TACTILE SENSING & FEEDBACK
|
|
|
- Carmel Knight
- 5 years ago
- Views:
Transcription
1 TACTILE SENSING & FEEDBACK Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer-Human Interaction Department of Computer Sciences University of Tampere, Finland
2 Contents Tactile sensing in detail Tactile feedback Feedback technologies & displays 1
3 2 Tactile sensing
4 Tactile sensing There s two different types of receptors responsible for tactile sensing found in the skin free nerve endings encapsulated nerve endings, i.e., mechanoreceptors Most tactile information is delivered via mechanoreceptors but, e.g., hair receptors also affect the sensations Bent hair Indented skin Skin Bent hair RA receptor Indented skin RA receptor Sustained pressure SA receptor 3

5 Mechanoreceptors 1/3 Mechanoreceptors are sensitive to mechanical pressure or deformation of the skin four types: Meissner s corpuscles, Pacinian corpuscles, Merkel s disks and Ruffini endings differ in size, receptive fields, rate of adaptation, location in the skin, and physiological properties 4
6 Mechanoreceptors 2/3 Thresholds of different receptors overlap perceptual qualities of touch are determined by the combined inputs from different types of receptors operating range for the perception of vibration about 0.04 to 500 Hz frequencies over 500 Hz are felt more as textures, not vibration skin surface temperature affects perceiving tactile sensations 5
7 Mechanoreceptors 3/3 Receptor Merkel s disks Ruffini endings Meissner s corpuscles Pacinian corpuscles Rate of adaptation SA-I SA-II RA-I PC (RA-II) Stimulus frequency 0 30 Hz 0 15 Hz Hz Hz Receptive field 2 3 mm >10 mm 3 5 mm >20 mm Location High Deep High Deep Function Pressure; edges and intensity Directional skin stretch, tension Local skin deformation, low frequency vibratory sensations Unlocalized high frequency vibration; tool use Mechanoreceptors are generally specialized to certain stimuli contact forces are detected by Merkel s discs and Ruffini endings vibration primarily stimulates the Meissner s corpuscles and Pacinian corpuscles 6
8 Hairy vs. hairless skin Hairy skin is generally less sensitive to vibration compared to glabrous skin there seems to be no PC receptors in the hairy skin, however, they are present in the deeper underlying tissue surrounding joints and bones Hairy skin has poorer absolute threshold for both vibration & pressure still about the same capacity for discriminating vibrotactile frequencies 7
9 Tactile dimensions Tactile acuity (vibration & pressure) Spatial acuity Temporal acuity 8
10 Tactile acuity for vibration Vibration primarily stimulates the Pacinian corpuscles and Meissner s corpuscles pacinian channel (high frequency, from about 60Hz) non-pacinian channel (low frequency, below 60Hz) Human thresholds for detecting vibration: sensitivity for mechanical vibration increases above 100 Hz and decreases above 320 Hz (250 Hz being optimum) The spatial acuity and pattern perception is better for skin deformation compared to vibrotactile stimuli 9
11 Tactile acuity for pressure Sensitivity for pressure is largely dependant on the area of stimulation discrimination has higher resolution at those parts of the body with a low threshold (e.g. fingertips) Discrimination is not constant throughout the entire intensity scale, as with vision and auditory senses amplitude indentation discrimination is low at low intensities 10
12 Tactile acuity Threshold responses for pressure (bars) and vibration (dots) for 15 body sites human body is highly sensitive for vibration thresholds correlate with the density of cutaneous mechanoreceptors 11
13 Deterioration of tactile acuity There appears to be no significant reduction in vibrotactile detection at the fingertips in older subjects. reflects either the high receptor density of the area, or the functional importance of vibrotactile sensibility of the fingertips (or some combination of both of these factors) Pressure sensitivity reduces as a function of age Training can be used to improve sensimotor performance 12
14 Spatial acuity 1/3 Fingertips are the most sensitive part of the human hand in texture & vibrotactile perception corresponding to the largest density of PC receptors the more spatially distant two stimuli are, the more difficult it is to discriminate them Tactile texture perception is mediated by vibrational cues for fine textures, and by spatial cues for coarse textures discrimination of spatial information is considerably more accurate than their temporal interval when using hand, exploration of spatially varying surfaces is done with the entire fingertip (increased sensitivity by active touch) 13
15 Spatial acuity 2/3 Threshold = the point at which an effect begins to be produced detection threshold (the smallest detectable level of stimulus; a.k.a absolute threshold) difference threshold (the smallest detectable difference between stimuli; a.k.a just noticeable difference (jnd)) Successful method to reduce the detection threshold is either to increase the duration of the tactile stimulation, or the interval of two consecutive stimuli Why do people do better with gratings than twopoint discrimination? active vs. passive touch 14
16 Spatial acuity 3/3 Spatial dimension for touch 2-point discrimination (1 mm at fingertips, mm in the back) localization texture detection (depends on the surface) grating discrimination (detectable distance between two gratings) pressure sensitivity temporal discrimination 15
17 Spatial acuity for pressure 1/2 Spatial acuity for two-point thresholds (bars) and errors of localization (dots) for 14 body sites smallest resolution in facial area & hands differences due to both task demands & neural activity 16
18 Spatial acuity for pressure 2/2 Variation in pressure threshold over the body smallest in facial area fingers have about the same acuity as trunk the right side seems to have slightly better acuity on average 17
19 Temporal acuity Resolution of temporal frequency discrimination is finer at lower frequencies Thresholds for tactile sensations are lowered with increased duration and interval 18
20 Thermotactile interactions Eventhough being separate modalities, temperature and touch have interactions thermal adaptation cooling degrades tactile sensitivity warming sometimes enhances thermal intensification cold objects feel heavier warm objects feel heavier but less than cold ones thermal sharpening the warmer or colder the two points are, the easier they are to discriminate Thermal cues are very important in the identification of textures 19
21 Touch is not an absolute sense Several factors affect the sensitivity age individual differences, habits attention, fatigue, mood, stress diseases, disabilities training... scalability is important factor for tactile interfaces 20
22 Tactile feedback technologies 21
23 Methods for tactile stimulation Types of skin sensory stimulation: skin deformation vibration electric stimulation skin stretch friction (micro skin-stretch) heat Possible actuator configurations: single element multiple elements (array) 22
24 Tactile actuators Some technologies used in tactile interfaces vibrating motors linear motors solenoids piezoelectric actuators pneumatic systems shape memory alloys electrorheological fluids thermoelectric elements 23



25 Actuators: vibrating motors 24
26 Vibrating motors How they work: provides relatively small-amplitude vibration (linear or rotary) applies motion either directly to the skin or through mediating structure used singly or in arrays Most common types DC-motors with eccentric rotating mass voice coils 25



27 Vibrating motors: eccentric rotating mass DC-motor rotates an offcenter spinning mass inexpensive & exsisting technology poor resolution: it takes time to start and stop Frequency control only (amplitude = freq 2 ) amplitude fixed by the size & the weight of the rotating mass Used in various devices mobile phones, pagers, gaming devices, etc. 26
")

28 Vibrating motors: voice coils Voice coil basics current driven through the movable coil created magnetic field interacts with the field of the permanent magnet (one-way movement) vibrations created by switching the current on/off Both frequency and amplitude can be controlled somewhat independently however, the motor has always peak at certain frequencies (e.g. 250 Hz) 27

29 Vibrating motors: overview Advantages: simple, existing technology relatively inexpensive easily powered and controlled quite small power consumption Disadvantages: not very expressive feedback vibration can be irritating sometimes hard to miniaturize efficiently 28

 Have a small rotating DCmotor inside the device which applies")
30 Example: vibrotactile devices Logitech ifeel mouse & Kensington Orbit 3D trackball These ones use the TouchSense technology by Immersion Corporation ( Have a small rotating DCmotor inside the device which applies the vibration through the structure 29


