Today s Assignment. Outline. Course Objective 1: Agent Architectures. Agent Architecture (Objective 1) Types of Agents (Objective 1)
|
|
|
- Sybil Johnston
- 6 years ago
- Views:
Transcription
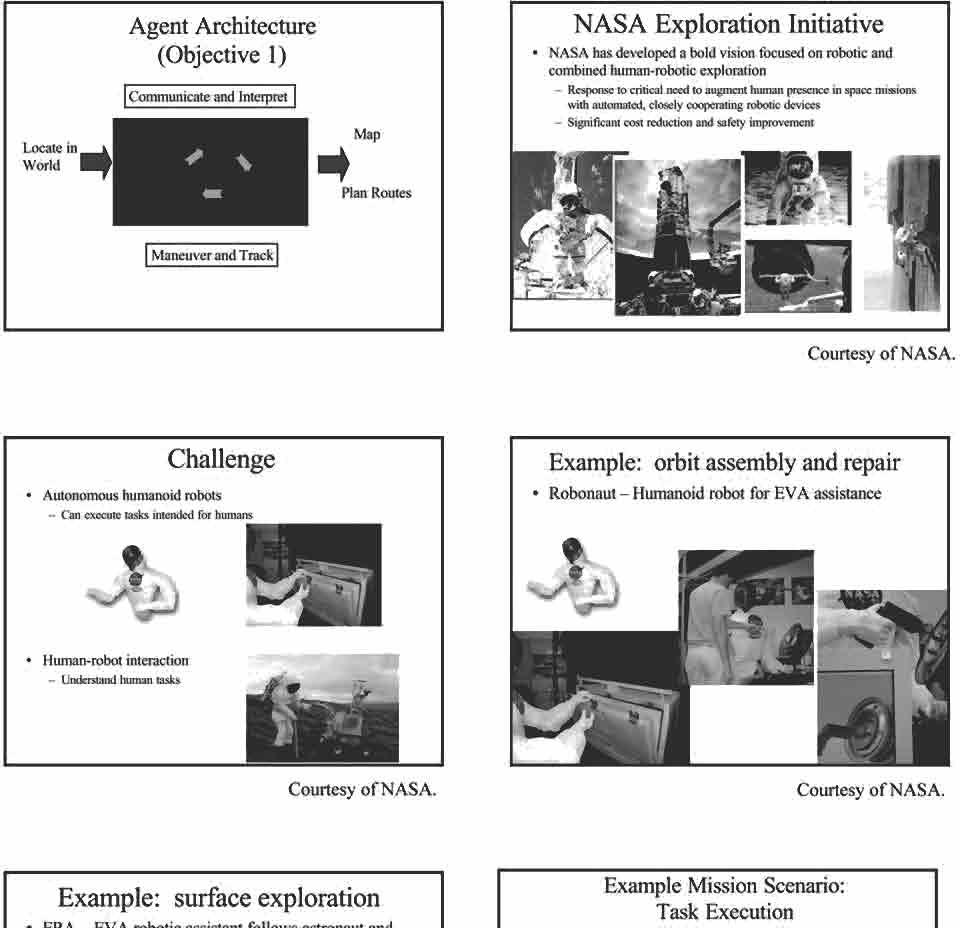
1 Principles of Autonomy and Decision Making Brian Williams / Session 1 Today s Assignment Read Chapters 1 and 2 of AIMA Artificial Intelligence: A Modern Approach by Stuart Russell and Peter Norvig Begin reading Java in a Nutshell 1 Outline Objectives and Logistics Agents and Their Building Blocks Course Objective 1: Agent Architectures 1. To appreciate the major types of agents, their major functions and the applications they support. 2. To understand the common architectures used to develop agents. Understanding exercised through case studies. Types of Agents (Objective 1) Mission-oriented Agents Self-repairing Agents Mobile Agents Agile Agents Communicating Agents Locate in World Agent Architecture (Objective 1) Communicate and Interpret Monitor & Diagnosis Plan Execute Map Plan Routes Maneuver and Track 1
2 Course Objective 2: Principles of Agents Agent Building Blocks /13: To learn the modeling and algorithmic building blocks for creating reasoning and learning agents: 1. To formulate reasoning problems in an appropriate formal representation. 2. To describe, analyze and demonstrate the application of reasoning algorithms to solve these problem formulations. Understanding demonstrated on paper and through implementation. Introduction to modeling, algorithms and analysis the next two Wednesday. Introduction to implementation the next two Mondays. Activity Planning Execution/Monitoring Diagnosis Repair Scheduling Resource Allocation Path Planning Localization Map Building Trajectory Design Policy Construction Course Objective 3: Implementing Agents : To appreciate the challenges of building a state of the art autonomous explorer: Fall 03: Mars Exploration Rover shadow mode demonstration. Fall 04: Gnu Robot competition. Fall 05: Model-based autonomy toolbox The virtual solar system Stay tuned for more. Text and Language Text Artificial Intelligence: A Modern Approach by Stuart Russell and Peter Norvig 2 nd Edition (not 1 st Edition!!) Programming All programming in Java text Java in a Nutshell Outline Objectives and Logistics Agents and Their Building Blocks Types of Agents (objective 1) 1. Mission-oriented Agents 2. Self-repairing Agents 3. Mobile Agents 4. Agile Agents 5. Communicating Agents 2

3


4 Types of Agents (objective 1) 1. Mission-oriented Agents 2. Self-repairing Agents 3. Mobile Agents 4. Agile Agents 5. Communicating Agents 7 year cruise ~ ground operators ~ 1 billion $ 7 years to build 2. Self-Repairing Agents Affordable Missions 150 million $ 2 year build 0 ground ops Cassini Maps Titan courtesy JPL Four launches in 7 months Mars Polar Lander Mars Climate Orbiter: 12/11/98 Mars Polar Lander: 1/3/9 Stardust: 2/7/99 QuickSCAT: 6/19/98 Spacecraft require a good physical commonsense courtesy of JP Launch: 1/3/99 courtesy of JPL Traditional spacecraft commanding Houston, we have a problem... Quintuple fault occurs GS,SITURN,490UA,BOTH,96-355/03:42:00.000; (three shorts, tank-line and pressure jacket burst, panel C MD,7G YO N, 490 UA 412A4 A, BOT H, /03: 47 :00:000, ON ; C MD,7M OD E, 490 UA 412A4 B, BOT H, /03: 47 :02:000, IN T; C MD,6S VP M, 490 UA 412A6 A, BOT H, /03: 48 :30:000, 2; flies off) C MD,7A LR T, 490 UA 412A4 C, BOT H, /03: 50 :32:000, 6; C MD,7S AF E, 490 UA 412A4 D, BOT H, /03: 52 :00:000, UN STO W; Diagnosis. C MD,6A SS AN, 490 UA 412A6 B, BOT H, /03: 56 :08:000, GV,153, IM M,2 31, GV,153; Mattingly works in ground C MD,7V EC T, 490 UA 412A4 E, BOT H, /03: 56 :10.000, 0, 191.5,6.5, 0.0,0.0,0.0, simulator to identify new / 00 :00:00.000,M VR; sequence handling severe S EB,SC TE ST, 490 UA 412A23A,BO TH, /03: 56 :12.000, SY S1, NP ER R; C MD,7T UR N, 490 UA 412A4 F, BOT H, /03: 56 :14.000, 1, MVR ; power limitations. M IS C,N OT E, 490 UA 412A99A,, /04: 00 :00.000,,S TAR T OF TU RN ;, C MD,7S TA R, 490 UA 412A406 A4A,B OTH /04: 00 :02.000, 7, 1701, ,38.74; C MD,7S TA R, 490 UA 412A406 A4B,B OTH,96-355/04: 