3-Degrees of Freedom Robotic ARM Controller for Various Applications
|
|
|
- Dwayne Lang
- 5 years ago
- Views:
Transcription
1 3-Degrees of Freedom Robotic ARM Controller for Various Applications Mohd.Maqsood Ali M.Tech Student Department of Electronics and Instrumentation Engineering, VNR Vignana Jyothi Institute of Engineering and Technology. Abstract In this work, we have designed a 3-degree of freedom robotic arm controller for various applications. A general interface is developed for the robotic arm enabling it to communicate with different platforms and performing different tasks. The task is to design a robotic arm that can perform the necessary pick and place actions. The movements are controlled by using servo motor embedded in it. Deflection in the arm is identified using MEMS accelerometer sensor and a Flex sensor. The work is aiming to develop a robotic arm. The task entails analysis, design and fabrication of the robot. G. Vamsi Krishna Assistant Professor Department of Electronics and Instrumentation Engineering, VNR Vignana Jyothi Institute of Engineering and Technology. A 3-axis accelerometer was selected to be the input device of this system, capturing the human arm behaviour to control the robotic arm movement. A flex sensor & MEMS sensor were used to control gripper movement. When compared with other common input devices like teach pendant, this approach using accelerometers over wireless medium is easier to work. Block Diagram: The Primary Objectives of this work are Hand gesture tracking and reproducing with robotic arm. The robotic arm shall have at least 2 Degrees of Freedom (DOF). The robotic arm shall be able to pick up any small object. Keywords: MEMS sensor, FLEX sensor, Aurdino UNO, 3 DOF (Degrees of Freedom), Servo motors. Introduction: Growing demand for natural Human Machine Interfaces and robot easy programming platforms, to control an industrial robotic arm was proposed and implemented successfully. Fig: block diagram of robotic arm controller. The main blocks of this project are: ARDUINO IDE Page 227
2 POWER SUPPLY MEMS SENSOR FLEX SENSOR SERVOMOTOR MEMS sensor MMA 7260 Q: The MMA7260Q is 3-axis accelerometer. An accelerometer measures acceleration (change in speed) of anything that it's mounted on. Single axis accelerometers measure acceleration in only one direction. Dual-axis accelerometers are the most common measure acceleration in two directions, perpendicular to each other. Three-axis accelerometers measure acceleration in three directions. FLEX SENSOR: Flex sensor are sensors that change in resistance depending on the amount of bend on the sensor. They convert the change in bend to electrical resistance the more bend, the more the resistance value. Using this combination of sensors, a non-expert robot programmer can control a robot quickly and in a natural way. The low price and short set-up time are other advantages of this system. Servomotor: A servomotor is a rotary actuator that allows for precise control of angular position, velocity and acceleration. It consists of a suitable motor coupled to a sensor for position feedback. It also requires a relatively sophisticated controller, often a dedicated module designed specifically for use with servomotors. The motor is paired with some type of encoder to provide position and speed feedback. In the simplest case, only the position is measured. The measured position of the output is compared to the command position, the external input to the controller. If the output position differs from that required, an error signal is generated which then causes the motor to rotate in either direction, as needed to bring the output shaft to the appropriate position. As the positions approach, the error signal reduces to zero and the motor stops. Arduino Uno The Arduino Uno is a microcontroller board based on the ATmega328. It has 14 digital input/output pins (of which 6 can be used as PWM outputs), 6 analog inputs, a 16 MHz ceramic resonator, a USB connection, a power jack, an ICSP header, and a reset button. It contains everything needed to support the microcontroller; simply connect it to a computer with a USB cable or power it with a AC-to-DC adapter or battery to get started. Project Flow This diagram shows some control signal pulses for a typical servo and the position to which it will rotate in response to the pulse width. A servomotor is a closed-loop servomechanism that uses position feedback to control its motion and final position. The input to its control is some signal, either analogue or digital, representing the position commanded for the output shaft. Page 228

hardware")

arm at")

")

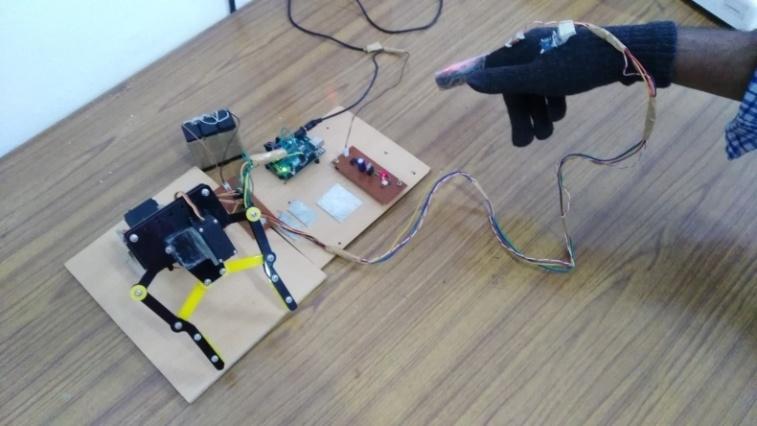
3 Experimental setup e) Arm at maximum position with gripper open a)hardware circuit f)arm faced up with gripper open b)arm at minimum position with gripper closed c)arm at minimum position with gripper open g) Arm faced up with gripper closed d)arm at maximum position with gripper closed f) Arm at down position with gripper open Page 229
flex SENSOR RESISTANCE VS")

 MEMS")
 Object")
4 5) RESULTS& APPLICATIONS i)flex SENSOR RESISTANCE VS ANGLE CHARACTERISTICS g) Arm at down position with gripper closed h) Arm picking object ii) MEMS SENSOR Y-DIRECTION h) Arm rotating object i) Object placed by the arm Page 230
