Level control drain valve tuning. Walter Bischoff PE Brunswick Nuclear Plant
|
|
|
- Magnus Bates
- 5 years ago
- Views:
Transcription

1 Level control drain valve tuning Walter Bischoff PE Brunswick Nuclear Plant
2 Tuning Introduction Why is it important PI and PID controllers have been accepted throughout process design and all forms of controllers. Everyone has a PI and/or PID controllers in their station. PI and PID controllers are everywhere in your station some common areas include: FWHs level controllers (drains) Rx level control (SULCV) Drain tanks Tuning is an art and often hard to be a precise science EPRI Improper tuning can result in system instability in response to transients, loss of efficiency, Rx level oscillations. For a longer duration, improper tuning will result in unusual equipment degradation rates 2
3 Tuning basics Set Point (SP), Process Variable (PV), Output (OP) Controller: Generates a signal (output) in response to a process error detected by the feedback loop. The most common type is a PI (Proportional and Integral) Error (e): Difference between Set Point and Process Variable Proportional Response (P): The proportional response is a control response in which there is a continuous linear relationship between the output and the input. Proportional response can be obtained by multiplying the error (e) by the process Gain (K c ). Proportional Band (PB%): (Do not confuse with Gain or Proportional Term) Measured as a percent with respect to gain inverse x 100 PB = 100 / K c OR K c = 100 / PB Large gain = Large response, Large PB = Small response P out = K c x (e) * (t) For an error with a magnitude of 10 and a controller gain of 5 the response would be 50. 3

4 Tuning basics Gain comparison This simulation lacks offset 4

5 Tuning basics Integral Response (I): Intended to eliminate offset. Integral sums up the error over time. When (e) = 0 controller output is likely not equal to 0. Units may be in resets/min OR minutes / reset. Response is based on a rate of change Gain alone is difficult to tune to. Excessive gain will result in overshoot, insufficient gain will result in large offset from PV and SP. Hysteresis: Some devices will yield a different PV for the same OP depending on whether the OP went up or down to get there. A valve might allow 25 GPM through after moving from 20% to 30%, but 30 GPM after moving from 40% to 30% (too low of gain or no integral) Offset: difference between set point and process variable. Tank with drain valve (P) Tank with inlet and outlet flow (I) 5

6 Tuning basics Integral comparison Comparison of what an integral and proportional bands 6

7 Tuning basics After inducing an upset, the PV is approaches the SP. Proportional and Integral react in opposite directions. Allows PV of a well tuned loop to approach the SP without excessively overshooting or undershooting. In a typical reverse-acting loop, the proportional will try to lower the OP as the PV rises toward the SP. The integral response will raise the OP because PV is below SP. As the PV gets closer to the SP, integral action decreases resulting in the PV smoothly decelerating into the SP. 7
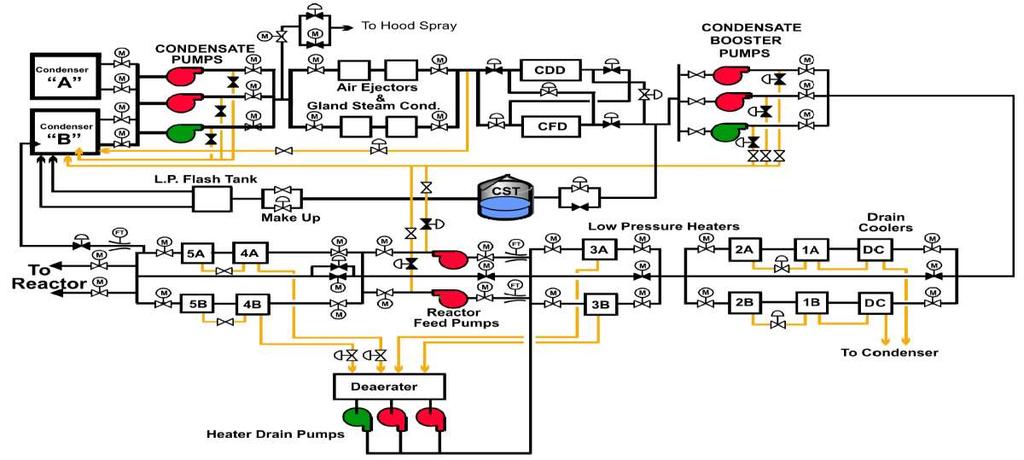
8 BNP OE event discussion Post EPU and satisfactory performance Series of inputs and outputs from the loop The loops is normally operated with 3 condensate pumps In March 2015 B222R1 refueling outage, Condensate Margin project was implemented. Allows the station allowed to transition from 3 to 2 condensate pump operation. 8
9 9
10 Comparison of Unit 1 (2 pumps) and Unit 2 (3 pumps) CBP discharge header Plot \\HST_BNP\U1CODL PSIG \\HST_BNP\U2CODL PSIG This simulation lacks offset /21/2015 6:01:39 AM hours U1 CBP Disch Hdr Press U2 CBP Disch Hdr Press 5/22/2015 6:01:39 AM 10
11 Transitioning from 3 to 2 Cond pump operation Irregularities observed On 5/26/15 at 0954 Operations transitioned from three to two condensate pump operation. After securing the third condensate pump, system pressure dropped and system oscillations were observed. This shift in performance and system pressure oscillations have been present since securing the 3 rd condensate pump and have not deviated. Booster pump discharge header pressure dropped expectedly from 320 to 260 psig. Unexpected psi CBP pressure oscillations and HDD level oscillations 44 to 52 inches. Normal level is ~48 inches +/- 0.5 inches. Concern over opening HDD backup dump valve, HDD pump trip, CBP auto start, RFP suction pressure alarms. Operations started the 3 rd condensate pump. Oscillations stopped and pressures returned to normal. 11
12 Comparison of Unit 1 and Unit 2 CBP discharge header in 2 pump operation Plot \\HST_BNP\U1CODL PSIG \\HST_BNP\U2CODL PSIG This simulation lacks offset /26/2015 1:56:00 PM hours U1 CBP Disch Hdr Press U2 CBP Disch Hdr Press 5/27/2015 1:56:00 PM 12
13 Tuning basics 13
14 Heater drain pump performance Single controller 2-HD-LC-91 receives input from the HDD tank level element. The controller output goes to 3 individual positioners and valve actuators. The controller output began at 67.5% output and dropped 4% and quickly recovered by 2% output. The output continued to decline until output was 52.5%. Overall, there was a 15% decline in output with sawtooth patterns. Once the 3rd condensate pump was restored to service, the controller output only oscillated between 54 to 57% in a stable sinusoidal. In two condensate pump operation, the HDD control valve position was observed at approximately 27% open. In three condensate pump operation, the HDD control valve position was observed at approximately 47% open. Known fact, the HDD discharge valves are oversized and are expected to operated more closed than open. 14
15 Corrective Actions Performed in 2010 In 2010 a new valve trim was installed with quick opening characteristics. Tuning was performed for 3 HDD pumps. Outside contractor requested to perform evaluation and provide tuning characteristics. Controller tuning parameters as-left settings 3.4 Gain and 1.55 min/reset. Pressure oscillations were normal psig (as seen in the first graph) Satisfactory performance observed. 15
16 Investigation Performed in 2015 Compared positioner responses between A and B HDP discharge valve positioners (equipped with feedback arm). Dissimilar outputs and valve position indicates degradation in the positioner or valve. Similar responses in output and feedback observed Confirmed valves were further closed Swapped from A and B HDPs to A and C HDPs to assess the performance in the C and B loops and determine system sensitivity. No change in performance obseved Observed all other inputs and extractions from the loop to/from external reservoir or loop. Observed internal extractions and return lines such as the FWHs and RFP speed controls. There was NO apparent cause relating to equipment damage or externally induced. 16
17 Former and new valve curve with new trim Post-2010 valve curve Pre-2010 valve curve 17
18 Corrective Actions Performed in 2015 The new valve trim was changed to a quick opening trim. Throttling valves operate as a steady state, steady flow device. The entering and exiting mass flow rates are the same; i.e. flow is continuous, and the Continuity Equation is applicable 18
19 Post Tuning results Plot \\HST_BNP\U1CODL PSIG \\HST_BNP\U2CODL PSIG This simulation lacks offset /15/2015 1:56:00 PM hours U1 CBP Disch Hdr Press U2 CBP Disch Hdr Press 6/16/2015 1:56:00 PM 19
20 Closer look at finding tuning issues Component changes Make sure your EC package contains tuning evaluation and basis. Tuning should only be performed ONLY when all other plausible failure modes have been ruled out. Maybe you have a latent failure mode? Following a new plant mod or change operations. Did you: Install a new component such as a valve? Transition from a 2(3) pump operation to 3(2) pump operation? Implement EPU? ANYTHING that may affect flowrates Or maybe no one has ever noticed it 20
