from AutoMoDe to the Demiurge
|
|
|
- Alexis Gibson
- 5 years ago
- Views:
Transcription
1 INFO-H-414: Swarm Intelligence Automatic Design of Robot Swarms from AutoMoDe to the Demiurge IRIDIA's recent and forthcoming research on the automatic design of robot swarms Mauro Birattari IRIDIA, Université libre de Bruxelles
2 outline introductory concepts definitions working hypothesis and idea from classical ER to AutoMoDe AutoMoDe-vanilla and AutoMoDe-chocolate towards the Demiurge
3 swarm robotics introductory concepts in swarm robotics a mission is entrusted to a large group of robots a swarm is autonomous and self-organized: - no leader robot or external infrastructures a swarm is highly redundant - homogeneous of heterogeneous but nobody is indispensable robots are capable of local perception and communication only - each robot interacts with few neighbours and is unaffected by swarm size robots operate in parallel on multiple tasks - they switch from task to task in an autonomous and self-organized way autonomy, self-organization, redundancy, locality, and parallel execution promote fault tolerance, scalability, and flexibility


4 introductory concepts state of the art and limitations self-organization is viable no general design methodology swarms are mostly designed by hand via trial and error - high costs - not predictable/repeatable - no guarantees the lack of an engineering methodology prevents real-world applications


5 introductory concepts the design challenge in swarm robotics design the individual to obtain desired swarm-level properties
 of neural network are obtained via")
6 introductory concepts evolutionary robotics robots are controlled by neural networks that map sensor readings to control actions parameters (and possibly structure) of neural network are obtained via evolution

7 shortcomings of ER from an engineer s perspective introductory concepts focus on research questions relevant to biology rather than engineering unclear methodology concerning role of experimenter
8 definitions offline automatic design design phase in simulation online automatic design vs continuous design during operation in target environment operation phase in target environment not an exhaustive taxonomy: hybrids and variants are possible
9 one shot design process offline automatic design iterated design process definitions specifications specifications objective function objective function vs design via optimization in simulation design via optimization in simulation assessment control software control software
10 definitions overall problem model class of tasks sample a task design in simulation operation in real world iterate over and over
11 working hypothesis and idea offline automatic design machine learning design in simulation reality gap whp training set generalization operation in real world test set


12 working hypothesis and idea offline automatic design machine learning reality gap whp generalization idea: handle reality gap as a generalization problem
13 from classical ER to AutoMoDe a bias/variance dilemma? a possible explanation of the inability to successfully cross the reality gap shown by some/many robot swarms obtained via classical ER: NN could be too powerful: low bias / high variance they could overfit idiosyncrasies of simulator
14 from classical ER to AutoMoDe AutoMoDe limit power of control software by injecting bias finite state machines obtained by assembling and fine-tuning preexisting parametric modules modules are task independent : defined a priori on the basis of robot capabilities (an example follows )
![AutoMoDe-vanilla AutoMoDe vanilla RM1: a reference model of the e-puck (subset of sensors/actuators) sensors/actuators proximity light variables proxi [0,1] & qi with i {1,2,,8}](/docs-images/94/119283304/images/15-0.jpg "lighti [0,1] & qi with i {1,2,,8} ground gndi {0,.5,1} with i {1,2,3} range and bearing wheels n N, rm, & bm with m {1,2,,n} vl & vr [-V,+V] with V = 0.")
15 AutoMoDe-vanilla AutoMoDe vanilla RM1: a reference model of the e-puck (subset of sensors/actuators) sensors/actuators proximity light variables proxi [0,1] & qi with i {1,2,,8} lighti [0,1] & qi with i {1,2,,8} ground gndi {0,.5,1} with i {1,2,3} range and bearing wheels n N, rm, & bm with m {1,2,,n} vl & vr [-V,+V] with V = 0.16 m/s period of control cycle: 100 ms
16 AutoMoDe-vanilla AutoMoDe vanilla parametric behaviors & transition conditions behaviors exploration stop conditions black-floor gray-floor attraction = 5 black-floor β = 1 phototaxis anti-phototaxis attraction white-floor neighbor-count inverted-neighbor-count gray-floor β = 1 stop repulsion fixed-probability fixed-probability β = 0.25 example: aggregation
17 AutoMoDe-vanilla AutoMoDe vanilla optimization algorithm: F-Race (Birattari et al., 2002) sample candidate designs candidate designs iteratively evaluate them drop dominated ones iterations stop when one survives or evaluation budget depletes