5 iv) MEMS SENSOR CLOCKWISE ROTATION iii) MEMS SENSOR X-DIRECTION Page 231
6 v) MEMS SENSOR ANTICLOCKWISE ROTATION programming can be done with an ease to suit the requirements. Micro controller based programs can be flexibly modified to suit the necessary drive control of the serve motor.as per the hand gesture there is movement of robotic arm in upward and downward direction.the implemented module may used in the application where precise controlling is required. Gesture Controlled Robotic hand is a system which help to control the Robotic hand in real time, according to the gesture of the operator, so it does not required skilled operators to operate such system. This will be used to control the hazardous situation from a remote distance. Such system can be used to handle critical situations if designed precisely. FUTURE SCOPE Growing demand for natural Human Machine Interfaces and robot easy programming platforms, to control an industrial robotic arm was proposed and implemented successfully. A 3-axis accelerometer was selected to be the input device of this system, capturing the human arm behaviour to control the robotic arm movement. Mechanical design: more efficient, reliable, improved power. Universal Gripper: Capable of doing multiple tasks. Sensor Capabilities: flex & accelerometer sensors used for glove wrist movement allowing circular & angular movements. Intelligence-capable of decision making of the task it performs. For precise control on the robotic hand, increase the degree of freedom by using more servo motor pre finger. Equipped robotic hand with more sensors such as proximity sensor, pressure sensor, gyro sensor etc. Developing more efficient user interface for making more user friendly. CONCLUSION The work discusses a hardware and software code sign of robotic arm controller using four servomotors employing micro controller. Micro controller REFERENCES [1] J. Botero-valencia, D. Marquez-viloria, L. Castano-londono, and L. Morantes-guzmán, A low-cost platform based on a robotic arm for parameters Page 232
7 estimation of Inertial Measurement Units, Measurement, vol. 110, pp , [2] Y. Zhao, L. Gong, C. Liu, and Y. Huang, ScienceDirect Dual-arm Dual-arm in Dual-arm Robot Design and Testing for Harvesting Tomato in Greenhouse Greenhouse, IFAC-PapersOnLine, vol. 49, no. 16, pp , robot Router Robot, Autom. Constr., vol. 81, no. June, pp , [10] F. Bertacchini, E. Bilotta, and P. Pantano, Computers in Human Behavior Shopping with a robotic companion, Comput. Human Behav., [3] Y. Zhao, Robotics and Computer-Integrated Manufacturing Dynamic optimum design of a three translational degrees of freedom parallel robot while considering anisotropic property, Robot. Comput. Integr. Manuf., vol. 29, no. 4, pp , [4] S. Gupta, S. Turjo, and A. Kumar, Design optimization of minimally invasive surgical robot, Appl. Soft Comput. J., vol. 32, pp , [5] H. Lin, Y. Liu, and Y. Lin, Intuitive Kinematic Control of a Robot Arm via Human Motion, Procedia Eng., vol. 79, no. 1st ICM, pp , [6] A. Hassan and M. Abomoharam, Robotics and Computer Integrated Manufacturing Modeling and design optimization of a robot gripper mechanism, Robot. Comput. Integr. Manuf., vol. 46, no. December 2016, pp , [7] S. Pellegrinelli, A. Orlandini, N. Pedrocchi, A. Umbrico, and T. Tolio, CIRP Annals - Manufacturing Technology Motion planning and scheduling for human and industrial-robot collaboration, CIRP Ann. - Manuf. Technol., vol. 66, no. 1, pp. 1 4, [8] R. Roy, M. Mahadevappa, and C. S. Kumar, Trajectory path planning of EEG controlled robotic arm using GA, Procedia - Procedia Comput. Sci., vol. 84, pp , [9] A. Beckett and R. Ross, Automation in Construction PyroShield - A HVAC fi re curtain testing Page 233
DC motor control using arduino
 DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
HAND GESTURE CONTROLLED ROBOT USING ARDUINO
 HAND GESTURE CONTROLLED ROBOT USING ARDUINO Vrushab Sakpal 1, Omkar Patil 2, Sagar Bhagat 3, Badar Shaikh 4, Prof.Poonam Patil 5 1,2,3,4,5 Department of Instrumentation Bharati Vidyapeeth C.O.E,Kharghar,Navi
HAND GESTURE CONTROLLED ROBOT USING ARDUINO Vrushab Sakpal 1, Omkar Patil 2, Sagar Bhagat 3, Badar Shaikh 4, Prof.Poonam Patil 5 1,2,3,4,5 Department of Instrumentation Bharati Vidyapeeth C.O.E,Kharghar,Navi
FLEXIBLE ROBOT USING AUTOMATED OBJECT SENSING AND SERVING WITH GRIPPER MECHANISM
 FLEXIBLE ROBOT USING AUTOMATED OBJECT SENSING AND SERVING WITH GRIPPER MECHANISM G. Raja *(1) D.R.P. Rajarathnam (2) N. Keertha sanjai (3) M. Manikandan (3) G. Balamurugan (3) R.Ragul (3) (1) Assistant
FLEXIBLE ROBOT USING AUTOMATED OBJECT SENSING AND SERVING WITH GRIPPER MECHANISM G. Raja *(1) D.R.P. Rajarathnam (2) N. Keertha sanjai (3) M. Manikandan (3) G. Balamurugan (3) R.Ragul (3) (1) Assistant
ARDUINO BASED DC MOTOR SPEED CONTROL
 ARDUINO BASED DC MOTOR SPEED CONTROL Student of Electrical Engineering Department 1.Hirdesh Kr. Saini 2.Shahid Firoz 3.Ashutosh Pandey Abstract The Uno is a microcontroller board based on the ATmega328P.
ARDUINO BASED DC MOTOR SPEED CONTROL Student of Electrical Engineering Department 1.Hirdesh Kr. Saini 2.Shahid Firoz 3.Ashutosh Pandey Abstract The Uno is a microcontroller board based on the ATmega328P.
