Collision Detection and Teamcenter Haptics: CATCH. May 14-30: Logan Scott, Matt Mayer, James Erickson, Paul Uhing, and Tony Alleven
|
|
|
- Georgia Hart
- 5 years ago
- Views:
Transcription
1 Collision Detection and Teamcenter Haptics: CATCH May 14-30: Logan Scott, Matt Mayer, James Erickson, Paul Uhing, and Tony Alleven

2 What is a haptic device? Haptics Delivering haptics in other ways Force feedback
3 Problem Statement Manipulate 3D models in a preexisting model viewer with a haptic input device. Collision detection + haptic feedback Proof of concept design
4 Our Solution A C++ library Load 3D models into an existing physics engine Poll simulation state from the physics engine Convert transformation representations Update part transformations in the visualizer
5 Demo emo.mp4
6 METaL
7 Dependencies Term Description Developed by CATCH Our project - what we ve built Us Teamcenter Visualization (TCVis) Visualization software Siemens VisController API for interaction with Teamcenter Siemens JT A data format for 3D models Siemens JT Open Toolkit API for interaction with JT files Siemens Virtuose Haptic arm Haption IPSI Physics engine Haption

8 Where does CATCH fit in?
9 Use Cases Internal experimentation o o Siemens VRAC

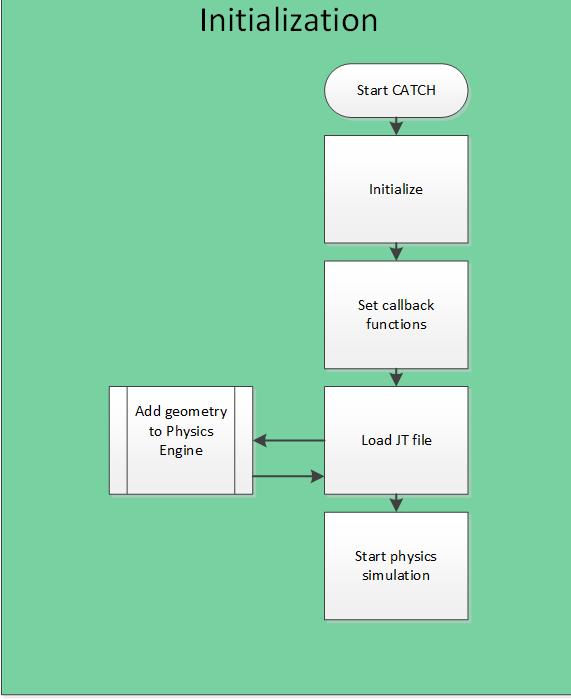
10 Final Design
11 Core CATCH Modules
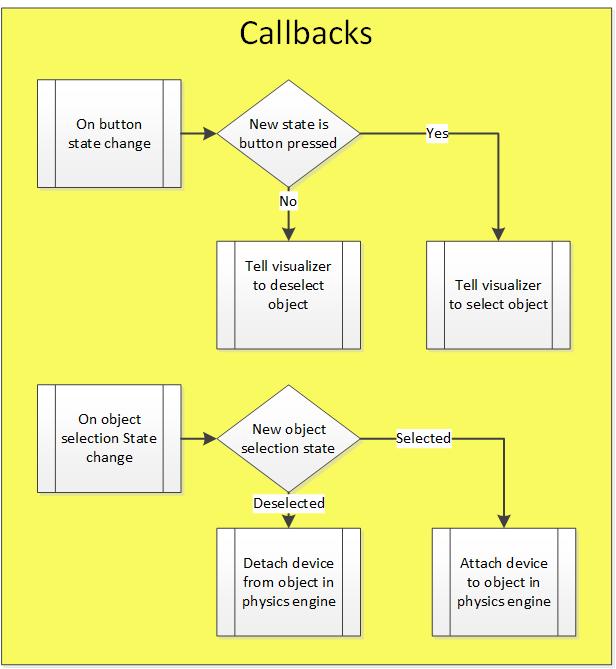
12 Facade Module User-facing Inter-module callbacks exist here
13 Functional Decomposition

14 Main Loop Module Govern execution speed Transport cursor / part transformations

15 Functional Decomposition
16 Functional Decomposition

17 JT Open Toolkit Module Generate 3D part data Triangle meshes Transformations IDs
18 Transformation Representations Representing a transformation as a double[16] OpenJTTK and VisController (File Importer and Visualizer API) IPSI (Physics Engine) representation 3x3 Rotation X,Y,Z Translation
19 IPSI (Physics) Module Update and sync with physics engine 3D parts Haptic device
20 Visualization Module Update and sync visualizer Communicate through VisController API
21 Development Process Heavy design work at the beginning o Paid off at the end Iterative process Weekly tests Space mouse Strived for usable demos
22 Results CATCH allows physical feedback in a virtual environment Some limitations o IPSI isn t designed for tightly-packed assemblies. o Licensing issues (10 or more help tickets) Able to affect changes in VisController
23 Special Thanks Dr. Tsung-Pin Yeh Dr. Judy Vance Dr. David Weiss Haption
24 Questions?
25 <This slide left blank>
26 Functional Requirements Functional requirements 1. Manipulate a cursor in Teamcenter Visualization with a haptic device 2. Select an object in Teamcenter Visualization with the haptic device
27 Functional Requirements Functional requirements(cont.) 3. Object must have appropriate haptic feedback upon a collision with another object 4. Support loading part geometry via Jupiter Tessellation (JT) files
28 Non Functional Requirements Non-functional Requirements 1. I/O Lag-time <200 ms 2. After accounting for lag time, all object models shall be synchronized. 3. Document to an extent that others can use the library
29 Use Enviroment Proof of concept o o o o Windows 7(x64) only Simple 3D assemblies Virtuose haptic device METaL
30 Smartsheet Link =6fad3999ac af29cc2b90f239
31 Technical Challenges Knowledge Acquisition IPSI VisController Virtuose Availability
32 Technical Challenges Physics Engine Representation Visual Representation Differences in Base Frame o Relative vs. Absolute Memory Representation Solution: Physics Engine Visualization: Consistency in Transformation Process
33 Technical Challenges Data Ownership and Lifecycle First major C++ application Memory management Access from concurrent threads o Heap-heavy allocation: guarantees memory remains in scope
34 High-Level Overview Goal: Create prototype application that uses a haptic controller arm (Virtuose) to manipulate parts within a 3D scene o o Rendered in TeamCenter Visualization Physics and haptic feedback performed by IPSI Proof of Concept: Commercial Software can be used in a haptic application.