31 Actuators: linear motors 30
32 Linear motors: pin displays How they work: pins in an array are actuated independently the actuated pins contact the surface of the skin Advantages: simple, readily available continuously positionable versatile: static pressure, vibration; shapes or force display relatively fast Disadvantages: very difficult to pack tightly relatively high cost (lots of motors/device) 31


33 Example: tactile array Mimics complex tactile sensations Exeter arrays stimulate the fingertips each pin has piezoelectric actuator Array 1: 100 pins over 1 cm 2, frequency range Hz Array 2: 24 pins with 2 mm spacing, Hz 32
 Allows the user to scan the of an image the pins rise and fall dynamically")
 three 4x8 matrix (32 pins) put in the place of the")
34 Example: tactile arrays in a mouse ( Allows the user to scan the of an image the pins rise and fall dynamically delivering a tactile stimuli to the fingertips can be used to code patterns and colours into tactile data VTMouse (2001) three 4x8 matrix (32 pins) put in the place of the buttons VTPlayer (2003) two 4x4 matrix with 16 pins 33
35 Actuators: solenoids 34
 solenoid driven pin under the right index finger")
 solenoid shakes the pen by moving up and down in")
36 Solenoids Multi-modal mouse by Akamatsu & MacKenzie (1996) solenoid driven pin under the right index finger that rises and falls Haptic Pen by Lee et al. (2004) solenoid shakes the pen by moving up and down in top of the pen 35
 Solenoids have poor power consumption")
37 Example: solenoids in Braille displays Braille = tactile language for sensory substitution Traditionally Braille displays use solenoids to push up the pins (nowadays mostly piezoelectric actuators are used) Solenoids have poor power consumption 36


38 Actuators: piezoelectric actuators 37
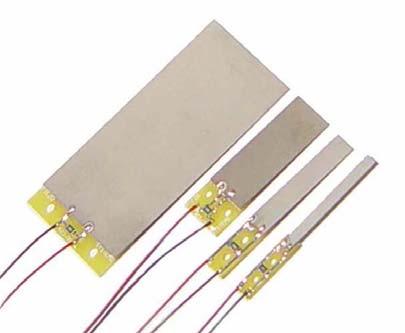
39 Piezoelectric actuators 1/2 How they work: single or multilayer ceramic elements an element expands/bends when voltage is applied multiple layers can be used to amplify the effect Properties: very large forces but small motions one element typically around mm thick resolution for frequencies ~0.01 Hz 38


40 Piezoelectric actuators 2/2 Electromechanical device that converts electrical energy into mechanical motion Typically very compact as only few components are used in a complete system actuator itself can be very small 39
 2D tactile display with an array of miniature actuators stimulate the fingertip at about 1 cm 2 in area elements can be")
41 Example: STReSS & Virtual Braille Display (Hayward et al.) 2D tactile display with an array of miniature actuators stimulate the fingertip at about 1 cm 2 in area elements can be bended in two directions to increase the forces applied to the fingertip 40

42 Example: Tactile Handheld Miniature Bidirectional (THMB) THMB is an improved version of VBD miniaturized to fit inside a PDA-size case The handheld device comprises an LCD screen that allows combining tactile and visual feedback THMB stimulates the user's thumb and is mounted on a vertical slider so that it can be dragged up and down along the left side of the case ( 41
43 Piezoelectric actuators: overview Advantages: small in size potentially inexpensive in large volumes high frequency and static modes very fast response time low power consumption Disadvantages: dynamics: small displacements require accurate amplification high voltage 42
44 Actuators: pneumatic systems 43
45 Pneumatic systems Two possible output modes based on skin indentation (and vibration) suction air-pressure How it works: technologies: fillable air-pockets, air jets, suction holes vibratory rates: typically Hz static pressure with sealed pockets 44
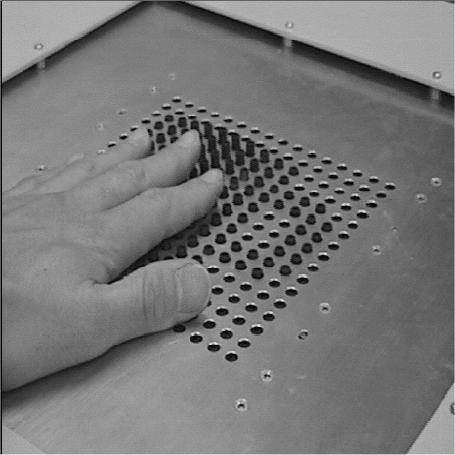
 two basic patterns of stimulation (large holes and small holes) Need for regulation of air pressure (=lots of")
46 Pneumatic systems: suction Draws air from a suction hole creating an illusion that the skin is pushed Very low spatial resolution (only appropriate for the palm) two basic patterns of stimulation (large holes and small holes) Need for regulation of air pressure (=lots of equipment) 45
47 Pneumatic systems: air-pressure DataGlove with pneumatics (Sato et al., 1991) Teletact II (Stone, 1992) DataGlove bandwidth of 5 Hz, amplitude & frequency modulated Teletact II 29+1 air pockets (40 tubes to control the air-pressure) object slippage (fingers) + force feedback (palm) 46
48 Pneumatic systems: overview Advantages: tubing make it possibly to take the bulky part away from point of application pressure can be more appropriate for some applications than pins or vibrating motors can mimic skin-slip (with multiple adjacent inflated pockets) Disadvantages: requires bulky parts (air compressor or motor-driven pistons) not really portable can be very noisy difficult to display sharp edges or discontinuities 47
49 Actuators: shape-memory alloys 48
50 Shape-memory alloys Metals that "remembers" their geometry restores its original geometry when heated usually temperature change of about 10 C is necessary to initiate the phase change How it works: expands (and heats up) when current runs through it contracts when cools down stimulates the skin when vibrates (expandcontract cycles) 49
 Tactile")

51 Shape memory alloys Wearable Tactile Displays (MIT Touchlab) Tactile Display based on Shape Memory Alloy Tactile Display based on Elastomer Actuators 50
52 Actuators: electrorheological fluids 51


53 Electrorheological fluids Liquid which viscosity changes into semi-solid when electric current is applied change in viscosity feels as more resistive surface usually packed in 2-3mm bubbles can change from liquid to gel, and back, within milliseconds The change in viscosity is proportional to the applied current 52
54 Electrorheological fluids: overview Advantages: low power consumption no moving parts controlled electrically very compact performance improves as size decreases Disadvantages: high voltage required can t control force, only viscosity sharp edges and discontinuities difficult to render 53
55 Tactile displays: skin stretch 54


56 Skin-stretch Two main methods: rotational skin stretch lateral skin stretch What happens: forces are applied to skin for displacement contact forces are perceived as stretching of the skin Applying skin stretch is being investigated as an alternative method to vibrotactile feedback 55
57 Friction: skin-slip display Micro skin-stretch motor driven smooth cylinder strapped against finger (Chen and Marcus, 1994) when rotates, stimulates the mechanoreceptors Felt as a sensation of slip grasp simulations: causes the user to increase grip force often used to append force feedback displays 56
58 Tactile displays: electrotactile stimulation 57
59 Electrotactile stimulation Electrical stimulation is not widely accepted to consumer use often sudden bursts give an "invasive" impression square waves can be easily felt as too strong stimuli and they keep tickling the nerves the sensitivity to electrical stimulation varies greatly between and within individuals (e.g., sweating & pressure affect the sensation) Used mostly in research prototypes and for rehabilitation purposes 58

 59")
60 Example: SmartTouch Tactile display to present realistic skin sensation a thin electrotactile display and a sensor mounted Two layers top layer: 4x4 array of stimulating electrodes bottom layer: optical sensors Visual information is captured by the sensors and displayed through electrical stimulation e.g. the black stripes are perceived as bumps ( 59


