THE INFUSION OF MCS KALMAN FILTER DATA INTO GPS BLOCK II/IIA FREQUENCY STANDARD ANALYSIS TECHNIQUES
|
|
|
- Laurence Parker
- 6 years ago
- Views:
Transcription
 567-3176, (719) 567-2943, (719) 567-5953 E-mail:")
1 32nd Annual Precise Time and Time Interval (PTTI) Meeting THE INFUSION OF MCS KALMAN FILTER DATA INTO GPS BLOCK II/IIA FREQUENCY STANDARD ANALYSIS TECHNIQUES Gary L. Dieter, Gregory E. Hatten, and Jack Taylor Boeing Space and Communication Services 440 Discover Avenue, Suite 38 Schriever Air Force Base, CO , USA Tel: (719) , (719) , (719) Gary. L. corn, Gregory. E. HattenQBoeing. corn, Jack. corn Abstract Recent advances have ahwed Boeing GPS navigation payload analysts the ability to transfer, archive, and manipulate Master Control Station (MCS) Kalman filter data. Previously, access to these data was cumbersome and restricted to a limited timespan. The new data retrieval process has proven to be useful in many areas of GPS analysis, including frequency standard performance characterization. Both routine and anomolous frequency standard performance analysis techniques are enhanced by considering the characteristics and trends of key MCS filter variables. This paper describes the methodology by which the MCS Kalman filter data is attained. It also examines situations in which MCS Kalman filter clock state estimates and navigation performance metrics have proven to be useful in analyzing frequency standard performance. Examples include routine examination of frequency standard stability using MCS phase ofiet estimates, analysis of MCS frequency oset estimates before and after a clock q-bump, and comparison of MCS clock state estimates versus those of the National lmagery and Mapping Agency (NZMA). Conclusions reveal that new, valuable insight is gained by considering MCS Kalman filter data when petforming frequency standard analysis. ~- _ ~ MCS KALMAN FILTER DATA TRANSFER METHODOLOGY Until the summer of 1999, analysis of GPS Kalman filter data was limited to on-line tools. Because of security constraints and the awkwardness of the Jovial-based architecture, the ability to move data off-line and employ COTS analysis tools was labor-intensive and, in practice, rarely done. Instead, most analysis was done on-line and in real-time. The on-line tools are relatively effective in spotting and analyzing anomalies as they occur, but any additional analysis often has to be performed by outside agencies. Beginning in the summer of 1999, Boeing personnel working at the MCS began retrieving selected MCS data from the on-line system and archiving it off-line. This method of archiving data allowed much greater flexibility for analysis. COTS tools such as Stable32 and MS Excel could be used to analyze and graphically display the data. Also, time spans are limited only by the beginning of this archive. Many on-line tools are restricted to accessing data from the last hours. Even MCS tapes-containing stored data are erased within 6 months. The data retrieval activity is a three-step process. First, one or more batch scripts are run on the standby mission package. The standby mission package is identical to the active mission package, and is kept in a 117
2 state of readiness in case there is a need to switch-over. The batch jobs are run on the standby package to prevent any slow-downs of the various processes required to run the MCS mission package. Once the batch jobs have created the files containing the various GPS performance data, the files are transferred to a classified PC. This is a relatively slow process; 1 day's worth of data takes approximately one hour to transfer. Once the files are on the classified PC, they are transferred to a zip drive by secure means. Finally, the files on the zip disk are moved to an unclassified PC and archived on the Schriever AFB LAN. This rather tedious, labor-intensive process is performed-every weekday to ensure that the archives have the most up-to-date information available. The information is in ASCII format and can be read by most COTS analysis tools. Clearly, the process would be improved by automation. Boeing personnel, in conjunction with the Air Force and other GPS contractors, are trying to streamline the process. Several issues remain to be addressed. Security is a major issue. Several aspects of the GPS mission package are classified. Any scheme to remove data (even unclassified data) from a classified system requires extensive security reviews. Several means of removing the data from the system have been rejected for security reasons. Our ultimate goal is to have the additional MCS data automatically downloaded to the Integrated Mission Operations Support Center (IMOSC) terminals, where an ensemble of Windows-based analysis tools will reside. The advanced age and complexity of the MCS Legacy system is another difficult issue. The Air Force is trying to move MCS operations to a newer, more advanced system. This makes it very difficult to commit resources to upgrading the older, Legacy system. Although the new system is not expected to be delivered for several years, few MCS Operational Control System (OCS) resources are devoted to the outgoing Legacy system. Despite these challenges, the authors believe that the data retrieval and archival process can be streamlined and that this valuable effort will continue. Currently, 18 files are transferred on a daily basis. This list of files contains the following data: Kalman state estimates (including backup and KF maintenance activities); reference trajectory data and coordinate system (ECI-ECEF) transformation data; GPS-UTC steering activity; smoothed measkrements and residuals; navigation message upload data; and performance monitoring data (Estimated Range Deviations (ERDs), Observed Range Deviations (ORDs); and navigation solution (NAVSOL) data). ROUTINE DATA ANALYSIS Transferred MCS data, along with downloaded NIMA ephemeris and clock data, and published Notice Advisories to NAVSTAR Users (NANUS), are combined to generate 3 groups of periodic reports: weekly, monthly, and quarterly. The weekly report consists of an upload count plot (see Figure l), which shows the number of navigation uploads transmitted to each SV over the previous week. A health scan is also done, and only those uploads transmitted while the SV was healthy are counted. This report grew out of a contingency upload list which formerly was manually transcribed from crew Payload Systems Operator (PSO) log records. Reasons for excessive uploads are listed on the chart. Typical reasons or additional uploads include AFS instability, momentum dumps,and eclipse season operations. I Weekly ERD plots (see Figure 2) are used to investigate reasons for extra uploads. These charts are compiled weekly, but not distributed due to their large file size. ' 118
 lists an average daily RMS value for the constellation (both with and without GPS IIR SVs included), along with a monthly average daily RMS summary by SV.")
3 Monthly reports include a constellation ERD summary, an upload count summary, an upload aging summary, and a NIMA vs. MCS clock stability comparison chart. The ERD summary chart (Figure 3) lists an average daily RMS value for the constellation (both with and without GPS IIR SVs included), along with a monthly average daily RMS summary by SV. Finally, notes describe the poorest and best performers in the GPS constellation. The monthly upload summary (Figure 4) shows the average number of uploads per day (while SVs are healthy) for the entire constellation for the past 6 months. Also included in this report are the daily upload statistics for each SV for the current and previous months. A table at the bottom lists SV outages. Monthly upload aging plots (Figure 5) are compiled each month for each SV over a two-week and 60-day duration for the period!2( months prior to the current month. In these reports, every upload built for each SV for the month is reconstructed and compared to NIMA precise ephemeris and clock data. Mean uploads for each SV are plotted. Over 6,000,000 data points are processed each month to generate the upload aging report. [ 11 The NIMA vs. MCS comparison report is also accomplished on a monthly basis. This report compares the stability (Hadamard deviation) of the MCS Kalman clock phase estimates with the phase estimates derived through NIMA post-processing. This check is accomplished on a Windows-PC platform using Stable32 developed Hamilton Technical Services. Three examples