21 21
22 How to tune Requires access to adequate trending parameters especially Set Point, Controller Output, and Process Variable. Most controllers start with a gain of 1.0 (PB 100%) and a reset of 1.0 rpm. Tuning should be performed with a simulator or when there are no margin concerns such as auto pump starts, trips, and no impact on reactivity. Approximation: Loops where the PV changes quickly due to a change in Output (flow, or pressure or level in vessels with fast turnover) should have low Gain (Higher PB) perhaps 0.2 (20%) and higher reset ( rpm). Loops where the PV changes slowly, or changes its direction of movement due to change in Output (temperature and level in vessels with slow turnover) typically need high gain (3 100) and low reset ( ). 22
23 How to tune Several approaches. However it is your choice of what method you use. All have advantages and disadvantages. Tuning methods include: Ziegler-Nichols Method Trial and error Cohen-Coon method Process Reaction Curve Quarter wave dampening (preferred) 23
24 How to tune Process reaction curve 24
25 How to tune Process reaction curve 25
26 How to tune Ziegler-Nichols Method Remove integral and derivative action. Set integral time (T i ) to 999 or its largest value and set the derivative controller (T d ) to zero. Create a small disturbance in the loop by changing the set point. Adjust the proportional, increasing and/or decreasing, the gain until the oscillations have constant amplitude. Record the gain value (K u ) and period of oscillation (P u ). Use the following table to obtain new settings 26

27 How to tune Ziegler-Nichols Method 27
28 How to tune Quarterwave Quarter wave dampening approach. A good method to determine a decent setting. Induce an upset and ideally try to obtain this result No basis for the 0.25 ratio. However it has been successful and recognized in the industry including EPRI documents. 28
29 How to tune When you really can t tune At BNP management challenge denied original tuning plan to combination Ziegler-Nichols Method / QWD approach. HDD trip would trip the 3, 4, and 5 FWHs (6 total) on Hi-Hi level OR trip all HDPs on Low- Low level (both would result in a major power reduction) Talk of taking the integral band to the max AND inducing an upset is very uneasy given the already unstable controller. Tuning plant equipment while in service and connected directly to feedwater and reactivity is high-risk. Tuning should be performed when you are at full power operation. Do not tune at 50% power and ride up to 100% expecting similar results. Consider using the plant simulator to tune. Verify the accuracy of the simulator before attempting to tune. Most simulators you can tune equipment 29
30 Do not tune at reduced power Observed flowrates during start up 30
31 How to tune tips Apply Engineering Judgement (that term everyone is so afraid of) Be patient and watch the controllers, outputs and Process Variables. The Control valves on the HDD had response times (to respond, overshoot, settle) of over 5 minutes. Compare performance across units and across trains. If the valve was properly tuned in the past and plant conditions change tuning the gain alone should be sufficient. At BNP the Gain on the HDD controller was reduced by half. Induced a set point change and achieved the Quarter wave dampening performance that was desired. There are likely multiple tuning parameters that will deliver satisfactory performance. Do not look for one specific set of parameters 31
32 How to tune tips Quarter Wave dampening is important to verify you did not over dampen the controller. At steady state a dampened controller will appear stable. However if there is a plant transient, the controller may not be quick enough to recover. 32
33 Questions 33
34 34
Experiment 9. PID Controller
 Experiment 9 PID Controller Objective: - To be familiar with PID controller. - Noting how changing PID controller parameter effect on system response. Theory: The basic function of a controller is to execute
Experiment 9 PID Controller Objective: - To be familiar with PID controller. - Noting how changing PID controller parameter effect on system response. Theory: The basic function of a controller is to execute
Different Controller Terms
 Loop Tuning Lab Challenges Not all PID controllers are the same. They don t all use the same units for P-I-and D. There are different types of processes. There are different final element types. There
Loop Tuning Lab Challenges Not all PID controllers are the same. They don t all use the same units for P-I-and D. There are different types of processes. There are different final element types. There
International Journal of Research in Advent Technology Available Online at:
 OVERVIEW OF DIFFERENT APPROACHES OF PID CONTROLLER TUNING Manju Kurien 1, Alka Prayagkar 2, Vaishali Rajeshirke 3 1 IS Department 2 IE Department 3 EV DEpartment VES Polytechnic, Chembur,Mumbai 1 manjulibu@gmail.com
OVERVIEW OF DIFFERENT APPROACHES OF PID CONTROLLER TUNING Manju Kurien 1, Alka Prayagkar 2, Vaishali Rajeshirke 3 1 IS Department 2 IE Department 3 EV DEpartment VES Polytechnic, Chembur,Mumbai 1 manjulibu@gmail.com
Getting the Best Performance from Challenging Control Loops
 Getting the Best Performance from Challenging Control Loops Jacques F. Smuts - OptiControls Inc, League City, Texas; jsmuts@opticontrols.com KEYWORDS PID Controls, Oscillations, Disturbances, Tuning, Stiction,
Getting the Best Performance from Challenging Control Loops Jacques F. Smuts - OptiControls Inc, League City, Texas; jsmuts@opticontrols.com KEYWORDS PID Controls, Oscillations, Disturbances, Tuning, Stiction,
Procidia Control Solutions Dead Time Compensation
 APPLICATION DATA Procidia Control Solutions Dead Time Compensation AD353-127 Rev 2 April 2012 This application data sheet describes dead time compensation methods. A configuration can be developed within
APPLICATION DATA Procidia Control Solutions Dead Time Compensation AD353-127 Rev 2 April 2012 This application data sheet describes dead time compensation methods. A configuration can be developed within
CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING. Professor Dae Ryook Yang
 CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 11-1 Road Map of the Lecture XI Controller Design and PID
CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 11-1 Road Map of the Lecture XI Controller Design and PID
Controller Algorithms and Tuning
 The previous sections of this module described the purpose of control, defined individual elements within control loops, and demonstrated the symbology used to represent those elements in an engineering
The previous sections of this module described the purpose of control, defined individual elements within control loops, and demonstrated the symbology used to represent those elements in an engineering
The Discussion of this exercise covers the following points: Angular position control block diagram and fundamentals. Power amplifier 0.
 Exercise 6 Motor Shaft Angular Position Control EXERCISE OBJECTIVE When you have completed this exercise, you will be able to associate the pulses generated by a position sensing incremental encoder with
Exercise 6 Motor Shaft Angular Position Control EXERCISE OBJECTIVE When you have completed this exercise, you will be able to associate the pulses generated by a position sensing incremental encoder with
Paul Schafbuch. Senior Research Engineer Fisher Controls International, Inc.