35 Scope Integrating the haptic arm, the physics engine, and displaying the virtual scene This is proof of concept We are not making a plug and play haptic device/cad viewer integration application
36 Testing Prototyping o o Verification: Space Mouse and Virtuose Simulator Validation: Two-week sprints + client demo METaL Lab o o Virtuose: In France for repairs Upon return, test with physical hardware
37

38 METal layout
39 Functional Decomposition
Collision Detection and Teamcenter Haptics: CATCH
 Collision Detection and Teamcenter Haptics: CATCH Team: May 14-30 Advisor: Dr. Weiss Members: Tony Alleven, Logan Scott, Matt Mayer, James Erickson, and Paul Uhing Client: Siemens, Dr. Vance 1 Problem
Collision Detection and Teamcenter Haptics: CATCH Team: May 14-30 Advisor: Dr. Weiss Members: Tony Alleven, Logan Scott, Matt Mayer, James Erickson, and Paul Uhing Client: Siemens, Dr. Vance 1 Problem
Collision Detection and Teamcenter Haptics: CATCH. Final Report
 Collision Detection and Teamcenter Haptics: CATCH Final Report May 14-30 Logan Scott Matt Mayer James Erickson Anthony Alleven Paul Uhing May 14 30, Collision Detection and Teamcenter Haptics: CATCH 1
Collision Detection and Teamcenter Haptics: CATCH Final Report May 14-30 Logan Scott Matt Mayer James Erickson Anthony Alleven Paul Uhing May 14 30, Collision Detection and Teamcenter Haptics: CATCH 1
P15083: Virtual Visualization for Anatomy Teaching, Training and Surgery Simulation Applications. Gate Review
 P15083: Virtual Visualization for Anatomy Teaching, Training and Surgery Simulation Applications Gate Review Agenda review of starting objectives customer requirements, engineering requirements 50% goal,
P15083: Virtual Visualization for Anatomy Teaching, Training and Surgery Simulation Applications Gate Review Agenda review of starting objectives customer requirements, engineering requirements 50% goal,
VIRTUAL TOUCH. Product Software IPP: INTERACTIVE PHYSICS PACK
 IPP: INTERACTIVE PHYSICS PACK IPP is an add-on for Virtools Dev, dedicated to interactive physics. IPP is based on IPSI (Interactive Physics Simulation Interface), which incorporates algorithms of CEA
IPP: INTERACTIVE PHYSICS PACK IPP is an add-on for Virtools Dev, dedicated to interactive physics. IPP is based on IPSI (Interactive Physics Simulation Interface), which incorporates algorithms of CEA
Advanced Tools for Graphical Authoring of Dynamic Virtual Environments at the NADS
 Advanced Tools for Graphical Authoring of Dynamic Virtual Environments at the NADS Matt Schikore Yiannis E. Papelis Ginger Watson National Advanced Driving Simulator & Simulation Center The University
Advanced Tools for Graphical Authoring of Dynamic Virtual Environments at the NADS Matt Schikore Yiannis E. Papelis Ginger Watson National Advanced Driving Simulator & Simulation Center The University
Virtual Environments. Ruth Aylett
 Virtual Environments Ruth Aylett Aims of the course 1. To demonstrate a critical understanding of modern VE systems, evaluating the strengths and weaknesses of the current VR technologies 2. To be able
Virtual Environments Ruth Aylett Aims of the course 1. To demonstrate a critical understanding of modern VE systems, evaluating the strengths and weaknesses of the current VR technologies 2. To be able
Immersive Visualization and Collaboration with LS-PrePost-VR and LS-PrePost-Remote
 8 th International LS-DYNA Users Conference Visualization Immersive Visualization and Collaboration with LS-PrePost-VR and LS-PrePost-Remote Todd J. Furlong Principal Engineer - Graphics and Visualization
8 th International LS-DYNA Users Conference Visualization Immersive Visualization and Collaboration with LS-PrePost-VR and LS-PrePost-Remote Todd J. Furlong Principal Engineer - Graphics and Visualization
Building a bimanual gesture based 3D user interface for Blender
 Modeling by Hand Building a bimanual gesture based 3D user interface for Blender Tatu Harviainen Helsinki University of Technology Telecommunications Software and Multimedia Laboratory Content 1. Background
Modeling by Hand Building a bimanual gesture based 3D user interface for Blender Tatu Harviainen Helsinki University of Technology Telecommunications Software and Multimedia Laboratory Content 1. Background
The 8 th International Scientific Conference elearning and software for Education Bucharest, April 26-27, / X
 The 8 th International Scientific Conference elearning and software for Education Bucharest, April 26-27, 2012 10.5682/2066-026X-12-153 SOLUTIONS FOR DEVELOPING SCORM CONFORMANT SERIOUS GAMES Dragoş BĂRBIERU
The 8 th International Scientific Conference elearning and software for Education Bucharest, April 26-27, 2012 10.5682/2066-026X-12-153 SOLUTIONS FOR DEVELOPING SCORM CONFORMANT SERIOUS GAMES Dragoş BĂRBIERU
CSTA K- 12 Computer Science Standards: Mapped to STEM, Common Core, and Partnership for the 21 st Century Standards
 CSTA K- 12 Computer Science s: Mapped to STEM, Common Core, and Partnership for the 21 st Century s STEM Cluster Topics Common Core State s CT.L2-01 CT: Computational Use the basic steps in algorithmic
CSTA K- 12 Computer Science s: Mapped to STEM, Common Core, and Partnership for the 21 st Century s STEM Cluster Topics Common Core State s CT.L2-01 CT: Computational Use the basic steps in algorithmic
Virtual components in assemblies
 Virtual components in assemblies Publication Number spse01690 Virtual components in assemblies Publication Number spse01690 Proprietary and restricted rights notice This software and related documentation
Virtual components in assemblies Publication Number spse01690 Virtual components in assemblies Publication Number spse01690 Proprietary and restricted rights notice This software and related documentation
Using VR and simulation to enable agile processes for safety-critical environments
 Using VR and simulation to enable agile processes for safety-critical environments Michael N. Louka Department Head, VR & AR IFE Digital Systems Virtual Reality Virtual Reality: A computer system used
Using VR and simulation to enable agile processes for safety-critical environments Michael N. Louka Department Head, VR & AR IFE Digital Systems Virtual Reality Virtual Reality: A computer system used
CS 354R: Computer Game Technology
 CS 354R: Computer Game Technology http://www.cs.utexas.edu/~theshark/courses/cs354r/ Fall 2017 Instructor and TAs Instructor: Sarah Abraham theshark@cs.utexas.edu GDC 5.420 Office Hours: MW4:00-6:00pm