are discussed in more detail in the next section. In addition to weekly and monthly reports, the quarterly reports contain a 90-day ERD summary for each SV (average and RMS daily statistics), and an overall ERD summary (see Figures 6 & 7). RESULTS OF DATA ANALYSIS NIMA Vs. Kalman Comparison Figure 8 is an example of a "good" stability comparison between NIMA and MCS Kalman data. In this case, the Hadamard deviation plots line up on top of each other for z > 2000s. For z < 2000s, there is some divergence, but as this occurs for every satellite in the GPS constellation, it is assumed that this is due to processing differences between the MCS and NIMA. Figure 9 is an example of a "poor" comparison between. NIMA and MCS Kalman data. In this case, the phase data supplied by the MCS Kalman filter indicates a more stable clock than NIMA's phase data. This is due to the process noise values (Qs) that are specific to that particular clock. As a clock's characteristics change over time, the process noise values are periodically updated. Since new process noise values are derived approximately once per quarter, it is possible that a frequency standard's current performance characteristics can be different than the performance characteristics as measured several months ago. Figure 10 is an example of intentional clock-ephemeris "cross corruption" of MCS Kalman filter states. In this case, the fiequency standard has known, time-dependent, periodic behavior. Since the MCS Kalman filter can not model periodic behavior in the clock states, the process noise values (Qs) are set artificially tight. In this manner, periodic behavior in the clock states is transferred to the ephemeris states. Although this results in the separate ephemeris and clock states being modeled improperly, the combination results in a more accurate navigation solution. 119
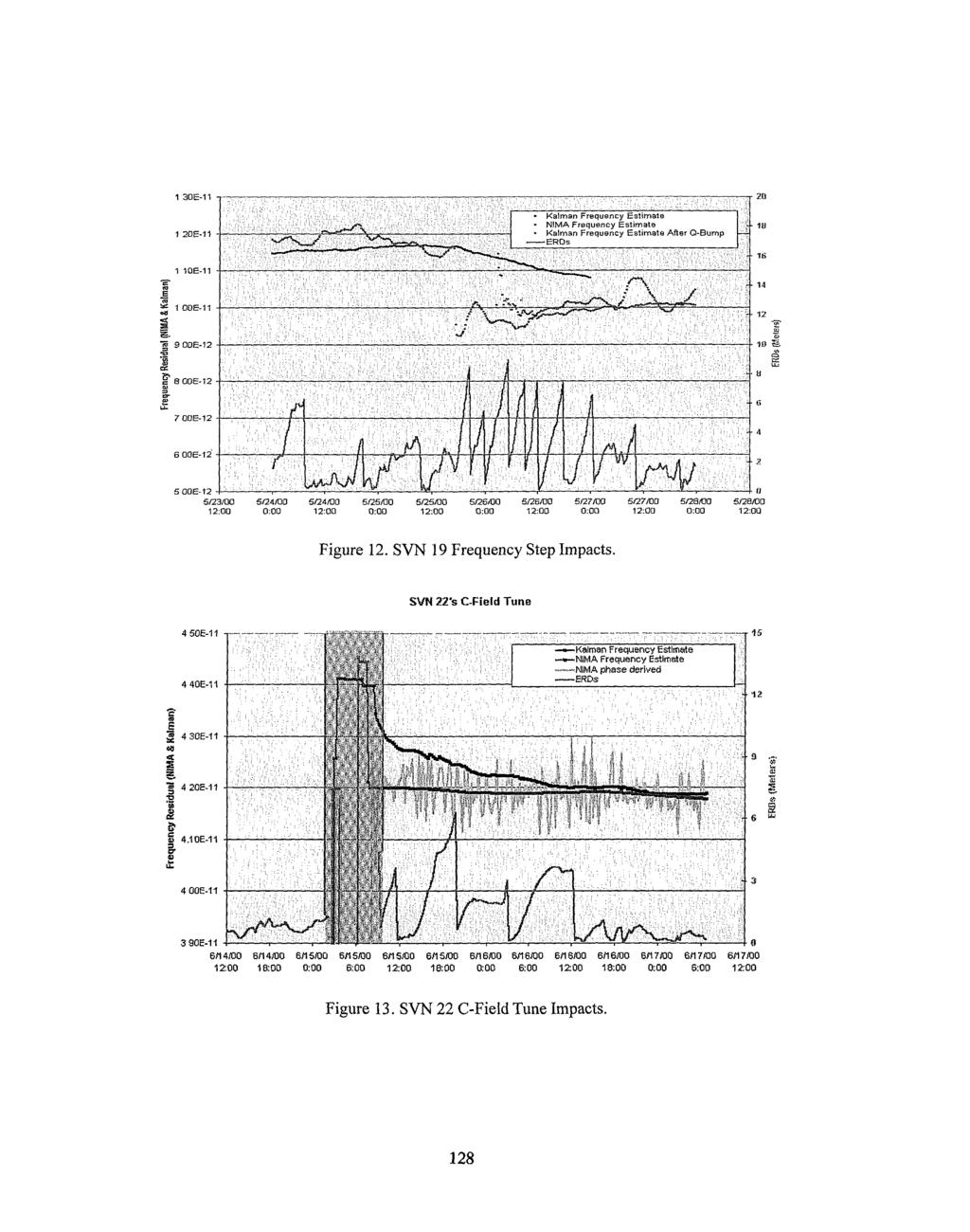
4 SVN 19 Frequency Step Analysis On May 25, 2000, SVN 19's Cesium Frequency Standard #3 experienced a frequency offset shift of approximately 2E-12 s/s. Frequency jumps, although not common, are on-orbit anomalies that 2 SOPS operators expect from time to time. Although there is nothing that 2 SOPS can do from a hardware perspective to minimize the effect of.such perturbations, proper MCS Kalman filter maintenance can ensure a minimal impact on navigation signal accuracy, as well as on the MCS crew workload. Each satellite's process noise values (Q's) are optimited for day-to-day operations, and do not take anomalous behavior such as frequency steps into consideration. In the case just described, it is the job of 2 SOPS analysts to adjust the filter to allow for the frequency step. This is accomplished by reinitializing the clock process noise to a database value. This procedure is known as a clock "Q-bump!' The transferred Kalman data, along with a set of "truth" data (in this case post-processed NIMA data), provides valuable insight into this anomaly, its effects, and the 2 SOPS corrective action taken. Figure 11 shows a plot of the phase-derived NIMA frequency offset estimates for SVN 19 during the timeframe of the frequency step. As seen in the figure, the frequency offset shifted at approximately 18:OO 2 on 5/25/00. Also seen in this figure is the MCS Kalman filter frequency offset estimate before any filter maintenance was performed (Pre-Q-Bump). It is seen that the MCS filter frequency offset estimate did not react instantaneously to the frequency step (as discussed, the filter is designed for prediction purposes, and nominally does not expect a sudden shift in frequency). Once MCS operators observed the problem, a clock state Q-bump was performed. The figure shows how the filter adjusted its frequency offset estimate to fall in line with what actually occurred on the spacecraft. Figure 12 shows not only the NIMA (non-phase-derived, in this case) and MCS frequency offset estimates, but also how the MCS mismodeling affected the navigation signal. It is clearly seen that SVN 19's navigation signal accuracy was degraded during the period of misestimation, and the MCS crews were kept busy re-uploading the navigation message. (New uploads appear as downward spikes in ERD data.) However, it is also seen that once the clock Q-bump was perfofed and the spacecraft was uploaded with an adjusted navigation message, the ERD runoff was much less severe, and eventually performance returned to normal. This careful post-anomaly analysis allows us to refine operational recommendations and procedures to minimize navigation signal accuracy and GPS crew impacts. SVN 22 C-Field Tune Analysis The current operational method of changing a GPS frequency standard's output frequency is to tune its C- field. After a C-field tune is commanded, the previous MCS Kalman filter estimate of the clock frequency is incorrect, and a ranging error runoff will occur. To correct this error, 2 SOPS operators use navigation signal data collected at the MCS monitor stations to calculate the new clock frequency and update the Kalman filter's state estimates. Figure 13 shows data from a C-field tune which occured on SVN 22's Rubidium Frequency Standard #I on 6/15/00. As is typical in the case of a C-field tune, the spacecraft was set unhealthy to users (this timeframe can be seen as the shaded area in the figure). In this case, one can observe from comparing NIMA frequency offset estimates to MCS Kalman filter estimates that the MCS estimate was not optimal at the conclusion of the C-field tune and associated filter maintenance. Although the MCS estimate was close enough that the spacecraft could be set healthy, several additional navigation message updates were necessary during the first couple days following the event. ERD levels did not stay consistently low until the MCS estimate caught up with the actual frequency offset. 120
5 CONCLUSION The ability to transfer Kalman filter data from the MCS to an offline system has proven to be extremely valuable to Boeing navigation payload analysts. This capability has provided insight into many aspects of GPS navigation payload analysis, in cluding frequency standard trending and anomaly resolution. Although the transfer process is currently fairly cumbersome, plans for the future include an emphasis on ease of use and automation. It is hoped that the continued utilization and refinement of this data transfer process will assist Boeing in not only improving frequency standard analysis techniques, but in continuing to provide 2 SOPS and the user community the best overall GPS support possible. ACKNOWLEDGMENTS The authors would like to gratefully thank the following individuals and organizations for their assistance with this paper and for their contributions to the GPS Program: Dr. John Berg, The Aerospace Corporation The Boeing GPS Operations Team at Schriever AFB, CO The Men and Women of 2 SOPS REFERENCES [I] G. E. Hatten, and J. V. Taylor Navigation Upload Performance, Proceedings of ION GPS-00, September

6 Weekly Upload Count for Week 40, Figure 1. Weekly Upload Count Chart. SVNll ERD Performance DOY Figure 2. Weekly ERD Performance Chart (SVN15). 122

7 Figure 3. Monthly Navigation Performance Chart. 123
8 SVNl /09/ % Delta-V SVN26 08M MO 11' % Delta-V SVN29 08f n % IPO wm6 Reset SVN M Initial Operational Capability Elk IllllA Availability: 99.91% $I] Constellation Availability: 99.92% ('2) *I - SVNIS excluded from availabilily statistics; offline since July; awaiting disposal. 7 - SVN44 only counted since 22:33). Figure 4. Monthly Upload Count Chart. 124
9 NOTES: SVN16 Upload June 2000 UREs varied at 15 days from below 75 meters to over 1500 meters. SVN18 was decommissioned during June Bad upload data from SVN32 was edited out. 125


10 _l_- Block IllllA Constellatlon RMS ERD Performance -- 2d Quarter Monthly RMS All Block IIIIIA Constellation RMS =I 840 rn Entire Constellation RMS -1,599 m Figure 7. Quarterly ERD Constellation Performance Chart. SVN33 07/2000 Frequency Stability I E+02 1 E+03 1 E+04 1 E+05 1 E+06 Seconds Figure 8. Example of good NIMA vs. MCS stability comparison. 126

11 SVN Frequency Stability 1 Figure 9. Example of poor NIMA vs. MCS stability comparison. SVN Frequency Stability 1 E-12,s 1 E-13 H 1 E-14 I E+02 1 E103 1 E104 1 E105 seconds Figure 10. Example of MCS cross-corruption. 190E-11 -* I 1 7OE-11 3 i5oe-11 Q 6 130E-11? i1oe-i1 U t U 9 00E E E-12 5/24/00:W 5/24/001Z:W 5/25/00 0:W 5/25/00 12:Mi 5/28/00 0.W 5/28/0012:W 5/27/00 0:W 5/27/0012:OO 5/28/000:W Time Figure 1 1. NIMA & MCS S W 19 Frequency Offset Estimates. 127
