A M E M B E R O F T H E K E N D A L L G R O U P
|
|
|
- Bethanie Bradley
- 5 years ago
- Views:
Transcription

1 A M E M B E R O F T H E K E N D A L L G R O U P
2 Basics of PID control in a Programmable Automation Controller Technology Summit September, 2018 Eric Paquette
3 Definitions-PID A Proportional Integral Derivative controller (PID controller) is a control loop feedback mechanism commonly used in industrial control systems. A PID controller continuously calculates an error value as the difference between a desired setpoint (SP) and a measured process variable (PV) and applies a correction to an output called the control variable (CV) based on proportional, integral, and derivative terms. These are denoted as P, I, and D which give their name to the controller type

4 PID Model Independent Gains Control Variable Process Variable

5 PID Model Dependent Gains
6 Response Curves A Underdamped B Overdamped C Oscillatory D Critically Damped Which one is correct?
7 Definitions- Proportional PROPORTIONAL TERM accounts for present values of the error. For example, if the error is large and positive, the control output will also be large and positive. A high PROPORTIONAL GAIN results in a large change in the output for a given change in the error. For instance, if the error term has a magnitude of 10, a proportional gain of 5 would produce a proportional response of 50. If the proportional gain is too high, the system can become unstable If the proportional gain is too small, this results in a small output response to a large input error, and a less responsive or less sensitive controller. Proportional Only controllers will operate with a steady state error
8 Effects of varying Kp
9 Definitions- Integral Integral Term The integral term addresses how long the measured variable has been away from the desired set point. The integral term integrates or continually sums up error over time. As a result, even a small error amount of persistent error calculated in the process will accumulate to a considerable amount over time
10 Definitions- Derivative DERIVATIVE TERM The derivative term considers how fast the error value changes at an instant in time. The derivative computation yields a rate of change or slope of the error curve. The derivative response is proportional to the rate of change of the process variable. Increasing the derivative time (T d ) parameter will cause the control system to react more strongly to changes in the error term and will increase the speed of the overall control system response. Most practical control systems use very small derivative time (T d ), because the Derivative Response is highly sensitive to noise in the process variable signal. If the sensor feedback signal is noisy or if the control loop rate is too slow, the derivative response can make the control system unstable
11 Periodic or Continuous Task? The PID should be used in a Periodic Task. In this case, the rung should be unconditional The period of the task should be matched with the loop update time of the PID. The period used is typically at least 10 times faster than the Process Time Constant If using a Continuous Task, the PID must be regulated with a Timer bit. Match the timer preset with the loop update time of the PID. If this is not done, then the calculations of the PID will be inconsistent. The scan time of the processor will affect the contributions of the integral and derivative terms.

12 Process Time Constant The Process Time Constant is equal to the time it takes for the process to change 63.2% of the total change in the measured variable. The smaller the time constant, the faster the process.

13 Process Deadtime Process Dead-Time is the time that passes from the moment the step change in the controller output is made until the moment when the measured variable shows a clear initial response to that change. Process Dead-Time arises because of transportation lag and/or sample or instrumentation lag. Transportation lag is defined as the time it takes for material to travel from one point to another. Similarly, sample or instrument lag is defined as the time it takes to collect, analyze or process a measured variable sample. The larger the Process Dead-Time relative to the Process Time Constant, the more difficult the associated process will be to control.
 The tag that holds the PV value A backing tag of type PID for internal storage Set these three fields to zero if you don t use them (cascade and bumpless restart of")
14 Adding the Ladder PID and Tags Enter the following for the ladder PID: A Tag for operator manual control if desired, or leave 0 if not used (used in operator manual control) The output tag that you ll use to drive the process (CV) The tag that holds the PV value A backing tag of type PID for internal storage Set these three fields to zero if you don t use them (cascade and bumpless restart of output module) These are display values from PID backing tag
 0 if not used If you change while the processor is running, you must uncheck")
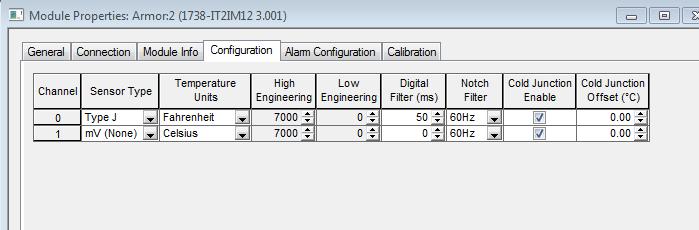
15 Configuring the PID - Scaling Tab Unscaled Min/Max: This should match the range from the input card Engineering units: This is what the setpoint is specified in and what the status below uses. The range the PID will use for its output This is the range the Tieback tag will use (used in operator manual control) 0 if not used If you change while the processor is running, you must uncheck this box once


16 Scaling, more important than you think

17 Configuring the PID - Alarms Tab The PID has built-in alarming. Can be used by the program to indicate that the PV is out of range. Is not essential for PID operation - does not have to be used. Specify alarm limit values if desired, or leave all 0 if you don t use.
18 Configuring the PID - Configuration Tab Choose Derivative of PV or Error Enter the desired Loop Update Time Choose the Control Action PV SP or SP-PV Cooling Heating Choose independent or dependent equation form. This affects tuning. Enter a range to limit the CV to. Enter 100 and 0 for no limit Enter Deadband value. Freezes CV when PV is close enough. Can save on valve wear or help stabilize system. Leave 0 if not used. Additional Options

19 Configuring the PID - Tuning Tab Use Set Output to directly control the output when software manual is checked. Setpoint is what the PID tries to drive the PV to. Manual mode feeds the Tieback tag directly to the PID output. Output bias, also known as feedforward, is directly added to the output. Enter the PID gains here. These numbers can be adjusted to tune the loop. Current values and status to monitor PID state.

20 Adding the Ladder PID - Timing The Ladder PID is not self-regulated (timed). Needs to be regulated with Timer or Periodic Task, otherwise, output will be wild. PID should only be executed as fast as process needs to conserve CPU resources. The period at which the PID is scanned true should be filled into the Loop Update Time. Programmer must make sure that this is filled in manually or update programmatically PID_Backing_Tag.UPD.