18 AutoMoDe-vanilla experiments design in simulation with ARGoS tests with swarm of 20 e-puck robots two tasks: aggregation and foraging three budget levels: 10k, 50k, and 200k two design methods: vanilla and EvoStick no modification whatsoever allowed to adapt design methods to task or budget level!!!
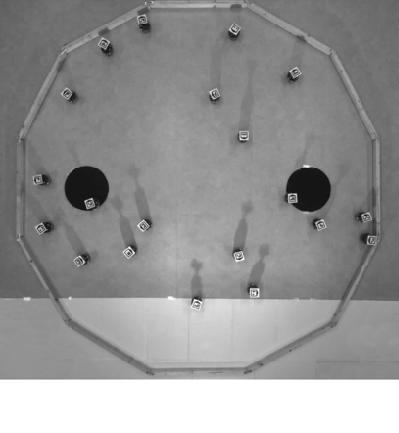
19 AutoMoDe-vanilla aggregation foraging F = max(na,nb)/n F = No
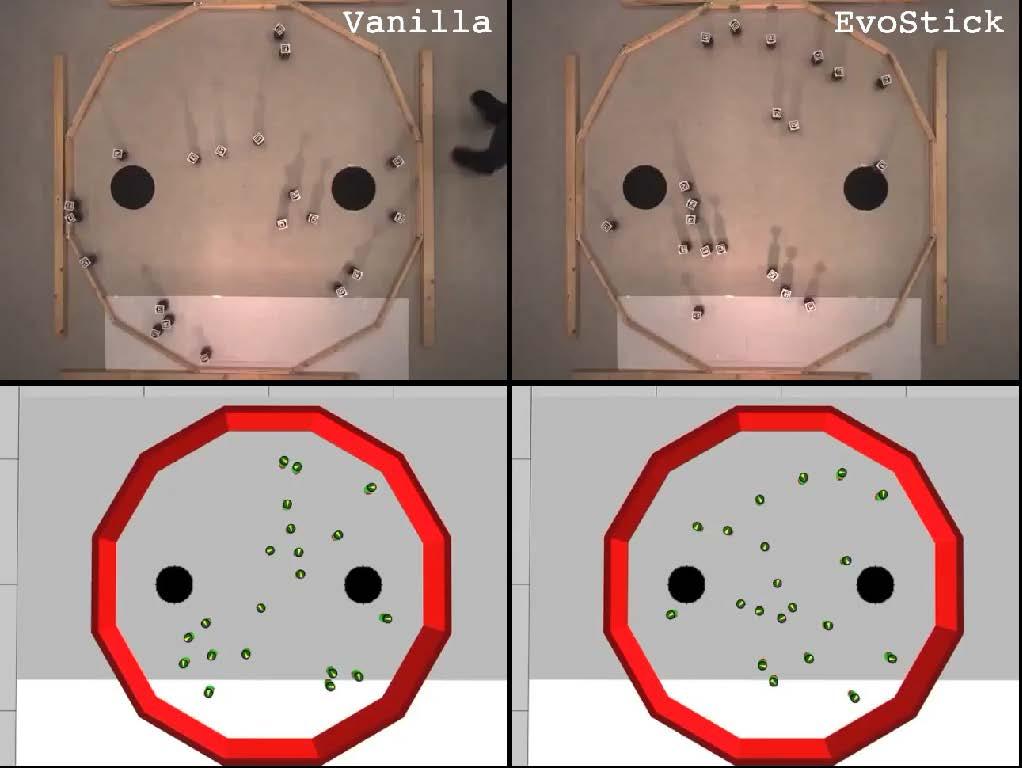
20 results: aggregation AutoMoDe-vanilla Wide boxes: robots Narrow boxes: simulation Objective function AutoMoDe Vanilla EvoStick 10k 50k 200k AutoMoDe Vanilla EvoStick AutoMoDe Vanilla EvoStick the higher, the better EvoStick s performance is good in simulation but drops in robot experiments
21 AutoMoDe-vanilla results: foraging Wide boxes: robots Narrow boxes: simulation Objective function k 50k 200k the higher, the better AutoMoDe Vanilla EvoStick AutoMoDe Vanilla EvoStick AutoMoDe Vanilla EvoStick EvoStick is excellent in simulation but poor in robot experiments. The gap grows with the budget
22
23 AutoMoDe-vanilla remarks vanilla s modules proved to be general enough to produce control software for two different tasks whether they are general enough to produce control software for any tasks that could be possibly tackled by robots described by reference model RM1 is an empirical question
24 AutoMoDe-vanilla experiment with humans 5 human designers PhD students at IRIDIA in swarm robotics proficient in ARGoS and acquainted with the e-puck unaware of AutoMoDe-vanilla and its functioning were asked to conceive a task compatibly with given reference model and with constraint on arena, possible obstacles, ground color, etc solve another task by assembling vanilla s modules solve yet another task by direct C++ programming
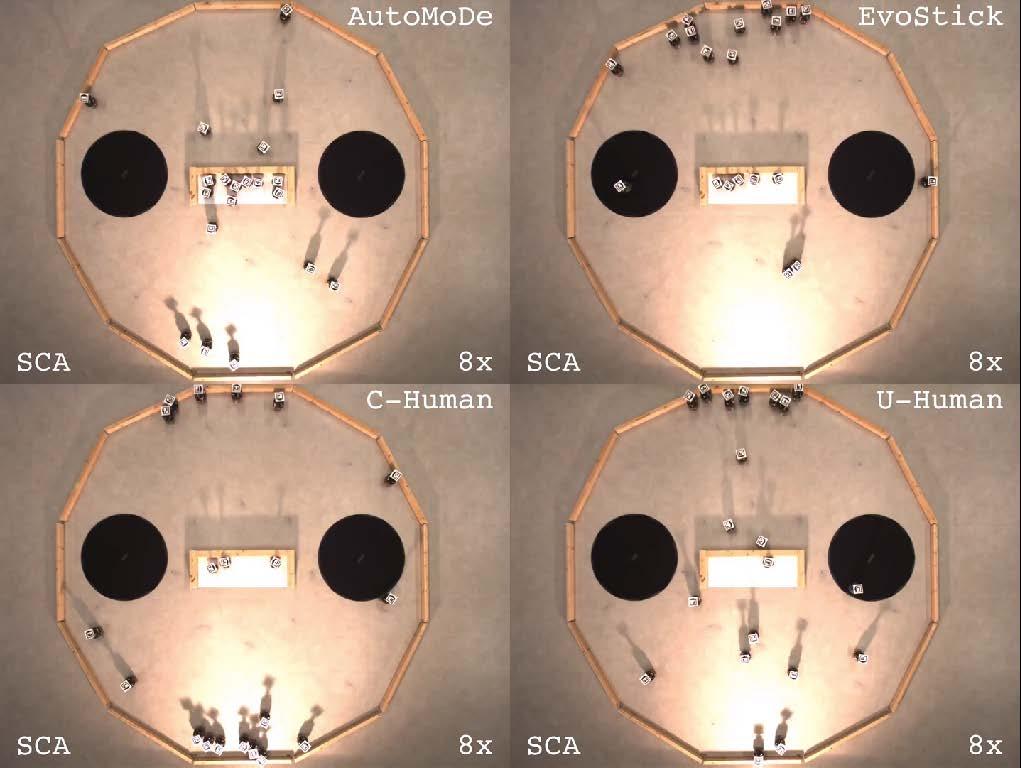
25 AutoMoDe-vanilla experiments design in simulation with ARGoS tests with swarm of 20 e-puck robots budget: 200k for automatic methods (~2h30) and 4h for humans 5 tasks proposed by human designers: shelter with constrained access, largest covering network, coverage with forbidden areas, surface and perimeter coverage, aggregation with ambient cues 4 design methods: vanilla, EvoStick, C Human, U Human no modification whatsoever allowed to adapt the two automatic design methods to new tasks!!!
26 AutoMoDe-vanilla task and results Wide boxes: robots Narrow boxes: simulation Objective fuction the higher, the better F = T N(t) Vanilla EvoStick U Human C Human SCA shelter with constrained access: robots should aggregate in the white shelter
27 Vanilla
28 AutoMoDe-vanilla task and results Wide boxes: robots Narrow boxes: simulation Objective fuction the higher, the better F = AC(T) Vanilla EvoStick U Human C Human LCN largest covering network: robots should cover the largest possible area while maintaining connection with one another
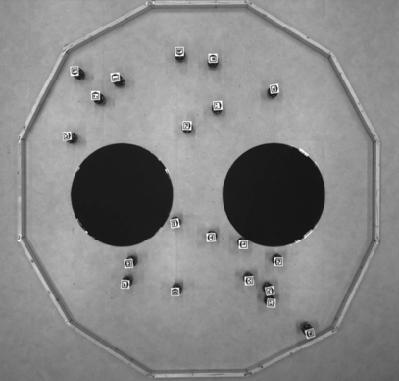
29 AutoMoDe-vanilla task and results Wide boxes: robots Narrow boxes: simulation F = E[d(T)] Objective fuction Vanilla EvoStick U Human C Human the lower, the better CFA coverage with forbidden areas: robot should cover the arena except the forbidden black areas
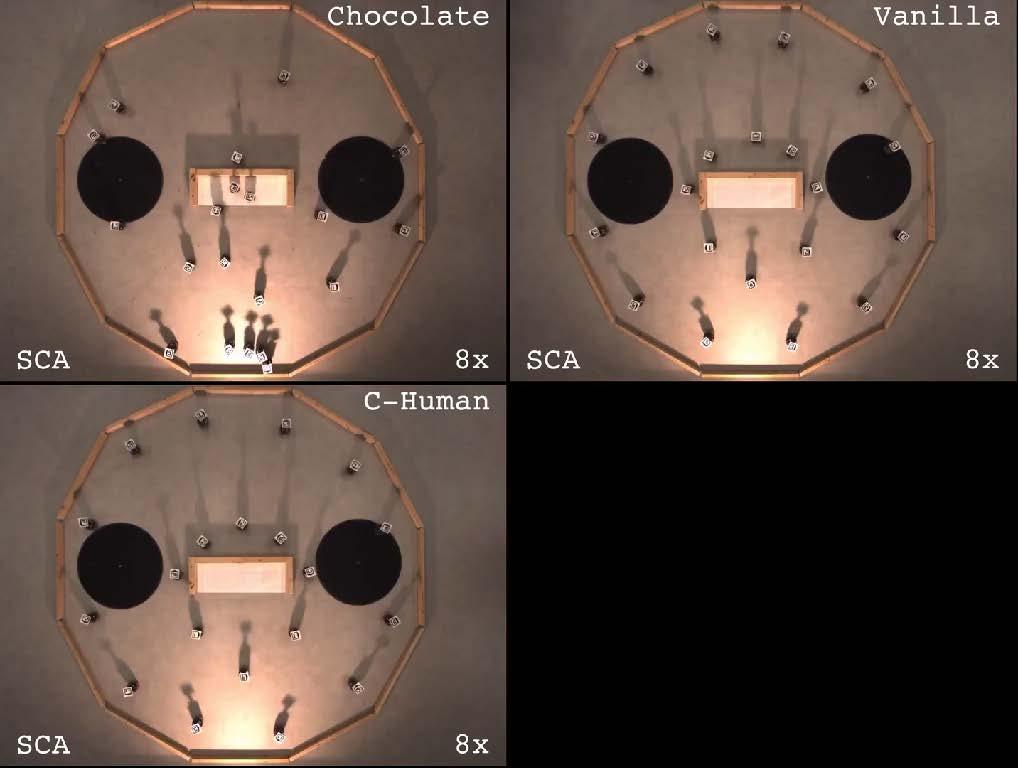
30 AutoMoDe-vanilla task and results Wide boxes: robots Narrow boxes: simulation Objective fuction x x x x the lower, the better F = E[da(T)]/ca + E[dp(T)]/cp Vanilla EvoStick U Human C Human SPC surface and perimeter coverage: robot should cover the surface of the white square and the perimeter of the black circle
31 AutoMoDe-vanilla task and results Wide boxes: robots Narrow boxes: simulation Objective fuction the higher, the better F = T Nb(t) Vanilla EvoStick U Human C Human AAC aggregation with ambient cues: robot should aggregate in the black region
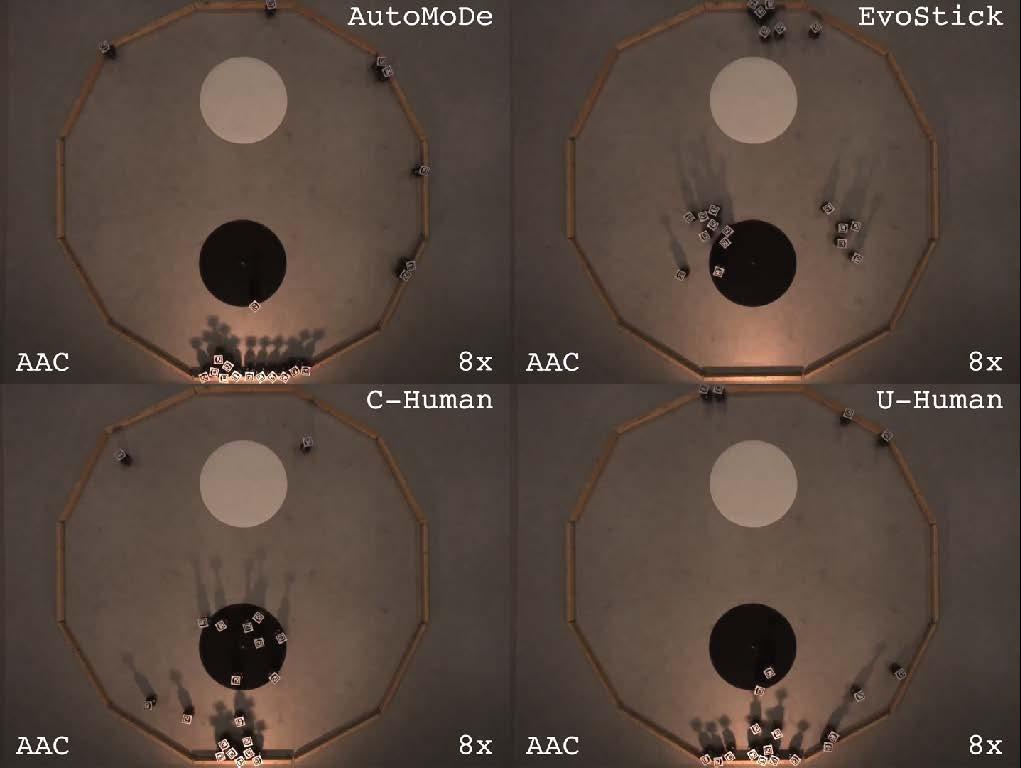
32 Vanilla
33 AutoMoDe-vanilla aggregate results Vanilla EvoStick U-Human C-Human analysis based on Friedman test the lower, the better vanilla confirms better that EvoStick also on new tasks rank C-Human is the best: vanilla s modules are good but F Race is unable to fully exploit their potential humans experience the reality gap as well as automatic methods injecting bias (by constraining the human to the given modules) improves the ability to cross the reality gap also for humans
34 AutoMoDe-chocolate AutoMoDe chocolate same modules of vanilla (and C-Human), but new optimization algorithm: iterated F-Race (Balaprakash et al., 2002) sample candidate designs run F-Race sample around survivors run F-Race and iterate sample initial candidate designs sample around survivors sample around survivors iterate stop when budget depletes

35 AutoMoDe-Chocolate task and results Wide boxes: robots Narrow boxes: simulation F = T N(t) Vanilla Chocolate C Human the higher, the better SCA shelter with constrained access: robots should aggregate in the white shelter
36
 Vanilla Chocolate C Human LCN largest covering network: robots should cover the largest possible area")
37 AutoMoDe-Chocolate task and results Wide boxes: robots Narrow boxes: simulation the higher, the better F = AC(T) Vanilla Chocolate C Human LCN largest covering network: robots should cover the largest possible area while maintaining connection with one another