Robotic Hand Using Arduino
 Robotic Hand Using Arduino Varun Sant 1, Kartik Penshanwar 2, Akshay Sarkate 3, Prof.A.V.Walke 4 Padmabhoshan Vasantdada Patil Institute of Technology, Bavdhan, Pune, INDIA Abstract: This paper highlights
Robotic Hand Using Arduino Varun Sant 1, Kartik Penshanwar 2, Akshay Sarkate 3, Prof.A.V.Walke 4 Padmabhoshan Vasantdada Patil Institute of Technology, Bavdhan, Pune, INDIA Abstract: This paper highlights
Optimization and Performance Evaluation of Single Axis Arduino Solar Tracker
 Optimization and Performance Evaluation of Single Axis Arduino Solar Tracker B. Sujatha Assistant Professor, Dept of EEE sujathareddy4311@gmail.com J. Sravana Kalyani UG Student, Dept of EEE sravanijandhyala066@gmail.com
Optimization and Performance Evaluation of Single Axis Arduino Solar Tracker B. Sujatha Assistant Professor, Dept of EEE sujathareddy4311@gmail.com J. Sravana Kalyani UG Student, Dept of EEE sravanijandhyala066@gmail.com
Introduction: Components used:
 Introduction: As, this robotic arm is automatic in a way that it can decides where to move and when to move, therefore it works in a closed loop system where sensor detects if there is any object in a
Introduction: As, this robotic arm is automatic in a way that it can decides where to move and when to move, therefore it works in a closed loop system where sensor detects if there is any object in a
Training Schedule. Robotic System Design using Arduino Platform
 Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1 Student of MTECH CAD/CAM, Department of Mechanical Engineering, GHRCE Nagpur, MH, India
 Design and simulation of robotic arm for loading and unloading of work piece on lathe machine by using workspace simulation software: A Review Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1
Design and simulation of robotic arm for loading and unloading of work piece on lathe machine by using workspace simulation software: A Review Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1
ISSN: [Singh* et al., 6(6): June, 2017] Impact Factor: 4.116
![ISSN: [Singh* et al., 6(6): June, 2017] Impact Factor: 4.116](/thumbs/96/126741285.jpg "ISSN: [Singh* et al., 6(6): June, 2017] Impact Factor: 4.116") IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY WORKING, OPERATION AND TYPES OF ARDUINO MICROCONTROLLER Bhupender Singh, Manisha Verma Assistant Professor, Electrical Department,
IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY WORKING, OPERATION AND TYPES OF ARDUINO MICROCONTROLLER Bhupender Singh, Manisha Verma Assistant Professor, Electrical Department,
Distance Measurement of an Object by using Ultrasonic Sensors with Arduino and GSM Module
 IJSTE - International Journal of Science Technology & Engineering Volume 4 Issue 11 May 2018 ISSN (online): 2349-784X Distance Measurement of an Object by using Ultrasonic Sensors with Arduino and GSM
IJSTE - International Journal of Science Technology & Engineering Volume 4 Issue 11 May 2018 ISSN (online): 2349-784X Distance Measurement of an Object by using Ultrasonic Sensors with Arduino and GSM
WiCon Robo Hand. Electrical & Computer Engineering Department, Texas A&M University at Qatar
 WiCon Robo Hand Team Members: Mouhyemen Khan Arian Yusuf Ahmed Ragheeb Nouran Mohamed Team Name: N-ARM Electrical & Computer Engineering Department, Texas A&M University at Qatar Submitted to Dr. Haitham
WiCon Robo Hand Team Members: Mouhyemen Khan Arian Yusuf Ahmed Ragheeb Nouran Mohamed Team Name: N-ARM Electrical & Computer Engineering Department, Texas A&M University at Qatar Submitted to Dr. Haitham
DC Motor Control using Fuzzy Logic Controller for Input to Five Bar Planar Mechanism
 DC Motor Control using Fuzzy Logic Controller for Input to Five Bar Planar Mechanism Aditi A. Abhyankar #1, S. M. Chaudhari *2 # Department of Electrical Engineering, AISSMS s Institute of Information
DC Motor Control using Fuzzy Logic Controller for Input to Five Bar Planar Mechanism Aditi A. Abhyankar #1, S. M. Chaudhari *2 # Department of Electrical Engineering, AISSMS s Institute of Information
KINECT CONTROLLED HUMANOID AND HELICOPTER
 KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
ISSN (Online)
") International Journal of Engineering Research in Electrical and Electronic Design and Implementation of Robot Arm Control Based on Matlab with Arduino Interface [1] T.Rajesh, [2] M. Karthik Reddy, [3]
International Journal of Engineering Research in Electrical and Electronic Design and Implementation of Robot Arm Control Based on Matlab with Arduino Interface [1] T.Rajesh, [2] M. Karthik Reddy, [3]
FABO ACADEMY X ELECTRONIC DESIGN
 ELECTRONIC DESIGN MAKE A DEVICE WITH INPUT & OUTPUT The Shanghaino can be programmed to use many input and output devices (a motor, a light sensor, etc) uploading an instruction code (a program) to it
ELECTRONIC DESIGN MAKE A DEVICE WITH INPUT & OUTPUT The Shanghaino can be programmed to use many input and output devices (a motor, a light sensor, etc) uploading an instruction code (a program) to it
FLEX SENSOR BASED ROBOTIC ARM CONTROLLER: DEVELOPMENT
 FLEX SENSOR BASED ROBOTIC ARM CONTROLLER: DEVELOPMENT Jagtap Gautami 1, Alve Sampada 2, Malhotra Sahil 3, Pankaj Dadhich 4 Electronics and Telecommunication Department, Guru Gobind Singh Polytechnic, Nashik
FLEX SENSOR BASED ROBOTIC ARM CONTROLLER: DEVELOPMENT Jagtap Gautami 1, Alve Sampada 2, Malhotra Sahil 3, Pankaj Dadhich 4 Electronics and Telecommunication Department, Guru Gobind Singh Polytechnic, Nashik
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE. Imagine Your Business...better. Automate Virtually Anything jhfoster.
 John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
ADVANCED SAFETY APPLICATIONS FOR RAILWAY CROSSING
 ADVANCED SAFETY APPLICATIONS FOR RAILWAY CROSSING 1 HARSHUL BALANI, 2 CHARU GUPTA, 3 KRATIKA SUKHWAL 1,2,3 B.TECH (ECE), Poornima College Of Engineering, RTU E-mail; 1 harshul.balani@gmail.com, 2 charu95g@gmail.com,
ADVANCED SAFETY APPLICATIONS FOR RAILWAY CROSSING 1 HARSHUL BALANI, 2 CHARU GUPTA, 3 KRATIKA SUKHWAL 1,2,3 B.TECH (ECE), Poornima College Of Engineering, RTU E-mail; 1 harshul.balani@gmail.com, 2 charu95g@gmail.com,
Study of M.A.R.S. (Multifunctional Aero-drone for Remote Surveillance)
") Study of M.A.R.S. (Multifunctional Aero-drone for Remote Surveillance) Supriya Bhuran 1, Rohit V. Agrawal 2, Kiran D. Bombe 2, Somiran T. Karmakar 2, Ninad V. Bapat 2 1 Assistant Professor, Dept. Instrumentation,