61 Example: Electric mouse Array of small electrodes placed to fit fingertip 64 electrodes, 1mm in diameter Pressure sensor located under the electrodes to measure finger pressure. electrical current is controlled as a function of pressure creates more stable vibratory sensations compared to traditional displays ( 60

62 Example: Bioforce by Mad Catz (2001) A game controller that delivers mild cramps to the user An electrical shock is delivered by wired pads attached to the forearm 3x1.5V batteries provide 16 ma shocks similar to the shocks used for years by physical therapists 61
Haptic User Interfaces Fall Contents TACTILE SENSING & FEEDBACK. Tactile sensing. Tactile sensing. Mechanoreceptors 2/3. Mechanoreceptors 1/3
 Contents TACTILE SENSING & FEEDBACK Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Tactile
Contents TACTILE SENSING & FEEDBACK Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Tactile
Haptic Perception & Human Response to Vibrations
 Sensing HAPTICS Manipulation Haptic Perception & Human Response to Vibrations Tactile Kinesthetic (position / force) Outline: 1. Neural Coding of Touch Primitives 2. Functions of Peripheral Receptors B
Sensing HAPTICS Manipulation Haptic Perception & Human Response to Vibrations Tactile Kinesthetic (position / force) Outline: 1. Neural Coding of Touch Primitives 2. Functions of Peripheral Receptors B
Touch. Touch & the somatic senses. Josh McDermott May 13,
 The different sensory modalities register different kinds of energy from the environment. Touch Josh McDermott May 13, 2004 9.35 The sense of touch registers mechanical energy. Basic idea: we bump into
The different sensory modalities register different kinds of energy from the environment. Touch Josh McDermott May 13, 2004 9.35 The sense of touch registers mechanical energy. Basic idea: we bump into
Lecture 7: Human haptics
 ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 7: Human haptics Allison M. Okamura Stanford University types of haptic sensing kinesthesia/ proprioception/ force cutaneous/ tactile Related
ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 7: Human haptics Allison M. Okamura Stanford University types of haptic sensing kinesthesia/ proprioception/ force cutaneous/ tactile Related
Proprioception & force sensing
 Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Design of New Micro Actuator for Tactile Display
 Proceedings of the 17th World Congress The International Federation of Automatic Control Design of New Micro Actuator for Tactile Display Tae-Heon Yang*, Sang Youn Kim**, and Dong-Soo Kwon*** * Department
Proceedings of the 17th World Congress The International Federation of Automatic Control Design of New Micro Actuator for Tactile Display Tae-Heon Yang*, Sang Youn Kim**, and Dong-Soo Kwon*** * Department
From Encoding Sound to Encoding Touch
 From Encoding Sound to Encoding Touch Toktam Mahmoodi King s College London, UK http://www.ctr.kcl.ac.uk/toktam/index.htm ETSI STQ Workshop, May 2017 Immersing a person into the real environment with Very
From Encoding Sound to Encoding Touch Toktam Mahmoodi King s College London, UK http://www.ctr.kcl.ac.uk/toktam/index.htm ETSI STQ Workshop, May 2017 Immersing a person into the real environment with Very
Output Devices - Non-Visual
 IMGD 5100: Immersive HCI Output Devices - Non-Visual Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Overview Here we are concerned with
IMGD 5100: Immersive HCI Output Devices - Non-Visual Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Overview Here we are concerned with
Research Article Haptic Stylus and Empirical Studies on Braille, Button, and Texture Display
 Hindawi Publishing Corporation Journal of Biomedicine and Biotechnology Volume 2008, Article ID 369651, 11 pages doi:10.1155/2008/369651 Research Article Haptic Stylus and Empirical Studies on Braille,
Hindawi Publishing Corporation Journal of Biomedicine and Biotechnology Volume 2008, Article ID 369651, 11 pages doi:10.1155/2008/369651 Research Article Haptic Stylus and Empirical Studies on Braille,
The Integument Laboratory
 Name Period Ms. Pfeil A# Activity: 1 Visualizing Changes in Skin Color Due to Continuous External Pressure Go to the supply area and obtain a small glass plate. Press the heel of your hand firmly against
Name Period Ms. Pfeil A# Activity: 1 Visualizing Changes in Skin Color Due to Continuous External Pressure Go to the supply area and obtain a small glass plate. Press the heel of your hand firmly against
Necessary Spatial Resolution for Realistic Tactile Feeling Display
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Necessary Spatial Resolution for Realistic Tactile Feeling Display Naoya ASAMURA, Tomoyuki SHINOHARA,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Necessary Spatial Resolution for Realistic Tactile Feeling Display Naoya ASAMURA, Tomoyuki SHINOHARA,
Tactile sensing system using electro-tactile feedback
 University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2015 Tactile sensing system using electro-tactile
University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2015 Tactile sensing system using electro-tactile
Tactile Actuators Using SMA Micro-wires and the Generation of Texture Sensation from Images
 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November -,. Tokyo, Japan Tactile Actuators Using SMA Micro-wires and the Generation of Texture Sensation from Images Yuto Takeda
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November -,. Tokyo, Japan Tactile Actuators Using SMA Micro-wires and the Generation of Texture Sensation from Images Yuto Takeda
Feeding human senses through Immersion
 Virtual Reality Feeding human senses through Immersion 1. How many human senses? 2. Overview of key human senses 3. Sensory stimulation through Immersion 4. Conclusion Th3.1 1. How many human senses? [TRV
Virtual Reality Feeding human senses through Immersion 1. How many human senses? 2. Overview of key human senses 3. Sensory stimulation through Immersion 4. Conclusion Th3.1 1. How many human senses? [TRV
Selective Stimulation to Skin Receptors by Suction Pressure Control
 Selective Stimulation to Skin Receptors by Suction Pressure Control Yasutoshi MAKINO 1 and Hiroyuki SHINODA 1 1 Department of Information Physics and Computing, Graduate School of Information Science and
Selective Stimulation to Skin Receptors by Suction Pressure Control Yasutoshi MAKINO 1 and Hiroyuki SHINODA 1 1 Department of Information Physics and Computing, Graduate School of Information Science and
VIRTUAL FIGURE PRESENTATION USING PRESSURE- SLIPPAGE-GENERATION TACTILE MOUSE
 VIRTUAL FIGURE PRESENTATION USING PRESSURE- SLIPPAGE-GENERATION TACTILE MOUSE Yiru Zhou 1, Xuecheng Yin 1, and Masahiro Ohka 1 1 Graduate School of Information Science, Nagoya University Email: ohka@is.nagoya-u.ac.jp
VIRTUAL FIGURE PRESENTATION USING PRESSURE- SLIPPAGE-GENERATION TACTILE MOUSE Yiru Zhou 1, Xuecheng Yin 1, and Masahiro Ohka 1 1 Graduate School of Information Science, Nagoya University Email: ohka@is.nagoya-u.ac.jp
Lecture 8: Tactile devices
 ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 8: Tactile devices Allison M. Okamura Stanford University tactile haptic devices tactile feedback goal is to stimulate the skin in a programmable
ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 8: Tactile devices Allison M. Okamura Stanford University tactile haptic devices tactile feedback goal is to stimulate the skin in a programmable