12
GPS Accuracy versus Number of NIMA Stations
 GPS Accuracy versus Number of NIMA Stations C. H. Yinger, W. A. Feess, V. Nuth, R.N. Haddad, The Aerospace Corporation BIOGRAPHIES Colleen H. Yinger is a Senior Engineering Specialist in the Navigation
GPS Accuracy versus Number of NIMA Stations C. H. Yinger, W. A. Feess, V. Nuth, R.N. Haddad, The Aerospace Corporation BIOGRAPHIES Colleen H. Yinger is a Senior Engineering Specialist in the Navigation
EVALUATION OF GPS BLOCK IIR TIME KEEPING SYSTEM FOR INTEGRITY MONITORING
 EVALUATION OF GPS BLOCK IIR TIME KEEPING SYSTEM FOR INTEGRITY MONITORING Dr. Andy Wu The Aerospace Corporation 2350 E El Segundo Blvd. M5/689 El Segundo, CA 90245-4691 E-mail: c.wu@aero.org Abstract Onboard
EVALUATION OF GPS BLOCK IIR TIME KEEPING SYSTEM FOR INTEGRITY MONITORING Dr. Andy Wu The Aerospace Corporation 2350 E El Segundo Blvd. M5/689 El Segundo, CA 90245-4691 E-mail: c.wu@aero.org Abstract Onboard
MANAGEMENT OF PHASE AND FREQUENCY FOR GPS IIR SATELLITES
 33rdAnnual Precise Time and Time lnterval (PTTI)Meeting MANAGEMENT OF PHASE AND FREQUENCY FOR GPS IIR SATELLITES Dr. Marvin Epstein and Mr. Todd Dass ITT Industries Aerospace, Communications Division 100
33rdAnnual Precise Time and Time lnterval (PTTI)Meeting MANAGEMENT OF PHASE AND FREQUENCY FOR GPS IIR SATELLITES Dr. Marvin Epstein and Mr. Todd Dass ITT Industries Aerospace, Communications Division 100
GPS BLOCK IIF ATOMIC FREQUENCY STANDARD ANALYSIS
 GPS BLOCK IIF ATOMIC FREQUENCY STANDARD ANALYSIS Francine Vannicola, Ronald Beard, Joseph White, Kenneth Senior U.S. Naval Research Laboratory 4555 Overlook Avenue, SW, Washington, DC 20375, USA francine.vannicola@nrl.navy.mil
GPS BLOCK IIF ATOMIC FREQUENCY STANDARD ANALYSIS Francine Vannicola, Ronald Beard, Joseph White, Kenneth Senior U.S. Naval Research Laboratory 4555 Overlook Avenue, SW, Washington, DC 20375, USA francine.vannicola@nrl.navy.mil
OBSERVATIONS ON THE RELIABILITY OF RUBIDIUM FREQUENCY STANDARDS ON BLOCK II/IIA GPS SATELLITES
 OBSERVATIONS ON THE RELIABILITY OF RUBIDIUM FREQUENCY STANDARDS ON BLOCK II/IIA GPS SATELLITES 1Lt. Gary L. Dieter Capt. Gregory E. Hatten US Air Force, Falcon AFB, Colorado Springs, CO 80912 Abstract
OBSERVATIONS ON THE RELIABILITY OF RUBIDIUM FREQUENCY STANDARDS ON BLOCK II/IIA GPS SATELLITES 1Lt. Gary L. Dieter Capt. Gregory E. Hatten US Air Force, Falcon AFB, Colorado Springs, CO 80912 Abstract
GPS CLOCKS IN SPACE: CURRENT PERFORMANCE AND PLANS FOR THE FUTURE
 3 th Annual Precise Time and Time Interval (PTTI) Meeting GPS CLOCKS IN SPACE: CURRENT PERFORMANCE AND PLANS FOR THE FUTURE Mr. Todd Dass, Mr. Gerald Freed, Mr. John Petzinger, Dr. John Rajan ITT Industries
3 th Annual Precise Time and Time Interval (PTTI) Meeting GPS CLOCKS IN SPACE: CURRENT PERFORMANCE AND PLANS FOR THE FUTURE Mr. Todd Dass, Mr. Gerald Freed, Mr. John Petzinger, Dr. John Rajan ITT Industries
ANALYSIS OF ON-ORBIT BEHAVIOR OF GPS BLOCK 11-R TIME KEEPING SYSTEM
 ANALYSS OF ON-ORBT BEHAVOR OF GPS BLOCK 11-R TME KEEPNG SYSTEM Todd Dass, John Petzinger, John Rajan, Harris Rawicz TT ndustries Aerospace/Communications Division 100 Kingsland Rd Clifton, NJ 070 14-1993
ANALYSS OF ON-ORBT BEHAVOR OF GPS BLOCK 11-R TME KEEPNG SYSTEM Todd Dass, John Petzinger, John Rajan, Harris Rawicz TT ndustries Aerospace/Communications Division 100 Kingsland Rd Clifton, NJ 070 14-1993
GPS Civil Interface Observations. Rick Hamilton CGSIC Executive Secretariat U.S. Coast Guard Navigation Center
 GPS Civil Interface Observations Rick Hamilton CGSIC Executive Secretariat U.S. Coast Guard Navigation Center ICD Compliance Issues Provide non attribution forum to Inform the users community of recent
GPS Civil Interface Observations Rick Hamilton CGSIC Executive Secretariat U.S. Coast Guard Navigation Center ICD Compliance Issues Provide non attribution forum to Inform the users community of recent
ENHANCEMENTS TO THE GPS BLOCK IIR TIMEKEEPING SYSTEM
 ENHANCEMENTS TO THE GPS BLOCK IIR TIMEKEEPING SYSTEM Mr. John Petzinger, Mr. Randall Reith, and Mr. Todd Dass ITT Industries Aerospace/Communications Division, NJ Technology Center Clifton, NJ 07014-1993,
ENHANCEMENTS TO THE GPS BLOCK IIR TIMEKEEPING SYSTEM Mr. John Petzinger, Mr. Randall Reith, and Mr. Todd Dass ITT Industries Aerospace/Communications Division, NJ Technology Center Clifton, NJ 07014-1993,
NGA GPS Monitor Station High-Performance Cesium Frequency Standard Stability: From NGA Kalman Filter Clock Estimates
 NGA GPS Monitor Station High-Performance Cesium Frequency Standard Stability: From NGA Kalman Filter Clock Estimates Dennis M. Manning National Geospatial-Intelligence Agency GPS Branch/L-22, 3838 Vogel
NGA GPS Monitor Station High-Performance Cesium Frequency Standard Stability: From NGA Kalman Filter Clock Estimates Dennis M. Manning National Geospatial-Intelligence Agency GPS Branch/L-22, 3838 Vogel
Global Positioning Systems Directorate
 Space and Missile Systems Center Global Positioning Systems Directorate GPS Program Update to 8 th Stanford PNT Symposium 30 Oct 2014 Col Matt Smitham Deputy Director, GPS Directorate Global Positioning
Space and Missile Systems Center Global Positioning Systems Directorate GPS Program Update to 8 th Stanford PNT Symposium 30 Oct 2014 Col Matt Smitham Deputy Director, GPS Directorate Global Positioning
ONE-WAY GPS TIME TRANSFER 2000
 32nd Annual Precise Time and Time Interval (PTTI) Meeting ONE-WAY GPS TIME TRANSFER 2000 A1 Gifford National Institute of Standards and Technology 325 Broadway, Boulder, CO 80303, USA Scott Pace Rand Corporation
32nd Annual Precise Time and Time Interval (PTTI) Meeting ONE-WAY GPS TIME TRANSFER 2000 A1 Gifford National Institute of Standards and Technology 325 Broadway, Boulder, CO 80303, USA Scott Pace Rand Corporation
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE APRIL TO JUNE 2017 QUARTERLY REPORT
 PERFORMANCE APRIL TO JUNE 2017 QUARTERLY REPORT") GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE APRIL TO JUNE 2017 QUARTERLY REPORT Name Responsibility Date Signature Prepared by M Pattinson (NSL) 06/07/17 Checked by L Banfield (NSL) 06/07/17 Authorised
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE APRIL TO JUNE 2017 QUARTERLY REPORT Name Responsibility Date Signature Prepared by M Pattinson (NSL) 06/07/17 Checked by L Banfield (NSL) 06/07/17 Authorised
t =1 Transmitter #2 Figure 1-1 One Way Ranging Schematic
 1.0 Introduction OpenSource GPS is open source software that runs a GPS receiver based on the Zarlink GP2015 / GP2021 front end and digital processing chipset. It is a fully functional GPS receiver which
1.0 Introduction OpenSource GPS is open source software that runs a GPS receiver based on the Zarlink GP2015 / GP2021 front end and digital processing chipset. It is a fully functional GPS receiver which
Basics of Satellite Navigation an Elementary Introduction Prof. Dr. Bernhard Hofmann-Wellenhof Graz, University of Technology, Austria
 Basics of Satellite Navigation an Elementary Introduction Prof. Dr. Bernhard Hofmann-Wellenhof Graz, University of Technology, Austria CONCEPT OF GPS Prof. Dr. Bernhard Hofmann-Wellenhof Graz, University
Basics of Satellite Navigation an Elementary Introduction Prof. Dr. Bernhard Hofmann-Wellenhof Graz, University of Technology, Austria CONCEPT OF GPS Prof. Dr. Bernhard Hofmann-Wellenhof Graz, University
Worst-Case GPS Constellation for Testing Navigation at Geosynchronous Orbit for GOES-R
 Worst-Case GPS Constellation for Testing Navigation at Geosynchronous Orbit for GOES-R Kristin Larson, Dave Gaylor, and Stephen Winkler Emergent Space Technologies and Lockheed Martin Space Systems 36
Worst-Case GPS Constellation for Testing Navigation at Geosynchronous Orbit for GOES-R Kristin Larson, Dave Gaylor, and Stephen Winkler Emergent Space Technologies and Lockheed Martin Space Systems 36
GPS Modernization and Program Update
 GPS Modernization and Program Update GPS Update to ION Southern California Chapter 22 Feb 2011 Colonel Bernie Gruber Director Global Positioning Systems Directorate Contents Current Constellation Modernization
GPS Modernization and Program Update GPS Update to ION Southern California Chapter 22 Feb 2011 Colonel Bernie Gruber Director Global Positioning Systems Directorate Contents Current Constellation Modernization
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE OCTOBER TO DECEMBER 2013 QUARTERLY REPORT. GPS Performance 08/01/14 08/01/14 08/01/14.