Study of M.A.R.S. (Multifunctional Aero-drone for Remote Surveillance) Supriya Bhuran 1, Rohit V. Agrawal 2, Kiran D. Bombe 2, Somiran T. Karmakar 2, Ninad V. Bapat 2 1 Assistant Professor, Dept. Instrumentation,
Design and Control of the BUAA Four-Fingered Hand
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
III. MATERIAL AND COMPONENTS USED
 Prototype Development of a Smartphone- Controlled Robotic Vehicle with Pick- Place Capability Dheeraj Sharma Electronics and communication department Gian Jyoti Institute Of Engineering And Technology,
Prototype Development of a Smartphone- Controlled Robotic Vehicle with Pick- Place Capability Dheeraj Sharma Electronics and communication department Gian Jyoti Institute Of Engineering And Technology,
Job Sheet 2 Servo Control
 Job Sheet 2 Servo Control Electrical actuators are replacing hydraulic actuators in many industrial applications. Electric servomotors and linear actuators can perform many of the same physical displacement
Job Sheet 2 Servo Control Electrical actuators are replacing hydraulic actuators in many industrial applications. Electric servomotors and linear actuators can perform many of the same physical displacement
Introduction to robotics. Md. Ferdous Alam, Lecturer, MEE, SUST
 Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
DC Motor and Servo motor Control with ARM and Arduino. Created by:
 DC Motor and Servo motor Control with ARM and Arduino Created by: Andrew Kaler (39345) Tucker Boyd (46434) Mohammed Chowdhury (860822) Tazwar Muttaqi (901700) Mark Murdock (98071) May 4th, 2017 Objective
DC Motor and Servo motor Control with ARM and Arduino Created by: Andrew Kaler (39345) Tucker Boyd (46434) Mohammed Chowdhury (860822) Tazwar Muttaqi (901700) Mark Murdock (98071) May 4th, 2017 Objective
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM
 CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
SELF STABILIZING PLATFORM
 SELF STABILIZING PLATFORM Shalaka Turalkar 1, Omkar Padvekar 2, Nikhil Chavan 3, Pritam Sawant 4 and Project Guide: Mr Prathamesh Indulkar 5. 1,2,3,4,5 Department of Electronics and Telecommunication,
SELF STABILIZING PLATFORM Shalaka Turalkar 1, Omkar Padvekar 2, Nikhil Chavan 3, Pritam Sawant 4 and Project Guide: Mr Prathamesh Indulkar 5. 1,2,3,4,5 Department of Electronics and Telecommunication,
Autonomous. Chess Playing. Robot
 Autonomous Chess Playing Robot Team Members 1. Amit Saharan 2. Gaurav Raj 3. Riya Gupta 4. Saumya Jaiswal 5. Shilpi Agrawal 6. Varun Gupta Mentors 1. Mukund Tibrewal 2. Hardik Soni 3. Zaid Tasneem Abstract
Autonomous Chess Playing Robot Team Members 1. Amit Saharan 2. Gaurav Raj 3. Riya Gupta 4. Saumya Jaiswal 5. Shilpi Agrawal 6. Varun Gupta Mentors 1. Mukund Tibrewal 2. Hardik Soni 3. Zaid Tasneem Abstract
AUTONOMOUS MOTION CONTROLLED HAND-ARM ROBOTIC SYSTEM
 Autonomous Motion Controlled Hand-Arm Robotic System AUTONOMOUS MOTION CONTROLLED HAND-ARM ROBOTIC SYSTEM NIJI JOHNSON AND P.SIVASANKAR RAJAMANI KSR College of Engineering,Thiruchengode-637215 Abstract:
Autonomous Motion Controlled Hand-Arm Robotic System AUTONOMOUS MOTION CONTROLLED HAND-ARM ROBOTIC SYSTEM NIJI JOHNSON AND P.SIVASANKAR RAJAMANI KSR College of Engineering,Thiruchengode-637215 Abstract:
GESTURE BASED ROBOTIC ARM
 GESTURE BASED ROBOTIC ARM Arusha Suyal 1, Anubhav Gupta 2, Manushree Tyagi 3 1,2,3 Department of Instrumentation And Control Engineering, JSSATE, Noida, (India) ABSTRACT In recent years, there are development
GESTURE BASED ROBOTIC ARM Arusha Suyal 1, Anubhav Gupta 2, Manushree Tyagi 3 1,2,3 Department of Instrumentation And Control Engineering, JSSATE, Noida, (India) ABSTRACT In recent years, there are development
Internet Controlled Robotic Arm
 Available online at www.sciencedirect.com Procedia Engineering 41 (2012 ) 1065 1071 International Symposium on Robotics and Intelligent Sensors 2012 (IRIS 2012) Internet Controlled Robotic Arm Wan Muhamad
Available online at www.sciencedirect.com Procedia Engineering 41 (2012 ) 1065 1071 International Symposium on Robotics and Intelligent Sensors 2012 (IRIS 2012) Internet Controlled Robotic Arm Wan Muhamad
IMU Platform for Workshops
 IMU Platform for Workshops Lukáš Palkovič *, Jozef Rodina *, Peter Hubinský *3 * Institute of Control and Industrial Informatics Faculty of Electrical Engineering, Slovak University of Technology Ilkovičova
IMU Platform for Workshops Lukáš Palkovič *, Jozef Rodina *, Peter Hubinský *3 * Institute of Control and Industrial Informatics Faculty of Electrical Engineering, Slovak University of Technology Ilkovičova
Gesture Controlled Car
 Gesture Controlled Car Chirag Gupta Department of ECE ITM University Nitin Garg Department of ECE ITM University ABSTRACT Gesture Controlled Car is a robot which can be controlled by simple human gestures.
Gesture Controlled Car Chirag Gupta Department of ECE ITM University Nitin Garg Department of ECE ITM University ABSTRACT Gesture Controlled Car is a robot which can be controlled by simple human gestures.
BOAT LOCALIZATION AND WARNING SYSTEM FOR BORDER IDENTIFICATION
 BOAT LOCALIZATION AND WARNING SYSTEM FOR BORDER IDENTIFICATION Mr.Vasudevan, Ms.Aarthi.C, Ms.Arunthathi.M, Ms.Durgakalaimathi.L.T, Ms.Evangelin Darvia.P 1Professor, Dept. of ECE, Panimalar Engineering
BOAT LOCALIZATION AND WARNING SYSTEM FOR BORDER IDENTIFICATION Mr.Vasudevan, Ms.Aarthi.C, Ms.Arunthathi.M, Ms.Durgakalaimathi.L.T, Ms.Evangelin Darvia.P 1Professor, Dept. of ECE, Panimalar Engineering
AN ARDUINO CONTROLLED CHAOTIC PENDULUM FOR A REMOTE PHYSICS LABORATORY
 AN ARDUINO CONTROLLED CHAOTIC PENDULUM FOR A REMOTE PHYSICS LABORATORY J. C. Álvarez, J. Lamas, A. J. López, A. Ramil Universidade da Coruña (SPAIN) carlos.alvarez@udc.es, jlamas@udc.es, ana.xesus.lopez@udc.es,
AN ARDUINO CONTROLLED CHAOTIC PENDULUM FOR A REMOTE PHYSICS LABORATORY J. C. Álvarez, J. Lamas, A. J. López, A. Ramil Universidade da Coruña (SPAIN) carlos.alvarez@udc.es, jlamas@udc.es, ana.xesus.lopez@udc.es,
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing
 Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
WIRELESS VOICE CONTROLLED ROBOTICS ARM
 WIRELESS VOICE CONTROLLED ROBOTICS ARM 1 R.ASWINBALAJI, 2 A.ARUNRAJA 1 BE ECE,SRI RAMAKRISHNA ENGINEERING COLLEGE,COIMBATORE,INDIA 2 ME EST,SRI RAMAKRISHNA ENGINEERING COLLEGE,COIMBATORE,INDIA aswinbalaji94@gmail.com