A Pilot Study: Introduction of Time-domain Segment to Intensity-based Perception Model of High-frequency Vibration
 A Pilot Study: Introduction of Time-domain Segment to Intensity-based Perception Model of High-frequency Vibration Nan Cao, Hikaru Nagano, Masashi Konyo, Shogo Okamoto 2 and Satoshi Tadokoro Graduate School
A Pilot Study: Introduction of Time-domain Segment to Intensity-based Perception Model of High-frequency Vibration Nan Cao, Hikaru Nagano, Masashi Konyo, Shogo Okamoto 2 and Satoshi Tadokoro Graduate School
A Method of Selective Stimulation to Epidermal Skin Receptors for Realistic Touch Feedback
 Proceedings of IEEE Virtual Reality '99 Conference A Method of Selective Stimulation to Epidermal Skin Receptors for Realistic Touch Feedback Naoya ASAMURA, Nozomu YOKOYAMA and Hiroyuki SHINODA Department
Proceedings of IEEE Virtual Reality '99 Conference A Method of Selective Stimulation to Epidermal Skin Receptors for Realistic Touch Feedback Naoya ASAMURA, Nozomu YOKOYAMA and Hiroyuki SHINODA Department
Electrical stimulation of mechanoreceptors
 Electrical stimulation of mechanoreceptors AM Echenique, JP Graffigna Gabinete de Tecnología Médica. Universidad Nacional de San Juan Av. Libertador 1109 (oeste). San Juan. Argentina E-mail: amechenique@gateme.unsj.edu.ar
Electrical stimulation of mechanoreceptors AM Echenique, JP Graffigna Gabinete de Tecnología Médica. Universidad Nacional de San Juan Av. Libertador 1109 (oeste). San Juan. Argentina E-mail: amechenique@gateme.unsj.edu.ar
Shape Memory Alloy Actuator Controller Design for Tactile Displays
 34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
Speech, Hearing and Language: work in progress. Volume 12
 Speech, Hearing and Language: work in progress Volume 12 2 Construction of a rotary vibrator and its application in human tactile communication Abbas HAYDARI and Stuart ROSEN Department of Phonetics and
Speech, Hearing and Language: work in progress Volume 12 2 Construction of a rotary vibrator and its application in human tactile communication Abbas HAYDARI and Stuart ROSEN Department of Phonetics and
SmartTouch: Electric Skin to Touch the Untouchable
 SmartTouch: Electric Skin to Touch the Untouchable Hiroyuki Kajimoto (1) Masahiko Inami (2) Naoki Kawakami (1) Susumu Tachi (1) (1)Graduate School of Information Science and Technology, The University
SmartTouch: Electric Skin to Touch the Untouchable Hiroyuki Kajimoto (1) Masahiko Inami (2) Naoki Kawakami (1) Susumu Tachi (1) (1)Graduate School of Information Science and Technology, The University
tactile perception according to texts of Vincent Hayward, J.J Gibson. florian wille // tactile perception // // 1 of 15
 tactile perception according to texts of Vincent Hayward, J.J Gibson. florian wille // tactile perception // 30.11.2009 // 1 of 15 tactile vs visual sense The two senses complement each other. Where as
tactile perception according to texts of Vincent Hayward, J.J Gibson. florian wille // tactile perception // 30.11.2009 // 1 of 15 tactile vs visual sense The two senses complement each other. Where as
Touch & Haptics. Touch & High Information Transfer Rate. Modern Haptics. Human. Haptics
 Touch & Haptics Touch & High Information Transfer Rate Blind and deaf people have been using touch to substitute vision or hearing for a very long time, and successfully. OPTACON Hong Z Tan Purdue University
Touch & Haptics Touch & High Information Transfer Rate Blind and deaf people have been using touch to substitute vision or hearing for a very long time, and successfully. OPTACON Hong Z Tan Purdue University
A Tactile Display using Ultrasound Linear Phased Array
 A Tactile Display using Ultrasound Linear Phased Array Takayuki Iwamoto and Hiroyuki Shinoda Graduate School of Information Science and Technology The University of Tokyo 7-3-, Bunkyo-ku, Hongo, Tokyo,
A Tactile Display using Ultrasound Linear Phased Array Takayuki Iwamoto and Hiroyuki Shinoda Graduate School of Information Science and Technology The University of Tokyo 7-3-, Bunkyo-ku, Hongo, Tokyo,
Haptics ME7960, Sect. 007 Lect. 7: Device Design II
 Haptics ME7960, Sect. 007 Lect. 7: Device Design II Spring 2011 Prof. William Provancher University of Utah Salt Lake City, UT USA We would like to acknowledge the many colleagues whose course materials
Haptics ME7960, Sect. 007 Lect. 7: Device Design II Spring 2011 Prof. William Provancher University of Utah Salt Lake City, UT USA We would like to acknowledge the many colleagues whose course materials
Flexible Active Touch Using 2.5D Display Generating Tactile and Force Sensations
 This is the accepted version of the following article: ICIC Express Letters 6(12):2995-3000 January 2012, which has been published in final form at http://www.ijicic.org/el-6(12).htm Flexible Active Touch
This is the accepted version of the following article: ICIC Express Letters 6(12):2995-3000 January 2012, which has been published in final form at http://www.ijicic.org/el-6(12).htm Flexible Active Touch
Exploring Surround Haptics Displays
 Exploring Surround Haptics Displays Ali Israr Disney Research 4615 Forbes Ave. Suite 420, Pittsburgh, PA 15213 USA israr@disneyresearch.com Ivan Poupyrev Disney Research 4615 Forbes Ave. Suite 420, Pittsburgh,
Exploring Surround Haptics Displays Ali Israr Disney Research 4615 Forbes Ave. Suite 420, Pittsburgh, PA 15213 USA israr@disneyresearch.com Ivan Poupyrev Disney Research 4615 Forbes Ave. Suite 420, Pittsburgh,
Wearable Tactile Device using Mechanical and Electrical Stimulation for Fingertip Interaction with Virtual World
 Wearable Tactile Device using Mechanical and Electrical Stimulation for Fingertip Interaction with Virtual World Vibol Yem* Hiroyuki Kajimoto The University of Electro-Communications, Tokyo, Japan ABSTRACT
Wearable Tactile Device using Mechanical and Electrical Stimulation for Fingertip Interaction with Virtual World Vibol Yem* Hiroyuki Kajimoto The University of Electro-Communications, Tokyo, Japan ABSTRACT
Ultrasound Tactile Display for Stress Field Reproduction -Examination of Non-Vibratory Tactile Apparent Movement-
 Ultrasound Tactile Display for Stress Field Reproduction -Examination of Non-Vibratory Tactile Apparent Movement- Takayuki Iwamoto and Hiroyuki Shinoda Graduate School of Information Science and Technology,
Ultrasound Tactile Display for Stress Field Reproduction -Examination of Non-Vibratory Tactile Apparent Movement- Takayuki Iwamoto and Hiroyuki Shinoda Graduate School of Information Science and Technology,
Haplug: A Haptic Plug for Dynamic VR Interactions
 Haplug: A Haptic Plug for Dynamic VR Interactions Nobuhisa Hanamitsu *, Ali Israr Disney Research, USA nobuhisa.hanamitsu@disneyresearch.com Abstract. We demonstrate applications of a new actuator, the
Haplug: A Haptic Plug for Dynamic VR Interactions Nobuhisa Hanamitsu *, Ali Israr Disney Research, USA nobuhisa.hanamitsu@disneyresearch.com Abstract. We demonstrate applications of a new actuator, the
Haptic Feedback Technology
 Haptic Feedback Technology ECE480: Design Team 4 Application Note Michael Greene Abstract: With the daily interactions between humans and their surrounding technology growing exponentially, the development
Haptic Feedback Technology ECE480: Design Team 4 Application Note Michael Greene Abstract: With the daily interactions between humans and their surrounding technology growing exponentially, the development