 Paul Schafbuch Senior Research Engineer Fisher Controls International, Inc. Introduction Achieving optimal control system performance keys on selecting or specifying the proper flow characteristic. Therefore,
Paul Schafbuch Senior Research Engineer Fisher Controls International, Inc. Introduction Achieving optimal control system performance keys on selecting or specifying the proper flow characteristic. Therefore,
CHAPTER 2 PID CONTROLLER BASED CLOSED LOOP CONTROL OF DC DRIVE
 23 CHAPTER 2 PID CONTROLLER BASED CLOSED LOOP CONTROL OF DC DRIVE 2.1 PID CONTROLLER A proportional Integral Derivative controller (PID controller) find its application in industrial control system. It
23 CHAPTER 2 PID CONTROLLER BASED CLOSED LOOP CONTROL OF DC DRIVE 2.1 PID CONTROLLER A proportional Integral Derivative controller (PID controller) find its application in industrial control system. It
-binary sensors and actuators (such as an on/off controller) are generally more reliable and less expensive
 are generally more reliable and less expensive") Process controls are necessary for designing safe and productive plants. A variety of process controls are used to manipulate processes, however the most simple and often most effective is the PID controller.
Process controls are necessary for designing safe and productive plants. A variety of process controls are used to manipulate processes, however the most simple and often most effective is the PID controller.
Introduction To Temperature Controllers
 Introduction To Temperature Controllers The Miniature CN77000 is a full featured microprocessor-based controller in a 1/16 DIN package. How Can I Control My Process Temperature Accurately and Reliably?
Introduction To Temperature Controllers The Miniature CN77000 is a full featured microprocessor-based controller in a 1/16 DIN package. How Can I Control My Process Temperature Accurately and Reliably?
CHAPTER 4 PID CONTROLLER BASED SPEED CONTROL OF THREE PHASE INDUCTION MOTOR
 36 CHAPTER 4 PID CONTROLLER BASED SPEED CONTROL OF THREE PHASE INDUCTION MOTOR 4.1 INTRODUCTION Now a day, a number of different controllers are used in the industry and in many other fields. In a quite
36 CHAPTER 4 PID CONTROLLER BASED SPEED CONTROL OF THREE PHASE INDUCTION MOTOR 4.1 INTRODUCTION Now a day, a number of different controllers are used in the industry and in many other fields. In a quite
Closed-Loop Position Control, Proportional Mode
 Exercise 4 Closed-Loop Position Control, Proportional Mode EXERCISE OBJECTIVE To describe the proportional control mode; To describe the advantages and disadvantages of proportional control; To define
Exercise 4 Closed-Loop Position Control, Proportional Mode EXERCISE OBJECTIVE To describe the proportional control mode; To describe the advantages and disadvantages of proportional control; To define
PID Control Technical Notes
 PID Control Technical Notes General PID (Proportional-Integral-Derivative) control action allows the process control to accurately maintain setpoint by adjusting the control outputs. In this technical
PID Control Technical Notes General PID (Proportional-Integral-Derivative) control action allows the process control to accurately maintain setpoint by adjusting the control outputs. In this technical
MM7 Practical Issues Using PID Controllers
 MM7 Practical Issues Using PID Controllers Readings: FC textbook: Section 4.2.7 Integrator Antiwindup p.196-200 Extra reading: Hou Ming s lecture notes p.60-69 Extra reading: M.J. Willis notes on PID controler
MM7 Practical Issues Using PID Controllers Readings: FC textbook: Section 4.2.7 Integrator Antiwindup p.196-200 Extra reading: Hou Ming s lecture notes p.60-69 Extra reading: M.J. Willis notes on PID controler
LESSON 2: ELECTRONIC CONTROL
 Module 1: Control Concepts LESSON 2: ELECTRONIC CONTROL MODULE 1 Control Concepts OBJECTIVES: At the end of this module, you will be able to: 1. Sketch an open tank level application and state the mass
Module 1: Control Concepts LESSON 2: ELECTRONIC CONTROL MODULE 1 Control Concepts OBJECTIVES: At the end of this module, you will be able to: 1. Sketch an open tank level application and state the mass
Control Theory. This course will examine the control functions found in HVAC systems and explain the different applications where they are applied.
 Introduction The purpose of automatic HVAC system control is to modify equipment performance to balance system capacity with prevailing load requirements. All automatic control systems do not employ the
Introduction The purpose of automatic HVAC system control is to modify equipment performance to balance system capacity with prevailing load requirements. All automatic control systems do not employ the
PID control. since Similarly, modern industrial
 Control basics Introduction to For deeper understanding of their usefulness, we deconstruct P, I, and D control functions. PID control Paul Avery Senior Product Training Engineer Yaskawa Electric America,
Control basics Introduction to For deeper understanding of their usefulness, we deconstruct P, I, and D control functions. PID control Paul Avery Senior Product Training Engineer Yaskawa Electric America,
Understanding PID Control
 1 of 5 2/20/01 1:15 PM Understanding PID Control Familiar examples show how and why proportional-integral-derivative controllers behave the way they do. Keywords: Process control Control theory Controllers
1 of 5 2/20/01 1:15 PM Understanding PID Control Familiar examples show how and why proportional-integral-derivative controllers behave the way they do. Keywords: Process control Control theory Controllers
Think About Control Fundamentals Training. Terminology Control. Eko Harsono Control Fundamental - Con't
 Think About Control Fundamentals Training Terminology Control Eko Harsono eko.harsononus@gmail.com; 1 Contents Topics: Slide No: Advance Control Loop 3-10 Control Algorithm 11-25 Control System 26-32 Exercise
Think About Control Fundamentals Training Terminology Control Eko Harsono eko.harsononus@gmail.com; 1 Contents Topics: Slide No: Advance Control Loop 3-10 Control Algorithm 11-25 Control System 26-32 Exercise
PID. What is PID and how does it work? Auto tuning PID with the 5400 Controller. Visit our website at:
 PID What is PID and how does it work? Auto tuning PID with the 5400 Controller What is PID? PID control (pronounced P-eye-Dee) stands for Proportional-Integral-Derivative, and is a mathematical method
PID What is PID and how does it work? Auto tuning PID with the 5400 Controller What is PID? PID control (pronounced P-eye-Dee) stands for Proportional-Integral-Derivative, and is a mathematical method
Application Note. Renu Electronics Private Limited. PID Instruction In IEC. Page 1
 Application Note PID Instruction In IEC This document explains about PID Instruction in IEC. This application note is applicable for FP and FL products (IEC Supported). www.renuelectronics.com Page 1 Contents
Application Note PID Instruction In IEC This document explains about PID Instruction in IEC. This application note is applicable for FP and FL products (IEC Supported). www.renuelectronics.com Page 1 Contents
Configuration Example of Temperature Control
 Controllers Technical Information Configuration Example of Control controllers The following is an example of the configuration of temperature control. Controller Relay Voltage Current SSR Cycle controller
Controllers Technical Information Configuration Example of Control controllers The following is an example of the configuration of temperature control. Controller Relay Voltage Current SSR Cycle controller
Class 5. Competency Exam Round 1. The Process Designer s Process. Process Control Preliminaries. On/Off Control The Simplest Controller
 Class 5 Competency Exam Round 1 Proportional Control Starts Friday, September 17 Ends Friday, October 1 Process Control Preliminaries The final control element, process and sensor/transmitter all have
Class 5 Competency Exam Round 1 Proportional Control Starts Friday, September 17 Ends Friday, October 1 Process Control Preliminaries The final control element, process and sensor/transmitter all have