WIRELESS VOICE CONTROLLED ROBOTICS ARM 1 R.ASWINBALAJI, 2 A.ARUNRAJA 1 BE ECE,SRI RAMAKRISHNA ENGINEERING COLLEGE,COIMBATORE,INDIA 2 ME EST,SRI RAMAKRISHNA ENGINEERING COLLEGE,COIMBATORE,INDIA aswinbalaji94@gmail.com
INTELLIGENT HUMANOID LEGS
 INTELLIGENT HUMANOID LEGS GUNJAN KADU, SANKET ZADE Gunjan Kadu, Electronics and Telecommunication Engineering, SVPCET, Nagpur Maharashtra, India Sanket Zade, Electronics and Telecommunication Engineering,
INTELLIGENT HUMANOID LEGS GUNJAN KADU, SANKET ZADE Gunjan Kadu, Electronics and Telecommunication Engineering, SVPCET, Nagpur Maharashtra, India Sanket Zade, Electronics and Telecommunication Engineering,
Wirelessly Controlled Wheeled Robotic Arm
 Wirelessly Controlled Wheeled Robotic Arm Muhammmad Tufail 1, Mian Muhammad Kamal 2, Muhammad Jawad 3 1 Department of Electrical Engineering City University of science and Information Technology Peshawar
Wirelessly Controlled Wheeled Robotic Arm Muhammmad Tufail 1, Mian Muhammad Kamal 2, Muhammad Jawad 3 1 Department of Electrical Engineering City University of science and Information Technology Peshawar
An IoT Based Real-Time Environmental Monitoring System Using Arduino and Cloud Service
 Engineering, Technology & Applied Science Research Vol. 8, No. 4, 2018, 3238-3242 3238 An IoT Based Real-Time Environmental Monitoring System Using Arduino and Cloud Service Saima Zafar Emerging Sciences,
Engineering, Technology & Applied Science Research Vol. 8, No. 4, 2018, 3238-3242 3238 An IoT Based Real-Time Environmental Monitoring System Using Arduino and Cloud Service Saima Zafar Emerging Sciences,
DESIGN AND OPERATION OF SYNCHRONIZED ROBOTIC ARM
 DESIGN AND OPERATION OF SYNCHRONIZED ROBOTIC ARM Goldy Katal 1, Saahil Gupta 2, Shitij Kakkar 3 1 Student, Electrical and Electronics Department, Maharaja Agrasen Institute of Technology, Delhi, India,
DESIGN AND OPERATION OF SYNCHRONIZED ROBOTIC ARM Goldy Katal 1, Saahil Gupta 2, Shitij Kakkar 3 1 Student, Electrical and Electronics Department, Maharaja Agrasen Institute of Technology, Delhi, India,
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
A Model Based Approach for Human Recognition and Reception by Robot
 16 MHz ARDUINO A Model Based Approach for Human Recognition and Reception by Robot Prof. R. Sunitha Department Of ECE, N.R.I Institute Of Technology, J.N.T University, Kakinada, India. V. Sai Krishna,
16 MHz ARDUINO A Model Based Approach for Human Recognition and Reception by Robot Prof. R. Sunitha Department Of ECE, N.R.I Institute Of Technology, J.N.T University, Kakinada, India. V. Sai Krishna,
Arduino STEAM Academy Arduino STEM Academy Art without Engineering is dreaming. Engineering without Art is calculating. - Steven K.
 Arduino STEAM Academy Arduino STEM Academy Art without Engineering is dreaming. Engineering without Art is calculating. - Steven K. Roberts Page 1 See Appendix A, for Licensing Attribution information
Arduino STEAM Academy Arduino STEM Academy Art without Engineering is dreaming. Engineering without Art is calculating. - Steven K. Roberts Page 1 See Appendix A, for Licensing Attribution information
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Advanced Mechatronics 1 st Mini Project. Remote Control Car. Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014
 Advanced Mechatronics 1 st Mini Project Remote Control Car Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014 Remote Control Car Manual Control with the remote and direction buttons Automatic
Advanced Mechatronics 1 st Mini Project Remote Control Car Jose Antonio De Gracia Gómez, Amartya Barua March, 25 th 2014 Remote Control Car Manual Control with the remote and direction buttons Automatic
Devastator Tank Mobile Platform with Edison SKU:ROB0125
 Devastator Tank Mobile Platform with Edison SKU:ROB0125 From Robot Wiki Contents 1 Introduction 2 Tutorial 2.1 Chapter 2: Run! Devastator! 2.2 Chapter 3: Expansion Modules 2.3 Chapter 4: Build The Devastator
Devastator Tank Mobile Platform with Edison SKU:ROB0125 From Robot Wiki Contents 1 Introduction 2 Tutorial 2.1 Chapter 2: Run! Devastator! 2.2 Chapter 3: Expansion Modules 2.3 Chapter 4: Build The Devastator
3. Hardware Design D Model
 Volume 116 No. 20 2017, 463-469 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu BLUETOOTH CONTROLLED 5 AXIS ARTICULATED ROBOT MANIPULATOR WITH ADAPTIVE
Volume 116 No. 20 2017, 463-469 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu BLUETOOTH CONTROLLED 5 AXIS ARTICULATED ROBOT MANIPULATOR WITH ADAPTIVE
Pick and Place Robotic Arm Using Arduino
 Pick and Place Robotic Arm Using Arduino Harish K 1, Megha D 2, Shuklambari M 3, Amit K 4, Chaitanya K Jambotkar 5 1,2,3,4 5 th SEM Students in Department of Electrical and Electronics Engineering, KLE.I.T,
Pick and Place Robotic Arm Using Arduino Harish K 1, Megha D 2, Shuklambari M 3, Amit K 4, Chaitanya K Jambotkar 5 1,2,3,4 5 th SEM Students in Department of Electrical and Electronics Engineering, KLE.I.T,
Welcome to Arduino Day 2016
 Welcome to Arduino Day 2016 An Intro to Arduino From Zero to Hero in an Hour! Paul Court (aka @Courty) Welcome to the SLMS Arduino Day 2016 Arduino / Genuino?! What?? Part 1 Intro Quick Look at the Uno
Welcome to Arduino Day 2016 An Intro to Arduino From Zero to Hero in an Hour! Paul Court (aka @Courty) Welcome to the SLMS Arduino Day 2016 Arduino / Genuino?! What?? Part 1 Intro Quick Look at the Uno
IOSR Journal of Engineering (IOSRJEN) e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43
 e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43") IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
Ultra Modern Robotic Helping Hand
 Ultra Modern Robotic Helping Hand [1] Vemula Sai Naveen [2] Anil Naidu [3] Varun.M [4] M.Shreyas [1][2][3][4] UG scholar, RNS Institute of Technology Bangalore-98 Abstract: --- imagine a robot that follows
Ultra Modern Robotic Helping Hand [1] Vemula Sai Naveen [2] Anil Naidu [3] Varun.M [4] M.Shreyas [1][2][3][4] UG scholar, RNS Institute of Technology Bangalore-98 Abstract: --- imagine a robot that follows
Megamark Arduino Library Documentation
 Megamark Arduino Library Documentation The Choitek Megamark is an advanced full-size multipurpose mobile manipulator robotics platform for students, artists, educators and researchers alike. In our mission
Megamark Arduino Library Documentation The Choitek Megamark is an advanced full-size multipurpose mobile manipulator robotics platform for students, artists, educators and researchers alike. In our mission