WEARABLE HAPTIC DISPLAY FOR IMMERSIVE VIRTUAL ENVIRONMENT
 WEARABLE HAPTIC DISPLAY FOR IMMERSIVE VIRTUAL ENVIRONMENT Yutaka TANAKA*, Hisayuki YAMAUCHI* *, Kenichi AMEMIYA*** * Department of Mechanical Engineering, Faculty of Engineering Hosei University Kajinocho,
WEARABLE HAPTIC DISPLAY FOR IMMERSIVE VIRTUAL ENVIRONMENT Yutaka TANAKA*, Hisayuki YAMAUCHI* *, Kenichi AMEMIYA*** * Department of Mechanical Engineering, Faculty of Engineering Hosei University Kajinocho,
Proceedings of the 33rd ISR (International Symposium on Robotics) October 7 11,
 October 7 11,") Method for eliciting tactile sensation using vibrating stimuli in tangential direction : Effect of frequency, amplitude and wavelength of vibrating stimuli on roughness perception NaoeTatara, Masayuki
Method for eliciting tactile sensation using vibrating stimuli in tangential direction : Effect of frequency, amplitude and wavelength of vibrating stimuli on roughness perception NaoeTatara, Masayuki
Tactile Interfaces: Technologies, Applications and Challenges
 Tactile Interfaces: Technologies, Applications and Challenges M. Hafez and M. Benali Khoudja CEA LIST 18 route du panorama, 92265 Fontenay aux Roses, France Phone: +33-1 46 54 97 31, Fax: +33-1 46 54 75
Tactile Interfaces: Technologies, Applications and Challenges M. Hafez and M. Benali Khoudja CEA LIST 18 route du panorama, 92265 Fontenay aux Roses, France Phone: +33-1 46 54 97 31, Fax: +33-1 46 54 75
Mobile & ubiquitous haptics
 Mobile & ubiquitous haptics Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka Raisamo
Mobile & ubiquitous haptics Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka Raisamo
Graphical User Interfaces for Blind Users: An Overview of Haptic Devices
 Graphical User Interfaces for Blind Users: An Overview of Haptic Devices Hasti Seifi, CPSC554m: Assignment 1 Abstract Graphical user interfaces greatly enhanced usability of computer systems over older
Graphical User Interfaces for Blind Users: An Overview of Haptic Devices Hasti Seifi, CPSC554m: Assignment 1 Abstract Graphical user interfaces greatly enhanced usability of computer systems over older
A cutaneous stretch device for forearm rotational guidace
 Chapter A cutaneous stretch device for forearm rotational guidace Within the project, physical exercises and rehabilitative activities are paramount aspects for the resulting assistive living environment.
Chapter A cutaneous stretch device for forearm rotational guidace Within the project, physical exercises and rehabilitative activities are paramount aspects for the resulting assistive living environment.
702. Investigation of attraction force and vibration of a slipper in a tactile device with electromagnet
 702. Investigation of attraction force and vibration of a slipper in a tactile device with electromagnet Arūnas Žvironas a, Marius Gudauskis b Kaunas University of Technology, Mechatronics Centre for Research,
702. Investigation of attraction force and vibration of a slipper in a tactile device with electromagnet Arūnas Žvironas a, Marius Gudauskis b Kaunas University of Technology, Mechatronics Centre for Research,
Beyond Visual: Shape, Haptics and Actuation in 3D UI
 Beyond Visual: Shape, Haptics and Actuation in 3D UI Ivan Poupyrev Welcome, Introduction, & Roadmap 3D UIs 101 3D UIs 201 User Studies and 3D UIs Guidelines for Developing 3D UIs Video Games: 3D UIs for
Beyond Visual: Shape, Haptics and Actuation in 3D UI Ivan Poupyrev Welcome, Introduction, & Roadmap 3D UIs 101 3D UIs 201 User Studies and 3D UIs Guidelines for Developing 3D UIs Video Games: 3D UIs for
Comparison of Skin Stretch and Vibrotactile Stimulation for Feedback of Proprioceptive Information
 Comparison of Skin Stretch and Vibrotactile Stimulation for Feedback of Proprioceptive Information Karlin Bark Jason W. Wheeler Sunthar Premakumar Mark R. Cutkosky Center for Design Research Department
Comparison of Skin Stretch and Vibrotactile Stimulation for Feedback of Proprioceptive Information Karlin Bark Jason W. Wheeler Sunthar Premakumar Mark R. Cutkosky Center for Design Research Department
Salient features make a search easy
 Chapter General discussion This thesis examined various aspects of haptic search. It consisted of three parts. In the first part, the saliency of movability and compliance were investigated. In the second
Chapter General discussion This thesis examined various aspects of haptic search. It consisted of three parts. In the first part, the saliency of movability and compliance were investigated. In the second
Somatosensory Reception. Somatosensory Reception
 Somatosensory Reception Professor Martha Flanders fland001 @ umn.edu 3-125 Jackson Hall Proprioception, Tactile sensation, (pain and temperature) All mechanoreceptors respond to stretch Classified by adaptation
Somatosensory Reception Professor Martha Flanders fland001 @ umn.edu 3-125 Jackson Hall Proprioception, Tactile sensation, (pain and temperature) All mechanoreceptors respond to stretch Classified by adaptation
Welcome to this course on «Natural Interactive Walking on Virtual Grounds»!
 Welcome to this course on «Natural Interactive Walking on Virtual Grounds»! The speaker is Anatole Lécuyer, senior researcher at Inria, Rennes, France; More information about him at : http://people.rennes.inria.fr/anatole.lecuyer/
Welcome to this course on «Natural Interactive Walking on Virtual Grounds»! The speaker is Anatole Lécuyer, senior researcher at Inria, Rennes, France; More information about him at : http://people.rennes.inria.fr/anatole.lecuyer/
INVESTIGATION OF VHI AFFECTED BY THE DENSITY OF MECHANORECEPTIVE UNITS FOR VIRTUAL SENSATION
 INVESTIGATION OF VHI AFFECTED BY THE DENSITY OF MECHANORECEPTIVE UNITS FOR VIRTUAL SENSATION N.Rajaei 1, M.Ohka 1, T.Miyaoka 2, Hanafiah Yussof 3, Ahmad Khushairy Makhtar 3, Siti Nora Basir 3 1 Graduate
INVESTIGATION OF VHI AFFECTED BY THE DENSITY OF MECHANORECEPTIVE UNITS FOR VIRTUAL SENSATION N.Rajaei 1, M.Ohka 1, T.Miyaoka 2, Hanafiah Yussof 3, Ahmad Khushairy Makhtar 3, Siti Nora Basir 3 1 Graduate
Psychology in Your Life
 Sarah Grison Todd Heatherton Michael Gazzaniga Psychology in Your Life FIRST EDITION Chapter 5 Sensation and Perception 2014 W. W. Norton & Company, Inc. Section 5.1 How Do Sensation and Perception Affect
Sarah Grison Todd Heatherton Michael Gazzaniga Psychology in Your Life FIRST EDITION Chapter 5 Sensation and Perception 2014 W. W. Norton & Company, Inc. Section 5.1 How Do Sensation and Perception Affect
MOBILE AND UBIQUITOUS HAPTICS
 MOBILE AND UBIQUITOUS HAPTICS Jussi Rantala and Jukka Raisamo Tampere Unit for Computer-Human Interaction School of Information Sciences University of Tampere, Finland Contents Haptic communication Affective
MOBILE AND UBIQUITOUS HAPTICS Jussi Rantala and Jukka Raisamo Tampere Unit for Computer-Human Interaction School of Information Sciences University of Tampere, Finland Contents Haptic communication Affective
Vibrotactile Device for Optimizing Skin Response to Vibration Abstract Motivation
 Vibrotactile Device for Optimizing Skin Response to Vibration Kou, W. McGuire, J. Meyer, A. Wang, A. Department of Biomedical Engineering, University of Wisconsin-Madison Abstract It is important to understand
Vibrotactile Device for Optimizing Skin Response to Vibration Kou, W. McGuire, J. Meyer, A. Wang, A. Department of Biomedical Engineering, University of Wisconsin-Madison Abstract It is important to understand