![AutoMoDe-Chocolate task and results Wide boxes: robots Narrow boxes: simulation F = E[d(T)] 0.20 0.24 0.28 0.](/docs-images/94/119283304/images/38-0.jpg "32 Vanilla Chocolate C Human the lower, the better CFA coverage with forbidden areas: robot should cover the arena except the")
38 AutoMoDe-Chocolate task and results Wide boxes: robots Narrow boxes: simulation F = E[d(T)] Vanilla Chocolate C Human the lower, the better CFA coverage with forbidden areas: robot should cover the arena except the forbidden black areas
![AutoMoDe-Chocolate task and results Wide boxes: robots Narrow boxes: simulation 2 3 4 5 6 the lower, the better F = E[da(T)]/ca + E[dp(T)]/cp](/docs-images/94/119283304/images/39-0.jpg "Vanilla Chocolate C Human SPC surface and perimeter coverage: robot should cover the surface of the white square and the perimeter of the black")
39 AutoMoDe-Chocolate task and results Wide boxes: robots Narrow boxes: simulation the lower, the better F = E[da(T)]/ca + E[dp(T)]/cp Vanilla Chocolate C Human SPC surface and perimeter coverage: robot should cover the surface of the white square and the perimeter of the black circle

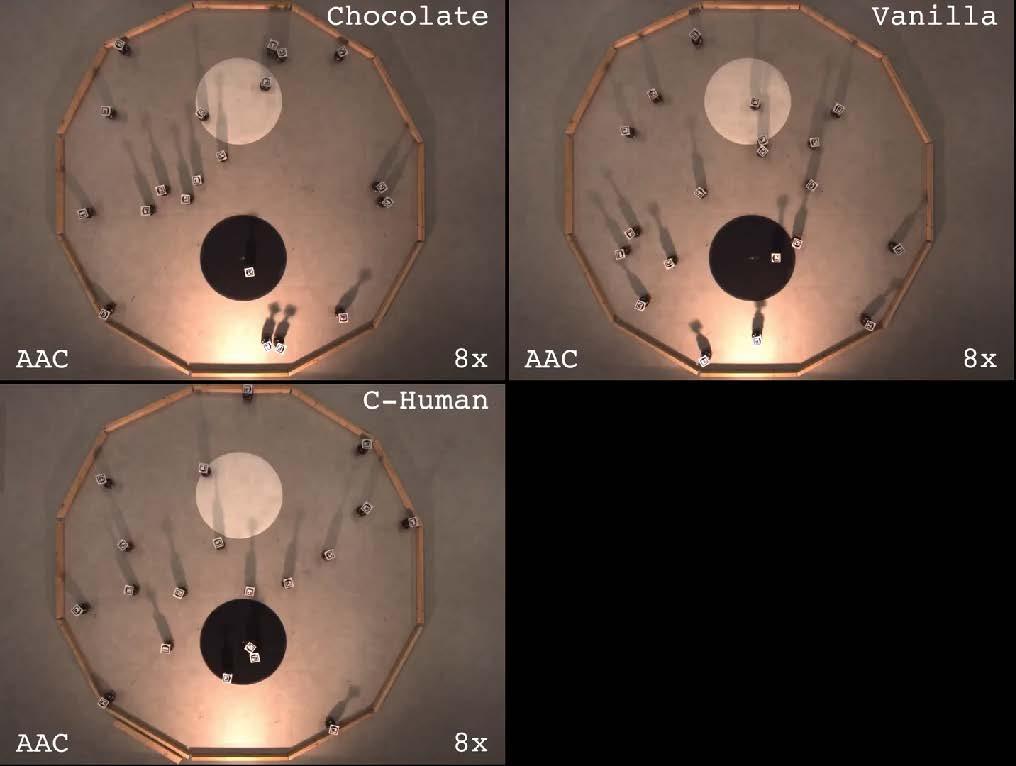
40 AutoMoDe-Chocolate task and results Wide boxes: robots Narrow boxes: simulation F = T Nb(t) Vanilla Chocolate C Human the higher, the better AAC aggregation with ambient cues: robot should aggregate in the black region
41
42 AutoMoDe-Chocolate aggregate results analysis based on Friedman test Vanilla C-Human Chocolate the lower, the better rank chocolate improves over vanilla chocolate performs better than C-Human
43 conclusions automatic design of robot swarms in the light of machine learning concepts AutoMoDe is a promising approach AutoMoDe-chocolate performed better that human designers some innovative elements in the empirical studies





44 DEMIURGE Automatic Design of Robot Swarms
 the Demiurge does not create designs from")
45 towards the Demiurge Demiurge: an intelligent system that designs robot swarms in an integrated and automatic way starting from requirements expressed in an appropriate specification language, the Demiurge designs hardware and control software Plato s Demiurge in a drawing by the English pre-roman9c poet and illustrator William Blake ( ) the Demiurge does not create designs from scratch: it operates on preexisting software and hardware modules











46 contributors Gianpiero Francesca Manuele Brambilla Arne Brutschy Lorenzo Garattoni Roman Miletitch Gaëtan Podevijn Andreagiovanni Reina Touraj Soleymani Mattia Salvaro Carlo Pinciroli Franco Mascia Vito Trianni
AutoMoDe-Chocolate: automatic design of control software for robot swarms
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle AutoMoDe-Chocolate: automatic design of control software for robot swarms G. Francesca,
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle AutoMoDe-Chocolate: automatic design of control software for robot swarms G. Francesca,
AutoMoDe-Chocolate: automatic design of control software for robot swarms
 DOI 10.1007/s11721-015-0107-9 AutoMoDe-Chocolate: automatic design of control software for robot swarms Gianpiero Francesca 1 Manuele Brambilla 1 Arne Brutschy 1 Lorenzo Garattoni 1 Roman Miletitch 1 Gaëtan
DOI 10.1007/s11721-015-0107-9 AutoMoDe-Chocolate: automatic design of control software for robot swarms Gianpiero Francesca 1 Manuele Brambilla 1 Arne Brutschy 1 Lorenzo Garattoni 1 Roman Miletitch 1 Gaëtan
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization
 Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Socially-Mediated Negotiation for Obstacle Avoidance in Collective Transport
 Socially-Mediated Negotiation for Obstacle Avoidance in Collective Transport Eliseo Ferrante, Manuele Brambilla, Mauro Birattari and Marco Dorigo IRIDIA, CoDE, Université Libre de Bruxelles, Brussels,
Socially-Mediated Negotiation for Obstacle Avoidance in Collective Transport Eliseo Ferrante, Manuele Brambilla, Mauro Birattari and Marco Dorigo IRIDIA, CoDE, Université Libre de Bruxelles, Brussels,
Evolving communicating agents that integrate information over time: a real robot experiment
 Evolving communicating agents that integrate information over time: a real robot experiment Christos Ampatzis, Elio Tuci, Vito Trianni and Marco Dorigo IRIDIA - Université Libre de Bruxelles, Bruxelles,
Evolving communicating agents that integrate information over time: a real robot experiment Christos Ampatzis, Elio Tuci, Vito Trianni and Marco Dorigo IRIDIA - Université Libre de Bruxelles, Bruxelles,
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Look out! : Socially-Mediated Obstacle Avoidance in Collective Transport Eliseo
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Look out! : Socially-Mediated Obstacle Avoidance in Collective Transport Eliseo
Evolving Neural Mechanisms for an Iterated Discrimination Task: A Robot Based Model
 Evolving Neural Mechanisms for an Iterated Discrimination Task: A Robot Based Model Elio Tuci, Christos Ampatzis, and Marco Dorigo IRIDIA, Université Libre de Bruxelles - Bruxelles - Belgium {etuci, campatzi,
