TABLE OF CONTENT. 1.0 Introduction Theory Results Discussion Conclusion References
|
|
|
- Emmeline Hall
- 5 years ago
- Views:
Transcription
1 ABSTRACT This process control laboratory is about to run open and closed loop process. An open loop is run in manual mode while closed loop is run in automatic mode. In this experiment, five closed loop analysis are involved which comprises of Level Control Process (LIC 11), Air Flow Control (FIC 91), Air Pressure Control (PIC 92), Flow Control (FIC 21) and Liquid Flow Process (FIC 31). By using the response curve from the loop analysis, Response Rate (RR), Time delay (T d ) and Time constant (T c ) are calculated by using Reformulated Tangent Method. Then, Ziegler-Nichols and Cohen Coon tuning rule formula are used in order to calculate the optimum value. By using the calculated value based on Ziegler-Nichols, open loop test is running. The process is run in automatic mode. Three main tests have been conducted in each of the open loop which includes tuning test, set point change test and load disturbance test. When we increase the changing in MV value, the value of controller gain, K c will increase and can affect the respond of the process to become more faster and the process become more stable. By decreasing the controller gain, K c it also reduce the oscillatory and make the process become more stable. The integral time, I value is decreased and it accelerates the process to the set point 2
2 TABLE OF CONTENT TITLES PAGE 1.0 Introduction Theory Results Discussion Conclusion References Appendices 28 3
3 1.0 INTRODUCTION Process control keeps processes within specified boundaries and minimises variations [5]. Nowadays, wide variety of modern process control systems have been installed progressively in most industrial sites in order to help maintain throughput, quality, yield and energy efficiency as well as to ensure safe and profitable operation. The measurement and control system is the central nervous system of any plant, as it operates at different levels that sense change and initiate actions [5]. Process control system refers to the control of one or more process variables such as ph, level, temperature, flow and pressure. In process control system, the process variables is compared to a set point by the controller and the results of the comparison will be utilized to control the process in such a manner that the process variable will be substantially equal to the set point for the process variable (Robert W. Rutledge, 1980). Nowadays, the applications of the process control are huge in the industrial field. For instance, advanced process control plays an important role in chemical and process industry. PID control, conventional advanced control and linear/nonlinear model predictive control have been used in industry in order to increase the productivity. The industrial PID has many options, tools and parameters for dealing with the wide spectrum of difficulties and opportunities in manufacturing plants. The PID controller is an essential part of every control loop in the process industry (Astrom K., Hagglund T., 2006). Studies have shown that the PID provides an optimal solution of the regulator problem (rejection of disturbances) and with simple enhancements, provides an optimum servo response (setpoint response) (Bohl A., McAvoy T., 1976). Test show that the PID performs better than Model Predictive Control (MPC) for unmeasured disturbances in terms of peak error, integrated error or robustness (McMillan G., 2004). The PID controller in the modern Distributed Control System (DCS) has an extensive set of features and their importance for addressing challenging applications and control objectives for common unit operation applications in the process industry. In the production for most new pharmaceuticals, bioreactors are used due to proteins too complex to be produced by chemical processes. Biopharmaceutical batch processes are predominantly batch because of the concern for the build up of the toxins and genetically deficient cells with continuous processes and the need to get new drugs to market quickly. In bioreactors, ph, temperature and dissolved oxygen are the important loops to be considered. Generally, for a well designed system the allowable controller gain is extremely limited only by the measurement noise because of the ratio of deadtime to time constant is relatively 4
4 small. The high controller gain in combination with the extremely slow disturbances translates to exceptionally tight PID control (Ramon V., Antonio V., 2011). In the system, no overshoot at the start of the batch essentially with getting to temperature setpoint as fast as possible is being concerned. If there is no concern about batch cycle time and low temperatures do not cause seed cell degradation, a PID structure of integral mode on error and proportional and derivative modes on PV is used to eliminate overshoot (McMillan G., 2010). It is usually less than ideal for the automation and bioreactor system design. In bioreactor, ph loops and dissolved oxygen will interact whenever the piping and spurger for the injection of oxygen or air for dissolved oxygen control and addition of carbon dioxide for ph control are not completely separated. For this case, the interaction between ph and dissolved oxygen loops can be reduce with the use of half decoupler and enhanced PID. Wireless ph transmitters have been found to eliminate the spikes commonly seen in bioreactor loops (McMillan G., Baril R., 2010). As sliding stem (globe) control stem valves are not suitable for sanitary and sterilization-in-place (SIP), thus, most of bioreactor loops does not use it. The alternative final control elements used may have a poor resolution or sensitivity limit and backlash. Hence, the associated limit cycles can be extinguished with the enhanced PID. Otherwise, enhanced PID can make sample time for a bioreactor batch that takes 1 to 2 weeks fast enough to do closed loop control by dealing with the analyzer cycle time and resolution limits. Chemical reactors set the stage for the production of bulk chemicals, intermediates, petrochemicals, polymers, pharmaceutical chemicals and speciality chemicals (Ramon V., Antonio V., 2011). Batch reactors are commonly used in pharmaceutical industries and in the production of special chemicals and other products predominantly use continuous reactors. The temperature PID is the most important controller since the reaction rate is often an exponential function of temperature via the Arrhenius Equation (Ramon V., Antonio V., 2011). The deadtime to time constant ratio for well mixed continuous reactors and the deadtime to integrating process gain ratio for batch reactors are incredibly small (<0.001) (Ramon V., Antonio V., 2011). The result is a permissible PID gain much larger than users are accustomed to (>50) and exceptionally tight temperature control (Ramon V., Antonio V., 2011). Since the most important task of the utility system is to satisfy the demands of the temperature PID, the transfer of variability by the PID from the reactor temperature to its utility system is maximised. Performance limitation is due to the accuracy of the temperature sensor and the threshold sensitivity and resolution of the final control elements. Premium Resistant Temperature Detectors (RTD) and sliding stem valves with digital positioners should be used to allow the full capability of the PID to be realized [12, 13, 14]. 5
5 The ph control of neutralizers can be particularly challenging due to the extreme nonlinearity and sensitivity of the ph measurement as a result of the exponential relationship between ph and hydrogen ion activity [9]. The changes in controller gain and the rangeability and threshold sensitivity of the final element needed are extraordinary. PID gain changes of 1000 to 1 and a final element rangeability requirement of to 1 are possible with strong acid and base system (Ramon V., Antonio V., 2011). In order to keep waste streams in compliance with environmental regulations, it is necessary to determine the number of neutralization stages by precision of the final element. The limit cycle amplitude from threshold sensitivity and resolution limits can be extremely large due to amplification by the steep slope of the titration curve (McMillan G., 2003). The 7 ph value for a broken electrode or wire and the failure to last value of a coated electrode are insidious (McMillan G., 2003). Some solutions that can be considered in this case are signal linearization, adaptive tuning, split range control, valve position control (VPC) and the enhanced PID. Controlled variable can be translated from ph to reagent demand per the titration curve by using signal linearization. While, changes in the titration curve and process dynamics can be corrected with adaptive tuning. Neutralization with both acids and bases can be handled with split ranged control. Whereas, in order to keep good throttle range for ph control, a VPC can adjust a large (coarse) valve to keep a small (fine) valve. Otherwise, PVC can also maximize the use of waste and low cost reagents. Portable wireless ph transmitters can eliminates spikes from EMI as well as optimize the control location. Finally, the enhanced PID can eliminate oscillations from split range point discontinuities and from valve backlash, threshold sensitivity, and resolution, reduce interactions between the small and large valves, prevent overreaction to ph electrode failures, and extend wireless battery life [11, 16]. Furthermore, liquid level control plays important role in industrial application as in food processing industry, dairy, filtration, effluent treatment, nuclear power generation plants, pharmaceutical industries, water purification systems, industrial chemical processing and spray coating and boilers in all the industries. The typical actuators used in liquid level control systems include pumps, motorized valves, on-off valves and level sensors such as displacement float, capacitance probe and pressure sensor provide liquid level measurement for feedback control purpose so that as per the process requirements the fluids could be controlled (Farhad A., 2011). Basically, the objective of the controller in the level control system is to maintain a level set point at a given value and be able to accept new set point values dynamically. In controlling the level, commonly conventional PID is used to utilize it. A PID gain is tune automatically by auto tuning in a Simulink model containing a PID controller block. By tuning the PID, it allows to achieve a good balance between performance and robustness. It will automatically compute a linear model of the plant. The plant will be 6