CS 354R: Computer Game Technology http://www.cs.utexas.edu/~theshark/courses/cs354r/ Fall 2017 Instructor and TAs Instructor: Sarah Abraham theshark@cs.utexas.edu GDC 5.420 Office Hours: MW4:00-6:00pm
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing
 A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
UNIT-III LIFE-CYCLE PHASES
 INTRODUCTION: UNIT-III LIFE-CYCLE PHASES - If there is a well defined separation between research and development activities and production activities then the software is said to be in successful development
INTRODUCTION: UNIT-III LIFE-CYCLE PHASES - If there is a well defined separation between research and development activities and production activities then the software is said to be in successful development
CMI CATIA TEAMCENTER INTEGRATION. CATIA V4/ V5 Teamcenter Enterprise Integration
 CMI CATIA TEAMCENTER INTEGRATION CATIA V4/ V5 Teamcenter Enterprise Integration 1 T-SYSTEMS TEAMCENTER CATIA INTEGRATION CATIA TEAMCENTER INTEGRATION OVERVIEW Product since 1995 Teamcenter as global PDM
CMI CATIA TEAMCENTER INTEGRATION CATIA V4/ V5 Teamcenter Enterprise Integration 1 T-SYSTEMS TEAMCENTER CATIA INTEGRATION CATIA TEAMCENTER INTEGRATION OVERVIEW Product since 1995 Teamcenter as global PDM
Computer Graphics Si Lu Fall /25/2017
 Computer Graphics Si Lu Fall 2017 09/25/2017 Today Course overview and information Digital images Homework 1 due Oct. 4 in class No late homework will be accepted 2 Pre-Requisites C/C++ programming Linear
Computer Graphics Si Lu Fall 2017 09/25/2017 Today Course overview and information Digital images Homework 1 due Oct. 4 in class No late homework will be accepted 2 Pre-Requisites C/C++ programming Linear
Design Issues in Virtual Reality
 Dr. Judy M. Vance Associate Professor Mechanical Engineering Iowa State University Ames, Iowa Task Develop a VR application to amplify the human ability to understand or evaluate "some concept" What does
Dr. Judy M. Vance Associate Professor Mechanical Engineering Iowa State University Ames, Iowa Task Develop a VR application to amplify the human ability to understand or evaluate "some concept" What does
Haptic Rendering of Large-Scale VEs
 Haptic Rendering of Large-Scale VEs Dr. Mashhuda Glencross and Prof. Roger Hubbold Manchester University (UK) EPSRC Grant: GR/S23087/0 Perceiving the Sense of Touch Important considerations: Burdea: Haptic
Haptic Rendering of Large-Scale VEs Dr. Mashhuda Glencross and Prof. Roger Hubbold Manchester University (UK) EPSRC Grant: GR/S23087/0 Perceiving the Sense of Touch Important considerations: Burdea: Haptic
INTERACTIVE DEFORMATION THROUGH MESH-FREE STRESS ANALYSIS IN VIRTUAL REALITY
 INTERACTIVE DEFORMATION THROUGH MESH-FREE STRESS ANALYSIS IN VIRTUAL REALITY International Design Engineering Conference, 2008 Daniela Faas Department of Mechanical Engineering Virtual Reality Applications
INTERACTIVE DEFORMATION THROUGH MESH-FREE STRESS ANALYSIS IN VIRTUAL REALITY International Design Engineering Conference, 2008 Daniela Faas Department of Mechanical Engineering Virtual Reality Applications
PASSENGER. Story of a convergent pipeline. Thomas Felix TG - Passenger Ubisoft Montréal. Pierre Blaizeau TWINE Ubisoft Montréal
 PASSENGER Story of a convergent pipeline Thomas Felix TG - Passenger Ubisoft Montréal Pierre Blaizeau TWINE Ubisoft Montréal Technology Group PASSENGER How to expand your game universe? How to bridge game
PASSENGER Story of a convergent pipeline Thomas Felix TG - Passenger Ubisoft Montréal Pierre Blaizeau TWINE Ubisoft Montréal Technology Group PASSENGER How to expand your game universe? How to bridge game
HUMAN COMPUTER INTERFACE
 HUMAN COMPUTER INTERFACE TARUNIM SHARMA Department of Computer Science Maharaja Surajmal Institute C-4, Janakpuri, New Delhi, India ABSTRACT-- The intention of this paper is to provide an overview on the
HUMAN COMPUTER INTERFACE TARUNIM SHARMA Department of Computer Science Maharaja Surajmal Institute C-4, Janakpuri, New Delhi, India ABSTRACT-- The intention of this paper is to provide an overview on the
Using Web-Based Computer Graphics to Teach Surgery
 Using Web-Based Computer Graphics to Teach Surgery Ken Brodlie Nuha El-Khalili Ying Li School of Computer Studies University of Leeds Position Paper for GVE99, Coimbra, Portugal Surgical Training Surgical
Using Web-Based Computer Graphics to Teach Surgery Ken Brodlie Nuha El-Khalili Ying Li School of Computer Studies University of Leeds Position Paper for GVE99, Coimbra, Portugal Surgical Training Surgical
MANPADS VIRTUAL REALITY SIMULATOR
 MANPADS VIRTUAL REALITY SIMULATOR SQN LDR Faisal Rashid Pakistan Air Force Adviser: DrAmela Sadagic 2 nd Reader: Erik Johnson 1 AGENDA Problem Space Problem Statement Background Research Questions Approach
MANPADS VIRTUAL REALITY SIMULATOR SQN LDR Faisal Rashid Pakistan Air Force Adviser: DrAmela Sadagic 2 nd Reader: Erik Johnson 1 AGENDA Problem Space Problem Statement Background Research Questions Approach
Development of A Collaborative Virtual Environment for Finite Element Simulation
 Development of A Collaborative Virtual Environment for Finite Element Simulation M. Kasim Abdul-Jalil Advisor : Dr. Christina L. Bloebaum Co-advisor : Dr. Abani Patra Committee : Dr. T. Keshavadas Department
Development of A Collaborative Virtual Environment for Finite Element Simulation M. Kasim Abdul-Jalil Advisor : Dr. Christina L. Bloebaum Co-advisor : Dr. Abani Patra Committee : Dr. T. Keshavadas Department
CSE 165: 3D User Interaction. Lecture #11: Travel
 CSE 165: 3D User Interaction Lecture #11: Travel 2 Announcements Homework 3 is on-line, due next Friday Media Teaching Lab has Merge VR viewers to borrow for cell phone based VR http://acms.ucsd.edu/students/medialab/equipment
CSE 165: 3D User Interaction Lecture #11: Travel 2 Announcements Homework 3 is on-line, due next Friday Media Teaching Lab has Merge VR viewers to borrow for cell phone based VR http://acms.ucsd.edu/students/medialab/equipment
CS277 - Experimental Haptics Lecture 2. Haptic Rendering
 CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
FORCE FEEDBACK. Roope Raisamo
 FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
Taco Comfort Solutions
 Industrial machinery and heavy equipment Product Simcenter Heating and cooling equipment manufacturer uses STAR-CCM+ to save time and costs by rapidly simulating multiple pump designs Business challenges