Evolving Neural Mechanisms for an Iterated Discrimination Task: A Robot Based Model Elio Tuci, Christos Ampatzis, and Marco Dorigo IRIDIA, Université Libre de Bruxelles - Bruxelles - Belgium {etuci, campatzi,
Distributed Intelligent Systems W11 Machine-Learning Methods Applied to Distributed Robotic Systems
 Distributed Intelligent Systems W11 Machine-Learning Methods Applied to Distributed Robotic Systems 1 Outline Revisiting expensive optimization problems Additional experimental evidence Noise-resistant
Distributed Intelligent Systems W11 Machine-Learning Methods Applied to Distributed Robotic Systems 1 Outline Revisiting expensive optimization problems Additional experimental evidence Noise-resistant
Implicit Fitness Functions for Evolving a Drawing Robot
 Implicit Fitness Functions for Evolving a Drawing Robot Jon Bird, Phil Husbands, Martin Perris, Bill Bigge and Paul Brown Centre for Computational Neuroscience and Robotics University of Sussex, Brighton,
Implicit Fitness Functions for Evolving a Drawing Robot Jon Bird, Phil Husbands, Martin Perris, Bill Bigge and Paul Brown Centre for Computational Neuroscience and Robotics University of Sussex, Brighton,
Swarm Robotics: A Review from the Swarm Engineering Perspective
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Swarm Robotics: A Review from the Swarm Engineering Perspective M. Brambilla,
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Swarm Robotics: A Review from the Swarm Engineering Perspective M. Brambilla,
CSCI 445 Laurent Itti. Group Robotics. Introduction to Robotics L. Itti & M. J. Mataric 1
 Introduction to Robotics CSCI 445 Laurent Itti Group Robotics Introduction to Robotics L. Itti & M. J. Mataric 1 Today s Lecture Outline Defining group behavior Why group behavior is useful Why group behavior
Introduction to Robotics CSCI 445 Laurent Itti Group Robotics Introduction to Robotics L. Itti & M. J. Mataric 1 Today s Lecture Outline Defining group behavior Why group behavior is useful Why group behavior
Towards Autonomous Task Partitioning in Swarm Robotics
 UNIVERSITÉ LIBRE DE BRUXELLES Ecole Polytechnique de Bruxelles IRIDIA - Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Towards Autonomous Task Partitioning
UNIVERSITÉ LIBRE DE BRUXELLES Ecole Polytechnique de Bruxelles IRIDIA - Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Towards Autonomous Task Partitioning
Enabling research on complex tasks in swarm robotics
 Enabling research on complex tasks in swarm robotics Novel conceptual and practical tools Arne Brutschy Ph.D. Thesis Promoteur de Thèse: Prof. Marco Dorigo Co-promoteur de Thèse: Prof. Mauro Birattari
Enabling research on complex tasks in swarm robotics Novel conceptual and practical tools Arne Brutschy Ph.D. Thesis Promoteur de Thèse: Prof. Marco Dorigo Co-promoteur de Thèse: Prof. Mauro Birattari
Behaviour Patterns Evolution on Individual and Group Level. Stanislav Slušný, Roman Neruda, Petra Vidnerová. CIMMACS 07, December 14, Tenerife
 Behaviour Patterns Evolution on Individual and Group Level Stanislav Slušný, Roman Neruda, Petra Vidnerová Department of Theoretical Computer Science Institute of Computer Science Academy of Science of
Behaviour Patterns Evolution on Individual and Group Level Stanislav Slušný, Roman Neruda, Petra Vidnerová Department of Theoretical Computer Science Institute of Computer Science Academy of Science of
The TAM: abstracting complex tasks in swarm robotics research
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle The TAM: abstracting complex tasks in swarm robotics research A. Brutschy, L.
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle The TAM: abstracting complex tasks in swarm robotics research A. Brutschy, L.
Socially-Mediated Negotiation for Obstacle Avoidance in Collective Transport
 Socially-Mediated Negotiation for Obstacle Avoidance in Collective Transport Eliseo Ferrante, Manuele Brambilla, Mauro Birattari, and Marco Dorigo Abstract. In this paper, we present a novel method for
Socially-Mediated Negotiation for Obstacle Avoidance in Collective Transport Eliseo Ferrante, Manuele Brambilla, Mauro Birattari, and Marco Dorigo Abstract. In this paper, we present a novel method for
Self-organised Feedback in Human Swarm Interaction
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Self-organised Feedback in Human Swarm Interaction G. Podevijn, R. O Grady, and
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Self-organised Feedback in Human Swarm Interaction G. Podevijn, R. O Grady, and
Evolution of Acoustic Communication Between Two Cooperating Robots
 Evolution of Acoustic Communication Between Two Cooperating Robots Elio Tuci and Christos Ampatzis CoDE-IRIDIA, Université Libre de Bruxelles - Bruxelles - Belgium {etuci,campatzi}@ulb.ac.be Abstract.
Evolution of Acoustic Communication Between Two Cooperating Robots Elio Tuci and Christos Ampatzis CoDE-IRIDIA, Université Libre de Bruxelles - Bruxelles - Belgium {etuci,campatzi}@ulb.ac.be Abstract.