PROCESS DYNAMICS AND CONTROL
 Objectives of the Class PROCESS DYNAMICS AND CONTROL CHBE320, Spring 2018 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering What is process control? Basics of process control Basic hardware
Objectives of the Class PROCESS DYNAMICS AND CONTROL CHBE320, Spring 2018 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering What is process control? Basics of process control Basic hardware
Process Control Laboratory Using Honeywell PlantScape
 Process Control Laboratory Using Honeywell PlantScape Christi Patton Luks, Laura P. Ford University of Tulsa Abstract The University of Tulsa has recently revised its process controls class from one 3-hour
Process Control Laboratory Using Honeywell PlantScape Christi Patton Luks, Laura P. Ford University of Tulsa Abstract The University of Tulsa has recently revised its process controls class from one 3-hour
Neural Network Predictive Controller for Pressure Control
 Neural Network Predictive Controller for Pressure Control ZAZILAH MAY 1, MUHAMMAD HANIF AMARAN 2 Department of Electrical and Electronics Engineering Universiti Teknologi PETRONAS Bandar Seri Iskandar,
Neural Network Predictive Controller for Pressure Control ZAZILAH MAY 1, MUHAMMAD HANIF AMARAN 2 Department of Electrical and Electronics Engineering Universiti Teknologi PETRONAS Bandar Seri Iskandar,
F. Greg Shinskey. "PID Control." Copyright 2000 CRC Press LLC. <
 F. Greg Shinskey. "PID Control." Copyright 2000 CRC Press LLC. . PID Control F. Greg Shinskey Process Control Consultant 97.1 Introduction 97.2 Open and Closed Loops Open-Loop
F. Greg Shinskey. "PID Control." Copyright 2000 CRC Press LLC. . PID Control F. Greg Shinskey Process Control Consultant 97.1 Introduction 97.2 Open and Closed Loops Open-Loop
Instrumentation and Process Control. Process Control. Pressure, Flow, and Level. Courseware Sample F0
 Instrumentation and Process Control Process Control Pressure, Flow, and Level Courseware Sample 85982-F0 A INSTRUMENTATION AND PROCESS CONTROL PROCESS CONTROL Pressure, Flow, and Level Courseware Sample
Instrumentation and Process Control Process Control Pressure, Flow, and Level Courseware Sample 85982-F0 A INSTRUMENTATION AND PROCESS CONTROL PROCESS CONTROL Pressure, Flow, and Level Courseware Sample
Introduction To Temperature Controllers
 Introduction To Temperature Controllers The Miniature CN77000 is a full featured microprocessor-based controller in a 1/16 DIN package. How Can I Control My Process Temperature Accurately and Reliably?
Introduction To Temperature Controllers The Miniature CN77000 is a full featured microprocessor-based controller in a 1/16 DIN package. How Can I Control My Process Temperature Accurately and Reliably?
1. Consider the closed loop system shown in the figure below. Select the appropriate option to implement the system shown in dotted lines using
 1. Consider the closed loop system shown in the figure below. Select the appropriate option to implement the system shown in dotted lines using op-amps a. b. c. d. Solution: b) Explanation: The dotted
1. Consider the closed loop system shown in the figure below. Select the appropriate option to implement the system shown in dotted lines using op-amps a. b. c. d. Solution: b) Explanation: The dotted
STANDARD TUNING PROCEDURE AND THE BECK DRIVE: A COMPARATIVE OVERVIEW AND GUIDE
 STANDARD TUNING PROCEDURE AND THE BECK DRIVE: A COMPARATIVE OVERVIEW AND GUIDE Scott E. Kempf Harold Beck and Sons, Inc. 2300 Terry Drive Newtown, PA 18946 STANDARD TUNING PROCEDURE AND THE BECK DRIVE:
STANDARD TUNING PROCEDURE AND THE BECK DRIVE: A COMPARATIVE OVERVIEW AND GUIDE Scott E. Kempf Harold Beck and Sons, Inc. 2300 Terry Drive Newtown, PA 18946 STANDARD TUNING PROCEDURE AND THE BECK DRIVE:
Relay Based Auto Tuner for Calibration of SCR Pump Controller Parameters in Diesel after Treatment Systems
 Abstract Available online at www.academicpaper.org Academic @ Paper ISSN 2146-9067 International Journal of Automotive Engineering and Technologies Special Issue 1, pp. 26 33, 2017 Original Research Article
Abstract Available online at www.academicpaper.org Academic @ Paper ISSN 2146-9067 International Journal of Automotive Engineering and Technologies Special Issue 1, pp. 26 33, 2017 Original Research Article
Servo Tuning Tutorial
 Servo Tuning Tutorial 1 Presentation Outline Introduction Servo system defined Why does a servo system need to be tuned Trajectory generator and velocity profiles The PID Filter Proportional gain Derivative
Servo Tuning Tutorial 1 Presentation Outline Introduction Servo system defined Why does a servo system need to be tuned Trajectory generator and velocity profiles The PID Filter Proportional gain Derivative
GL101B Intelligent Temperature Controller User s Guide
 GL101B Intelligent Temperature Controller User s Guide 1 Caution Abnormal operating conditions can lead to one or more undesirable events that, in turn, could lead to injury to personnel or damage to the
GL101B Intelligent Temperature Controller User s Guide 1 Caution Abnormal operating conditions can lead to one or more undesirable events that, in turn, could lead to injury to personnel or damage to the
PROCESS DYNAMICS AND CONTROL
 PROCESS DYNAMICS AND CONTROL CHBE306, Fall 2017 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering Korea University Korea University 1-1 Objectives of the Class What is process control?
PROCESS DYNAMICS AND CONTROL CHBE306, Fall 2017 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering Korea University Korea University 1-1 Objectives of the Class What is process control?
Optimal Control System Design
 Chapter 6 Optimal Control System Design 6.1 INTRODUCTION The active AFO consists of sensor unit, control system and an actuator. While designing the control system for an AFO, a trade-off between the transient
Chapter 6 Optimal Control System Design 6.1 INTRODUCTION The active AFO consists of sensor unit, control system and an actuator. While designing the control system for an AFO, a trade-off between the transient
Module 08 Controller Designs: Compensators and PIDs
 Module 08 Controller Designs: Compensators and PIDs Ahmad F. Taha EE 3413: Analysis and Desgin of Control Systems Email: ahmad.taha@utsa.edu Webpage: http://engineering.utsa.edu/ taha March 31, 2016 Ahmad
Module 08 Controller Designs: Compensators and PIDs Ahmad F. Taha EE 3413: Analysis and Desgin of Control Systems Email: ahmad.taha@utsa.edu Webpage: http://engineering.utsa.edu/ taha March 31, 2016 Ahmad
GL102 Intelligent Temperature Controller User s Guide
 GL102 Intelligent Temperature Controller User s Guide 1 Caution Abnormal operating conditions can lead to one or more undesirable events that, in turn, could lead to injury to personnel or damage to the
GL102 Intelligent Temperature Controller User s Guide 1 Caution Abnormal operating conditions can lead to one or more undesirable events that, in turn, could lead to injury to personnel or damage to the
InstrumentationTools.com
 Author: Instrumentation Tools Categories: Control Systems Ziegler-Nichols Closed-Loop Method (Ultimate Gain) Closed-loop refers to the operation of a control system with the controlling device in automatic
Author: Instrumentation Tools Categories: Control Systems Ziegler-Nichols Closed-Loop Method (Ultimate Gain) Closed-loop refers to the operation of a control system with the controlling device in automatic
Gain From Using One of Process Control's Emerging Tools: Power Spectrum
 Gain From Using One of Process Control's Emerging Tools: Power Spectrum By Michel Ruel (TOP Control) and John Gerry (ExperTune Inc.) Process plants are starting to get big benefits from a widely available
Gain From Using One of Process Control's Emerging Tools: Power Spectrum By Michel Ruel (TOP Control) and John Gerry (ExperTune Inc.) Process plants are starting to get big benefits from a widely available
ChE 4162 Control Laboratory Methodologies Fall Control Laboratory Methodologies
 Control Laboratory Methodologies Edited by: HJT from Material by DBM 1/11 9/23/2016 1. Introduction There seem to be about as many ways to study and tune control systems as there are control engineers.