AUOTOMATIC PICK AND PLACE ROBOT
 AUOTOMATIC PICK AND PLACE ROBOT Mr.Kunal Sali 1, Mr. Saiprasad Kolhe 2, Mr.Mayank Paliwal 3 1,2,3 Department of E&TC. Engg, Sandip Foundation, SITRC College, Nashik,(India) ABSTRACT In this paper we deal
AUOTOMATIC PICK AND PLACE ROBOT Mr.Kunal Sali 1, Mr. Saiprasad Kolhe 2, Mr.Mayank Paliwal 3 1,2,3 Department of E&TC. Engg, Sandip Foundation, SITRC College, Nashik,(India) ABSTRACT In this paper we deal
MAKEVMA502 BASIC DIY KIT WITH ATMEGA2560 FOR ARDUINO USER MANUAL
 BASIC DIY KIT WITH ATMEGA2560 FOR ARDUINO USER MANUAL USER MANUAL 1. Introduction To all residents of the European Union Important environmental information about this product This symbol on the device
BASIC DIY KIT WITH ATMEGA2560 FOR ARDUINO USER MANUAL USER MANUAL 1. Introduction To all residents of the European Union Important environmental information about this product This symbol on the device
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Available online Journal of Scientific and Engineering Research, 2018, 5(4): Research Article
: Research Article") Available online www.jsaer.com, 2018, 5(4):341-349 Research Article ISSN: 2394-2630 CODEN(USA): JSERBR Arduino Based door Automation System Using Ultrasonic Sensor and Servo Motor Orji EZ*, Oleka CV, Nduanya
Available online www.jsaer.com, 2018, 5(4):341-349 Research Article ISSN: 2394-2630 CODEN(USA): JSERBR Arduino Based door Automation System Using Ultrasonic Sensor and Servo Motor Orji EZ*, Oleka CV, Nduanya
Accident Sensor with Google Map Locator
 IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 10 March 2016 ISSN (online): 2349-6010 Accident Sensor with Google Map Locator Steffie Tom Keval Velip Aparna
IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 10 March 2016 ISSN (online): 2349-6010 Accident Sensor with Google Map Locator Steffie Tom Keval Velip Aparna
WifiBotics. An Arduino Based Robotics Workshop
 WifiBotics An Arduino Based Robotics Workshop WifiBotics is the workshop designed by RoboKart group pioneers in this field way back in 2014 and copied by many competitors. This workshop is based on the
WifiBotics An Arduino Based Robotics Workshop WifiBotics is the workshop designed by RoboKart group pioneers in this field way back in 2014 and copied by many competitors. This workshop is based on the
ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything
 John Henry Foster ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 At John Henry Foster, we re devoted to bringing safe, flexible,
John Henry Foster ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 At John Henry Foster, we re devoted to bringing safe, flexible,
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
Design and Control of an Anthropomorphic Robotic Arm
 Journal Of Industrial Engineering Research ISSN- 2077-4559 Journal home page: http://www.iwnest.com/ijer/ 2016. 2(1): 1-8 RSEARCH ARTICLE Design and Control of an Anthropomorphic Robotic Arm Simon A/L
Journal Of Industrial Engineering Research ISSN- 2077-4559 Journal home page: http://www.iwnest.com/ijer/ 2016. 2(1): 1-8 RSEARCH ARTICLE Design and Control of an Anthropomorphic Robotic Arm Simon A/L
Interface H-bridge to Microcontroller, Battery Power and Gearbox to H-bridge Last Updated September 28, Background
 1 ME313 Project Assignment #2 Interface H-bridge to Microcontroller, Battery Power and Gearbox to H-bridge Last Updated September 28, 2015. Background The objective of the ME313 project is to fabricate
1 ME313 Project Assignment #2 Interface H-bridge to Microcontroller, Battery Power and Gearbox to H-bridge Last Updated September 28, 2015. Background The objective of the ME313 project is to fabricate
Development of An Experimental Setup for the Altitude Control of A Ball in A Pipe Şeyma AKYÜREK 1,a,GizemSezin ÖZDEN 1,b, Coşku KASNAKOĞLU 1,c
 Applied Mechanics and Materials Vols. 789-790 (2015) pp 1016-1020 (2015) Trans Tech Publications, Switzerland doi:10.4028/www.scientific.net/amm.789-790.1016 Development of An Experimental Setup for the
Applied Mechanics and Materials Vols. 789-790 (2015) pp 1016-1020 (2015) Trans Tech Publications, Switzerland doi:10.4028/www.scientific.net/amm.789-790.1016 Development of An Experimental Setup for the
Microcontroller Based Closed Loop Speed and Position Control of DC Motor
 International Journal of Engineering and Advanced Technology (IJEAT) ISSN: 2249 8958, Volume-3, Issue-5, June 2014 Microcontroller Based Closed Loop Speed and Position Control of DC Motor Panduranga Talavaru,
International Journal of Engineering and Advanced Technology (IJEAT) ISSN: 2249 8958, Volume-3, Issue-5, June 2014 Microcontroller Based Closed Loop Speed and Position Control of DC Motor Panduranga Talavaru,
PRODUCTS AND LAB SOLUTIONS
 PRODUCTS AND LAB SOLUTIONS Answering the most challenging academic questions with innovative technology and methods Quanser is the global leader in the design and manufacture of lab solutions and products
PRODUCTS AND LAB SOLUTIONS Answering the most challenging academic questions with innovative technology and methods Quanser is the global leader in the design and manufacture of lab solutions and products
Fabrication of the kinect remote-controlled cars and planning of the motion interaction courses
 Available online at www.sciencedirect.com ScienceDirect Procedia - Social and Behavioral Sciences 174 ( 2015 ) 3102 3107 INTE 2014 Fabrication of the kinect remote-controlled cars and planning of the motion
Available online at www.sciencedirect.com ScienceDirect Procedia - Social and Behavioral Sciences 174 ( 2015 ) 3102 3107 INTE 2014 Fabrication of the kinect remote-controlled cars and planning of the motion
ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
 Journal of Young Scientist, Volume IV, 2016 ISSN 2344-1283; ISSN CD-ROM 2344-1291; ISSN Online 2344-1305; ISSN-L 2344 1283 ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
Journal of Young Scientist, Volume IV, 2016 ISSN 2344-1283; ISSN CD-ROM 2344-1291; ISSN Online 2344-1305; ISSN-L 2344 1283 ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
The Torxis Linear Servo meets the following environmental conditions:
 Page: 1 1. PRODUCT DESCRIPTION The Torxis Linear Servo is the second generation of linear servos provided by GearWurx. This product features internal position sensing, and closed loop position control.
