Industrial Applications of Learning Control
|
|
|
- Jade Deborah O’Neal’
- 6 years ago
- Views:
Transcription

1 Where innovation starts Where innovation starts Industrial Applications of Learning Control Maarten Steinbuch Symposium on Learning Control at IEEE CDC 2009 Shanghai, China 1
 Philips Research & Philips AppTech ASML Eindhoven and Delft University of Technology People: Schootstra, Sperling, van Baars, Tousain, van de Wal, Bosgra,")
2 Focus and Background 1. Optical storage devices 2. Advanced Motion Systems (Wafer Scanners) Philips Research & Philips AppTech ASML Eindhoven and Delft University of Technology People: Schootstra, Sperling, van Baars, Tousain, van de Wal, Bosgra, Dijkstra, de Rover, van de Wijdeven, Oomen, Heertjes, Rotariu, Groot Wassink, Hennen, Witvoet, Merry, van Berkel, Steinbuch, and many MSc students 2
3 Optical Storage Case 1: Standard repetitive control Case 2: High Order repetitive control Case 3: Lifted ILC for reading cracked discs 3
4 4
, pp")
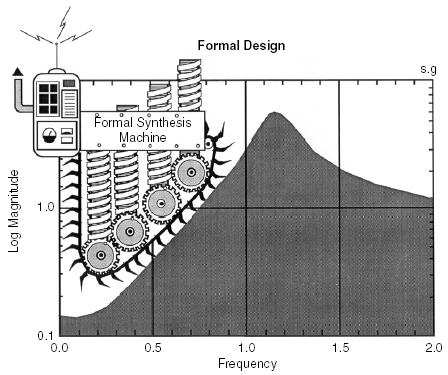
5 Gunter Stein s Bode Lecture, CDC 1989 IEEE Control Systems Magazine, 23 (2003), pp
6 how to cope with Bode sensitivity limitation? 0 log S( jω) dω = 0 6
7 7
8 Case 1: Standard repetitive control Nominal servo error signal 8
9 A Principles of repetitive control Introduction Periodic signal generator: memory loop 1 F K J K J F K J I = F A I 6 I I I I = F A I 6 I I I Magnitude (db) Frequency (Hz) 9
10 Standard repetitive control e + + z -N Q L z r + e - Repetitive Controller + z + C u P d + y L = learning filter: L = k T Q = robustness filter (low pass FIR filter) r 1 PC T = 1+ PC 10
11 Model CD-player system Frequency response of the cd-player system (radial tracking loop) 100 Magnitude [db] Phase [deg] Measured 6th order fit Frequency [Hz] 11
12 Open loop CD-player system Open loop frequency response (without repetitive controller) Magnitude (db) Phase (deg) Frequency (Hz) Frequency (Hz) 12
13 Learning filter Cd-player system Magnitude [db] Frequency response L-filter 1 L = T ZPETC Phase [deg] Frequency [Hz] 13
14 Robustness filter CD-player system Q = 200 th order 200 Hz, FIR 1 lowpass filter Frequency response Q-filter Linear phase: Magnitude [db] Q jω ( e ) = jqωts 1 D 23 (ω) e213 phase magnitude 0 Phase [deg] Frequency [Hz] 14

15 Standard repetitive control Servo only With repetitive 15
16 16
17 Case 2: High Order Repetitive Control Period +0.5% 17
18 High order repetitive control e z -N z -N z -N w p Q L z w 2 w 1 Open loop transfer function: M Infinite gain at repetitive frequency Constraint: p in wi z z p i= 1 ( z) = = p e w i in 1 wi z i= 1 i= 1 = 1 18
19 High Order Repetitive Control Period +0.5% With N=2 19
20 RC-TU/e References -1 M. Steinbuch, Repetitive control for systems with uncertain period-time, Automatica, 38(12), , (2002) M. Steinbuch, S. Weiland, T. Singh, Design of noise and period-time robust High Order Repetitive Control, with application to Optical Storage, Automatica, 43(12), , (2007) G. Schootstra, M. Steinbuch, Control system for a process that exhibits periodic disturbances, Patent: (1998) M. Steinbuch, G. Schootstra, Filter, repetitive control system and learning control system both provided with such filter, Patent: (1998) 20
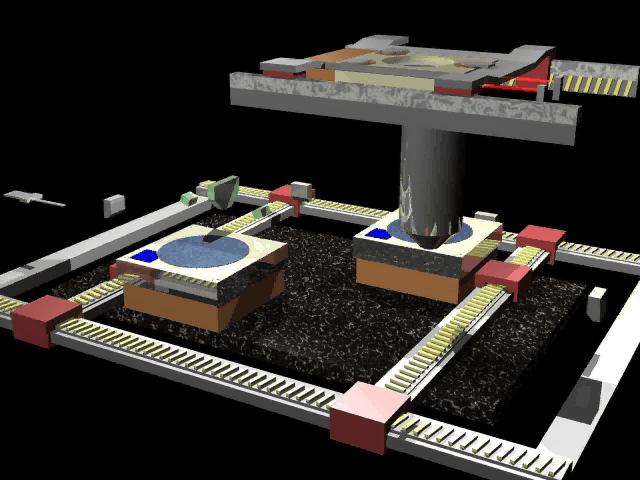
21 Case 3: Lifted ILC for reading cracked discs z outer edge x label side x: radial y: tangential z: focus laser beam y outer edge read-out side z y crack data spiral laser spot x 21

22 22
23 System description Optical drive Philips BD1 Motion system (lens & actuator) Approx. 2 nd order mass-spring-damper system Magnitude [db] Bode diagram: focus open loop y z sim meas x Feedback controller Tame PID with noise filter sim meas Phase [deg] Frequency [Hz] 23
24 24
25 ILC principles (1) Timing Hankel ILC Hankel ILC observation after actuation Tracking error unreliable observation For reading cracked discs: observe after crack actuate during crack Actuator input actuation crack interval Time 25
26 ILC principles (2) r drive γl f k J - + e k Learn feedforward Actuate plant E k z -1 E + I k+1 + e 0,k K Update trial states Obtain initial states controller 26
27 Application (1) Unreliable tracking error during crack Switch off feedback controller during crack. actuation in open feedback loop (o.l.) system observation in closed feedback loop (c.l.) system Reconstruct o.l. error from the observed c.l. error. A/D-conversion Aliasing Actuator saturation during observation, due to feedback control during actuation, due to feedforward control (ILC) 27
28 Applied learning loop r γ L f k D/A + e k J - S A/D S -1 drive with feedback loop switch g k ~J ε k E k E z -1 + I k+1 + ε 0, k e 0,k K 28
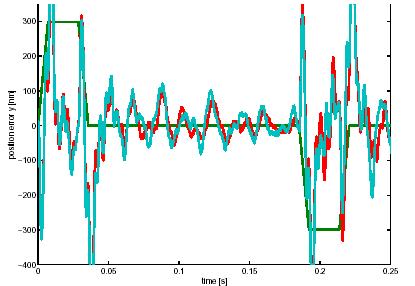
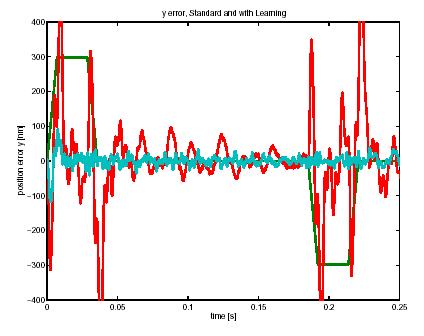
29 Measurement results (1) 29
30 Measurement results (2) 30