Industrial machinery and heavy equipment Product Simcenter Heating and cooling equipment manufacturer uses STAR-CCM+ to save time and costs by rapidly simulating multiple pump designs Business challenges
CATS METRIX 3D - SOW. 00a First version Magnus Karlsson. 00b Updated to only include basic functionality Magnus Karlsson
 CATS METRIX 3D - SOW Revision Number Date Changed Details of change By 00a 2015-11-11 First version Magnus Karlsson 00b 2015-12-04 Updated to only include basic functionality Magnus Karlsson Approved -
CATS METRIX 3D - SOW Revision Number Date Changed Details of change By 00a 2015-11-11 First version Magnus Karlsson 00b 2015-12-04 Updated to only include basic functionality Magnus Karlsson Approved -
Course Summary. CLASSROOM: On-site Instructor-led Education WEBINAR: Instructor-led On-line Training ON-DEMAND: Virtual Self-Paced Learning
 Course Summary CLASSROOM: On-site Instructor-led Education WEBINAR: Instructor-led On-line Training ON-DEMAND: Virtual Self-Paced Learning NO. COURSE NAME CLASSROOM* WEBINAR ON-DEMAND MBD/MBE EDUCATION
Course Summary CLASSROOM: On-site Instructor-led Education WEBINAR: Instructor-led On-line Training ON-DEMAND: Virtual Self-Paced Learning NO. COURSE NAME CLASSROOM* WEBINAR ON-DEMAND MBD/MBE EDUCATION
The value of VR for professionals. Sébastien Cb MiddleVR.com
 The value of VR for professionals Sébastien Cb Kuntz CEO @SebKuntz @MiddleVR MiddleVR.com Virtual reality for professionals Team of VR experts Founded in 2012 VR Content creation professional services
The value of VR for professionals Sébastien Cb Kuntz CEO @SebKuntz @MiddleVR MiddleVR.com Virtual reality for professionals Team of VR experts Founded in 2012 VR Content creation professional services
Dr Antony Robotham - Executive Director EWG-DSS Liverpool April 2012
 Dr Antony Robotham - Executive Director EWG-DSS Liverpool 2012 12-13 April 2012 THE VALUE OF SIMULATION AND IMMERSIVE VIRTUAL REALITY ENVIRONMENTS TO DESIGN DECISION MAKING IN NEW PRODUCT DEVELOPMENT DR
Dr Antony Robotham - Executive Director EWG-DSS Liverpool 2012 12-13 April 2012 THE VALUE OF SIMULATION AND IMMERSIVE VIRTUAL REALITY ENVIRONMENTS TO DESIGN DECISION MAKING IN NEW PRODUCT DEVELOPMENT DR
Approaches to the Successful Design and Implementation of VR Applications
 Approaches to the Successful Design and Implementation of VR Applications Steve Bryson Computer Science Corporation/NASA Ames Research Center Moffett Field, Ca. 1 Introduction Virtual reality is the use
Approaches to the Successful Design and Implementation of VR Applications Steve Bryson Computer Science Corporation/NASA Ames Research Center Moffett Field, Ca. 1 Introduction Virtual reality is the use
AP1506. Description. Pin Assignments. Features. Applications. 150kHz, 3A PWM BUCK DC/DC CONVERTER AP SD 4 FB 3 GND 2 Output
 150kHz, 3A PWM BUCK DC/DC CONVERTER Description The series are monolithic IC designed for a step-down DC/DC converter, and own the ability of driving a 3A load without external transistor. Due to reducing
150kHz, 3A PWM BUCK DC/DC CONVERTER Description The series are monolithic IC designed for a step-down DC/DC converter, and own the ability of driving a 3A load without external transistor. Due to reducing
Integrating PhysX and OpenHaptics: Efficient Force Feedback Generation Using Physics Engine and Haptic Devices
 This is the Pre-Published Version. Integrating PhysX and Opens: Efficient Force Feedback Generation Using Physics Engine and Devices 1 Leon Sze-Ho Chan 1, Kup-Sze Choi 1 School of Nursing, Hong Kong Polytechnic
This is the Pre-Published Version. Integrating PhysX and Opens: Efficient Force Feedback Generation Using Physics Engine and Devices 1 Leon Sze-Ho Chan 1, Kup-Sze Choi 1 School of Nursing, Hong Kong Polytechnic
The CHAI Libraries. F. Conti, F. Barbagli, R. Balaniuk, M. Halg, C. Lu, D. Morris L. Sentis, E. Vileshin, J. Warren, O. Khatib, K.
 The CHAI Libraries F. Conti, F. Barbagli, R. Balaniuk, M. Halg, C. Lu, D. Morris L. Sentis, E. Vileshin, J. Warren, O. Khatib, K. Salisbury Computer Science Department, Stanford University, Stanford CA
The CHAI Libraries F. Conti, F. Barbagli, R. Balaniuk, M. Halg, C. Lu, D. Morris L. Sentis, E. Vileshin, J. Warren, O. Khatib, K. Salisbury Computer Science Department, Stanford University, Stanford CA
Phantom-X. Unnur Gretarsdottir, Federico Barbagli and Kenneth Salisbury
 Phantom-X Unnur Gretarsdottir, Federico Barbagli and Kenneth Salisbury Computer Science Department, Stanford University, Stanford CA 94305, USA, [ unnurg, barbagli, jks ] @stanford.edu Abstract. This paper
Phantom-X Unnur Gretarsdottir, Federico Barbagli and Kenneth Salisbury Computer Science Department, Stanford University, Stanford CA 94305, USA, [ unnurg, barbagli, jks ] @stanford.edu Abstract. This paper
CS123. Programming Your Personal Robot. Part 3: Reasoning Under Uncertainty
 CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty Topics For Part 3 3.1 The Robot Programming Problem What is robot programming Challenges Real World vs. Virtual World Mapping and
CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty Topics For Part 3 3.1 The Robot Programming Problem What is robot programming Challenges Real World vs. Virtual World Mapping and
Virtual Reality Game using Oculus Rift
 CN1 Final Report Virtual Reality Game using Oculus Rift Group Members Chatpol Akkawattanakul (5422792135) Photpinit Kalayanuwatchai (5422770669) Advisor: Dr. Cholwich Nattee Dr. Nirattaya Khamsemanan School
CN1 Final Report Virtual Reality Game using Oculus Rift Group Members Chatpol Akkawattanakul (5422792135) Photpinit Kalayanuwatchai (5422770669) Advisor: Dr. Cholwich Nattee Dr. Nirattaya Khamsemanan School
Force feedback interfaces & applications
 Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
AP1506. Package T5: TO220-5L L : K5: TO263-5L T5R: TO220-5L(R)
") Features General Description oltage: 3.3, 5, 12 and Adjustable ersion Adjustable ersion oltage Range, 1.23 to 18+4% 150KHz +15% Fixed Switching Frequency oltage Mode Non-Synchronous PWM Control Thermal-Shutdown
Features General Description oltage: 3.3, 5, 12 and Adjustable ersion Adjustable ersion oltage Range, 1.23 to 18+4% 150KHz +15% Fixed Switching Frequency oltage Mode Non-Synchronous PWM Control Thermal-Shutdown
Scalable geospatial 3D client applications in X3D - Interactive, online and in real-time
 Scalable geospatial 3D client applications in X3D - Interactive, online and in real-time Dipl.Inform.Univ Peter Schickel CEO Bitmanagement Software Vice President Web3D Consortium, Mountain View, USA OGC/Web3D