21 Adding a Function Block PIDE and Tags The Function Block PIDE Connect a tag for setpoint Connect process measurement tag Connect the process control tag Connect a tag for manual output control Set True for Program Control Set for the mode desired
22 Tuning your PID gains Many different methods Google it Typically done manually by changing the setpoint and observing the change in the process variable Can be done in closed or open loop
23 Typical Controls Engineer Method 1. Set Integral and Derivative gains to zero 2. Adjust the Proportional gain just until it starts to oscillate. 3. Cut Proportional gain in half 4. Start adding Integral gain until it looks good. Never use derivative, it just gets you in trouble
24 References Using the PIDE Instruction White Paper Logix5000 Controllers Advanced Process Control Reference Manual Logix5000 Controllers General Instructions Reference Manual Knowledgebase ID Knowledgebase ID Kendall ftp site: ftp:// /kcl/west MI (Grand Rapids, Holland & Muskegon)

25
26 Demo Let s Play!
Experiment 9. PID Controller
 Experiment 9 PID Controller Objective: - To be familiar with PID controller. - Noting how changing PID controller parameter effect on system response. Theory: The basic function of a controller is to execute
Experiment 9 PID Controller Objective: - To be familiar with PID controller. - Noting how changing PID controller parameter effect on system response. Theory: The basic function of a controller is to execute
Bulletin 1402 Line Synchronization Module (LSM)
") Bulletin 1402 (LSM) Application Notes Table of Contents What is Synchronization?...................................... 2 Synchronization............................................. 3 1771 Modules and
Bulletin 1402 (LSM) Application Notes Table of Contents What is Synchronization?...................................... 2 Synchronization............................................. 3 1771 Modules and
When you configure a PID loop in iocontrol, choose one of the following algorithms: Velocity ISA Parallel Interacting
 When you configure a PID loop in iocontrol, choose one of the following algorithms: Velocity ISA Parallel Interacting The ISA, Parallel and Interacting algorithms are functionally equivalent; the only
When you configure a PID loop in iocontrol, choose one of the following algorithms: Velocity ISA Parallel Interacting The ISA, Parallel and Interacting algorithms are functionally equivalent; the only
QuickBuilder PID Reference
 QuickBuilder PID Reference Doc. No. 951-530031-006 2010 Control Technology Corp. 25 South Street Hopkinton, MA 01748 Phone: 508.435.9595 Fax: 508.435.2373 Thursday, March 18, 2010 2 QuickBuilder PID Reference
QuickBuilder PID Reference Doc. No. 951-530031-006 2010 Control Technology Corp. 25 South Street Hopkinton, MA 01748 Phone: 508.435.9595 Fax: 508.435.2373 Thursday, March 18, 2010 2 QuickBuilder PID Reference
CHAPTER 11: DIGITAL CONTROL
 When I complete this chapter, I want to be able to do the following. Identify examples of analog and digital computation and signal transmission. Program a digital PID calculation Select a proper execution
When I complete this chapter, I want to be able to do the following. Identify examples of analog and digital computation and signal transmission. Program a digital PID calculation Select a proper execution
PROCESS DYNAMICS AND CONTROL
 Objectives of the Class PROCESS DYNAMICS AND CONTROL CHBE320, Spring 2018 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering What is process control? Basics of process control Basic hardware
Objectives of the Class PROCESS DYNAMICS AND CONTROL CHBE320, Spring 2018 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering What is process control? Basics of process control Basic hardware
PROCESS DYNAMICS AND CONTROL
 PROCESS DYNAMICS AND CONTROL CHBE306, Fall 2017 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering Korea University Korea University 1-1 Objectives of the Class What is process control?
PROCESS DYNAMICS AND CONTROL CHBE306, Fall 2017 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering Korea University Korea University 1-1 Objectives of the Class What is process control?
Process Control Laboratory Using Honeywell PlantScape
 Process Control Laboratory Using Honeywell PlantScape Christi Patton Luks, Laura P. Ford University of Tulsa Abstract The University of Tulsa has recently revised its process controls class from one 3-hour
Process Control Laboratory Using Honeywell PlantScape Christi Patton Luks, Laura P. Ford University of Tulsa Abstract The University of Tulsa has recently revised its process controls class from one 3-hour
Procidia Control Solutions Dead Time Compensation
 APPLICATION DATA Procidia Control Solutions Dead Time Compensation AD353-127 Rev 2 April 2012 This application data sheet describes dead time compensation methods. A configuration can be developed within
APPLICATION DATA Procidia Control Solutions Dead Time Compensation AD353-127 Rev 2 April 2012 This application data sheet describes dead time compensation methods. A configuration can be developed within
6.4 Adjusting PID Manually
 Setting Display Parameter Setting Display Operation Display > PARAMETER or PARA key for 3 seconds (to [MODE] Menu Display) > Right arrow key (to [PID] Menu Display ) > SET/ENTER key (The setting parameter
Setting Display Parameter Setting Display Operation Display > PARAMETER or PARA key for 3 seconds (to [MODE] Menu Display) > Right arrow key (to [PID] Menu Display ) > SET/ENTER key (The setting parameter
-binary sensors and actuators (such as an on/off controller) are generally more reliable and less expensive
 are generally more reliable and less expensive") Process controls are necessary for designing safe and productive plants. A variety of process controls are used to manipulate processes, however the most simple and often most effective is the PID controller.
Process controls are necessary for designing safe and productive plants. A variety of process controls are used to manipulate processes, however the most simple and often most effective is the PID controller.
International Journal of Research in Advent Technology Available Online at:
 OVERVIEW OF DIFFERENT APPROACHES OF PID CONTROLLER TUNING Manju Kurien 1, Alka Prayagkar 2, Vaishali Rajeshirke 3 1 IS Department 2 IE Department 3 EV DEpartment VES Polytechnic, Chembur,Mumbai 1 manjulibu@gmail.com
OVERVIEW OF DIFFERENT APPROACHES OF PID CONTROLLER TUNING Manju Kurien 1, Alka Prayagkar 2, Vaishali Rajeshirke 3 1 IS Department 2 IE Department 3 EV DEpartment VES Polytechnic, Chembur,Mumbai 1 manjulibu@gmail.com
Automationdirect.com. D i r e c t L o g i c L o o p P I D C o p r o c e s s o r F P I D
 Automationdirect.com D i r e c t L o g i c 4 0 5 1 6 L o o p P I D C o p r o c e s s o r F 4-1 6 P I D Order Number: F4-16PID-M TRADEMARKS Automationdirect.com is a Trademark of Automationdirect.com CoProcessor
Automationdirect.com D i r e c t L o g i c 4 0 5 1 6 L o o p P I D C o p r o c e s s o r F 4-1 6 P I D Order Number: F4-16PID-M TRADEMARKS Automationdirect.com is a Trademark of Automationdirect.com CoProcessor
Compensation of Dead Time in PID Controllers
 2006-12-06 Page 1 of 25 Compensation of Dead Time in PID Controllers Advanced Application Note 2006-12-06 Page 2 of 25 Table of Contents: 1 OVERVIEW...3 2 RECOMMENDATIONS...6 3 CONFIGURATION...7 4 TEST
2006-12-06 Page 1 of 25 Compensation of Dead Time in PID Controllers Advanced Application Note 2006-12-06 Page 2 of 25 Table of Contents: 1 OVERVIEW...3 2 RECOMMENDATIONS...6 3 CONFIGURATION...7 4 TEST
CHAPTER 4 PID CONTROLLER BASED SPEED CONTROL OF THREE PHASE INDUCTION MOTOR
 36 CHAPTER 4 PID CONTROLLER BASED SPEED CONTROL OF THREE PHASE INDUCTION MOTOR 4.1 INTRODUCTION Now a day, a number of different controllers are used in the industry and in many other fields. In a quite
36 CHAPTER 4 PID CONTROLLER BASED SPEED CONTROL OF THREE PHASE INDUCTION MOTOR 4.1 INTRODUCTION Now a day, a number of different controllers are used in the industry and in many other fields. In a quite
SxWEB PID algorithm experimental tuning
 SxWEB PID algorithm experimental tuning rev. 0.3, 13 July 2017 Index 1. PID ALGORITHM SX2WEB24 SYSTEM... 2 2. PID EXPERIMENTAL TUNING IN THE SX2WEB24... 3 2.1 OPEN LOOP TUNING PROCEDURE... 3 2.1.1 How
SxWEB PID algorithm experimental tuning rev. 0.3, 13 July 2017 Index 1. PID ALGORITHM SX2WEB24 SYSTEM... 2 2. PID EXPERIMENTAL TUNING IN THE SX2WEB24... 3 2.1 OPEN LOOP TUNING PROCEDURE... 3 2.1.1 How
Introduction To Temperature Controllers
 Introduction To Temperature Controllers The Miniature CN77000 is a full featured microprocessor-based controller in a 1/16 DIN package. How Can I Control My Process Temperature Accurately and Reliably?