 PERFORMANCE OCTOBER TO DECEMBER 2013 QUARTERLY REPORT. GPS Performance 08/01/14 08/01/14 08/01/14.") GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE OCTOBER TO DECEMBER 2013 QUARTERLY REPORT Prepared by: M Pattinson (NSL) 08/01/14 Checked by: L Banfield (NSL) 08/01/14 Approved by: M Dumville (NSL) 08/01/14
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE OCTOBER TO DECEMBER 2013 QUARTERLY REPORT Prepared by: M Pattinson (NSL) 08/01/14 Checked by: L Banfield (NSL) 08/01/14 Approved by: M Dumville (NSL) 08/01/14
SIMPLE METHODS FOR THE ESTIMATION OF THE SHORT-TERM STABILITY OF GNSS ON-BOARD CLOCKS
 SIMPLE METHODS FOR THE ESTIMATION OF THE SHORT-TERM STABILITY OF GNSS ON-BOARD CLOCKS Jérôme Delporte, Cyrille Boulanger, and Flavien Mercier CNES, French Space Agency 18, avenue Edouard Belin, 31401 Toulouse
SIMPLE METHODS FOR THE ESTIMATION OF THE SHORT-TERM STABILITY OF GNSS ON-BOARD CLOCKS Jérôme Delporte, Cyrille Boulanger, and Flavien Mercier CNES, French Space Agency 18, avenue Edouard Belin, 31401 Toulouse
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE JANUARY TO MARCH 2017 QUARTERLY REPORT
 PERFORMANCE JANUARY TO MARCH 2017 QUARTERLY REPORT") GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE JANUARY TO MARCH 2017 QUARTERLY REPORT Name Responsibility Date Signature Prepared by M Pattinson (NSL) 11/04/17 Checked by L Banfield (NSL) 11/04/17 Authorised
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE JANUARY TO MARCH 2017 QUARTERLY REPORT Name Responsibility Date Signature Prepared by M Pattinson (NSL) 11/04/17 Checked by L Banfield (NSL) 11/04/17 Authorised
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE JANUARY TO MARCH 2016 QUARTERLY REPORT
 PERFORMANCE JANUARY TO MARCH 2016 QUARTERLY REPORT") GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE JANUARY TO MARCH 2016 QUARTERLY REPORT Name Responsibility Date Signature Prepared by M Pattinson (NSL) 22/04/16 Checked by L Banfield (NSL) 22/04/16 Authorised
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE JANUARY TO MARCH 2016 QUARTERLY REPORT Name Responsibility Date Signature Prepared by M Pattinson (NSL) 22/04/16 Checked by L Banfield (NSL) 22/04/16 Authorised
THE END OF AN ERA: SVN 10 END-OF-LIFE FREQUENCY STANDARD TESTING
 THE END OF AN ERA: SVN 10 END-OF-LIFE FREQUENCY STANDARD TESTING 1Lt Gary L. Dieter 2d Space Operations Squadron 300 OYMalley Ave., Ste. 41 Falcon AFB, Colorado 80912-3041, USA M.J. Van Melle GPS Navstar
THE END OF AN ERA: SVN 10 END-OF-LIFE FREQUENCY STANDARD TESTING 1Lt Gary L. Dieter 2d Space Operations Squadron 300 OYMalley Ave., Ste. 41 Falcon AFB, Colorado 80912-3041, USA M.J. Van Melle GPS Navstar
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE OCTOBER TO DECEMBER 2017 QUARTERLY REPORT
 PERFORMANCE OCTOBER TO DECEMBER 2017 QUARTERLY REPORT") GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE OCTOBER TO DECEMBER 2017 QUARTERLY REPORT Name Responsibility Date Signature Prepared by M Pattinson (NSL) 16/01/18 Checked by L Banfield (NSL) 16/01/18 Authorised
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE OCTOBER TO DECEMBER 2017 QUARTERLY REPORT Name Responsibility Date Signature Prepared by M Pattinson (NSL) 16/01/18 Checked by L Banfield (NSL) 16/01/18 Authorised
Introduction. Global Positioning System. GPS - Intro. Space Segment. GPS - Intro. Space Segment - Contd..
 Introduction Global Positioning System Prof. D. Nagesh Kumar Dept. of Civil Engg., IISc, Bangalore 560 012, India URL: http://www.civil.iisc.ernet.in/~nagesh GPS is funded and controlled by U. S. Department
Introduction Global Positioning System Prof. D. Nagesh Kumar Dept. of Civil Engg., IISc, Bangalore 560 012, India URL: http://www.civil.iisc.ernet.in/~nagesh GPS is funded and controlled by U. S. Department
MICROSCOPE Mission operational concept
 MICROSCOPE Mission operational concept PY. GUIDOTTI (CNES, Microscope System Manager) January 30 th, 2013 1 Contents 1. Major points of the operational system 2. Operational loop 3. Orbit determination
MICROSCOPE Mission operational concept PY. GUIDOTTI (CNES, Microscope System Manager) January 30 th, 2013 1 Contents 1. Major points of the operational system 2. Operational loop 3. Orbit determination
Space Segment. Orbital Planes. Satellite orbits: GPS satellites are in one of 6 orbital planes. 4 satellites are in each plane
 Satellite orbits: GPS satellites are in one of 6 orbital planes 4 satellites are in each plane Orbital Planes A B C D E F GPS Block IIA Satellite 12 Orbital Plane A GPS Block IIA Satellite 21 GPS Block
Satellite orbits: GPS satellites are in one of 6 orbital planes 4 satellites are in each plane Orbital Planes A B C D E F GPS Block IIA Satellite 12 Orbital Plane A GPS Block IIA Satellite 21 GPS Block
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE JULY TO SEPTEMBER 2018 QUARTERLY REPORT 3
 PERFORMANCE JULY TO SEPTEMBER 2018 QUARTERLY REPORT 3") GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE JULY TO SEPTEMBER 2018 QUARTERLY REPORT 3 Name Responsibility Date Signature Prepared by M McCreadie (NSL) 24/10/2018 Checked by M Pattinson (NSL) 24/10/2018
GLOBAL POSITIONING SYSTEM (GPS) PERFORMANCE JULY TO SEPTEMBER 2018 QUARTERLY REPORT 3 Name Responsibility Date Signature Prepared by M McCreadie (NSL) 24/10/2018 Checked by M Pattinson (NSL) 24/10/2018
SIMPLE METHODS FOR THE ESTIMATION OF THE SHORT-TERM STABILITY OF GNSS ON-BOARD CLOCKS
 SIMPLE METHODS FOR THE ESTIMATION OF THE SHORT-TERM STABILITY OF GNSS ON-BOARD CLOCKS Jérôme Delporte, Cyrille Boulanger, and Flavien Mercier CNES, French Space Agency 18, avenue Edouard Belin, 31401 Toulouse
SIMPLE METHODS FOR THE ESTIMATION OF THE SHORT-TERM STABILITY OF GNSS ON-BOARD CLOCKS Jérôme Delporte, Cyrille Boulanger, and Flavien Mercier CNES, French Space Agency 18, avenue Edouard Belin, 31401 Toulouse
Exploiting AFSCN Ranging Data for Catalog Maintenance A.J. Coster, R. Abbot, L.E. Thornton and D. Durand MIT Lincoln Laboratory
 Exploiting AFSCN Ranging Data for Catalog Maintenance A.J. Coster, R. Abbot, L.E. Thornton and D. Durand MIT Lincoln Laboratory ABSTRACT The Air Force Satellite Control Network (AFSCN) is composed of eight
Exploiting AFSCN Ranging Data for Catalog Maintenance A.J. Coster, R. Abbot, L.E. Thornton and D. Durand MIT Lincoln Laboratory ABSTRACT The Air Force Satellite Control Network (AFSCN) is composed of eight
The Indian Regional Navigation. First Position Fix with IRNSS. Successful Proof-of-Concept Demonstration
 Successful Proof-of-Concept Demonstration First Position Fix with IRNSS A. S. GANESHAN, S. C. RATNAKARA, NIRMALA SRINIVASAN, BABU RAJARAM, NEETHA TIRMAL, KARTIK ANBALAGAN INDIAN SPACE RESEARCH ORGANISATION
Successful Proof-of-Concept Demonstration First Position Fix with IRNSS A. S. GANESHAN, S. C. RATNAKARA, NIRMALA SRINIVASAN, BABU RAJARAM, NEETHA TIRMAL, KARTIK ANBALAGAN INDIAN SPACE RESEARCH ORGANISATION
Exploiting AFSCN Ranging Data for Catalog Maintenance
 Exploiting AFSCN Ranging Data for Catalog Maintenance A. J. Coster, R. Abbot, L. E. Thornton, D. Durand 2001 Space Control Conference 3 April 2001 4.03.01-1 This work is sponsored by the Air Force under
Exploiting AFSCN Ranging Data for Catalog Maintenance A. J. Coster, R. Abbot, L. E. Thornton, D. Durand 2001 Space Control Conference 3 April 2001 4.03.01-1 This work is sponsored by the Air Force under
RECENT TIMING ACTIVITIES AT THE U.S. NAVAL RESEARCH LABORATORY
 RECENT TIMING ACTIVITIES AT THE U.S. NAVAL RESEARCH LABORATORY Ronald Beard, Jay Oaks, Ken Senior, and Joe White U.S. Naval Research Laboratory 4555 Overlook Ave. SW, Washington DC 20375-5320, USA Abstract
RECENT TIMING ACTIVITIES AT THE U.S. NAVAL RESEARCH LABORATORY Ronald Beard, Jay Oaks, Ken Senior, and Joe White U.S. Naval Research Laboratory 4555 Overlook Ave. SW, Washington DC 20375-5320, USA Abstract
SPAN Technology System Characteristics and Performance
 SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
GPS SIGNAL INTEGRITY DEPENDENCIES ON ATOMIC CLOCKS *
 GPS SIGNAL INTEGRITY DEPENDENCIES ON ATOMIC CLOCKS * Marc Weiss Time and Frequency Division National Institute of Standards and Technology 325 Broadway, Boulder, CO 80305, USA E-mail: mweiss@boulder.nist.gov
GPS SIGNAL INTEGRITY DEPENDENCIES ON ATOMIC CLOCKS * Marc Weiss Time and Frequency Division National Institute of Standards and Technology 325 Broadway, Boulder, CO 80305, USA E-mail: mweiss@boulder.nist.gov