Scalable geospatial 3D client applications in X3D - Interactive, online and in real-time Dipl.Inform.Univ Peter Schickel CEO Bitmanagement Software Vice President Web3D Consortium, Mountain View, USA OGC/Web3D
Virtual Experiments as a Tool for Active Engagement
 Virtual Experiments as a Tool for Active Engagement Lei Bao Stephen Stonebraker Gyoungho Lee Physics Education Research Group Department of Physics The Ohio State University Context Cues and Knowledge
Virtual Experiments as a Tool for Active Engagement Lei Bao Stephen Stonebraker Gyoungho Lee Physics Education Research Group Department of Physics The Ohio State University Context Cues and Knowledge
Package K5 : TO263-5L T5 : TO220-5L T5R : TO220-5L(R)
") Features General Description oltage: 3.3, 5, 12 and Adjustable ersion Adjustable ersion oltage Range, 1.23 to 18+4% 150KHz +15% Fixed Switching Frequency oltage Mode Non-Synchronous PWM Control Thermal-Shutdown
Features General Description oltage: 3.3, 5, 12 and Adjustable ersion Adjustable ersion oltage Range, 1.23 to 18+4% 150KHz +15% Fixed Switching Frequency oltage Mode Non-Synchronous PWM Control Thermal-Shutdown
MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL REALITY TECHNOLOGIES
 INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
Virtual Grasping Using a Data Glove
 Virtual Grasping Using a Data Glove By: Rachel Smith Supervised By: Dr. Kay Robbins 3/25/2005 University of Texas at San Antonio Motivation Navigation in 3D worlds is awkward using traditional mouse Direct
Virtual Grasping Using a Data Glove By: Rachel Smith Supervised By: Dr. Kay Robbins 3/25/2005 University of Texas at San Antonio Motivation Navigation in 3D worlds is awkward using traditional mouse Direct
Sensible Chuckle SuperTuxKart Concrete Architecture Report
 Sensible Chuckle SuperTuxKart Concrete Architecture Report Sam Strike - 10152402 Ben Mitchell - 10151495 Alex Mersereau - 10152885 Will Gervais - 10056247 David Cho - 10056519 Michael Spiering Table of
Sensible Chuckle SuperTuxKart Concrete Architecture Report Sam Strike - 10152402 Ben Mitchell - 10151495 Alex Mersereau - 10152885 Will Gervais - 10056247 David Cho - 10056519 Michael Spiering Table of
10 Channel SPI Sensing Circuit
 10 Channel SPI Sensing Circuit QUICK START GUIDE sales@stretchsense.com support@stretchsense.com www.stretchsense.com NZ DDI +64 9 634 1927 US DDI +1 415 800 1003 VERSION 2.0 171016 Contents 01 Step by
10 Channel SPI Sensing Circuit QUICK START GUIDE sales@stretchsense.com support@stretchsense.com www.stretchsense.com NZ DDI +64 9 634 1927 US DDI +1 415 800 1003 VERSION 2.0 171016 Contents 01 Step by
Apple ARKit Overview. 1. Purpose. 2. Apple ARKit. 2.1 Overview. 2.2 Functions
 Apple ARKit Overview 1. Purpose In the 2017 Apple Worldwide Developers Conference, Apple announced a tool called ARKit, which provides advanced augmented reality capabilities on ios. Augmented reality
Apple ARKit Overview 1. Purpose In the 2017 Apple Worldwide Developers Conference, Apple announced a tool called ARKit, which provides advanced augmented reality capabilities on ios. Augmented reality
OPEN ARCHITECTURE FOR EMBEDDING VR BASED MECHANICAL TOOLS IN CAD
 OPEN ARCHITECTURE FOR EMBEDDING VR BASED MECHANICAL TOOLS IN CAD By HRISHIKESH S. JOSHI A thesis submitted in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE IN MECHANICAL ENGINEERING
OPEN ARCHITECTURE FOR EMBEDDING VR BASED MECHANICAL TOOLS IN CAD By HRISHIKESH S. JOSHI A thesis submitted in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE IN MECHANICAL ENGINEERING
Control and robotics remote laboratory for engineering education
 Control and robotics remote laboratory for engineering education R. Šafarič, M. Truntič, D. Hercog and G. Pačnik University of Maribor, Faculty of electrical engineering and computer science, Maribor,
Control and robotics remote laboratory for engineering education R. Šafarič, M. Truntič, D. Hercog and G. Pačnik University of Maribor, Faculty of electrical engineering and computer science, Maribor,
Mobile Audio Designs Monkey: A Tool for Audio Augmented Reality
 Mobile Audio Designs Monkey: A Tool for Audio Augmented Reality Bruce N. Walker and Kevin Stamper Sonification Lab, School of Psychology Georgia Institute of Technology 654 Cherry Street, Atlanta, GA,
Mobile Audio Designs Monkey: A Tool for Audio Augmented Reality Bruce N. Walker and Kevin Stamper Sonification Lab, School of Psychology Georgia Institute of Technology 654 Cherry Street, Atlanta, GA,
Prototyping Future Smart City Forms
 Combining Sensory Technology and BIM Visualize Environmental Impact Source: Perkins + Will By: Dr. Zaki Mallasi, Assistant Professor, Director of Design Computation Lab, Effat University, Saudi Arabia
Combining Sensory Technology and BIM Visualize Environmental Impact Source: Perkins + Will By: Dr. Zaki Mallasi, Assistant Professor, Director of Design Computation Lab, Effat University, Saudi Arabia
Practical Data Visualization and Virtual Reality. Virtual Reality VR Display Systems. Karljohan Lundin Palmerius
 Practical Data Visualization and Virtual Reality Virtual Reality VR Display Systems Karljohan Lundin Palmerius Synopsis Virtual Reality basics Common display systems Visual modality Sound modality Interaction
Practical Data Visualization and Virtual Reality Virtual Reality VR Display Systems Karljohan Lundin Palmerius Synopsis Virtual Reality basics Common display systems Visual modality Sound modality Interaction
Sound rendering in Interactive Multimodal Systems. Federico Avanzini
 Sound rendering in Interactive Multimodal Systems Federico Avanzini Background Outline Ecological Acoustics Multimodal perception Auditory visual rendering of egocentric distance Binaural sound Auditory
Sound rendering in Interactive Multimodal Systems Federico Avanzini Background Outline Ecological Acoustics Multimodal perception Auditory visual rendering of egocentric distance Binaural sound Auditory
TM5. Guide Book. Hardware Version: 2.00 Software Version: 1.62
 TM5 Guide Book Hardware Version: 2.00 Software Version: 1.62 ii Release Date : 2017-07-10 The information contained herein is the property of Techman Robot Corporation (hereinafter referred to as the Corporation).
TM5 Guide Book Hardware Version: 2.00 Software Version: 1.62 ii Release Date : 2017-07-10 The information contained herein is the property of Techman Robot Corporation (hereinafter referred to as the Corporation).
