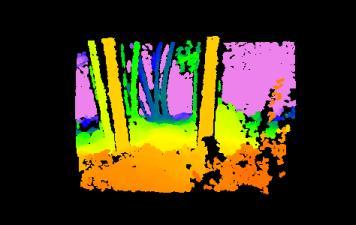
17 Multi-Camera Geometry: Stereo

18 Multi-Camera Geometry: Stereo
19 Multi-Camera Geometry
20 Understanding videos

21
22 Goal of Vision: Recover Projection P: R 3 -> R 2 or P: R 3 -> Z 2 Recover third dimension or just infer stuff
23 Optics Focal length Length f of projection through lens on image plane Inversion Object Projection on image plane is inverted Image plane f
24 Perspective 1 Point Perspective Using similar triangles, it is possible to determine the relative sizes of objects in an image Given a calibrated camera (predetermine a mathematical relationship between size on the image plane and the actual object) Object Image plane f
25 Projection on the image plane Size of an image on the image plane is inversely proportional to the distance from the focal point Image plane h d Focal point f h h d h f By conceptually moving the image plane, we can eliminate the negative sign h d Image plane h f Focal point h d h f
26 Move to three dimensions x x x f y y z z x x f, y z f y z z Image plane (x,y,z) y (x,y,z ) f x
27 Stereo
28 Images Discrete representation of a continuous function Pixel: Picture Element cell of constant color in a digital image An image is a two dimensional array of pixels Pixel: numeric value representing a uniform portion of an image Resolution Number of pixels across in horizontal Number of pixels in the vertical Number of layers used for color Often measured in bits per pixel (bpp) where each color uses 8 bits of data Ex: 640x480x24bpp
29 Images Binary images: Two color image Pixel is only one byte of information Indicates if the intensity of color is above or below some nominal value Thresholding Grayscale All pixels represent the intensity of light in an image, be it red, green, blue, or another color Like holding a piece of transparent colored plastic over your eyes Intensity of light in a pixel is stored as a number, generally inclusive Color Three grayscale images layered on top of eachother with each layer indicating the intensity of a specific color light, generally red, green, and blue (RGB) Third dimension in a digital image

30 Grayscale vs. Binary image Grayscale Binary threshold
31 Thresholding Purpose Trying to find areas of high color intensity Highlights locations of different features of the image (notice Mona s eyes) Image compression, use fewer bits to encode a pixel How done Decide on a value Scan every pixel in the image If it is greater than, make it 255 If it is less than, make it 0 Picking a good Often 128 is a good value to start with Use a histogram to determine values based on color frequency features
32 Histogram Measure the number of pixels of different values in an image. Yields information such as the brightness of an image, important color features, possibilities of color elimination for compression

33 Mona s Histogram 0 255

34 How to Choose a Threshold Probability that a pixel has a gray value z Following Copied from Robot Motion and Control By Spong, Hutchinson, Vidyasagar
35 Probability and Mean (con t) H i z histogram for ith object z = 0 is background The mean for the ith object is μ i = N 1 z=0 z H i (z) N 1 H i z z=0 Conditional mean
36 Variance What is the mean for an image Half pixels 127, half pixels 128 Half pixel 0, half pixels Same mean Different images Average deviation or variance σ 2 = N 1 z=0 z μ 2 P(z) σ i 2 N 1 = z μ i 2 H i z N 1 H i (z) z=0 z=0 Conditional variance
37 Automatic Threshold Selection i = 0,1 Less than z t More than z t Approach: Pick a threshold z t that minimizes the variance of the two resulting groups
38 More threshold selection Two groups, Background below Foreground - above
39 More threshold selection We could pick z t to minimize sum of BAD, because assumes equal number of pixels in back and foreground
40 More threshold selection Two groups, Background below Foreground - above We could pick z t to minimize sum of BAD, because assumes equal number of pixels in back and foreground

41 Copied from Robot Motion and Control By Spong, Hutchinson, Vidyasagar Example



42 Gaussian Masks Used to smooth images and for noise reduction Use before edge detection to avoid spurious edges Johann Carl Friedrich Gauss April 30, 1777 Feb 23, 1855 number theory, statistics, analysis, differential geometry, geodesy, electrostatics, astronomy, and optics. 17 heptadecagon
43 Connectivity Two conventions on considering two pixels next to each other 8 point connectivity All pixels sharing a side or corner are considered adjacent 4 point connectivity Only pixels sharing a side are considered adjacent To eliminate the ambiguity, we could define the shape of a pixel to be a hexagon
8.2 IMAGE PROCESSING VERSUS IMAGE ANALYSIS Image processing: The collection of routines and
 8.1 INTRODUCTION In this chapter, we will study and discuss some fundamental techniques for image processing and image analysis, with a few examples of routines developed for certain purposes. 8.2 IMAGE
8.1 INTRODUCTION In this chapter, we will study and discuss some fundamental techniques for image processing and image analysis, with a few examples of routines developed for certain purposes. 8.2 IMAGE
Digital Image Processing Lec.(3) 4 th class
 4 th class") Digital Image Processing Lec.(3) 4 th class Image Types The image types we will consider are: 1. Binary Images Binary images are the simplest type of images and can take on two values, typically black
Digital Image Processing Lec.(3) 4 th class Image Types The image types we will consider are: 1. Binary Images Binary images are the simplest type of images and can take on two values, typically black
Computing for Engineers in Python
 Computing for Engineers in Python Lecture 10: Signal (Image) Processing Autumn 2011-12 Some slides incorporated from Benny Chor s course 1 Lecture 9: Highlights Sorting, searching and time complexity Preprocessing
Computing for Engineers in Python Lecture 10: Signal (Image) Processing Autumn 2011-12 Some slides incorporated from Benny Chor s course 1 Lecture 9: Highlights Sorting, searching and time complexity Preprocessing
Study guide for Graduate Computer Vision
 Study guide for Graduate Computer Vision Erik G. Learned-Miller Department of Computer Science University of Massachusetts, Amherst Amherst, MA 01003 November 23, 2011 Abstract 1 1. Know Bayes rule. What