Distributed Area Coverage Using Robot Flocks
 Distributed Area Coverage Using Robot Flocks Ke Cheng, Prithviraj Dasgupta and Yi Wang Computer Science Department University of Nebraska, Omaha, NE, USA E-mail: {kcheng,ywang,pdasgupta}@mail.unomaha.edu
Distributed Area Coverage Using Robot Flocks Ke Cheng, Prithviraj Dasgupta and Yi Wang Computer Science Department University of Nebraska, Omaha, NE, USA E-mail: {kcheng,ywang,pdasgupta}@mail.unomaha.edu
Kilogrid: a Modular Virtualization Environment for the Kilobot Robot
 Kilogrid: a Modular Virtualization Environment for the Kilobot Robot Anthony Antoun 1, Gabriele Valentini 1, Etienne Hocquard 2, Bernát Wiandt 3, Vito Trianni 4 and Marco Dorigo 1 Abstract We introduce
Kilogrid: a Modular Virtualization Environment for the Kilobot Robot Anthony Antoun 1, Gabriele Valentini 1, Etienne Hocquard 2, Bernát Wiandt 3, Vito Trianni 4 and Marco Dorigo 1 Abstract We introduce
Environmental factors promoting the evolution of recruitment strategies in swarms of foraging robots
 Environmental factors promoting the evolution of recruitment strategies in swarms of foraging robots Steven Van Essche 1, Eliseo Ferrante 1, Ali Emre Turgut 2, Rinde Van Lon 3, Tom Holvoet 3, and Tom Wenseleers
Environmental factors promoting the evolution of recruitment strategies in swarms of foraging robots Steven Van Essche 1, Eliseo Ferrante 1, Ali Emre Turgut 2, Rinde Van Lon 3, Tom Holvoet 3, and Tom Wenseleers
Surveillance strategies for autonomous mobile robots. Nicola Basilico Department of Computer Science University of Milan
 Surveillance strategies for autonomous mobile robots Nicola Basilico Department of Computer Science University of Milan Intelligence, surveillance, and reconnaissance (ISR) with autonomous UAVs ISR defines
Surveillance strategies for autonomous mobile robots Nicola Basilico Department of Computer Science University of Milan Intelligence, surveillance, and reconnaissance (ISR) with autonomous UAVs ISR defines
Path formation in a robot swarm
 Swarm Intell (2008) 2: 1 23 DOI 10.1007/s11721-007-0009-6 Path formation in a robot swarm Self-organized strategies to find your way home Shervin Nouyan Alexandre Campo Marco Dorigo Received: 31 January
Swarm Intell (2008) 2: 1 23 DOI 10.1007/s11721-007-0009-6 Path formation in a robot swarm Self-organized strategies to find your way home Shervin Nouyan Alexandre Campo Marco Dorigo Received: 31 January
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
A Self-Adaptive Communication Strategy for Flocking in Stationary and Non-Stationary Environments
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle A Self-Adaptive Communication Strategy for Flocking in Stationary and Non-Stationary
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle A Self-Adaptive Communication Strategy for Flocking in Stationary and Non-Stationary
Traffic Control for a Swarm of Robots: Avoiding Target Congestion
 Traffic Control for a Swarm of Robots: Avoiding Target Congestion Leandro Soriano Marcolino and Luiz Chaimowicz Abstract One of the main problems in the navigation of robotic swarms is when several robots
Traffic Control for a Swarm of Robots: Avoiding Target Congestion Leandro Soriano Marcolino and Luiz Chaimowicz Abstract One of the main problems in the navigation of robotic swarms is when several robots
On The Role of the Multi-Level and Multi- Scale Nature of Behaviour and Cognition
 On The Role of the Multi-Level and Multi- Scale Nature of Behaviour and Cognition Stefano Nolfi Laboratory of Autonomous Robotics and Artificial Life Institute of Cognitive Sciences and Technologies, CNR
On The Role of the Multi-Level and Multi- Scale Nature of Behaviour and Cognition Stefano Nolfi Laboratory of Autonomous Robotics and Artificial Life Institute of Cognitive Sciences and Technologies, CNR
Robots in the Loop: Supporting an Incremental Simulation-based Design Process
 s in the Loop: Supporting an Incremental -based Design Process Xiaolin Hu Computer Science Department Georgia State University Atlanta, GA, USA xhu@cs.gsu.edu Abstract This paper presents the results of
s in the Loop: Supporting an Incremental -based Design Process Xiaolin Hu Computer Science Department Georgia State University Atlanta, GA, USA xhu@cs.gsu.edu Abstract This paper presents the results of
Human-Swarm Interaction
 Human-Swarm Interaction a brief primer Andreas Kolling irobot Corp. Pasadena, CA Swarm Properties - simple and distributed - from the operator s perspective - distributed algorithms and information processing
Human-Swarm Interaction a brief primer Andreas Kolling irobot Corp. Pasadena, CA Swarm Properties - simple and distributed - from the operator s perspective - distributed algorithms and information processing
Online Evolution for Cooperative Behavior in Group Robot Systems
 282 International Dong-Wook Journal of Lee, Control, Sang-Wook Automation, Seo, and Systems, Kwee-Bo vol. Sim 6, no. 2, pp. 282-287, April 2008 Online Evolution for Cooperative Behavior in Group Robot
282 International Dong-Wook Journal of Lee, Control, Sang-Wook Automation, Seo, and Systems, Kwee-Bo vol. Sim 6, no. 2, pp. 282-287, April 2008 Online Evolution for Cooperative Behavior in Group Robot
Formal methods for the design and analysis of robot swarms
 UNIVERSITÉ LIBRE DE BRUXELLES Ecole Polytechnique de Bruxelles IRIDIA - Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Formal methods for the design and analysis
UNIVERSITÉ LIBRE DE BRUXELLES Ecole Polytechnique de Bruxelles IRIDIA - Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Formal methods for the design and analysis
Evolution of communication-based collaborative behavior in homogeneous robots
 Evolution of communication-based collaborative behavior in homogeneous robots Onofrio Gigliotta 1 and Marco Mirolli 2 1 Natural and Artificial Cognition Lab, University of Naples Federico II, Napoli, Italy
Evolution of communication-based collaborative behavior in homogeneous robots Onofrio Gigliotta 1 and Marco Mirolli 2 1 Natural and Artificial Cognition Lab, University of Naples Federico II, Napoli, Italy
Biologically Inspired Embodied Evolution of Survival
 Biologically Inspired Embodied Evolution of Survival Stefan Elfwing 1,2 Eiji Uchibe 2 Kenji Doya 2 Henrik I. Christensen 1 1 Centre for Autonomous Systems, Numerical Analysis and Computer Science, Royal
Biologically Inspired Embodied Evolution of Survival Stefan Elfwing 1,2 Eiji Uchibe 2 Kenji Doya 2 Henrik I. Christensen 1 1 Centre for Autonomous Systems, Numerical Analysis and Computer Science, Royal
Fault Detection in Autonomous Robots
 Université Libre de Bruxelles Faculté des Sciences Appliquées Année académique 2007-2008 Fault Detection in Autonomous Robots Endogenous fault detection through fault injection and learning - exogenous
Université Libre de Bruxelles Faculté des Sciences Appliquées Année académique 2007-2008 Fault Detection in Autonomous Robots Endogenous fault detection through fault injection and learning - exogenous
E X O G E N O U S FA U LT D E T E C T I O N I N S WA R M R O B O T I C S Y S T E M S
 E X O G E N O U S FA U LT D E T E C T I O N I N S WA R M R O B O T I C S Y S T E M S A N A P P R O A C H B A S E D O N I N T E R N A L M O D E L S alan gregory millard Doctor of Philosophy University of
E X O G E N O U S FA U LT D E T E C T I O N I N S WA R M R O B O T I C S Y S T E M S A N A P P R O A C H B A S E D O N I N T E R N A L M O D E L S alan gregory millard Doctor of Philosophy University of
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Evolution of Signaling in a Multi-Robot System: Categorization and Communication
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Evolution of Signaling in a Multi-Robot System: Categorization and Communication
Multi robot Team Formation for Distributed Area Coverage. Raj Dasgupta Computer Science Department University of Nebraska, Omaha
 Multi robot Team Formation for Distributed Area Coverage Raj Dasgupta Computer Science Department University of Nebraska, Omaha C MANTIC Lab Collaborative Multi AgeNt/Multi robot Technologies for Intelligent
Multi robot Team Formation for Distributed Area Coverage Raj Dasgupta Computer Science Department University of Nebraska, Omaha C MANTIC Lab Collaborative Multi AgeNt/Multi robot Technologies for Intelligent
Keywords Multi-Agent, Distributed, Cooperation, Fuzzy, Multi-Robot, Communication Protocol. Fig. 1. Architecture of the Robots.