Introduction To Temperature Controllers The Miniature CN77000 is a full featured microprocessor-based controller in a 1/16 DIN package. How Can I Control My Process Temperature Accurately and Reliably?
Different Controller Terms
 Loop Tuning Lab Challenges Not all PID controllers are the same. They don t all use the same units for P-I-and D. There are different types of processes. There are different final element types. There
Loop Tuning Lab Challenges Not all PID controllers are the same. They don t all use the same units for P-I-and D. There are different types of processes. There are different final element types. There
PLC Water Pump Control
 The University of Akron IdeaExchange@UAkron Honors Research Projects The Dr. Gary B. and Pamela S. Williams Honors College Spring 2016 PLC Water Pump Control Kevin Logsdon kal62@zips.uakron.edu Please
The University of Akron IdeaExchange@UAkron Honors Research Projects The Dr. Gary B. and Pamela S. Williams Honors College Spring 2016 PLC Water Pump Control Kevin Logsdon kal62@zips.uakron.edu Please
CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING. Professor Dae Ryook Yang
 CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 11-1 Road Map of the Lecture XI Controller Design and PID
CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 11-1 Road Map of the Lecture XI Controller Design and PID
Think About Control Fundamentals Training. Terminology Control. Eko Harsono Control Fundamental - Con't
 Think About Control Fundamentals Training Terminology Control Eko Harsono eko.harsononus@gmail.com; 1 Contents Topics: Slide No: Advance Control Loop 3-10 Control Algorithm 11-25 Control System 26-32 Exercise
Think About Control Fundamentals Training Terminology Control Eko Harsono eko.harsononus@gmail.com; 1 Contents Topics: Slide No: Advance Control Loop 3-10 Control Algorithm 11-25 Control System 26-32 Exercise
Process controls in food processing
 Process controls in food processing Module- 9 Lec- 9 Dr. Shishir Sinha Dept. of Chemical Engineering IIT Roorkee A well designed process ought to be easy to control. More importantly, it is best to consider
Process controls in food processing Module- 9 Lec- 9 Dr. Shishir Sinha Dept. of Chemical Engineering IIT Roorkee A well designed process ought to be easy to control. More importantly, it is best to consider
[ á{tå TÄàt. Chapter Four. Time Domain Analysis of control system
 Chapter Four Time Domain Analysis of control system The time response of a control system consists of two parts: the transient response and the steady-state response. By transient response, we mean that
Chapter Four Time Domain Analysis of control system The time response of a control system consists of two parts: the transient response and the steady-state response. By transient response, we mean that
Controller Algorithms and Tuning
 The previous sections of this module described the purpose of control, defined individual elements within control loops, and demonstrated the symbology used to represent those elements in an engineering
The previous sections of this module described the purpose of control, defined individual elements within control loops, and demonstrated the symbology used to represent those elements in an engineering
Chapter 4 PID Design Example
 Chapter 4 PID Design Example I illustrate the principles of feedback control with an example. We start with an intrinsic process P(s) = ( )( ) a b ab = s + a s + b (s + a)(s + b). This process cascades
Chapter 4 PID Design Example I illustrate the principles of feedback control with an example. We start with an intrinsic process P(s) = ( )( ) a b ab = s + a s + b (s + a)(s + b). This process cascades
EE 308 Spring Preparation for Final Lab Project Simple Motor Control. Motor Control
 Preparation for Final Lab Project Simple Motor Control Motor Control A proportional integral derivative controller (PID controller) is a generic control loop feedback mechanism (controller) widely used
Preparation for Final Lab Project Simple Motor Control Motor Control A proportional integral derivative controller (PID controller) is a generic control loop feedback mechanism (controller) widely used
(1) Identify individual entries in a Control Loop Diagram. (2) Sketch Bode Plots by hand (when we could have used a computer
 Identify individual entries in a Control Loop Diagram. (2) Sketch Bode Plots by hand (when we could have used a computer") Last day: (1) Identify individual entries in a Control Loop Diagram (2) Sketch Bode Plots by hand (when we could have used a computer program to generate sketches). How might this be useful? Can more clearly
Last day: (1) Identify individual entries in a Control Loop Diagram (2) Sketch Bode Plots by hand (when we could have used a computer program to generate sketches). How might this be useful? Can more clearly
InstrumentationTools.com
 Author: Instrumentation Tools Categories: Control Systems Ziegler-Nichols Closed-Loop Method (Ultimate Gain) Closed-loop refers to the operation of a control system with the controlling device in automatic
Author: Instrumentation Tools Categories: Control Systems Ziegler-Nichols Closed-Loop Method (Ultimate Gain) Closed-loop refers to the operation of a control system with the controlling device in automatic
PID Control Technical Notes
 PID Control Technical Notes General PID (Proportional-Integral-Derivative) control action allows the process control to accurately maintain setpoint by adjusting the control outputs. In this technical
PID Control Technical Notes General PID (Proportional-Integral-Derivative) control action allows the process control to accurately maintain setpoint by adjusting the control outputs. In this technical
The Discussion of this exercise covers the following points: Angular position control block diagram and fundamentals. Power amplifier 0.
