Low cost microscope automation hardware and embedded software development. J. Ramirez A. Villa M. Toscani
|
|
|
- Marianna Tate
- 6 years ago
- Views:
Transcription
1 Low cost microscope automation hardware and embedded software development. J. Ramirez A. Villa M. Toscani
2 Introduction What Is this presentation about: Provide a general approach for open automation of optical microscopes. Low cost hardware and open source software. Emphasizing on lowest effort of building and operation.

3 Introduction Resources: Actuators Microcontrollers Sensors

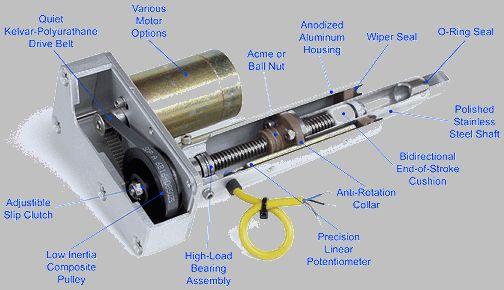
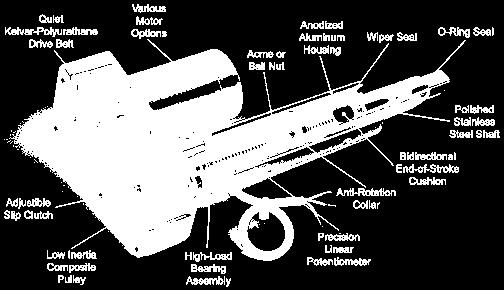
4 Introduction What is an Actuator? It is a device capable of performing a movement or a mechanical action over another hardware.

5 Introduction What is a Microcontroller? In the most simplified form, it is a whole computer inside of a microchip.

6 Introduction What is a Sensor? Is a device that allows us to measure real world magnitudes by converting them into an electrical signal.

7 The problem My microscope is perfect without motors. Why are you doing this? Manufacturers and their secrets. Not easily adaptable nor modifiable. Software is closed source. (other functions can be added (of course, if the price is right )
8 The problem Why is a good idea to have open motorized microscopes? Repetitive Instrument tasks Isolation Remote operation peculiar additions tend to be frowned upon. Standard set of hardware

9 The problem Do I need a motorized microscope? Non functional requirements Functional requirements

10 The problem
11 The problem How to face the need of solutions Time-of-building vs deadlines. Time-of-building vs scientific production increase.
12 The problem Ok now it has motors. How is it going to be a better tool for me? Better than commercial Remote operation Full device automation Optimizable for specific app. Complete experiment automation.
13 The problem Do I need a Mechanical engineer with knowledge in optics and buy a specialized PLC? No. Just basic knowledge of gluing some parts together. The PLC would be built.

14 Some examples

15 Some examples



16 Some examples



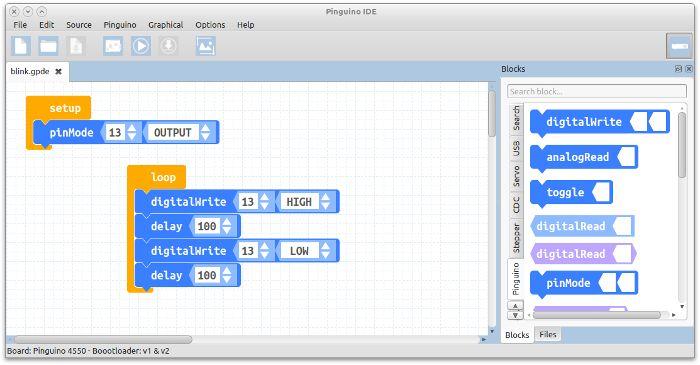
17 The Solution Hardware & Software Arduino & Pinguino
18 The Solution g-controller/


19 The Solution Why Arduino & Pinguino?


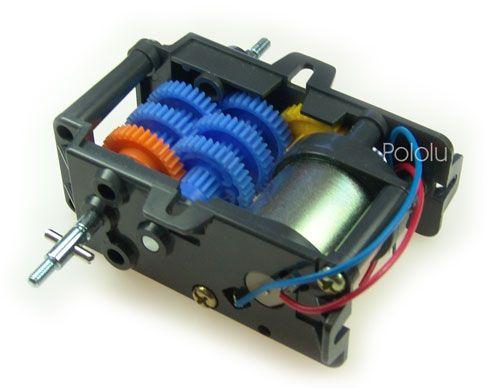
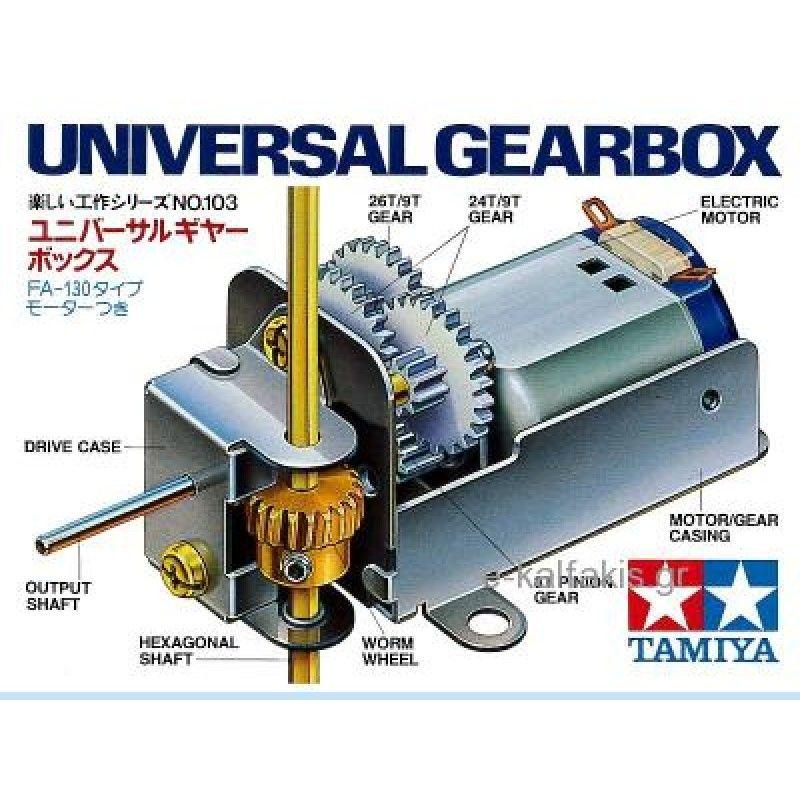
20 The Solution Hardware & Software Commercial gearboxes



21 The Solution Hardware & Software RC and robotics servos



22 The Solution Hardware & Software Sensors (from old equipment like printers...?)

23 What about integration?
24 Embedded Software Development Divide and conquer Split the processes in: Functions Functions Actions Stick the hardware to the microscope Hardware Control method for the hardware
25 Example of Software Development Functional requirement: sample plate end stop detection. Is an optical switch sufficient: yes (on or off). Possible states: 2 (on or off). How many inputs do I need: 2 (up-down). How to present the data: LCD, or image acquisition PC. This action can block (by software) the corresponding motor to protect our microscope.
26 How to program Graphical programming. Free control libraries. Students. Mature software.
27 An application case Arduino based laser microlithography platform using low cost hardware.with G code implementation (on development).