6 considered by PID tuner to be the combination of all blocks between the PID controller input and output. Other than the controller itself, the plant includes all blocks in the control loop. The main objectives of PID tuner are closed-loop stability (in which system output remains bounded for bounded input), adequate performance (in which closed loop system tracks reference changes and suppresses disturbance as rapidly as possible) and adequate robustness (the loop design has enough gain margin and phase margin to allow for modelling errors or variations in system dynamics (Farhad A., 2011). By adjusting response time, design modes of PID tuner refine the controller design. This makes the closed loop response of the controlled system slower or faster. While, by separately adjust loop bandwidth and phase margin, an extended design mode of PID tuner refine the controller design. The controllers will response faster to changes in the reference or disturbances in the loop whenever the loop bandwidth is larger. The more robust the controller is against modelling errors or variations in plant dynamics if the phase margin is larger. One of the reasons that make Proportional-integral-derivative (PID) controllers is widely used in industrial control systems is due to the reduced number of parameters to be tuned. Zieglar-Nichols method is one of the most popular design techniques that are commonly used. The conventional PID controller is replaced by Ziegler-Nichols tuning PID controller to make them more general and to achieve the minimum steady state error, also to improve the other dynamic behaviour (Rajkumar, A. Patra, Vijay, 2012). Most process industries used PID controller to control the plant (system) for the desired set point. PID control method is the most popular among all control method because of it is flexible and simple. PID controller is tuned by determination of proportional (KP), derivative (KD) and integral (KI) constants. This method is used when the system is in open loop configuration. PID control is the proportion of error (P), integral of error (I), differential of error (D) control. Z- N PID controller is controlling the plant or system by continuously monitoring plant output which is known as process value with the desired process value known as set point of the system [18]. The difference between process value and set point that manipulates by PID controller is known as error. In the conventional controlling method the transfer function of plant should be calculated in order to find out various parameters and the value of PID constants. But in this method there is no necessary to derive the transfer function of the system. Thus, Z-N PID controller is monitoring the plant depending on set point and process value and irrespective of the nature of plant [19, 20]. The main features of PID controllers are the capacity to eliminate steady-state error of the response to a step reference signal because of integral action and the ability to anticipate output changes when derivative action is employed [18]. In a power plant, both active and 7
7 reactive power demands continually vary the rising or falling trend. Power input must therefore be continuously regulated to match the active power demand, otherwise the machine speed will change with consequent change in frequency, which may be highly undesirable [18]. The excitation of generators must be continuously regulated to match the reactive power demand with reactive generation, failing which the voltage at various system buses may go beyond the prescribed limits [18]. It is necessary to maintain the frequency of the power system constant. The governors adjust the input to bring the frequency with in permissible limits [21]. PID controllers is tuned as to make the plant more general and to achieve the minimum steady state error as well as to improve the other dynamic behaviour. The Ziegler-Nichols step response method provides systematic means to adjust the proportional gain in order to have no overshoot on the closed-loop step-response [18]. In the design of plant control system, the PID controllers can be designed associated with under damped step responses. Instead of transfer function of the system, PID constants are strongly depends on the set point and tune controller feature that can improve the system performance. PID controllers attributed to the controllers effectiveness in a wide range of operation conditions, its functional simplicity, and the ease with which engineers can implement it using current computer technology. Hence, PID control algorithms are popular and offer many benefits such ease of use, new development help to implement other PID controller variants and control for common industry application. 8
8 2.0 THEORY PID controllers are capable stabilizing processes at any set point by utilizing a mathematical function in the form of the control algorithm [1]. Process stability of a PID control loop depends upon the proportional, integral and derivative constants used [1]. An optimum proportional (P), integral (I) and derivative (D) values can be obtained using several simple techniques performed on an open loop test. Open loop test can be done with several steps, firstly by stabilizing the process in manual mode. Then, making step change ( MV) of 5 to 20% to the controllers output and record the initial as well as the final MV value. Finally, response of the process variable is recorded until the process reaches a new steady state level. An open loop test might be in self regulating process or non self regulating process. In open loop process identification, there are several quick and easy techniques that can be approached. These techniques include tangent method, reformulated tangent method and numerical method. Those methods extract most vital information about the process dynamic, namely process dead time (T d ) and the response rate (RR). This information then is used in the tuning rules, such as Zieglar-Nichols in order to estimate the optimum P, I and D for the controller. In the tangent method, an optimum PB, I and D is found at the maximum slope. The process dead time (T d ) and the response rate (RR) are analyzed by drawing a tangent line to the steepest point of the response curve. By the definition, the process dead time (T d ) is a period of time between starting point of step input and the intersection of old steady state baseline and tangent line [2]. Figure 2.1 shows the step change made ( MV), the drawn tangent line and the estimated process dead time (T d ). 9
9 Figure 2.1: A step change of MV (bottom) and the self regulating process response curve (top). (Abdul Aziz Ishak, 2011) The process response rate (RR) is defined [1,2] as, RR = PV/ t MV maximum slope = MV (1) Where, RR = response rate, 1/time PV = change in measurement, % t = change in time, time MV = change in controllers output, % T d and RR are incorporated in the tuning rule for the optimum PID calculation [1]. In the reformulated tangent method, the open loop response curve is analyzed and viewed in different perspective. This method is based on tangent method but utilized trigonometry to estimate the gradient [2]. Figure 2.2 shows the same response curve as in Figure 2.1 but is being analyzed in different perspective. 10
10 Figure 2.2: Transforming process rate into trigonometric form [1]. (Abdul Aziz Ishak, 2011) Based on the Figure 2.2, the process response rate (RR) of equation (1) is then reformulated by, PV/ t MV = y/ x MV (2) But the right-hand side and the left-hand side of the equations are dimensionally incorrect. Thus, by balancing the units and place the appropriate scaling factors to the right hand side of the equation, equation (2) will transforms into equation (4). % time = lengt h lengt h PV/ t MV = y a x b MV ( % lengt h ) ( time lengt h ) (3) (4) Where, a = scaling factor for y-axis, % / length b = scaling factor for x-axis, time / length 11
11 As y x = tan θ, equation (4) transforms into, RR = PV/ t MV tan θ a = MV b (5) T d (time) = T d (length) b (6) T c (time) = T c (length) b (7) Time constant formulation based on Reformulated Tangent Method [2]. Figure 2.3: Reformulated tangent method for time constant (Abdul Aziz Ishak, 2011). PV nss PV oss tan θ = Tnss Td ( b a ) (8) PV nss PV oss tan θ = Tc ( b a ) (9) T c = b a nss PV oss (PV ) (10) tan θ 12
12 Dead time formulation based on Reformulated Tangent Method [2]. Figure 2.4: Reformulated Tangent Method for dead time (Abdul Aziz Ishak, 2011) PV nss PV oss tan β = Tnss ( b a ) (11) Tnss = PVnss PVoss tan β ( b a ) (12) T d = T nss T c (13) PV nss PV oss T d = tan β ( b PV nss PV oss ) a tan θ ( b a ) (14) T d = (PV nss PV oss ) ( b a ) { 1 tan β 1 tan θ } (15) 13
13 Numerical analysis on openloop response data Figure 2.5: Numerical formulation for response rate, RR (Abdul Aziz Ishak, 2011) PV 1 PV 1 Slope = 2 h (16) Therefore, the response rate, RR becomes: RR = slope MV = PV 1 PV 1 2 h MV (17) Figure 2.6: Numerical formulation for dead time, T d (Abdul Aziz Ishak, 2011) 14
14 Slope at (T d, PV oss ) = slope at (t 1, PV 1 ) PV 1 PV oss t1 Td PV 1 PV 1 = 2 h (18) T d = t 1-2 h [ PV 1 PV oss PV 1 PV 1 ] (19) Figure 2.7: Numerical formulation for time constant, T c (Abdul Aziz Ishak, 2011) Slope at (T nss, PV nss ) = slope at (t 1, PV 1 ) PV nss PV oss Tnss Td PV 1 PV 1 = t1 t (20) T c = 2 h [ PV nss PV oss PV 1 PV 1 ] (21) 15
 Takahashis openloop tuning rule (Abdul Aziz Ishak,")
15 Ziegler-Nichols open loop tuning rule (Abdul Aziz Ishak, 2011) Takahashis openloop tuning rule (Abdul Aziz Ishak, 2011) 16
16 Cohen Coons openloop tuning rule (Abdul Aziz Ishak, 2011) 17
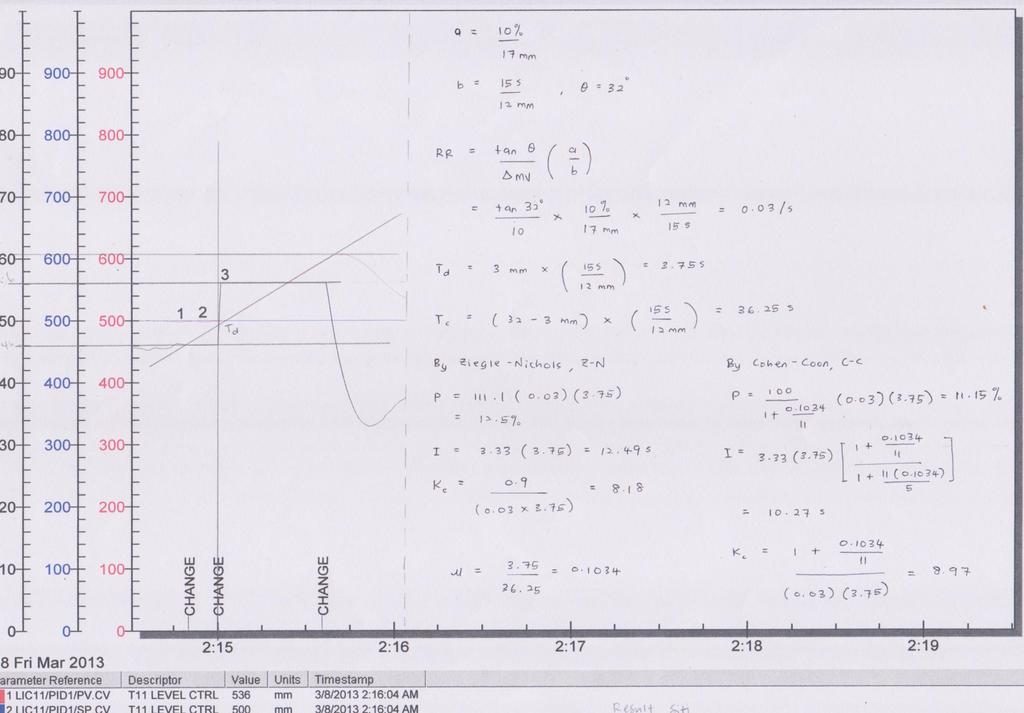