Study guide for Graduate Computer Vision Erik G. Learned-Miller Department of Computer Science University of Massachusetts, Amherst Amherst, MA 01003 November 23, 2011 Abstract 1 1. Know Bayes rule. What
Images and Graphics. 4. Images and Graphics - Copyright Denis Hamelin - Ryerson University
 Images and Graphics Images and Graphics Graphics and images are non-textual information that can be displayed and printed. Graphics (vector graphics) are an assemblage of lines, curves or circles with
Images and Graphics Images and Graphics Graphics and images are non-textual information that can be displayed and printed. Graphics (vector graphics) are an assemblage of lines, curves or circles with
Computer Vision Slides curtesy of Professor Gregory Dudek
 Computer Vision Slides curtesy of Professor Gregory Dudek Ioannis Rekleitis Why vision? Passive (emits nothing). Discreet. Energy efficient. Intuitive. Powerful (works well for us, right?) Long and short
Computer Vision Slides curtesy of Professor Gregory Dudek Ioannis Rekleitis Why vision? Passive (emits nothing). Discreet. Energy efficient. Intuitive. Powerful (works well for us, right?) Long and short
Digital Image Processing. Lecture # 3 Image Enhancement
 Digital Image Processing Lecture # 3 Image Enhancement 1 Image Enhancement Image Enhancement 3 Image Enhancement 4 Image Enhancement Process an image so that the result is more suitable than the original
Digital Image Processing Lecture # 3 Image Enhancement 1 Image Enhancement Image Enhancement 3 Image Enhancement 4 Image Enhancement Process an image so that the result is more suitable than the original
An Efficient Color Image Segmentation using Edge Detection and Thresholding Methods
 19 An Efficient Color Image Segmentation using Edge Detection and Thresholding Methods T.Arunachalam* Post Graduate Student, P.G. Dept. of Computer Science, Govt Arts College, Melur - 625 106 Email-Arunac682@gmail.com
19 An Efficient Color Image Segmentation using Edge Detection and Thresholding Methods T.Arunachalam* Post Graduate Student, P.G. Dept. of Computer Science, Govt Arts College, Melur - 625 106 Email-Arunac682@gmail.com
CMVision and Color Segmentation. CSE398/498 Robocup 19 Jan 05
 CMVision and Color Segmentation CSE398/498 Robocup 19 Jan 05 Announcements Please send me your time availability for working in the lab during the M-F, 8AM-8PM time period Why Color Segmentation? Computationally
CMVision and Color Segmentation CSE398/498 Robocup 19 Jan 05 Announcements Please send me your time availability for working in the lab during the M-F, 8AM-8PM time period Why Color Segmentation? Computationally
CS534 Introduction to Computer Vision. Linear Filters. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534 Introduction to Computer Vision Linear Filters Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What are Filters Linear Filters Convolution operation Properties of Linear Filters
CS534 Introduction to Computer Vision Linear Filters Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What are Filters Linear Filters Convolution operation Properties of Linear Filters
Exercise questions for Machine vision
 Exercise questions for Machine vision This is a collection of exercise questions. These questions are all examination alike which means that similar questions may appear at the written exam. I ve divided
Exercise questions for Machine vision This is a collection of exercise questions. These questions are all examination alike which means that similar questions may appear at the written exam. I ve divided
Chapter 17. Shape-Based Operations
 Chapter 17 Shape-Based Operations An shape-based operation identifies or acts on groups of pixels that belong to the same object or image component. We have already seen how components may be identified
Chapter 17 Shape-Based Operations An shape-based operation identifies or acts on groups of pixels that belong to the same object or image component. We have already seen how components may be identified
Image compression with multipixels
 UE22 FEBRUARY 2016 1 Image compression with multipixels Alberto Isaac Barquín Murguía Abstract Digital images, depending on their quality, can take huge amounts of storage space and the number of imaging
UE22 FEBRUARY 2016 1 Image compression with multipixels Alberto Isaac Barquín Murguía Abstract Digital images, depending on their quality, can take huge amounts of storage space and the number of imaging
Image Processing for feature extraction
 Image Processing for feature extraction 1 Outline Rationale for image pre-processing Gray-scale transformations Geometric transformations Local preprocessing Reading: Sonka et al 5.1, 5.2, 5.3 2 Image
Image Processing for feature extraction 1 Outline Rationale for image pre-processing Gray-scale transformations Geometric transformations Local preprocessing Reading: Sonka et al 5.1, 5.2, 5.3 2 Image
Digital Image Processing
 Digital Image Processing Part 2: Image Enhancement Digital Image Processing Course Introduction in the Spatial Domain Lecture AASS Learning Systems Lab, Teknik Room T26 achim.lilienthal@tech.oru.se Course
Digital Image Processing Part 2: Image Enhancement Digital Image Processing Course Introduction in the Spatial Domain Lecture AASS Learning Systems Lab, Teknik Room T26 achim.lilienthal@tech.oru.se Course
Introduction to DSP ECE-S352 Fall Quarter 2000 Matlab Project 1
 Objective: Introduction to DSP ECE-S352 Fall Quarter 2000 Matlab Project 1 This Matlab Project is an extension of the basic correlation theory presented in the course. It shows a practical application
Objective: Introduction to DSP ECE-S352 Fall Quarter 2000 Matlab Project 1 This Matlab Project is an extension of the basic correlation theory presented in the course. It shows a practical application
Digital Image Processing. Lecture # 4 Image Enhancement (Histogram)
") Digital Image Processing Lecture # 4 Image Enhancement (Histogram) 1 Histogram of a Grayscale Image Let I be a 1-band (grayscale) image. I(r,c) is an 8-bit integer between 0 and 255. Histogram, h I, of
Digital Image Processing Lecture # 4 Image Enhancement (Histogram) 1 Histogram of a Grayscale Image Let I be a 1-band (grayscale) image. I(r,c) is an 8-bit integer between 0 and 255. Histogram, h I, of
Image Formation. World Optics Sensor Signal. Computer Vision. Introduction to. Light (Energy) Source. Surface Imaging Plane. Pinhole Lens.