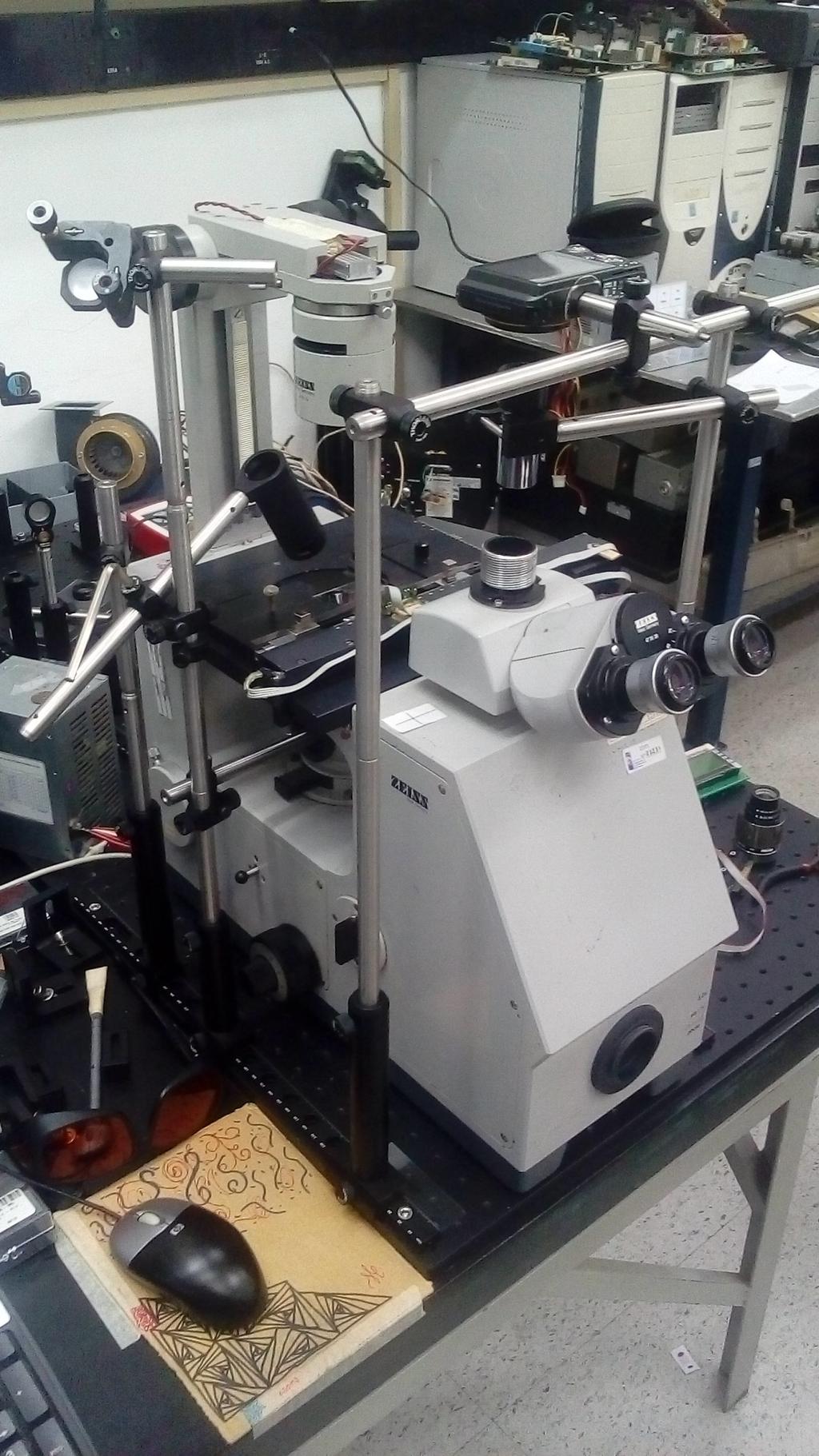
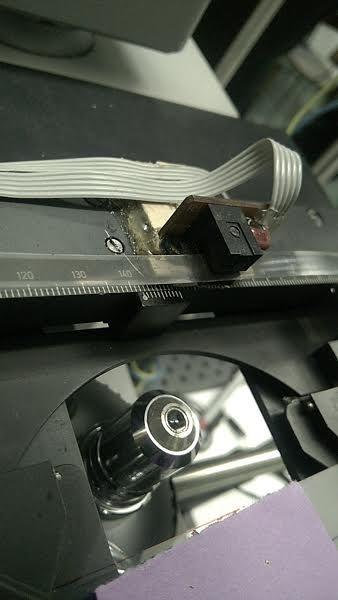
28 Arduino Laser Microlithography platform Old microscope: Zeiss IM35 circa Arduino Mega. Two LCD screens Development PC Laser and focusing hardware. Two motor gearbox and sensors.


29 Arduino Laser Microlithography platform

30 Arduino Laser Microlithography platform

31 Controller Unit
32 Project Evolution 1. Local heating of a sample by means of a focused laser. 2. The team needed a motorized stage. 3. The system was converted for lithography. 4. The system is going to be used for single cell fluorescence. Is capable of cutting carbon nanotube fabric electrodes.
33 Results and comparison The system developed performed enough well to be considered a candidate to start the development of an open source automated patch-clamp system. Tolerance raw data, repetitivity and absolute displacement among coordinates proximately available on request.

34 Some examples Rylee Isitt stacking with arduino ca/articles/building-a -focus-stacking-cont roller/

35 Some examples Rylee Isitt stacking with arduino ca/articles/building-a -focus-stacking-cont roller/

36 Some examples 3D Printed microscope, semi automatic. bles.com/id/low-cos t-digital-microscopewith-automated-slide -m/

37 Some examples A portable low-cost long-term live-cell imaging platform for biomedical research and education
38 Disadvantages Slow evolution. One-of-a-kind parts. Software integration difficult (to commercial). Multi language programming environments. Time of development. Device duplication.