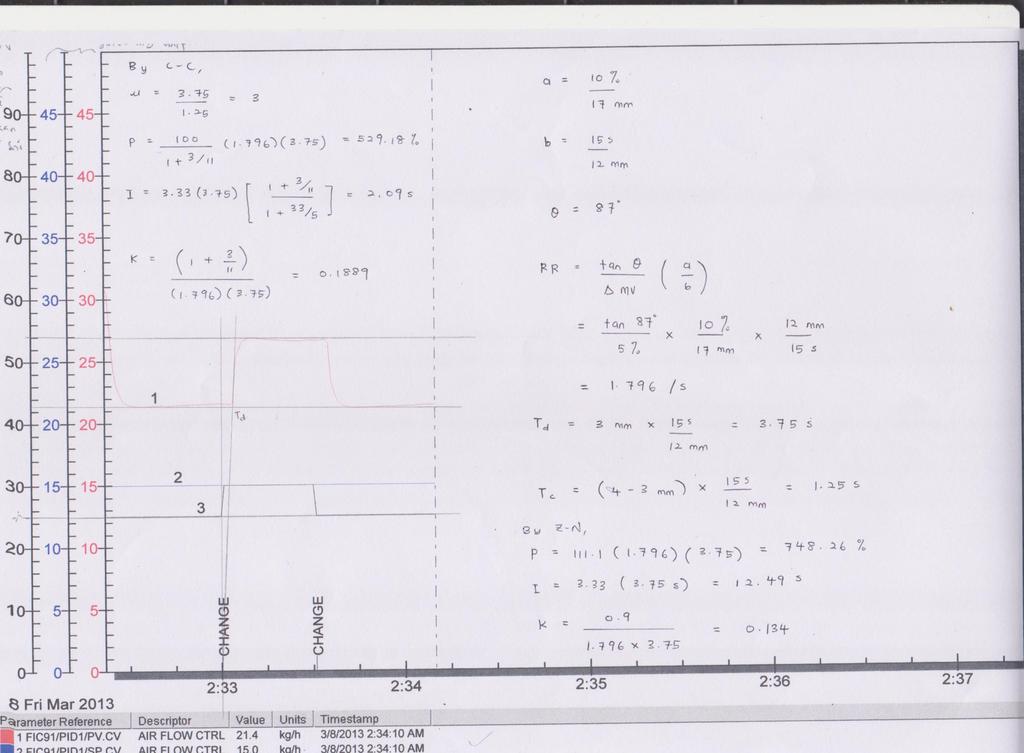
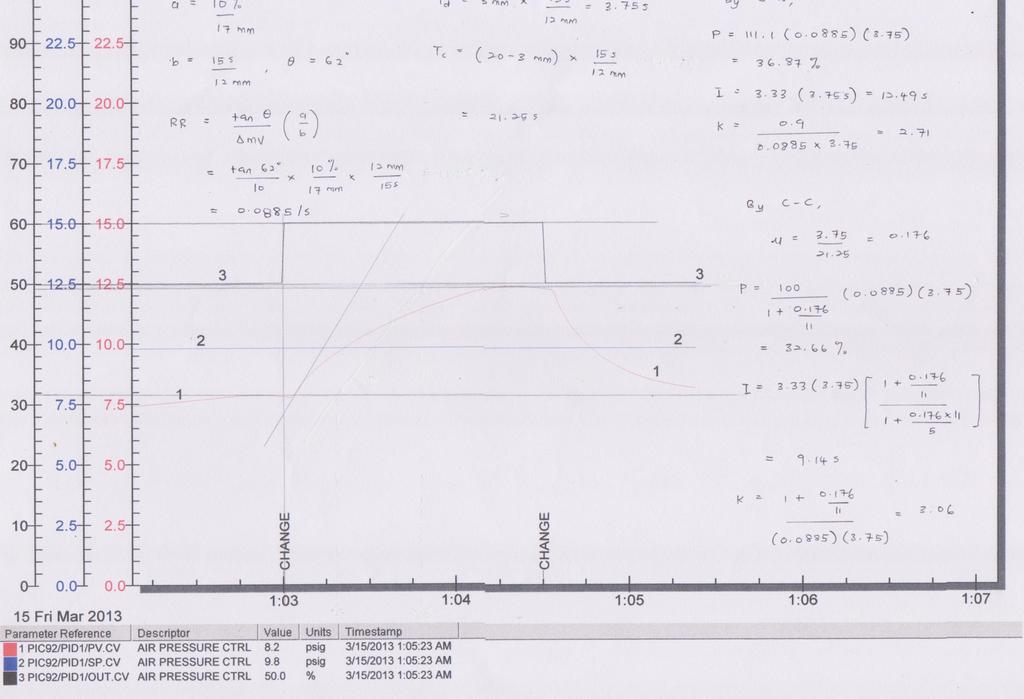
17 3.0 RESULT 3.1 Summary of process dynamics of various control loops Control Loop Parameters Reformulated Tangent Method Response rate, RR (s -1 ) 0.03 Level Control (LIC 11) Deadtime, T d (s) 3.75 Time Constant, T c (s) Response rate, RR (s -1 ) Air Mass Flowrate (FIC 91) Deadtime, T d (s) 3.75 Time Constant, T c (s) 1.25 Response rate, RR (s -1 ) 0.67 Liquid Flow (FIC 21) Deadtime, T d (s) 1.25 Time Constant, T c (s) 2.5 Response rate, RR (s -1 ) Gas Pressure Control (PIC 92) Deadtime, T d (s) 3.75 Time Constant, T c (s) Response rate, RR (s -1 ) Liquid Water Flowrate and Level Control (FIC 31) Deadtime, T d (s) 3.0 Time Constant, T c (s) 3.04 Table 3.1: Summary of process dynamics of various control loops 18
18 3.2 Summary of optimum controller settings for PI controller based on Ziegler-Nichol s and Cohen-Coon for Reformulated Tangent Method. Control Loop Parameters Reformulated Tangent Method Ziegler-Nichols Cohen-Coon Level Control (LIC 11) Proportional Band, PB % Controller Gain, K c Integral Time, I (s) Air Mass Flowrate (FIC 91) Proportional Band, PB % Controller Gain, K c Integral Time, I (s) Liquid Flow (FIC 21) Proportional Band, PB % Controller Gain, K c Integral Time, I (s) Gas Pressure Control (PIC 92) Proportional Band, PB % Controller Gain, K c Integral Time, I (s) Liquid Water Flowrate and Level Control (FIC 31) Proportional Band, PB % Controller Gain, K c Integral Time, I (s) Table 3.2: Summary of optimum controller settings for PI controller based on Ziegler-Nichol s and Cohen-Coon for Reformulated Tangent Method. 19
19 3.3 Tuning Test, Set point Test and Load Disturbance Test Control Loop Parameters Tuning Test Level Control (LIC 11) Air Mass Flowrate (FIC 91) Liquid Flow (FIC 21) Gas Pressure Control (PIC 92) Controller Gain, K c 8.18 Integral Time, I (s) Controller Gain, K c Integral Time, I (s) Controller Gain, K c 1.07 Integral Time, I (s) 4.16 Controller Gain, K c 2.71 Integral Time, I (s) Table 3.3: Result for Tuning Test Control Loop Parameters Old New Level Control (LIC 11) Set Point (mm) Air Mass Flowrate (FIC 91) Set Point (kg/h) Liquid Flow (FIC 21) Set Point (m 3 /h) Gas Pressure Control (PIC 92) Set Point (psig) Table 3.4: Result for Set Point Test 20
20 Control Loop Parameters Old New Level Control (LIC 11) MV, % Air Mass Flowrate (FIC 91) MV, % Liquid Flow (FIC 21) MV, % Gas Pressure Control (PIC 92) MV, % Table 3.5: Result for Load Disturbance Test 21
21 3.4 Numerical method for FIC 31 Times PV (m 3 /hr) PV (%) MV (%) Z-N Z-N Z-N C-C C-C C-C RR, 1/s Td, s Tc, s PB, % Kc I u=td/tc PB, % Kc I 11:30: :30: :30: :30: :30: :30: :30: :30: :30: :30: :30: :30: :30: Table 3.6: Result of FIC 31 for numerical method 22
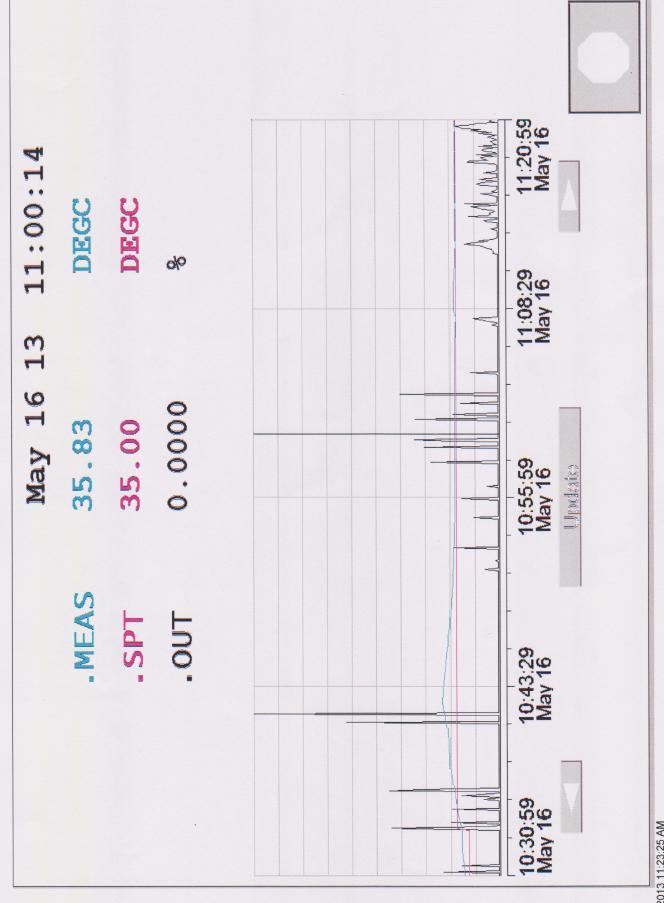
22 3.5 Numerical Method for TIC 91 Times PV ( C) PV (%) MV (%) Z-N Z-N Z-N Z-N C-C C-C C-C C-C RR, 1/s Td, s Tc, s PB, % Kc,s I,s D,s u=td/tc PB, % Kc,s I,s D,s 10:12: :12: :12: :11: :11: :11: :11: :11: :11: :10: :11: Table 3.7: Result of TIC 91 for numerical method 23
23 4.0 DISCUSSION Practically, this experiment has been run open loop test for Level control process (LIC 11), Air flow control (FIC 91), Air pressure control (PIC 92) and flow control (FIC 21). By using the response curve from the loop test, Response Rate (RR), Time delay (T d ) and Time constant (T s ) are calculated by using Reformulated Tangent Method formula. Then, Ziegler- Nichols and Cohen Coon tuning rule formula are used in order to calculate the optimum value. As Pressure, Level and Flow is fast process, so that PI formula is used in order to calculate the optimum value for the fast control process. From the comparison that has been made, it s only a small difference between the value that calculated by using Ziegler-Nichols method and the value using Cohen Coon method. Then, values calculated using PI formula for Ziegler-Nichols is used to running the closed loop control. After set up and running the process control system in Auto mode, enter the value of controller gain (K c ) and integral time (I) that has been calculated manually using Ziegler- Nichols into the system control. During the process, the response curve is observed and analyzed. Whenever the response curve is oscillating and active, the process is tuned until the response curve is stable and process is closed to the set point. Tuning is the process of setting control loop gains or other control variables to achieve optimum value and stable performance. The value of controller gain, K c and integral time, I are the control variables that was considered to achieve optimum controller setting. In this experiment, there is no exact value for the process to achieve an optimum performance. Under steady state condition, when the graph line of set point and process (PV) variable is equal then it is considered as optimum performance. In tuning process, whenever the response curve are oscillate very fast, the value of the controller gain, K c have to be reduce by divide the original value by 2 or 4 and increase the integral time, I value by multiply by 2 or 4 or with other value. For the Level Control (LIC 11), the value of open loop test was entered at the closed loop test. In the close loop test, the response of the graph that getting from the open loop is oscillate. The value of K c is divided by 4, so that the value of K c entered now is The response curve now became stable. Then, set point test is made. Set point is increase from 500 to 550 and then waits until the response curve stable. Next, by performed the load disturbance test, the value of MV is increased from 47.3 to 57.3%, and observes the response curve as well as wait until the response curve become stable. Summary for all control loop and all test result in table 5, 6 and 7. 24
24 The same method is used for Air Flow Control (FIC 91), Air Pressure Control (PIC 92) and Flow Control (FIC 21). For Air Flow Control (FIC 91), value for controller gain, K c now is and the value of integral time, I is 12.49s. As the response curve is fluctuation and not stable, the K c value is divided by 2, and multiply the I value by 2, 16s. By decrease the controller gain, K c value, the process become slower and less oscillatory, but by increased the integral time, I value, and it will accelerate the process towards the set point. The process is waiting until it become stable. The set point test is run by increased the SP value from 25 to 27.5 kg/h and wait for the process until it became stable before proceed with the load disturbance test. By increase the MV value from 33.2 to 43.2, it can be seen that the process line will increase rapidly for a moment, then being decreased and become stable. For Air Pressure Control (PIC 92), value for controller gain, K c now is 2.71 and the value of integral time, I is s. The process curve is stable and reaches the set point. Then, continue with set point test by increased the value of set point from 9.8 to 11.0 psig. Once the process is stable, continue with load disturbance test by increase the MV value from 69.4 to 79.4%. For Flow Control (FIC 21), value for controller gain, K c now is and the value of integral time, I 4.16 s. Due to fluctuation and the response curve is not stable, then the value of K c is divided by 2, while the I value is multiply by 2, 26.70s. The response curve is now stable and near to the set point. Then, make the set point test by increase the set point from 3.99 to 4.39 m 3 /h. It can be observed the MV curve is increased rapidly before decreased and become stable. Once the process curve is stable, continue the test with load disturbance test by increasing the MV value from 64.6 to 74.6%. Set point is the desired value for the operating variable. After run the steady state experiment, the initial set point value was changed by an increment of 5%. These changes represent the situation in which the plant operator occasionally changes the value of set point and allows the considerable time for the control system to respond. In this experiment, all the graphs showed that the process line has the same reaction where it moves towards the set point and after a while it will reached stability where the process value and set point value is almost equal. Under load disturbance, the system will experienced disturbance that cause a large, sustained deviation of the controlled variable from its set point. In this test, the initial load disturbance value was also increased by 5%. Before entering the value, the system is change in manual mode and after the value was entered, the system is quickly changed back 25
25 into auto mode. Through the result, it can be seen that the longer time needed for the process line to return to the set point, the process will become more unfavourable since it affect the process line and also the production rate. The output lines also need to be considered because if the output line is not smooth and stable then the utilities are high. 5.0 CONCLUSION As a conclusion, this experiment had achieved its objective which is to find the optimum PI for Level Control Process (LIC 11), Air Flow Control (FIC 91), Air Pressure Control (PIC 92) and Flow Control (FIC 21) by using the Reformulated Tangent Method and by using Ziegler-Nichols tuning rules. When we increase the changing in MV value, the value of controller gain, K c will increase and can affect the respond of the process to become more faster and the process become more stable. By decreasing the controller gain, K c it also reduce the oscillatory and make the process become more stable. The integral time, I value is decreased and it accelerates the process to the set point. 26