Expression of 2DOF Fingertip Traction with 1DOF Lateral Skin Stretch
 Expression of 2DOF Fingertip Traction with 1DOF Lateral Skin Stretch Vibol Yem 1, Mai Shibahara 2, Katsunari Sato 2, Hiroyuki Kajimoto 1 1 The University of Electro-Communications, Tokyo, Japan 2 Nara
Expression of 2DOF Fingertip Traction with 1DOF Lateral Skin Stretch Vibol Yem 1, Mai Shibahara 2, Katsunari Sato 2, Hiroyuki Kajimoto 1 1 The University of Electro-Communications, Tokyo, Japan 2 Nara
Objective Evaluation of Tactile Sensation for Tactile Communication
 Objective Evaluation of Tactile Sensation for Tactile Communication We clarified the relationship between the surface shapes of touched objects and the strain energ densit caused b deformation of human
Objective Evaluation of Tactile Sensation for Tactile Communication We clarified the relationship between the surface shapes of touched objects and the strain energ densit caused b deformation of human
Design of Cylindrical Whole-hand Haptic Interface using Electrocutaneous Display
 Design of Cylindrical Whole-hand Haptic Interface using Electrocutaneous Display Hiroyuki Kajimoto 1,2 1 The University of Electro-Communications 1-5-1 Chofugaoka, Chofu, Tokyo 182-8585 Japan 2 Japan Science
Design of Cylindrical Whole-hand Haptic Interface using Electrocutaneous Display Hiroyuki Kajimoto 1,2 1 The University of Electro-Communications 1-5-1 Chofugaoka, Chofu, Tokyo 182-8585 Japan 2 Japan Science
the human chapter 1 Traffic lights the human User-centred Design Light Vision part 1 (modified extract for AISD 2005) Information i/o
 Information i/o") Traffic lights chapter 1 the human part 1 (modified extract for AISD 2005) http://www.baddesigns.com/manylts.html User-centred Design Bad design contradicts facts pertaining to human capabilities Usability
Traffic lights chapter 1 the human part 1 (modified extract for AISD 2005) http://www.baddesigns.com/manylts.html User-centred Design Bad design contradicts facts pertaining to human capabilities Usability
Simultaneous presentation of tactile and auditory motion on the abdomen to realize the experience of being cut by a sword
 Simultaneous presentation of tactile and auditory motion on the abdomen to realize the experience of being cut by a sword Sayaka Ooshima 1), Yuki Hashimoto 1), Hideyuki Ando 2), Junji Watanabe 3), and
Simultaneous presentation of tactile and auditory motion on the abdomen to realize the experience of being cut by a sword Sayaka Ooshima 1), Yuki Hashimoto 1), Hideyuki Ando 2), Junji Watanabe 3), and
Combination of Cathodic Electrical Stimulation and Mechanical Damped Sinusoidal Vibration to Express Tactile Softness in the Tapping Process *
 Combination of Cathodic Electrical Stimulation and Mechanical Damped Sinusoidal Vibration to Express Tactile Softness in the Tapping Process * Vibol Yem, Member, IEEE, and Hiroyuki Kajimoto, Member, IEEE
Combination of Cathodic Electrical Stimulation and Mechanical Damped Sinusoidal Vibration to Express Tactile Softness in the Tapping Process * Vibol Yem, Member, IEEE, and Hiroyuki Kajimoto, Member, IEEE
Tactile Vision Substitution with Tablet and Electro-Tactile Display
 Tactile Vision Substitution with Tablet and Electro-Tactile Display Haruya Uematsu 1, Masaki Suzuki 2, Yonezo Kanno 2, Hiroyuki Kajimoto 1 1 The University of Electro-Communications, 1-5-1 Chofugaoka,
Tactile Vision Substitution with Tablet and Electro-Tactile Display Haruya Uematsu 1, Masaki Suzuki 2, Yonezo Kanno 2, Hiroyuki Kajimoto 1 1 The University of Electro-Communications, 1-5-1 Chofugaoka,
Peter Berkelman. ACHI/DigitalWorld
 Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
SmartTouch - Augmentation of Skin Sensation with Electrocutaneous Display
 SmartTouch Augmentation of Skin Sensation with Electrocutaneous Display Hiroyuki Kajimoto Masahiko Inami Naoki Kawakami Susumu Tachi School of Information Science and Technology The University of Tokyo
SmartTouch Augmentation of Skin Sensation with Electrocutaneous Display Hiroyuki Kajimoto Masahiko Inami Naoki Kawakami Susumu Tachi School of Information Science and Technology The University of Tokyo
Localized HD Haptics for Touch User Interfaces
 Localized HD Haptics for Touch User Interfaces Turo Keski-Jaskari, Pauli Laitinen, Aito BV Haptic, or tactile, feedback has rapidly become familiar to the vast majority of consumers, mainly through their
Localized HD Haptics for Touch User Interfaces Turo Keski-Jaskari, Pauli Laitinen, Aito BV Haptic, or tactile, feedback has rapidly become familiar to the vast majority of consumers, mainly through their
Development of Thermal Displays for Haptic Interfaces
 Development of Thermal Displays for Haptic Interfaces by Anshul Singhal B.Tech. in Production and Industrial Engineering Indian Institute of Technology Delhi, 2012 Submitted to the Department of Mechanical
Development of Thermal Displays for Haptic Interfaces by Anshul Singhal B.Tech. in Production and Industrial Engineering Indian Institute of Technology Delhi, 2012 Submitted to the Department of Mechanical
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
SENSATION AND PERCEPTION
 http://www.youtube.com/watch?v=ahg6qcgoay4 SENSATION AND PERCEPTION THE DIFFERENCE Stimuli: an energy source that causes a receptor to become alert to information (light, sound, gaseous molecules, etc)
http://www.youtube.com/watch?v=ahg6qcgoay4 SENSATION AND PERCEPTION THE DIFFERENCE Stimuli: an energy source that causes a receptor to become alert to information (light, sound, gaseous molecules, etc)
Designing Pseudo-Haptic Feedback Mechanisms for Communicating Weight in Decision Making Tasks
 Appeared in the Proceedings of Shikakeology: Designing Triggers for Behavior Change, AAAI Spring Symposium Series 2013 Technical Report SS-12-06, pp.107-112, Palo Alto, CA., March 2013. Designing Pseudo-Haptic
Appeared in the Proceedings of Shikakeology: Designing Triggers for Behavior Change, AAAI Spring Symposium Series 2013 Technical Report SS-12-06, pp.107-112, Palo Alto, CA., March 2013. Designing Pseudo-Haptic
Remote Tactile Transmission with Time Delay for Robotic Master Slave Systems
 Advanced Robotics 25 (2011) 1271 1294 brill.nl/ar Full paper Remote Tactile Transmission with Time Delay for Robotic Master Slave Systems S. Okamoto a,, M. Konyo a, T. Maeno b and S. Tadokoro a a Graduate
Advanced Robotics 25 (2011) 1271 1294 brill.nl/ar Full paper Remote Tactile Transmission with Time Delay for Robotic Master Slave Systems S. Okamoto a,, M. Konyo a, T. Maeno b and S. Tadokoro a a Graduate
Evaluation of Five-finger Haptic Communication with Network Delay
 Tactile Communication Haptic Communication Network Delay Evaluation of Five-finger Haptic Communication with Network Delay To realize tactile communication, we clarify some issues regarding how delay affects
Tactile Communication Haptic Communication Network Delay Evaluation of Five-finger Haptic Communication with Network Delay To realize tactile communication, we clarify some issues regarding how delay affects
Robot Sensors Introduction to Robotics Lecture Handout September 20, H. Harry Asada Massachusetts Institute of Technology
 Robot Sensors 2.12 Introduction to Robotics Lecture Handout September 20, 2004 H. Harry Asada Massachusetts Institute of Technology Touch Sensor CCD Camera Vision System Ultrasonic Sensor Photo removed