39 Conclusions Learning opportunities. Better, faster research by less money. Support and collaboration from communities
40 Useful Resources Low cost Microscope Automation components: Make your own automated microscopy system: 0your%20own%20automated%20microscope.pdf A portable low-cost long-term live-cell imaging platform for biomedical research and education
41 Thank you for your attention. Questions Computer is not a device anymore, is an extension of your mind, and a gateway to other people - Mark Shuttleworth.
Total Hours Registration through Website or for further details please visit (Refer Upcoming Events Section)
") Total Hours 110-150 Registration Q R Code Registration through Website or for further details please visit http://www.rknec.edu/ (Refer Upcoming Events Section) Module 1: Basics of Microprocessor & Microcontroller
Total Hours 110-150 Registration Q R Code Registration through Website or for further details please visit http://www.rknec.edu/ (Refer Upcoming Events Section) Module 1: Basics of Microprocessor & Microcontroller
MECHATRONICS IN A BOX
 MECHATRONICS IN A BOX A Complete Mechatronics Solution for the Classroom amtekcompany.com Contents Introduction Programming Arduino microcontrollers Motor Control Training Course Flowcode 8 Formula AllCode
MECHATRONICS IN A BOX A Complete Mechatronics Solution for the Classroom amtekcompany.com Contents Introduction Programming Arduino microcontrollers Motor Control Training Course Flowcode 8 Formula AllCode
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE. Imagine Your Business...better. Automate Virtually Anything jhfoster.
 John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
Robotic Navigation Distance Control Platform
 Robotic Navigation Distance Control Platform System Block Diagram Student: Scott Sendra Project Advisors: Dr. Schertz Dr. Malinowski Date: November 18, 2003 Objective The objective of the Robotic Navigation
Robotic Navigation Distance Control Platform System Block Diagram Student: Scott Sendra Project Advisors: Dr. Schertz Dr. Malinowski Date: November 18, 2003 Objective The objective of the Robotic Navigation
Industrial Automation Training Academy. Arduino, LabVIEW & PLC Training Programs Duration: 6 Months (180 ~ 240 Hours)
") nfi Industrial Automation Training Academy Presents Arduino, LabVIEW & PLC Training Programs Duration: 6 Months (180 ~ 240 Hours) For: Electronics & Communication Engineering Electrical Engineering Instrumentation
nfi Industrial Automation Training Academy Presents Arduino, LabVIEW & PLC Training Programs Duration: 6 Months (180 ~ 240 Hours) For: Electronics & Communication Engineering Electrical Engineering Instrumentation
IOT Question Bank. Unit 1. Chapter 1
 IOT Question Bank Unit 1 Chapter 1 THE INTERNET OF THINGS: AN OVERVIEW 1) What are the flavours of the Internet of Things? 2) Write an equation of the Internet of Things. And explain the purpose of IOT.
IOT Question Bank Unit 1 Chapter 1 THE INTERNET OF THINGS: AN OVERVIEW 1) What are the flavours of the Internet of Things? 2) Write an equation of the Internet of Things. And explain the purpose of IOT.
Job Sheet 2 Servo Control
 Job Sheet 2 Servo Control Electrical actuators are replacing hydraulic actuators in many industrial applications. Electric servomotors and linear actuators can perform many of the same physical displacement
Job Sheet 2 Servo Control Electrical actuators are replacing hydraulic actuators in many industrial applications. Electric servomotors and linear actuators can perform many of the same physical displacement
How To Create The Right Collaborative System For Your Application. Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation
 How To Create The Right Collaborative System For Your Application Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation C Definitions Cobot: for this presentation a robot specifically designed
How To Create The Right Collaborative System For Your Application Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation C Definitions Cobot: for this presentation a robot specifically designed
DC Motor and Servo motor Control with ARM and Arduino. Created by:
 DC Motor and Servo motor Control with ARM and Arduino Created by: Andrew Kaler (39345) Tucker Boyd (46434) Mohammed Chowdhury (860822) Tazwar Muttaqi (901700) Mark Murdock (98071) May 4th, 2017 Objective
DC Motor and Servo motor Control with ARM and Arduino Created by: Andrew Kaler (39345) Tucker Boyd (46434) Mohammed Chowdhury (860822) Tazwar Muttaqi (901700) Mark Murdock (98071) May 4th, 2017 Objective
Mechatronics. STEAM Clown Production. STEAM Clown & Productions Copyright 2016 STEAM Clown
 Mechatronics Production Page 1 - Mechatronics SVCTE Mechatronics Class Class Production Ready To Hear about Mechatronics? Mecha = Mechanical Engineering Design Tronincs = Electrical Engineering Design
Mechatronics Production Page 1 - Mechatronics SVCTE Mechatronics Class Class Production Ready To Hear about Mechatronics? Mecha = Mechanical Engineering Design Tronincs = Electrical Engineering Design
Own Your Technology Presents Workshop on
 Own Your Technology Presents Workshop on PCB Designing ------------OUR FORTE------------ AERO MODELLING INTERNET OF THINGS EMBEDDED SYSTEMS ROBOTICS MATLAB & MACHINE VISION VLSI & VHDL ANDRIOD APP DEVELOPMENT
Own Your Technology Presents Workshop on PCB Designing ------------OUR FORTE------------ AERO MODELLING INTERNET OF THINGS EMBEDDED SYSTEMS ROBOTICS MATLAB & MACHINE VISION VLSI & VHDL ANDRIOD APP DEVELOPMENT
PC s and Micro-Controllers in Mechatronics Education. Santosh Devasia and Sanford Meek
 PC s and Micro-Controllers in Mechatronics Education Santosh Devasia and Sanford Meek Department of Mechanical Engineering The University of Utah Salt Lake City, Utah 84112 Abstract The mechanical engineering
PC s and Micro-Controllers in Mechatronics Education Santosh Devasia and Sanford Meek Department of Mechanical Engineering The University of Utah Salt Lake City, Utah 84112 Abstract The mechanical engineering
ROBOTICS & IOT. Workshop Module
 ROBOTICS & IOT Workshop Module CURRICULUM STRUCTURE DURATION : 2 day (16 hours) Session 1 Let's Learn Embedded System & Robotics Description Under this topic, we will discuss basics and give brief idea
ROBOTICS & IOT Workshop Module CURRICULUM STRUCTURE DURATION : 2 day (16 hours) Session 1 Let's Learn Embedded System & Robotics Description Under this topic, we will discuss basics and give brief idea
ROBOTICS & IOT. Workshop Module
 ROBOTICS & IOT Workshop Module CURRICULUM STRUCTURE DURATION : 2 day (16 hours) Session 1 Let's Learn Embedded System & Robotics Description Under this topic, we will discuss basics and give brief idea
ROBOTICS & IOT Workshop Module CURRICULUM STRUCTURE DURATION : 2 day (16 hours) Session 1 Let's Learn Embedded System & Robotics Description Under this topic, we will discuss basics and give brief idea
Linear vs. PWM/ Digital Drives
 APPLICATION NOTE 125 Linear vs. PWM/ Digital Drives INTRODUCTION Selecting the correct drive technology can be a confusing process. Understanding the difference between linear (Class AB) type drives and
APPLICATION NOTE 125 Linear vs. PWM/ Digital Drives INTRODUCTION Selecting the correct drive technology can be a confusing process. Understanding the difference between linear (Class AB) type drives and
ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything
 John Henry Foster ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 At John Henry Foster, we re devoted to bringing safe, flexible,
John Henry Foster ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 At John Henry Foster, we re devoted to bringing safe, flexible,
Categories of Robots and their Hardware Components. Click to add Text Martin Jagersand
 Categories of Robots and their Hardware Components Click to add Text Martin Jagersand Click to add Text Robot? Click to add Text Robot? How do we categorize these robots? What they can do? Most robots
Categories of Robots and their Hardware Components Click to add Text Martin Jagersand Click to add Text Robot? Click to add Text Robot? How do we categorize these robots? What they can do? Most robots
Introduction to Programming. June 4 June 8, and July 9 July 13 Mo-Fr., 8:30AM - 3:30PM
 Introduction to Programming June 4 June 8, and July 9 July 13 This hands-on training will teach basics of computer programming. Campers will learn how computers work, how to control devices and components
Introduction to Programming June 4 June 8, and July 9 July 13 This hands-on training will teach basics of computer programming. Campers will learn how computers work, how to control devices and components
Optical Microscope. Active anti-vibration table. Mechanical Head. Computer and Software. Acoustic/Electrical Shield Enclosure
 Optical Microscope On-axis optical view with max. X magnification Motorized zoom and focus Max Field of view: mm x mm (depends on zoom) Resolution : um Working Distance : mm Magnification : max. X Zoom
Optical Microscope On-axis optical view with max. X magnification Motorized zoom and focus Max Field of view: mm x mm (depends on zoom) Resolution : um Working Distance : mm Magnification : max. X Zoom
Electronic Design of a Semi-Automated Micromanipulator Cell Injection System
 Electronic Design of a Semi-Automated Micromanipulator Cell Injection System Asad Hameed 1, Nabeel Kamal 1, Saad Qaiser 1, Osman Hasan 1, Nasir Jalal 2 1 National University of Sciences and Technology
Electronic Design of a Semi-Automated Micromanipulator Cell Injection System Asad Hameed 1, Nabeel Kamal 1, Saad Qaiser 1, Osman Hasan 1, Nasir Jalal 2 1 National University of Sciences and Technology
Evolutionary robotics Jørgen Nordmoen
 INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
INF3480 Evolutionary robotics Jørgen Nordmoen Slides: Kyrre Glette Today: Evolutionary robotics Why evolutionary robotics Basics of evolutionary optimization INF3490 will discuss algorithms in detail Illustrating
Zeiss 780 Training Notes
 Zeiss 780 Training Notes Turn on Main Switch, System PC and Components Switches 780 Start up sequence Do you need the argon laser (458, 488, 514 nm lines)? Yes Turn on the laser s main power switch and
Zeiss 780 Training Notes Turn on Main Switch, System PC and Components Switches 780 Start up sequence Do you need the argon laser (458, 488, 514 nm lines)? Yes Turn on the laser s main power switch and
Practical work no. 3: Confocal Live Cell Microscopy
 Practical work no. 3: Confocal Live Cell Microscopy Course Instructor: Mikko Liljeström (MIU) 1 Background Confocal microscopy: The main idea behind confocality is that it suppresses the signal outside
Practical work no. 3: Confocal Live Cell Microscopy Course Instructor: Mikko Liljeström (MIU) 1 Background Confocal microscopy: The main idea behind confocality is that it suppresses the signal outside
Prototype faster and create wirelessly connected interactive objects as easy as making websites
 PRESS RELEASE Prototype faster and create wirelessly connected interactive objects as easy as making websites FOR IMMEDIATE RELEASE September 14, 2014, Paris Contact: Sasa Klopanovic PR & Marketing sasa.klopanovic@we-io.net
PRESS RELEASE Prototype faster and create wirelessly connected interactive objects as easy as making websites FOR IMMEDIATE RELEASE September 14, 2014, Paris Contact: Sasa Klopanovic PR & Marketing sasa.klopanovic@we-io.net
Quanser Products and solutions
 Quanser Products and solutions with NI LabVIEW From Classic Control to Complex Mechatronic Systems Design www.quanser.com Your first choice for control systems experiments For twenty five years, institutions
Quanser Products and solutions with NI LabVIEW From Classic Control to Complex Mechatronic Systems Design www.quanser.com Your first choice for control systems experiments For twenty five years, institutions
Measuring systems for ironing rings and punches
 Measuring systems for ironing rings and punches Equipment and proven technology for precision tooling measurement in beverage can industry RINGMASTER THE MASTER TOOL FOR RING MEASURE MENT RINGMASTER provides
Measuring systems for ironing rings and punches Equipment and proven technology for precision tooling measurement in beverage can industry RINGMASTER THE MASTER TOOL FOR RING MEASURE MENT RINGMASTER provides
Generic Specifications for a. HOLZMA HPP 350 with Cadmatic 4.0
 Holzma s HPP 350 is a flexible saw center. This CNC controlled machine features fast, simple programming coupled with high operating speeds to meet today s varied production requirements. Designed for
Holzma s HPP 350 is a flexible saw center. This CNC controlled machine features fast, simple programming coupled with high operating speeds to meet today s varied production requirements. Designed for
09 August, 2014 Page 1
 AutoCAD Design of Avionics Stack Top Cover Plate 09 August, 2014 I ve settled on a hybrid method of designing and fabricating most of my sheet metal and milled components for my second Helicycle. I start
AutoCAD Design of Avionics Stack Top Cover Plate 09 August, 2014 I ve settled on a hybrid method of designing and fabricating most of my sheet metal and milled components for my second Helicycle. I start
Design and Fabrication of Automatic Wood Drilling Machine
 Design and Fabrication of Automatic Wood Drilling Machine Deepak Devasagayam #1 Anthony Ignatious #2, Jason Kalathingal *3, Joy Kakde #4, *5 Mechanical Engineering Department, Fr. C.R.I.T., Vashi. Navi
Design and Fabrication of Automatic Wood Drilling Machine Deepak Devasagayam #1 Anthony Ignatious #2, Jason Kalathingal *3, Joy Kakde #4, *5 Mechanical Engineering Department, Fr. C.R.I.T., Vashi. Navi
Chapter 7 Introduction to Instrumentation
 Chapter 7 Introduction to Instrumentation Control Automático 3º Curso. Ing. Industrial Escuela Técnica Superior de Ingenieros Universidad de Sevilla Summary Introduction Basic concepts Properties of measurement
Chapter 7 Introduction to Instrumentation Control Automático 3º Curso. Ing. Industrial Escuela Técnica Superior de Ingenieros Universidad de Sevilla Summary Introduction Basic concepts Properties of measurement
The Torxis Linear Servo meets the following environmental conditions:
 Page: 1 1. PRODUCT DESCRIPTION The Torxis Linear Servo is the second generation of linear servos provided by GearWurx. This product features internal position sensing, and closed loop position control.
Page: 1 1. PRODUCT DESCRIPTION The Torxis Linear Servo is the second generation of linear servos provided by GearWurx. This product features internal position sensing, and closed loop position control.
KINECT CONTROLLED HUMANOID AND HELICOPTER
 KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
SUMMER CAMPS School of Engineering. June 2-28 Mo. - Fr. 9AM - 3PM BASICS OF PROGRAMMING ROBOTICS BIOMEDICAL APPLICATIONS