26 6.0 References 1. Abdul Aziz Ishak & Muhammed Azlan Hussain, (2000). Reformulation of the tangent method for PID controller tuning. Process Control Engineering Online, May 2013, 2. Abdul Aziz Ishak (2011), Process Control Practices note Control/dp/ Astrom K., Hagglund T. (2006) Advanced PID Control, ISA, Research Triangle Park (Industrial application of PID) 7. Bohl A., McAvoy T. (1976) Linear feedback vs. time optimal control. II. The regulator problem, Ind. Eng. Chem., Process Des. Dev., Vol. 15, No. 1 (Industrial application of PID) 8. McMillan, G. (2004) Models Unleashed, ISA, Research Triangle Park (Industrial application of PID) 9. Ramon Vilanova, Antonio Visioli (2011), PID Control in the third Millennium: Lessons Learned and New Approaches, Springer. (Industrial application of PID) 10. McMillan G., (Dec. 8, 2010) Exceptional opportunities in process con-trol, ISA short course, Saint Louis (Industrial application of PID) 11. McMillan G., Baril R. (Aug. 2010) ph measurement and control, Chemi-cal Engineering (Industrial application of PID) 12. McMillan G., (Dec. 8, 2010) Exceptional opportunities in process con-trol, ISA short course, Saint Louis (Industrial application of PID) 13. McMillan G., (Dec. 9, 2010) Measurement and valve errors - Sources and impact, Emerson website entry, Austin (Industrial application of PID) 14. McMillan G., (Dec. 16, 2010) Star performers in minimizing life cycle costs, Emerson website entry, Austin 27
27 (Industrial application of PID) 15. McMillan, G. (2003) Advanced ph Measurement and Control, ISA, Re-search Triangle Park 16. McMillan G., (Aug. 2010) DeltaV v11 PID enhancements for wireless, Emerson white paper, Austin 17. Farhad Aslam, Mohd. Zeeshan Haider (2011) An implementation and Comparative Analysis of PID Controller and their Auto Tuning Method for Three Tank Liquid Level Control, International Journal of Computer Applications ( ), Vol Rajkumar Bansal, A. Patra, Vijay Bhuria (2012), Design of PID Controller for Plant Control and Comparison with Z-N PID Controller, International Journal of Emerging Technology and Advanced Engineering, Vol. 2, Issue Mr. S. S. Gade, Mr. S. B. Shendageand Mr. M. D. Uplane, On Line Auto Tuning of PID Controller Using Successive Approximation Method, 2010 International Conference on Recent Trends in Information, Telecommunication and Computing, pp Gade S.S, Kanase A B, ShendageS. B. and Uplane M. D., Design and Development of Universal on Line Auto Tune PID controllers, in Proc. Of Int. Conf. on Control, Communication and Power Engineering 2010, pp Vinay Gupta, AshisPatra, Design of Self-Tune PID Controller for Governor Control to Improve Dynamic Characteristics International Conference (ICITM-2011) to be held on 3rdJuly2011 at Ranchi, India 7.0 APPENDICES 28
28 7.0 APPENDICES 29
29 30

30 31
31 32
32 33
33 34
34 35
35 36
36 37
37 38
38 39

39 40

40 41
41 42
42 43
43 44
44 45
International Journal of Research in Advent Technology Available Online at:
 OVERVIEW OF DIFFERENT APPROACHES OF PID CONTROLLER TUNING Manju Kurien 1, Alka Prayagkar 2, Vaishali Rajeshirke 3 1 IS Department 2 IE Department 3 EV DEpartment VES Polytechnic, Chembur,Mumbai 1 manjulibu@gmail.com
OVERVIEW OF DIFFERENT APPROACHES OF PID CONTROLLER TUNING Manju Kurien 1, Alka Prayagkar 2, Vaishali Rajeshirke 3 1 IS Department 2 IE Department 3 EV DEpartment VES Polytechnic, Chembur,Mumbai 1 manjulibu@gmail.com
Experiment 9. PID Controller
 Experiment 9 PID Controller Objective: - To be familiar with PID controller. - Noting how changing PID controller parameter effect on system response. Theory: The basic function of a controller is to execute
Experiment 9 PID Controller Objective: - To be familiar with PID controller. - Noting how changing PID controller parameter effect on system response. Theory: The basic function of a controller is to execute
REFORMULATION OF THE TANGENT METHOD FOR PID CONTROLLER TUNING
 REFORMULTION OF THE TNGENT METHOD FOR PID ONTROLLER TUNING bdul ziz Ishak Muhammed zlan Hussain Department of hemical Engineering Faculty of Engineering, Universiti Malaya 50603 Kuala Lumpur, Malaysia.
REFORMULTION OF THE TNGENT METHOD FOR PID ONTROLLER TUNING bdul ziz Ishak Muhammed zlan Hussain Department of hemical Engineering Faculty of Engineering, Universiti Malaya 50603 Kuala Lumpur, Malaysia.
Different Controller Terms
 Loop Tuning Lab Challenges Not all PID controllers are the same. They don t all use the same units for P-I-and D. There are different types of processes. There are different final element types. There
Loop Tuning Lab Challenges Not all PID controllers are the same. They don t all use the same units for P-I-and D. There are different types of processes. There are different final element types. There
Procidia Control Solutions Dead Time Compensation
 APPLICATION DATA Procidia Control Solutions Dead Time Compensation AD353-127 Rev 2 April 2012 This application data sheet describes dead time compensation methods. A configuration can be developed within
APPLICATION DATA Procidia Control Solutions Dead Time Compensation AD353-127 Rev 2 April 2012 This application data sheet describes dead time compensation methods. A configuration can be developed within
CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING. Professor Dae Ryook Yang
 CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 11-1 Road Map of the Lecture XI Controller Design and PID
CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 11-1 Road Map of the Lecture XI Controller Design and PID
-binary sensors and actuators (such as an on/off controller) are generally more reliable and less expensive
 are generally more reliable and less expensive") Process controls are necessary for designing safe and productive plants. A variety of process controls are used to manipulate processes, however the most simple and often most effective is the PID controller.
Process controls are necessary for designing safe and productive plants. A variety of process controls are used to manipulate processes, however the most simple and often most effective is the PID controller.
Auto-tuning of PID Controller for the Cases Given by Forbes Marshall
 International Journal of Electronics Engineering Research. ISSN 0975-6450 Volume 9, Number 6 (2017) pp. 809-814 Research India Publications http://www.ripublication.com Auto-tuning of PID Controller for
International Journal of Electronics Engineering Research. ISSN 0975-6450 Volume 9, Number 6 (2017) pp. 809-814 Research India Publications http://www.ripublication.com Auto-tuning of PID Controller for
Find, read or write documentation which describes work of the control loop: Process Control Philosophy. Where the next information can be found:
 1 Controller uning o implement continuous control we should assemble a control loop which consists of the process/object, controller, sensors and actuators. Information about the control loop Find, read
1 Controller uning o implement continuous control we should assemble a control loop which consists of the process/object, controller, sensors and actuators. Information about the control loop Find, read
Level control drain valve tuning. Walter Bischoff PE Brunswick Nuclear Plant
 Level control drain valve tuning Walter Bischoff PE Brunswick Nuclear Plant Tuning Introduction Why is it important PI and PID controllers have been accepted throughout process design and all forms of
Level control drain valve tuning Walter Bischoff PE Brunswick Nuclear Plant Tuning Introduction Why is it important PI and PID controllers have been accepted throughout process design and all forms of
DeltaV v11 PID Enhancements for
 Aug 2010 Page 1 DeltaV v11 PID Enhancements for Wireless This document describes how enhancements to the PID block for wireless loops in DeltaV v11 improve performance, simplify tuning, and inherently
Aug 2010 Page 1 DeltaV v11 PID Enhancements for Wireless This document describes how enhancements to the PID block for wireless loops in DeltaV v11 improve performance, simplify tuning, and inherently
Relay Based Auto Tuner for Calibration of SCR Pump Controller Parameters in Diesel after Treatment Systems
 Abstract Available online at www.academicpaper.org Academic @ Paper ISSN 2146-9067 International Journal of Automotive Engineering and Technologies Special Issue 1, pp. 26 33, 2017 Original Research Article
Abstract Available online at www.academicpaper.org Academic @ Paper ISSN 2146-9067 International Journal of Automotive Engineering and Technologies Special Issue 1, pp. 26 33, 2017 Original Research Article
Design of an Intelligent Pressure Control System Based on the Fuzzy Self-tuning PID Controller
 Design of an Intelligent Pressure Control System Based on the Fuzzy Self-tuning PID Controller 1 Deepa S. Bhandare, 2 N. R.Kulkarni 1,2 Department of Electrical Engineering, Modern College of Engineering,
Design of an Intelligent Pressure Control System Based on the Fuzzy Self-tuning PID Controller 1 Deepa S. Bhandare, 2 N. R.Kulkarni 1,2 Department of Electrical Engineering, Modern College of Engineering,
Relay Feedback based PID Controller for Nonlinear Process
 Relay Feedback based PID Controller for Nonlinear Process I.Thirunavukkarasu, Dr.V.I.George, * and R.Satheeshbabu Abstract This work is about designing a relay feedback based PID controller for a conical
Relay Feedback based PID Controller for Nonlinear Process I.Thirunavukkarasu, Dr.V.I.George, * and R.Satheeshbabu Abstract This work is about designing a relay feedback based PID controller for a conical
CHAPTER 4 PID CONTROLLER BASED SPEED CONTROL OF THREE PHASE INDUCTION MOTOR
 36 CHAPTER 4 PID CONTROLLER BASED SPEED CONTROL OF THREE PHASE INDUCTION MOTOR 4.1 INTRODUCTION Now a day, a number of different controllers are used in the industry and in many other fields. In a quite
36 CHAPTER 4 PID CONTROLLER BASED SPEED CONTROL OF THREE PHASE INDUCTION MOTOR 4.1 INTRODUCTION Now a day, a number of different controllers are used in the industry and in many other fields. In a quite
Compensation of Dead Time in PID Controllers
 2006-12-06 Page 1 of 25 Compensation of Dead Time in PID Controllers Advanced Application Note 2006-12-06 Page 2 of 25 Table of Contents: 1 OVERVIEW...3 2 RECOMMENDATIONS...6 3 CONFIGURATION...7 4 TEST
2006-12-06 Page 1 of 25 Compensation of Dead Time in PID Controllers Advanced Application Note 2006-12-06 Page 2 of 25 Table of Contents: 1 OVERVIEW...3 2 RECOMMENDATIONS...6 3 CONFIGURATION...7 4 TEST
Simulation and Analysis of Cascaded PID Controller Design for Boiler Pressure Control System
 PAPER ID: IJIFR / V1 / E10 / 031 www.ijifr.com ijifr.journal@gmail.com ISSN (Online): 2347-1697 An Enlightening Online Open Access, Refereed & Indexed Journal of Multidisciplinary Research Simulation and