00 :04.000, 8, 350, , ; C MD,7S TA R, 490 UA 412A406 A4C,B OTH,96-355/04: 00 :06.000, 9, 875, , ; C MD,7S TA R, 490 UA 412A406 A4D,B OTH,96-355/04: 00 :08.000, 10,159, , ; C MD,7S TA R, 490 UA 412A406 A4E,B OTH,96-355/04: 00 :10.000, 11,0, 0.0, 0.0 ; C MD,7S TA R, 490 UA 412A406 A4F,B OTH,96-355/04: 00 :12.000, 21,0, 0.0, 0.0 ; Whats a better paradigm? courtesy of NASA Planning & Resource Allocation Mattingly identifies novel reconfiguration, exploiting LEM batteries for power. Reconfiguration and Repair Swaggert & Lovell work on Apollo 13 emergency rig lithium hydroxide unit. Execution Courtesy of Kanna Rajan, NASA Ames. Used with permission. 4

5

6
7 Agent Building Blocks (Objective 2) Agent Architecture (Objective 1) Activity Planning Path Planning Execution/Monitoring Diagnosis Repair Scheduling Resource Allocation Localization Map Building Locate in World Monitor & Diagnosis Plan Execute Map Plan Routes Types of Agents (objective 1) 4. Agile Agents 1. Mission-oriented Agents 2. Self-repairing Agents 3. Mobile Agents 4. Agile Agents 5. Communicating Agents 7
 Types of Agents (objective 1) Locate in World Monitor & Diagnosis Plan Execute Map Plan Routes 1. Mission-oriented Agents 2. Self-repairing Agents 3. Mobile Agents 4.")
8 Agent Building Blocks Activity Planning Execution/Monitoring Diagnosis Repair Scheduling Resource Allocation Path Planning Localization Map Building Trajectory Design Policy Construction Agent Architecture (Objective 1) Types of Agents (objective 1) Locate in World Monitor & Diagnosis Plan Execute Map Plan Routes 1. Mission-oriented Agents 2. Self-repairing Agents 3. Mobile Agents 4. Agile Agents 5. Communicating Agents Maneuver and Track 5. Communicating Agents Agent Building Blocks (Objective 1) Activity Planning Execution/Monitoring Diagnosis Repair Scheduling Resource Allocation Path Planning Localization Map Building Trajectory Design Policy Construction Plan Adaptation Dialogue Management People Tracking 8

9
10 Outline Objectives Agents and Their Building Blocks Agent Paradigms 10
Principles of Autonomy and Decision Making. Brian C. Williams / December 10 th, 2003
 Principles of Autonomy and Decision Making Brian C. Williams 16.410/16.413 December 10 th, 2003 1 Outline Objectives Agents and Their Building Blocks Principles for Building Agents: Modeling Formalisms
Principles of Autonomy and Decision Making Brian C. Williams 16.410/16.413 December 10 th, 2003 1 Outline Objectives Agents and Their Building Blocks Principles for Building Agents: Modeling Formalisms
Introduction to Principles of Autonomy and Decision Making. Today s Assignment
 Introduction to Principles of Autonomy and Decision Making Brian C. Williams Brian C. Williams 16.410/16.413 16.410/16.413 September 3 September 3 rd, rd, 2003 2003 1 Today s Assignment Read Chapters 1
Introduction to Principles of Autonomy and Decision Making Brian C. Williams Brian C. Williams 16.410/16.413 16.410/16.413 September 3 September 3 rd, rd, 2003 2003 1 Today s Assignment Read Chapters 1
and : Principles of Autonomy and Decision Making. Prof Brian Williams, Prof Emilio Frazzoli and Sertac Karaman September, 8 th, 2010
 16.410 and 16.412: Principles of Autonomy and Decision Making Prof Brian Williams, Prof Emilio Frazzoli and Sertac Karaman September, 8 th, 2010 1 1 Assignments Homework: Class signup, return at end of
16.410 and 16.412: Principles of Autonomy and Decision Making Prof Brian Williams, Prof Emilio Frazzoli and Sertac Karaman September, 8 th, 2010 1 1 Assignments Homework: Class signup, return at end of
Spacecraft Autonomy. Seung H. Chung. Massachusetts Institute of Technology Satellite Engineering Fall 2003
 Spacecraft Autonomy Seung H. Chung Massachusetts Institute of Technology 16.851 Satellite Engineering Fall 2003 Why Autonomy? Failures Anomalies Communication Coordination Courtesy of the Johns Hopkins
Spacecraft Autonomy Seung H. Chung Massachusetts Institute of Technology 16.851 Satellite Engineering Fall 2003 Why Autonomy? Failures Anomalies Communication Coordination Courtesy of the Johns Hopkins
Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics?