 School of Engineering SUMMER CAMPS 2019 June 2-28 Mo. - Fr. 9AM - 3PM BASICS OF PROGRAMMING ROBOTICS BIOMEDICAL APPLICATIONS CAD DESIGN & 3D PRINTING 1075 13 th St. SouthsSuite 101sBirmingham, Alabamas35294-4440
School of Engineering SUMMER CAMPS 2019 June 2-28 Mo. - Fr. 9AM - 3PM BASICS OF PROGRAMMING ROBOTICS BIOMEDICAL APPLICATIONS CAD DESIGN & 3D PRINTING 1075 13 th St. SouthsSuite 101sBirmingham, Alabamas35294-4440
RF module and Sensing Workshop Proposal. Tachlog Pvt. Ltd.
 RF module and Sensing Workshop Proposal Tachlog Pvt. Ltd. ABOUT THIS DOCUMENT Purpose of this The Workshop proposal document, explains the syllabus, estimate, activity document and overview of the workshop
RF module and Sensing Workshop Proposal Tachlog Pvt. Ltd. ABOUT THIS DOCUMENT Purpose of this The Workshop proposal document, explains the syllabus, estimate, activity document and overview of the workshop
Illumination Correction tutorial
 Illumination Correction tutorial I. Introduction The Correct Illumination Calculate and Correct Illumination Apply modules are intended to compensate for the non uniformities in illumination often present
Illumination Correction tutorial I. Introduction The Correct Illumination Calculate and Correct Illumination Apply modules are intended to compensate for the non uniformities in illumination often present
Rapid Array Scanning with the MS2000 Stage
 Technical Note 124 August 2010 Applied Scientific Instrumentation 29391 W. Enid Rd. Eugene, OR 97402 Rapid Array Scanning with the MS2000 Stage Introduction A common problem for automated microscopy is
Technical Note 124 August 2010 Applied Scientific Instrumentation 29391 W. Enid Rd. Eugene, OR 97402 Rapid Array Scanning with the MS2000 Stage Introduction A common problem for automated microscopy is
ROBOTICS & EMBEDDED SYSTEMS
 ROBOTICS & EMBEDDED SYSTEMS By, DON DOMINIC 29 S3 ECE CET EMBEDDED SYSTEMS small scale computers perform a specific task single component(hardware + software)- embedded after design, incapable of changing
ROBOTICS & EMBEDDED SYSTEMS By, DON DOMINIC 29 S3 ECE CET EMBEDDED SYSTEMS small scale computers perform a specific task single component(hardware + software)- embedded after design, incapable of changing
Energy & Space. International Presentations
 Energy & Space International Presentations 2012-2013 Advanced Electronics 3D Printed Circuit Boards 3D Printed Circuit Boards for Solder-Free Printable Electronics 4x4 Vehicles Arduino WiFi Android Controllers
Energy & Space International Presentations 2012-2013 Advanced Electronics 3D Printed Circuit Boards 3D Printed Circuit Boards for Solder-Free Printable Electronics 4x4 Vehicles Arduino WiFi Android Controllers
BUILD AN ARDUINO 101 DATA LOGGER WITH THE TI SENSORTAG
 page 1 / 5 page 2 / 5 build an arduino 101 pdf Arduino is a simple microcontroller board and open source development environment that allows you to make computers that drive both functional and creative
page 1 / 5 page 2 / 5 build an arduino 101 pdf Arduino is a simple microcontroller board and open source development environment that allows you to make computers that drive both functional and creative
Servos A Brief Guide
 Servos A Brief Guide David Sanderson, MEng (hons) DIS, CEng MIMarEST Technical Director at Kitronik Radio Control (RC) Servos are a simple way to provide electronically controlled movement for many projects.
Servos A Brief Guide David Sanderson, MEng (hons) DIS, CEng MIMarEST Technical Director at Kitronik Radio Control (RC) Servos are a simple way to provide electronically controlled movement for many projects.
CFIM MICROSCOPY COURSE PROGRAMME PRINCIPLES OF MICROSCOPY CONFOCAL AND FLUORESCENCE MICROSCOPY
 CFIM MICROSCOPY COURSE PROGRAMME PRINCIPLES OF MICROSCOPY 11.01.16-15.01.2016 CONFOCAL AND FLUORESCENCE MICROSCOPY 25.01.16-29.01.2016 PhD Course - University of Copenhagen Department of Biomedical Sciences
CFIM MICROSCOPY COURSE PROGRAMME PRINCIPLES OF MICROSCOPY 11.01.16-15.01.2016 CONFOCAL AND FLUORESCENCE MICROSCOPY 25.01.16-29.01.2016 PhD Course - University of Copenhagen Department of Biomedical Sciences
Smart-M3-Based Robot Interaction in Cyber-Physical Systems
 FRUCT 16, Oulu, Finland October 30, 2014 Smart-M3-Based Robot Interaction in Cyber-Physical Systems Nikolay Teslya *, Sergey Savosin * * St. Petersburg Institute for Informatics and Automation of the Russian
FRUCT 16, Oulu, Finland October 30, 2014 Smart-M3-Based Robot Interaction in Cyber-Physical Systems Nikolay Teslya *, Sergey Savosin * * St. Petersburg Institute for Informatics and Automation of the Russian
THE IMPORTANCE OF PLANNING AND DRAWING IN DESIGN
 PROGRAM OF STUDY ENGR.ROB Standard 1 Essential UNDERSTAND THE IMPORTANCE OF PLANNING AND DRAWING IN DESIGN The student will understand and implement the use of hand sketches and computer-aided drawing
PROGRAM OF STUDY ENGR.ROB Standard 1 Essential UNDERSTAND THE IMPORTANCE OF PLANNING AND DRAWING IN DESIGN The student will understand and implement the use of hand sketches and computer-aided drawing
Focus Strategies with ZEN2. Sven Terclavers ZEISS Embedded 3D Imaging Specialist Harvard University,
 Focus Strategies with ZEN2 Sven Terclavers ZEISS Embedded 3D Imaging Specialist Harvard University, ZEN Focus Strategies Focus Maintenance Software Autofocus (SWAF) Hardware: Definite focus (DF) Focus
Focus Strategies with ZEN2 Sven Terclavers ZEISS Embedded 3D Imaging Specialist Harvard University, ZEN Focus Strategies Focus Maintenance Software Autofocus (SWAF) Hardware: Definite focus (DF) Focus
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery
 Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Applying Automated Optical Inspection Ben Dawson, DALSA Coreco Inc., ipd Group (987)
") Applying Automated Optical Inspection Ben Dawson, DALSA Coreco Inc., ipd Group bdawson@goipd.com (987) 670-2050 Introduction Automated Optical Inspection (AOI) uses lighting, cameras, and vision computers
Applying Automated Optical Inspection Ben Dawson, DALSA Coreco Inc., ipd Group bdawson@goipd.com (987) 670-2050 Introduction Automated Optical Inspection (AOI) uses lighting, cameras, and vision computers
Project Name: SpyBot
 EEL 4924 Electrical Engineering Design (Senior Design) Final Report April 23, 2013 Project Name: SpyBot Team Members: Name: Josh Kurland Name: Parker Karaus Email: joshkrlnd@gmail.com Email: pbkaraus@ufl.edu
EEL 4924 Electrical Engineering Design (Senior Design) Final Report April 23, 2013 Project Name: SpyBot Team Members: Name: Josh Kurland Name: Parker Karaus Email: joshkrlnd@gmail.com Email: pbkaraus@ufl.edu
Dispenser printed proximity sensor on fabric for creative smart fabric applications
 Dispenser printed proximity sensor on fabric for creative smart fabric applications Yang Wei, Russel Torah, Yi Li and John Tudor University of Southampton, Southampton, United Kingdom, SO17 3BJ Tel: +44(0)23
Dispenser printed proximity sensor on fabric for creative smart fabric applications Yang Wei, Russel Torah, Yi Li and John Tudor University of Southampton, Southampton, United Kingdom, SO17 3BJ Tel: +44(0)23
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Optimized testing of electric drives
 Measuring and analyzing of electrical machines testing by HBM Optimized testing of electric drives Weaknesses of the current approach Facing challenges: with the standard method? Improving the efficiency