PAPER ID: IJIFR / V1 / E10 / 031 www.ijifr.com ijifr.journal@gmail.com ISSN (Online): 2347-1697 An Enlightening Online Open Access, Refereed & Indexed Journal of Multidisciplinary Research Simulation and
Comparative Study of PID Controller tuning methods using ASPEN HYSYS
 Comparative Study of PID Controller tuning methods using ASPEN HYSYS Bhavatharini S #1, Abirami S #2, Arun Prem Anand N #3 # Department of Chemical Engineering, Sri Venkateswara College of Engineering
Comparative Study of PID Controller tuning methods using ASPEN HYSYS Bhavatharini S #1, Abirami S #2, Arun Prem Anand N #3 # Department of Chemical Engineering, Sri Venkateswara College of Engineering
Simulation of process identification and controller tuning for flow control system
 IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Simulation of process identification and controller tuning for flow control system To cite this article: I M Chew et al 2017 IOP
IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Simulation of process identification and controller tuning for flow control system To cite this article: I M Chew et al 2017 IOP
Think About Control Fundamentals Training. Terminology Control. Eko Harsono Control Fundamental
 Think About Control Fundamentals Training Terminology Control Eko Harsono eko.harsononus@gmail.com; 1 Contents Topics: Slide No: Process Control Terminology 3-10 Control Principles 11-18 Basic Control
Think About Control Fundamentals Training Terminology Control Eko Harsono eko.harsononus@gmail.com; 1 Contents Topics: Slide No: Process Control Terminology 3-10 Control Principles 11-18 Basic Control
Getting the Best Performance from Challenging Control Loops
 Getting the Best Performance from Challenging Control Loops Jacques F. Smuts - OptiControls Inc, League City, Texas; jsmuts@opticontrols.com KEYWORDS PID Controls, Oscillations, Disturbances, Tuning, Stiction,
Getting the Best Performance from Challenging Control Loops Jacques F. Smuts - OptiControls Inc, League City, Texas; jsmuts@opticontrols.com KEYWORDS PID Controls, Oscillations, Disturbances, Tuning, Stiction,
F. Greg Shinskey. "PID Control." Copyright 2000 CRC Press LLC. <
 F. Greg Shinskey. "PID Control." Copyright 2000 CRC Press LLC. . PID Control F. Greg Shinskey Process Control Consultant 97.1 Introduction 97.2 Open and Closed Loops Open-Loop
F. Greg Shinskey. "PID Control." Copyright 2000 CRC Press LLC. . PID Control F. Greg Shinskey Process Control Consultant 97.1 Introduction 97.2 Open and Closed Loops Open-Loop
Temperature Control in HVAC Application using PID and Self-Tuning Adaptive Controller
 International Journal of Emerging Trends in Science and Technology Temperature Control in HVAC Application using PID and Self-Tuning Adaptive Controller Authors Swarup D. Ramteke 1, Bhagsen J. Parvat 2
International Journal of Emerging Trends in Science and Technology Temperature Control in HVAC Application using PID and Self-Tuning Adaptive Controller Authors Swarup D. Ramteke 1, Bhagsen J. Parvat 2
Comparative Study of PID and FOPID Controller Response for Automatic Voltage Regulation
 IOSR Journal of Engineering (IOSRJEN) ISSN (e): 2250-3021, ISSN (p): 2278-8719 Vol. 04, Issue 09 (September. 2014), V5 PP 41-48 www.iosrjen.org Comparative Study of PID and FOPID Controller Response for
IOSR Journal of Engineering (IOSRJEN) ISSN (e): 2250-3021, ISSN (p): 2278-8719 Vol. 04, Issue 09 (September. 2014), V5 PP 41-48 www.iosrjen.org Comparative Study of PID and FOPID Controller Response for
BINARY DISTILLATION COLUMN CONTROL TECHNIQUES: A COMPARATIVE STUDY
 BINARY DISTILLATION COLUMN CONTROL TECHNIQUES: A COMPARATIVE STUDY 1 NASSER MOHAMED RAMLI, 2 MOHAMMED ABOBAKR BASAAR 1,2 Chemical Engineering Department, Faculty of Engineering, Universiti Teknologi PETRONAS,
BINARY DISTILLATION COLUMN CONTROL TECHNIQUES: A COMPARATIVE STUDY 1 NASSER MOHAMED RAMLI, 2 MOHAMMED ABOBAKR BASAAR 1,2 Chemical Engineering Department, Faculty of Engineering, Universiti Teknologi PETRONAS,
Control Theory. This course will examine the control functions found in HVAC systems and explain the different applications where they are applied.
 Introduction The purpose of automatic HVAC system control is to modify equipment performance to balance system capacity with prevailing load requirements. All automatic control systems do not employ the
Introduction The purpose of automatic HVAC system control is to modify equipment performance to balance system capacity with prevailing load requirements. All automatic control systems do not employ the
PID Controller Tuning Optimization with BFO Algorithm in AVR System
 PID Controller Tuning Optimization with BFO Algorithm in AVR System G. Madasamy Lecturer, Department of Electrical and Electronics Engineering, P.A.C. Ramasamy Raja Polytechnic College, Rajapalayam Tamilnadu,
PID Controller Tuning Optimization with BFO Algorithm in AVR System G. Madasamy Lecturer, Department of Electrical and Electronics Engineering, P.A.C. Ramasamy Raja Polytechnic College, Rajapalayam Tamilnadu,
MM7 Practical Issues Using PID Controllers
 MM7 Practical Issues Using PID Controllers Readings: FC textbook: Section 4.2.7 Integrator Antiwindup p.196-200 Extra reading: Hou Ming s lecture notes p.60-69 Extra reading: M.J. Willis notes on PID controler
MM7 Practical Issues Using PID Controllers Readings: FC textbook: Section 4.2.7 Integrator Antiwindup p.196-200 Extra reading: Hou Ming s lecture notes p.60-69 Extra reading: M.J. Willis notes on PID controler
Design of Model Based PID Controller Tuning for Pressure Process
 ISSN (Print) : 3 3765 Design of Model Based PID Controller Tuning for Pressure Process A.Kanchana 1, G.Lavanya, R.Nivethidha 3, S.Subasree 4, P.Aravind 5 UG student, Dept. of ICE, Saranathan College Engineering,
ISSN (Print) : 3 3765 Design of Model Based PID Controller Tuning for Pressure Process A.Kanchana 1, G.Lavanya, R.Nivethidha 3, S.Subasree 4, P.Aravind 5 UG student, Dept. of ICE, Saranathan College Engineering,
EMPIRICAL MODEL IDENTIFICATION AND PID CONTROLLER TUNING FOR A FLOW PROCESS
 Volume 118 No. 20 2018, 2015-2021 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu EMPIRICAL MODEL IDENTIFICATION AND PID CONTROLLER TUNING FOR A FLOW
Volume 118 No. 20 2018, 2015-2021 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu EMPIRICAL MODEL IDENTIFICATION AND PID CONTROLLER TUNING FOR A FLOW
TUNING OF PID CONTROLLER USING PSO AND ITS PERFORMANCES ON ELECTRO-HYDRAULIC SERVO SYSTEM
 TUNING OF PID CONTROLLER USING PSO AND ITS PERFORMANCES ON ELECTRO-HYDRAULIC SERVO SYSTEM Neha Tandan 1, Kuldeep Kumar Swarnkar 2 1,2 Electrical Engineering Department 1,2, MITS, Gwalior Abstract PID controllers
TUNING OF PID CONTROLLER USING PSO AND ITS PERFORMANCES ON ELECTRO-HYDRAULIC SERVO SYSTEM Neha Tandan 1, Kuldeep Kumar Swarnkar 2 1,2 Electrical Engineering Department 1,2, MITS, Gwalior Abstract PID controllers
SCIENCE & TECHNOLOGY
 Pertanika J. Sci. & Technol. 25 (S): 259-268 (2017) SCIENCE & TECHNOLOGY Journal homepage: http://www.pertanika.upm.edu.my/ Ziegler-Nichols First Tuning Method for Air Blower PT326 Mahanijah Md Kamal*
Pertanika J. Sci. & Technol. 25 (S): 259-268 (2017) SCIENCE & TECHNOLOGY Journal homepage: http://www.pertanika.upm.edu.my/ Ziegler-Nichols First Tuning Method for Air Blower PT326 Mahanijah Md Kamal*
Neural Network Predictive Controller for Pressure Control
 Neural Network Predictive Controller for Pressure Control ZAZILAH MAY 1, MUHAMMAD HANIF AMARAN 2 Department of Electrical and Electronics Engineering Universiti Teknologi PETRONAS Bandar Seri Iskandar,
Neural Network Predictive Controller for Pressure Control ZAZILAH MAY 1, MUHAMMAD HANIF AMARAN 2 Department of Electrical and Electronics Engineering Universiti Teknologi PETRONAS Bandar Seri Iskandar,
CHAPTER 11: DIGITAL CONTROL
 When I complete this chapter, I want to be able to do the following. Identify examples of analog and digital computation and signal transmission. Program a digital PID calculation Select a proper execution
When I complete this chapter, I want to be able to do the following. Identify examples of analog and digital computation and signal transmission. Program a digital PID calculation Select a proper execution
MODEL BASED CONTROL FOR INTERACTING AND NON-INTERACTING LEVEL PROCESS USING LABVIEW
 MODEL BASED CONTROL FOR INTERACTING AND NON-INTERACTING LEVEL PROCESS USING LABVIEW M.Lavanya 1, P.Aravind 2, M.Valluvan 3, Dr.B.Elizabeth Caroline 4 PG Scholar[AE], Dept. of ECE, J.J. College of Engineering&
MODEL BASED CONTROL FOR INTERACTING AND NON-INTERACTING LEVEL PROCESS USING LABVIEW M.Lavanya 1, P.Aravind 2, M.Valluvan 3, Dr.B.Elizabeth Caroline 4 PG Scholar[AE], Dept. of ECE, J.J. College of Engineering&
Fundamentals of Servo Motion Control
 Fundamentals of Servo Motion Control The fundamental concepts of servo motion control have not changed significantly in the last 50 years. The basic reasons for using servo systems in contrast to open
Fundamentals of Servo Motion Control The fundamental concepts of servo motion control have not changed significantly in the last 50 years. The basic reasons for using servo systems in contrast to open
A Comparative Novel Method of Tuning of Controller for Temperature Process
 A Comparative Novel Method of Tuning of Controller for Temperature Process E.Kalaiselvan 1, J. Dominic Tagore 2 Associate Professor, Department of E.I.E, M.A.M College Of Engineering, Trichy, Tamilnadu,
A Comparative Novel Method of Tuning of Controller for Temperature Process E.Kalaiselvan 1, J. Dominic Tagore 2 Associate Professor, Department of E.I.E, M.A.M College Of Engineering, Trichy, Tamilnadu,
The PID controller. Summary. Introduction to Control Systems
 The PID controller ISTTOK real-time AC 7-10-2010 Summary Introduction to Control Systems PID Controller PID Tuning Discrete-time Implementation The PID controller 2 Introduction to Control Systems Some
The PID controller ISTTOK real-time AC 7-10-2010 Summary Introduction to Control Systems PID Controller PID Tuning Discrete-time Implementation The PID controller 2 Introduction to Control Systems Some
Enhance operational efficiency with Advanced Process Control (APC) Integration of APC in SIMATIC PCS 7 SIMATIC PCS 7. Answers for industry.