 1 José Manuel Molina, Vicente Matellán, Lorenzo Sommaruga Laboratorio de Agentes Inteligentes (LAI) Departamento de Informática Avd. Butarque 15, Leganés-Madrid, SPAIN Phone: +34 1 624 94 31 Fax +34 1
1 José Manuel Molina, Vicente Matellán, Lorenzo Sommaruga Laboratorio de Agentes Inteligentes (LAI) Departamento de Informática Avd. Butarque 15, Leganés-Madrid, SPAIN Phone: +34 1 624 94 31 Fax +34 1
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Multi-Robot Learning with Particle Swarm Optimization
 Multi-Robot Learning with Particle Swarm Optimization Jim Pugh and Alcherio Martinoli Swarm-Intelligent Systems Group École Polytechnique Fédérale de Lausanne 5 Lausanne, Switzerland {jim.pugh,alcherio.martinoli}@epfl.ch
Multi-Robot Learning with Particle Swarm Optimization Jim Pugh and Alcherio Martinoli Swarm-Intelligent Systems Group École Polytechnique Fédérale de Lausanne 5 Lausanne, Switzerland {jim.pugh,alcherio.martinoli}@epfl.ch
Adaptive Potential Fields Model for Solving Distributed Area Coverage Problem in Swarm Robotics
 Adaptive Potential Fields Model for Solving Distributed Area Coverage Problem in Swarm Robotics Xiangyu Liu and Ying Tan (B) Key Laboratory of Machine Perception (MOE), and Department of Machine Intelligence
Adaptive Potential Fields Model for Solving Distributed Area Coverage Problem in Swarm Robotics Xiangyu Liu and Ying Tan (B) Key Laboratory of Machine Perception (MOE), and Department of Machine Intelligence
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Cooperation through self-assembling in multi-robot systems ELIO TUCI, RODERICH
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Cooperation through self-assembling in multi-robot systems ELIO TUCI, RODERICH
A self-adaptive communication strategy for flocking in stationary and non-stationary environments
 Nat Comput (2014) 13:225 245 DOI 10.1007/s11047-013-9390-9 A self-adaptive communication strategy for flocking in stationary and non-stationary environments Eliseo Ferrante Ali Emre Turgut Alessandro Stranieri
Nat Comput (2014) 13:225 245 DOI 10.1007/s11047-013-9390-9 A self-adaptive communication strategy for flocking in stationary and non-stationary environments Eliseo Ferrante Ali Emre Turgut Alessandro Stranieri
OFFensive Swarm-Enabled Tactics (OFFSET)
") OFFensive Swarm-Enabled Tactics (OFFSET) Dr. Timothy H. Chung, Program Manager Tactical Technology Office Briefing Prepared for OFFSET Proposers Day 1 Why are Swarms Hard: Complexity of Swarms Number Agent
OFFensive Swarm-Enabled Tactics (OFFSET) Dr. Timothy H. Chung, Program Manager Tactical Technology Office Briefing Prepared for OFFSET Proposers Day 1 Why are Swarms Hard: Complexity of Swarms Number Agent
Efficient Decision-Making in a Self-Organizing Robot Swarm: On the Speed Versus Accuracy Trade-Off
 Efficient Decision-Making in a Self-Organizing Robot Swarm: On the Speed Versus Accuracy Trade-Off Gabriele Valentini 1, Heiko Hamann 2 and Marco Dorigo 2 1 IRIDIA, Université Libre de Bruxelles, Brussels,
Efficient Decision-Making in a Self-Organizing Robot Swarm: On the Speed Versus Accuracy Trade-Off Gabriele Valentini 1, Heiko Hamann 2 and Marco Dorigo 2 1 IRIDIA, Université Libre de Bruxelles, Brussels,
Evolution, Self-Organisation and Swarm Robotics
 Evolution, Self-Organisation and Swarm Robotics Vito Trianni 1, Stefano Nolfi 1, and Marco Dorigo 2 1 LARAL research group ISTC, Consiglio Nazionale delle Ricerche, Rome, Italy {vito.trianni,stefano.nolfi}@istc.cnr.it
Evolution, Self-Organisation and Swarm Robotics Vito Trianni 1, Stefano Nolfi 1, and Marco Dorigo 2 1 LARAL research group ISTC, Consiglio Nazionale delle Ricerche, Rome, Italy {vito.trianni,stefano.nolfi}@istc.cnr.it
Task Partitioning in a Robot Swarm: Object Retrieval as a Sequence of Subtasks with Direct Object Transfer
 Task Partitioning in a Robot Swarm: Object Retrieval as a Sequence of Subtasks with Direct Object Transfer Giovanni Pini*, ** Université Libre de Bruxelles Arne Brutschy** Université Libre de Bruxelles
Task Partitioning in a Robot Swarm: Object Retrieval as a Sequence of Subtasks with Direct Object Transfer Giovanni Pini*, ** Université Libre de Bruxelles Arne Brutschy** Université Libre de Bruxelles
Cooperative navigation in robotic swarms
 1 Cooperative navigation in robotic swarms Frederick Ducatelle, Gianni A. Di Caro, Alexander Förster, Michael Bonani, Marco Dorigo, Stéphane Magnenat, Francesco Mondada, Rehan O Grady, Carlo Pinciroli,
1 Cooperative navigation in robotic swarms Frederick Ducatelle, Gianni A. Di Caro, Alexander Förster, Michael Bonani, Marco Dorigo, Stéphane Magnenat, Francesco Mondada, Rehan O Grady, Carlo Pinciroli,
Sorting in Swarm Robots Using Communication-Based Cluster Size Estimation
 Sorting in Swarm Robots Using Communication-Based Cluster Size Estimation Hongli Ding and Heiko Hamann Department of Computer Science, University of Paderborn, Paderborn, Germany hongli.ding@uni-paderborn.de,
Sorting in Swarm Robots Using Communication-Based Cluster Size Estimation Hongli Ding and Heiko Hamann Department of Computer Science, University of Paderborn, Paderborn, Germany hongli.ding@uni-paderborn.de,
Distributed Task Allocation in Swarms. of Robots
 Distributed Task Allocation in Swarms Aleksandar Jevtić Robosoft Technopole d'izarbel, F-64210 Bidart, France of Robots Diego Andina Group for Automation in Signals and Communications E.T.S.I.T.-Universidad
Distributed Task Allocation in Swarms Aleksandar Jevtić Robosoft Technopole d'izarbel, F-64210 Bidart, France of Robots Diego Andina Group for Automation in Signals and Communications E.T.S.I.T.-Universidad
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Evolved homogeneous neuro-controllers for robots with different sensory capabilities:
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Evolved homogeneous neuro-controllers for robots with different sensory capabilities:
EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS
 EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS DAVIDE MAROCCO STEFANO NOLFI Institute of Cognitive Science and Technologies, CNR, Via San Martino della Battaglia 44, Rome, 00185, Italy
EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS DAVIDE MAROCCO STEFANO NOLFI Institute of Cognitive Science and Technologies, CNR, Via San Martino della Battaglia 44, Rome, 00185, Italy
ARGoS: a Modular, Multi-Engine Simulator for Heterogeneous Swarm Robotics
 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-30, 2011. San Francisco, CA, USA ARGoS: a Modular, Multi-Engine Simulator for Heterogeneous Swarm Robotics Carlo Pinciroli,
2011 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-30, 2011. San Francisco, CA, USA ARGoS: a Modular, Multi-Engine Simulator for Heterogeneous Swarm Robotics Carlo Pinciroli,
Learning Reactive Neurocontrollers using Simulated Annealing for Mobile Robots
 Learning Reactive Neurocontrollers using Simulated Annealing for Mobile Robots Philippe Lucidarme, Alain Liégeois LIRMM, University Montpellier II, France, lucidarm@lirmm.fr Abstract This paper presents
Learning Reactive Neurocontrollers using Simulated Annealing for Mobile Robots Philippe Lucidarme, Alain Liégeois LIRMM, University Montpellier II, France, lucidarm@lirmm.fr Abstract This paper presents
Towards Cooperation in a Heterogeneous Robot Swarm through Spatially Targeted Communication
 Université Libre de Bruxelles Faculté des Sciences Appliquées CODE - Computers and Decision Engineering IRIDIA - Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle
Université Libre de Bruxelles Faculté des Sciences Appliquées CODE - Computers and Decision Engineering IRIDIA - Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle
Self-Organized Flocking with a Mobile Robot Swarm: a Novel Motion Control Method
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Self-Organized Flocking with a Mobile Robot Swarm: a Novel Motion Control Method
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Self-Organized Flocking with a Mobile Robot Swarm: a Novel Motion Control Method
Biological Inspirations for Distributed Robotics. Dr. Daisy Tang
 Biological Inspirations for Distributed Robotics Dr. Daisy Tang Outline Biological inspirations Understand two types of biological parallels Understand key ideas for distributed robotics obtained from
Biological Inspirations for Distributed Robotics Dr. Daisy Tang Outline Biological inspirations Understand two types of biological parallels Understand key ideas for distributed robotics obtained from
Learning and Using Models of Kicking Motions for Legged Robots
 Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Computational Intelligence Optimization
 Computational Intelligence Optimization Ferrante Neri Department of Mathematical Information Technology, University of Jyväskylä 12.09.2011 1 What is Optimization? 2 What is a fitness landscape? 3 Features
Computational Intelligence Optimization Ferrante Neri Department of Mathematical Information Technology, University of Jyväskylä 12.09.2011 1 What is Optimization? 2 What is a fitness landscape? 3 Features
Jager UAVs to Locate GPS Interference
 JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
Autonomous Initialization of Robot Formations
 Autonomous Initialization of Robot Formations Mathieu Lemay, François Michaud, Dominic Létourneau and Jean-Marc Valin LABORIUS Research Laboratory on Mobile Robotics and Intelligent Systems Department
Autonomous Initialization of Robot Formations Mathieu Lemay, François Michaud, Dominic Létourneau and Jean-Marc Valin LABORIUS Research Laboratory on Mobile Robotics and Intelligent Systems Department
Stanford Center for AI Safety
 Stanford Center for AI Safety Clark Barrett, David L. Dill, Mykel J. Kochenderfer, Dorsa Sadigh 1 Introduction Software-based systems play important roles in many areas of modern life, including manufacturing,
Stanford Center for AI Safety Clark Barrett, David L. Dill, Mykel J. Kochenderfer, Dorsa Sadigh 1 Introduction Software-based systems play important roles in many areas of modern life, including manufacturing,
Multi-Robot Coordination. Chapter 11
 Multi-Robot Coordination Chapter 11 Objectives To understand some of the problems being studied with multiple robots To understand the challenges involved with coordinating robots To investigate a simple
Multi-Robot Coordination Chapter 11 Objectives To understand some of the problems being studied with multiple robots To understand the challenges involved with coordinating robots To investigate a simple
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Evolving Autonomous Self-Assembly in Homogeneous Robots Christos Ampatzis, Elio
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Evolving Autonomous Self-Assembly in Homogeneous Robots Christos Ampatzis, Elio
Holland, Jane; Griffith, Josephine; O'Riordan, Colm.