31 RC-TU/e References -2 M. Steinbuch, K. van Berkel, G. Leenknegt, T.A.E. Oomen, J.J.M. van de Wijdeven, Reading of Cracked Optical Discs Using Iterative Learning Control, in Proceedings of the 2009 American Control Conference; Saint Louis, MO, United States, , (2009) M. Steinbuch, J.J.M. van de Wijdeven, T.A.E. Oomen, K. van Berkel, G. Leenknegt, Recovering Data from Cracked Optical Discs using Hankel Iterative Learning Control, in Model-Based Control: Bridging Rigorous Theory and Advanced Technology; Editors: Paul M. J. Van den Hof, Carsten Scherer, and Peter S. C. Heuberger, , Springer, Book Chapter (2009) Further results from the group on repetitive: R.J.E. Merry, Performance driven control of nano-motion systems, PhD. Thesis, 2009, TU/e Advisors: M. Steinbuch, Co-advisor: M.J.G. van de Molengraft R.J.E. Merry, D.J. Kessels, M.J.G. van de Molengraft, M. Steinbuch, Repetitive control applied to a walking piezo actuator, in International Conference on Control & Automation; Christchurch, New Zealand, 6 pages, (2009) D. de Roover, O.H. Bosgra, M. Steinbuch, Internal model based design of repetitive and iterative learning controllers for linear multivariable systems, Int. J. of Control, 73(10), , (2000) 31
32 Advanced Motion Systems (wafer scanners) Case 1: Standard ILC Case 2: Varying Setpoints 32

33 IBM Power PC: the interconnect complexity, Polygate 0.12 um Source: ICE 33
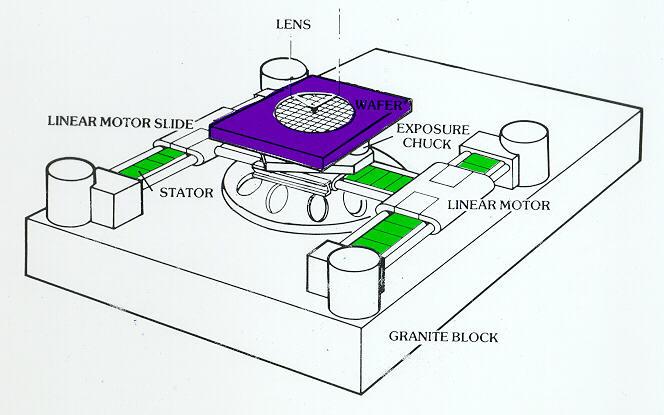
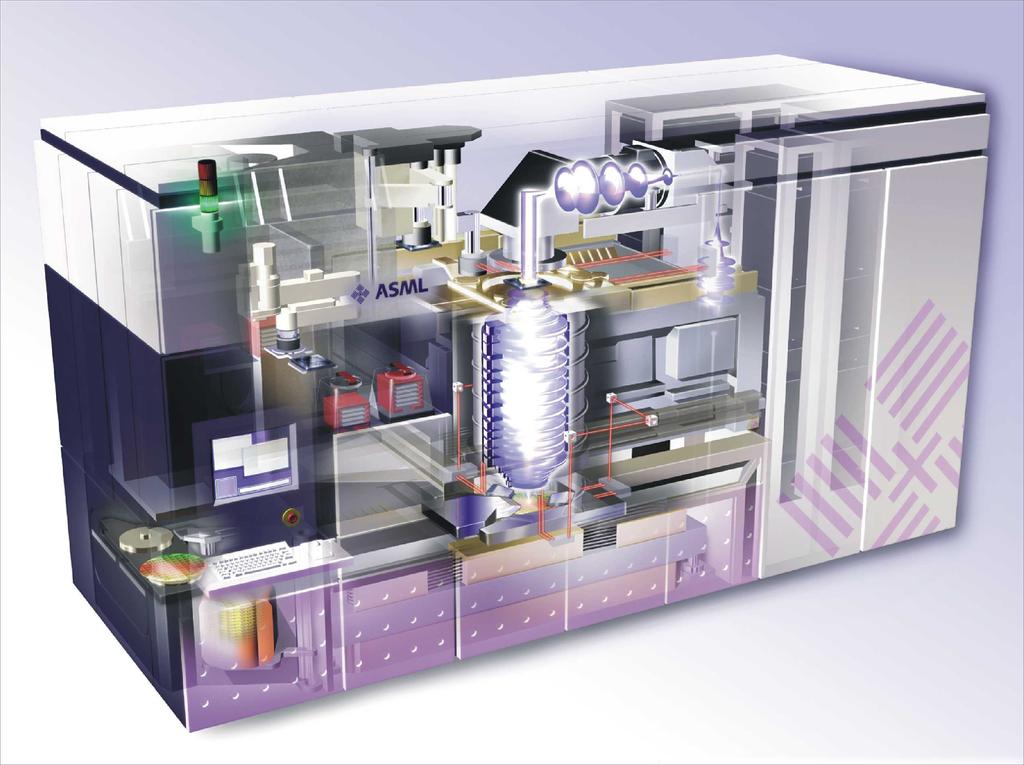
34 Global layout lithography tool Light source + light shaping Reticle for pattern generation Lens for 4:1 reduction image of the reticle to the wafer Wafer on wafer stage 34
35 35
36 36
37 37
38 38
39 39
40 Case 1: Standard Iterative Learning Control (ILC) Q ( 1 L PS ) < 1 40
41 41
42 42
43 43
44 44
45 45
46 LPS 46
47 47
48 48
49 49
50 Illustration of finite time problem ILC - trajectories 50
51 ILC - error trial 1 51
52 ILC - error trial 1 (zoom in) 52

53 ILC - error trial 6 53
54 ILC - feedforward trial 6 54
55 ILC design procedure Define repeating tasks Pick-place actions Motion scans Portions of scans! acc time Essential question: What is the nature of the repeating disturbance? (compare e.g. the nature of a setpoint disturbance vs. cogging) time time 55
56 ILC design procedure (ctd.) Define the control and observation window Ncont (Motion stage example) Nobs Ncont=250, Nobs=450 (samples) 56


57 Lifted system time weight ILC I 0 W1 = 0 0 W = 0 I Time weights! yˆref H 2 Iterative Learning Controller xˆk W W1 H eˆk 57
58 Input ILC error trial 1 58
59 Input ILC error trial 5 59
60 Input ILC feedforward trial 5 60
61 ILC-TU/e References - 1 J.J.M. van de Wijdeven, M.C.F. Donkers, O.H. Bosgra, Iterative Learning Control for uncertain systems: Robust monotonic convergence analysis, Automatica, 46(tbd), accepted, (2010) J.J.M. van de Wijdeven, O.H. Bosgra, Using basis functions in Iterative Learning Control: Analysis and design theory, Int. J. of Control, 83(tbd), accepted, (2010) T.A.E. Oomen, J.J.M. van de Wijdeven, O.H. Bosgra, Suppressing Intersample Behavior in Iterative Learning Control, Automatica, 45(4), , (2009) I. Rotariu, M. Steinbuch, R.M.L. Ellenbroek, Adaptive Iterative Learning Control for high precision motion systems, IEEE Trans. on Control Systems Techn., 16(5), , (2008) S.H. van der Meulen, R.L. Tousain, O.H. Bosgra, Fixed Structure Feedforward Controller Design Exploiting Iterative Trials: Application to a Wafer Stage and a Desktop Printer, J. Dynamic Systems, Measurement and Control, 130(5), , (2008) R.J.E. Merry, M.J.G. van de Molengraft, M. Steinbuch, Iterative learning control with wavelet filtering, Int. J. of Robust and Nonlinear Control, 18(10), , (2008) 61
62 ILC-TU/e References - 2 J.J.M. van de Wijdeven, O.H. Bosgra, Residual vibration suppression using Hankel Iterative Learning Control, Int. J. of Robust and Nonlinear Control, 18(10), , (2008) O.H. Bosgra, Book Review: Multivariable Feedback Control - Analysis and Design, Skogestad & Postlethwaite, IEEE Control Systems Magazine, 27(1), 80-81, (2007) B.H.M. Bukkems, D. Kostic, A.G. de Jager, M. Steinbuch, Learning-Based Identification and Iterative Learning Control of Direct-Drive Robots, IEEE Trans. on Control Systems Techn., 13(4), , (2005) J.J.M.van de Wijdeven, Iterative Learning Control design for uncertain and time-windowed systems, PhD. Thesis, 2008, TU/e Advisors: O.H. Bosgra, M. Steinbuch I. Rotariu, R.M.L. Ellenbroek, M. Steinbuch, G.E. van Baars, Method of adaptive interactice learning control and Apparatus employing such a methodol and a Lithographic Manufacturing, Patent: (2005) I. Rotariu, R.M.L. Ellenbroek, M. Steinbuch, G.E. van Baars, Method of Adaptive Iterative Learning Contr Process and Apparatus employing such a methodol and a Lithographic Manufacturing, Patent: (2004) 62
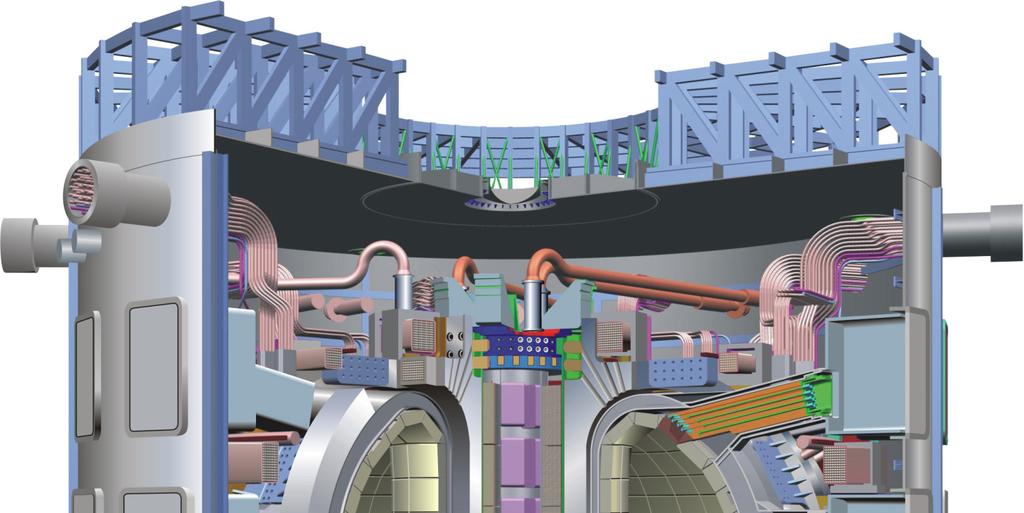
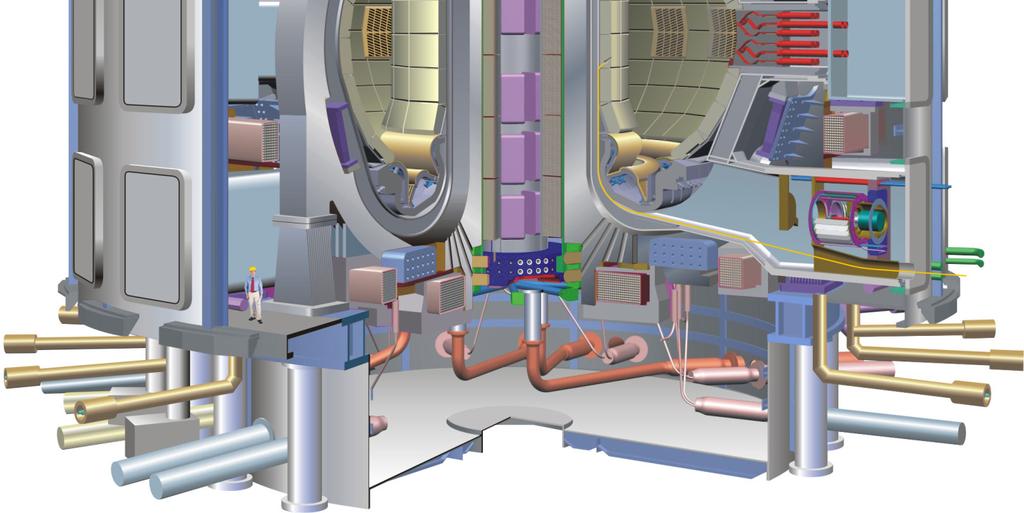
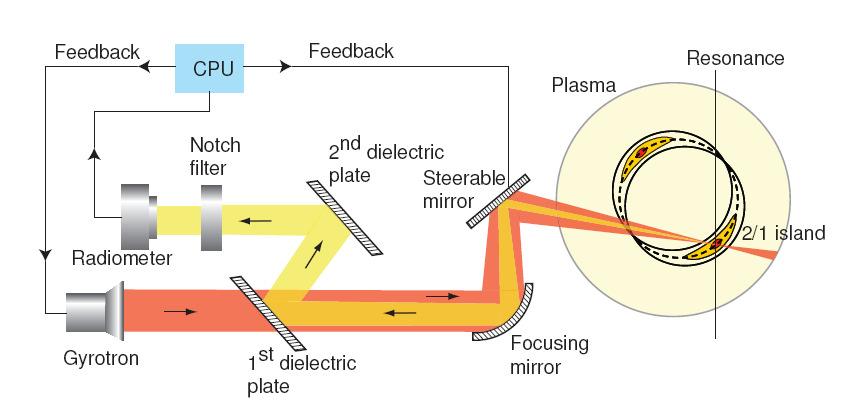
63 Recent work/other applications ILC for a UHP Lamp (Philips Lighting) power electronics inkjet printing piezo actuator paper handling in printing actuation for repeated scanning for calibration AFMs MHD control in burning plasma (nuclear fusion) 63
64 64
65 65

66 66