 Integration of APC in SIMATIC PCS 7 SIMATIC PCS 7. Answers for industry.") Enhance operational efficiency with Advanced Control (APC) Integration of APC in SIMATIC PCS 7 SIMATIC PCS 7 Answers for industry. Modern closed-loop control systems in the process industry In today s
Enhance operational efficiency with Advanced Control (APC) Integration of APC in SIMATIC PCS 7 SIMATIC PCS 7 Answers for industry. Modern closed-loop control systems in the process industry In today s
Process controls in food processing
 Process controls in food processing Module- 9 Lec- 9 Dr. Shishir Sinha Dept. of Chemical Engineering IIT Roorkee A well designed process ought to be easy to control. More importantly, it is best to consider
Process controls in food processing Module- 9 Lec- 9 Dr. Shishir Sinha Dept. of Chemical Engineering IIT Roorkee A well designed process ought to be easy to control. More importantly, it is best to consider
INTEGRATED PID BASED INTELLIGENT CONTROL FOR THREE TANK SYSTEM
 INTEGRATED PID BASED INTELLIGENT CONTROL FOR THREE TANK SYSTEM J. Arulvadivu, N. Divya and S. Manoharan Electronics and Instrumentation Engineering, Karpagam College of Engineering, Coimbatore, Tamilnadu,
INTEGRATED PID BASED INTELLIGENT CONTROL FOR THREE TANK SYSTEM J. Arulvadivu, N. Divya and S. Manoharan Electronics and Instrumentation Engineering, Karpagam College of Engineering, Coimbatore, Tamilnadu,
Effective Use of PID Features for Loop Performance and Optimization. Greg McMillan CDI Process & Industrial Hector Torres Solutia Inc.
 Effective Use of PID Features for Loop Performance and Optimization Greg McMillan CDI Process & Industrial Hector Torres Solutia Inc. Photography & Video Recording Policy Photography and audio/video recording
Effective Use of PID Features for Loop Performance and Optimization Greg McMillan CDI Process & Industrial Hector Torres Solutia Inc. Photography & Video Recording Policy Photography and audio/video recording
Class 5. Competency Exam Round 1. The Process Designer s Process. Process Control Preliminaries. On/Off Control The Simplest Controller
 Class 5 Competency Exam Round 1 Proportional Control Starts Friday, September 17 Ends Friday, October 1 Process Control Preliminaries The final control element, process and sensor/transmitter all have
Class 5 Competency Exam Round 1 Proportional Control Starts Friday, September 17 Ends Friday, October 1 Process Control Preliminaries The final control element, process and sensor/transmitter all have
Some Tuning Methods of PID Controller For Different Processes
 International Conference on Information Engineering, Management and Security [ICIEMS] 282 International Conference on Information Engineering, Management and Security 2015 [ICIEMS 2015] ISBN 978-81-929742-7-9
International Conference on Information Engineering, Management and Security [ICIEMS] 282 International Conference on Information Engineering, Management and Security 2015 [ICIEMS 2015] ISBN 978-81-929742-7-9
A Rule Based Design Methodology for the Control of Non Self-Regulating Processes
 contents A Rule Based Design Methodology for the Control of Non Self-Regulating Processes Robert Rice Research Assistant Dept. Of Chemical Engineering University of Connecticut Storrs, CT 06269-3222 Douglas
contents A Rule Based Design Methodology for the Control of Non Self-Regulating Processes Robert Rice Research Assistant Dept. Of Chemical Engineering University of Connecticut Storrs, CT 06269-3222 Douglas
Non Linear Tank Level Control using LabVIEW Jagatis Kumaar B 1 Vinoth K 2 Vivek Vijayan C 3 P Aravind 4
 IJSRD - International Journal for Scientific Research & Development Vol. 3, Issue 01, 2015 ISSN (online): 2321-0613 Non Linear Tank Level Control using LabVIEW Jagatis Kumaar B 1 Vinoth K 2 Vivek Vijayan
IJSRD - International Journal for Scientific Research & Development Vol. 3, Issue 01, 2015 ISSN (online): 2321-0613 Non Linear Tank Level Control using LabVIEW Jagatis Kumaar B 1 Vinoth K 2 Vivek Vijayan
ChE 4162 Control Laboratory Methodologies Fall Control Laboratory Methodologies
 Control Laboratory Methodologies Edited by: HJT from Material by DBM 1/11 9/23/2016 1. Introduction There seem to be about as many ways to study and tune control systems as there are control engineers.
Control Laboratory Methodologies Edited by: HJT from Material by DBM 1/11 9/23/2016 1. Introduction There seem to be about as many ways to study and tune control systems as there are control engineers.
DESIGN AND ANALYSIS OF TUNING TECHNIQUES USING DIFFERENT CONTROLLERS OF A SECOND ORDER PROCESS
 Journal of Electrical Engineering & Technology (JEET) Volume 3, Issue 1, January- December 2018, pp. 1 6, Article ID: JEET_03_01_001 Available online at http://www.iaeme.com/jeet/issues.asp?jtype=jeet&vtype=3&itype=1
Journal of Electrical Engineering & Technology (JEET) Volume 3, Issue 1, January- December 2018, pp. 1 6, Article ID: JEET_03_01_001 Available online at http://www.iaeme.com/jeet/issues.asp?jtype=jeet&vtype=3&itype=1
CONTROLLER TUNING FOR NONLINEAR HOPPER PROCESS TANK A REAL TIME ANALYSIS
 Journal of Engineering Science and Technology EURECA 2013 Special Issue August (2014) 59-67 School of Engineering, Taylor s University CONTROLLER TUNING FOR NONLINEAR HOPPER PROCESS TANK A REAL TIME ANALYSIS
Journal of Engineering Science and Technology EURECA 2013 Special Issue August (2014) 59-67 School of Engineering, Taylor s University CONTROLLER TUNING FOR NONLINEAR HOPPER PROCESS TANK A REAL TIME ANALYSIS
InstrumentationTools.com
 Author: Instrumentation Tools Categories: Control Systems Ziegler-Nichols Closed-Loop Method (Ultimate Gain) Closed-loop refers to the operation of a control system with the controlling device in automatic
Author: Instrumentation Tools Categories: Control Systems Ziegler-Nichols Closed-Loop Method (Ultimate Gain) Closed-loop refers to the operation of a control system with the controlling device in automatic
Optimize Your Process Using Normal Operation Data
 Optimize Your Process Using Normal Operation Data Michel Ruel, PE Top Control, Inc. 49, rue du Bel-Air, bur.103, Lévis, QC G6V 6K9, Canada Phone +1.418.834.2242, michel.ruel@topcontrol.com Henri (Hank)
Optimize Your Process Using Normal Operation Data Michel Ruel, PE Top Control, Inc. 49, rue du Bel-Air, bur.103, Lévis, QC G6V 6K9, Canada Phone +1.418.834.2242, michel.ruel@topcontrol.com Henri (Hank)
Single Input ph/redox (ORP) Analyzer
 Analyzer") User Guide PID Control Supplement IM/AX4PID_5 Single Input ph/redox (ORP) Analyzer AX460 ABB The Company BS EN ISO 9001:2000 We are an established world force in the design and manufacture of instrumentation
User Guide PID Control Supplement IM/AX4PID_5 Single Input ph/redox (ORP) Analyzer AX460 ABB The Company BS EN ISO 9001:2000 We are an established world force in the design and manufacture of instrumentation
PID TUNING WITH INPUT CONSTRAINT: APPLICATION ON FOOD PROCESSING
 83 PID TUNING WITH INPUT CONSTRAINT: APPLICATION ON FOOD PROCESSING B L Chua 1, F.S.Tai 1, N.A.Aziz 1 and T.S.Y Choong 2 1 Department of Process and Food Engineering, 2 Department of Chemical and Environmental
83 PID TUNING WITH INPUT CONSTRAINT: APPLICATION ON FOOD PROCESSING B L Chua 1, F.S.Tai 1, N.A.Aziz 1 and T.S.Y Choong 2 1 Department of Process and Food Engineering, 2 Department of Chemical and Environmental
Tuning interacting PID loops. The end of an era for the trial and error approach
 Tuning interacting PID loops The end of an era for the trial and error approach Introduction Almost all actuators and instruments in the industry that are part of a control system are controlled by a PI(D)
Tuning interacting PID loops The end of an era for the trial and error approach Introduction Almost all actuators and instruments in the industry that are part of a control system are controlled by a PI(D)
CHAPTER 2 PID CONTROLLER BASED CLOSED LOOP CONTROL OF DC DRIVE
 23 CHAPTER 2 PID CONTROLLER BASED CLOSED LOOP CONTROL OF DC DRIVE 2.1 PID CONTROLLER A proportional Integral Derivative controller (PID controller) find its application in industrial control system. It
23 CHAPTER 2 PID CONTROLLER BASED CLOSED LOOP CONTROL OF DC DRIVE 2.1 PID CONTROLLER A proportional Integral Derivative controller (PID controller) find its application in industrial control system. It
TUNING OF PID CONTROLLERS USING PARTICLE SWARM OPTIMIZATION
 TUNING OF PID CONTROLLERS USING PARTICLE SWARM OPTIMIZATION 1 K.LAKSHMI SOWJANYA, 2 L.RAVI SRINIVAS M.Tech Student, Department of Electrical & Electronics Engineering, Gudlavalleru Engineering College,
TUNING OF PID CONTROLLERS USING PARTICLE SWARM OPTIMIZATION 1 K.LAKSHMI SOWJANYA, 2 L.RAVI SRINIVAS M.Tech Student, Department of Electrical & Electronics Engineering, Gudlavalleru Engineering College,
Various Controller Design and Tuning Methods for a First Order Plus Dead Time Process
 International Journal of Computer Science & Communication Vol. 1, No. 2, July-December 2010, pp. 161-165 Various Controller Design and Tuning Methods for a First Order Plus Dead Time Process Pradeep Kumar