Methodology and Case Studies of Signal-in-Space Error Calculation Top-down Meets Bottom-up
 Methodology and Case Studies of Signal-in-Space Error Calculation Top-down Meets Bottom-up Grace Xingxin Gao*, Haochen Tang*, Juan Blanch*, Jiyun Lee+, Todd Walter* and Per Enge* * Stanford University,
Methodology and Case Studies of Signal-in-Space Error Calculation Top-down Meets Bottom-up Grace Xingxin Gao*, Haochen Tang*, Juan Blanch*, Jiyun Lee+, Todd Walter* and Per Enge* * Stanford University,
Report on Extended Kalman Filter Simulation Experiments
 Report on Extended Kalman Filter Simulation Experiments Aeronautical Engineering 551 Integrated Navigation and Guidance Systems Chad R. Frost December 6, 1997 Introduction This report describes my experiments
Report on Extended Kalman Filter Simulation Experiments Aeronautical Engineering 551 Integrated Navigation and Guidance Systems Chad R. Frost December 6, 1997 Introduction This report describes my experiments
IDEAS FOR FUTURE GPS TIMING IMPROVEMENTS
 IDEAS FOR FUTURE GPS TIMING IMPROVEMENTS Capt Steven T. Hutsell, USAF 2d Space Operations Squadron 300 O'Malley Avenue Suite 41 Falcon AFB CO 80912-3041 Abstract Having recently met slringent criteria
IDEAS FOR FUTURE GPS TIMING IMPROVEMENTS Capt Steven T. Hutsell, USAF 2d Space Operations Squadron 300 O'Malley Avenue Suite 41 Falcon AFB CO 80912-3041 Abstract Having recently met slringent criteria
Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation
 Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation Zhaonian Zhang, Department of Geomatics Engineering, The University of Calgary BIOGRAPHY Zhaonian Zhang is a MSc student
Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation Zhaonian Zhang, Department of Geomatics Engineering, The University of Calgary BIOGRAPHY Zhaonian Zhang is a MSc student
EUROPEAN GNSS (GALILEO) INITIAL SERVICES NAVIGATION SOLUTIONS POWERED BY E U R O P E OPEN SERVICE QUARTERLY PERFORMANCE REPORT
 INITIAL SERVICES NAVIGATION SOLUTIONS POWERED BY E U R O P E OPEN SERVICE QUARTERLY PERFORMANCE REPORT") NAVIGATION SOLUTIONS POWERED BY E U R O P E EUROPEAN GNSS (GALILEO) INITIAL SERVICES OPEN SERVICE QUARTERLY PERFORMANCE REPORT JANUARY - MARCH 2018 TABLE OF CONTENTS 1 INTRODUCTION... 1 2 EXECUTIVE SUMMARY...
NAVIGATION SOLUTIONS POWERED BY E U R O P E EUROPEAN GNSS (GALILEO) INITIAL SERVICES OPEN SERVICE QUARTERLY PERFORMANCE REPORT JANUARY - MARCH 2018 TABLE OF CONTENTS 1 INTRODUCTION... 1 2 EXECUTIVE SUMMARY...
THE DEVELOPMENT OF MULTI-CHANNEL GPS RECEIVERS AT THE CSIR - NATIONAL METROLOGY LABORATORY
 32nd Annual Precise Time and Time Interval (PTTI) Meeting THE DEVELOPMENT OF MULTI-CHANNEL GPS RECEIVERS AT THE CSIR - NATIONAL METROLOGY LABORATORY E. L. Marais CSIR-NML, P.O. Box 395, Pretoria, 0001,
32nd Annual Precise Time and Time Interval (PTTI) Meeting THE DEVELOPMENT OF MULTI-CHANNEL GPS RECEIVERS AT THE CSIR - NATIONAL METROLOGY LABORATORY E. L. Marais CSIR-NML, P.O. Box 395, Pretoria, 0001,
TIME AND FREQUENCY ACTIVITIES AT THE CSIR NATIONAL METROLOGY LABORATORY
 TIME AND FREQUENCY ACTIVITIES AT THE CSIR NATIONAL METROLOGY LABORATORY E. L. Marais and B. Theron CSIR National Metrology Laboratory PO Box 395, Pretoria, 0001, South Africa Tel: +27 12 841 3013; Fax:
TIME AND FREQUENCY ACTIVITIES AT THE CSIR NATIONAL METROLOGY LABORATORY E. L. Marais and B. Theron CSIR National Metrology Laboratory PO Box 395, Pretoria, 0001, South Africa Tel: +27 12 841 3013; Fax:
THE TIME DISTRIBUTION SYSTEM FOR THE WIDE AREA AUGMENTATION SYSTEM (WAAS)
") 30th Annual Precise Time and Time Interval (PTTI, Meeting THE TIME DISTRIBUTION SYSTEM FOR THE WIDE AREA AUGMENTATION SYSTEM (WAAS) William J. Klepczynski Innovative Solutions International, Inc. 1608
30th Annual Precise Time and Time Interval (PTTI, Meeting THE TIME DISTRIBUTION SYSTEM FOR THE WIDE AREA AUGMENTATION SYSTEM (WAAS) William J. Klepczynski Innovative Solutions International, Inc. 1608
Configuring the Global Navigation Satellite System
 Configuring the Global Navigation Satellite System Effective Cisco IOS-XE Release 3.17, the Cisco ASR 903 (with RSP3 module) and Cisco ASR 907 router uses a satellite receiver, also called the global navigation
Configuring the Global Navigation Satellite System Effective Cisco IOS-XE Release 3.17, the Cisco ASR 903 (with RSP3 module) and Cisco ASR 907 router uses a satellite receiver, also called the global navigation
CLOCK MANAGEMENT DATA ANALYSIS FOR SATELLITE COMMUNICATIONS
 CLOCK MANAGEMENT DATA ANALYSIS FOR SATELLITE COMMUNICATIONS Rachel Gross Space Applications, Code 8151 US Naval Research Laboratory Washington, DC USA gross@juno.nrl.navy.mil Abstract The U.S. Naval Research
CLOCK MANAGEMENT DATA ANALYSIS FOR SATELLITE COMMUNICATIONS Rachel Gross Space Applications, Code 8151 US Naval Research Laboratory Washington, DC USA gross@juno.nrl.navy.mil Abstract The U.S. Naval Research
Ground Station Design for STSAT-3
 Technical Paper Int l J. of Aeronautical & Space Sci. 12(3), 283 287 (2011) DOI:10.5139/IJASS.2011.12.3.283 Ground Station Design for STSAT-3 KyungHee Kim*, Hyochoong Bang*, Jang-Soo Chae**, Hong-Young
Technical Paper Int l J. of Aeronautical & Space Sci. 12(3), 283 287 (2011) DOI:10.5139/IJASS.2011.12.3.283 Ground Station Design for STSAT-3 KyungHee Kim*, Hyochoong Bang*, Jang-Soo Chae**, Hong-Young
Outlier-Robust Estimation of GPS Satellite Clock Offsets
 Outlier-Robust Estimation of GPS Satellite Clock Offsets Simo Martikainen, Robert Piche and Simo Ali-Löytty Tampere University of Technology. Tampere, Finland Email: simo.martikainen@tut.fi Abstract A
Outlier-Robust Estimation of GPS Satellite Clock Offsets Simo Martikainen, Robert Piche and Simo Ali-Löytty Tampere University of Technology. Tampere, Finland Email: simo.martikainen@tut.fi Abstract A
Risk Mitigation in the Ground Mission Segment using the Galileo System Test Bed
 Risk Mitigation in the Ground Mission Segment using the Galileo System Test Bed 10 Years IGS 4 March 2004, Bern Marco.Falcone@esa.int Manfred.Lugert@esa.int Service Performance GALILEO Global Services
Risk Mitigation in the Ground Mission Segment using the Galileo System Test Bed 10 Years IGS 4 March 2004, Bern Marco.Falcone@esa.int Manfred.Lugert@esa.int Service Performance GALILEO Global Services
TIME DISTRIBUTION CAPABILITIES OF THE WIDE AREA AUGMENTATION SYSTEM (WAAS)
") 33rdAnnual Precise Time and Time Interval (PZTI) Meeting TIME DISTRIBUTION CAPABILITIES OF THE WIDE AREA AUGMENTATION SYSTEM (WAAS) William J. Klepczynski IS1 Pat Fenton NovAtel Corp. Ed Powers U.S. Naval
33rdAnnual Precise Time and Time Interval (PZTI) Meeting TIME DISTRIBUTION CAPABILITIES OF THE WIDE AREA AUGMENTATION SYSTEM (WAAS) William J. Klepczynski IS1 Pat Fenton NovAtel Corp. Ed Powers U.S. Naval
GLOBAL POSITIONING SYSTEM STANDARD POSITIONING SERVICE SIGNAL SPECIFICATION
 GLOBAL POSITIONING SYSTEM STANDARD POSITIONING SERVICE SIGNAL SPECIFICATION ANNEX A STANDARD POSITIONING SERVICE PERFORMANCE SPECIFICATION June 2, 1995 June 2, 1995 ANNEX A: Standard Positioning Service
GLOBAL POSITIONING SYSTEM STANDARD POSITIONING SERVICE SIGNAL SPECIFICATION ANNEX A STANDARD POSITIONING SERVICE PERFORMANCE SPECIFICATION June 2, 1995 June 2, 1995 ANNEX A: Standard Positioning Service
Understanding GPS/GNSS
 Understanding GPS/GNSS Principles and Applications Third Edition Contents Preface to the Third Edition Third Edition Acknowledgments xix xxi CHAPTER 1 Introduction 1 1.1 Introduction 1 1.2 GNSS Overview
Understanding GPS/GNSS Principles and Applications Third Edition Contents Preface to the Third Edition Third Edition Acknowledgments xix xxi CHAPTER 1 Introduction 1 1.1 Introduction 1 1.2 GNSS Overview
Configuring the Global Navigation Satellite System
 Configuring the Global Navigation Satellite System uses a satellite receiver, also called the global navigation satellite system (GNSS), as a new timing interface. In typical telecom networks, synchronization
Configuring the Global Navigation Satellite System uses a satellite receiver, also called the global navigation satellite system (GNSS), as a new timing interface. In typical telecom networks, synchronization
RESULTS OF A CONTINUOUS TRANSATLANTIC TWO-WAY TIME TRANSFER TEST USING COMMERCIAL SATELLITE MODEMS
 32nd Annual Precise Time and Time Interval (PTTI) Meeting RESULTS OF A CONTINUOUS TRANSATLANTIC TWO-WAY TIME TRANSFER TEST USING COMMERCIAL SATELLITE MODEMS T. P. Celano, Timing Solutions Corporation S.