Page: 1 1. PRODUCT DESCRIPTION The Torxis Linear Servo is the second generation of linear servos provided by GearWurx. This product features internal position sensing, and closed loop position control.
Design and Development of Novel Two Axis Servo Control Mechanism
 Design and Development of Novel Two Axis Servo Control Mechanism Shailaja Kurode, Chinmay Dharmadhikari, Mrinmay Atre, Aniruddha Katti, Shubham Shambharkar Abstract This paper presents design and development
Design and Development of Novel Two Axis Servo Control Mechanism Shailaja Kurode, Chinmay Dharmadhikari, Mrinmay Atre, Aniruddha Katti, Shubham Shambharkar Abstract This paper presents design and development
Object Detection for Collision Avoidance in ITS
 Available online www.ejaet.com European Journal of Advances in Engineering and Technology, 2016, 3(5): 29-35 Research Article ISSN: 2394-658X Object Detection for Collision Avoidance in ITS Rupojyoti Kar
Available online www.ejaet.com European Journal of Advances in Engineering and Technology, 2016, 3(5): 29-35 Research Article ISSN: 2394-658X Object Detection for Collision Avoidance in ITS Rupojyoti Kar
MEMS Accelerometer sensor controlled robot with wireless video camera mounted on it
 MEMS Accelerometer sensor controlled robot with wireless video camera mounted on it The main aim of this project is video coverage at required places with the help of digital camera and high power LED.
MEMS Accelerometer sensor controlled robot with wireless video camera mounted on it The main aim of this project is video coverage at required places with the help of digital camera and high power LED.
A Do-and-See Approach for Learning Mechatronics Concepts
 Proceedings of the 5 th International Conference of Control, Dynamic Systems, and Robotics (CDSR'18) Niagara Falls, Canada June 7 9, 2018 Paper No. 124 DOI: 10.11159/cdsr18.124 A Do-and-See Approach for
Proceedings of the 5 th International Conference of Control, Dynamic Systems, and Robotics (CDSR'18) Niagara Falls, Canada June 7 9, 2018 Paper No. 124 DOI: 10.11159/cdsr18.124 A Do-and-See Approach for
GESTUR. Sensing & Feedback Glove for interfacing with Virtual Reality
 GESTUR Sensing & Feedback Glove for interfacing with Virtual Reality Initial Design Review ECE 189A, Fall 2016 University of California, Santa Barbara History & Introduction - Oculus and Vive are great
GESTUR Sensing & Feedback Glove for interfacing with Virtual Reality Initial Design Review ECE 189A, Fall 2016 University of California, Santa Barbara History & Introduction - Oculus and Vive are great
Introducing the Quadrotor Flying Robot
 Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Multipurpose Iron Man Glove & Moveable Platform
 Trinity University Digital Commons @ Trinity Mechatronics Final Projects Engineering Science Department 5-2018 Multipurpose Iron Man Glove & Moveable Platform Destinee Davis Trinity University, ddavis2@trinity.edu
Trinity University Digital Commons @ Trinity Mechatronics Final Projects Engineering Science Department 5-2018 Multipurpose Iron Man Glove & Moveable Platform Destinee Davis Trinity University, ddavis2@trinity.edu
ROBOTIC ARM FOR OBJECT SORTING BASED ON COLOR
 ROBOTIC ARM FOR OBJECT SORTING BASED ON COLOR ASRA ANJUM 1, Y. ARUNA SUHASINI DEVI 2 1 Asra Anjum, M.Tech Student, Dept Of ECE, CMR College Of Engg And Tech, Kandlakoya, Medchal, Telangana, India. 2 Y.
ROBOTIC ARM FOR OBJECT SORTING BASED ON COLOR ASRA ANJUM 1, Y. ARUNA SUHASINI DEVI 2 1 Asra Anjum, M.Tech Student, Dept Of ECE, CMR College Of Engg And Tech, Kandlakoya, Medchal, Telangana, India. 2 Y.
Assembly Guide Robokits India
 Robotic Arm 5 DOF Assembly Guide Robokits India info@robokits.co.in Robokits World http://www.robokitsworld.com http://www.robokitsworld.com Page 1 Overview : 5 DOF Robotic Arm from Robokits is a robotic
Robotic Arm 5 DOF Assembly Guide Robokits India info@robokits.co.in Robokits World http://www.robokitsworld.com http://www.robokitsworld.com Page 1 Overview : 5 DOF Robotic Arm from Robokits is a robotic
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control. October 5, 2009 Dr. Harrison H. Chin
 2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
JEPPIAAR ENGINEERING COLLEGE
 JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Internet of Things Student STEM Project Jackson High School. Lesson 3: Arduino Solar Tracker
 Internet of Things Student STEM Project Jackson High School Lesson 3: Arduino Solar Tracker Lesson 3 Arduino Solar Tracker Time to complete Lesson 60-minute class period Learning objectives Students learn
Internet of Things Student STEM Project Jackson High School Lesson 3: Arduino Solar Tracker Lesson 3 Arduino Solar Tracker Time to complete Lesson 60-minute class period Learning objectives Students learn
Development of a Robotic Vehicle and Implementation of a Control Strategy for Gesture Recognition through Leap Motion device
 RESEARCH ARTICLE OPEN ACCESS Development of a Robotic Vehicle and Implementation of a Control Strategy for Gesture Recognition through Leap Motion device 1 Dr. V. Nithya, 2 T. Sree Harsha, 3 G. Tarun Kumar,
RESEARCH ARTICLE OPEN ACCESS Development of a Robotic Vehicle and Implementation of a Control Strategy for Gesture Recognition through Leap Motion device 1 Dr. V. Nithya, 2 T. Sree Harsha, 3 G. Tarun Kumar,
GE 320: Introduction to Control Systems
 GE 320: Introduction to Control Systems Laboratory Section Manual 1 Welcome to GE 320.. 1 www.softbankrobotics.com 1 1 Introduction This section summarizes the course content and outlines the general procedure
GE 320: Introduction to Control Systems Laboratory Section Manual 1 Welcome to GE 320.. 1 www.softbankrobotics.com 1 1 Introduction This section summarizes the course content and outlines the general procedure
Energy Efficiency for Secured Smart Village using IoT
 Energy Efficiency for Secured Smart Village using IoT S.P. Angelin Claret 1 1 Asst. Prof, Department of Computer Science, SRM Institute of Science & Technology, Chennai. Abstract: This paper is all about
Energy Efficiency for Secured Smart Village using IoT S.P. Angelin Claret 1 1 Asst. Prof, Department of Computer Science, SRM Institute of Science & Technology, Chennai. Abstract: This paper is all about
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
MOBILE ROBOT LOCALIZATION with POSITION CONTROL
 T.C. DOKUZ EYLÜL UNIVERSITY ENGINEERING FACULTY ELECTRICAL & ELECTRONICS ENGINEERING DEPARTMENT MOBILE ROBOT LOCALIZATION with POSITION CONTROL Project Report by Ayhan ŞAVKLIYILDIZ - 2011502093 Burcu YELİS
T.C. DOKUZ EYLÜL UNIVERSITY ENGINEERING FACULTY ELECTRICAL & ELECTRONICS ENGINEERING DEPARTMENT MOBILE ROBOT LOCALIZATION with POSITION CONTROL Project Report by Ayhan ŞAVKLIYILDIZ - 2011502093 Burcu YELİS
Automobile Prototype Servo Control
 IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 10 March 2016 ISSN (online): 2349-6010 Automobile Prototype Servo Control Mr. Linford William Fernandes Don Bosco
IJIRST International Journal for Innovative Research in Science & Technology Volume 2 Issue 10 March 2016 ISSN (online): 2349-6010 Automobile Prototype Servo Control Mr. Linford William Fernandes Don Bosco
PRESENTED BY HUMANOID IIT KANPUR
 SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
SENSORS & ACTUATORS Robotics Club (Science and Technology Council, IITK) PRESENTED BY HUMANOID IIT KANPUR October 11th, 2017 WHAT ARE WE GOING TO LEARN!! COMPARISON between Transducers Sensors And Actuators.