67 Future Challenges Computational issues LPV type systems Relation with identification Robustness and many other applications 67
68 Thank you for the attention! 68
Current feedback for shock disturbance attenuation in a compact disc player
 Proceedings of the 2000 IEEE International Conference on Control Applications WP1-5 4:40 Anchorage, Alaska, USA September 25-27, 2000 Current feedback for shock disturbance attenuation in a compact disc
Proceedings of the 2000 IEEE International Conference on Control Applications WP1-5 4:40 Anchorage, Alaska, USA September 25-27, 2000 Current feedback for shock disturbance attenuation in a compact disc
Motion Control Tuning. Motion Control Tuning overview (v2.1) Adrian M. Rankers
 Adrian M. Rankers") Motion Control Tuning Contents Mechatronics Training Curriculum Details of Course Motion Control Tuning Mechatronics Training Curriculum Premium Workshop Mechatronics System Design Advanced Advanced Motion
Motion Control Tuning Contents Mechatronics Training Curriculum Details of Course Motion Control Tuning Mechatronics Training Curriculum Premium Workshop Mechatronics System Design Advanced Advanced Motion
Chapter 2 Mechatronics Disrupted
 Chapter 2 Mechatronics Disrupted Maarten Steinbuch 2.1 How It Started The field of mechatronics started in the 1970s when mechanical systems needed more accurate controlled motions. This forced both industry
Chapter 2 Mechatronics Disrupted Maarten Steinbuch 2.1 How It Started The field of mechatronics started in the 1970s when mechanical systems needed more accurate controlled motions. This forced both industry
MIMO-LTI Feedback Controller Design -Status report-
 MIMO-LTI Feedback Controller Design -Status report- Christian Schmidt Deutsches Elektronen Synchrotron Technische Universitaet Hamburg Harburg FLASH Seminar 4/1/28 Outline Current RF Feedback System MIMO
MIMO-LTI Feedback Controller Design -Status report- Christian Schmidt Deutsches Elektronen Synchrotron Technische Universitaet Hamburg Harburg FLASH Seminar 4/1/28 Outline Current RF Feedback System MIMO
Optimized Tuning of PI Controller for a Spherical Tank Level System Using New Modified Repetitive Control Strategy
 International Journal of Engineering Research and Development e-issn: 2278-67X, p-issn: 2278-8X, www.ijerd.com Volume 3, Issue 6 (September 212), PP. 74-82 Optimized Tuning of PI Controller for a Spherical
International Journal of Engineering Research and Development e-issn: 2278-67X, p-issn: 2278-8X, www.ijerd.com Volume 3, Issue 6 (September 212), PP. 74-82 Optimized Tuning of PI Controller for a Spherical
Tracking Position Control of AC Servo Motor Using Enhanced Iterative Learning Control Strategy
 International Journal of Engineering Research and Development e-issn: 2278-67X, p-issn: 2278-8X, www.ijerd.com Volume 3, Issue 6 (September 212), PP. 26-33 Tracking Position Control of AC Servo Motor Using
International Journal of Engineering Research and Development e-issn: 2278-67X, p-issn: 2278-8X, www.ijerd.com Volume 3, Issue 6 (September 212), PP. 26-33 Tracking Position Control of AC Servo Motor Using
Using Frequency-weighted data fusion to improve performance of digital charge amplifier
 Using Frequency-weighted data fusion to improve performance of digital charge amplifier M. Bazghaleh, S. Grainger, B. Cazzolato and T. Lu Abstract Piezoelectric actuators are the most common among a variety
Using Frequency-weighted data fusion to improve performance of digital charge amplifier M. Bazghaleh, S. Grainger, B. Cazzolato and T. Lu Abstract Piezoelectric actuators are the most common among a variety
Study on Repetitive PID Control of Linear Motor in Wafer Stage of Lithography
 Available online at www.sciencedirect.com Procedia Engineering 9 (01) 3863 3867 01 International Workshop on Information and Electronics Engineering (IWIEE) Study on Repetitive PID Control of Linear Motor
Available online at www.sciencedirect.com Procedia Engineering 9 (01) 3863 3867 01 International Workshop on Information and Electronics Engineering (IWIEE) Study on Repetitive PID Control of Linear Motor
ROBUST SERVO CONTROL DESIGN USING THE H /µ METHOD 1
 PERIODICA POLYTECHNICA SER. TRANSP. ENG. VOL. 27, NO. 1 2, PP. 3 16 (1999) ROBUST SERVO CONTROL DESIGN USING THE H /µ METHOD 1 István SZÁSZI and Péter GÁSPÁR Technical University of Budapest Műegyetem
PERIODICA POLYTECHNICA SER. TRANSP. ENG. VOL. 27, NO. 1 2, PP. 3 16 (1999) ROBUST SERVO CONTROL DESIGN USING THE H /µ METHOD 1 István SZÁSZI and Péter GÁSPÁR Technical University of Budapest Műegyetem
Rapid and precise control of a micro-manipulation stage combining H with ILC algorithm
 Rapid and precise control of a micro-manipulation stage combining H with ILC algorithm *Jie Ling 1 and Xiaohui Xiao 1, School of Power and Mechanical Engineering, WHU, Wuhan, China xhxiao@whu.edu.cn ABSTRACT
Rapid and precise control of a micro-manipulation stage combining H with ILC algorithm *Jie Ling 1 and Xiaohui Xiao 1, School of Power and Mechanical Engineering, WHU, Wuhan, China xhxiao@whu.edu.cn ABSTRACT