 Exercise 6 Motor Shaft Angular Position Control EXERCISE OBJECTIVE When you have completed this exercise, you will be able to associate the pulses generated by a position sensing incremental encoder with
Exercise 6 Motor Shaft Angular Position Control EXERCISE OBJECTIVE When you have completed this exercise, you will be able to associate the pulses generated by a position sensing incremental encoder with
Application Note. Renu Electronics Private Limited. PID Instruction In IEC. Page 1
 Application Note PID Instruction In IEC This document explains about PID Instruction in IEC. This application note is applicable for FP and FL products (IEC Supported). www.renuelectronics.com Page 1 Contents
Application Note PID Instruction In IEC This document explains about PID Instruction in IEC. This application note is applicable for FP and FL products (IEC Supported). www.renuelectronics.com Page 1 Contents
PID-CONTROL FUNCTION AND APPLICATION
 PID-CONTROL FUNCTION AND APPLICATION Hitachi Inverters SJ1 and L1 Series Deviation - P : Proportional operation I : Integral operation D : Differential operation Inverter Frequency command Fan, pump, etc.
PID-CONTROL FUNCTION AND APPLICATION Hitachi Inverters SJ1 and L1 Series Deviation - P : Proportional operation I : Integral operation D : Differential operation Inverter Frequency command Fan, pump, etc.
PID Tuning Guide. For the Allen-Bradley Family of PLCs. A Best-Practices Approach to Understanding and Tuning PID Controllers
 PID Tuning Guide For the Allen-Bradley Family of PLCs A Best-Practices Approach to Understanding and Tuning PID Controllers First Edition by Robert C. Rice, PhD Table of Contents 2 Forward 3 The PID Controller
PID Tuning Guide For the Allen-Bradley Family of PLCs A Best-Practices Approach to Understanding and Tuning PID Controllers First Edition by Robert C. Rice, PhD Table of Contents 2 Forward 3 The PID Controller
Linear Control Systems Lectures #5 - PID Controller. Guillaume Drion Academic year
 Linear Control Systems Lectures #5 - PID Controller Guillaume Drion Academic year 2018-2019 1 Outline PID controller: general form Effects of the proportional, integral and derivative actions PID tuning
Linear Control Systems Lectures #5 - PID Controller Guillaume Drion Academic year 2018-2019 1 Outline PID controller: general form Effects of the proportional, integral and derivative actions PID tuning
Control and Optimization
 Control and Optimization Example Design Goals Prevent overheating Meet deadlines Save energy Design Goals Prevent overheating Meet deadlines Save energy Question: what the safety, mission, and performance
Control and Optimization Example Design Goals Prevent overheating Meet deadlines Save energy Design Goals Prevent overheating Meet deadlines Save energy Question: what the safety, mission, and performance
Feedback Systems in HVAC ASHRAE Distinguished Lecture Series Jim Coogan Siemens Building Technologies
 Feedback Systems in HVAC ASHRAE Distinguished Lecture Series Jim Coogan Siemens Building Technologies ASHRAE, Madison Chapter October, 2014 Agenda Definitions: feedback and closed-loop control Types of
Feedback Systems in HVAC ASHRAE Distinguished Lecture Series Jim Coogan Siemens Building Technologies ASHRAE, Madison Chapter October, 2014 Agenda Definitions: feedback and closed-loop control Types of
Find, read or write documentation which describes work of the control loop: Process Control Philosophy. Where the next information can be found:
 1 Controller uning o implement continuous control we should assemble a control loop which consists of the process/object, controller, sensors and actuators. Information about the control loop Find, read
1 Controller uning o implement continuous control we should assemble a control loop which consists of the process/object, controller, sensors and actuators. Information about the control loop Find, read
1. Consider the closed loop system shown in the figure below. Select the appropriate option to implement the system shown in dotted lines using
 1. Consider the closed loop system shown in the figure below. Select the appropriate option to implement the system shown in dotted lines using op-amps a. b. c. d. Solution: b) Explanation: The dotted
1. Consider the closed loop system shown in the figure below. Select the appropriate option to implement the system shown in dotted lines using op-amps a. b. c. d. Solution: b) Explanation: The dotted
TelePACE PID Controllers
 TelePACE PID Controllers User and Reference Manual CONTROL MICROSYSTEMS SCADA products... for the distance 28 Steacie Drive Telephone: 613-591-1943 Kanata, Ontario Facsimile: 613-591-1022 K2K 2A9 Technical
TelePACE PID Controllers User and Reference Manual CONTROL MICROSYSTEMS SCADA products... for the distance 28 Steacie Drive Telephone: 613-591-1943 Kanata, Ontario Facsimile: 613-591-1022 K2K 2A9 Technical
GLOSSARY OF TERMS FOR PROCESS CONTROL
 Y1900SS-1a 1 GLOSSARY OF TERMS FOR PROCESS CONTROL Accuracy Conformity of an indicated value to an accepted standard value, or true value. Accuracy, Reference A number or quantity which defines the limit
Y1900SS-1a 1 GLOSSARY OF TERMS FOR PROCESS CONTROL Accuracy Conformity of an indicated value to an accepted standard value, or true value. Accuracy, Reference A number or quantity which defines the limit
Automatic Controller Dynamic Specification (Summary of Version 1.0, 11/93)
") The contents of this document are copyright EnTech Control Engineering Inc., and may not be reproduced or retransmitted in any form without the express consent of EnTech Control Engineering Inc. Automatic
The contents of this document are copyright EnTech Control Engineering Inc., and may not be reproduced or retransmitted in any form without the express consent of EnTech Control Engineering Inc. Automatic
2. Basic Control Concepts
 2. Basic Concepts 2.1 Signals and systems 2.2 Block diagrams 2.3 From flow sheet to block diagram 2.4 strategies 2.4.1 Open-loop control 2.4.2 Feedforward control 2.4.3 Feedback control 2.5 Feedback control
2. Basic Concepts 2.1 Signals and systems 2.2 Block diagrams 2.3 From flow sheet to block diagram 2.4 strategies 2.4.1 Open-loop control 2.4.2 Feedforward control 2.4.3 Feedback control 2.5 Feedback control
Embedded Control Project -Iterative learning control for
 Embedded Control Project -Iterative learning control for Author : Axel Andersson Hariprasad Govindharajan Shahrzad Khodayari Project Guide : Alexander Medvedev Program : Embedded Systems and Engineering
Embedded Control Project -Iterative learning control for Author : Axel Andersson Hariprasad Govindharajan Shahrzad Khodayari Project Guide : Alexander Medvedev Program : Embedded Systems and Engineering
PID. What is PID and how does it work? Auto tuning PID with the 5400 Controller. Visit our website at:
 PID What is PID and how does it work? Auto tuning PID with the 5400 Controller What is PID? PID control (pronounced P-eye-Dee) stands for Proportional-Integral-Derivative, and is a mathematical method
PID What is PID and how does it work? Auto tuning PID with the 5400 Controller What is PID? PID control (pronounced P-eye-Dee) stands for Proportional-Integral-Derivative, and is a mathematical method
Loop Design. Chapter Introduction
 Chapter 8 Loop Design 8.1 Introduction This is the first Chapter that deals with design and we will therefore start by some general aspects on design of engineering systems. Design is complicated because
Chapter 8 Loop Design 8.1 Introduction This is the first Chapter that deals with design and we will therefore start by some general aspects on design of engineering systems. Design is complicated because
Stiction Compensation
 University of Alberta Computer Process Control Group Stiction Compensation CPC Group, University of Alberta Table of Contents Introduction 1 System Requirements 1 Quick Start 1 Detailed Instructions 3
University of Alberta Computer Process Control Group Stiction Compensation CPC Group, University of Alberta Table of Contents Introduction 1 System Requirements 1 Quick Start 1 Detailed Instructions 3
Equipment and materials from stockroom:! DC Permanent-magnet Motor (If you can, get the same motor you used last time.)! Dual Power Amp!