Control Laboratory Methodologies Edited by: HJT from Material by DBM 1/11 9/23/2016 1. Introduction There seem to be about as many ways to study and tune control systems as there are control engineers.
VOLTAGE STABILITY OF THE NORDIC TEST SYSTEM
 1 VOLTAGE STABILITY OF THE NORDIC TEST SYSTEM Thierry Van Cutsem Department of Electrical and Computer Engineering University of Liège, Belgium Modified version of a presentation at the IEEE PES General
1 VOLTAGE STABILITY OF THE NORDIC TEST SYSTEM Thierry Van Cutsem Department of Electrical and Computer Engineering University of Liège, Belgium Modified version of a presentation at the IEEE PES General
TEMPERATURE PROCESS CONTROL MANUAL. Penn State Chemical Engineering
 TEMPERATURE PROCESS CONTROL MANUAL Penn State Chemical Engineering Revised Summer 2015 Contents LEARNING OBJECTIVES... 3 EXPERIMENTAL OBJECTIVES AND OVERVIEW... 3 Pre-lab study:... 3 Experiments in the
TEMPERATURE PROCESS CONTROL MANUAL Penn State Chemical Engineering Revised Summer 2015 Contents LEARNING OBJECTIVES... 3 EXPERIMENTAL OBJECTIVES AND OVERVIEW... 3 Pre-lab study:... 3 Experiments in the
6.4 Adjusting PID Manually
 Setting Display Parameter Setting Display Operation Display > PARAMETER or PARA key for 3 seconds (to [MODE] Menu Display) > Right arrow key (to [PID] Menu Display ) > SET/ENTER key (The setting parameter
Setting Display Parameter Setting Display Operation Display > PARAMETER or PARA key for 3 seconds (to [MODE] Menu Display) > Right arrow key (to [PID] Menu Display ) > SET/ENTER key (The setting parameter
ChE 436 Lab Project 1 Armfield Level Control
 ChE 436 Lab Project 1 Armfield Level Control This process control lab is located in the south end of the UO Lab. You are to work on this project in groups of four, and turn in a common report for the group.
ChE 436 Lab Project 1 Armfield Level Control This process control lab is located in the south end of the UO Lab. You are to work on this project in groups of four, and turn in a common report for the group.
Position Control of DC Motor by Compensating Strategies
 Position Control of DC Motor by Compensating Strategies S Prem Kumar 1 J V Pavan Chand 1 B Pangedaiah 1 1. Assistant professor of Laki Reddy Balireddy College Of Engineering, Mylavaram Abstract - As the
Position Control of DC Motor by Compensating Strategies S Prem Kumar 1 J V Pavan Chand 1 B Pangedaiah 1 1. Assistant professor of Laki Reddy Balireddy College Of Engineering, Mylavaram Abstract - As the
Proportional pressure controller
 Proportional pressure controller Introduction I. Introducing : Proportional Pressure Controller Input signal I or E Output pressure The MAC Proportional Pressure Controller, (PPC) is an innovative product
Proportional pressure controller Introduction I. Introducing : Proportional Pressure Controller Input signal I or E Output pressure The MAC Proportional Pressure Controller, (PPC) is an innovative product
Design of Self-Tuning Fuzzy PI controller in LABVIEW for Control of a Real Time Process
 International Journal of Electronics and Computer Science Engineering 538 Available Online at www.ijecse.org ISSN- 2277-1956 Design of Self-Tuning Fuzzy PI controller in LABVIEW for Control of a Real Time
International Journal of Electronics and Computer Science Engineering 538 Available Online at www.ijecse.org ISSN- 2277-1956 Design of Self-Tuning Fuzzy PI controller in LABVIEW for Control of a Real Time
Find, read or write documentation which describes work of the control loop: Process Control Philosophy. Where the next information can be found:
 1 Controller uning o implement continuous control we should assemble a control loop which consists of the process/object, controller, sensors and actuators. Information about the control loop Find, read
1 Controller uning o implement continuous control we should assemble a control loop which consists of the process/object, controller, sensors and actuators. Information about the control loop Find, read
PROCESS CONTROL DIAGNOSTICS. F. Greg Shinskey Process Control Consultant North Sandwich, NH 03259
 PROCESS CONTROL DIAGNOSTICS F. Greg Shinskey Process Control Consultant North Sandwich, NH 03259 Abstract With all the tuning methods documented, it is remarkable how often controllers are mistuned, focusing
PROCESS CONTROL DIAGNOSTICS F. Greg Shinskey Process Control Consultant North Sandwich, NH 03259 Abstract With all the tuning methods documented, it is remarkable how often controllers are mistuned, focusing
PID Tuner (ver. 1.0)
") PID Tuner (ver. 1.0) Product Help Czech Technical University in Prague Faculty of Mechanical Engineering Department of Instrumentation and Control Engineering This product was developed within the subject
PID Tuner (ver. 1.0) Product Help Czech Technical University in Prague Faculty of Mechanical Engineering Department of Instrumentation and Control Engineering This product was developed within the subject
Comparative Study of PID Controller tuning methods using ASPEN HYSYS
 Comparative Study of PID Controller tuning methods using ASPEN HYSYS Bhavatharini S #1, Abirami S #2, Arun Prem Anand N #3 # Department of Chemical Engineering, Sri Venkateswara College of Engineering
Comparative Study of PID Controller tuning methods using ASPEN HYSYS Bhavatharini S #1, Abirami S #2, Arun Prem Anand N #3 # Department of Chemical Engineering, Sri Venkateswara College of Engineering
Fundamentals of Servo Motion Control
 Fundamentals of Servo Motion Control The fundamental concepts of servo motion control have not changed significantly in the last 50 years. The basic reasons for using servo systems in contrast to open
Fundamentals of Servo Motion Control The fundamental concepts of servo motion control have not changed significantly in the last 50 years. The basic reasons for using servo systems in contrast to open
Closed Loop Control System. Controllers. Analog Controller. Prof. Dr. M. Zahurul Haq
 Closed Loop Control System Prof. Dr. M. Zahurul Haq http://teacher.buet.ac.bd/zahurul/ Department of Mechanical Engineering Bangladesh University of Engineering & Technology ME 6401: Advanced Mechatronics
Closed Loop Control System Prof. Dr. M. Zahurul Haq http://teacher.buet.ac.bd/zahurul/ Department of Mechanical Engineering Bangladesh University of Engineering & Technology ME 6401: Advanced Mechatronics
Design of Model Based PID Controller Tuning for Pressure Process
 ISSN (Print) : 3 3765 Design of Model Based PID Controller Tuning for Pressure Process A.Kanchana 1, G.Lavanya, R.Nivethidha 3, S.Subasree 4, P.Aravind 5 UG student, Dept. of ICE, Saranathan College Engineering,
ISSN (Print) : 3 3765 Design of Model Based PID Controller Tuning for Pressure Process A.Kanchana 1, G.Lavanya, R.Nivethidha 3, S.Subasree 4, P.Aravind 5 UG student, Dept. of ICE, Saranathan College Engineering,
STABILITY IMPROVEMENT OF POWER SYSTEM BY USING PSS WITH PID AVR CONTROLLER IN THE HIGH DAM POWER STATION ASWAN EGYPT
 3 rd International Conference on Energy Systems and Technologies 16 19 Feb. 2015, Cairo, Egypt STABILITY IMPROVEMENT OF POWER SYSTEM BY USING PSS WITH PID AVR CONTROLLER IN THE HIGH DAM POWER STATION ASWAN
3 rd International Conference on Energy Systems and Technologies 16 19 Feb. 2015, Cairo, Egypt STABILITY IMPROVEMENT OF POWER SYSTEM BY USING PSS WITH PID AVR CONTROLLER IN THE HIGH DAM POWER STATION ASWAN
6.9 Jump frequency - Avoiding frequency resonance
 E581595.9 Jump frequency - Avoiding frequency resonance : Jump frequency : Jumping width Function Resonance due to the natural frequency of the mechanical system can be avoided by jumping the resonant
E581595.9 Jump frequency - Avoiding frequency resonance : Jump frequency : Jumping width Function Resonance due to the natural frequency of the mechanical system can be avoided by jumping the resonant
Closed-Loop Speed Control, Proportional-Plus-Integral-Plus-Derivative Mode
 Exercise 7 Closed-Loop Speed Control, EXERCISE OBJECTIVE To describe the derivative control mode; To describe the advantages and disadvantages of derivative control; To describe the proportional-plus-integral-plus-derivative
Exercise 7 Closed-Loop Speed Control, EXERCISE OBJECTIVE To describe the derivative control mode; To describe the advantages and disadvantages of derivative control; To describe the proportional-plus-integral-plus-derivative
Laboratory PID Tuning Based On Frequency Response Analysis. 2. be able to evaluate system performance for empirical tuning method;
 Laboratory PID Tuning Based On Frequency Response Analysis Objectives: At the end, student should 1. appreciate a systematic way of tuning PID loop by the use of process frequency response analysis; 2.