 Source. Surface Imaging Plane. Pinhole Lens.") Image Formation Light (Energy) Source Surface Imaging Plane Pinhole Lens World Optics Sensor Signal B&W Film Color Film TV Camera Silver Density Silver density in three color layers Electrical Today Optics:
Image Formation Light (Energy) Source Surface Imaging Plane Pinhole Lens World Optics Sensor Signal B&W Film Color Film TV Camera Silver Density Silver density in three color layers Electrical Today Optics:
ME 6406 MACHINE VISION. Georgia Institute of Technology
 ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
Vision Review: Image Processing. Course web page:
 Vision Review: Image Processing Course web page: www.cis.udel.edu/~cer/arv September 7, Announcements Homework and paper presentation guidelines are up on web page Readings for next Tuesday: Chapters 6,.,
Vision Review: Image Processing Course web page: www.cis.udel.edu/~cer/arv September 7, Announcements Homework and paper presentation guidelines are up on web page Readings for next Tuesday: Chapters 6,.,
SECTION I - CHAPTER 2 DIGITAL IMAGING PROCESSING CONCEPTS
 RADT 3463 - COMPUTERIZED IMAGING Section I: Chapter 2 RADT 3463 Computerized Imaging 1 SECTION I - CHAPTER 2 DIGITAL IMAGING PROCESSING CONCEPTS RADT 3463 COMPUTERIZED IMAGING Section I: Chapter 2 RADT
RADT 3463 - COMPUTERIZED IMAGING Section I: Chapter 2 RADT 3463 Computerized Imaging 1 SECTION I - CHAPTER 2 DIGITAL IMAGING PROCESSING CONCEPTS RADT 3463 COMPUTERIZED IMAGING Section I: Chapter 2 RADT
A Structured Light Range Imaging System Using a Moving Correlation Code
 A Structured Light Range Imaging System Using a Moving Correlation Code Frank Pipitone Navy Center for Applied Research in Artificial Intelligence Naval Research Laboratory Washington, DC 20375-5337 USA
A Structured Light Range Imaging System Using a Moving Correlation Code Frank Pipitone Navy Center for Applied Research in Artificial Intelligence Naval Research Laboratory Washington, DC 20375-5337 USA
COMPARATIVE PERFORMANCE ANALYSIS OF HAND GESTURE RECOGNITION TECHNIQUES
 International Journal of Advanced Research in Engineering and Technology (IJARET) Volume 9, Issue 3, May - June 2018, pp. 177 185, Article ID: IJARET_09_03_023 Available online at http://www.iaeme.com/ijaret/issues.asp?jtype=ijaret&vtype=9&itype=3
International Journal of Advanced Research in Engineering and Technology (IJARET) Volume 9, Issue 3, May - June 2018, pp. 177 185, Article ID: IJARET_09_03_023 Available online at http://www.iaeme.com/ijaret/issues.asp?jtype=ijaret&vtype=9&itype=3
Prof. Feng Liu. Fall /04/2018
 Prof. Feng Liu Fall 2018 http://www.cs.pdx.edu/~fliu/courses/cs447/ 10/04/2018 1 Last Time Image file formats Color quantization 2 Today Dithering Signal Processing Homework 1 due today in class Homework
Prof. Feng Liu Fall 2018 http://www.cs.pdx.edu/~fliu/courses/cs447/ 10/04/2018 1 Last Time Image file formats Color quantization 2 Today Dithering Signal Processing Homework 1 due today in class Homework
IMAGE PROCESSING: POINT PROCESSES
 IMAGE PROCESSING: POINT PROCESSES N. C. State University CSC557 Multimedia Computing and Networking Fall 2001 Lecture # 11 IMAGE PROCESSING: POINT PROCESSES N. C. State University CSC557 Multimedia Computing
IMAGE PROCESSING: POINT PROCESSES N. C. State University CSC557 Multimedia Computing and Networking Fall 2001 Lecture # 11 IMAGE PROCESSING: POINT PROCESSES N. C. State University CSC557 Multimedia Computing
Lane Detection in Automotive
 Lane Detection in Automotive Contents Introduction... 2 Image Processing... 2 Reading an image... 3 RGB to Gray... 3 Mean and Gaussian filtering... 5 Defining our Region of Interest... 6 BirdsEyeView Transformation...
Lane Detection in Automotive Contents Introduction... 2 Image Processing... 2 Reading an image... 3 RGB to Gray... 3 Mean and Gaussian filtering... 5 Defining our Region of Interest... 6 BirdsEyeView Transformation...
IMAGE FORMATION. Light source properties. Sensor characteristics Surface. Surface reflectance properties. Optics
 IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
ROBOT VISION. Dr.M.Madhavi, MED, MVSREC
 ROBOT VISION Dr.M.Madhavi, MED, MVSREC Robotic vision may be defined as the process of acquiring and extracting information from images of 3-D world. Robotic vision is primarily targeted at manipulation
ROBOT VISION Dr.M.Madhavi, MED, MVSREC Robotic vision may be defined as the process of acquiring and extracting information from images of 3-D world. Robotic vision is primarily targeted at manipulation
Assistant Lecturer Sama S. Samaan
 MP3 Not only does MPEG define how video is compressed, but it also defines a standard for compressing audio. This standard can be used to compress the audio portion of a movie (in which case the MPEG standard
MP3 Not only does MPEG define how video is compressed, but it also defines a standard for compressing audio. This standard can be used to compress the audio portion of a movie (in which case the MPEG standard
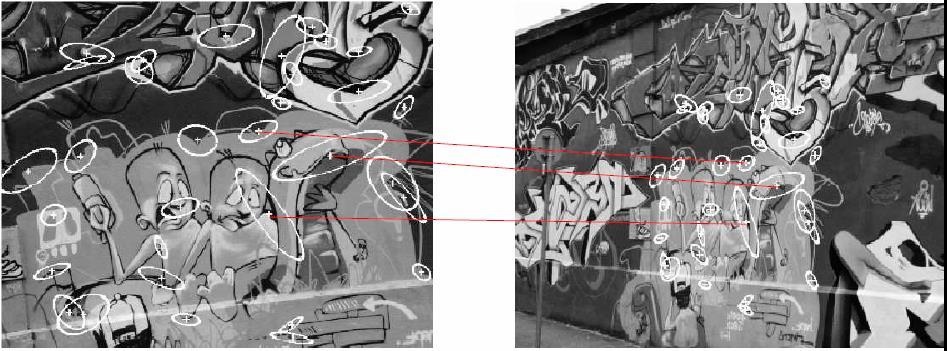
Improved SIFT Matching for Image Pairs with a Scale Difference
 Improved SIFT Matching for Image Pairs with a Scale Difference Y. Bastanlar, A. Temizel and Y. Yardımcı Informatics Institute, Middle East Technical University, Ankara, 06531, Turkey Published in IET Electronics,
Improved SIFT Matching for Image Pairs with a Scale Difference Y. Bastanlar, A. Temizel and Y. Yardımcı Informatics Institute, Middle East Technical University, Ankara, 06531, Turkey Published in IET Electronics,
Overview. Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image
 Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE
 APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE Najirah Umar 1 1 Jurusan Teknik Informatika, STMIK Handayani Makassar Email : najirah_stmikh@yahoo.com
APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE Najirah Umar 1 1 Jurusan Teknik Informatika, STMIK Handayani Makassar Email : najirah_stmikh@yahoo.com
CS 445 HW#2 Solutions
 1. Text problem 3.1 CS 445 HW#2 Solutions (a) General form: problem figure,. For the condition shown in the Solving for K yields Then, (b) General form: the problem figure, as in (a) so For the condition
1. Text problem 3.1 CS 445 HW#2 Solutions (a) General form: problem figure,. For the condition shown in the Solving for K yields Then, (b) General form: the problem figure, as in (a) so For the condition
Image processing for gesture recognition: from theory to practice. Michela Goffredo University Roma TRE
 Image processing for gesture recognition: from theory to practice 2 Michela Goffredo University Roma TRE goffredo@uniroma3.it Image processing At this point we have all of the basics at our disposal. We
Image processing for gesture recognition: from theory to practice 2 Michela Goffredo University Roma TRE goffredo@uniroma3.it Image processing At this point we have all of the basics at our disposal. We
Image Filtering in Spatial domain. Computer Vision Jia-Bin Huang, Virginia Tech
 Image Filtering in Spatial domain Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Lecture schedule changes Office hours - Jia-Bin (44 Whittemore Hall) Friday at : AM 2: PM Office hours
Image Filtering in Spatial domain Computer Vision Jia-Bin Huang, Virginia Tech Administrative stuffs Lecture schedule changes Office hours - Jia-Bin (44 Whittemore Hall) Friday at : AM 2: PM Office hours
DIGITAL IMAGE PROCESSING
 DIGITAL IMAGE PROCESSING Lecture 1 Introduction Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion University of the Negev 2 Introduction to Digital Image Processing Lecturer: Dr. Tammy
DIGITAL IMAGE PROCESSING Lecture 1 Introduction Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion University of the Negev 2 Introduction to Digital Image Processing Lecturer: Dr. Tammy
DECISION NUMBER FOURTEEN TO THE TREATY ON OPEN SKIES
 DECISION NUMBER FOURTEEN TO THE TREATY ON OPEN SKIES OSCC.DEC 14 12 October 1994 METHODOLOGY FOR CALCULATING THE MINIMUM HEIGHT ABOVE GROUND LEVEL AT WHICH EACH VIDEO CAMERA WITH REAL TIME DISPLAY INSTALLED
DECISION NUMBER FOURTEEN TO THE TREATY ON OPEN SKIES OSCC.DEC 14 12 October 1994 METHODOLOGY FOR CALCULATING THE MINIMUM HEIGHT ABOVE GROUND LEVEL AT WHICH EACH VIDEO CAMERA WITH REAL TIME DISPLAY INSTALLED
IMAGE PROCESSING PAPER PRESENTATION ON IMAGE PROCESSING
 IMAGE PROCESSING PAPER PRESENTATION ON IMAGE PROCESSING PRESENTED BY S PRADEEP K SUNIL KUMAR III BTECH-II SEM, III BTECH-II SEM, C.S.E. C.S.E. pradeep585singana@gmail.com sunilkumar5b9@gmail.com CONTACT:
IMAGE PROCESSING PAPER PRESENTATION ON IMAGE PROCESSING PRESENTED BY S PRADEEP K SUNIL KUMAR III BTECH-II SEM, III BTECH-II SEM, C.S.E. C.S.E. pradeep585singana@gmail.com sunilkumar5b9@gmail.com CONTACT:
EC-433 Digital Image Processing
 EC-433 Digital Image Processing Lecture 2 Digital Image Fundamentals Dr. Arslan Shaukat 1 Fundamental Steps in DIP Image Acquisition An image is captured by a sensor (such as a monochrome or color TV camera)
EC-433 Digital Image Processing Lecture 2 Digital Image Fundamentals Dr. Arslan Shaukat 1 Fundamental Steps in DIP Image Acquisition An image is captured by a sensor (such as a monochrome or color TV camera)
The ultimate camera. Computational Photography. Creating the ultimate camera. The ultimate camera. What does it do?
 Computational Photography The ultimate camera What does it do? Image from Durand & Freeman s MIT Course on Computational Photography Today s reading Szeliski Chapter 9 The ultimate camera Infinite resolution
Computational Photography The ultimate camera What does it do? Image from Durand & Freeman s MIT Course on Computational Photography Today s reading Szeliski Chapter 9 The ultimate camera Infinite resolution
Image Filtering. Median Filtering
 Image Filtering Image filtering is used to: Remove noise Sharpen contrast Highlight contours Detect edges Other uses? Image filters can be classified as linear or nonlinear. Linear filters are also know
Image Filtering Image filtering is used to: Remove noise Sharpen contrast Highlight contours Detect edges Other uses? Image filters can be classified as linear or nonlinear. Linear filters are also know
CoE4TN4 Image Processing. Chapter 3: Intensity Transformation and Spatial Filtering
 CoE4TN4 Image Processing Chapter 3: Intensity Transformation and Spatial Filtering Image Enhancement Enhancement techniques: to process an image so that the result is more suitable than the original image
CoE4TN4 Image Processing Chapter 3: Intensity Transformation and Spatial Filtering Image Enhancement Enhancement techniques: to process an image so that the result is more suitable than the original image
Fundamentals of Multimedia
 Fundamentals of Multimedia Lecture 2 Graphics & Image Data Representation Mahmoud El-Gayyar elgayyar@ci.suez.edu.eg Outline Black & white imags 1 bit images 8-bit gray-level images Image histogram Dithering
Fundamentals of Multimedia Lecture 2 Graphics & Image Data Representation Mahmoud El-Gayyar elgayyar@ci.suez.edu.eg Outline Black & white imags 1 bit images 8-bit gray-level images Image histogram Dithering
On spatial resolution
 On spatial resolution Introduction How is spatial resolution defined? There are two main approaches in defining local spatial resolution. One method follows distinction criteria of pointlike objects (i.e.
On spatial resolution Introduction How is spatial resolution defined? There are two main approaches in defining local spatial resolution. One method follows distinction criteria of pointlike objects (i.e.