! Dual Power Amp!") University of Utah Electrical & Computer Engineering Department ECE 3510 Lab 5b Position Control Using a Proportional - Integral - Differential (PID) Controller Note: Bring the lab-2 handout to use as
University of Utah Electrical & Computer Engineering Department ECE 3510 Lab 5b Position Control Using a Proportional - Integral - Differential (PID) Controller Note: Bring the lab-2 handout to use as
Closed-Loop Position Control, Proportional Mode
 Exercise 4 Closed-Loop Position Control, Proportional Mode EXERCISE OBJECTIVE To describe the proportional control mode; To describe the advantages and disadvantages of proportional control; To define
Exercise 4 Closed-Loop Position Control, Proportional Mode EXERCISE OBJECTIVE To describe the proportional control mode; To describe the advantages and disadvantages of proportional control; To define
NZQA unit standard version 2 Page 1 of 5. Demonstrate and apply intermediate knowledge of instrumentation and control system engineering
 Page 1 of 5 Title Demonstrate and apply intermediate knowledge of instrumentation and control system engineering Level 5 Credits 15 Purpose This unit standard covers intermediate knowledge of the concepts
Page 1 of 5 Title Demonstrate and apply intermediate knowledge of instrumentation and control system engineering Level 5 Credits 15 Purpose This unit standard covers intermediate knowledge of the concepts
Class 5. Competency Exam Round 1. The Process Designer s Process. Process Control Preliminaries. On/Off Control The Simplest Controller
 Class 5 Competency Exam Round 1 Proportional Control Starts Friday, September 17 Ends Friday, October 1 Process Control Preliminaries The final control element, process and sensor/transmitter all have
Class 5 Competency Exam Round 1 Proportional Control Starts Friday, September 17 Ends Friday, October 1 Process Control Preliminaries The final control element, process and sensor/transmitter all have
PL420 PROGRAMMABLE LOGIC CONTROLLER
 PL420 PROGRAMMABLE LOGIC CONTROLLER USER MANUAL 12/01/2007 V02 P.O.Box 24 STANFIELD 3613 SOUTH AFRICA Tel: +27 (031) 7028033 Fax: +27 (031) 7028041 Email: proconel@proconel.com Web: www.proconel.com TABLE
PL420 PROGRAMMABLE LOGIC CONTROLLER USER MANUAL 12/01/2007 V02 P.O.Box 24 STANFIELD 3613 SOUTH AFRICA Tel: +27 (031) 7028033 Fax: +27 (031) 7028041 Email: proconel@proconel.com Web: www.proconel.com TABLE
Control Architectures: Feed Forward, Feedback, Ratio, and Cascade By Peter Woolf University of Michigan
 Control Architectures: Feed Forward, Feedback, Ratio, and Cascade By Peter Woolf (pwoolf@umich.edu) University of Michigan Michigan Chemical Process Dynamics and Controls Open Textbook version 1.0 Creative
Control Architectures: Feed Forward, Feedback, Ratio, and Cascade By Peter Woolf (pwoolf@umich.edu) University of Michigan Michigan Chemical Process Dynamics and Controls Open Textbook version 1.0 Creative
AVR221: Discrete PID Controller on tinyavr and megaavr devices. Introduction. AVR 8-bit Microcontrollers APPLICATION NOTE
 AVR 8-bit Microcontrollers AVR221: Discrete PID Controller on tinyavr and megaavr devices APPLICATION NOTE Introduction This application note describes a simple implementation of a discrete Proportional-
AVR 8-bit Microcontrollers AVR221: Discrete PID Controller on tinyavr and megaavr devices APPLICATION NOTE Introduction This application note describes a simple implementation of a discrete Proportional-
VI. SET-UP PARAMETER. Input filter
 VI. SET-UP PARAMETER Input filter Input filter When a PV value becomes unstable due to effects of noise, the filter helps suppress the unstable status. (input filter constant) Set the filter time constant
VI. SET-UP PARAMETER Input filter Input filter When a PV value becomes unstable due to effects of noise, the filter helps suppress the unstable status. (input filter constant) Set the filter time constant
Draw the symbol and state the applications of : 1) Push button switch 2) 3) Solenoid valve 4) Limit switch ( 1m each) Ans: 1) Push Button
 Push button switch 2) 3) Solenoid valve 4) Limit switch ( 1m each) Ans: 1) Push Button") Subject Code: 17641Model AnswerPage 1 of 16 Important suggestions to examiners: 1) The answers should be examined by key words and not as word-to-word as given in the model answer scheme. 2) The model
Subject Code: 17641Model AnswerPage 1 of 16 Important suggestions to examiners: 1) The answers should be examined by key words and not as word-to-word as given in the model answer scheme. 2) The model
F. Greg Shinskey. "PID Control." Copyright 2000 CRC Press LLC. <
 F. Greg Shinskey. "PID Control." Copyright 2000 CRC Press LLC. . PID Control F. Greg Shinskey Process Control Consultant 97.1 Introduction 97.2 Open and Closed Loops Open-Loop
F. Greg Shinskey. "PID Control." Copyright 2000 CRC Press LLC. . PID Control F. Greg Shinskey Process Control Consultant 97.1 Introduction 97.2 Open and Closed Loops Open-Loop
Advanced Servo Tuning
 Advanced Servo Tuning Dr. Rohan Munasinghe Department of Electronic and Telecommunication Engineering University of Moratuwa Servo System Elements position encoder Motion controller (software) Desired
Advanced Servo Tuning Dr. Rohan Munasinghe Department of Electronic and Telecommunication Engineering University of Moratuwa Servo System Elements position encoder Motion controller (software) Desired
PID Tuning Case Study Tuning Level controller using a priori knowledge 1
 1 1. Introduction Tuning level controllers can be a challenging task. When you have identified a proper ramp model, this this task becomes much easier when using Aptitune. Identifying a good ramp model
1 1. Introduction Tuning level controllers can be a challenging task. When you have identified a proper ramp model, this this task becomes much easier when using Aptitune. Identifying a good ramp model
Model 392. Continuous-trace circular-chart recorder. Controller and Setpoint Generator Manual EUROT H ERM
 Model 392 Continuous-trace circular-chart recorder EUROT H ERM Controller and Setpoint Generator Manual CONTROLLER AND SETPOINT GENERATOR MANUAL LIST OF CONTENTS Section Page 1 INTRODUCTION... 3 2 INSTALLATION...