Robust mass damper design for bandwidth increase of motion stages Verbaan, C.A.M.
 Robust mass damper design for bandwidth increase of motion stages Verbaan, C.A.M. Published: 20/04/2015 Document Version Publisher s PDF, also known as Version of Record (includes final page, issue and
Robust mass damper design for bandwidth increase of motion stages Verbaan, C.A.M. Published: 20/04/2015 Document Version Publisher s PDF, also known as Version of Record (includes final page, issue and
Cavity Field Control - Feedback Performance and Stability Analysis. LLRF Lecture Part3.2 S. Simrock, Z. Geng DESY, Hamburg, Germany
 Cavity Field Control - Feedback Performance and Stability Analysis LLRF Lecture Part3.2 S. Simrock, Z. Geng DESY, Hamburg, Germany Motivation Understand how the perturbations and noises influence the feedback
Cavity Field Control - Feedback Performance and Stability Analysis LLRF Lecture Part3.2 S. Simrock, Z. Geng DESY, Hamburg, Germany Motivation Understand how the perturbations and noises influence the feedback
Implementation of Self-adaptive System using the Algorithm of Neural Network Learning Gain
 International Journal Implementation of Control, of Automation, Self-adaptive and System Systems, using vol. the 6, Algorithm no. 3, pp. of 453-459, Neural Network June 2008 Learning Gain 453 Implementation
International Journal Implementation of Control, of Automation, Self-adaptive and System Systems, using vol. the 6, Algorithm no. 3, pp. of 453-459, Neural Network June 2008 Learning Gain 453 Implementation
ITERATIVE learning control (ILC) is very effective to improve
 is very effective to improve") IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART B: CYBERNETICS, VOL 35, NO 1, FEBRUARY 2005 107 Wavelet Transform-Based Frequency Tuning ILC Bin Zhang, Student Member, IEEE, Danwei Wang, Member,
IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART B: CYBERNETICS, VOL 35, NO 1, FEBRUARY 2005 107 Wavelet Transform-Based Frequency Tuning ILC Bin Zhang, Student Member, IEEE, Danwei Wang, Member,
CDS 110 L10.2: Motion Control Systems. Motion Control Systems
 CDS, Lecture.2 4 Dec 2 R. M. Murray, Caltech CDS CDS L.2: Motion Control Systems Richard M. Murray 4 December 22 Announcements Final exam available at 3 pm (during break); due 5 pm, Friday, 3 Dec 2 Outline:
CDS, Lecture.2 4 Dec 2 R. M. Murray, Caltech CDS CDS L.2: Motion Control Systems Richard M. Murray 4 December 22 Announcements Final exam available at 3 pm (during break); due 5 pm, Friday, 3 Dec 2 Outline:
Intelligent Learning Control Strategies for Position Tracking of AC Servomotor
 Intelligent Learning Control Strategies for Position Tracking of AC Servomotor M.Vijayakarthick 1 1Assistant Professor& Department of Electronics and Instrumentation Engineering, Annamalai University,
Intelligent Learning Control Strategies for Position Tracking of AC Servomotor M.Vijayakarthick 1 1Assistant Professor& Department of Electronics and Instrumentation Engineering, Annamalai University,
Feedback control of ECRH for MHD mode stabilization on TEXTOR
 -Institute for Plasma Physics Rijnhuizen Association Euratom- Feedback control of ECRH for MHD mode stabilization on TEXTOR Bart Hennen Tuesday, 25 November, 28 With contributions from: E. Westerhof, M.
-Institute for Plasma Physics Rijnhuizen Association Euratom- Feedback control of ECRH for MHD mode stabilization on TEXTOR Bart Hennen Tuesday, 25 November, 28 With contributions from: E. Westerhof, M.
µ Control of a High Speed Spindle Thrust Magnetic Bearing
 µ Control of a High Speed Spindle Thrust Magnetic Bearing Roger L. Fittro* Lecturer Carl R. Knospe** Associate Professor * Aston University, Birmingham, England, ** University of Virginia, Department of
µ Control of a High Speed Spindle Thrust Magnetic Bearing Roger L. Fittro* Lecturer Carl R. Knospe** Associate Professor * Aston University, Birmingham, England, ** University of Virginia, Department of
The Informal Nature of Systems Engineering
 Abstract by Gerrit Muller University of South-Eastern Norway-NISE e-mail: gaudisite@gmail.com www.gaudisite.nl The Systems Engineering (SE) discipline is an integrating discipline. SE integrates and guides
Abstract by Gerrit Muller University of South-Eastern Norway-NISE e-mail: gaudisite@gmail.com www.gaudisite.nl The Systems Engineering (SE) discipline is an integrating discipline. SE integrates and guides
Active structural acoustic control of rotating machinery using an active bearing
 Active structural acoustic control of rotating machinery using an active bearing S. Devos 1, B. Stallaert 2, G. Pinte 1, W. Symens 1, P. Sas 2, J. Swevers 2 1 Flanders MECHATRONICS Technology Centre Celestijnenlaan
Active structural acoustic control of rotating machinery using an active bearing S. Devos 1, B. Stallaert 2, G. Pinte 1, W. Symens 1, P. Sas 2, J. Swevers 2 1 Flanders MECHATRONICS Technology Centre Celestijnenlaan
ME 5281 Fall Homework 8 Due: Wed. Nov. 4th; start of class.