Robot Sensors 2.12 Introduction to Robotics Lecture Handout September 20, 2004 H. Harry Asada Massachusetts Institute of Technology Touch Sensor CCD Camera Vision System Ultrasonic Sensor Photo removed
TACTILE DISPLAY DEVICE USING DISTRIBUTED LATERAL SKIN STRETCH
 TACTILE DISPLAY DEVICE USING DISTRIBUTED LATERAL SKIN STRETCH Vincent Hayward Juan Manuel Cruz-Hernández Department of Electrical Engineering and Center for Intelligent Machines McGill University 3480
TACTILE DISPLAY DEVICE USING DISTRIBUTED LATERAL SKIN STRETCH Vincent Hayward Juan Manuel Cruz-Hernández Department of Electrical Engineering and Center for Intelligent Machines McGill University 3480
Technologies. Philippe Fuchs Ecole des Mines, ParisTech, Paris, France. Virtual Reality: Concepts and. Guillaume Moreau.
 Virtual Reality: Concepts and Technologies Editors Philippe Fuchs Ecole des Mines, ParisTech, Paris, France Guillaume Moreau Ecole Centrale de Nantes, CERMA, Nantes, France Pascal Guitton INRIA, University
Virtual Reality: Concepts and Technologies Editors Philippe Fuchs Ecole des Mines, ParisTech, Paris, France Guillaume Moreau Ecole Centrale de Nantes, CERMA, Nantes, France Pascal Guitton INRIA, University
Compact Tactile Display for Fingertips with Multiple Vibrotactile Actuator and Thermoelectric Module
 7 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 7 Compact Tactile Display for Fingertips with Multiple Vibrotactile Actuator and Thermoelectric Module Gi-Hun Yang, Tae-Heon
7 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 7 Compact Tactile Display for Fingertips with Multiple Vibrotactile Actuator and Thermoelectric Module Gi-Hun Yang, Tae-Heon
Illusion of Surface Changes induced by Tactile and Visual Touch Feedback
 Illusion of Surface Changes induced by Tactile and Visual Touch Feedback Katrin Wolf University of Stuttgart Pfaffenwaldring 5a 70569 Stuttgart Germany katrin.wolf@vis.uni-stuttgart.de Second Author VP
Illusion of Surface Changes induced by Tactile and Visual Touch Feedback Katrin Wolf University of Stuttgart Pfaffenwaldring 5a 70569 Stuttgart Germany katrin.wolf@vis.uni-stuttgart.de Second Author VP
Electronic Systems - B1 23/04/ /04/ SisElnB DDC. Chapter 2
 Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
ELECTRONIC SYSTEMS. Introduction. B1 - Sensors and actuators. Introduction
 Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
Politecnico di Torino - ICT school Goup B - goals ELECTRONIC SYSTEMS B INFORMATION PROCESSING B.1 Systems, sensors, and actuators» System block diagram» Analog and digital signals» Examples of sensors»
Principles of Active Vibration Control: Basics of active vibration control methods
 Principles of Active Vibration Control: Basics of active vibration control methods INTRODUCTION Vibration control is aimed at reducing or modifying the vibration level of a mechanical structure. Contrary
Principles of Active Vibration Control: Basics of active vibration control methods INTRODUCTION Vibration control is aimed at reducing or modifying the vibration level of a mechanical structure. Contrary
Haptic, vestibular and other physical input/output devices
 Human Touch Sensing - recap Haptic, vestibular and other physical input/output devices SGN-5406 Virtual Reality Autumn 2007 ismo.rakkolainen@tut.fi The human sensitive areas for touch: Hand, face Many
Human Touch Sensing - recap Haptic, vestibular and other physical input/output devices SGN-5406 Virtual Reality Autumn 2007 ismo.rakkolainen@tut.fi The human sensitive areas for touch: Hand, face Many
Vibrotactile Apparent Movement by DC Motors and Voice-coil Tactors
 Vibrotactile Apparent Movement by DC Motors and Voice-coil Tactors Masataka Niwa 1,2, Yasuyuki Yanagida 1, Haruo Noma 1, Kenichi Hosaka 1, and Yuichiro Kume 3,1 1 ATR Media Information Science Laboratories
Vibrotactile Apparent Movement by DC Motors and Voice-coil Tactors Masataka Niwa 1,2, Yasuyuki Yanagida 1, Haruo Noma 1, Kenichi Hosaka 1, and Yuichiro Kume 3,1 1 ATR Media Information Science Laboratories
Tactile Sensing - From Humans to Humanoids
 1 Tactile Sensing - From Humans to Humanoids Ravinder S. Dahiya, Student Member, IEEE, Giorgio Metta, Maurizio Valle, Member, IEEE and Giulio Sandini Abstract Starting from human sense of touch, this work
1 Tactile Sensing - From Humans to Humanoids Ravinder S. Dahiya, Student Member, IEEE, Giorgio Metta, Maurizio Valle, Member, IEEE and Giulio Sandini Abstract Starting from human sense of touch, this work
Biomimetic Design of Actuators, Sensors and Robots
 Biomimetic Design of Actuators, Sensors and Robots Takashi Maeno, COE Member of autonomous-cooperative robotics group Department of Mechanical Engineering Keio University Abstract Biological life has greatly
Biomimetic Design of Actuators, Sensors and Robots Takashi Maeno, COE Member of autonomous-cooperative robotics group Department of Mechanical Engineering Keio University Abstract Biological life has greatly
Creating Science Tactile Mazes & our Sense of Touch
 Creating Science Tactile Mazes & our Sense of Touch It helps to keep us safe and warm, what would we do without it?! #CreatingScienceTactileMazes Suggested outcomes (NOTE: This is by no means an exhaustive
Creating Science Tactile Mazes & our Sense of Touch It helps to keep us safe and warm, what would we do without it?! #CreatingScienceTactileMazes Suggested outcomes (NOTE: This is by no means an exhaustive
Sensing self motion. Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems
 Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
Toward Principles for Visual Interaction Design for Communicating Weight by using Pseudo-Haptic Feedback
 Toward Principles for Visual Interaction Design for Communicating Weight by using Pseudo-Haptic Feedback Kumiyo Nakakoji Key Technology Laboratory SRA Inc. 2-32-8 Minami-Ikebukuro, Toshima, Tokyo, 171-8513,
Toward Principles for Visual Interaction Design for Communicating Weight by using Pseudo-Haptic Feedback Kumiyo Nakakoji Key Technology Laboratory SRA Inc. 2-32-8 Minami-Ikebukuro, Toshima, Tokyo, 171-8513,
Wearable Haptic Display to Present Gravity Sensation
 Wearable Haptic Display to Present Gravity Sensation Preliminary Observations and Device Design Kouta Minamizawa*, Hiroyuki Kajimoto, Naoki Kawakami*, Susumu, Tachi* (*) The University of Tokyo, Japan
Wearable Haptic Display to Present Gravity Sensation Preliminary Observations and Device Design Kouta Minamizawa*, Hiroyuki Kajimoto, Naoki Kawakami*, Susumu, Tachi* (*) The University of Tokyo, Japan
Sensation. Our sensory and perceptual processes work together to help us sort out complext processes
 Sensation Our sensory and perceptual processes work together to help us sort out complext processes Sensation Bottom-Up Processing analysis that begins with the sense receptors and works up to the brain
Sensation Our sensory and perceptual processes work together to help us sort out complext processes Sensation Bottom-Up Processing analysis that begins with the sense receptors and works up to the brain
Human Factors. We take a closer look at the human factors that affect how people interact with computers and software:
 Human Factors We take a closer look at the human factors that affect how people interact with computers and software: Physiology physical make-up, capabilities Cognition thinking, reasoning, problem-solving,
Human Factors We take a closer look at the human factors that affect how people interact with computers and software: Physiology physical make-up, capabilities Cognition thinking, reasoning, problem-solving,