Measuring and analyzing of electrical machines testing by HBM Optimized testing of electric drives Weaknesses of the current approach Facing challenges: with the standard method? Improving the efficiency
A Brief Description of the Testing Station in Festo Modular Production System (MPS)
") A Brief Description of the Testing Station in Festo Modular Production System (MPS) Figure 1 Distribution station (left) and testing station (right) 1 Introduction The purpose of this document is to describe
A Brief Description of the Testing Station in Festo Modular Production System (MPS) Figure 1 Distribution station (left) and testing station (right) 1 Introduction The purpose of this document is to describe
Introducing the Quadrotor Flying Robot
 Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
VOICE CONTROLLED ROBOT WITH REAL TIME BARRIER DETECTION AND AVERTING
 VOICE CONTROLLED ROBOT WITH REAL TIME BARRIER DETECTION AND AVERTING P.NARENDRA ILAYA PALLAVAN 1, S.HARISH 2, C.DHACHINAMOORTHI 3 1Assistant Professor, EIE Department, Bannari Amman Institute of Technology,
VOICE CONTROLLED ROBOT WITH REAL TIME BARRIER DETECTION AND AVERTING P.NARENDRA ILAYA PALLAVAN 1, S.HARISH 2, C.DHACHINAMOORTHI 3 1Assistant Professor, EIE Department, Bannari Amman Institute of Technology,
1 Chrono methods. The term Chrono methods includes all the measurements of electrochemical signals during a well-defined sequence of steps.
 Version 1.11.0 NOVA Chrono methods tutorial 1 Chrono methods The term Chrono methods includes all the measurements of electrochemical signals during a well-defined sequence of steps. In NOVA, time resolved
Version 1.11.0 NOVA Chrono methods tutorial 1 Chrono methods The term Chrono methods includes all the measurements of electrochemical signals during a well-defined sequence of steps. In NOVA, time resolved
Who we are. was born in 2006 as Spin-Off of Politecnico of Torino. Full time people employed 8. Laboratories and facilities 300 m 2
 Who we are was born in 2006 as Spin-Off of Politecnico of Torino Full time people employed 8 Laboratories and facilities 300 m 2 Administration and offices 250 m 2 Consolidated Turnover more then 600k
Who we are was born in 2006 as Spin-Off of Politecnico of Torino Full time people employed 8 Laboratories and facilities 300 m 2 Administration and offices 250 m 2 Consolidated Turnover more then 600k
V2018 SPINSTAND AND NEW SERVO-8 SYSTEM
 34 http://www.guzik.com/products/head-and-media-disk-drive-test/spinstands/ V2018 SPINSTAND AND NEW SERVO-8 SYSTEM Designed for Automated High-TPI HGA Volume Testing Up to 1300 ktpi Estimated Capability
34 http://www.guzik.com/products/head-and-media-disk-drive-test/spinstands/ V2018 SPINSTAND AND NEW SERVO-8 SYSTEM Designed for Automated High-TPI HGA Volume Testing Up to 1300 ktpi Estimated Capability
3. are adherent cells (ie. cells in suspension are too far away from the coverslip)
") Before you begin, make sure your sample... 1. is seeded on #1.5 coverglass (thickness = 0.17) 2. is an aqueous solution (ie. fixed samples mounted on a slide will not work - not enough difference in refractive
Before you begin, make sure your sample... 1. is seeded on #1.5 coverglass (thickness = 0.17) 2. is an aqueous solution (ie. fixed samples mounted on a slide will not work - not enough difference in refractive
OPTICS IN MOTION. Introduction: Competing Technologies: 1 of 6 3/18/2012 6:27 PM.
 1 of 6 3/18/2012 6:27 PM OPTICS IN MOTION STANDARD AND CUSTOM FAST STEERING MIRRORS Home Products Contact Tutorial Navigate Our Site 1) Laser Beam Stabilization to design and build a custom 3.5 x 5 inch,
1 of 6 3/18/2012 6:27 PM OPTICS IN MOTION STANDARD AND CUSTOM FAST STEERING MIRRORS Home Products Contact Tutorial Navigate Our Site 1) Laser Beam Stabilization to design and build a custom 3.5 x 5 inch,
FABO ACADEMY X ELECTRONIC DESIGN
 ELECTRONIC DESIGN MAKE A DEVICE WITH INPUT & OUTPUT The Shanghaino can be programmed to use many input and output devices (a motor, a light sensor, etc) uploading an instruction code (a program) to it
ELECTRONIC DESIGN MAKE A DEVICE WITH INPUT & OUTPUT The Shanghaino can be programmed to use many input and output devices (a motor, a light sensor, etc) uploading an instruction code (a program) to it
Embedded Robotics. Software Development & Education Center
 Software Development & Education Center Embedded Robotics Robotics Development with ARM µp INTRODUCTION TO ROBOTICS Types of robots Legged robots Mobile robots Autonomous robots Manual robots Robotic arm
Software Development & Education Center Embedded Robotics Robotics Development with ARM µp INTRODUCTION TO ROBOTICS Types of robots Legged robots Mobile robots Autonomous robots Manual robots Robotic arm
ELG3336 Design of Mechatronics System
 ELG3336 Design of Mechatronics System Elements of a Data Acquisition System 2 Analog Signal Data Acquisition Hardware Your Signal Data Acquisition DAQ Device System Computer Cable Terminal Block Data Acquisition
ELG3336 Design of Mechatronics System Elements of a Data Acquisition System 2 Analog Signal Data Acquisition Hardware Your Signal Data Acquisition DAQ Device System Computer Cable Terminal Block Data Acquisition
PillMaster. Jasmine Liu Jose Mendoza Chris Xiao Tony Lu Ritchie Kieu Daniel Lan. Main Organizer: Jasmine Liu
 [1] PillMaster Jasmine Liu Jose Mendoza Chris Xiao Tony Lu Ritchie Kieu Daniel Lan Main Organizer: Jasmine Liu Road Map * Introduction * Our Design * Our Team Responsibilities * High Level System Overview
[1] PillMaster Jasmine Liu Jose Mendoza Chris Xiao Tony Lu Ritchie Kieu Daniel Lan Main Organizer: Jasmine Liu Road Map * Introduction * Our Design * Our Team Responsibilities * High Level System Overview
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
EMBEDDED SYSTEMS AND KINETIC ART A NATURAL COLLABORATION. Erik Brunvand and Paul Stout. Kinetic art contains moving parts
 EMBEDDED SYSTEMS AND KINETIC ART A NATURAL COLLABORATION Erik Brunvand and Paul Stout Kinetic Art Kinetic art contains moving parts Depends on motion, sound, or light for its effect Kinetic aspect often
EMBEDDED SYSTEMS AND KINETIC ART A NATURAL COLLABORATION Erik Brunvand and Paul Stout Kinetic Art Kinetic art contains moving parts Depends on motion, sound, or light for its effect Kinetic aspect often
MOBILE ROBOT LOCALIZATION with POSITION CONTROL
 T.C. DOKUZ EYLÜL UNIVERSITY ENGINEERING FACULTY ELECTRICAL & ELECTRONICS ENGINEERING DEPARTMENT MOBILE ROBOT LOCALIZATION with POSITION CONTROL Project Report by Ayhan ŞAVKLIYILDIZ - 2011502093 Burcu YELİS
T.C. DOKUZ EYLÜL UNIVERSITY ENGINEERING FACULTY ELECTRICAL & ELECTRONICS ENGINEERING DEPARTMENT MOBILE ROBOT LOCALIZATION with POSITION CONTROL Project Report by Ayhan ŞAVKLIYILDIZ - 2011502093 Burcu YELİS
Matrix Screw Test Station. Team Synthes:
 Matrix Screw Test Station Team Synthes: Outline Introduction Sponsor Background Introduction to the Matrix Screw Assembly overview Our testing station Project scope, realization of wants and metrics Concept
Matrix Screw Test Station Team Synthes: Outline Introduction Sponsor Background Introduction to the Matrix Screw Assembly overview Our testing station Project scope, realization of wants and metrics Concept
Selecting Telecommunication Test Equipment To Maximize Throughput and Accuracy. By Robert Green Keithley Instruments, Inc.