32nd Annual Precise Time and Time Interval (PTTI) Meeting RESULTS OF A CONTINUOUS TRANSATLANTIC TWO-WAY TIME TRANSFER TEST USING COMMERCIAL SATELLITE MODEMS T. P. Celano, Timing Solutions Corporation S.
USNO ALTERNATE MASTER CLOCK STEERING
 32nd Annual Precise Time and Time Interval (PTTI) Meeting USNO ALTERNATE MASTER CLOCK STEERING Steven T. Hutsell U.S. Naval Observatory Alternate Master Clock 400 O Malley Avenue, Suite 44 Schriever AFB,
32nd Annual Precise Time and Time Interval (PTTI) Meeting USNO ALTERNATE MASTER CLOCK STEERING Steven T. Hutsell U.S. Naval Observatory Alternate Master Clock 400 O Malley Avenue, Suite 44 Schriever AFB,
CONTINUED EVALUATION OF CARRIER-PHASE GNSS TIMING RECEIVERS FOR UTC/TAI APPLICATIONS
 CONTINUED EVALUATION OF CARRIER-PHASE GNSS TIMING RECEIVERS FOR UTC/TAI APPLICATIONS Jeff Prillaman U.S. Naval Observatory 3450 Massachusetts Avenue, NW Washington, D.C. 20392, USA Tel: +1 (202) 762-0756
CONTINUED EVALUATION OF CARRIER-PHASE GNSS TIMING RECEIVERS FOR UTC/TAI APPLICATIONS Jeff Prillaman U.S. Naval Observatory 3450 Massachusetts Avenue, NW Washington, D.C. 20392, USA Tel: +1 (202) 762-0756
Methodology and Case Studies of Signal-in-Space Error Calculation
 Methodology and Case Studies of Signal-in-Space Error Calculation Top-down Meets Bottom-up Grace Xingxin Gao *, Haochen Tang *, Juan Blanch *, Jiyun Lee +, Todd Walter * and Per Enge * * Stanford University,
Methodology and Case Studies of Signal-in-Space Error Calculation Top-down Meets Bottom-up Grace Xingxin Gao *, Haochen Tang *, Juan Blanch *, Jiyun Lee +, Todd Walter * and Per Enge * * Stanford University,
Automated Quality Control of Global Navigation Satellite System (GNSS) Data
 Data") P-315 Automated Quality Control of Global Navigation Satellite System (GNSS) Data S.Senthil Kumar* & Arun Kumar Chauhan, ONGC Summary Global Navigation Satellite System (GNSS), includes GPS, GLONASS and
P-315 Automated Quality Control of Global Navigation Satellite System (GNSS) Data S.Senthil Kumar* & Arun Kumar Chauhan, ONGC Summary Global Navigation Satellite System (GNSS), includes GPS, GLONASS and
Configuring the Global Navigation Satellite System
 Configuring the Global Navigation Satellite System Effective Cisco IOS-XE Release 3.17, the Cisco ASR-920-12SZ-IM router uses a satellite receiver, also called the global navigation satellite system (GNSS),
Configuring the Global Navigation Satellite System Effective Cisco IOS-XE Release 3.17, the Cisco ASR-920-12SZ-IM router uses a satellite receiver, also called the global navigation satellite system (GNSS),
Experiment 9. PID Controller
 Experiment 9 PID Controller Objective: - To be familiar with PID controller. - Noting how changing PID controller parameter effect on system response. Theory: The basic function of a controller is to execute
Experiment 9 PID Controller Objective: - To be familiar with PID controller. - Noting how changing PID controller parameter effect on system response. Theory: The basic function of a controller is to execute
CCTF 2012 Report on Time & Frequency activities at National Physical Laboratory, India (NPLI)
") CCTF 2012 Report on Time & Frequency activities at National Physical Laboratory, India (NPLI) Major activities of the Time & Frequency division of NPLI in the last three years have been: 1. Maintenance
CCTF 2012 Report on Time & Frequency activities at National Physical Laboratory, India (NPLI) Major activities of the Time & Frequency division of NPLI in the last three years have been: 1. Maintenance
Sources of Geographic Information
 Sources of Geographic Information Data properties: Spatial data, i.e. data that are associated with geographic locations Data format: digital (analog data for traditional paper maps) Data Inputs: sampled
Sources of Geographic Information Data properties: Spatial data, i.e. data that are associated with geographic locations Data format: digital (analog data for traditional paper maps) Data Inputs: sampled
micro-gloss The new intelligence in gloss measurement Brilliant color display: easy to read - easy to use Auto diagnosis: Standard OK - Calibration OK
 micro-gloss The new intelligence in gloss measurement The micro-gloss has been the unsurpassed industry standard in gloss measurement for many years. It is the only glossmeter combining the highest accuracy,
micro-gloss The new intelligence in gloss measurement The micro-gloss has been the unsurpassed industry standard in gloss measurement for many years. It is the only glossmeter combining the highest accuracy,
Victor S. Reinhardt and Charles B. Sheckells Hughes Space and Communications Company P. O. Box 92919, Los Angeles, CA 90009
 Published in the proceedings of the 31st NASA-DOD Precise Time and Time Interval Planning Meeting (Dana Point, California), 1999. REDUNDANT ATOMIC FREQUENCY STANDARD TIME KEEPING SYSTEM WITH SEAMLESS AFS
Published in the proceedings of the 31st NASA-DOD Precise Time and Time Interval Planning Meeting (Dana Point, California), 1999. REDUNDANT ATOMIC FREQUENCY STANDARD TIME KEEPING SYSTEM WITH SEAMLESS AFS
German Timing Expertise to Support Galileo
 German Timing Expertise to Support Galileo Jens Hammesfahr, Alexandre Moudrak German Aerospace Center (DLR) Institute of Communications and Navigation Muenchener Str. 20, 82234 Wessling, Germany jens.hammesfahr@dlr.de
German Timing Expertise to Support Galileo Jens Hammesfahr, Alexandre Moudrak German Aerospace Center (DLR) Institute of Communications and Navigation Muenchener Str. 20, 82234 Wessling, Germany jens.hammesfahr@dlr.de
Unmanned Air Systems. Naval Unmanned Combat. Precision Navigation for Critical Operations. DEFENSE Precision Navigation
 NAVAIR Public Release 2012-152. Distribution Statement A - Approved for public release; distribution is unlimited. FIGURE 1 Autonomous air refuleing operational view. Unmanned Air Systems Precision Navigation
NAVAIR Public Release 2012-152. Distribution Statement A - Approved for public release; distribution is unlimited. FIGURE 1 Autonomous air refuleing operational view. Unmanned Air Systems Precision Navigation
NGA s Support for Positioning and Navigation
 NGA s Support for Positioning and Navigation PNT Symposium 6 November 2007 Barbara Wiley NATIONAL GEOSPATIAL-INTELLIGENCE AGENCY What is NGA and What Do We Do? National Geospatial-Intelligence Agency (NGA)
NGA s Support for Positioning and Navigation PNT Symposium 6 November 2007 Barbara Wiley NATIONAL GEOSPATIAL-INTELLIGENCE AGENCY What is NGA and What Do We Do? National Geospatial-Intelligence Agency (NGA)
Modelling GPS Observables for Time Transfer
 Modelling GPS Observables for Time Transfer Marek Ziebart Department of Geomatic Engineering University College London Presentation structure Overview of GPS Time frames in GPS Introduction to GPS observables
Modelling GPS Observables for Time Transfer Marek Ziebart Department of Geomatic Engineering University College London Presentation structure Overview of GPS Time frames in GPS Introduction to GPS observables
Chapter 6. Temperature Effects
 Chapter 6. Temperature Effects 6.1 Introduction This chapter documents the investigation into temperature drifts that can cause a receiver clock bias even when a stable reference is used. The first step
Chapter 6. Temperature Effects 6.1 Introduction This chapter documents the investigation into temperature drifts that can cause a receiver clock bias even when a stable reference is used. The first step
Clock Steering Using Frequency Estimates from Stand-alone GPS Receiver Carrier Phase Observations
 Clock Steering Using Frequency Estimates from Stand-alone GPS Receiver Carrier Phase Observations Edward Byrne 1, Thao Q. Nguyen 2, Lars Boehnke 1, Frank van Graas 3, and Samuel Stein 1 1 Symmetricom Corporation,