Model 392 Continuous-trace circular-chart recorder EUROT H ERM Controller and Setpoint Generator Manual CONTROLLER AND SETPOINT GENERATOR MANUAL LIST OF CONTENTS Section Page 1 INTRODUCTION... 3 2 INSTALLATION...
Application sheet for Green 300 series controllers. Title. Purpose. Application Controller Loop Configuration: Wiring: Explanation :
 Furnace temperature control with Solid State Relay(SSR) AP35001 Control a furnace temperature by using UT350 temperature controller. Model UT350 can drive SSR as an actuator directly. Electrical Furnace
Furnace temperature control with Solid State Relay(SSR) AP35001 Control a furnace temperature by using UT350 temperature controller. Model UT350 can drive SSR as an actuator directly. Electrical Furnace
The PID controller. Summary. Introduction to Control Systems
 The PID controller ISTTOK real-time AC 7-10-2010 Summary Introduction to Control Systems PID Controller PID Tuning Discrete-time Implementation The PID controller 2 Introduction to Control Systems Some
The PID controller ISTTOK real-time AC 7-10-2010 Summary Introduction to Control Systems PID Controller PID Tuning Discrete-time Implementation The PID controller 2 Introduction to Control Systems Some
Logic Developer Process Edition Function Blocks
 GE Intelligent Platforms Logic Developer Process Edition Function Blocks Delivering increased precision and enabling advanced regulatory control strategies for continuous process control Logic Developer
GE Intelligent Platforms Logic Developer Process Edition Function Blocks Delivering increased precision and enabling advanced regulatory control strategies for continuous process control Logic Developer
Chapter 5. Tracking system with MEMS mirror
 Chapter 5 Tracking system with MEMS mirror Up to now, this project has dealt with the theoretical optimization of the tracking servo with MEMS mirror through the use of simulation models. For these models
Chapter 5 Tracking system with MEMS mirror Up to now, this project has dealt with the theoretical optimization of the tracking servo with MEMS mirror through the use of simulation models. For these models
USER MANUAL. EPP Intelligent Positioner Control Unit 1/22.
 USER MANUAL - Intelligent Positioner Control Unit 1/22 Table of contents: 1 General... 3 1.1 Safety instructions... 3 2 Application... 4 3 Electrical specifications and terminals... 5 3.1 Control loop...
USER MANUAL - Intelligent Positioner Control Unit 1/22 Table of contents: 1 General... 3 1.1 Safety instructions... 3 2 Application... 4 3 Electrical specifications and terminals... 5 3.1 Control loop...
Getting the Best Performance from Challenging Control Loops
 Getting the Best Performance from Challenging Control Loops Jacques F. Smuts - OptiControls Inc, League City, Texas; jsmuts@opticontrols.com KEYWORDS PID Controls, Oscillations, Disturbances, Tuning, Stiction,
Getting the Best Performance from Challenging Control Loops Jacques F. Smuts - OptiControls Inc, League City, Texas; jsmuts@opticontrols.com KEYWORDS PID Controls, Oscillations, Disturbances, Tuning, Stiction,
ONLINE OSCILLATION DETECTION AND ADAPTIVE CONTROL IN CHEMICAL PLANTS
 ONLINE OSCILLATION DETECTION AND ADAPTIVE CONTROL IN CHEMICAL PLANTS PiControl Solutions Company www.picontrolsolutions.com info@picontrolsolutions.com Introduction Fast and reliable detection of critical
ONLINE OSCILLATION DETECTION AND ADAPTIVE CONTROL IN CHEMICAL PLANTS PiControl Solutions Company www.picontrolsolutions.com info@picontrolsolutions.com Introduction Fast and reliable detection of critical
Basic Tuning for the SERVOSTAR 400/600
 Basic Tuning for the SERVOSTAR 400/600 Welcome to Kollmorgen s interactive tuning chart. The first three sheets of this document provide a flow chart to describe tuning the servo gains of a SERVOSTAR 400/600.
Basic Tuning for the SERVOSTAR 400/600 Welcome to Kollmorgen s interactive tuning chart. The first three sheets of this document provide a flow chart to describe tuning the servo gains of a SERVOSTAR 400/600.
LNG Level Control. LNG Level Control. DeltaV Whitepaper. March 2007 Page 1
 March 2007 Page 1 This whitepaper highlights the use of the Entech Toolkit by Emerson s Control Performance specialists to improve level control performance www.emersonprocess.com/deltav March 2007 Page
March 2007 Page 1 This whitepaper highlights the use of the Entech Toolkit by Emerson s Control Performance specialists to improve level control performance www.emersonprocess.com/deltav March 2007 Page
Introduction to Servo Control & PID Tuning
 Introduction to Servo Control & PID Tuning Presented to: Agenda Introduction to Servo Control Theory PID Algorithm Overview Tuning & General System Characterization Oscillation Characterization Feed-forward
Introduction to Servo Control & PID Tuning Presented to: Agenda Introduction to Servo Control Theory PID Algorithm Overview Tuning & General System Characterization Oscillation Characterization Feed-forward
The MFT B-Series Flow Controller.
 The MFT B-Series Flow Controller. There are many options available to control a process flow ranging from electronic, mechanical to pneumatic. In the industrial market there are PLCs, PCs, valves and flow
The MFT B-Series Flow Controller. There are many options available to control a process flow ranging from electronic, mechanical to pneumatic. In the industrial market there are PLCs, PCs, valves and flow
Appendix F: PID Control...F 1 PID Control...F 2
 Appendix PID Control F Table of Contents Appendix F: PID Control........................................F 1 PID Control................................................F 2 PID Control Overview.............................................
Appendix PID Control F Table of Contents Appendix F: PID Control........................................F 1 PID Control................................................F 2 PID Control Overview.............................................