Laboratory PID Tuning Based On Frequency Response Analysis Objectives: At the end, student should 1. appreciate a systematic way of tuning PID loop by the use of process frequency response analysis; 2.
SxWEB PID algorithm experimental tuning
 SxWEB PID algorithm experimental tuning rev. 0.3, 13 July 2017 Index 1. PID ALGORITHM SX2WEB24 SYSTEM... 2 2. PID EXPERIMENTAL TUNING IN THE SX2WEB24... 3 2.1 OPEN LOOP TUNING PROCEDURE... 3 2.1.1 How
SxWEB PID algorithm experimental tuning rev. 0.3, 13 July 2017 Index 1. PID ALGORITHM SX2WEB24 SYSTEM... 2 2. PID EXPERIMENTAL TUNING IN THE SX2WEB24... 3 2.1 OPEN LOOP TUNING PROCEDURE... 3 2.1.1 How
Logic Developer Process Edition Function Blocks
 GE Intelligent Platforms Logic Developer Process Edition Function Blocks Delivering increased precision and enabling advanced regulatory control strategies for continuous process control Logic Developer
GE Intelligent Platforms Logic Developer Process Edition Function Blocks Delivering increased precision and enabling advanced regulatory control strategies for continuous process control Logic Developer
Nonlinear Control Lecture
 Nonlinear Control Lecture Just what constitutes nonlinear control? Control systems whose behavior cannot be analyzed by linear control theory. All systems contain some nonlinearities, most are small and
Nonlinear Control Lecture Just what constitutes nonlinear control? Control systems whose behavior cannot be analyzed by linear control theory. All systems contain some nonlinearities, most are small and
When you configure a PID loop in iocontrol, choose one of the following algorithms: Velocity ISA Parallel Interacting
 When you configure a PID loop in iocontrol, choose one of the following algorithms: Velocity ISA Parallel Interacting The ISA, Parallel and Interacting algorithms are functionally equivalent; the only
When you configure a PID loop in iocontrol, choose one of the following algorithms: Velocity ISA Parallel Interacting The ISA, Parallel and Interacting algorithms are functionally equivalent; the only
PALO VERDE NUCLEAR GENERATING STATION
 PALO VERDE NUCLEAR GENERATING STATION Instrumentation & Controls Training Classroom Lesson I&C Program Date: 5/8/2007 LP Number: NIA02L000401 Rev Author: Christopher A. Mahar Title: Loop Control Technical
PALO VERDE NUCLEAR GENERATING STATION Instrumentation & Controls Training Classroom Lesson I&C Program Date: 5/8/2007 LP Number: NIA02L000401 Rev Author: Christopher A. Mahar Title: Loop Control Technical
Simulation of process identification and controller tuning for flow control system
 IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Simulation of process identification and controller tuning for flow control system To cite this article: I M Chew et al 2017 IOP
IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Simulation of process identification and controller tuning for flow control system To cite this article: I M Chew et al 2017 IOP
PROCESS CONTROL LAB. Lab In charge COURSE OBJECTIVES
 PROCESS CONTROL LAB COURSE OBJECTIVES 1. To control temperature, pressure, flow, level using PC with the help of different control modes. 2. To verify the operation of control valves. 3. To verify the
PROCESS CONTROL LAB COURSE OBJECTIVES 1. To control temperature, pressure, flow, level using PC with the help of different control modes. 2. To verify the operation of control valves. 3. To verify the
Figure 1: Unity Feedback System. The transfer function of the PID controller looks like the following:
 Islamic University of Gaza Faculty of Engineering Electrical Engineering department Control Systems Design Lab Eng. Mohammed S. Jouda Eng. Ola M. Skeik Experiment 3 PID Controller Overview This experiment
Islamic University of Gaza Faculty of Engineering Electrical Engineering department Control Systems Design Lab Eng. Mohammed S. Jouda Eng. Ola M. Skeik Experiment 3 PID Controller Overview This experiment
Performance Analysis of Conventional Controllers for Automatic Voltage Regulator (AVR)
") Performance Analysis of Conventional Controllers for Automatic Voltage Regulator (AVR) Ajit Kumar Mittal M.TECH Student, B.I.T SINDRI Dhanbad, India Dr. Pankaj Rai Associate Professor, Department of Electrical
Performance Analysis of Conventional Controllers for Automatic Voltage Regulator (AVR) Ajit Kumar Mittal M.TECH Student, B.I.T SINDRI Dhanbad, India Dr. Pankaj Rai Associate Professor, Department of Electrical
Application Note CTAN #287
 Application Note CTAN #287 This Application Note is pertinent to the Commander SK Water Pressure PID Loop Control This application note will describe a way to utilize the Commander SK (note that the Unidrive
Application Note CTAN #287 This Application Note is pertinent to the Commander SK Water Pressure PID Loop Control This application note will describe a way to utilize the Commander SK (note that the Unidrive
Compensation of Dead Time in PID Controllers
 2006-12-06 Page 1 of 25 Compensation of Dead Time in PID Controllers Advanced Application Note 2006-12-06 Page 2 of 25 Table of Contents: 1 OVERVIEW...3 2 RECOMMENDATIONS...6 3 CONFIGURATION...7 4 TEST
2006-12-06 Page 1 of 25 Compensation of Dead Time in PID Controllers Advanced Application Note 2006-12-06 Page 2 of 25 Table of Contents: 1 OVERVIEW...3 2 RECOMMENDATIONS...6 3 CONFIGURATION...7 4 TEST
Servo Closed Loop Speed Control Transient Characteristics and Disturbances
 Exercise 5 Servo Closed Loop Speed Control Transient Characteristics and Disturbances EXERCISE OBJECTIVE When you have completed this exercise, you will be familiar with the transient behavior of a servo
Exercise 5 Servo Closed Loop Speed Control Transient Characteristics and Disturbances EXERCISE OBJECTIVE When you have completed this exercise, you will be familiar with the transient behavior of a servo
The PID controller. Summary. Introduction to Control Systems
 The PID controller ISTTOK real-time AC 7-10-2010 Summary Introduction to Control Systems PID Controller PID Tuning Discrete-time Implementation The PID controller 2 Introduction to Control Systems Some
The PID controller ISTTOK real-time AC 7-10-2010 Summary Introduction to Control Systems PID Controller PID Tuning Discrete-time Implementation The PID controller 2 Introduction to Control Systems Some