 16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations and Exploration Systems
 Walt Truszkowski, Harold L. Hallock, Christopher Rouff, Jay Karlin, James Rash, Mike Hinchey, and Roy Sterritt Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations
Walt Truszkowski, Harold L. Hallock, Christopher Rouff, Jay Karlin, James Rash, Mike Hinchey, and Roy Sterritt Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations
Introduction To Cognitive Robots
 Introduction To Cognitive Robots Prof. Brian Williams Rm 33-418 Wednesday, February 2 nd, 2004 Outline Examples of Robots as Explorers Course Objectives Student Introductions and Goals Introduction to
Introduction To Cognitive Robots Prof. Brian Williams Rm 33-418 Wednesday, February 2 nd, 2004 Outline Examples of Robots as Explorers Course Objectives Student Introductions and Goals Introduction to
CS343 Artificial Intelligence
 CS343 Artificial Intelligence Prof: Department of Computer Science The University of Texas at Austin Good Morning, Colleagues Good Morning, Colleagues Are there any questions? Logistics Questions about
CS343 Artificial Intelligence Prof: Department of Computer Science The University of Texas at Austin Good Morning, Colleagues Good Morning, Colleagues Are there any questions? Logistics Questions about
Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots
 16-782 Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Class Logistics Instructor:
16-782 Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Class Logistics Instructor:
NASA s X2000 Program - an Institutional Approach to Enabling Smaller Spacecraft
 NASA s X2000 Program - an Institutional Approach to Enabling Smaller Spacecraft Dr. Leslie J. Deutsch and Chris Salvo Advanced Flight Systems Program Jet Propulsion Laboratory California Institute of Technology
NASA s X2000 Program - an Institutional Approach to Enabling Smaller Spacecraft Dr. Leslie J. Deutsch and Chris Salvo Advanced Flight Systems Program Jet Propulsion Laboratory California Institute of Technology
COMP9414: Artificial Intelligence Problem Solving and Search
 CMP944, Monday March, 0 Problem Solving and Search CMP944: Artificial Intelligence Problem Solving and Search Motivating Example You are in Romania on holiday, in Arad, and need to get to Bucharest. What
CMP944, Monday March, 0 Problem Solving and Search CMP944: Artificial Intelligence Problem Solving and Search Motivating Example You are in Romania on holiday, in Arad, and need to get to Bucharest. What
Exploration Systems Research & Technology
 Exploration Systems Research & Technology NASA Institute of Advanced Concepts Fellows Meeting 16 March 2005 Dr. Chris Moore Exploration Systems Mission Directorate NASA Headquarters Nation s Vision for
Exploration Systems Research & Technology NASA Institute of Advanced Concepts Fellows Meeting 16 March 2005 Dr. Chris Moore Exploration Systems Mission Directorate NASA Headquarters Nation s Vision for
Credits. National Aeronautics and Space Administration. United Space Alliance, LLC. John Frassanito and Associates Strategic Visualization
 A New Age in Space The Vision for Space Exploration Credits National Aeronautics and Space Administration United Space Alliance, LLC John Frassanito and Associates Strategic Visualization Coalition for
A New Age in Space The Vision for Space Exploration Credits National Aeronautics and Space Administration United Space Alliance, LLC John Frassanito and Associates Strategic Visualization Coalition for
APGEN: A Multi-Mission Semi-Automated Planning Tool
 APGEN: A Multi-Mission Semi-Automated Planning Tool Pierre F. Maldague Adam;Y.Ko Dennis N. Page Thomas W. Starbird Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove dr. Pasadena,
APGEN: A Multi-Mission Semi-Automated Planning Tool Pierre F. Maldague Adam;Y.Ko Dennis N. Page Thomas W. Starbird Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove dr. Pasadena,
U.S. Space Exploration in the Next 20 NASA Space Sciences Policy
 U.S. Space Exploration in the Next 20 ScienceYears: to Inspire, Science to Serve NASA Space Sciences Policy National Aeronautics and Space Administration Waleed Abdalati NASA Chief Scientist Waleed Abdalati
U.S. Space Exploration in the Next 20 ScienceYears: to Inspire, Science to Serve NASA Space Sciences Policy National Aeronautics and Space Administration Waleed Abdalati NASA Chief Scientist Waleed Abdalati
NASA Mission Directorates
 NASA Mission Directorates 1 NASA s Mission NASA's mission is to pioneer future space exploration, scientific discovery, and aeronautics research. 0 NASA's mission is to pioneer future space exploration,
NASA Mission Directorates 1 NASA s Mission NASA's mission is to pioneer future space exploration, scientific discovery, and aeronautics research. 0 NASA's mission is to pioneer future space exploration,
Constraint Satisfaction Problems: Formulation
 Constraint Satisfaction Problems: Formulation Slides adapted from: 6.0 Tomas Lozano Perez and AIMA Stuart Russell & Peter Norvig Brian C. Williams 6.0- September 9 th, 00 Reading Assignments: Much of the
Constraint Satisfaction Problems: Formulation Slides adapted from: 6.0 Tomas Lozano Perez and AIMA Stuart Russell & Peter Norvig Brian C. Williams 6.0- September 9 th, 00 Reading Assignments: Much of the
Introduction to Artificial Intelligence
 Introduction to Artificial Intelligence By Budditha Hettige Sources: Based on An Introduction to Multi-agent Systems by Michael Wooldridge, John Wiley & Sons, 2002 Artificial Intelligence A Modern Approach,
Introduction to Artificial Intelligence By Budditha Hettige Sources: Based on An Introduction to Multi-agent Systems by Michael Wooldridge, John Wiley & Sons, 2002 Artificial Intelligence A Modern Approach,
C. R. Weisbin, R. Easter, G. Rodriguez January 2001
 on Solar System Bodies --Abstract of a Projected Comparative Performance Evaluation Study-- C. R. Weisbin, R. Easter, G. Rodriguez January 2001 Long Range Vision of Surface Scenarios Technology Now 5 Yrs
on Solar System Bodies --Abstract of a Projected Comparative Performance Evaluation Study-- C. R. Weisbin, R. Easter, G. Rodriguez January 2001 Long Range Vision of Surface Scenarios Technology Now 5 Yrs
2009 ESMD Space Grant Faculty Project
 2009 ESMD Space Grant Faculty Project 1 Objectives Train and develop the highly skilled scientific, engineering and technical workforce of the future needed to implement space exploration missions: In
2009 ESMD Space Grant Faculty Project 1 Objectives Train and develop the highly skilled scientific, engineering and technical workforce of the future needed to implement space exploration missions: In
Application of Artificial Neural Networks in Autonomous Mission Planning for Planetary Rovers
 Application of Artificial Neural Networks in Autonomous Mission Planning for Planetary Rovers 1 Institute of Deep Space Exploration Technology, School of Aerospace Engineering, Beijing Institute of Technology,