TEMPERATURE PROCESS CONTROL MANUAL. Penn State Chemical Engineering
 TEMPERATURE PROCESS CONTROL MANUAL Penn State Chemical Engineering Revised Summer 2015 Contents LEARNING OBJECTIVES... 3 EXPERIMENTAL OBJECTIVES AND OVERVIEW... 3 Pre-lab study:... 3 Experiments in the
TEMPERATURE PROCESS CONTROL MANUAL Penn State Chemical Engineering Revised Summer 2015 Contents LEARNING OBJECTIVES... 3 EXPERIMENTAL OBJECTIVES AND OVERVIEW... 3 Pre-lab study:... 3 Experiments in the
Closed-Loop Speed Control, Proportional-Plus-Integral-Plus-Derivative Mode
 Exercise 7 Closed-Loop Speed Control, EXERCISE OBJECTIVE To describe the derivative control mode; To describe the advantages and disadvantages of derivative control; To describe the proportional-plus-integral-plus-derivative
Exercise 7 Closed-Loop Speed Control, EXERCISE OBJECTIVE To describe the derivative control mode; To describe the advantages and disadvantages of derivative control; To describe the proportional-plus-integral-plus-derivative
Chapter 10 Digital PID
 Chapter 10 Digital PID Chapter 10 Digital PID control Goals To show how PID control can be implemented in a digital computer program To deliver a template for a PID controller that you can implement yourself
Chapter 10 Digital PID Chapter 10 Digital PID control Goals To show how PID control can be implemented in a digital computer program To deliver a template for a PID controller that you can implement yourself
Conic Systems Inc. INSTRUCTION MANUAL FOR DATATRAN C2844 PID CONTROLLER WITH FEED FORWARD COMPENSATION
 Conic Systems Inc. INSTRUCTION MANUAL FOR DATATRAN C2844 PID CONTROLLER WITH FEED FORWARD COMPENSATION FOR TECHNICAL OR SALES ASSISTANCE CONTACT CONIC SYSTEMS INC. AT TEL: 845.856.4053 OR FAX: 845.858.2824
Conic Systems Inc. INSTRUCTION MANUAL FOR DATATRAN C2844 PID CONTROLLER WITH FEED FORWARD COMPENSATION FOR TECHNICAL OR SALES ASSISTANCE CONTACT CONIC SYSTEMS INC. AT TEL: 845.856.4053 OR FAX: 845.858.2824
EE 42/100: Lecture 8. 1 st -Order RC Transient Example, Introduction to 2 nd -Order Transients. EE 42/100 Summer 2012, UC Berkeley T.
 EE 42/100: Lecture 8 1 st -Order RC Transient Example, Introduction to 2 nd -Order Transients Circuits with non-dc Sources Recall that the solution to our ODEs is Particular solution is constant for DC
EE 42/100: Lecture 8 1 st -Order RC Transient Example, Introduction to 2 nd -Order Transients Circuits with non-dc Sources Recall that the solution to our ODEs is Particular solution is constant for DC
Internal Model Control of Overheating Temperature Based on OVATION System
 Internal Model Control of Overheating Temperature Based on OVATION System Xingming Xu North China Electric Power University Automation Department, Baoding, China 15231252219@163.com Abstract In the thermal
Internal Model Control of Overheating Temperature Based on OVATION System Xingming Xu North China Electric Power University Automation Department, Baoding, China 15231252219@163.com Abstract In the thermal
Simulation of process identification and controller tuning for flow control system
 IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Simulation of process identification and controller tuning for flow control system To cite this article: I M Chew et al 2017 IOP
IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Simulation of process identification and controller tuning for flow control system To cite this article: I M Chew et al 2017 IOP
I/A Series Software. Extended Proportional-Integral-Derivative (PIDX) Controller PSS 21S-3F3 B4 OVERVIEW PRODUCT SPECIFICATIONS
 Controller PSS 21S-3F3 B4 OVERVIEW PRODUCT SPECIFICATIONS") PRODUCT SPECIFICATIONS I/A Series Software PSS 21S-3F3 B4 Extended Proportional-Integral-Derivative (PIDX) Controller The Extended Proportional-Integral-Derivative (PIDX) block adds batch control, a sample-data
PRODUCT SPECIFICATIONS I/A Series Software PSS 21S-3F3 B4 Extended Proportional-Integral-Derivative (PIDX) Controller The Extended Proportional-Integral-Derivative (PIDX) block adds batch control, a sample-data
Module 08 Controller Designs: Compensators and PIDs
 Module 08 Controller Designs: Compensators and PIDs Ahmad F. Taha EE 3413: Analysis and Desgin of Control Systems Email: ahmad.taha@utsa.edu Webpage: http://engineering.utsa.edu/ taha March 31, 2016 Ahmad
Module 08 Controller Designs: Compensators and PIDs Ahmad F. Taha EE 3413: Analysis and Desgin of Control Systems Email: ahmad.taha@utsa.edu Webpage: http://engineering.utsa.edu/ taha March 31, 2016 Ahmad
CDS 101/110: Lecture 8.2 PID Control
 CDS 11/11: Lecture 8.2 PID Control November 16, 216 Goals: Nyquist Example Introduce and review PID control. Show how to use loop shaping using PID to achieve a performance specification Discuss the use
CDS 11/11: Lecture 8.2 PID Control November 16, 216 Goals: Nyquist Example Introduce and review PID control. Show how to use loop shaping using PID to achieve a performance specification Discuss the use
MM7 Practical Issues Using PID Controllers
 MM7 Practical Issues Using PID Controllers Readings: FC textbook: Section 4.2.7 Integrator Antiwindup p.196-200 Extra reading: Hou Ming s lecture notes p.60-69 Extra reading: M.J. Willis notes on PID controler
MM7 Practical Issues Using PID Controllers Readings: FC textbook: Section 4.2.7 Integrator Antiwindup p.196-200 Extra reading: Hou Ming s lecture notes p.60-69 Extra reading: M.J. Willis notes on PID controler
Mercury technical manual
 v.1 Mercury technical manual September 2017 1 Mercury technical manual v.1 Mercury technical manual 1. Introduction 2. Connection details 2.1 Pin assignments 2.2 Connecting multiple units 2.3 Mercury Link
v.1 Mercury technical manual September 2017 1 Mercury technical manual v.1 Mercury technical manual 1. Introduction 2. Connection details 2.1 Pin assignments 2.2 Connecting multiple units 2.3 Mercury Link
CONVENIENT INSTRUCTION OF PID TEMPERATURE CONTROL. Control warning
 Execution control Heating/Cooling Operand EN H/C Range Ladder symbol 86. Md : ERR Parameter error Yn : ALM Temperature Sn : Control warning Zn : Sv : Os : PR : IR : DR : OR : WR : Y HR ROR DR K Y0 Y255
Execution control Heating/Cooling Operand EN H/C Range Ladder symbol 86. Md : ERR Parameter error Yn : ALM Temperature Sn : Control warning Zn : Sv : Os : PR : IR : DR : OR : WR : Y HR ROR DR K Y0 Y255
Understanding PID Control
 1 of 5 2/20/01 1:15 PM Understanding PID Control Familiar examples show how and why proportional-integral-derivative controllers behave the way they do. Keywords: Process control Control theory Controllers
1 of 5 2/20/01 1:15 PM Understanding PID Control Familiar examples show how and why proportional-integral-derivative controllers behave the way they do. Keywords: Process control Control theory Controllers
Fundamentals of Servo Motion Control