Introduction to Game Design. Truong Tuan Anh CSE-HCMUT
 Introduction to Game Design Truong Tuan Anh CSE-HCMUT Games Games are actually complex applications: interactive real-time simulations of complicated worlds multiple agents and interactions game entities
Introduction to Game Design Truong Tuan Anh CSE-HCMUT Games Games are actually complex applications: interactive real-time simulations of complicated worlds multiple agents and interactions game entities
Using low cost devices to support non-visual interaction with diagrams & cross-modal collaboration
 22 ISSN 2043-0167 Using low cost devices to support non-visual interaction with diagrams & cross-modal collaboration Oussama Metatla, Fiore Martin, Nick Bryan-Kinns and Tony Stockman EECSRR-12-03 June
22 ISSN 2043-0167 Using low cost devices to support non-visual interaction with diagrams & cross-modal collaboration Oussama Metatla, Fiore Martin, Nick Bryan-Kinns and Tony Stockman EECSRR-12-03 June
Precision and high repeat accuracy for individual parts and small series manufacture. Made in Germany.
 PROXXON - PD 400/CNC 1 Precision and high repeat accuracy for individual parts and small series manufacture. Made in Germany. Z-axis and X-axis with recirculating ball spindles and two powerful step motors.
PROXXON - PD 400/CNC 1 Precision and high repeat accuracy for individual parts and small series manufacture. Made in Germany. Z-axis and X-axis with recirculating ball spindles and two powerful step motors.
Overview of current developments in haptic APIs
 Central European Seminar on Computer Graphics for students, 2011 AUTHOR: Petr Kadleček SUPERVISOR: Petr Kmoch Overview of current developments in haptic APIs Presentation Haptics Haptic programming Haptic
Central European Seminar on Computer Graphics for students, 2011 AUTHOR: Petr Kadleček SUPERVISOR: Petr Kmoch Overview of current developments in haptic APIs Presentation Haptics Haptic programming Haptic
E90 Project Proposal. 6 December 2006 Paul Azunre Thomas Murray David Wright
 E90 Project Proposal 6 December 2006 Paul Azunre Thomas Murray David Wright Table of Contents Abstract 3 Introduction..4 Technical Discussion...4 Tracking Input..4 Haptic Feedack.6 Project Implementation....7
E90 Project Proposal 6 December 2006 Paul Azunre Thomas Murray David Wright Table of Contents Abstract 3 Introduction..4 Technical Discussion...4 Tracking Input..4 Haptic Feedack.6 Project Implementation....7
High Speed Wired Data Collection
 High Speed Wired Data Collection Honeywell Bob Dearth Michael Retzler Brad Lucht ISU Prof. Zhengdao Wang Zachary Coffin, Cpr E Radell Young, E E Mazdee Masud, E E Problem and Need Statements Honeywell
High Speed Wired Data Collection Honeywell Bob Dearth Michael Retzler Brad Lucht ISU Prof. Zhengdao Wang Zachary Coffin, Cpr E Radell Young, E E Mazdee Masud, E E Problem and Need Statements Honeywell
SECTION 2. Computer Applications Technology
 SECTION 2 Computer Applications Technology 2.1 What is Computer Applications Technology? Computer Applications Technology is the study of the integrated components of a computer system (such as hardware,
SECTION 2 Computer Applications Technology 2.1 What is Computer Applications Technology? Computer Applications Technology is the study of the integrated components of a computer system (such as hardware,
A Software Framework for Controlling Virtual Reality Avatars via a Brain-Computer Interface
 A Software Framework for Controlling Virtual Reality Avatars via a Brain-Computer Interface Abstract: Denis Porić, Alessandro Mulloni, Robert Leeb, Dieter Schmalstieg This paper discusses the Avatar Control
A Software Framework for Controlling Virtual Reality Avatars via a Brain-Computer Interface Abstract: Denis Porić, Alessandro Mulloni, Robert Leeb, Dieter Schmalstieg This paper discusses the Avatar Control
NX CAM 9.0.2: Gouge Reports for Tapping and Thread Milling. Gouges are no longer reported for Tapping, Hole and Boss Thread Milling.
 Siemens PLM Software NX CAM 9.0.2: Gouge Reports for Tapping and Thread Milling Gouges are no longer reported for Tapping, Hole and Boss Thread Milling. Answers for industry. About NX CAM NX TM CAM software
Siemens PLM Software NX CAM 9.0.2: Gouge Reports for Tapping and Thread Milling Gouges are no longer reported for Tapping, Hole and Boss Thread Milling. Answers for industry. About NX CAM NX TM CAM software
Grade 3 Geometry Rectangle Dimensions
 Grade 3 Geometry Rectangle Dimensions What are the possible dimensions (length and width) of a rectangle that has an area of 16 square centimeters? 3 Geometry Rectangle dimensions What are all the possible
Grade 3 Geometry Rectangle Dimensions What are the possible dimensions (length and width) of a rectangle that has an area of 16 square centimeters? 3 Geometry Rectangle dimensions What are all the possible
Computer Aided Design and Engineering (CAD)
") Oakland Community College 2017-2018 Catalog 1 Computer Aided Design and Engineering (CAD) CAD 1050 Geometric Dimensioning and Tolerancing (GD&T) This course is designed to cover the fundamentals as well
Oakland Community College 2017-2018 Catalog 1 Computer Aided Design and Engineering (CAD) CAD 1050 Geometric Dimensioning and Tolerancing (GD&T) This course is designed to cover the fundamentals as well
Industrial machinery and heavy equipment. Ross Robotics. Solid Edge supports the creative process of exploration and experimentation
 Industrial machinery and heavy equipment Ross Robotics Product Solid Edge The Robosynthesis Modular Platform incorporates clever components that assemble to form a range of reconfigurable robots Business
Industrial machinery and heavy equipment Ross Robotics Product Solid Edge The Robosynthesis Modular Platform incorporates clever components that assemble to form a range of reconfigurable robots Business
Visualize 3D CATIA V5 to JT Composites Add-On Module
 Visualize 3D CATIA V5 to JT Composites Add-On Module USER GUIDE Revision: 1.0 Issued: 10/04/2018 Contents Overview of Visualize 3D CATIA V5 to JT Composites Add-on Module... 2 Primary Product Features...2
Visualize 3D CATIA V5 to JT Composites Add-On Module USER GUIDE Revision: 1.0 Issued: 10/04/2018 Contents Overview of Visualize 3D CATIA V5 to JT Composites Add-on Module... 2 Primary Product Features...2
Qt Developing ArcGIS Runtime Applications. Eric