 ME 5281 Fall 215 Homework 8 Due: Wed. Nov. 4th; start of class. Reading: Chapter 1 Part A: Warm Up Problems w/ Solutions (graded 4%): A.1 Non-Minimum Phase Consider the following variations of a system:
ME 5281 Fall 215 Homework 8 Due: Wed. Nov. 4th; start of class. Reading: Chapter 1 Part A: Warm Up Problems w/ Solutions (graded 4%): A.1 Non-Minimum Phase Consider the following variations of a system:
BAXTER O'TULLE 132 Horace Ave Gordonville, KY (555)
") BAXTER O'TULLE 132 Horace Ave Gordonville, KY 93555 (555) 555-2938 botulle@emailplace.com RESEARCH INTERESTS Automation Distribute Systems Control Decentralization Control Mechantronics and Artificial
BAXTER O'TULLE 132 Horace Ave Gordonville, KY 93555 (555) 555-2938 botulle@emailplace.com RESEARCH INTERESTS Automation Distribute Systems Control Decentralization Control Mechantronics and Artificial
Adaptive Control of a MEMS Steering Mirror for Suppression of Laser Beam Jitter
 25 American Control Conference June 8-1, 25. Portland, OR, USA FrA6.3 Adaptive Control of a MEMS Steering Mirror for Suppression of Laser Beam Jitter Néstor O. Pérez Arancibia, Neil Chen, Steve Gibson,
25 American Control Conference June 8-1, 25. Portland, OR, USA FrA6.3 Adaptive Control of a MEMS Steering Mirror for Suppression of Laser Beam Jitter Néstor O. Pérez Arancibia, Neil Chen, Steve Gibson,
Annual Report Dynamics and Control Technology Group 1. Department of Mechanical Engineering Eindhoven University of Technology The Netherlands
 Annual Report 2007 Dynamics and Control Technology Group 1 Department of Mechanical Engineering Eindhoven University of Technology The Netherlands Report 2008.001 Address Lia Neervoort/Petra Aspers Eindhoven
Annual Report 2007 Dynamics and Control Technology Group 1 Department of Mechanical Engineering Eindhoven University of Technology The Netherlands Report 2008.001 Address Lia Neervoort/Petra Aspers Eindhoven
Real-time Systems in Tokamak Devices. A case study: the JET Tokamak May 25, 2010
 Real-time Systems in Tokamak Devices. A case study: the JET Tokamak May 25, 2010 May 25, 2010-17 th Real-Time Conference, Lisbon 1 D. Alves 2 T. Bellizio 1 R. Felton 3 A. C. Neto 2 F. Sartori 4 R. Vitelli
Real-time Systems in Tokamak Devices. A case study: the JET Tokamak May 25, 2010 May 25, 2010-17 th Real-Time Conference, Lisbon 1 D. Alves 2 T. Bellizio 1 R. Felton 3 A. C. Neto 2 F. Sartori 4 R. Vitelli
AFM Analysis of HD-DVD Stampers
 AFM Analysis of HD-DVD Stampers Donald A. Chernoff and David L. Burkhead Advanced Surface Microscopy Inc. Indianapolis, IN USA www.asmicro.com Dick Verhaartand Ton van de Vorst Singulus Mastering BV Eindhoven,
AFM Analysis of HD-DVD Stampers Donald A. Chernoff and David L. Burkhead Advanced Surface Microscopy Inc. Indianapolis, IN USA www.asmicro.com Dick Verhaartand Ton van de Vorst Singulus Mastering BV Eindhoven,
PD-Type Iterative Learning Control for the Trajectory Tracking of a Pneumatic X-Y Table with Disturbances
 520 PD-Type Iterative Learning Control for the Trajectory Tracking of a Pneumatic X-Y Table with Disturbances Chih-Keng CHEN and James HWANG In this paper, a proportional-valve controlled pneumatic X-Y
520 PD-Type Iterative Learning Control for the Trajectory Tracking of a Pneumatic X-Y Table with Disturbances Chih-Keng CHEN and James HWANG In this paper, a proportional-valve controlled pneumatic X-Y
OPTICS IN MOTION. Introduction: Competing Technologies: 1 of 6 3/18/2012 6:27 PM.
 1 of 6 3/18/2012 6:27 PM OPTICS IN MOTION STANDARD AND CUSTOM FAST STEERING MIRRORS Home Products Contact Tutorial Navigate Our Site 1) Laser Beam Stabilization to design and build a custom 3.5 x 5 inch,
1 of 6 3/18/2012 6:27 PM OPTICS IN MOTION STANDARD AND CUSTOM FAST STEERING MIRRORS Home Products Contact Tutorial Navigate Our Site 1) Laser Beam Stabilization to design and build a custom 3.5 x 5 inch,
TechUnited Team Description
 TechUnited Team Description J. G. Goorden 1, P.P. Jonker 2 (eds.) 1 Eindhoven University of Technology, PO Box 513, 5600 MB Eindhoven 2 Delft University of Technology, PO Box 5, 2600 AA Delft The Netherlands
TechUnited Team Description J. G. Goorden 1, P.P. Jonker 2 (eds.) 1 Eindhoven University of Technology, PO Box 513, 5600 MB Eindhoven 2 Delft University of Technology, PO Box 5, 2600 AA Delft The Netherlands
4F3 - Predictive Control
 4F3 Predictive Control - Lecture 1 p. 1/13 4F3 - Predictive Control Lecture 1 - Introduction to Predictive Control Jan Maciejowski jmm@eng.cam.ac.uk http://www-control.eng.cam.ac.uk/homepage/officialweb.php?id=1
4F3 Predictive Control - Lecture 1 p. 1/13 4F3 - Predictive Control Lecture 1 - Introduction to Predictive Control Jan Maciejowski jmm@eng.cam.ac.uk http://www-control.eng.cam.ac.uk/homepage/officialweb.php?id=1
APPLICATION OF MULTIVARIABLE CONTROL DESIGN TO DUAL-MODE DIGITAL VERSATILE DISC DRIVE
 Asian Journal of Control, Vol., No. 3, pp. 4-11, September 4 APPLICATION OF MULTIVARIABLE CONTROL DESIGN TO DUAL-MODE DIGITAL VERSATILE DISC DRIVE Myoung Soo Park, Hee Soo Lee, Seung-Ho Kim, Il-Yeong Roh
Asian Journal of Control, Vol., No. 3, pp. 4-11, September 4 APPLICATION OF MULTIVARIABLE CONTROL DESIGN TO DUAL-MODE DIGITAL VERSATILE DISC DRIVE Myoung Soo Park, Hee Soo Lee, Seung-Ho Kim, Il-Yeong Roh
ACTIVE VIBRATION CONTROL OF HARD-DISK DRIVES USING PZT ACTUATED SUSPENSION SYSTEMS. Meng-Shiun Tsai, Wei-Hsiung Yuan and Jia-Ming Chang
 ICSV14 Cairns Australia 9-12 July, 27 ACTIVE VIBRATION CONTROL OF HARD-DISK DRIVES USING PZT ACTUATED SUSPENSION SYSTEMS Abstract Meng-Shiun Tsai, Wei-Hsiung Yuan and Jia-Ming Chang Department of Mechanical
ICSV14 Cairns Australia 9-12 July, 27 ACTIVE VIBRATION CONTROL OF HARD-DISK DRIVES USING PZT ACTUATED SUSPENSION SYSTEMS Abstract Meng-Shiun Tsai, Wei-Hsiung Yuan and Jia-Ming Chang Department of Mechanical
DISCRETE-TIME PHASE COMPENSATED REPETITIVE CONTROL FOR PIEZOACTUATORS IN SCANNING PROBE MICROSCOPES
 Proceedings of DSCC28 28 ASME Dynamic Systems and Control Conference October 2-22, 28, Ann Arbor, Michigan, USA DSCC28-2283 DISCRETE-TIME PHASE COMPENSATED REPETITIVE CONTROL FOR PIEZOACTUATORS IN SCANNING
Proceedings of DSCC28 28 ASME Dynamic Systems and Control Conference October 2-22, 28, Ann Arbor, Michigan, USA DSCC28-2283 DISCRETE-TIME PHASE COMPENSATED REPETITIVE CONTROL FOR PIEZOACTUATORS IN SCANNING
Prediction error identification with rank-reduced output noise
 Prediction error identification with rank-reduced output noise Paul M.J. Van den Hof with Harm Weerts (TU/e) and Arne Dankers (Calgary) 2017 American Control Conference, Seattle, WA, 24 May 2017 Introduction
Prediction error identification with rank-reduced output noise Paul M.J. Van den Hof with Harm Weerts (TU/e) and Arne Dankers (Calgary) 2017 American Control Conference, Seattle, WA, 24 May 2017 Introduction
How to do the Thermal Noise Lab. And also your DNA melting lab report
 How to do the Thermal Noise Lab And also your DNA melting lab report Agenda for our Theory Free Day How to put away your DNA melting apparatus DNA melting lab report The teaching AFM Tips for the thermal