 Fundamentals of Servo Motion Control The fundamental concepts of servo motion control have not changed significantly in the last 50 years. The basic reasons for using servo systems in contrast to open
Fundamentals of Servo Motion Control The fundamental concepts of servo motion control have not changed significantly in the last 50 years. The basic reasons for using servo systems in contrast to open
PID control. since Similarly, modern industrial
 Control basics Introduction to For deeper understanding of their usefulness, we deconstruct P, I, and D control functions. PID control Paul Avery Senior Product Training Engineer Yaskawa Electric America,
Control basics Introduction to For deeper understanding of their usefulness, we deconstruct P, I, and D control functions. PID control Paul Avery Senior Product Training Engineer Yaskawa Electric America,
LESSON 2: ELECTRONIC CONTROL
 Module 1: Control Concepts LESSON 2: ELECTRONIC CONTROL MODULE 1 Control Concepts OBJECTIVES: At the end of this module, you will be able to: 1. Sketch an open tank level application and state the mass
Module 1: Control Concepts LESSON 2: ELECTRONIC CONTROL MODULE 1 Control Concepts OBJECTIVES: At the end of this module, you will be able to: 1. Sketch an open tank level application and state the mass
Report on Dynamic Temperature control of a Peltier device using bidirectional current source
 19 May 2017 Report on Dynamic Temperature control of a Peltier device using bidirectional current source Physics Lab, SSE LUMS M Shehroz Malik 17100068@lums.edu.pk A bidirectional current source is needed
19 May 2017 Report on Dynamic Temperature control of a Peltier device using bidirectional current source Physics Lab, SSE LUMS M Shehroz Malik 17100068@lums.edu.pk A bidirectional current source is needed
ChE 4162 Control Laboratory Methodologies Fall Control Laboratory Methodologies
 Control Laboratory Methodologies Edited by: HJT from Material by DBM 1/11 9/23/2016 1. Introduction There seem to be about as many ways to study and tune control systems as there are control engineers.
Control Laboratory Methodologies Edited by: HJT from Material by DBM 1/11 9/23/2016 1. Introduction There seem to be about as many ways to study and tune control systems as there are control engineers.
ISA Seminars on the Web Live Experts on Hot Topics
 ISA Seminars on the Web Live Experts on Hot Topics Standards Certification Education and Training Publishing Conferences and Exhibits CSE PE Exam Review: Control Systems EN00W4 Version 1.4 2011 Standards
ISA Seminars on the Web Live Experts on Hot Topics Standards Certification Education and Training Publishing Conferences and Exhibits CSE PE Exam Review: Control Systems EN00W4 Version 1.4 2011 Standards
Practical Guidelines for Identifying and Tuning PID Control Loops with Long Deadtime and/or Time Constants
 1 Practical Guidelines for Identifying and Tuning PID Control Loops with Long Deadtime and/or Time Constants Siemens Process Automation User Community Conference Advanced Control Case Studies Session B1
1 Practical Guidelines for Identifying and Tuning PID Control Loops with Long Deadtime and/or Time Constants Siemens Process Automation User Community Conference Advanced Control Case Studies Session B1
LECTURE 2: PD, PID, and Feedback Compensation. ( ) = + We consider various settings for Zc when compensating the system with the following RL:
 = + We consider various settings for Zc when compensating the system with the following RL:") LECTURE 2: PD, PID, and Feedback Compensation. 2.1 Ideal Derivative Compensation (PD) Generally, we want to speed up the transient response (decrease Ts and Tp). If we are lucky then a system s desired
LECTURE 2: PD, PID, and Feedback Compensation. 2.1 Ideal Derivative Compensation (PD) Generally, we want to speed up the transient response (decrease Ts and Tp). If we are lucky then a system s desired
Introduction To Temperature Controllers
 Introduction To Temperature Controllers The Miniature CN77000 is a full featured microprocessor-based controller in a 1/16 DIN package. How Can I Control My Process Temperature Accurately and Reliably?
Introduction To Temperature Controllers The Miniature CN77000 is a full featured microprocessor-based controller in a 1/16 DIN package. How Can I Control My Process Temperature Accurately and Reliably?
MAHARASHTRA STATE BOARD OF TECHNICAL EDUCATION (Autonomous) (ISO/IEC Certified) WINTER 14 EXAMINATION
 (ISO/IEC Certified) WINTER 14 EXAMINATION") Important Instructions to examiners: 1) The answers should be examined by keywords and not as word-to-word as given in the model answer scheme. 2) The model answer and the answer written by candidate may
Important Instructions to examiners: 1) The answers should be examined by keywords and not as word-to-word as given in the model answer scheme. 2) The model answer and the answer written by candidate may
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
User s Manual. Model US1000 Digital Indicating Controller Functions. IM 5D1A01-02E 2nd Edition IM 5D1A01-02E
 User s Manual Model US1000 Digital Indicating Controller Functions 2nd Edition Introduction This instruction manual describes the functions of the US1000 Digital Indicating Controller in detail. Read
User s Manual Model US1000 Digital Indicating Controller Functions 2nd Edition Introduction This instruction manual describes the functions of the US1000 Digital Indicating Controller in detail. Read
Control System for a Segway
 Control System for a Segway Jorge Morantes, Diana Espitia, Olguer Morales, Robinson Jiménez, Oscar Aviles Davinci Research Group, Militar Nueva Granada University, Bogotá, Colombia. Abstract In order to
Control System for a Segway Jorge Morantes, Diana Espitia, Olguer Morales, Robinson Jiménez, Oscar Aviles Davinci Research Group, Militar Nueva Granada University, Bogotá, Colombia. Abstract In order to
DeltaV v11 PID Enhancements for
 Aug 2010 Page 1 DeltaV v11 PID Enhancements for Wireless This document describes how enhancements to the PID block for wireless loops in DeltaV v11 improve performance, simplify tuning, and inherently
Aug 2010 Page 1 DeltaV v11 PID Enhancements for Wireless This document describes how enhancements to the PID block for wireless loops in DeltaV v11 improve performance, simplify tuning, and inherently
TC LV-Series Temperature Controllers V1.01
 TC LV-Series Temperature Controllers V1.01 Electron Dynamics Ltd, Kingsbury House, Kingsbury Road, Bevois Valley, Southampton, SO14 OJT Tel: +44 (0) 2380 480 800 Fax: +44 (0) 2380 480 801 e-mail support@electrondynamics.co.uk
TC LV-Series Temperature Controllers V1.01 Electron Dynamics Ltd, Kingsbury House, Kingsbury Road, Bevois Valley, Southampton, SO14 OJT Tel: +44 (0) 2380 480 800 Fax: +44 (0) 2380 480 801 e-mail support@electrondynamics.co.uk