EVALUATION ALGORITHM- BASED ON PID CONTROLLER DESIGN FOR THE UNSTABLE SYSTEMS
 EVALUATION ALGORITHM- BASED ON PID CONTROLLER DESIGN FOR THE UNSTABLE SYSTEMS Erliza Binti Serri 1, Wan Ismail Ibrahim 1 and Mohd Riduwan Ghazali 2 1 Sustanable Energy & Power Electronics Research, FKEE
EVALUATION ALGORITHM- BASED ON PID CONTROLLER DESIGN FOR THE UNSTABLE SYSTEMS Erliza Binti Serri 1, Wan Ismail Ibrahim 1 and Mohd Riduwan Ghazali 2 1 Sustanable Energy & Power Electronics Research, FKEE
Conic Systems Inc. INSTRUCTION MANUAL FOR DATATRAN C2844 PID CONTROLLER WITH FEED FORWARD COMPENSATION
 Conic Systems Inc. INSTRUCTION MANUAL FOR DATATRAN C2844 PID CONTROLLER WITH FEED FORWARD COMPENSATION FOR TECHNICAL OR SALES ASSISTANCE CONTACT CONIC SYSTEMS INC. AT TEL: 845.856.4053 OR FAX: 845.858.2824
Conic Systems Inc. INSTRUCTION MANUAL FOR DATATRAN C2844 PID CONTROLLER WITH FEED FORWARD COMPENSATION FOR TECHNICAL OR SALES ASSISTANCE CONTACT CONIC SYSTEMS INC. AT TEL: 845.856.4053 OR FAX: 845.858.2824
QuickBuilder PID Reference
 QuickBuilder PID Reference Doc. No. 951-530031-006 2010 Control Technology Corp. 25 South Street Hopkinton, MA 01748 Phone: 508.435.9595 Fax: 508.435.2373 Thursday, March 18, 2010 2 QuickBuilder PID Reference
QuickBuilder PID Reference Doc. No. 951-530031-006 2010 Control Technology Corp. 25 South Street Hopkinton, MA 01748 Phone: 508.435.9595 Fax: 508.435.2373 Thursday, March 18, 2010 2 QuickBuilder PID Reference
Determining the Dynamic Characteristics of a Process
 Exercise 5-1 Determining the Dynamic Characteristics of a Process EXERCISE OBJECTIVE In this exercise, you will determine the dynamic characteristics of a process. DISCUSSION OUTLINE The Discussion of
Exercise 5-1 Determining the Dynamic Characteristics of a Process EXERCISE OBJECTIVE In this exercise, you will determine the dynamic characteristics of a process. DISCUSSION OUTLINE The Discussion of
HPVFP High Performance Full Function Vector Frequency Inverter
 Advanced User Manual HPVFP High Performance Full Function Vector Frequency Inverter HP VER 1.00 1. HPVFP Parameter Set Overview...3 1.1. About this section...3 1.2. Parameter Structure Overview...3 1.3.
Advanced User Manual HPVFP High Performance Full Function Vector Frequency Inverter HP VER 1.00 1. HPVFP Parameter Set Overview...3 1.1. About this section...3 1.2. Parameter Structure Overview...3 1.3.
CONTROLLER TUNING FOR NONLINEAR HOPPER PROCESS TANK A REAL TIME ANALYSIS
 Journal of Engineering Science and Technology EURECA 2013 Special Issue August (2014) 59-67 School of Engineering, Taylor s University CONTROLLER TUNING FOR NONLINEAR HOPPER PROCESS TANK A REAL TIME ANALYSIS
Journal of Engineering Science and Technology EURECA 2013 Special Issue August (2014) 59-67 School of Engineering, Taylor s University CONTROLLER TUNING FOR NONLINEAR HOPPER PROCESS TANK A REAL TIME ANALYSIS
Auto-tuning of PID Controller for the Cases Given by Forbes Marshall
 International Journal of Electronics Engineering Research. ISSN 0975-6450 Volume 9, Number 6 (2017) pp. 809-814 Research India Publications http://www.ripublication.com Auto-tuning of PID Controller for
International Journal of Electronics Engineering Research. ISSN 0975-6450 Volume 9, Number 6 (2017) pp. 809-814 Research India Publications http://www.ripublication.com Auto-tuning of PID Controller for
CSE 3215 Embedded Systems Laboratory Lab 5 Digital Control System
 Introduction CSE 3215 Embedded Systems Laboratory Lab 5 Digital Control System The purpose of this lab is to introduce you to digital control systems. The most basic function of a control system is to
Introduction CSE 3215 Embedded Systems Laboratory Lab 5 Digital Control System The purpose of this lab is to introduce you to digital control systems. The most basic function of a control system is to
Determining the Dynamic Characteristics of a Process
 Exercise 1-1 Determining the Dynamic Characteristics of a Process EXERCISE OBJECTIVE Familiarize yourself with three methods to determine the dynamic characteristics of a process. DISCUSSION OUTLINE The
Exercise 1-1 Determining the Dynamic Characteristics of a Process EXERCISE OBJECTIVE Familiarize yourself with three methods to determine the dynamic characteristics of a process. DISCUSSION OUTLINE The
Tuning interacting PID loops. The end of an era for the trial and error approach
 Tuning interacting PID loops The end of an era for the trial and error approach Introduction Almost all actuators and instruments in the industry that are part of a control system are controlled by a PI(D)
Tuning interacting PID loops The end of an era for the trial and error approach Introduction Almost all actuators and instruments in the industry that are part of a control system are controlled by a PI(D)
Modified ultimate cycle method relay auto-tuning
 Adaptive Control - Autotuning Structure of presentation: Relay feedback autotuning outline Relay feedback autotuning details How close is the estimate of the ultimate gain and period to the actual ultimate
Adaptive Control - Autotuning Structure of presentation: Relay feedback autotuning outline Relay feedback autotuning details How close is the estimate of the ultimate gain and period to the actual ultimate
Design of an Intelligent Pressure Control System Based on the Fuzzy Self-tuning PID Controller
 Design of an Intelligent Pressure Control System Based on the Fuzzy Self-tuning PID Controller 1 Deepa S. Bhandare, 2 N. R.Kulkarni 1,2 Department of Electrical Engineering, Modern College of Engineering,
Design of an Intelligent Pressure Control System Based on the Fuzzy Self-tuning PID Controller 1 Deepa S. Bhandare, 2 N. R.Kulkarni 1,2 Department of Electrical Engineering, Modern College of Engineering,
Application sheet for Green 300 series controllers. Title. Purpose. Application Controller Loop Configuration: Wiring: Explanation :
 Furnace temperature control with Solid State Relay(SSR) AP35001 Control a furnace temperature by using UT350 temperature controller. Model UT350 can drive SSR as an actuator directly. Electrical Furnace
Furnace temperature control with Solid State Relay(SSR) AP35001 Control a furnace temperature by using UT350 temperature controller. Model UT350 can drive SSR as an actuator directly. Electrical Furnace