 Provided by the author(s) and NUI Galway in accordance with publisher policies. Please cite the published version when available. Title An evolutionary approach to formation control with mobile robots
Provided by the author(s) and NUI Galway in accordance with publisher policies. Please cite the published version when available. Title An evolutionary approach to formation control with mobile robots
Reinforcement Learning Simulations and Robotics
 Reinforcement Learning Simulations and Robotics Models Partially observable noise in sensors Policy search methods rather than value functionbased approaches Isolate key parameters by choosing an appropriate
Reinforcement Learning Simulations and Robotics Models Partially observable noise in sensors Policy search methods rather than value functionbased approaches Isolate key parameters by choosing an appropriate
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CS 599: Distributed Intelligence in Robotics
 CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
Hybrid Control of Swarms for Resource Selection
 Hybrid Control of Swarms for Resource Selection Marco Trabattoni 1(B), Gabriele Valentini 2, and Marco Dorigo 1 1 IRIDIA, Université Libre de Bruxelles, Brussels, Belgium {mtrabatt,mdorigo}@ulb.ac.be 2
Hybrid Control of Swarms for Resource Selection Marco Trabattoni 1(B), Gabriele Valentini 2, and Marco Dorigo 1 1 IRIDIA, Université Libre de Bruxelles, Brussels, Belgium {mtrabatt,mdorigo}@ulb.ac.be 2
Blockchain technology for robot swarms: A shared knowledge and reputation management system for collective estimation
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Blockchain technology for robot swarms: A shared knowledge and reputation management
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Blockchain technology for robot swarms: A shared knowledge and reputation management
SYSTEMATIC MODEL BASED AND SEARCH BASED TESTING OF CYBER PHYSICAL SYSTEMS
 Sophia Antipolis, French Riviera 20-22 October 2015 SYSTEMATIC MODEL BASED AND SEARCH BASED TESTING OF CYBER PHYSICAL SYSTEMS Shaukat Ali, PhD, Senior Research Scientist Email: shaukat@simula.no All rights
Sophia Antipolis, French Riviera 20-22 October 2015 SYSTEMATIC MODEL BASED AND SEARCH BASED TESTING OF CYBER PHYSICAL SYSTEMS Shaukat Ali, PhD, Senior Research Scientist Email: shaukat@simula.no All rights
Evolved Neurodynamics for Robot Control
 Evolved Neurodynamics for Robot Control Frank Pasemann, Martin Hülse, Keyan Zahedi Fraunhofer Institute for Autonomous Intelligent Systems (AiS) Schloss Birlinghoven, D-53754 Sankt Augustin, Germany Abstract
Evolved Neurodynamics for Robot Control Frank Pasemann, Martin Hülse, Keyan Zahedi Fraunhofer Institute for Autonomous Intelligent Systems (AiS) Schloss Birlinghoven, D-53754 Sankt Augustin, Germany Abstract
! The architecture of the robot control system! Also maybe some aspects of its body/motors/sensors
 Towards the more concrete end of the Alife spectrum is robotics. Alife -- because it is the attempt to synthesise -- at some level -- 'lifelike behaviour. AI is often associated with a particular style
Towards the more concrete end of the Alife spectrum is robotics. Alife -- because it is the attempt to synthesise -- at some level -- 'lifelike behaviour. AI is often associated with a particular style
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Evolution of Solitary and Group Transport Behaviors for Autonomous Robots Capable
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Evolution of Solitary and Group Transport Behaviors for Autonomous Robots Capable
Breedbot: An Edutainment Robotics System to Link Digital and Real World
 Breedbot: An Edutainment Robotics System to Link Digital and Real World Orazio Miglino 1,2, Onofrio Gigliotta 2,3, Michela Ponticorvo 1, and Stefano Nolfi 2 1 Department of Relational Sciences G.Iacono,
Breedbot: An Edutainment Robotics System to Link Digital and Real World Orazio Miglino 1,2, Onofrio Gigliotta 2,3, Michela Ponticorvo 1, and Stefano Nolfi 2 1 Department of Relational Sciences G.Iacono,
Information Aggregation Mechanisms in Social Odometry
 Information Aggregation Mechanisms in Social Odometry Roman Miletitch 1, Vito Trianni 3, Alexandre Campo 2 and Marco Dorigo 1 1 IRIDIA, CoDE, Université Libre de Bruxelles, Belgium 2 Unit of Social Ecology,
Information Aggregation Mechanisms in Social Odometry Roman Miletitch 1, Vito Trianni 3, Alexandre Campo 2 and Marco Dorigo 1 1 IRIDIA, CoDE, Université Libre de Bruxelles, Belgium 2 Unit of Social Ecology,
CS594, Section 30682:
 CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
On the Design and Implementation of an Accurate, Efficient, and Flexible Simulator for Heterogeneous Swarm Robotics Systems
 UNIVERSITÉ LIBRE DE BRUXELLES École Polytechnique de Bruxelles IRIDIA - Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle On the Design and Implementation of
UNIVERSITÉ LIBRE DE BRUXELLES École Polytechnique de Bruxelles IRIDIA - Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle On the Design and Implementation of
Efficient Decision-Making in a Self-Organizing Robot Swarm: On the Speed Versus Accuracy Trade-Off
 Efficient Decision-Making in a Self-Organizing Robot Swarm: On the Speed Versus Accuracy Trade-Off Gabriele Valentini, Heiko Hamann and Marco Dorigo IRIDIA, Université Libre de Bruxelles, Brussels, Belgium
Efficient Decision-Making in a Self-Organizing Robot Swarm: On the Speed Versus Accuracy Trade-Off Gabriele Valentini, Heiko Hamann and Marco Dorigo IRIDIA, Université Libre de Bruxelles, Brussels, Belgium
Learning and Using Models of Kicking Motions for Legged Robots
 Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
ARGoS: a Pluggable, Multi-Physics Engine Simulator for Heterogeneous Swarm Robotics
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle ARGoS: a Pluggable, Multi-Physics Engine Simulator for Heterogeneous Swarm Robotics
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle ARGoS: a Pluggable, Multi-Physics Engine Simulator for Heterogeneous Swarm Robotics
SWARM INTELLIGENCE. Mario Pavone Department of Mathematics & Computer Science University of Catania
 Worker Ant #1: I'm lost! Where's the line? What do I do? Worker Ant #2: Help! Worker Ant #3: We'll be stuck here forever! Mr. Soil: Do not panic, do not panic. We are trained professionals. Now, stay calm.
Worker Ant #1: I'm lost! Where's the line? What do I do? Worker Ant #2: Help! Worker Ant #3: We'll be stuck here forever! Mr. Soil: Do not panic, do not panic. We are trained professionals. Now, stay calm.