Application of Artificial Neural Networks in Autonomous Mission Planning for Planetary Rovers 1 Institute of Deep Space Exploration Technology, School of Aerospace Engineering, Beijing Institute of Technology,
The Lunar Split Mission: Concepts for Robotically Constructed Lunar Bases
 2005 International Lunar Conference Renaissance Toronto Hotel Downtown, Toronto, Ontario, Canada The Lunar Split Mission: Concepts for Robotically Constructed Lunar Bases George Davis, Derek Surka Emergent
2005 International Lunar Conference Renaissance Toronto Hotel Downtown, Toronto, Ontario, Canada The Lunar Split Mission: Concepts for Robotically Constructed Lunar Bases George Davis, Derek Surka Emergent
CPE/CSC 580: Intelligent Agents
 CPE/CSC 580: Intelligent Agents Franz J. Kurfess Computer Science Department California Polytechnic State University San Luis Obispo, CA, U.S.A. 1 Course Overview Introduction Intelligent Agent, Multi-Agent
CPE/CSC 580: Intelligent Agents Franz J. Kurfess Computer Science Department California Polytechnic State University San Luis Obispo, CA, U.S.A. 1 Course Overview Introduction Intelligent Agent, Multi-Agent
Low-Cost Innovation in the U.S. Space Program: A Brief History
 Low-Cost Innovation in the U.S. Space Program: A Brief History 51 st Robert H. Goddard Memorial Symposium March 20, 2013 Howard E. McCurdy What do these activities have in common? Commercial clients on
Low-Cost Innovation in the U.S. Space Program: A Brief History 51 st Robert H. Goddard Memorial Symposium March 20, 2013 Howard E. McCurdy What do these activities have in common? Commercial clients on
COMP219: Artificial Intelligence. Lecture 2: AI Problems and Applications
 COMP219: Artificial Intelligence Lecture 2: AI Problems and Applications 1 Introduction Last time General module information Characterisation of AI and what it is about Today Overview of some common AI
COMP219: Artificial Intelligence Lecture 2: AI Problems and Applications 1 Introduction Last time General module information Characterisation of AI and what it is about Today Overview of some common AI
CS343 Introduction to Artificial Intelligence Spring 2010
 CS343 Introduction to Artificial Intelligence Spring 2010 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
CS343 Introduction to Artificial Intelligence Spring 2010 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
CYLICAL VISITS TO MARS VIA ASTRONAUT HOTELS
 CYLICAL VISITS TO MARS VIA ASTRONAUT HOTELS Presentation to the NASA Institute of Advanced Concepts (NIAC) 2000 Annual Meeting by Kerry T. Nock Global June 7, 2000 Global TOPICS MOTIVATION OVERVIEW SIGNIFICANCE
CYLICAL VISITS TO MARS VIA ASTRONAUT HOTELS Presentation to the NASA Institute of Advanced Concepts (NIAC) 2000 Annual Meeting by Kerry T. Nock Global June 7, 2000 Global TOPICS MOTIVATION OVERVIEW SIGNIFICANCE
CS343 Introduction to Artificial Intelligence Spring 2012
 CS343 Introduction to Artificial Intelligence Spring 2012 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
CS343 Introduction to Artificial Intelligence Spring 2012 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
Constellation Systems Division
 Lunar National Aeronautics and Exploration Space Administration www.nasa.gov Constellation Systems Division Introduction The Constellation Program was formed to achieve the objectives of maintaining American
Lunar National Aeronautics and Exploration Space Administration www.nasa.gov Constellation Systems Division Introduction The Constellation Program was formed to achieve the objectives of maintaining American
Overview Agents, environments, typical components
 Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Requirements Gathering using Object- Oriented Models
 Requirements Gathering using Object- Oriented Models Quality Assurance introduction What is Quality? Quality is defined as conformance to requirements Quality is not a measure of GOODNESS Phil B. Crosby,
Requirements Gathering using Object- Oriented Models Quality Assurance introduction What is Quality? Quality is defined as conformance to requirements Quality is not a measure of GOODNESS Phil B. Crosby,
Genetic Algorithm Based Charge Optimization of Lithium-Ion Batteries in Small Satellites. Saurabh Jain Dan Simon
 Genetic Algorithm Based Charge Optimization of Lithium-Ion Batteries in Small Satellites Saurabh Jain Dan Simon Outline Problem Identification Solution approaches Our strategy Problem representation Modified
Genetic Algorithm Based Charge Optimization of Lithium-Ion Batteries in Small Satellites Saurabh Jain Dan Simon Outline Problem Identification Solution approaches Our strategy Problem representation Modified
Autonomous Control for Unmanned
 Autonomous Control for Unmanned Surface Vehicles December 8, 2016 Carl Conti, CAPT, USN (Ret) Spatial Integrated Systems, Inc. SIS Corporate Profile Small Business founded in 1997, focusing on Research,
Autonomous Control for Unmanned Surface Vehicles December 8, 2016 Carl Conti, CAPT, USN (Ret) Spatial Integrated Systems, Inc. SIS Corporate Profile Small Business founded in 1997, focusing on Research,
MSL Lessons Learned Study. Presentation to NAC Planetary Protection Subcommittee April 29, 2013 Mark Saunders, Study Lead
 MSL Lessons Learned Study Presentation to NAC Planetary Protection Subcommittee April 29, 2013 Mark Saunders, Study Lead 1 Purpose Identify and document proximate and root causes of significant challenges
MSL Lessons Learned Study Presentation to NAC Planetary Protection Subcommittee April 29, 2013 Mark Saunders, Study Lead 1 Purpose Identify and document proximate and root causes of significant challenges
CPS331 Lecture: Agents and Robots last revised April 27, 2012
 CPS331 Lecture: Agents and Robots last revised April 27, 2012 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
CPS331 Lecture: Agents and Robots last revised April 27, 2012 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Pure Versus Applied Informatics
 Pure Versus Applied Informatics A. J. Cowling Department of Computer Science University of Sheffield Structure of Presentation Introduction The structure of mathematics as a discipline. Analysing Pure
Pure Versus Applied Informatics A. J. Cowling Department of Computer Science University of Sheffield Structure of Presentation Introduction The structure of mathematics as a discipline. Analysing Pure
Goals of this Course. CSE 473 Artificial Intelligence. AI as Science. AI as Engineering. Dieter Fox Colin Zheng
 CSE 473 Artificial Intelligence Dieter Fox Colin Zheng www.cs.washington.edu/education/courses/cse473/08au Goals of this Course To introduce you to a set of key: Paradigms & Techniques Teach you to identify
CSE 473 Artificial Intelligence Dieter Fox Colin Zheng www.cs.washington.edu/education/courses/cse473/08au Goals of this Course To introduce you to a set of key: Paradigms & Techniques Teach you to identify
The Emergence. The Strategic Importance of Spacecraft Autonomy