 Selecting Telecommunication Test Equipment To Maximize Throughput and Accuracy By Robert Green Keithley Instruments, Inc. Soaring demand for cell phones, pagers mobile radios and base-stations, is putting
Selecting Telecommunication Test Equipment To Maximize Throughput and Accuracy By Robert Green Keithley Instruments, Inc. Soaring demand for cell phones, pagers mobile radios and base-stations, is putting
Megamark Arduino Library Documentation
 Megamark Arduino Library Documentation The Choitek Megamark is an advanced full-size multipurpose mobile manipulator robotics platform for students, artists, educators and researchers alike. In our mission
Megamark Arduino Library Documentation The Choitek Megamark is an advanced full-size multipurpose mobile manipulator robotics platform for students, artists, educators and researchers alike. In our mission
Andrew G. Bell July 28, 2016
 Using Arduino & LabView for Teaching MEMS Devices Andrew G. Bell July 28, 2016 Background Ivy Tech Community College is Indiana s largest public postsecondary institution and the nation s largest singly
Using Arduino & LabView for Teaching MEMS Devices Andrew G. Bell July 28, 2016 Background Ivy Tech Community College is Indiana s largest public postsecondary institution and the nation s largest singly
Supplementary materials for Tactile Feedback Display with Spatial and Temporal Resolutions
 Supplementary materials for Tactile Feedback Display with Spatial and Temporal Resolutions Siarhei Vishniakou,, Brian W. Lewis,, Xiaofan Niu, Alireza Kargar, Ke Sun, Michael Kalajian,, Namseok Park, Muchuan
Supplementary materials for Tactile Feedback Display with Spatial and Temporal Resolutions Siarhei Vishniakou,, Brian W. Lewis,, Xiaofan Niu, Alireza Kargar, Ke Sun, Michael Kalajian,, Namseok Park, Muchuan
Pick and Place Robotic Arm Using Arduino
 Pick and Place Robotic Arm Using Arduino Harish K 1, Megha D 2, Shuklambari M 3, Amit K 4, Chaitanya K Jambotkar 5 1,2,3,4 5 th SEM Students in Department of Electrical and Electronics Engineering, KLE.I.T,
Pick and Place Robotic Arm Using Arduino Harish K 1, Megha D 2, Shuklambari M 3, Amit K 4, Chaitanya K Jambotkar 5 1,2,3,4 5 th SEM Students in Department of Electrical and Electronics Engineering, KLE.I.T,
PROCEEDINGS OF SPIE. Development of activities to promote the interest in science and technology in elementary and middle school students
 PROCEEDINGS OF SPIE SPIEDigitalLibrary.org/conference-proceedings-of-spie Development of activities to promote the interest in science and technology in elementary and middle school students A. Sicardi-Segade,
PROCEEDINGS OF SPIE SPIEDigitalLibrary.org/conference-proceedings-of-spie Development of activities to promote the interest in science and technology in elementary and middle school students A. Sicardi-Segade,
RAPID PROTOTYPING AND EMBEDDED CONTROL FOR AN ANTHROPOMORPHIC ROBOTIC HAND
 The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania RAPID PROTOTYPING AND EMBEDDED CONTROL FOR AN ANTHROPOMORPHIC ROBOTIC
The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania RAPID PROTOTYPING AND EMBEDDED CONTROL FOR AN ANTHROPOMORPHIC ROBOTIC
EQ-ROBO Programming : bomb Remover Robot
 EQ-ROBO Programming : bomb Remover Robot Program begin Input port setting Output port setting LOOP starting point (Repeat the command) Condition 1 Key of remote controller : LEFT UP Robot go forwards after
EQ-ROBO Programming : bomb Remover Robot Program begin Input port setting Output port setting LOOP starting point (Repeat the command) Condition 1 Key of remote controller : LEFT UP Robot go forwards after
PRODUCTS AND LAB SOLUTIONS
 PRODUCTS AND LAB SOLUTIONS ENGINEERING FUNDAMENTALS NI ELVIS APPLICATION BOARDS Controls Board Energy Systems Board Mechatronic Systems Board with NI ELVIS III Mechatronic Sensors Board Mechatronic Actuators
PRODUCTS AND LAB SOLUTIONS ENGINEERING FUNDAMENTALS NI ELVIS APPLICATION BOARDS Controls Board Energy Systems Board Mechatronic Systems Board with NI ELVIS III Mechatronic Sensors Board Mechatronic Actuators
AVL X-ion. Adapts. Acquires. Inspires.
 AVL X-ion Adapts. Acquires. Inspires. THE CHALLENGE Facing ever more stringent emissions targets, the quest for an efficient and affordable powertrain leads invariably through complexity. On the one hand,
AVL X-ion Adapts. Acquires. Inspires. THE CHALLENGE Facing ever more stringent emissions targets, the quest for an efficient and affordable powertrain leads invariably through complexity. On the one hand,
Devastator Tank Mobile Platform with Edison SKU:ROB0125
 Devastator Tank Mobile Platform with Edison SKU:ROB0125 From Robot Wiki Contents 1 Introduction 2 Tutorial 2.1 Chapter 2: Run! Devastator! 2.2 Chapter 3: Expansion Modules 2.3 Chapter 4: Build The Devastator
Devastator Tank Mobile Platform with Edison SKU:ROB0125 From Robot Wiki Contents 1 Introduction 2 Tutorial 2.1 Chapter 2: Run! Devastator! 2.2 Chapter 3: Expansion Modules 2.3 Chapter 4: Build The Devastator
Space Research expeditions and open space work. Education & Research Teaching and laboratory facilities. Medical Assistance for people
 Space Research expeditions and open space work Education & Research Teaching and laboratory facilities. Medical Assistance for people Safety Life saving activity, guarding Military Use to execute missions
Space Research expeditions and open space work Education & Research Teaching and laboratory facilities. Medical Assistance for people Safety Life saving activity, guarding Military Use to execute missions
Ionscope SICM. About Ionscope. Scanning Ion Conductance Microscopy. Ionscope A brand of Openiolabs Limited
 SICM About is a brand of openiolabs Ltd, headquartered in Cambridge UK, is the world-leader in (SICM), a rapidly emerging Scanning Probe Microscopy (SPM) technique which allows nanoscale topographical
SICM About is a brand of openiolabs Ltd, headquartered in Cambridge UK, is the world-leader in (SICM), a rapidly emerging Scanning Probe Microscopy (SPM) technique which allows nanoscale topographical
Viper 2x35 Operating Modes
 SP ROBOTIC WORKS PVT. LTD. Viper 2x35 Operating Modes Contents 1. Operating Modes... 2 1.1 Input Modes... 2 1.1.1 R/C Transmitter Mode... 2 1.1.2 Microcontroller Mode... 3 1.2 Motor Control Modes... 3
SP ROBOTIC WORKS PVT. LTD. Viper 2x35 Operating Modes Contents 1. Operating Modes... 2 1.1 Input Modes... 2 1.1.1 R/C Transmitter Mode... 2 1.1.2 Microcontroller Mode... 3 1.2 Motor Control Modes... 3
Profiting with Wire EDM
 3 Profiting with Wire EDM Users of Wire EDM 55 Parts made with the wire EDM process are used for machining conductive materials for medicine, chemical, electronics, oil and gas, die and mold, fabrication,
3 Profiting with Wire EDM Users of Wire EDM 55 Parts made with the wire EDM process are used for machining conductive materials for medicine, chemical, electronics, oil and gas, die and mold, fabrication,
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization
 Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Introduction to Model-Based Design for Offshore and Marine applications C. Kleijn
 Introduction to Model-Based Design for Offshore and Marine applications C. Kleijn Model Based Design Contents Contents 1. Introduction 3 1.1. What is Model-Based Design 3 1.2. How is it used? 3 2. Benefits
Introduction to Model-Based Design for Offshore and Marine applications C. Kleijn Model Based Design Contents Contents 1. Introduction 3 1.1. What is Model-Based Design 3 1.2. How is it used? 3 2. Benefits