Digital Image Processing 3/e
 Laboratory Projects for Digital Image Processing 3/e by Gonzalez and Woods 2008 Prentice Hall Upper Saddle River, NJ 07458 USA www.imageprocessingplace.com The following sample laboratory projects are
Laboratory Projects for Digital Image Processing 3/e by Gonzalez and Woods 2008 Prentice Hall Upper Saddle River, NJ 07458 USA www.imageprocessingplace.com The following sample laboratory projects are
Chapter 9 Image Compression Standards
 Chapter 9 Image Compression Standards 9.1 The JPEG Standard 9.2 The JPEG2000 Standard 9.3 The JPEG-LS Standard 1IT342 Image Compression Standards The image standard specifies the codec, which defines how
Chapter 9 Image Compression Standards 9.1 The JPEG Standard 9.2 The JPEG2000 Standard 9.3 The JPEG-LS Standard 1IT342 Image Compression Standards The image standard specifies the codec, which defines how
Sensors and Sensing Cameras and Camera Calibration
 Sensors and Sensing Cameras and Camera Calibration Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 20.11.2014
Sensors and Sensing Cameras and Camera Calibration Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 20.11.2014
What is an image? Images and Displays. Representative display technologies. An image is:
 What is an image? Images and Displays A photographic print A photographic negative? This projection screen Some numbers in RAM? CS465 Lecture 2 2005 Steve Marschner 1 2005 Steve Marschner 2 An image is:
What is an image? Images and Displays A photographic print A photographic negative? This projection screen Some numbers in RAM? CS465 Lecture 2 2005 Steve Marschner 1 2005 Steve Marschner 2 An image is:
Design of Temporally Dithered Codes for Increased Depth of Field in Structured Light Systems
 Design of Temporally Dithered Codes for Increased Depth of Field in Structured Light Systems Ricardo R. Garcia University of California, Berkeley Berkeley, CA rrgarcia@eecs.berkeley.edu Abstract In recent
Design of Temporally Dithered Codes for Increased Depth of Field in Structured Light Systems Ricardo R. Garcia University of California, Berkeley Berkeley, CA rrgarcia@eecs.berkeley.edu Abstract In recent
Chapter 8. Representing Multimedia Digitally
 Chapter 8 Representing Multimedia Digitally Learning Objectives Explain how RGB color is represented in bytes Explain the difference between bits and binary numbers Change an RGB color by binary addition
Chapter 8 Representing Multimedia Digitally Learning Objectives Explain how RGB color is represented in bytes Explain the difference between bits and binary numbers Change an RGB color by binary addition
PLazeR. a planar laser rangefinder. Robert Ying (ry2242) Derek Xingzhou He (xh2187) Peiqian Li (pl2521) Minh Trang Nguyen (mnn2108)
 Derek Xingzhou He (xh2187) Peiqian Li (pl2521) Minh Trang Nguyen (mnn2108)") PLazeR a planar laser rangefinder Robert Ying (ry2242) Derek Xingzhou He (xh2187) Peiqian Li (pl2521) Minh Trang Nguyen (mnn2108) Overview & Motivation Detecting the distance between a sensor and objects
PLazeR a planar laser rangefinder Robert Ying (ry2242) Derek Xingzhou He (xh2187) Peiqian Li (pl2521) Minh Trang Nguyen (mnn2108) Overview & Motivation Detecting the distance between a sensor and objects
Chapter 12 Image Processing
 Chapter 12 Image Processing The distance sensor on your self-driving car detects an object 100 m in front of your car. Are you following the car in front of you at a safe distance or has a pedestrian jumped
Chapter 12 Image Processing The distance sensor on your self-driving car detects an object 100 m in front of your car. Are you following the car in front of you at a safe distance or has a pedestrian jumped
DESIGN OF A LASER DISTANCE SENSOR WITH A WEB CAMERA FOR A MOBILE ROBOT
 CZECH TECHNICAL UNIVERSITY IN PRAGUE FACULTY OF MECHANICAL ENGINEERING DEPT. OF INSTRUMENTATION AND CONTROL ENGINEERING DESIGN OF A LASER DISTANCE SENSOR WITH A WEB CAMERA FOR A MOBILE ROBOT ASHYKHMIN
CZECH TECHNICAL UNIVERSITY IN PRAGUE FACULTY OF MECHANICAL ENGINEERING DEPT. OF INSTRUMENTATION AND CONTROL ENGINEERING DESIGN OF A LASER DISTANCE SENSOR WITH A WEB CAMERA FOR A MOBILE ROBOT ASHYKHMIN
SYLLABUS CHAPTER - 2 : INTENSITY TRANSFORMATIONS. Some Basic Intensity Transformation Functions, Histogram Processing.
 Contents i SYLLABUS UNIT - I CHAPTER - 1 : INTRODUCTION TO DIGITAL IMAGE PROCESSING Introduction, Origins of Digital Image Processing, Applications of Digital Image Processing, Fundamental Steps, Components,
Contents i SYLLABUS UNIT - I CHAPTER - 1 : INTRODUCTION TO DIGITAL IMAGE PROCESSING Introduction, Origins of Digital Image Processing, Applications of Digital Image Processing, Fundamental Steps, Components,
Digitizing Color. Place Value in a Decimal Number. Place Value in a Binary Number. Chapter 11: Light, Sound, Magic: Representing Multimedia Digitally
 Chapter 11: Light, Sound, Magic: Representing Multimedia Digitally Fluency with Information Technology Third Edition by Lawrence Snyder Digitizing Color RGB Colors: Binary Representation Giving the intensities
Chapter 11: Light, Sound, Magic: Representing Multimedia Digitally Fluency with Information Technology Third Edition by Lawrence Snyder Digitizing Color RGB Colors: Binary Representation Giving the intensities
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2015 NAME: SOLUTIONS Problem Score Max Score 1 8 2 8 3 9 4 4 5 3 6 4 7 6 8 13 9 7 10 4 11 7 12 10 13 9 14 8 Total 100 1 1. [8] What are
Midterm Examination CS 534: Computational Photography November 3, 2015 NAME: SOLUTIONS Problem Score Max Score 1 8 2 8 3 9 4 4 5 3 6 4 7 6 8 13 9 7 10 4 11 7 12 10 13 9 14 8 Total 100 1 1. [8] What are
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 7 Part-2 (Exam #1 Review) February 26, 2014 Sam Siewert Outline of Week 7 Basic Convolution Transform Speed-Up Concepts for Computer Vision Hough Linear Transform
Computer and Machine Vision Lecture Week 7 Part-2 (Exam #1 Review) February 26, 2014 Sam Siewert Outline of Week 7 Basic Convolution Transform Speed-Up Concepts for Computer Vision Hough Linear Transform
PSEUDO HDR VIDEO USING INVERSE TONE MAPPING