COMPARISON OF TUNING METHODS OF PID CONTROLLER USING VARIOUS TUNING TECHNIQUES WITH GENETIC ALGORITHM
 JOURNAL OF ELECTRICAL ENGINEERING & TECHNOLOGY Journal of Electrical Engineering & Technology (JEET) (JEET) ISSN 2347-422X (Print), ISSN JEET I A E M E ISSN 2347-422X (Print) ISSN 2347-4238 (Online) Volume
JOURNAL OF ELECTRICAL ENGINEERING & TECHNOLOGY Journal of Electrical Engineering & Technology (JEET) (JEET) ISSN 2347-422X (Print), ISSN JEET I A E M E ISSN 2347-422X (Print) ISSN 2347-4238 (Online) Volume
SECTION 6: ROOT LOCUS DESIGN
 SECTION 6: ROOT LOCUS DESIGN MAE 4421 Control of Aerospace & Mechanical Systems 2 Introduction Introduction 3 Consider the following unity feedback system 3 433 Assume A proportional controller Design
SECTION 6: ROOT LOCUS DESIGN MAE 4421 Control of Aerospace & Mechanical Systems 2 Introduction Introduction 3 Consider the following unity feedback system 3 433 Assume A proportional controller Design
CHAPTER 4 AN EFFICIENT ANFIS BASED SELF TUNING OF PI CONTROLLER FOR CURRENT HARMONIC MITIGATION
 92 CHAPTER 4 AN EFFICIENT ANFIS BASED SELF TUNING OF PI CONTROLLER FOR CURRENT HARMONIC MITIGATION 4.1 OVERVIEW OF PI CONTROLLER Proportional Integral (PI) controllers have been developed due to the unique
92 CHAPTER 4 AN EFFICIENT ANFIS BASED SELF TUNING OF PI CONTROLLER FOR CURRENT HARMONIC MITIGATION 4.1 OVERVIEW OF PI CONTROLLER Proportional Integral (PI) controllers have been developed due to the unique
PYKC 7 March 2019 EA2.3 Electronics 2 Lecture 18-1
 In this lecture, we will examine a very popular feedback controller known as the proportional-integral-derivative (PID) control method. This type of controller is widely used in industry, does not require
In this lecture, we will examine a very popular feedback controller known as the proportional-integral-derivative (PID) control method. This type of controller is widely used in industry, does not require
AN EXPERIMENTAL INVESTIGATION OF THE PERFORMANCE OF A PID CONTROLLED VOLTAGE STABILIZER
 AN EXPERIMENTAL INVESTIGATION OF THE PERFORMANCE OF A PID CONTROLLED VOLTAGE STABILIZER J. A. Oyedepo Department of Computer Engineering, Kaduna Polytechnic, Kaduna Yahaya Hamisu Abubakar Electrical and
AN EXPERIMENTAL INVESTIGATION OF THE PERFORMANCE OF A PID CONTROLLED VOLTAGE STABILIZER J. A. Oyedepo Department of Computer Engineering, Kaduna Polytechnic, Kaduna Yahaya Hamisu Abubakar Electrical and
TI25 - Pre-Instructional Survey
 TI25 - Pre-Instructional Survey Name: Date: 1. Scheduled maintenance that is planned, with materials on hand, personnel on site, and production planning advised is called maintenance. a. predictive b.
TI25 - Pre-Instructional Survey Name: Date: 1. Scheduled maintenance that is planned, with materials on hand, personnel on site, and production planning advised is called maintenance. a. predictive b.
6545(Print), ISSN (Online) Volume 4, Issue 1, January- February (2013), IAEME & TECHNOLOGY (IJEET)
, ISSN (Online) Volume 4, Issue 1, January- February (2013), IAEME & TECHNOLOGY (IJEET)") INTERNATIONAL International Journal of JOURNAL Electrical Engineering OF ELECTRICAL and Technology (IJEET), ENGINEERING ISSN 0976 & TECHNOLOGY (IJEET) ISSN 0976 6545(Print) ISSN 0976 6553(Online) Volume
INTERNATIONAL International Journal of JOURNAL Electrical Engineering OF ELECTRICAL and Technology (IJEET), ENGINEERING ISSN 0976 & TECHNOLOGY (IJEET) ISSN 0976 6545(Print) ISSN 0976 6553(Online) Volume
BIDIRECTIONAL SOFT-SWITCHING SERIES AC-LINK INVERTER WITH PI CONTROLLER
 BIDIRECTIONAL SOFT-SWITCHING SERIES AC-LINK INVERTER WITH PI CONTROLLER PUTTA SABARINATH M.Tech (PE&D) K.O.R.M Engineering College, Kadapa Affiliated to JNTUA, Anantapur. ABSTRACT This paper proposes a
BIDIRECTIONAL SOFT-SWITCHING SERIES AC-LINK INVERTER WITH PI CONTROLLER PUTTA SABARINATH M.Tech (PE&D) K.O.R.M Engineering College, Kadapa Affiliated to JNTUA, Anantapur. ABSTRACT This paper proposes a
A Real-Time Regulator, Turbine and Alternator Test Bench for Ensuring Generators Under Test Contribute to Whole System Stability
 A Real-Time Regulator, Turbine and Alternator Test Bench for Ensuring Generators Under Test Contribute to Whole System Stability Marc Langevin, eng., Ph.D.*. Marc Soullière, tech.** Jean Bélanger, eng.***
A Real-Time Regulator, Turbine and Alternator Test Bench for Ensuring Generators Under Test Contribute to Whole System Stability Marc Langevin, eng., Ph.D.*. Marc Soullière, tech.** Jean Bélanger, eng.***
12. ELECTRONICS & INSTRUMENTATION FOR TEMPERATURE
 12. ELECTRONICS & INSTRUMENTATION FOR TEMPERATURE 12.1 INTRODUCTION The range requirement in instrumentation ranges from a simple display of a single temperature value to multi sensor data acquisition
12. ELECTRONICS & INSTRUMENTATION FOR TEMPERATURE 12.1 INTRODUCTION The range requirement in instrumentation ranges from a simple display of a single temperature value to multi sensor data acquisition
Relay Feedback based PID Controller for Nonlinear Process
 Relay Feedback based PID Controller for Nonlinear Process I.Thirunavukkarasu, Dr.V.I.George, * and R.Satheeshbabu Abstract This work is about designing a relay feedback based PID controller for a conical
Relay Feedback based PID Controller for Nonlinear Process I.Thirunavukkarasu, Dr.V.I.George, * and R.Satheeshbabu Abstract This work is about designing a relay feedback based PID controller for a conical
Think About Control Fundamentals Training. Terminology Control. Eko Harsono Control Fundamental
 Think About Control Fundamentals Training Terminology Control Eko Harsono eko.harsononus@gmail.com; 1 Contents Topics: Slide No: Process Control Terminology 3-10 Control Principles 11-18 Basic Control
Think About Control Fundamentals Training Terminology Control Eko Harsono eko.harsononus@gmail.com; 1 Contents Topics: Slide No: Process Control Terminology 3-10 Control Principles 11-18 Basic Control
Proportional pressure controller
 Proportional pressure controller Introduction I. Introducing : Proportional Pressure Controller Input signal I or E Output pressure The MAC Proportional Pressure Controller, (PPC) is an innovative product
Proportional pressure controller Introduction I. Introducing : Proportional Pressure Controller Input signal I or E Output pressure The MAC Proportional Pressure Controller, (PPC) is an innovative product