TOUCH screens are an indispensable part of our lives.
 JOURNAL OF L A T E X CLASS FILES, VOL., NO., 218 1 Tactile Masking by Electrovibration Yasemin Vardar, Member, IEEE, Burak Güçlü, and Cagatay Basdogan, Member, IEEE Abstract Future touch screen applications
JOURNAL OF L A T E X CLASS FILES, VOL., NO., 218 1 Tactile Masking by Electrovibration Yasemin Vardar, Member, IEEE, Burak Güçlü, and Cagatay Basdogan, Member, IEEE Abstract Future touch screen applications
HapticArmrest: Remote Tactile Feedback on Touch Surfaces Using Combined Actuators
 HapticArmrest: Remote Tactile Feedback on Touch Surfaces Using Combined Actuators Hendrik Richter, Sebastian Löhmann, Alexander Wiethoff University of Munich, Germany {hendrik.richter, sebastian.loehmann,
HapticArmrest: Remote Tactile Feedback on Touch Surfaces Using Combined Actuators Hendrik Richter, Sebastian Löhmann, Alexander Wiethoff University of Munich, Germany {hendrik.richter, sebastian.loehmann,
Virtual Chromatic Percussions Simulated by Pseudo-Haptic and Vibrotactile Feedback
 Virtual Chromatic Percussions Simulated by Pseudo-Haptic and Vibrotactile Feedback Taku Hachisu The University of Electro- Communications 1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan +81 42 443 5363
Virtual Chromatic Percussions Simulated by Pseudo-Haptic and Vibrotactile Feedback Taku Hachisu The University of Electro- Communications 1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan +81 42 443 5363
PROPRIOCEPTION AND FORCE FEEDBACK
 PROPRIOCEPTION AND FORCE FEEDBACK Roope Raisamo and Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere,
PROPRIOCEPTION AND FORCE FEEDBACK Roope Raisamo and Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere,
Input-output channels
 Input-output channels Human Computer Interaction (HCI) Human input Using senses Sight, hearing, touch, taste and smell Sight, hearing & touch have important role in HCI Input-Output Channels Human output
Input-output channels Human Computer Interaction (HCI) Human input Using senses Sight, hearing, touch, taste and smell Sight, hearing & touch have important role in HCI Input-Output Channels Human output
Design and Controll of Haptic Glove with McKibben Pneumatic Muscle
 XXVIII. ASR '2003 Seminar, Instruments and Control, Ostrava, May 6, 2003 173 Design and Controll of Haptic Glove with McKibben Pneumatic Muscle KOPEČNÝ, Lukáš Ing., Department of Control and Instrumentation,
XXVIII. ASR '2003 Seminar, Instruments and Control, Ostrava, May 6, 2003 173 Design and Controll of Haptic Glove with McKibben Pneumatic Muscle KOPEČNÝ, Lukáš Ing., Department of Control and Instrumentation,
Touch and tactile perception for robots
 Touch and tactile perception for robots Václav Hlaváč Czech Technical University in Prague (ČVUT) Czech Institute of Informatics, Robotics, and Cybernetics (CIIRC) Prague 6, Jugoslávských partyzánů 1580/3
Touch and tactile perception for robots Václav Hlaváč Czech Technical University in Prague (ČVUT) Czech Institute of Informatics, Robotics, and Cybernetics (CIIRC) Prague 6, Jugoslávských partyzánů 1580/3
International Journal of Advanced Research in Computer Science and Software Engineering
 Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Study on SensAble
Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Study on SensAble
can easily be integrated with electronics for signal processing, etc. by fabricating
 Glossary Active touch The process where objects are dynamically explored by a finger or hand as in object contour following. Adaptive thresholding A procedure in which a stimulus is interactively increased
Glossary Active touch The process where objects are dynamically explored by a finger or hand as in object contour following. Adaptive thresholding A procedure in which a stimulus is interactively increased
An Emotional Tactile Interface Completing with Extremely High Temporal Bandwidth
 SICE Annual Conference 2008 August 20-22, 2008, The University Electro-Communications, Japan An Emotional Tactile Interface Completing with Extremely High Temporal Bandwidth Yuki Hashimoto 1 and Hiroyuki
SICE Annual Conference 2008 August 20-22, 2008, The University Electro-Communications, Japan An Emotional Tactile Interface Completing with Extremely High Temporal Bandwidth Yuki Hashimoto 1 and Hiroyuki
Perception of pitch. Definitions. Why is pitch important? BSc Audiology/MSc SHS Psychoacoustics wk 5: 12 Feb A. Faulkner.
 Perception of pitch BSc Audiology/MSc SHS Psychoacoustics wk 5: 12 Feb 2009. A. Faulkner. See Moore, BCJ Introduction to the Psychology of Hearing, Chapter 5. Or Plack CJ The Sense of Hearing Lawrence
Perception of pitch BSc Audiology/MSc SHS Psychoacoustics wk 5: 12 Feb 2009. A. Faulkner. See Moore, BCJ Introduction to the Psychology of Hearing, Chapter 5. Or Plack CJ The Sense of Hearing Lawrence
The aim of this experiment is for students to familiarize themselves with their senses, sensory and related phenomena, and some sensory illusions.
 Sensory Physiology The aim of this experiment is for students to familiarize themselves with their senses, sensory and related phenomena, and some sensory illusions. Written by staff of ADInstruments.
Sensory Physiology The aim of this experiment is for students to familiarize themselves with their senses, sensory and related phenomena, and some sensory illusions. Written by staff of ADInstruments.
Heads up interaction: glasgow university multimodal research. Eve Hoggan
 Heads up interaction: glasgow university multimodal research Eve Hoggan www.tactons.org multimodal interaction Multimodal Interaction Group Key area of work is Multimodality A more human way to work Not
Heads up interaction: glasgow university multimodal research Eve Hoggan www.tactons.org multimodal interaction Multimodal Interaction Group Key area of work is Multimodality A more human way to work Not
Haptic Sensing and Perception for Telerobotic Manipulation
 Haptic Sensing and Perception for Telerobotic Manipulation Emil M. Petriu, Dr. Eng., P.Eng., FIEEE Professor School of Information Technology and Engineering University of Ottawa Ottawa, ON., K1N 6N5 Canada
Haptic Sensing and Perception for Telerobotic Manipulation Emil M. Petriu, Dr. Eng., P.Eng., FIEEE Professor School of Information Technology and Engineering University of Ottawa Ottawa, ON., K1N 6N5 Canada
Touch and tactile perception for robots
 Touch and tactile perception for robots Václav Hlaváč Czech Technical University () Czech Institute of Informatics, Robotics, and Cybernetics (CIIRC) Prague 6, Zikova 4, Czech Republic hlavac@ciirc.cvut.cz
Touch and tactile perception for robots Václav Hlaváč Czech Technical University () Czech Institute of Informatics, Robotics, and Cybernetics (CIIRC) Prague 6, Zikova 4, Czech Republic hlavac@ciirc.cvut.cz
Computer Haptics and Applications
 Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Development of Wearable Micro-Actuator Array for 3-D Virtual Tactile Displays
 Journal of Electromagnetic Analysis and Applications, 2012, 4, 219-229 http://dx.doi.org/10.4236/jemaa.2012.46031 Published Online June 2012 (http://www.scirp.org/journal/jemaa) 219 Development of Wearable
Journal of Electromagnetic Analysis and Applications, 2012, 4, 219-229 http://dx.doi.org/10.4236/jemaa.2012.46031 Published Online June 2012 (http://www.scirp.org/journal/jemaa) 219 Development of Wearable