International Journal of Computer Science & Communication Vol. 1, No. 2, July-December 2010, pp. 161-165 Various Controller Design and Tuning Methods for a First Order Plus Dead Time Process Pradeep Kumar
Design and Analysis for Robust PID Controller
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 4 Ver. III (Jul Aug. 2014), PP 28-34 Jagriti Pandey 1, Aashish Hiradhar 2 Department
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 4 Ver. III (Jul Aug. 2014), PP 28-34 Jagriti Pandey 1, Aashish Hiradhar 2 Department
Md. Aftab Alam, Dr. Ramjee Parsad Gupta IJSRE Volume 4 Issue 7 July 2016 Page 5537
 Volume 4 Issue 07 July-2016 Pages-5537-5550 ISSN(e):2321-7545 Website: http://ijsae.in DOI: http://dx.doi.org/10.18535/ijsre/v4i07.12 Simulation of Intelligent Controller for Temperature of Heat Exchanger
Volume 4 Issue 07 July-2016 Pages-5537-5550 ISSN(e):2321-7545 Website: http://ijsae.in DOI: http://dx.doi.org/10.18535/ijsre/v4i07.12 Simulation of Intelligent Controller for Temperature of Heat Exchanger
Loop Design. Chapter Introduction
 Chapter 8 Loop Design 8.1 Introduction This is the first Chapter that deals with design and we will therefore start by some general aspects on design of engineering systems. Design is complicated because
Chapter 8 Loop Design 8.1 Introduction This is the first Chapter that deals with design and we will therefore start by some general aspects on design of engineering systems. Design is complicated because
Modelling for Temperature Non-Isothermal Continuous Stirred Tank Reactor Using Fuzzy Logic
 Modelling for Temperature Non-Isothermal Continuous Stirred Tank Reactor Using Fuzzy Logic Nasser Mohamed Ramli, Mohamad Syafiq Mohamad 1 Abstract Many types of controllers were applied on the continuous
Modelling for Temperature Non-Isothermal Continuous Stirred Tank Reactor Using Fuzzy Logic Nasser Mohamed Ramli, Mohamad Syafiq Mohamad 1 Abstract Many types of controllers were applied on the continuous
Module 08 Controller Designs: Compensators and PIDs
 Module 08 Controller Designs: Compensators and PIDs Ahmad F. Taha EE 3413: Analysis and Desgin of Control Systems Email: ahmad.taha@utsa.edu Webpage: http://engineering.utsa.edu/ taha March 31, 2016 Ahmad
Module 08 Controller Designs: Compensators and PIDs Ahmad F. Taha EE 3413: Analysis and Desgin of Control Systems Email: ahmad.taha@utsa.edu Webpage: http://engineering.utsa.edu/ taha March 31, 2016 Ahmad
Logic Developer Process Edition Function Blocks
 GE Intelligent Platforms Logic Developer Process Edition Function Blocks Delivering increased precision and enabling advanced regulatory control strategies for continuous process control Logic Developer
GE Intelligent Platforms Logic Developer Process Edition Function Blocks Delivering increased precision and enabling advanced regulatory control strategies for continuous process control Logic Developer
Linear Control Systems Lectures #5 - PID Controller. Guillaume Drion Academic year
 Linear Control Systems Lectures #5 - PID Controller Guillaume Drion Academic year 2018-2019 1 Outline PID controller: general form Effects of the proportional, integral and derivative actions PID tuning
Linear Control Systems Lectures #5 - PID Controller Guillaume Drion Academic year 2018-2019 1 Outline PID controller: general form Effects of the proportional, integral and derivative actions PID tuning
PID control. since Similarly, modern industrial
 Control basics Introduction to For deeper understanding of their usefulness, we deconstruct P, I, and D control functions. PID control Paul Avery Senior Product Training Engineer Yaskawa Electric America,
Control basics Introduction to For deeper understanding of their usefulness, we deconstruct P, I, and D control functions. PID control Paul Avery Senior Product Training Engineer Yaskawa Electric America,
6545(Print), ISSN (Online) Volume 4, Issue 1, January- February (2013), IAEME & TECHNOLOGY (IJEET)
, ISSN (Online) Volume 4, Issue 1, January- February (2013), IAEME & TECHNOLOGY (IJEET)") INTERNATIONAL International Journal of JOURNAL Electrical Engineering OF ELECTRICAL and Technology (IJEET), ENGINEERING ISSN 0976 & TECHNOLOGY (IJEET) ISSN 0976 6545(Print) ISSN 0976 6553(Online) Volume
INTERNATIONAL International Journal of JOURNAL Electrical Engineering OF ELECTRICAL and Technology (IJEET), ENGINEERING ISSN 0976 & TECHNOLOGY (IJEET) ISSN 0976 6545(Print) ISSN 0976 6553(Online) Volume
Research Article Multi-objective PID Optimization for Speed Control of an Isolated Steam Turbine using Gentic Algorithm
 Research Journal of Applied Sciences, Engineering and Technology 7(17): 3441-3445, 14 DOI:1.196/rjaset.7.695 ISSN: 4-7459; e-issn: 4-7467 14 Maxwell Scientific Publication Corp. Submitted: May, 13 Accepted:
Research Journal of Applied Sciences, Engineering and Technology 7(17): 3441-3445, 14 DOI:1.196/rjaset.7.695 ISSN: 4-7459; e-issn: 4-7467 14 Maxwell Scientific Publication Corp. Submitted: May, 13 Accepted:
Comparison Effectiveness of PID, Self-Tuning and Fuzzy Logic Controller in Heat Exchanger
 J. Appl. Environ. Biol. Sci., 7(4S)28-33, 2017 2017, TextRoad Publication ISSN: 2090-4274 Journal of Applied Environmental and Biological Sciences www.textroad.com Comparison Effectiveness of PID, Self-Tuning
J. Appl. Environ. Biol. Sci., 7(4S)28-33, 2017 2017, TextRoad Publication ISSN: 2090-4274 Journal of Applied Environmental and Biological Sciences www.textroad.com Comparison Effectiveness of PID, Self-Tuning
Modified ultimate cycle method relay auto-tuning
 Adaptive Control - Autotuning Structure of presentation: Relay feedback autotuning outline Relay feedback autotuning details How close is the estimate of the ultimate gain and period to the actual ultimate
Adaptive Control - Autotuning Structure of presentation: Relay feedback autotuning outline Relay feedback autotuning details How close is the estimate of the ultimate gain and period to the actual ultimate
PROCESS DYNAMICS AND CONTROL
 Objectives of the Class PROCESS DYNAMICS AND CONTROL CHBE320, Spring 2018 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering What is process control? Basics of process control Basic hardware
Objectives of the Class PROCESS DYNAMICS AND CONTROL CHBE320, Spring 2018 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering What is process control? Basics of process control Basic hardware
ADVANCES in NATURAL and APPLIED SCIENCES
 ADVANCES in NATURAL and APPLIED SCIENCES ISSN: 1995-0772 Published BYAENSI Publication EISSN: 1998-1090 http://www.aensiweb.com/anas 2017 Special 11(5): pages 129-137 Open Access Journal Comparison of
ADVANCES in NATURAL and APPLIED SCIENCES ISSN: 1995-0772 Published BYAENSI Publication EISSN: 1998-1090 http://www.aensiweb.com/anas 2017 Special 11(5): pages 129-137 Open Access Journal Comparison of
EVALUATION ALGORITHM- BASED ON PID CONTROLLER DESIGN FOR THE UNSTABLE SYSTEMS
 EVALUATION ALGORITHM- BASED ON PID CONTROLLER DESIGN FOR THE UNSTABLE SYSTEMS Erliza Binti Serri 1, Wan Ismail Ibrahim 1 and Mohd Riduwan Ghazali 2 1 Sustanable Energy & Power Electronics Research, FKEE
EVALUATION ALGORITHM- BASED ON PID CONTROLLER DESIGN FOR THE UNSTABLE SYSTEMS Erliza Binti Serri 1, Wan Ismail Ibrahim 1 and Mohd Riduwan Ghazali 2 1 Sustanable Energy & Power Electronics Research, FKEE
Performance Analysis of Conventional Controllers for Automatic Voltage Regulator (AVR)
") Performance Analysis of Conventional Controllers for Automatic Voltage Regulator (AVR) Ajit Kumar Mittal M.TECH Student, B.I.T SINDRI Dhanbad, India Dr. Pankaj Rai Associate Professor, Department of Electrical
Performance Analysis of Conventional Controllers for Automatic Voltage Regulator (AVR) Ajit Kumar Mittal M.TECH Student, B.I.T SINDRI Dhanbad, India Dr. Pankaj Rai Associate Professor, Department of Electrical
Paul Schafbuch. Senior Research Engineer Fisher Controls International, Inc.
 Paul Schafbuch Senior Research Engineer Fisher Controls International, Inc. Introduction Achieving optimal control system performance keys on selecting or specifying the proper flow characteristic. Therefore,
Paul Schafbuch Senior Research Engineer Fisher Controls International, Inc. Introduction Achieving optimal control system performance keys on selecting or specifying the proper flow characteristic. Therefore,
Hacettepe University, Ankara, Turkey. 2 Chemical Engineering Department,
 OPTIMAL TUNING PARAMETERS OF PROPORTIONAL INTEGRAL CONTROLLER IN FEEDBACK CONTROL SYSTEMS. Gamze İŞ 1, ChandraMouli Madhuranthakam 2, Erdoğan Alper 1, Ibrahim H. Mustafa 2,3, Ali Elkamel 2 1 Chemical Engineering
OPTIMAL TUNING PARAMETERS OF PROPORTIONAL INTEGRAL CONTROLLER IN FEEDBACK CONTROL SYSTEMS. Gamze İŞ 1, ChandraMouli Madhuranthakam 2, Erdoğan Alper 1, Ibrahim H. Mustafa 2,3, Ali Elkamel 2 1 Chemical Engineering
PROCESS DYNAMICS AND CONTROL
 PROCESS DYNAMICS AND CONTROL CHBE306, Fall 2017 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering Korea University Korea University 1-1 Objectives of the Class What is process control?
PROCESS DYNAMICS AND CONTROL CHBE306, Fall 2017 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering Korea University Korea University 1-1 Objectives of the Class What is process control?