 Qt Developing ArcGIS Runtime Applications Eric Bader @ECBader Agenda Getting Started Creating the Map Geocoding and Routing Geoprocessing Message Processing Working Offline The Next Release What s Coming
Qt Developing ArcGIS Runtime Applications Eric Bader @ECBader Agenda Getting Started Creating the Map Geocoding and Routing Geoprocessing Message Processing Working Offline The Next Release What s Coming
Proprietary and restricted rights notice
 Proprietary and restricted rights notice This software and related documentation are proprietary to Siemens Product Lifecycle Management Software Inc. 2012 Siemens Product Lifecycle Management Software
Proprietary and restricted rights notice This software and related documentation are proprietary to Siemens Product Lifecycle Management Software Inc. 2012 Siemens Product Lifecycle Management Software
T&E Express SCSU Mobile Lab Program
 T&E Express SCSU Mobile Lab Program Course : Industrial Technology 8 Science Strand and Substrand being addressed Develop a model to generate data for iterative testing and modification of a proposed object,
T&E Express SCSU Mobile Lab Program Course : Industrial Technology 8 Science Strand and Substrand being addressed Develop a model to generate data for iterative testing and modification of a proposed object,
LOOKING AHEAD: UE4 VR Roadmap. Nick Whiting Technical Director VR / AR
 LOOKING AHEAD: UE4 VR Roadmap Nick Whiting Technical Director VR / AR HEADLINE AND IMAGE LAYOUT RECENT DEVELOPMENTS RECENT DEVELOPMENTS At Epic, we drive our engine development by creating content. We
LOOKING AHEAD: UE4 VR Roadmap Nick Whiting Technical Director VR / AR HEADLINE AND IMAGE LAYOUT RECENT DEVELOPMENTS RECENT DEVELOPMENTS At Epic, we drive our engine development by creating content. We
EnSight in Virtual and Mixed Reality Environments
 CEI 2015 User Group Meeting EnSight in Virtual and Mixed Reality Environments VR Hardware that works with EnSight Canon MR Oculus Rift Cave Power Wall Canon MR MR means Mixed Reality User looks through
CEI 2015 User Group Meeting EnSight in Virtual and Mixed Reality Environments VR Hardware that works with EnSight Canon MR Oculus Rift Cave Power Wall Canon MR MR means Mixed Reality User looks through
Toward Recovering Complete SRS for Softbody Simulation System and a Sample Application
 Toward Recovering Complete SRS for Softbody Simulation System and a Sample Application A Team 4 SOEN6481-W13 Project Report Oualid El Halimi Peyman Derafshkavian Abdulrhman Albeladi Faisal Alrashdi o_elhali@encs.concordia.ca
Toward Recovering Complete SRS for Softbody Simulation System and a Sample Application A Team 4 SOEN6481-W13 Project Report Oualid El Halimi Peyman Derafshkavian Abdulrhman Albeladi Faisal Alrashdi o_elhali@encs.concordia.ca
PN7120 NFC Controller SBC Kit User Manual
 Document information Info Content Keywords OM5577, PN7120, Demo kit, Raspberry Pi, BeagleBone Abstract This document is the user manual of the PN7120 NFC Controller SBC kit Revision history Rev Date Description
Document information Info Content Keywords OM5577, PN7120, Demo kit, Raspberry Pi, BeagleBone Abstract This document is the user manual of the PN7120 NFC Controller SBC kit Revision history Rev Date Description
Keysight Technologies Making Field Effect Transistor Characterization Using SMU
 Keysight Technologies Making Field Effect Transistor Characterization Using SMU B2900A Precision Source/Measure Unit Demo Guide Introduction The Keysight s B2900A Series Precision Source/Measure Unit (SMU)
Keysight Technologies Making Field Effect Transistor Characterization Using SMU B2900A Precision Source/Measure Unit Demo Guide Introduction The Keysight s B2900A Series Precision Source/Measure Unit (SMU)
Designing Semantic Virtual Reality Applications
 Designing Semantic Virtual Reality Applications F. Kleinermann, O. De Troyer, H. Mansouri, R. Romero, B. Pellens, W. Bille WISE Research group, Vrije Universiteit Brussel, Pleinlaan 2, 1050 Brussels, Belgium
Designing Semantic Virtual Reality Applications F. Kleinermann, O. De Troyer, H. Mansouri, R. Romero, B. Pellens, W. Bille WISE Research group, Vrije Universiteit Brussel, Pleinlaan 2, 1050 Brussels, Belgium
Sense. 3D Scanner. User Guide. See inside for use and safety information.
 Sense 3D Scanner User Guide See inside for use and safety information. 1 CONTENTS INTRODUCTION.... 3 IMPORTANT SAFETY INFORMATION... 4 Safety Guidelines....4 SENSE 3D SCANNER FEATURES AND PROPERTIES....
Sense 3D Scanner User Guide See inside for use and safety information. 1 CONTENTS INTRODUCTION.... 3 IMPORTANT SAFETY INFORMATION... 4 Safety Guidelines....4 SENSE 3D SCANNER FEATURES AND PROPERTIES....
A Demonstrator for Experimental Testing Integration of Offshore Wind Farms With HVDC Connection. S.D'Arco, A. Endegnanew, SINTEF Energi
 A Demonstrator for Experimental Testing Integration of Offshore Wind Farms With HVDC Connection S.D'Arco, A. Endegnanew, SINTEF Energi BEST PATHS PROJECT BEyond State-of-the-art Technologies for re-powering
A Demonstrator for Experimental Testing Integration of Offshore Wind Farms With HVDC Connection S.D'Arco, A. Endegnanew, SINTEF Energi BEST PATHS PROJECT BEyond State-of-the-art Technologies for re-powering
A High-Level Haptic Interface for Enhanced Interaction within Virtools
 A High-Level Haptic Interface for Enhanced Interaction within Virtools Matthieu Poyade 1, Arcadio Reyes-Lecuona 1, Simo-Pekka Leino 2, Sauli Kiviranta 2, Raquel Viciana-Abad 3, and Salla Lind 2 1 Departamento
A High-Level Haptic Interface for Enhanced Interaction within Virtools Matthieu Poyade 1, Arcadio Reyes-Lecuona 1, Simo-Pekka Leino 2, Sauli Kiviranta 2, Raquel Viciana-Abad 3, and Salla Lind 2 1 Departamento
When paired with a compliant TCXO or OCXO, the Si5328 fully meets the requirements set forth in G.8262/Y ( SyncE ), as shown in Table 1.
, as shown in Table 1.") Si5328: SYNCHRONOUS ETHERNET* COMPLIANCE TEST REPORT 1. Introduction Synchronous Ethernet (SyncE) is a key solution used to distribute Stratum 1 traceable frequency synchronization over packet networks,
Si5328: SYNCHRONOUS ETHERNET* COMPLIANCE TEST REPORT 1. Introduction Synchronous Ethernet (SyncE) is a key solution used to distribute Stratum 1 traceable frequency synchronization over packet networks,
Today. Sketching and Toolkits. Questions? Announcements 10/02/2017. February 9, Finishing coding activity. Sketching.