 From: AAAI-97 Proceedings. Copyright 1997, AAAI (www.aaai.org). All rights reserved. The Emergence of S Richard J. Doyle Information and Computing Technologies Research Section Autonomy Technology Program
From: AAAI-97 Proceedings. Copyright 1997, AAAI (www.aaai.org). All rights reserved. The Emergence of S Richard J. Doyle Information and Computing Technologies Research Section Autonomy Technology Program
Dan Dvorak and Lorraine Fesq Jet Propulsion Laboratory, California Institute of Technology. Jonathan Wilmot NASA Goddard Space Flight Center
 Jet Propulsion Laboratory Quality Attributes for Mission Flight Software: A Reference for Architects Dan Dvorak and Lorraine Fesq Jet Propulsion Laboratory, Jonathan Wilmot NASA Goddard Space Flight Center
Jet Propulsion Laboratory Quality Attributes for Mission Flight Software: A Reference for Architects Dan Dvorak and Lorraine Fesq Jet Propulsion Laboratory, Jonathan Wilmot NASA Goddard Space Flight Center
Elements of Artificial Intelligence and Expert Systems
 Elements of Artificial Intelligence and Expert Systems Master in Data Science for Economics, Business & Finance Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135 Milano (MI) Ufficio
Elements of Artificial Intelligence and Expert Systems Master in Data Science for Economics, Business & Finance Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135 Milano (MI) Ufficio
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
CS 380: ARTIFICIAL INTELLIGENCE INTRODUCTION. Santiago Ontañón
 CS 380: ARTIFICIAL INTELLIGENCE INTRODUCTION Santiago Ontañón so367@drexel.edu CS 380 Focus: Introduction to AI: basic concepts and algorithms. Topics: What is AI? Problem Solving and Heuristic Search
CS 380: ARTIFICIAL INTELLIGENCE INTRODUCTION Santiago Ontañón so367@drexel.edu CS 380 Focus: Introduction to AI: basic concepts and algorithms. Topics: What is AI? Problem Solving and Heuristic Search
Multi-Agent Planning
 25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
Deep Space Communication The further you go, the harder it gets. D. Kanipe, Sept. 2013
 Deep Space Communication The further you go, the harder it gets D. Kanipe, Sept. 2013 Deep Space Communication Introduction Obstacles: enormous distances, S/C mass and power limits International Telecommunications
Deep Space Communication The further you go, the harder it gets D. Kanipe, Sept. 2013 Deep Space Communication Introduction Obstacles: enormous distances, S/C mass and power limits International Telecommunications
CMRE La Spezia, Italy
 Innovative Interoperable M&S within Extended Maritime Domain for Critical Infrastructure Protection and C-IED CMRE La Spezia, Italy Agostino G. Bruzzone 1,2, Alberto Tremori 1 1 NATO STO CMRE& 2 Genoa
Innovative Interoperable M&S within Extended Maritime Domain for Critical Infrastructure Protection and C-IED CMRE La Spezia, Italy Agostino G. Bruzzone 1,2, Alberto Tremori 1 1 NATO STO CMRE& 2 Genoa
Future Directions: Strategy for Human and Robotic Exploration. Gary L. Martin Space Architect
 Future Directions: Strategy for Human and Robotic Exploration Gary L. Martin Space Architect September, 2003 Robust Exploration Strategy Traditional Approach: A Giant Leap (Apollo) Cold War competition
Future Directions: Strategy for Human and Robotic Exploration Gary L. Martin Space Architect September, 2003 Robust Exploration Strategy Traditional Approach: A Giant Leap (Apollo) Cold War competition
Space Challenges Preparing the next generation of explorers. The Program
 Space Challenges Preparing the next generation of explorers Space Challenges is the biggest free educational program in the field of space science and high technologies in the Balkans - http://spaceedu.net
Space Challenges Preparing the next generation of explorers Space Challenges is the biggest free educational program in the field of space science and high technologies in the Balkans - http://spaceedu.net
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing
 A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
Framework Programme 7
 Framework Programme 7 1 Joining the EU programmes as a Belarusian 1. Introduction to the Framework Programme 7 2. Focus on evaluation issues + exercise 3. Strategies for Belarusian organisations + exercise
Framework Programme 7 1 Joining the EU programmes as a Belarusian 1. Introduction to the Framework Programme 7 2. Focus on evaluation issues + exercise 3. Strategies for Belarusian organisations + exercise
CPS331 Lecture: Agents and Robots last revised November 18, 2016
 CPS331 Lecture: Agents and Robots last revised November 18, 2016 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
CPS331 Lecture: Agents and Robots last revised November 18, 2016 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents 3. To introduce the subsumption architecture
Workshop on Intelligent System and Applications (ISA 17)
") Telemetry Mining for Space System Sara Abdelghafar Ahmed PhD student, Al-Azhar University Member of SRGE Workshop on Intelligent System and Applications (ISA 17) 13 May 2017 Workshop on Intelligent System
Telemetry Mining for Space System Sara Abdelghafar Ahmed PhD student, Al-Azhar University Member of SRGE Workshop on Intelligent System and Applications (ISA 17) 13 May 2017 Workshop on Intelligent System
A DEEP SPACE COMPANY BY A WORLD TEAM THE FED EXPRESS OF THE 21ST CENTURY TONY SPEAR OCTOBER 2007
 A DEEP SPACE COMPANY BY A WORLD TEAM THE FED EXPRESS OF THE 21ST CENTURY TONY SPEAR OCTOBER 2007 1 PURPOSE OF THIS PRESENTATION TO INFORM YOU OF AN EXCITING SPACE OPPORTUNITY IN 2007 HUMANS CELEBRATE 50
A DEEP SPACE COMPANY BY A WORLD TEAM THE FED EXPRESS OF THE 21ST CENTURY TONY SPEAR OCTOBER 2007 1 PURPOSE OF THIS PRESENTATION TO INFORM YOU OF AN EXCITING SPACE OPPORTUNITY IN 2007 HUMANS CELEBRATE 50
CSE 473 Artificial Intelligence (AI) Outline
 Outline") CSE 473 Artificial Intelligence (AI) Rajesh Rao (Instructor) Ravi Kiran (TA) http://www.cs.washington.edu/473 UW CSE AI faculty Goals of this course Logistics What is AI? Examples Challenges Outline 2
CSE 473 Artificial Intelligence (AI) Rajesh Rao (Instructor) Ravi Kiran (TA) http://www.cs.washington.edu/473 UW CSE AI faculty Goals of this course Logistics What is AI? Examples Challenges Outline 2
QUEST Vision for Exploration of Space
 QUEST for Human Exploration of the Solar System GSAW99 NASA/JSC/Lynn R. Vernon 1 Why are we Here? Present a vision of the Ground and Space architecture to support the Human exploration of space. Develop
QUEST for Human Exploration of the Solar System GSAW99 NASA/JSC/Lynn R. Vernon 1 Why are we Here? Present a vision of the Ground and Space architecture to support the Human exploration of space. Develop
Introduction to Multi-Agent Programming
 Introduction to Multi-Agent Programming 1. Introduction Organizational, MAS and Applications, RoboCup Alexander Kleiner, Bernhard Nebel Lecture Material Artificial Intelligence A Modern Approach, 2 nd