Chapter 4 PID Design Example
 Chapter 4 PID Design Example I illustrate the principles of feedback control with an example. We start with an intrinsic process P(s) = ( )( ) a b ab = s + a s + b (s + a)(s + b). This process cascades
Chapter 4 PID Design Example I illustrate the principles of feedback control with an example. We start with an intrinsic process P(s) = ( )( ) a b ab = s + a s + b (s + a)(s + b). This process cascades
New PID Tuning Rule Using ITAE Criteria
 New PID Tuning Rule Using ITAE Criteria Ala Eldin Abdallah Awouda Department of Mechatronics and Robotics, Faculty of Electrical Engineering, Universiti Teknologi Malaysia, Johor, 83100, Malaysia rosbi@fke.utm.my
New PID Tuning Rule Using ITAE Criteria Ala Eldin Abdallah Awouda Department of Mechatronics and Robotics, Faculty of Electrical Engineering, Universiti Teknologi Malaysia, Johor, 83100, Malaysia rosbi@fke.utm.my
Design and Implementation of Self-Tuning Fuzzy-PID Controller for Process Liquid Level Control
 Design and Implementation of Self-Tuning Fuzzy-PID Controller for Process Liquid Level Control 1 Deepa Shivshant Bhandare, 2 Hafiz Shaikh and 3 N. R. Kulkarni 1,2,3 Department of Electrical Engineering,
Design and Implementation of Self-Tuning Fuzzy-PID Controller for Process Liquid Level Control 1 Deepa Shivshant Bhandare, 2 Hafiz Shaikh and 3 N. R. Kulkarni 1,2,3 Department of Electrical Engineering,
PID Controller tuning and implementation aspects for building thermal control
 PID Controller tuning and implementation aspects for building thermal control Kafetzis G. (Technical University of Crete) Patelis P. (Technical University of Crete) Tripolitakis E.I. (Technical University
PID Controller tuning and implementation aspects for building thermal control Kafetzis G. (Technical University of Crete) Patelis P. (Technical University of Crete) Tripolitakis E.I. (Technical University
Feedforward and Ratio Control
 Feedforward and Ratio ISA Mentor Program Presentation by: Gregory K. McMillan Standards Certification Education & Training Publishing Conferences & Exhibits Presenter Gregory K. McMillan is a retired Senior
Feedforward and Ratio ISA Mentor Program Presentation by: Gregory K. McMillan Standards Certification Education & Training Publishing Conferences & Exhibits Presenter Gregory K. McMillan is a retired Senior
Determining the Dynamic Characteristics of a Process
 Exercise 1-1 Determining the Dynamic Characteristics of a Process EXERCISE OBJECTIVE Familiarize yourself with three methods to determine the dynamic characteristics of a process. DISCUSSION OUTLINE The
Exercise 1-1 Determining the Dynamic Characteristics of a Process EXERCISE OBJECTIVE Familiarize yourself with three methods to determine the dynamic characteristics of a process. DISCUSSION OUTLINE The
Comparative Analysis of a PID Controller using Ziegler- Nichols and Auto Turning Method
 International Academic Institute for Science and Technology International Academic Journal of Science and Engineering Vol. 3, No. 10, 2016, pp. 1-16. ISSN 2454-3896 International Academic Journal of Science
International Academic Institute for Science and Technology International Academic Journal of Science and Engineering Vol. 3, No. 10, 2016, pp. 1-16. ISSN 2454-3896 International Academic Journal of Science
A Case Study in Modeling and Process Control: the Control of a Pilot Scale Heating and Ventilation System
 Dublin Institute of Technology ARROW@DIT Conference papers School of Electrical and Electronic Engineering 2006-01-01 A Case Study in Modeling and Process Control: the Control of a Pilot Scale Heating
Dublin Institute of Technology ARROW@DIT Conference papers School of Electrical and Electronic Engineering 2006-01-01 A Case Study in Modeling and Process Control: the Control of a Pilot Scale Heating
CHAPTER 4 AN EFFICIENT ANFIS BASED SELF TUNING OF PI CONTROLLER FOR CURRENT HARMONIC MITIGATION
 92 CHAPTER 4 AN EFFICIENT ANFIS BASED SELF TUNING OF PI CONTROLLER FOR CURRENT HARMONIC MITIGATION 4.1 OVERVIEW OF PI CONTROLLER Proportional Integral (PI) controllers have been developed due to the unique
92 CHAPTER 4 AN EFFICIENT ANFIS BASED SELF TUNING OF PI CONTROLLER FOR CURRENT HARMONIC MITIGATION 4.1 OVERVIEW OF PI CONTROLLER Proportional Integral (PI) controllers have been developed due to the unique
DESIGN AND VALIDATION OF A PID AUTO-TUNING ALGORITHM
 DESIGN AND VALIDATION OF A PID AUTO-TUNING ALGORITHM Diego F. Sendoya-Losada and Jesús D. Quintero-Polanco Department of Electronic Engineering, Faculty of Engineering, Surcolombiana University, Neiva,
DESIGN AND VALIDATION OF A PID AUTO-TUNING ALGORITHM Diego F. Sendoya-Losada and Jesús D. Quintero-Polanco Department of Electronic Engineering, Faculty of Engineering, Surcolombiana University, Neiva,
Controller Algorithms and Tuning
 The previous sections of this module described the purpose of control, defined individual elements within control loops, and demonstrated the symbology used to represent those elements in an engineering
The previous sections of this module described the purpose of control, defined individual elements within control loops, and demonstrated the symbology used to represent those elements in an engineering
Review Paper on Comparison of various PID Controllers Tuning Methodologies for Heat Exchanger Model
 Review Paper on Comparison of various PID Controllers Tuning Methodologies for Heat Exchanger Model Sumit 1, Ms. Kajal 2 1 Student, Department of Electrical Engineering, R.N College of Engineering, Rohtak,
Review Paper on Comparison of various PID Controllers Tuning Methodologies for Heat Exchanger Model Sumit 1, Ms. Kajal 2 1 Student, Department of Electrical Engineering, R.N College of Engineering, Rohtak,
DC Motor Speed Control for a Plant Based On PID Controller
 DC Motor Speed Control for a Plant Based On PID Controller 1 Soniya Kocher, 2 Dr. A.K. Kori 1 PG Scholar, Electrical Department (High Voltage Engineering), JEC, Jabalpur, M.P., India 2 Assistant Professor,
DC Motor Speed Control for a Plant Based On PID Controller 1 Soniya Kocher, 2 Dr. A.K. Kori 1 PG Scholar, Electrical Department (High Voltage Engineering), JEC, Jabalpur, M.P., India 2 Assistant Professor,
An Implementation for Comparison of Various PID Controllers Tuning Methodologies for Heat Exchanger Model
 An Implementation for Comparison of Various PID Controllers Tuning Methodologies for Heat Exchanger Model Akshay Dhanda 1 and Dharam Niwas 2 1 M. Tech. Scholar, Indus Institute of Engineering and Technology,
An Implementation for Comparison of Various PID Controllers Tuning Methodologies for Heat Exchanger Model Akshay Dhanda 1 and Dharam Niwas 2 1 M. Tech. Scholar, Indus Institute of Engineering and Technology,
Keywords: Fuzzy Logic, Genetic Algorithm, Non-linear system, PI Controller.
 Volume 3, Issue 8, August 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Implementation
Volume 3, Issue 8, August 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Implementation
Think About Control Fundamentals Training. Terminology Control. Eko Harsono Control Fundamental - Con't
 Think About Control Fundamentals Training Terminology Control Eko Harsono eko.harsononus@gmail.com; 1 Contents Topics: Slide No: Advance Control Loop 3-10 Control Algorithm 11-25 Control System 26-32 Exercise
Think About Control Fundamentals Training Terminology Control Eko Harsono eko.harsononus@gmail.com; 1 Contents Topics: Slide No: Advance Control Loop 3-10 Control Algorithm 11-25 Control System 26-32 Exercise
Cohen-coon PID Tuning Method; A Better Option to Ziegler Nichols-PID Tuning Method
 Cohen-coon PID Tuning Method; A Better Option to Ziegler Nichols-PID Tuning Method Engr. Joseph, E. A. 1, Olaiya O. O. 2 1 Electrical Engineering Department, the Federal Polytechnic, Ilaro, Ogun State,
Cohen-coon PID Tuning Method; A Better Option to Ziegler Nichols-PID Tuning Method Engr. Joseph, E. A. 1, Olaiya O. O. 2 1 Electrical Engineering Department, the Federal Polytechnic, Ilaro, Ogun State,
Performance Analysis Of Various Anti-Reset Windup Algorithms For A Flow Process Station
 RESEARCH ARTICLE OPEN ACCESS Performance Analysis Of Various Anti-Reset Windup Algorithms For A Flow Process Station Shaunak Chakrabartty 1, Dr.I.Thirunavukkarasu 2 And Mukul Kumar Shahi 3 1 Department
RESEARCH ARTICLE OPEN ACCESS Performance Analysis Of Various Anti-Reset Windup Algorithms For A Flow Process Station Shaunak Chakrabartty 1, Dr.I.Thirunavukkarasu 2 And Mukul Kumar Shahi 3 1 Department
A M E M B E R O F T H E K E N D A L L G R O U P
 A M E M B E R O F T H E K E N D A L L G R O U P Basics of PID control in a Programmable Automation Controller Technology Summit September, 2018 Eric Paquette Definitions-PID A Proportional Integral Derivative
A M E M B E R O F T H E K E N D A L L G R O U P Basics of PID control in a Programmable Automation Controller Technology Summit September, 2018 Eric Paquette Definitions-PID A Proportional Integral Derivative
Instrumentation and Process Control. Process Control. Pressure, Flow, and Level. Courseware Sample F0
 Instrumentation and Process Control Process Control Pressure, Flow, and Level Courseware Sample 85982-F0 A INSTRUMENTATION AND PROCESS CONTROL PROCESS CONTROL Pressure, Flow, and Level Courseware Sample
Instrumentation and Process Control Process Control Pressure, Flow, and Level Courseware Sample 85982-F0 A INSTRUMENTATION AND PROCESS CONTROL PROCESS CONTROL Pressure, Flow, and Level Courseware Sample
Load Frequency and Voltage Control of Two Area Interconnected Power System using PID Controller. Kavita Goswami 1 and Lata Mishra 2
 e t International Journal on Emerging Technologies (Special Issue NCETST-2017) 8(1): 722-726(2017) (Published by Research Trend, Website: www.researchtrend.net) ISSN No. (Print) : 0975-8364 ISSN No. (Online)
e t International Journal on Emerging Technologies (Special Issue NCETST-2017) 8(1): 722-726(2017) (Published by Research Trend, Website: www.researchtrend.net) ISSN No. (Print) : 0975-8364 ISSN No. (Online)
Optimal Control System Design
 Chapter 6 Optimal Control System Design 6.1 INTRODUCTION The active AFO consists of sensor unit, control system and an actuator. While designing the control system for an AFO, a trade-off between the transient
Chapter 6 Optimal Control System Design 6.1 INTRODUCTION The active AFO consists of sensor unit, control system and an actuator. While designing the control system for an AFO, a trade-off between the transient
Fuzzy auto-tuning for a PID controller
 Fuzzy auto-tuning for a PID controller Alain Segundo Potts 1, Basilio Thomé de Freitas Jr 2. and José Carlos Amaro 2 1 Department of Telecommunication and Control. University of São Paulo. Brazil. e-mail:
Fuzzy auto-tuning for a PID controller Alain Segundo Potts 1, Basilio Thomé de Freitas Jr 2. and José Carlos Amaro 2 1 Department of Telecommunication and Control. University of São Paulo. Brazil. e-mail:
DC Motor Speed Control: A Case between PID Controller and Fuzzy Logic Controller
 DC Motor Speed Control: A Case between PID Controller and Fuzzy Logic Controller Philip A. Adewuyi Mechatronics Engineering Option, Department of Mechanical and Biomedical Engineering, Bells University
DC Motor Speed Control: A Case between PID Controller and Fuzzy Logic Controller Philip A. Adewuyi Mechatronics Engineering Option, Department of Mechanical and Biomedical Engineering, Bells University