 PSEUDO HDR VIDEO USING INVERSE TONE MAPPING Yu-Chen Lin ( 林育辰 ), Chiou-Shann Fuh ( 傅楸善 ) Dept. of Computer Science and Information Engineering, National Taiwan University, Taiwan E-mail: r03922091@ntu.edu.tw
PSEUDO HDR VIDEO USING INVERSE TONE MAPPING Yu-Chen Lin ( 林育辰 ), Chiou-Shann Fuh ( 傅楸善 ) Dept. of Computer Science and Information Engineering, National Taiwan University, Taiwan E-mail: r03922091@ntu.edu.tw
Solution for Image & Video Processing
 Solution for Image & Video Processing December-2015 Index Q.1) a). 2-3 b). 4 (N.A.) c). 4 (N.A.) d). 4 (N.A.) e). 4-5 Q.2) a). 5 to 7 b). 7 (N.A.) Q.3) a). 8-9 b). 9 to 12 Q.4) a). 12-13 b). 13 to 16 Q.5)
Solution for Image & Video Processing December-2015 Index Q.1) a). 2-3 b). 4 (N.A.) c). 4 (N.A.) d). 4 (N.A.) e). 4-5 Q.2) a). 5 to 7 b). 7 (N.A.) Q.3) a). 8-9 b). 9 to 12 Q.4) a). 12-13 b). 13 to 16 Q.5)
Image analysis. CS/CME/BIOPHYS/BMI 279 Fall 2015 Ron Dror
 Image analysis CS/CME/BIOPHYS/BMI 279 Fall 2015 Ron Dror A two- dimensional image can be described as a function of two variables f(x,y). For a grayscale image, the value of f(x,y) specifies the brightness
Image analysis CS/CME/BIOPHYS/BMI 279 Fall 2015 Ron Dror A two- dimensional image can be described as a function of two variables f(x,y). For a grayscale image, the value of f(x,y) specifies the brightness
CSC 320 H1S CSC320 Exam Study Guide (Last updated: April 2, 2015) Winter 2015
 Winter 2015") Question 1. Suppose you have an image I that contains an image of a left eye (the image is detailed enough that it makes a difference that it s the left eye). Write pseudocode to find other left eyes in
Question 1. Suppose you have an image I that contains an image of a left eye (the image is detailed enough that it makes a difference that it s the left eye). Write pseudocode to find other left eyes in
Linear Gaussian Method to Detect Blurry Digital Images using SIFT
 IJCAES ISSN: 2231-4946 Volume III, Special Issue, November 2013 International Journal of Computer Applications in Engineering Sciences Special Issue on Emerging Research Areas in Computing(ERAC) www.caesjournals.org
IJCAES ISSN: 2231-4946 Volume III, Special Issue, November 2013 International Journal of Computer Applications in Engineering Sciences Special Issue on Emerging Research Areas in Computing(ERAC) www.caesjournals.org
CS 376b Computer Vision
 CS 376b Computer Vision 09 / 03 / 2014 Instructor: Michael Eckmann Today s Topics This is technically a lab/discussion session, but I'll treat it as a lecture today. Introduction to the course layout,
CS 376b Computer Vision 09 / 03 / 2014 Instructor: Michael Eckmann Today s Topics This is technically a lab/discussion session, but I'll treat it as a lecture today. Introduction to the course layout,
5/17/2009. Digitizing Color. Place Value in a Binary Number. Place Value in a Decimal Number. Place Value in a Binary Number
 Chapter 11: Light, Sound, Magic: Representing Multimedia Digitally Digitizing Color Fluency with Information Technology Third Edition by Lawrence Snyder RGB Colors: Binary Representation Giving the intensities
Chapter 11: Light, Sound, Magic: Representing Multimedia Digitally Digitizing Color Fluency with Information Technology Third Edition by Lawrence Snyder RGB Colors: Binary Representation Giving the intensities
Preparing Remote Sensing Data for Natural Resources Mapping (image enhancement, rectifications )
") Preparing Remote Sensing Data for Natural Resources Mapping (image enhancement, rectifications ) Why is this important What are the major approaches Examples of digital image enhancement Follow up exercises
Preparing Remote Sensing Data for Natural Resources Mapping (image enhancement, rectifications ) Why is this important What are the major approaches Examples of digital image enhancement Follow up exercises
CATEGORY SKILL SET REF. TASK ITEM
 ECDL / ICDL Image Editing This module sets out essential concepts and skills relating to the ability to understand the main concepts underlying digital images and to use an image editing application to
ECDL / ICDL Image Editing This module sets out essential concepts and skills relating to the ability to understand the main concepts underlying digital images and to use an image editing application to
Image Processing for Mechatronics Engineering For senior undergraduate students Academic Year 2017/2018, Winter Semester
 Image Processing for Mechatronics Engineering For senior undergraduate students Academic Year 2017/2018, Winter Semester Lecture 2: Elementary Image Operations 16.09.2017 Dr. Mohammed Abdel-Megeed Salem
Image Processing for Mechatronics Engineering For senior undergraduate students Academic Year 2017/2018, Winter Semester Lecture 2: Elementary Image Operations 16.09.2017 Dr. Mohammed Abdel-Megeed Salem
Modeling and Synthesis of Aperture Effects in Cameras
 Modeling and Synthesis of Aperture Effects in Cameras Douglas Lanman, Ramesh Raskar, and Gabriel Taubin Computational Aesthetics 2008 20 June, 2008 1 Outline Introduction and Related Work Modeling Vignetting
Modeling and Synthesis of Aperture Effects in Cameras Douglas Lanman, Ramesh Raskar, and Gabriel Taubin Computational Aesthetics 2008 20 June, 2008 1 Outline Introduction and Related Work Modeling Vignetting
Images and Displays. Lecture Steve Marschner 1
 Images and Displays Lecture 2 2008 Steve Marschner 1 Introduction Computer graphics: The study of creating, manipulating, and using visual images in the computer. What is an image? A photographic print?
Images and Displays Lecture 2 2008 Steve Marschner 1 Introduction Computer graphics: The study of creating, manipulating, and using visual images in the computer. What is an image? A photographic print?
Physics 2310 Lab #5: Thin Lenses and Concave Mirrors Dr. Michael Pierce (Univ. of Wyoming)
") Physics 2310 Lab #5: Thin Lenses and Concave Mirrors Dr. Michael Pierce (Univ. of Wyoming) Purpose: The purpose of this lab is to introduce students to some of the properties of thin lenses and mirrors.
Physics 2310 Lab #5: Thin Lenses and Concave Mirrors Dr. Michael Pierce (Univ. of Wyoming) Purpose: The purpose of this lab is to introduce students to some of the properties of thin lenses and mirrors.