How to do the Thermal Noise Lab And also your DNA melting lab report Agenda for our Theory Free Day How to put away your DNA melting apparatus DNA melting lab report The teaching AFM Tips for the thermal
Time localisation of surface defects on optical discs
 Time localisation of surface defects on optical discs P.F. Odgaard M.V. Wickerhauser Department of Control Engineering Department of Mathematics Frederik Bajersvej 7C One Brookings Drive Aalborg University
Time localisation of surface defects on optical discs P.F. Odgaard M.V. Wickerhauser Department of Control Engineering Department of Mathematics Frederik Bajersvej 7C One Brookings Drive Aalborg University
Magnetic Levitation System
 Introduction Magnetic Levitation System There are two experiments in this lab. The first experiment studies system nonlinear characteristics, and the second experiment studies system dynamic characteristics
Introduction Magnetic Levitation System There are two experiments in this lab. The first experiment studies system nonlinear characteristics, and the second experiment studies system dynamic characteristics
CDS 101/110a: Lecture 8-1 Frequency Domain Design
 CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
Servo Loop Bandwidth, Motor Sizing and Power Dissipation. Mark Holcomb Senior Engineer, Motion Control Specialist Celera Motion
 Servo Loop Bandwidth, Motor Sizing and Power Dissipation Mark Holcomb Senior Engineer, Motion Control Specialist Celera Motion Professional Background University of Buffalo, 1994 MS ME Active Systems product
Servo Loop Bandwidth, Motor Sizing and Power Dissipation Mark Holcomb Senior Engineer, Motion Control Specialist Celera Motion Professional Background University of Buffalo, 1994 MS ME Active Systems product
TRACK-FOLLOWING CONTROLLER FOR HARD DISK DRIVE ACTUATOR USING QUANTITATIVE FEEDBACK THEORY
 Proceedings of the IASTED International Conference Modelling, Identification and Control (AsiaMIC 2013) April 10-12, 2013 Phuket, Thailand TRACK-FOLLOWING CONTROLLER FOR HARD DISK DRIVE ACTUATOR USING
Proceedings of the IASTED International Conference Modelling, Identification and Control (AsiaMIC 2013) April 10-12, 2013 Phuket, Thailand TRACK-FOLLOWING CONTROLLER FOR HARD DISK DRIVE ACTUATOR USING
Adaptive Control of a Tilt Mirror for Laser Beam Steering*
 Adaptive Control of a Tilt Mirror for Laser Beam Steering* ByungSub Kim Intelligence and Precision Machine Department Korea Institute of Machinery and Materials Daejeon, 35343, Korea bkim@kimm.re.kr Steve
Adaptive Control of a Tilt Mirror for Laser Beam Steering* ByungSub Kim Intelligence and Precision Machine Department Korea Institute of Machinery and Materials Daejeon, 35343, Korea bkim@kimm.re.kr Steve
2.7.3 Measurement noise. Signal variance
 62 Finn Haugen: PID Control Figure 2.34: Example 2.15: Temperature control without anti wind-up disturbance has changed back to its normal value). [End of Example 2.15] 2.7.3 Measurement noise. Signal
62 Finn Haugen: PID Control Figure 2.34: Example 2.15: Temperature control without anti wind-up disturbance has changed back to its normal value). [End of Example 2.15] 2.7.3 Measurement noise. Signal
Chapter 5. Tracking system with MEMS mirror
 Chapter 5 Tracking system with MEMS mirror Up to now, this project has dealt with the theoretical optimization of the tracking servo with MEMS mirror through the use of simulation models. For these models
Chapter 5 Tracking system with MEMS mirror Up to now, this project has dealt with the theoretical optimization of the tracking servo with MEMS mirror through the use of simulation models. For these models
Visual Servoing. Charlie Kemp. 4632B/8803 Mobile Manipulation Lecture 8
 Visual Servoing Charlie Kemp 4632B/8803 Mobile Manipulation Lecture 8 From: http://www.hsi.gatech.edu/visitors/maps/ 4 th floor 4100Q M Building 167 First office on HSI side From: http://www.hsi.gatech.edu/visitors/maps/
Visual Servoing Charlie Kemp 4632B/8803 Mobile Manipulation Lecture 8 From: http://www.hsi.gatech.edu/visitors/maps/ 4 th floor 4100Q M Building 167 First office on HSI side From: http://www.hsi.gatech.edu/visitors/maps/
Adaptive Inverse Control with IMC Structure Implementation on Robotic Arm Manipulator
 Adaptive Inverse Control with IMC Structure Implementation on Robotic Arm Manipulator Khalid M. Al-Zahrani echnical Support Unit erminal Department, Saudi Aramco P.O. Box 94 (Najmah), Ras anura, Saudi
Adaptive Inverse Control with IMC Structure Implementation on Robotic Arm Manipulator Khalid M. Al-Zahrani echnical Support Unit erminal Department, Saudi Aramco P.O. Box 94 (Najmah), Ras anura, Saudi
CHASSIS DYNAMOMETER TORQUE CONTROL SYSTEM DESIGN BY DIRECT INVERSE COMPENSATION. C.Matthews, P.Dickinson, A.T.Shenton
 CHASSIS DYNAMOMETER TORQUE CONTROL SYSTEM DESIGN BY DIRECT INVERSE COMPENSATION C.Matthews, P.Dickinson, A.T.Shenton Department of Engineering, The University of Liverpool, Liverpool L69 3GH, UK Abstract:
CHASSIS DYNAMOMETER TORQUE CONTROL SYSTEM DESIGN BY DIRECT INVERSE COMPENSATION C.Matthews, P.Dickinson, A.T.Shenton Department of Engineering, The University of Liverpool, Liverpool L69 3GH, UK Abstract:
Classical Control Design Guidelines & Tools (L10.2) Transfer Functions
 Transfer Functions") Classical Control Design Guidelines & Tools (L10.2) Douglas G. MacMartin Summarize frequency domain control design guidelines and approach Dec 4, 2013 D. G. MacMartin CDS 110a, 2013 1 Transfer Functions
Classical Control Design Guidelines & Tools (L10.2) Douglas G. MacMartin Summarize frequency domain control design guidelines and approach Dec 4, 2013 D. G. MacMartin CDS 110a, 2013 1 Transfer Functions
GAIN-SCHEDULED CONTROL FOR UNMODELED SUBSYSTEM DYNAMICS. Stephen J. Fedigan 1 Carl R. Knospe 2
 GAIN-SCHEDULED CONTROL FOR UNMODELED SUBSYSTEM DYNAMICS Stephen J. Fedigan 1 Carl R. Knospe 2 1 DSP Solutions R&D Center, Control Systems Branch, Texas Instruments, Inc. M/S 8368, P.O. Box 655303, Dallas,
GAIN-SCHEDULED CONTROL FOR UNMODELED SUBSYSTEM DYNAMICS Stephen J. Fedigan 1 Carl R. Knospe 2 1 DSP Solutions R&D Center, Control Systems Branch, Texas Instruments, Inc. M/S 8368, P.O. Box 655303, Dallas,
Disturbance Rejection Using Self-Tuning ARMARKOV Adaptive Control with Simultaneous Identification
 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 9, NO. 1, JANUARY 2001 101 Disturbance Rejection Using Self-Tuning ARMARKOV Adaptive Control with Simultaneous Identification Harshad S. Sane, Ravinder
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 9, NO. 1, JANUARY 2001 101 Disturbance Rejection Using Self-Tuning ARMARKOV Adaptive Control with Simultaneous Identification Harshad S. Sane, Ravinder
Development of a Low-order Adaptive Optics System at Udaipur Solar Observatory
 J. Astrophys. Astr. (2008) 29, 353 357 Development of a Low-order Adaptive Optics System at Udaipur Solar Observatory A. R. Bayanna, B. Kumar, R. E. Louis, P. Venkatakrishnan & S. K. Mathew Udaipur Solar
J. Astrophys. Astr. (2008) 29, 353 357 Development of a Low-order Adaptive Optics System at Udaipur Solar Observatory A. R. Bayanna, B. Kumar, R. E. Louis, P. Venkatakrishnan & S. K. Mathew Udaipur Solar