DETECTION AND CLASSIFICATION OF POWER QUALITY DISTURBANCES
 DETECTION AND CLASSIFICATION OF POWER QUALITY DISTURBANCES Ph.D. THESIS by UTKARSH SINGH INDIAN INSTITUTE OF TECHNOLOGY ROORKEE ROORKEE-247 667 (INDIA) OCTOBER, 2017 DETECTION AND CLASSIFICATION OF POWER
DETECTION AND CLASSIFICATION OF POWER QUALITY DISTURBANCES Ph.D. THESIS by UTKARSH SINGH INDIAN INSTITUTE OF TECHNOLOGY ROORKEE ROORKEE-247 667 (INDIA) OCTOBER, 2017 DETECTION AND CLASSIFICATION OF POWER
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Cooperation through self-assembly in multi-robot systems Elio Tuci, Roderich Groß,
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Cooperation through self-assembly in multi-robot systems Elio Tuci, Roderich Groß,
Collective Transport with Obstacle Avoidance through Socially-Mediated Negotiation
 Université Libre de Bruxelles Faculté des Sciences Appliquées CODE - Computers and Decision Engineering IRIDIA - Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle
Université Libre de Bruxelles Faculté des Sciences Appliquées CODE - Computers and Decision Engineering IRIDIA - Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle
Neuro-Fuzzy and Soft Computing: Fuzzy Sets. Chapter 1 of Neuro-Fuzzy and Soft Computing by Jang, Sun and Mizutani
 Chapter 1 of Neuro-Fuzzy and Soft Computing by Jang, Sun and Mizutani Outline Introduction Soft Computing (SC) vs. Conventional Artificial Intelligence (AI) Neuro-Fuzzy (NF) and SC Characteristics 2 Introduction
Chapter 1 of Neuro-Fuzzy and Soft Computing by Jang, Sun and Mizutani Outline Introduction Soft Computing (SC) vs. Conventional Artificial Intelligence (AI) Neuro-Fuzzy (NF) and SC Characteristics 2 Introduction
Adaptive Sensor Selection Algorithms for Wireless Sensor Networks. Silvia Santini PhD defense October 12, 2009
 Adaptive Sensor Selection Algorithms for Wireless Sensor Networks Silvia Santini PhD defense October 12, 2009 Wireless Sensor Networks (WSNs) WSN: compound of sensor nodes Sensor nodes Computation Wireless
Adaptive Sensor Selection Algorithms for Wireless Sensor Networks Silvia Santini PhD defense October 12, 2009 Wireless Sensor Networks (WSNs) WSN: compound of sensor nodes Sensor nodes Computation Wireless
arxiv: v1 [cs.ai] 31 Jan 2011
![arxiv: v1 [cs.ai] 31 Jan 2011](/thumbs/88/115354180.jpg "arxiv: v1 [cs.ai] 31 Jan 2011") Boolean network robotics: a proof of concept arxiv:1101.6001v1 [cs.ai] 31 Jan 2011 Andrea Roli and Mattia Manfroni DEIS-Cesena Alma Mater Studiorum Università di Bologna, Italy Carlo Pinciroli and Mauro
Boolean network robotics: a proof of concept arxiv:1101.6001v1 [cs.ai] 31 Jan 2011 Andrea Roli and Mattia Manfroni DEIS-Cesena Alma Mater Studiorum Università di Bologna, Italy Carlo Pinciroli and Mauro
On Feature Selection, Bias-Variance, and Bagging
 On Feature Selection, Bias-Variance, and Bagging Art Munson 1 Rich Caruana 2 1 Department of Computer Science Cornell University 2 Microsoft Corporation ECML-PKDD 2009 Munson; Caruana (Cornell; Microsoft)
On Feature Selection, Bias-Variance, and Bagging Art Munson 1 Rich Caruana 2 1 Department of Computer Science Cornell University 2 Microsoft Corporation ECML-PKDD 2009 Munson; Caruana (Cornell; Microsoft)
Real-time Systems in Tokamak Devices. A case study: the JET Tokamak May 25, 2010
 Real-time Systems in Tokamak Devices. A case study: the JET Tokamak May 25, 2010 May 25, 2010-17 th Real-Time Conference, Lisbon 1 D. Alves 2 T. Bellizio 1 R. Felton 3 A. C. Neto 2 F. Sartori 4 R. Vitelli
Real-time Systems in Tokamak Devices. A case study: the JET Tokamak May 25, 2010 May 25, 2010-17 th Real-Time Conference, Lisbon 1 D. Alves 2 T. Bellizio 1 R. Felton 3 A. C. Neto 2 F. Sartori 4 R. Vitelli
Constructing K-Connected M-Dominating Sets
 Constructing K-Connected M-Dominating Sets in Wireless Sensor Networks Yiwei Wu, Feng Wang, My T. Thai and Yingshu Li Georgia State University Arizona State University University of Florida Outline Introduction
Constructing K-Connected M-Dominating Sets in Wireless Sensor Networks Yiwei Wu, Feng Wang, My T. Thai and Yingshu Li Georgia State University Arizona State University University of Florida Outline Introduction
Transferring Technical debt to automated Production Systems (aps)
") Outline Transferring Technical debt to automated Production Systems (aps) 1. Domain specific constraints 2. Types of Technical Debt 3. Causes of Architectural Technical Debt in aps 4. ATD- Parallel development
Outline Transferring Technical debt to automated Production Systems (aps) 1. Domain specific constraints 2. Types of Technical Debt 3. Causes of Architectural Technical Debt in aps 4. ATD- Parallel development
Increasing the precision of mobile sensing systems through super-sampling
 Increasing the precision of mobile sensing systems through super-sampling RJ Honicky, Eric A. Brewer, John F. Canny, Ronald C. Cohen Department of Computer Science, UC Berkeley Email: {honicky,brewer,jfc}@cs.berkeley.edu
Increasing the precision of mobile sensing systems through super-sampling RJ Honicky, Eric A. Brewer, John F. Canny, Ronald C. Cohen Department of Computer Science, UC Berkeley Email: {honicky,brewer,jfc}@cs.berkeley.edu
Cooperation through self-assembly in multi-robot systems
 Cooperation through self-assembly in multi-robot systems ELIO TUCI IRIDIA - Université Libre de Bruxelles - Belgium RODERICH GROSS IRIDIA - Université Libre de Bruxelles - Belgium VITO TRIANNI IRIDIA -
Cooperation through self-assembly in multi-robot systems ELIO TUCI IRIDIA - Université Libre de Bruxelles - Belgium RODERICH GROSS IRIDIA - Université Libre de Bruxelles - Belgium VITO TRIANNI IRIDIA -
NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION
 Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
A Bandit Approach for Tree Search
 A An Example in Computer-Go Department of Statistics, University of Michigan March 27th, 2008 A 1 Bandit Problem K-Armed Bandit UCB Algorithms for K-Armed Bandit Problem 2 Classical Tree Search UCT Algorithm
A An Example in Computer-Go Department of Statistics, University of Michigan March 27th, 2008 A 1 Bandit Problem K-Armed Bandit UCB Algorithms for K-Armed Bandit Problem 2 Classical Tree Search UCT Algorithm
IMPLEMENTING MULTIPLE ROBOT ARCHITECTURES USING MOBILE AGENTS
 IMPLEMENTING MULTIPLE ROBOT ARCHITECTURES USING MOBILE AGENTS L. M. Cragg and H. Hu Department of Computer Science, University of Essex, Wivenhoe Park, Colchester, CO4 3SQ E-mail: {lmcrag, hhu}@essex.ac.uk
IMPLEMENTING MULTIPLE ROBOT ARCHITECTURES USING MOBILE AGENTS L. M. Cragg and H. Hu Department of Computer Science, University of Essex, Wivenhoe Park, Colchester, CO4 3SQ E-mail: {lmcrag, hhu}@essex.ac.uk
Self-adapting Fitness Evaluation Times for On-line Evolution of Simulated Robots
 Self-adapting Fitness Evaluation Times for On-line Evolution of Simulated Robots C.M. Dinu VU University Amsterdam c.dinu@student.vu.nl P. Dimitrov VU University Amsterdam p.dimitrov@student.vu.nl A.E.
Self-adapting Fitness Evaluation Times for On-line Evolution of Simulated Robots C.M. Dinu VU University Amsterdam c.dinu@student.vu.nl P. Dimitrov VU University Amsterdam p.dimitrov@student.vu.nl A.E.
Evolution of Sensor Suites for Complex Environments
 Evolution of Sensor Suites for Complex Environments Annie S. Wu, Ayse S. Yilmaz, and John C. Sciortino, Jr. Abstract We present a genetic algorithm (GA) based decision tool for the design and configuration
Evolution of Sensor Suites for Complex Environments Annie S. Wu, Ayse S. Yilmaz, and John C. Sciortino, Jr. Abstract We present a genetic algorithm (GA) based decision tool for the design and configuration
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Towards collective robotics in a 3d space: simulation with hand-bot robots Giovanni
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Towards collective robotics in a 3d space: simulation with hand-bot robots Giovanni