Lane Detection in Automotive
 Lane Detection in Automotive Contents Introduction... 2 Image Processing... 2 Reading an image... 3 RGB to Gray... 3 Mean and Gaussian filtering... 6 Defining our Region of Interest... 10 BirdsEyeView
Lane Detection in Automotive Contents Introduction... 2 Image Processing... 2 Reading an image... 3 RGB to Gray... 3 Mean and Gaussian filtering... 6 Defining our Region of Interest... 10 BirdsEyeView
Image Enhancement in Spatial Domain
 Image Enhancement in Spatial Domain 2 Image enhancement is a process, rather a preprocessing step, through which an original image is made suitable for a specific application. The application scenarios
Image Enhancement in Spatial Domain 2 Image enhancement is a process, rather a preprocessing step, through which an original image is made suitable for a specific application. The application scenarios
Sampling and Reconstruction. Today: Color Theory. Color Theory COMP575
 and COMP575 Today: Finish up Color Color Theory CIE XYZ color space 3 color matching functions: X, Y, Z Y is luminance X and Z are color values WP user acdx Color Theory xyy color space Since Y is luminance,
and COMP575 Today: Finish up Color Color Theory CIE XYZ color space 3 color matching functions: X, Y, Z Y is luminance X and Z are color values WP user acdx Color Theory xyy color space Since Y is luminance,
Digital Image Processing Introduction
 Digital Processing Introduction Dr. Hatem Elaydi Electrical Engineering Department Islamic University of Gaza Fall 2015 Sep. 7, 2015 Digital Processing manipulation data might experience none-ideal acquisition,
Digital Processing Introduction Dr. Hatem Elaydi Electrical Engineering Department Islamic University of Gaza Fall 2015 Sep. 7, 2015 Digital Processing manipulation data might experience none-ideal acquisition,
Computer Vision, Lecture 3
 Computer Vision, Lecture 3 Professor Hager http://www.cs.jhu.edu/~hager /4/200 CS 46, Copyright G.D. Hager Outline for Today Image noise Filtering by Convolution Properties of Convolution /4/200 CS 46,
Computer Vision, Lecture 3 Professor Hager http://www.cs.jhu.edu/~hager /4/200 CS 46, Copyright G.D. Hager Outline for Today Image noise Filtering by Convolution Properties of Convolution /4/200 CS 46,
Histogram equalization
 Histogram equalization Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Histogram The histogram of an L-valued
Histogram equalization Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione delle immagini (Image processing I) academic year 2011 2012 Histogram The histogram of an L-valued
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Gonzales & Woods, Emmanuel Agu Suleyman Tosun
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Gonzales & Woods, Emmanuel Agu Suleyman Tosun Histograms Histograms Histograms Histograms Histograms Interpreting histograms Histograms Image
BSB663 Image Processing Pinar Duygulu Slides are adapted from Gonzales & Woods, Emmanuel Agu Suleyman Tosun Histograms Histograms Histograms Histograms Histograms Interpreting histograms Histograms Image
APPLICATIONS FOR TELECENTRIC LIGHTING
 APPLICATIONS FOR TELECENTRIC LIGHTING Telecentric lenses used in combination with telecentric lighting provide the most accurate results for measurement of object shapes and geometries. They make attributes
APPLICATIONS FOR TELECENTRIC LIGHTING Telecentric lenses used in combination with telecentric lighting provide the most accurate results for measurement of object shapes and geometries. They make attributes
Checkerboard Tracker for Camera Calibration. Andrew DeKelaita EE368
 Checkerboard Tracker for Camera Calibration Abstract Andrew DeKelaita EE368 The checkerboard extraction process is an important pre-preprocessing step in camera calibration. This project attempts to implement
Checkerboard Tracker for Camera Calibration Abstract Andrew DeKelaita EE368 The checkerboard extraction process is an important pre-preprocessing step in camera calibration. This project attempts to implement
Color Image Processing
 Color Image Processing Jesus J. Caban Outline Discuss Assignment #1 Project Proposal Color Perception & Analysis 1 Discuss Assignment #1 Project Proposal Due next Monday, Oct 4th Project proposal Submit
Color Image Processing Jesus J. Caban Outline Discuss Assignment #1 Project Proposal Color Perception & Analysis 1 Discuss Assignment #1 Project Proposal Due next Monday, Oct 4th Project proposal Submit
CS101 Lecture 19: Digital Images. John Magee 18 July 2013 Some material copyright Jones and Bartlett. Overview/Questions
 CS101 Lecture 19: Digital Images John Magee 18 July 2013 Some material copyright Jones and Bartlett 1 Overview/Questions What is digital information? What is color? How do pictures get encoded into binary
CS101 Lecture 19: Digital Images John Magee 18 July 2013 Some material copyright Jones and Bartlett 1 Overview/Questions What is digital information? What is color? How do pictures get encoded into binary
Color. Used heavily in human vision. Color is a pixel property, making some recognition problems easy
 Color Used heavily in human vision Color is a pixel property, making some recognition problems easy Visible spectrum for humans is 400 nm (blue) to 700 nm (red) Machines can see much more; ex. X-rays,
Color Used heavily in human vision Color is a pixel property, making some recognition problems easy Visible spectrum for humans is 400 nm (blue) to 700 nm (red) Machines can see much more; ex. X-rays,
Image analysis. CS/CME/BioE/Biophys/BMI 279 Oct. 31 and Nov. 2, 2017 Ron Dror
 Image analysis CS/CME/BioE/Biophys/BMI 279 Oct. 31 and Nov. 2, 2017 Ron Dror 1 Outline Images in molecular and cellular biology Reducing image noise Mean and Gaussian filters Frequency domain interpretation
Image analysis CS/CME/BioE/Biophys/BMI 279 Oct. 31 and Nov. 2, 2017 Ron Dror 1 Outline Images in molecular and cellular biology Reducing image noise Mean and Gaussian filters Frequency domain interpretation
A Primer on Human Vision: Insights and Inspiration for Computer Vision
 A Primer on Human Vision: Insights and Inspiration for Computer Vision Guest&Lecture:&Marius&Cătălin&Iordan&& CS&131&8&Computer&Vision:&Foundations&and&Applications& 27&October&2014 detection recognition
A Primer on Human Vision: Insights and Inspiration for Computer Vision Guest&Lecture:&Marius&Cătălin&Iordan&& CS&131&8&Computer&Vision:&Foundations&and&Applications& 27&October&2014 detection recognition
Robot Visual Mapper. Hung Dang, Jasdeep Hundal and Ramu Nachiappan. Fig. 1: A typical image of Rovio s environment
 Robot Visual Mapper Hung Dang, Jasdeep Hundal and Ramu Nachiappan Abstract Mapping is an essential component of autonomous robot path planning and navigation. The standard approach often employs laser
Robot Visual Mapper Hung Dang, Jasdeep Hundal and Ramu Nachiappan Abstract Mapping is an essential component of autonomous robot path planning and navigation. The standard approach often employs laser
Preprocessing and Segregating Offline Gujarati Handwritten Datasheet for Character Recognition
 Preprocessing and Segregating Offline Gujarati Handwritten Datasheet for Character Recognition Hetal R. Thaker Atmiya Institute of Technology & science, Kalawad Road, Rajkot Gujarat, India C. K. Kumbharana,
Preprocessing and Segregating Offline Gujarati Handwritten Datasheet for Character Recognition Hetal R. Thaker Atmiya Institute of Technology & science, Kalawad Road, Rajkot Gujarat, India C. K. Kumbharana,
Image Processing Lecture 4
 Image Enhancement Image enhancement aims to process an image so that the output image is more suitable than the original. It is used to solve some computer imaging problems, or to improve image quality.
Image Enhancement Image enhancement aims to process an image so that the output image is more suitable than the original. It is used to solve some computer imaging problems, or to improve image quality.
Be aware that there is no universal notation for the various quantities.