Digital Signal Processing in RF Applications
 Digital Signal Processing in RF Applications Part II Thomas Schilcher Outline 1. signal conditioning / down conversion 2. detection of amp./phase by digital I/Q sampling I/Q sampling non I/Q sampling digital
Digital Signal Processing in RF Applications Part II Thomas Schilcher Outline 1. signal conditioning / down conversion 2. detection of amp./phase by digital I/Q sampling I/Q sampling non I/Q sampling digital
H loop shaping design for nano-positioning
 H loop shaping design for nano-positioning Abu Sebastian 1, Srinivasa Salapaka 2 1 abuseb@iastate.edu, 2 svasu@mit.edu Department of Electrical and Computer Engineering, Iowa State University, Ames, IA
H loop shaping design for nano-positioning Abu Sebastian 1, Srinivasa Salapaka 2 1 abuseb@iastate.edu, 2 svasu@mit.edu Department of Electrical and Computer Engineering, Iowa State University, Ames, IA
POSITION TRACKING PERFORMANCE OF AC SERVOMOTOR BASED ON NEW MODIFIED REPETITIVE CONTROL STRATEGY
 www.arpapress.com/volumes/vol10issue1/ijrras_10_1_16.pdf POSITION TRACKING PERFORMANCE OF AC SERVOMOTOR BASED ON NEW MODIFIED REPETITIVE CONTROL STRATEGY M. Vijayakarthick 1 & P.K. Bhaba 2 1 Department
www.arpapress.com/volumes/vol10issue1/ijrras_10_1_16.pdf POSITION TRACKING PERFORMANCE OF AC SERVOMOTOR BASED ON NEW MODIFIED REPETITIVE CONTROL STRATEGY M. Vijayakarthick 1 & P.K. Bhaba 2 1 Department
H Multi-objective and Multi-Model MIMO control design for Broadband noise attenuation in a 3D enclosure
 H Multi-objective and Multi-Model MIMO control design for Broadband noise attenuation in a 3D enclosure Paul LOISEAU, Philippe CHEVREL, Mohamed YAGOUBI, Jean-Marc DUFFAL Mines Nantes, IRCCyN & Renault
H Multi-objective and Multi-Model MIMO control design for Broadband noise attenuation in a 3D enclosure Paul LOISEAU, Philippe CHEVREL, Mohamed YAGOUBI, Jean-Marc DUFFAL Mines Nantes, IRCCyN & Renault
Part 5-1: Lithography
 Part 5-1: Lithography Yao-Joe Yang 1 Pattern Transfer (Patterning) Types of lithography systems: Optical X-ray electron beam writer (non-traditional, no masks) Two-dimensional pattern transfer: limited
Part 5-1: Lithography Yao-Joe Yang 1 Pattern Transfer (Patterning) Types of lithography systems: Optical X-ray electron beam writer (non-traditional, no masks) Two-dimensional pattern transfer: limited
of harmonic cancellation algorithms The internal model principle enable precision motion control Dynamic control
 Dynamic control Harmonic cancellation algorithms enable precision motion control The internal model principle is a 30-years-young idea that serves as the basis for a myriad of modern motion control approaches.
Dynamic control Harmonic cancellation algorithms enable precision motion control The internal model principle is a 30-years-young idea that serves as the basis for a myriad of modern motion control approaches.
Magnetic Levitation System
 Magnetic Levitation System Electromagnet Infrared LED Phototransistor Levitated Ball Magnetic Levitation System K. Craig 1 Magnetic Levitation System Electromagnet Emitter Infrared LED i Detector Phototransistor
Magnetic Levitation System Electromagnet Infrared LED Phototransistor Levitated Ball Magnetic Levitation System K. Craig 1 Magnetic Levitation System Electromagnet Emitter Infrared LED i Detector Phototransistor
Track-Following Control using a Disturbance Observer with Asymptotic Disturbance Rejection in High-Speed Optical Disk Drives
 1178 IEEE Transactions on Consumer Electronics, Vol. 49, No. 4, NOVEMBER 003 Track-Following Control using a Disturbance Observer with Asymptotic Disturbance Rejection in High-Speed Optical Disk Drives
1178 IEEE Transactions on Consumer Electronics, Vol. 49, No. 4, NOVEMBER 003 Track-Following Control using a Disturbance Observer with Asymptotic Disturbance Rejection in High-Speed Optical Disk Drives
PID Parameter Selection. Based on Iterative Learning Control
 Contemporary Engineering Sciences, Vol. 4, 2011, no. 5, 201 220 PID Parameter Selection Based on Iterative Learning Control M. Rezaei Kerman, Iran University of Kerman Electrical Engineering Department
Contemporary Engineering Sciences, Vol. 4, 2011, no. 5, 201 220 PID Parameter Selection Based on Iterative Learning Control M. Rezaei Kerman, Iran University of Kerman Electrical Engineering Department
Scalar control synthesis 1
 Lecture 4 Scalar control synthesis The lectures reviews the main aspects in synthesis of scalar feedback systems. Another name for such systems is single-input-single-output(siso) systems. The specifications
Lecture 4 Scalar control synthesis The lectures reviews the main aspects in synthesis of scalar feedback systems. Another name for such systems is single-input-single-output(siso) systems. The specifications
Automatic Control Systems
 Automatic Control Systems Lecture-1 Basic Concepts of Classical control Emam Fathy Department of Electrical and Control Engineering email: emfmz@yahoo.com 1 What is Control System? A system Controlling
Automatic Control Systems Lecture-1 Basic Concepts of Classical control Emam Fathy Department of Electrical and Control Engineering email: emfmz@yahoo.com 1 What is Control System? A system Controlling
Implementation of decentralized active control of power transformer noise
 Implementation of decentralized active control of power transformer noise P. Micheau, E. Leboucher, A. Berry G.A.U.S., Université de Sherbrooke, 25 boulevard de l Université,J1K 2R1, Québec, Canada Philippe.micheau@gme.usherb.ca
Implementation of decentralized active control of power transformer noise P. Micheau, E. Leboucher, A. Berry G.A.U.S., Université de Sherbrooke, 25 boulevard de l Université,J1K 2R1, Québec, Canada Philippe.micheau@gme.usherb.ca
A Model Based Digital PI Current Loop Control Design for AMB Actuator Coils Lei Zhu 1, a and Larry Hawkins 2, b
 A Model Based Digital PI Current Loop Control Design for AMB Actuator Coils Lei Zhu 1, a and Larry Hawkins 2, b 1, 2 Calnetix, Inc 23695 Via Del Rio Yorba Linda, CA 92782, USA a lzhu@calnetix.com, b lhawkins@calnetix.com
A Model Based Digital PI Current Loop Control Design for AMB Actuator Coils Lei Zhu 1, a and Larry Hawkins 2, b 1, 2 Calnetix, Inc 23695 Via Del Rio Yorba Linda, CA 92782, USA a lzhu@calnetix.com, b lhawkins@calnetix.com
System Identification in Dynamic Networks
 System Identification in Dynamic Networks Paul Van den Hof Coworkers: Arne Dankers, Harm Weerts, Xavier Bombois, Peter Heuberger 14 June 2016, University of Oxford, UK Introduction dynamic networks / Electrical
System Identification in Dynamic Networks Paul Van den Hof Coworkers: Arne Dankers, Harm Weerts, Xavier Bombois, Peter Heuberger 14 June 2016, University of Oxford, UK Introduction dynamic networks / Electrical
Active sway control of a gantry crane using hybrid input shaping and PID control schemes
 Home Search Collections Journals About Contact us My IOPscience Active sway control of a gantry crane using hybrid input shaping and PID control schemes This content has been downloaded from IOPscience.