Introduction to Multi-Agent Programming 1. Introduction Organizational, MAS and Applications, RoboCup Alexander Kleiner, Bernhard Nebel Lecture Material Artificial Intelligence A Modern Approach, 2 nd
CPS331 Lecture: Intelligent Agents last revised July 25, 2018
 CPS331 Lecture: Intelligent Agents last revised July 25, 2018 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents Materials: 1. Projectable of Russell and Norvig
CPS331 Lecture: Intelligent Agents last revised July 25, 2018 Objectives: 1. To introduce the basic notion of an agent 2. To discuss various types of agents Materials: 1. Projectable of Russell and Norvig
SIMULATING RESOURCE SHARING IN SPACECRAFT CLUSTERS USING MULTI-AGENT-SYSTEMS. Jürgen Leitner (1)
") ABSTRACT SIMULATING RESOURCE SHARING IN SPACECRAFT CLUSTERS USING MULTI-AGENT-SYSTEMS Jürgen Leitner (1) (1) European Space Agency, Advanced Concepts Team, jurgen.leitner@esa.int, +31 71 56 58518, Keplerlaan
ABSTRACT SIMULATING RESOURCE SHARING IN SPACECRAFT CLUSTERS USING MULTI-AGENT-SYSTEMS Jürgen Leitner (1) (1) European Space Agency, Advanced Concepts Team, jurgen.leitner@esa.int, +31 71 56 58518, Keplerlaan
For Winter /12/2006
 AE483 Organizational Meeting For Winter 2007 12/12/2006 Today s Meeting Basic info about the course Course organization Course output (deliverables) Proposed projects Ballot for project selection due in
AE483 Organizational Meeting For Winter 2007 12/12/2006 Today s Meeting Basic info about the course Course organization Course output (deliverables) Proposed projects Ballot for project selection due in
Benefiting government, industry and the public through innovative science and technology
 Benefiting government, industry and the public through innovative science and technology SwRI in the First Decade Tom Slick signed charter in 1947 Fewer than 20 employees Initial budget
Benefiting government, industry and the public through innovative science and technology SwRI in the First Decade Tom Slick signed charter in 1947 Fewer than 20 employees Initial budget
Space in the next MFF Commision proposals
 Space in the next MFF Commision proposals EPIC Workshop London, 15-17 Ocotber 2018 Apostolia Karamali Deputy Head of Unit Space Policy and Research European Commission European Space Policy context 2 A
Space in the next MFF Commision proposals EPIC Workshop London, 15-17 Ocotber 2018 Apostolia Karamali Deputy Head of Unit Space Policy and Research European Commission European Space Policy context 2 A
Introduction. Abstract
 From: Proceedings of the Twelfth International FLAIRS Conference. Copyright 1999, AAAI (www.aaai.org). All rights reserved. An Overview of Agent Technology for Satellite Autonomy Paul Zetocha Lance Self
From: Proceedings of the Twelfth International FLAIRS Conference. Copyright 1999, AAAI (www.aaai.org). All rights reserved. An Overview of Agent Technology for Satellite Autonomy Paul Zetocha Lance Self
Engineering Autonomy
 Engineering Autonomy Mr. Robert Gold Director, Engineering Enterprise Office of the Deputy Assistant Secretary of Defense for Systems Engineering 20th Annual NDIA Systems Engineering Conference Springfield,
Engineering Autonomy Mr. Robert Gold Director, Engineering Enterprise Office of the Deputy Assistant Secretary of Defense for Systems Engineering 20th Annual NDIA Systems Engineering Conference Springfield,
CS 730/830: Intro AI. Prof. Wheeler Ruml. TA Bence Cserna. Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1
 CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
The JPL A-Team and Mission Formulation Process
 The JPL A-Team and Mission Formulation Process 2017 Low-Cost Planetary Missions Conference Caltech Pasadena, CA Steve Matousek, Advanced Concept Methods Manager JPL s Innovation Foundry jplfoundry.jpl.nasa.gov
The JPL A-Team and Mission Formulation Process 2017 Low-Cost Planetary Missions Conference Caltech Pasadena, CA Steve Matousek, Advanced Concept Methods Manager JPL s Innovation Foundry jplfoundry.jpl.nasa.gov
HEOMD Update NRC Aeronautics and Space Engineering Board Oct. 16, 2014
 National Aeronautics and Space Administration HEOMD Update NRC Aeronautics and Space Engineering Board Oct. 16, 2014 Greg Williams DAA for Policy and Plans Human Exploration and Operations Mission Directorate
National Aeronautics and Space Administration HEOMD Update NRC Aeronautics and Space Engineering Board Oct. 16, 2014 Greg Williams DAA for Policy and Plans Human Exploration and Operations Mission Directorate
Asteroid Redirect Mission (ARM) Update to the Small Bodies Assessment Group
 Update to the Small Bodies Assessment Group") National Aeronautics and Space Administration Asteroid Redirect Mission (ARM) Update to the Small Bodies Assessment Group Michele Gates, Program Director, ARM Dan Mazanek, Mission Investigator, ARM June
National Aeronautics and Space Administration Asteroid Redirect Mission (ARM) Update to the Small Bodies Assessment Group Michele Gates, Program Director, ARM Dan Mazanek, Mission Investigator, ARM June
CS 380: ARTIFICIAL INTELLIGENCE
 CS 380: ARTIFICIAL INTELLIGENCE INTRODUCTION 9/23/2013 Santiago Ontañón santi@cs.drexel.edu https://www.cs.drexel.edu/~santi/teaching/2013/cs380/intro.html CS 380 Focus: Introduction to AI: basic concepts
CS 380: ARTIFICIAL INTELLIGENCE INTRODUCTION 9/23/2013 Santiago Ontañón santi@cs.drexel.edu https://www.cs.drexel.edu/~santi/teaching/2013/cs380/intro.html CS 380 Focus: Introduction to AI: basic concepts
ASSEMBLY AND SERVICING OF SPACE TELESCOPES
 ASSEMBLY AND SERVICING OF SPACE TELESCOPES NASA MIRROR TECH DAYS 2017 HAWTHORNE, CALIFORNIA 16 NOVEMBER 2017 REVIRESCO LLC howard.macewen@hmacewen.com 1 The Astrophysics Advisory Council (APAC) also recognizes
ASSEMBLY AND SERVICING OF SPACE TELESCOPES NASA MIRROR TECH DAYS 2017 HAWTHORNE, CALIFORNIA 16 NOVEMBER 2017 REVIRESCO LLC howard.macewen@hmacewen.com 1 The Astrophysics Advisory Council (APAC) also recognizes
Italian Space Agency perspective on Small Satellites
 Italian Space Agency perspective on Small Satellites Agenzia Spaziale Italiana (ASI) CIRA 10 February 2016 Technology and Engineering Division G. Varacalli Outline National and global scenario Challenges
Italian Space Agency perspective on Small Satellites Agenzia Spaziale Italiana (ASI) CIRA 10 February 2016 Technology and Engineering Division G. Varacalli Outline National and global scenario Challenges
Agents in the Real World Agents and Knowledge Representation and Reasoning
 Agents in the Real World Agents and Knowledge Representation and Reasoning An Introduction Mitsubishi Concordia, Java-based mobile agent system. http://www.merl.com/projects/concordia Copernic Agents for
Agents in the Real World Agents and Knowledge Representation and Reasoning An Introduction Mitsubishi Concordia, Java-based mobile agent system. http://www.merl.com/projects/concordia Copernic Agents for
Investigating Model-Based Autonomy for Solar Probe Plus.