TTR2796. Fully Automated Three Phase 250V Transformer Turns Ratio Meter FEATURES AND BENEFITS APPLICATIONS
 TTR2796 Fully Automated Three Phase 250V Transformer Turns Ratio Meter A close collaboration with major transformer manufacturers has lead to the new HAEFELY HIPOTRONICS 2796 Transformer Turns Ratio Meter.
TTR2796 Fully Automated Three Phase 250V Transformer Turns Ratio Meter A close collaboration with major transformer manufacturers has lead to the new HAEFELY HIPOTRONICS 2796 Transformer Turns Ratio Meter.
Applications of Piezoelectric Actuator
 MAMIYA Yoichi Abstract The piezoelectric actuator is a device that features high displacement accuracy, high response speed and high force generation. It has mainly been applied in support of industrial
MAMIYA Yoichi Abstract The piezoelectric actuator is a device that features high displacement accuracy, high response speed and high force generation. It has mainly been applied in support of industrial
ULS24 Frequently Asked Questions
 List of Questions 1 1. What type of lens and filters are recommended for ULS24, where can we source these components?... 3 2. Are filters needed for fluorescence and chemiluminescence imaging, what types
List of Questions 1 1. What type of lens and filters are recommended for ULS24, where can we source these components?... 3 2. Are filters needed for fluorescence and chemiluminescence imaging, what types
3-Degrees of Freedom Robotic ARM Controller for Various Applications
 3-Degrees of Freedom Robotic ARM Controller for Various Applications Mohd.Maqsood Ali M.Tech Student Department of Electronics and Instrumentation Engineering, VNR Vignana Jyothi Institute of Engineering
3-Degrees of Freedom Robotic ARM Controller for Various Applications Mohd.Maqsood Ali M.Tech Student Department of Electronics and Instrumentation Engineering, VNR Vignana Jyothi Institute of Engineering
School of Engineering SUMMER CAMPS PROGRAMMING : STEP BY STEP ROBOTICS & BASICS OF PROGRAMMING. INTERNET OF THINGS IoT, SMARTPHONE APPLICATIONS
 School of Engineering SUMMER CAMPS 20 18 PROGRAMMING : STEP BY STEP June 4 - July 24 ROBOTICS & BASICS OF PROGRAMMING INTERNET OF THINGS IoT, SMARTPHONE APPLICATIONS PROGRAMMING & BIOMEDICAL APPLICATIONS
School of Engineering SUMMER CAMPS 20 18 PROGRAMMING : STEP BY STEP June 4 - July 24 ROBOTICS & BASICS OF PROGRAMMING INTERNET OF THINGS IoT, SMARTPHONE APPLICATIONS PROGRAMMING & BIOMEDICAL APPLICATIONS
Training Schedule. Robotic System Design using Arduino Platform
 Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
Python Programming For Arduino
 We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with python programming for
We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with python programming for
GetTutorialized Workshops Brochure-2017
 GetTutorialized Workshops Brochure-2017 Internet of Things with Arduino Workshop course Content: 1. Introduction to Internet of Things 2. Introduction to Microcontrollers and Microprocessors 3. Microcontrollers
GetTutorialized Workshops Brochure-2017 Internet of Things with Arduino Workshop course Content: 1. Introduction to Internet of Things 2. Introduction to Microcontrollers and Microprocessors 3. Microcontrollers
Lecture 2: Embedded Systems: An Introduction
 Design & Co-design of Embedded Systems Lecture 2: Embedded Systems: An Introduction Adapted from ECE456 course notes, University of California (Riverside), and EE412 course notes, Princeton University
Design & Co-design of Embedded Systems Lecture 2: Embedded Systems: An Introduction Adapted from ECE456 course notes, University of California (Riverside), and EE412 course notes, Princeton University
EE 314 Spring 2003 Microprocessor Systems
 EE 314 Spring 2003 Microprocessor Systems Laboratory Project #9 Closed Loop Control Overview and Introduction This project will bring together several pieces of software and draw on knowledge gained in
EE 314 Spring 2003 Microprocessor Systems Laboratory Project #9 Closed Loop Control Overview and Introduction This project will bring together several pieces of software and draw on knowledge gained in
Educational robotics critical for the future of Linux Jason Kridner, Sitara Applications, Texas Instruments Co-founder and board member,
 Educational robotics critical for the future of Linux Jason Kridner, Sitara Applications, Texas Instruments Co-founder and board member, BeagleBoard.org Foundation Abstract Jobs are being automated. Students
Educational robotics critical for the future of Linux Jason Kridner, Sitara Applications, Texas Instruments Co-founder and board member, BeagleBoard.org Foundation Abstract Jobs are being automated. Students
Presentation Temporary Presentation
 Presentation 2017 Temporary Presentation 2014 12.08.2014 1 Company structure Sales & production subsidiary USA Sales subsidiary Germany Headquarters & production site Worldwide representation Custom designed
Presentation 2017 Temporary Presentation 2014 12.08.2014 1 Company structure Sales & production subsidiary USA Sales subsidiary Germany Headquarters & production site Worldwide representation Custom designed
Fully automated three phase 250V Transformer Turns Ratio Meter
 TTR 2796 Fully automated three phase 250V Transformer Turns Ratio Meter FEATURES AND BENEFITS Fully automated measurement of turns ratio, voltage ratio, phase displacement, and excitation current. Better
TTR 2796 Fully automated three phase 250V Transformer Turns Ratio Meter FEATURES AND BENEFITS Fully automated measurement of turns ratio, voltage ratio, phase displacement, and excitation current. Better
Model-Based Design as an Enabler for Supply Chain Collaboration
 CO-DEVELOPMENT MANUFACTURING INNOVATION & SUPPORT Model-Based Design as an Enabler for Supply Chain Collaboration Richard Mijnheer, CEO, 3T Stephan van Beek, Technical Manager, MathWorks Richard Mijnheer
CO-DEVELOPMENT MANUFACTURING INNOVATION & SUPPORT Model-Based Design as an Enabler for Supply Chain Collaboration Richard Mijnheer, CEO, 3T Stephan van Beek, Technical Manager, MathWorks Richard Mijnheer
The Smart Factory Lab
 The Smart Factory Lab That Smart Factory lab is a cornerstone in the newly established Innovation lab at the Mads Clausen Institute at Alsion in Sønderborg. The Innovation Lab is a physical environment
The Smart Factory Lab That Smart Factory lab is a cornerstone in the newly established Innovation lab at the Mads Clausen Institute at Alsion in Sønderborg. The Innovation Lab is a physical environment
Introduction to Virtual Reality (based on a talk by Bill Mark)
") Introduction to Virtual Reality (based on a talk by Bill Mark) I will talk about... Why do we want Virtual Reality? What is needed for a VR system? Examples of VR systems Research problems in VR Most Computers
Introduction to Virtual Reality (based on a talk by Bill Mark) I will talk about... Why do we want Virtual Reality? What is needed for a VR system? Examples of VR systems Research problems in VR Most Computers
Semiconductor 9/21/2015
 Semiconductor Electronics 9/21/2015 Starting simple the diode. The diode is one of the simplest semiconductor devices. It is comprised of two layers of semiconductor. One is impregnated with an electron
Semiconductor Electronics 9/21/2015 Starting simple the diode. The diode is one of the simplest semiconductor devices. It is comprised of two layers of semiconductor. One is impregnated with an electron