THE IMPORTANCE OF PLANNING AND DRAWING IN DESIGN
 PROGRAM OF STUDY ENGR.ROB Standard 1 Essential UNDERSTAND THE IMPORTANCE OF PLANNING AND DRAWING IN DESIGN The student will understand and implement the use of hand sketches and computer-aided drawing
PROGRAM OF STUDY ENGR.ROB Standard 1 Essential UNDERSTAND THE IMPORTANCE OF PLANNING AND DRAWING IN DESIGN The student will understand and implement the use of hand sketches and computer-aided drawing
Industrial Automation Training Academy. Arduino, LabVIEW & PLC Training Programs Duration: 6 Months (180 ~ 240 Hours)
") nfi Industrial Automation Training Academy Presents Arduino, LabVIEW & PLC Training Programs Duration: 6 Months (180 ~ 240 Hours) For: Electronics & Communication Engineering Electrical Engineering Instrumentation
nfi Industrial Automation Training Academy Presents Arduino, LabVIEW & PLC Training Programs Duration: 6 Months (180 ~ 240 Hours) For: Electronics & Communication Engineering Electrical Engineering Instrumentation
Control of the Robot, Using the Teach Pendant
 Exercise 1-2 Control of the Robot, Using the Teach Pendant EXERCISE OBJECTIVE In the first part of this exercise, you will use the optional Teach Pendant to change the coordinates of each robot's articulation,
Exercise 1-2 Control of the Robot, Using the Teach Pendant EXERCISE OBJECTIVE In the first part of this exercise, you will use the optional Teach Pendant to change the coordinates of each robot's articulation,
AUTOMATIC RESISTOR COLOUR CODING DETECTION & ALLOCATION
 AUTOMATIC RESISTOR COLOUR CODING DETECTION & ALLOCATION Abin Thomas 1, Arun Babu 2, Prof. Raji A 3 Electronics Engineering, College of Engineering Adoor (India) ABSTRACT In this modern world, the use of
AUTOMATIC RESISTOR COLOUR CODING DETECTION & ALLOCATION Abin Thomas 1, Arun Babu 2, Prof. Raji A 3 Electronics Engineering, College of Engineering Adoor (India) ABSTRACT In this modern world, the use of
Android Phone Based Assistant System for Handicapped/Disabled/Aged People
 IJIRST International Journal for Innovative Research in Science & Technology Volume 3 Issue 10 March 2017 ISSN (online): 2349-6010 Android Phone Based Assistant System for Handicapped/Disabled/Aged People
IJIRST International Journal for Innovative Research in Science & Technology Volume 3 Issue 10 March 2017 ISSN (online): 2349-6010 Android Phone Based Assistant System for Handicapped/Disabled/Aged People
Simple Path Planning Algorithm for Two-Wheeled Differentially Driven (2WDD) Soccer Robots
 Soccer Robots") Simple Path Planning Algorithm for Two-Wheeled Differentially Driven (2WDD) Soccer Robots Gregor Novak 1 and Martin Seyr 2 1 Vienna University of Technology, Vienna, Austria novak@bluetechnix.at 2 Institute
Simple Path Planning Algorithm for Two-Wheeled Differentially Driven (2WDD) Soccer Robots Gregor Novak 1 and Martin Seyr 2 1 Vienna University of Technology, Vienna, Austria novak@bluetechnix.at 2 Institute
EE-110 Introduction to Engineering & Laboratory Experience Saeid Rahimi, Ph.D. Labs Introduction to Arduino
 EE-110 Introduction to Engineering & Laboratory Experience Saeid Rahimi, Ph.D. Labs 10-11 Introduction to Arduino In this lab we will introduce the idea of using a microcontroller as a tool for controlling
EE-110 Introduction to Engineering & Laboratory Experience Saeid Rahimi, Ph.D. Labs 10-11 Introduction to Arduino In this lab we will introduce the idea of using a microcontroller as a tool for controlling
VEX Robotics Platform and ROBOTC Software. Introduction
 VEX Robotics Platform and ROBOTC Software Introduction VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem VEX Structure Subsystem forms the base of every robot Contains square
VEX Robotics Platform and ROBOTC Software Introduction VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem VEX Structure Subsystem forms the base of every robot Contains square
Arduino Control of Tetrix Prizm Robotics. Motors and Servos Introduction to Robotics and Engineering Marist School
 Arduino Control of Tetrix Prizm Robotics Motors and Servos Introduction to Robotics and Engineering Marist School Motor or Servo? Motor Faster revolution but less Power Tetrix 12 Volt DC motors have a
Arduino Control of Tetrix Prizm Robotics Motors and Servos Introduction to Robotics and Engineering Marist School Motor or Servo? Motor Faster revolution but less Power Tetrix 12 Volt DC motors have a
introduction to Digital Electronics Install the Arduino IDE on your laptop if you haven t already!
 introduction to Digital Electronics Install the Arduino IDE 1.8.5 on your laptop if you haven t already! Electronics can add interactivity! Any sufficiently advanced technology is indistinguishable from
introduction to Digital Electronics Install the Arduino IDE 1.8.5 on your laptop if you haven t already! Electronics can add interactivity! Any sufficiently advanced technology is indistinguishable from
Introduction to the VEX Robotics Platform and ROBOTC Software
 Introduction to the VEX Robotics Platform and ROBOTC Software Computer Integrated Manufacturing 2013 Project Lead The Way, Inc. VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem
Introduction to the VEX Robotics Platform and ROBOTC Software Computer Integrated Manufacturing 2013 Project Lead The Way, Inc. VEX Robotics Platform: Testbed for Learning Programming VEX Structure Subsystem