Clock Steering Using Frequency Estimates from Stand-alone GPS Receiver Carrier Phase Observations Edward Byrne 1, Thao Q. Nguyen 2, Lars Boehnke 1, Frank van Graas 3, and Samuel Stein 1 1 Symmetricom Corporation,
Report of the Working Group B: Enhancement of Global Navigation Satellite Systems (GNSS) Services Performance
 Services Performance") Report of the Working Group B: Enhancement of Global Navigation Satellite Systems (GNSS) Services Performance 1. The Working Group on Enhancement of Global Navigation Satellite Systems (GNSS) Service Performance
Report of the Working Group B: Enhancement of Global Navigation Satellite Systems (GNSS) Services Performance 1. The Working Group on Enhancement of Global Navigation Satellite Systems (GNSS) Service Performance
Understanding GPS: Principles and Applications Second Edition
 Understanding GPS: Principles and Applications Second Edition Elliott Kaplan and Christopher Hegarty ISBN 1-58053-894-0 Approx. 680 pages Navtech Part #1024 This thoroughly updated second edition of an
Understanding GPS: Principles and Applications Second Edition Elliott Kaplan and Christopher Hegarty ISBN 1-58053-894-0 Approx. 680 pages Navtech Part #1024 This thoroughly updated second edition of an
GLOBAL NAVIGATION SATELLITE SYSTEMS (GNSS) ECE 2526E Tuesday, 24 April 2018
 ECE 2526E Tuesday, 24 April 2018") GLOBAL NAVIGATION SATELLITE SYSTEMS (GNSS) ECE 2526E Tuesday, 24 April 2018 MAJOR GLOBAL NAVIGATION SATELLITE SYSTEMS (GNSS) Global Navigation Satellite System (GNSS) includes: 1. Global Position System
GLOBAL NAVIGATION SATELLITE SYSTEMS (GNSS) ECE 2526E Tuesday, 24 April 2018 MAJOR GLOBAL NAVIGATION SATELLITE SYSTEMS (GNSS) Global Navigation Satellite System (GNSS) includes: 1. Global Position System
First Evaluation of a Rapid Time Transfer within the IGS Global Real-Time Network
 First Evaluation of a Rapid Time Transfer within the IGS Global Real-Time Network Diego Orgiazzi, Patrizia Tavella, Giancarlo Cerretto Time and Frequency Metrology Department Istituto Elettrotecnico Nazionale
First Evaluation of a Rapid Time Transfer within the IGS Global Real-Time Network Diego Orgiazzi, Patrizia Tavella, Giancarlo Cerretto Time and Frequency Metrology Department Istituto Elettrotecnico Nazionale
GPS Timing and Synchronization: Characterization and Spatial Correlation. 8/11/2017 Rob Halliday High Energy Astrophysics Group, CWRU
 GPS Timing and Synchronization: Characterization and Spatial Correlation 8/11/2017 Rob Halliday High Energy Astrophysics Group, CWRU GPS Basics GPS Constellation: 30+ Satellites, orbiting earth at 26.6Mm,
GPS Timing and Synchronization: Characterization and Spatial Correlation 8/11/2017 Rob Halliday High Energy Astrophysics Group, CWRU GPS Basics GPS Constellation: 30+ Satellites, orbiting earth at 26.6Mm,
A GLONASS Observation Message Compatible With The Compact Measurement Record Format
 A GLONASS Observation Message Compatible With The Compact Measurement Record Format Leica Geosystems AG 1 Introduction Real-time kinematic (RTK) Global Navigation Satellite System (GNSS) positioning has
A GLONASS Observation Message Compatible With The Compact Measurement Record Format Leica Geosystems AG 1 Introduction Real-time kinematic (RTK) Global Navigation Satellite System (GNSS) positioning has
New Real Time Clock Combines Ensemble of Input Clocks and Provides a more Stable Output than Any of the Input Clocks
 1 PRECISION - OUR BUSINESS. New Real Time Clock Combines Ensemble of Input Clocks and Provides a more Stable Output than Any of the Input Clocks Werner Lange Lange-Electronic GmbH Rudolf-Diesel-Str. 29
1 PRECISION - OUR BUSINESS. New Real Time Clock Combines Ensemble of Input Clocks and Provides a more Stable Output than Any of the Input Clocks Werner Lange Lange-Electronic GmbH Rudolf-Diesel-Str. 29
Technology of Precise Orbit Determination
 Technology of Precise Orbit Determination V Seiji Katagiri V Yousuke Yamamoto (Manuscript received March 19, 2008) Since 1971, most domestic orbit determination systems have been developed by Fujitsu and
Technology of Precise Orbit Determination V Seiji Katagiri V Yousuke Yamamoto (Manuscript received March 19, 2008) Since 1971, most domestic orbit determination systems have been developed by Fujitsu and
Configuring the Global Navigation Satellite System
 Configuring the Global Navigation Satellite System Effective Cisco IOS-XE Release 3.17, the Cisco ASR-920-12SZ-IM router uses a satellite receiver, also called the global navigation satellite system (GNSS),
Configuring the Global Navigation Satellite System Effective Cisco IOS-XE Release 3.17, the Cisco ASR-920-12SZ-IM router uses a satellite receiver, also called the global navigation satellite system (GNSS),
Demonstrations of Multi-Constellation Advanced RAIM for Vertical Guidance using GPS and GLONASS Signals
 Demonstrations of Multi-Constellation Advanced RAIM for Vertical Guidance using GPS and GLONASS Signals Myungjun Choi, Juan Blanch, Stanford University Dennis Akos, University of Colorado Boulder Liang
Demonstrations of Multi-Constellation Advanced RAIM for Vertical Guidance using GPS and GLONASS Signals Myungjun Choi, Juan Blanch, Stanford University Dennis Akos, University of Colorado Boulder Liang
RESULTS FROM TIME TRANSFER EXPERIMENTS BASED ON GLONASS P-CODE MEASUREMENTS FROM RINEX FILES
 32nd Annual Precise Time and Time Interval (PTTI) Meeting RESULTS FROM TIME TRANSFER EXPERIMENTS BASED ON GLONASS P-CODE MEASUREMENTS FROM RINEX FILES F. Roosbeek, P. Defraigne, C. Bruyninx Royal Observatory
32nd Annual Precise Time and Time Interval (PTTI) Meeting RESULTS FROM TIME TRANSFER EXPERIMENTS BASED ON GLONASS P-CODE MEASUREMENTS FROM RINEX FILES F. Roosbeek, P. Defraigne, C. Bruyninx Royal Observatory
THE TIME KEEPING SYSTEM FOR GPS BLOCK IIR
 THE TIME KEEPING SYSTEM FOR GPS BLOCK IIR H. C. RAWICZ; M. A. EPSTEIN and J. A. RAJAN ITT Aerospace/Communications Division 108 Kingsland Road, Clifton, NJ Abstract The precision time keeping system [TKS)
THE TIME KEEPING SYSTEM FOR GPS BLOCK IIR H. C. RAWICZ; M. A. EPSTEIN and J. A. RAJAN ITT Aerospace/Communications Division 108 Kingsland Road, Clifton, NJ Abstract The precision time keeping system [TKS)
Time and Frequency Measurements for Oscillator Manufacturers
 Time and Frequency Measurements for Oscillator Manufacturers Using the FCA3000 and FCA3100 Series Timer/Counter/Analyzers Application Note Application Note Introduction Designing and manufacturing oscillators
Time and Frequency Measurements for Oscillator Manufacturers Using the FCA3000 and FCA3100 Series Timer/Counter/Analyzers Application Note Application Note Introduction Designing and manufacturing oscillators
Principles of the Global Positioning System Lecture 19
 12.540 Principles of the Global Positioning System Lecture 19 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 GPS Models and processing Summary: Finish up modeling aspects Rank deficiencies Processing
12.540 Principles of the Global Positioning System Lecture 19 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 GPS Models and processing Summary: Finish up modeling aspects Rank deficiencies Processing
Configuring the Global Navigation Satellite System
 Configuring the Global Navigation Satellite System Effective Cisco IOS-XE Release 3.17, the Cisco ASR-920-12SZ-IM router uses a satellite receiver, also called the global navigation satellite system (GNSS),
Configuring the Global Navigation Satellite System Effective Cisco IOS-XE Release 3.17, the Cisco ASR-920-12SZ-IM router uses a satellite receiver, also called the global navigation satellite system (GNSS),
Air Force Institute of Technology. A CubeSat Mission for Locating and Mapping Spot Beams of GEO Comm-Satellites
 Air Force Institute of Technology A CubeSat Mission for Locating and Mapping Spot Beams of GEO Comm-Satellites Lt. Jake LaSarge PI: Dr. Jonathan Black Dr. Brad King Dr. Gary Duke August 9, 2015 1 Outline