 Investigating Model-Based Autonomy for Solar Probe Plus. Workshop on Spacecraft Flight Software. December, 2013. Bill Van Besien Flight Software Engineer (Notice: This presentation does not contain export
Investigating Model-Based Autonomy for Solar Probe Plus. Workshop on Spacecraft Flight Software. December, 2013. Bill Van Besien Flight Software Engineer (Notice: This presentation does not contain export
BDI: Applications and Architectures
 BDI: Applications and Architectures Dr. Smitha Rao M.S, Jyothsna.A.N Department of Master of Computer Applications Reva Institute of Technology and Management Bangalore, India Abstract Today Agent Technology
BDI: Applications and Architectures Dr. Smitha Rao M.S, Jyothsna.A.N Department of Master of Computer Applications Reva Institute of Technology and Management Bangalore, India Abstract Today Agent Technology
The MARS Helicopter and Lessons for SATCOM Testing
 The MARS Helicopter and Lessons for SATCOM Testing Innovation: Kratos Defense Byline NASA engineers dreamed up an ingenious solution to this problem: pair the rover with a flying scout that can peer over
The MARS Helicopter and Lessons for SATCOM Testing Innovation: Kratos Defense Byline NASA engineers dreamed up an ingenious solution to this problem: pair the rover with a flying scout that can peer over
Multi-Agent Decentralized Planning for Adversarial Robotic Teams
 Multi-Agent Decentralized Planning for Adversarial Robotic Teams James Edmondson David Kyle Jason Blum Christopher Tomaszewski Cormac O Meadhra October 2016 Carnegie 26, 2016Mellon University 1 Copyright
Multi-Agent Decentralized Planning for Adversarial Robotic Teams James Edmondson David Kyle Jason Blum Christopher Tomaszewski Cormac O Meadhra October 2016 Carnegie 26, 2016Mellon University 1 Copyright
Overview of Recent Lunar Robotic Science and Exploration Studies at JPL
 ILEWG Sorrento, 2007 L. Alkalai - 1 Overview of Recent Lunar Robotic Science and Exploration Studies at JPL Leon Alkalai Robotic Lunar Exploration Program Office, Manager GRAIL, Proposal Manager Briefing
ILEWG Sorrento, 2007 L. Alkalai - 1 Overview of Recent Lunar Robotic Science and Exploration Studies at JPL Leon Alkalai Robotic Lunar Exploration Program Office, Manager GRAIL, Proposal Manager Briefing
Monday, October 29, 2018 Salvatori Seminar Room, South Mudd Building (3rd floor) - Caltech
 - Caltech") Large Constellations and Formations for Exploring Interstellar Objects and Long-Period Comets October 29 - November 2, 2018 Overview Schedule Monday, October 29, 2018 Salvatori Seminar Room, South Mudd
Large Constellations and Formations for Exploring Interstellar Objects and Long-Period Comets October 29 - November 2, 2018 Overview Schedule Monday, October 29, 2018 Salvatori Seminar Room, South Mudd
Ground Robotics Capability Conference and Exhibit. Mr. George Solhan Office of Naval Research Code March 2010
 Ground Robotics Capability Conference and Exhibit Mr. George Solhan Office of Naval Research Code 30 18 March 2010 1 S&T Focused on Naval Needs Broad FY10 DON S&T Funding = $1,824M Discovery & Invention
Ground Robotics Capability Conference and Exhibit Mr. George Solhan Office of Naval Research Code 30 18 March 2010 1 S&T Focused on Naval Needs Broad FY10 DON S&T Funding = $1,824M Discovery & Invention
SESAR EXPLORATORY RESEARCH. Dr. Stella Tkatchova 21/07/2015
 SESAR EXPLORATORY RESEARCH Dr. Stella Tkatchova 21/07/2015 1 Why SESAR? European ATM - Essential component in air transport system (worth 8.4 billion/year*) 2 FOUNDING MEMBERS Complex infrastructure =
SESAR EXPLORATORY RESEARCH Dr. Stella Tkatchova 21/07/2015 1 Why SESAR? European ATM - Essential component in air transport system (worth 8.4 billion/year*) 2 FOUNDING MEMBERS Complex infrastructure =
Here s some of what I wrote in 2013:
 Casey Dreier Director of Advocacy for The Planetary Society Here s some of what I wrote in 2013: Magazine articles Policy guides for Congress Investigative reporting TV & book reviews Blogs Talking Points
Casey Dreier Director of Advocacy for The Planetary Society Here s some of what I wrote in 2013: Magazine articles Policy guides for Congress Investigative reporting TV & book reviews Blogs Talking Points
Enterprise ISEA of the Future a Technology Vision for Fleet Support
 N A V S E A N WA VA SR EF A RWE A CR EF NA RT E R CS E N T E R S Enterprise ISEA of the Future a Technology Vision for Fleet Support Paul D. Mann, SES NSWC PHD Division Technical Director April 10, 2018
N A V S E A N WA VA SR EF A RWE A CR EF NA RT E R CS E N T E R S Enterprise ISEA of the Future a Technology Vision for Fleet Support Paul D. Mann, SES NSWC PHD Division Technical Director April 10, 2018
Lecture 13: Requirements Analysis
 Lecture 13: Requirements Analysis 2008 Steve Easterbrook. This presentation is available free for non-commercial use with attribution under a creative commons license. 1 Mars Polar Lander Launched 3 Jan
Lecture 13: Requirements Analysis 2008 Steve Easterbrook. This presentation is available free for non-commercial use with attribution under a creative commons license. 1 Mars Polar Lander Launched 3 Jan
NASA s Exploration Plans and The Lunar Architecture
 National Aeronautics and Space Administration NASA s Exploration Plans and The Lunar Architecture Dr. John Olson Exploration Systems Mission Directorate NASA Headquarters January 2009 The U.S. Space Exploration
National Aeronautics and Space Administration NASA s Exploration Plans and The Lunar Architecture Dr. John Olson Exploration Systems Mission Directorate NASA Headquarters January 2009 The U.S. Space Exploration
NASA Mission to MARS Program Innovative DC Microgrid Proof of Concept for Spacecraft
 NASA Mission to MARS Program Innovative DC Microgrid Proof of Concept for Spacecraft Bob Stuart Masoud Nazari i-pcgrid Conference San Francisco March 25, 2015 Space Grid Management for Human Deep Exploration
NASA Mission to MARS Program Innovative DC Microgrid Proof of Concept for Spacecraft Bob Stuart Masoud Nazari i-pcgrid Conference San Francisco March 25, 2015 Space Grid Management for Human Deep Exploration
What is Artificial Intelligence? Alternate Definitions (Russell + Norvig) Human intelligence
 Human intelligence") CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
National Aeronautics and Space Administration
 National Aeronautics and Space Administration Overview of Current Advanced Mission Studies at JSC February 1, 2017 Joe Caram Exploration Mission Planning Office Exploration Integration and Science Directorate