 Fourier Optics v2.4 Ray tracing is limited in its ability to describe optics because it ignores the wave properties of light. Diffraction is needed to explain image spatial resolution and contrast and
Fourier Optics v2.4 Ray tracing is limited in its ability to describe optics because it ignores the wave properties of light. Diffraction is needed to explain image spatial resolution and contrast and
INSTITUTIONEN FÖR SYSTEMTEKNIK LULEÅ TEKNISKA UNIVERSITET
 INSTITUTIONEN FÖR SYSTEMTEKNIK LULEÅ TEKNISKA UNIVERSITET Some color images on this slide Last Lecture 2D filtering frequency domain The magnitude of the 2D DFT gives the amplitudes of the sinusoids and
INSTITUTIONEN FÖR SYSTEMTEKNIK LULEÅ TEKNISKA UNIVERSITET Some color images on this slide Last Lecture 2D filtering frequency domain The magnitude of the 2D DFT gives the amplitudes of the sinusoids and
Image acquisition. Midterm Review. Digitization, line of image. Digitization, whole image. Geometric transformations. Interpolation 10/26/2016
 Image acquisition Midterm Review Image Processing CSE 166 Lecture 10 2 Digitization, line of image Digitization, whole image 3 4 Geometric transformations Interpolation CSE 166 Transpose these matrices
Image acquisition Midterm Review Image Processing CSE 166 Lecture 10 2 Digitization, line of image Digitization, whole image 3 4 Geometric transformations Interpolation CSE 166 Transpose these matrices
Image Capture and Problems
 Image Capture and Problems A reasonable capture IVR Vision: Flat Part Recognition Fisher lecture 4 slide 1 Image Capture: Focus problems Focus set to one distance. Nearby distances in focus (depth of focus).
Image Capture and Problems A reasonable capture IVR Vision: Flat Part Recognition Fisher lecture 4 slide 1 Image Capture: Focus problems Focus set to one distance. Nearby distances in focus (depth of focus).
NEW HIERARCHICAL NOISE REDUCTION 1
 NEW HIERARCHICAL NOISE REDUCTION 1 Hou-Yo Shen ( 沈顥祐 ), 1 Chou-Shann Fuh ( 傅楸善 ) 1 Graduate Institute of Computer Science and Information Engineering, National Taiwan University E-mail: kalababygi@gmail.com
NEW HIERARCHICAL NOISE REDUCTION 1 Hou-Yo Shen ( 沈顥祐 ), 1 Chou-Shann Fuh ( 傅楸善 ) 1 Graduate Institute of Computer Science and Information Engineering, National Taiwan University E-mail: kalababygi@gmail.com
from: Point Operations (Single Operands)
") from: http://www.khoral.com/contrib/contrib/dip2001 Point Operations (Single Operands) Histogram Equalization Histogram equalization is as a contrast enhancement technique with the objective to obtain
from: http://www.khoral.com/contrib/contrib/dip2001 Point Operations (Single Operands) Histogram Equalization Histogram equalization is as a contrast enhancement technique with the objective to obtain
Digital Image Fundamentals and Image Enhancement in the Spatial Domain
 Digital Image Fundamentals and Image Enhancement in the Spatial Domain Mohamed N. Ahmed, Ph.D. Introduction An image may be defined as 2D function f(x,y), where x and y are spatial coordinates. The amplitude
Digital Image Fundamentals and Image Enhancement in the Spatial Domain Mohamed N. Ahmed, Ph.D. Introduction An image may be defined as 2D function f(x,y), where x and y are spatial coordinates. The amplitude
Achim J. Lilienthal Mobile Robotics and Olfaction Lab, AASS, Örebro University
 Achim J. Lilienthal Mobile Robotics and Olfaction Lab, Room T29, Mo, -2 o'clock AASS, Örebro University (please drop me an email in advance) achim.lilienthal@oru.se 4.!!!!!!!!! Pre-Class Reading!!!!!!!!!
Achim J. Lilienthal Mobile Robotics and Olfaction Lab, Room T29, Mo, -2 o'clock AASS, Örebro University (please drop me an email in advance) achim.lilienthal@oru.se 4.!!!!!!!!! Pre-Class Reading!!!!!!!!!
Removing Temporal Stationary Blur in Route Panoramas
 Removing Temporal Stationary Blur in Route Panoramas Jiang Yu Zheng and Min Shi Indiana University Purdue University Indianapolis jzheng@cs.iupui.edu Abstract The Route Panorama is a continuous, compact
Removing Temporal Stationary Blur in Route Panoramas Jiang Yu Zheng and Min Shi Indiana University Purdue University Indianapolis jzheng@cs.iupui.edu Abstract The Route Panorama is a continuous, compact
Applications of Flash and No-Flash Image Pairs in Mobile Phone Photography
 Applications of Flash and No-Flash Image Pairs in Mobile Phone Photography Xi Luo Stanford University 450 Serra Mall, Stanford, CA 94305 xluo2@stanford.edu Abstract The project explores various application
Applications of Flash and No-Flash Image Pairs in Mobile Phone Photography Xi Luo Stanford University 450 Serra Mall, Stanford, CA 94305 xluo2@stanford.edu Abstract The project explores various application
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 7 - Class 2: Segmentation 2 October 12th, 2017 Today Segmentation, continued: - Superpixels Graph-cut methods Mid-term: - Practice questions Administrations
CSE 527: Introduction to Computer Vision Week 7 - Class 2: Segmentation 2 October 12th, 2017 Today Segmentation, continued: - Superpixels Graph-cut methods Mid-term: - Practice questions Administrations
Goal: Label Skin Pixels in an Image. Their Application. Background/Previous Work. Understanding Skin Albedo. Measuring Spectral Albedo of Skin
 Goal: Label Skin Pixels in an Image Statistical Color Models with Application to Skin Detection M. J. Jones and J. M. Rehg Int. J. of Computer Vision, 46(1):81-96, Jan 2002 Applications: Person finding/tracking
Goal: Label Skin Pixels in an Image Statistical Color Models with Application to Skin Detection M. J. Jones and J. M. Rehg Int. J. of Computer Vision, 46(1):81-96, Jan 2002 Applications: Person finding/tracking
A Fast Algorithm of Extracting Rail Profile Base on the Structured Light
 A Fast Algorithm of Extracting Rail Profile Base on the Structured Light Abstract Li Li-ing Chai Xiao-Dong Zheng Shu-Bin College of Urban Railway Transportation Shanghai University of Engineering Science
A Fast Algorithm of Extracting Rail Profile Base on the Structured Light Abstract Li Li-ing Chai Xiao-Dong Zheng Shu-Bin College of Urban Railway Transportation Shanghai University of Engineering Science