Air Force Institute of Technology A CubeSat Mission for Locating and Mapping Spot Beams of GEO Comm-Satellites Lt. Jake LaSarge PI: Dr. Jonathan Black Dr. Brad King Dr. Gary Duke August 9, 2015 1 Outline
Interim Report of the COMS INR Performance Enhancement through the 1 st Four Years of Normal Operation
 Interim Report of the COMS INR Performance Enhancement through the 1 st Four Years of Normal Operation Han-dol KIM*, Jin WOO** *Korea Aerospace Research Institute (KARI) hkim@kari.re.kr **Korea Meteorological
Interim Report of the COMS INR Performance Enhancement through the 1 st Four Years of Normal Operation Han-dol KIM*, Jin WOO** *Korea Aerospace Research Institute (KARI) hkim@kari.re.kr **Korea Meteorological
TWO-WAY SATELLITE TIME TRANSFER (TWSTT): USNO OPERATIONS AND CALIBRATION SERVICES
: USNO OPERATIONS AND CALIBRATION SERVICES") 90th Annual Pmise Time and Time Interval (PTTI) Meeting TWO-WAY SATELLITE TIME TRANSFER (TWSTT): USNO OPERATIONS AND CALIBRATION SERVICES James A. DeYoung U.S. Naval Observatory 3450 Massachusetts Avenue,
90th Annual Pmise Time and Time Interval (PTTI) Meeting TWO-WAY SATELLITE TIME TRANSFER (TWSTT): USNO OPERATIONS AND CALIBRATION SERVICES James A. DeYoung U.S. Naval Observatory 3450 Massachusetts Avenue,
EFTF 2012 Smartphone application for the near-real time synchronization and monitoring of clocks through a network of GNSS receivers
 EFTF 2012 Smartphone application for the near-real time synchronization and monitoring of clocks through a network of GNSS receivers APRIL 26 th, 2012 GÖTEBORG, SWEDEN SESSION C3L-B: GNSS AND APPLICATIONS
EFTF 2012 Smartphone application for the near-real time synchronization and monitoring of clocks through a network of GNSS receivers APRIL 26 th, 2012 GÖTEBORG, SWEDEN SESSION C3L-B: GNSS AND APPLICATIONS
magicgnss: QUALITY DATA, ALGORITHMS AND PRODUCTS FOR THE GNSS USER COMMUNITY
 SEMANA GEOMATICA 2009 magicgnss: QUALITY DATA, ALGORITHMS AND PRODUCTS FOR THE GNSS USER COMMUNITY MARCH 3, 2009 BARCELONA, SPAIN SESSION: GNSS PRODUCTS A. Mozo P. Navarro R. Píriz D. Rodríguez March 3,
SEMANA GEOMATICA 2009 magicgnss: QUALITY DATA, ALGORITHMS AND PRODUCTS FOR THE GNSS USER COMMUNITY MARCH 3, 2009 BARCELONA, SPAIN SESSION: GNSS PRODUCTS A. Mozo P. Navarro R. Píriz D. Rodríguez March 3,
Primer on GPS Operations
 MP Rugged Wireless Modem Primer on GPS Operations 2130313 Rev 1.0 Cover illustration by Emma Jantz-Lee (age 11). An Introduction to GPS This primer is intended to provide the foundation for understanding
MP Rugged Wireless Modem Primer on GPS Operations 2130313 Rev 1.0 Cover illustration by Emma Jantz-Lee (age 11). An Introduction to GPS This primer is intended to provide the foundation for understanding
RELEASE NOTES. Introduction. Trimble Infrastructure GNSS Series Receivers
 RELEASE NOTES Trimble Infrastructure GNSS Series Receivers These release notes describe the latest improvements made to the Trimble NetR9 GNSS Infrastructure series receivers. Introduction New Features
RELEASE NOTES Trimble Infrastructure GNSS Series Receivers These release notes describe the latest improvements made to the Trimble NetR9 GNSS Infrastructure series receivers. Introduction New Features
ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
 Journal of Young Scientist, Volume IV, 2016 ISSN 2344-1283; ISSN CD-ROM 2344-1291; ISSN Online 2344-1305; ISSN-L 2344 1283 ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
Journal of Young Scientist, Volume IV, 2016 ISSN 2344-1283; ISSN CD-ROM 2344-1291; ISSN Online 2344-1305; ISSN-L 2344 1283 ARDUINO BASED CALIBRATION OF AN INERTIAL SENSOR IN VIEW OF A GNSS/IMU INTEGRATION
PDHonline Course L105 (12 PDH) GPS Surveying. Instructor: Jan Van Sickle, P.L.S. PDH Online PDH Center
 GPS Surveying. Instructor: Jan Van Sickle, P.L.S. PDH Online PDH Center") PDHonline Course L105 (12 PDH) GPS Surveying Instructor: Jan Van Sickle, P.L.S. 2012 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
PDHonline Course L105 (12 PDH) GPS Surveying Instructor: Jan Van Sickle, P.L.S. 2012 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
The Impact of the GPS UTC Anomaly Event of 26 January 2016 on the Global Timing Community
 The Impact of the GPS UTC Anomaly Event of 26 January 2016 on the Global Timing Community Prof Charles Curry, BEng, CEng, FIET, FRIN Chronos Technology Ltd BIOGRAPHY Charles Curry is a Chartered Engineer,
The Impact of the GPS UTC Anomaly Event of 26 January 2016 on the Global Timing Community Prof Charles Curry, BEng, CEng, FIET, FRIN Chronos Technology Ltd BIOGRAPHY Charles Curry is a Chartered Engineer,
THE CRYSTAL OSCILLATOR CHARACTERIZATION FACILITY AT THE AEROSPACE CORPORATION
 THE CRYSTAL OSCILLATOR CHARACTERIZATION FACILITY AT THE AEROSPACE CORPORATION S. Karuza, M. Rolenz, A. Moulthrop, A. Young, and V. Hunt The Aerospace Corporation El Segundo, CA 90245, USA Abstract At the
THE CRYSTAL OSCILLATOR CHARACTERIZATION FACILITY AT THE AEROSPACE CORPORATION S. Karuza, M. Rolenz, A. Moulthrop, A. Young, and V. Hunt The Aerospace Corporation El Segundo, CA 90245, USA Abstract At the
Technical Notes LAND MAPPING APPLICATIONS. Leading the way with increased reliability.
 LAND MAPPING APPLICATIONS Technical Notes Leading the way with increased reliability. Industry-leading post-processing software designed to maximize the accuracy potential of your POS LV (Position and
LAND MAPPING APPLICATIONS Technical Notes Leading the way with increased reliability. Industry-leading post-processing software designed to maximize the accuracy potential of your POS LV (Position and
ERS-2 SAR CYCLIC REPORT
 ERS-2 SAR CYCLIC REPORT C YCLE 101 14-DEC-2004 to 18-JAN-2005 Orbit 50456 to 50957 Prepared by: PCS SAR TEAM Issue: 1.0 Reference: Date of Issue Status: Document type: Technical Note Approved by: T A B
ERS-2 SAR CYCLIC REPORT C YCLE 101 14-DEC-2004 to 18-JAN-2005 Orbit 50456 to 50957 Prepared by: PCS SAR TEAM Issue: 1.0 Reference: Date of Issue Status: Document type: Technical Note Approved by: T A B
ProMark 500 White Paper
 ProMark 500 White Paper How Magellan Optimally Uses GLONASS in the ProMark 500 GNSS Receiver How Magellan Optimally Uses GLONASS in the ProMark 500 GNSS Receiver 1. Background GLONASS brings to the GNSS
ProMark 500 White Paper How Magellan Optimally Uses GLONASS in the ProMark 500 GNSS Receiver How Magellan Optimally Uses GLONASS in the ProMark 500 GNSS Receiver 1. Background GLONASS brings to the GNSS
GNSS Integrity Monitoring
 www.dlr.de Chart 1 GNSS Integrity Monitoring Martini - Rome, 22 June 2017 GNSS Integrity Monitoring Dr. Ilaria Martini Institute of Communications and Navigation German Aerospace Center Rome, 22.06.2017
www.dlr.de Chart 1 GNSS Integrity Monitoring Martini - Rome, 22 June 2017 GNSS Integrity Monitoring Dr. Ilaria Martini Institute of Communications and Navigation German Aerospace Center Rome, 22.06.2017
Multi GNSS Current Status and Future Session 2.3 Multi GNSS Environment
 Multi GNSS Current Status and Future Session 2.3 Multi GNSS Environment Larry D. Hothem Senior Advisor for GPS/GNSS Technical Issues Member US Delegation to the ICG DOI Lead Member, GPS International Working
Multi GNSS Current Status and Future Session 2.3 Multi GNSS Environment Larry D. Hothem Senior Advisor for GPS/GNSS Technical Issues Member US Delegation to the ICG DOI Lead Member, GPS International Working
ANALYSIS OF GPS SATELLITE OBSERVABILITY OVER THE INDIAN SOUTHERN REGION
 TJPRC: International Journal of Signal Processing Systems (TJPRC: IJSPS) Vol. 1, Issue 2, Dec 2017, 1-14 TJPRC Pvt. Ltd. ANALYSIS OF GPS SATELLITE OBSERVABILITY OVER THE INDIAN SOUTHERN REGION ANU SREE
TJPRC: International Journal of Signal Processing Systems (TJPRC: IJSPS) Vol. 1, Issue 2, Dec 2017, 1-14 TJPRC Pvt. Ltd. ANALYSIS OF GPS SATELLITE OBSERVABILITY OVER THE INDIAN SOUTHERN REGION ANU SREE