 Today Finishing coding activity Sketching and Toolkits February 9, 2017 Sketching Toolkits Winter 2017 COMP 4020 2 Announcements Questions? A1/MSI marks are available on UM Learn Feedback is in an attached
Today Finishing coding activity Sketching and Toolkits February 9, 2017 Sketching Toolkits Winter 2017 COMP 4020 2 Announcements Questions? A1/MSI marks are available on UM Learn Feedback is in an attached
Practical Data Visualization and Virtual Reality. Virtual Reality Practical VR Implementation. Karljohan Lundin Palmerius
 Practical Data Visualization and Virtual Reality Virtual Reality Practical VR Implementation Karljohan Lundin Palmerius Scene Graph Directed Acyclic Graph (DAG) Hierarchy of nodes (tree) Reflects hierarchy
Practical Data Visualization and Virtual Reality Virtual Reality Practical VR Implementation Karljohan Lundin Palmerius Scene Graph Directed Acyclic Graph (DAG) Hierarchy of nodes (tree) Reflects hierarchy
Haptics CS327A
 Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Foam Core Construction
 Tools Tips and Tricks X-Acto knife and blades Your most important tool for working with foam core will be an X-Acto knife with plenty of sharp blades. When choosing a knife, get one with replaceable blades
Tools Tips and Tricks X-Acto knife and blades Your most important tool for working with foam core will be an X-Acto knife with plenty of sharp blades. When choosing a knife, get one with replaceable blades
INTERFACING WITH INTERRUPTS AND SYNCHRONIZATION TECHNIQUES
 Faculty of Engineering INTERFACING WITH INTERRUPTS AND SYNCHRONIZATION TECHNIQUES Lab 1 Prepared by Kevin Premrl & Pavel Shering ID # 20517153 20523043 3a Mechatronics Engineering June 8, 2016 1 Phase
Faculty of Engineering INTERFACING WITH INTERRUPTS AND SYNCHRONIZATION TECHNIQUES Lab 1 Prepared by Kevin Premrl & Pavel Shering ID # 20517153 20523043 3a Mechatronics Engineering June 8, 2016 1 Phase
Killzone Shadow Fall: Threading the Entity Update on PS4. Jorrit Rouwé Lead Game Tech, Guerrilla Games
 Killzone Shadow Fall: Threading the Entity Update on PS4 Jorrit Rouwé Lead Game Tech, Guerrilla Games Introduction Killzone Shadow Fall is a First Person Shooter PlayStation 4 launch title In SP up to
Killzone Shadow Fall: Threading the Entity Update on PS4 Jorrit Rouwé Lead Game Tech, Guerrilla Games Introduction Killzone Shadow Fall is a First Person Shooter PlayStation 4 launch title In SP up to
Chapter One : Previous studies
 Summary The industrial design approaches in the concurrent design concept framework The research deals with the industrial design approaches in the concurrent design concept framework, where the concurrent
Summary The industrial design approaches in the concurrent design concept framework The research deals with the industrial design approaches in the concurrent design concept framework, where the concurrent
A Step Forward in Virtual Reality. Department of Electrical and Computer Engineering
 A Step Forward in Virtual Reality Team Step Ryan Daly Electrical Engineer Jared Ricci Electrical Engineer Joseph Roberts Electrical Engineer Steven So Electrical Engineer 2 Motivation Current Virtual Reality
A Step Forward in Virtual Reality Team Step Ryan Daly Electrical Engineer Jared Ricci Electrical Engineer Joseph Roberts Electrical Engineer Steven So Electrical Engineer 2 Motivation Current Virtual Reality
MPEG-V Based Web Haptic Authoring Tool
 MPEG-V Based Web Haptic Authoring Tool by Yu Gao Thesis submitted to the Faculty of Graduate and Postdoctoral Studies In partial fulfillment of the requirements For the M.A.Sc degree in Electrical and
MPEG-V Based Web Haptic Authoring Tool by Yu Gao Thesis submitted to the Faculty of Graduate and Postdoctoral Studies In partial fulfillment of the requirements For the M.A.Sc degree in Electrical and
VIRTUAL REALITY Introduction. Emil M. Petriu SITE, University of Ottawa
 VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
Computer Progression Pathways statements for KS3 & 4. Year 7 National Expectations. Algorithms
 Year 7 National Expectations can show an awareness of tasks best completed by humans or computers. can designs solutions by decomposing a problem and creates a sub-solution for each of these parts (decomposition).
Year 7 National Expectations can show an awareness of tasks best completed by humans or computers. can designs solutions by decomposing a problem and creates a sub-solution for each of these parts (decomposition).
Required Course Numbers. Test Content Categories. Computer Science 8 12 Curriculum Crosswalk Page 2 of 14
 TExES Computer Science 8 12 Curriculum Crosswalk Test Content Categories Domain I Technology Applications Core Competency 001: The computer science teacher knows technology terminology and concepts; the
TExES Computer Science 8 12 Curriculum Crosswalk Test Content Categories Domain I Technology Applications Core Competency 001: The computer science teacher knows technology terminology and concepts; the
PH 481/581 Physical Optics Winter 2013
 PH 481/581 Physical Optics Winter 2013 Laboratory #1 Week of January 14 Read: Handout (Introduction & Projects #2 & 3 from Newport Project in Optics Workbook), pp. 150-170 of "Optics" by Hecht Do: 1. Experiment
PH 481/581 Physical Optics Winter 2013 Laboratory #1 Week of January 14 Read: Handout (Introduction & Projects #2 & 3 from Newport Project in Optics Workbook), pp. 150-170 of "Optics" by Hecht Do: 1. Experiment
OpenSceneGraph Advanced
 OpenSceneGraph Advanced Mikael Drugge Virtual Environments Spring 2005 Based on material from http://www.openscenegraph.org/ Feb-11-2005 SMM009, OpenSceneGraph, Advanced 1 Agenda Hints for installing JavaOSG
OpenSceneGraph Advanced Mikael Drugge Virtual Environments Spring 2005 Based on material from http://www.openscenegraph.org/ Feb-11-2005 SMM009, OpenSceneGraph, Advanced 1 Agenda Hints for installing JavaOSG
OM29110 NFC's SBC Interface Boards User Manual. Rev May
 Document information Info Content Keywords Abstract OM29110, NFC, Demo kit, Raspberry Pi, BeagleBone, Arduino This document is the user manual of the OM29110 NFC s SBC Interface Boards. Revision history
Document information Info Content Keywords Abstract OM29110, NFC, Demo kit, Raspberry Pi, BeagleBone, Arduino This document is the user manual of the OM29110 NFC s SBC Interface Boards. Revision history
Warmup Due: Feb. 6, 2018
 CS1950U Topics in 3D Game Engine Development Barbara Meier Warmup Due: Feb. 6, 2018 Introduction Welcome to CS1950U! In this assignment you ll be creating the basic framework of the game engine you will
CS1950U Topics in 3D Game Engine Development Barbara Meier Warmup Due: Feb. 6, 2018 Introduction Welcome to CS1950U! In this assignment you ll be creating the basic framework of the game engine you will
Haptic Feedback in Mixed-Reality Environment
 The Visual Computer manuscript No. (will be inserted by the editor) Haptic Feedback in Mixed-Reality Environment Renaud Ott, Daniel Thalmann, Frédéric Vexo Virtual Reality Laboratory (VRLab) École Polytechnique
The Visual Computer manuscript No. (will be inserted by the editor) Haptic Feedback in Mixed-Reality Environment Renaud Ott, Daniel Thalmann, Frédéric Vexo Virtual Reality Laboratory (VRLab) École Polytechnique