National Aeronautics and Space Administration Overview of Current Advanced Mission Studies at JSC February 1, 2017 Joe Caram Exploration Mission Planning Office Exploration Integration and Science Directorate
CSE 473 Artificial Intelligence (AI)
") CSE 473 Artificial Intelligence (AI) Rajesh Rao (Instructor) Jennifer Hanson (TA) Evan Herbst (TA) http://www.cs.washington.edu/473 Based on slides by UW CSE AI faculty, Dan Klein, Stuart Russell, Andrew
CSE 473 Artificial Intelligence (AI) Rajesh Rao (Instructor) Jennifer Hanson (TA) Evan Herbst (TA) http://www.cs.washington.edu/473 Based on slides by UW CSE AI faculty, Dan Klein, Stuart Russell, Andrew
Demonstrating Robotic Autonomy in NASA s Intelligent Systems Project
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Demonstrating Robotic Autonomy in NASA
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Demonstrating Robotic Autonomy in NASA
Monday, October 29, 2018 Salvatori Seminar Room, South Mudd Building (3rd floor) - Caltech
 - Caltech") Large Constellations and Formations for Exploring Interstellar Objects and Long-Period Comets October 29 - November 2, 2018 Overview Schedule 8:15-8:45 8:45-9:00 Team Lead 9:00-9:45 Fantastic Targets and
Large Constellations and Formations for Exploring Interstellar Objects and Long-Period Comets October 29 - November 2, 2018 Overview Schedule 8:15-8:45 8:45-9:00 Team Lead 9:00-9:45 Fantastic Targets and
CISC 1600 Lecture 3.4 Agent-based programming
 CISC 1600 Lecture 3.4 Agent-based programming Topics: Agents and environments Rationality Performance, Environment, Actuators, Sensors Four basic types of agents Multi-agent systems NetLogo Agents interact
CISC 1600 Lecture 3.4 Agent-based programming Topics: Agents and environments Rationality Performance, Environment, Actuators, Sensors Four basic types of agents Multi-agent systems NetLogo Agents interact
Systems Engineering and Autonomy: Opportunities and Challenges
 Systems Engineering and Autonomy: Opportunities and Challenges Paul Nielsen Director and CEO Software Engineering Institute Carnegie Mellon University Pittsburgh, PA 15213 1 Why Increase Autonomy? Speed
Systems Engineering and Autonomy: Opportunities and Challenges Paul Nielsen Director and CEO Software Engineering Institute Carnegie Mellon University Pittsburgh, PA 15213 1 Why Increase Autonomy? Speed
Intro to Intelligent Robotics EXAM Spring 2008, Page 1 of 9
 Intro to Intelligent Robotics EXAM Spring 2008, Page 1 of 9 Student Name: Student ID # UOSA Statement of Academic Integrity On my honor I affirm that I have neither given nor received inappropriate aid
Intro to Intelligent Robotics EXAM Spring 2008, Page 1 of 9 Student Name: Student ID # UOSA Statement of Academic Integrity On my honor I affirm that I have neither given nor received inappropriate aid
Developing a Computer Vision System for Autonomous Rover Navigation
 University of Hawaii at Hilo Fall 2016 Developing a Computer Vision System for Autonomous Rover Navigation ASTR 432 FINAL REPORT FALL 2016 DARYL ALBANO Page 1 of 6 Table of Contents Abstract... 2 Introduction...
University of Hawaii at Hilo Fall 2016 Developing a Computer Vision System for Autonomous Rover Navigation ASTR 432 FINAL REPORT FALL 2016 DARYL ALBANO Page 1 of 6 Table of Contents Abstract... 2 Introduction...
Space Challenges Preparing the next generation of explorers. The Program
 Space Challenges Preparing the next generation of explorers Space Challenges is one of the biggest educational programs in the field of space science and high technologies in Europe - http://spaceedu.net
Space Challenges Preparing the next generation of explorers Space Challenges is one of the biggest educational programs in the field of space science and high technologies in Europe - http://spaceedu.net
National Aeronautics and Space Administration Jet Propulsion Laboratory California Institute of Technology
 QuikSCAT Mission Status QuikSCAT Follow-on Mission 2 QuikSCAT instrument and spacecraft are healthy, but aging June 19, 2009 will be the 10 year launch anniversary We ve had two significant anomalies during
QuikSCAT Mission Status QuikSCAT Follow-on Mission 2 QuikSCAT instrument and spacecraft are healthy, but aging June 19, 2009 will be the 10 year launch anniversary We ve had two significant anomalies during
Nazareth Rocketry Program Training Tomorrow s Aerospace Leaders! e-magazine
 Nazareth Rocketry Program Training Tomorrow s Aerospace Leaders! e-magazine High resolution LRO photo of Earth rising over the Moon in December, 2015. The photo evokes memories of the famous Blue Marble
Nazareth Rocketry Program Training Tomorrow s Aerospace Leaders! e-magazine High resolution LRO photo of Earth rising over the Moon in December, 2015. The photo evokes memories of the famous Blue Marble
Outline. What is AI? A brief history of AI State of the art
 Introduction to AI Outline What is AI? A brief history of AI State of the art What is AI? AI is a branch of CS with connections to psychology, linguistics, economics, Goal make artificial systems solve
Introduction to AI Outline What is AI? A brief history of AI State of the art What is AI? AI is a branch of CS with connections to psychology, linguistics, economics, Goal make artificial systems solve
Artificial Intelligence for Engineers. EE 562 Winter 2015
 Artificial Intelligence for Engineers EE 562 Winter 2015 1 Administrative Details Instructor: Linda Shapiro, 634 CSE, shapiro@cs.washington.edu TA: ½ time Bilge Soran, bilge@cs.washington.edu Course Home
Artificial Intelligence for Engineers EE 562 Winter 2015 1 Administrative Details Instructor: Linda Shapiro, 634 CSE, shapiro@cs.washington.edu TA: ½ time Bilge Soran, bilge@cs.washington.edu Course Home
Status of the European Robotic Arm Project and Other Activities of the Robotics Office of ESA's ISS Programme
 Status of the European Robotic Arm Project and Other Activities of the Robotics Office of ESA's ISS Programme Philippe Schoonejans Head, ERA and Robotic Projects Office ESA directorate of Human Spaceflight
Status of the European Robotic Arm Project and Other Activities of the Robotics Office of ESA's ISS Programme Philippe Schoonejans Head, ERA and Robotic Projects Office ESA directorate of Human Spaceflight
Uranus Exploration Challenges
 Uranus Exploration Challenges Steve Matousek Workshop on the Study of Icy Giant Planet (2014) July 30, 2014 (c) 2014 California Institute of Technology. Government sponsorship acknowledged. JPL URS clearance
Uranus Exploration Challenges Steve Matousek Workshop on the Study of Icy Giant Planet (2014) July 30, 2014 (c) 2014 California Institute of Technology. Government sponsorship acknowledged. JPL URS clearance