Home Search Collections Journals About Contact us My IOPscience Active sway control of a gantry crane using hybrid input shaping and PID control schemes This content has been downloaded from IOPscience.
MECHATRONICS RESEARCH AND EDUCATION AT THE UNIVERSITY OF TWENTE. Job van Amerongen
 Third Triennial International Conference on Applied Automatic Systems Ohrid, Republic of Macedonia, September 18-20, 2003 MECHATRONICS RESEARCH AND EDUCATION AT THE UNIVERSITY OF TWENTE Job van Amerongen
Third Triennial International Conference on Applied Automatic Systems Ohrid, Republic of Macedonia, September 18-20, 2003 MECHATRONICS RESEARCH AND EDUCATION AT THE UNIVERSITY OF TWENTE Job van Amerongen
Embedded Control Project -Iterative learning control for
 Embedded Control Project -Iterative learning control for Author : Axel Andersson Hariprasad Govindharajan Shahrzad Khodayari Project Guide : Alexander Medvedev Program : Embedded Systems and Engineering
Embedded Control Project -Iterative learning control for Author : Axel Andersson Hariprasad Govindharajan Shahrzad Khodayari Project Guide : Alexander Medvedev Program : Embedded Systems and Engineering
V2018 SPINSTAND AND NEW SERVO-8 SYSTEM
 34 http://www.guzik.com/products/head-and-media-disk-drive-test/spinstands/ V2018 SPINSTAND AND NEW SERVO-8 SYSTEM Designed for Automated High-TPI HGA Volume Testing Up to 1300 ktpi Estimated Capability
34 http://www.guzik.com/products/head-and-media-disk-drive-test/spinstands/ V2018 SPINSTAND AND NEW SERVO-8 SYSTEM Designed for Automated High-TPI HGA Volume Testing Up to 1300 ktpi Estimated Capability
CONTROL DESIGN FOR AN IRRIGATION CHANNEL FROM PHYSICAL DATA
 CONTROL DESIGN FOR AN IRRIGATION CHANNEL FROM PHYSICAL DATA Su Ki Ooi E. Weyer CSSIP, Department of Electrical and Electronic Engineering The University of Melbourne Parkville VIC 3010 Australia e-mail:
CONTROL DESIGN FOR AN IRRIGATION CHANNEL FROM PHYSICAL DATA Su Ki Ooi E. Weyer CSSIP, Department of Electrical and Electronic Engineering The University of Melbourne Parkville VIC 3010 Australia e-mail:
Low-Level RF. S. Simrock, DESY. MAC mtg, May 05 Stefan Simrock DESY
 Low-Level RF S. Simrock, DESY Outline Scope of LLRF System Work Breakdown for XFEL LLRF Design for the VUV-FEL Cost, Personpower and Schedule RF Systems for XFEL RF Gun Injector 3rd harmonic cavity Main
Low-Level RF S. Simrock, DESY Outline Scope of LLRF System Work Breakdown for XFEL LLRF Design for the VUV-FEL Cost, Personpower and Schedule RF Systems for XFEL RF Gun Injector 3rd harmonic cavity Main
Facing Moore s Law with Model-Driven R&D
 Facing Moore s Law with Model-Driven R&D Markus Matthes Executive Vice President Development and Engineering, ASML Eindhoven, June 11 th, 2015 Slide 2 Contents Introducing ASML Lithography, the driving
Facing Moore s Law with Model-Driven R&D Markus Matthes Executive Vice President Development and Engineering, ASML Eindhoven, June 11 th, 2015 Slide 2 Contents Introducing ASML Lithography, the driving
Chapter 2 The Test Benches
 Chapter 2 The Test Benches 2.1 An Active Hydraulic Suspension System Using Feedback Compensation The structure of the active hydraulic suspension (active isolation configuration) is presented in Fig. 2.1.
Chapter 2 The Test Benches 2.1 An Active Hydraulic Suspension System Using Feedback Compensation The structure of the active hydraulic suspension (active isolation configuration) is presented in Fig. 2.1.
The Waferstepper Challenge: Innovation and Reliability despite Complexity
 The Waferstepper Challenge: Innovation and Reliability despite Complexity - Hasbergsvei 36 P.O. Box 235, NO-3603 Kongsberg Norway gaudisite@gmail.com Abstract The function of the waferstepper is explained
The Waferstepper Challenge: Innovation and Reliability despite Complexity - Hasbergsvei 36 P.O. Box 235, NO-3603 Kongsberg Norway gaudisite@gmail.com Abstract The function of the waferstepper is explained
A New Repetitive Control Scheme Based on Non-Causal FIR Filters
 24 American Control Conference (ACC) June 4-6, 24. Portland, Oregon, USA A New Repetitive Control Scheme Based on Non-Causal FIR Filters Yik R. Teo and Andrew J. Fleming Abstract Repetitive Control (RC)
24 American Control Conference (ACC) June 4-6, 24. Portland, Oregon, USA A New Repetitive Control Scheme Based on Non-Causal FIR Filters Yik R. Teo and Andrew J. Fleming Abstract Repetitive Control (RC)
The Intelligent Combination of Input Shaping and PID Feedback Control. John R. Huey
 The Intelligent Combination of Input Shaping and PID Feedback Control A Dissertation Presented to The Academic Faculty by John R. Huey In Partial Fulfillment of the Requirements for the Degree Doctor of
The Intelligent Combination of Input Shaping and PID Feedback Control A Dissertation Presented to The Academic Faculty by John R. Huey In Partial Fulfillment of the Requirements for the Degree Doctor of
Ball Balancing on a Beam
 1 Ball Balancing on a Beam Muhammad Hasan Jafry, Haseeb Tariq, Abubakr Muhammad Department of Electrical Engineering, LUMS School of Science and Engineering, Pakistan Email: {14100105,14100040}@lums.edu.pk,
1 Ball Balancing on a Beam Muhammad Hasan Jafry, Haseeb Tariq, Abubakr Muhammad Department of Electrical Engineering, LUMS School of Science and Engineering, Pakistan Email: {14100105,14100040}@lums.edu.pk,
P.J. van Bree, C.M.M. van Lierop, P.P.J. van den Bosch
 Electron Microscopy Experiments Concerning Hysteresis in the Magnetic Lens System camera ready version submitted at 8 June 2 to IEEE Conference on Control Applications (CCA), Multi-Conference on Systems
Electron Microscopy Experiments Concerning Hysteresis in the Magnetic Lens System camera ready version submitted at 8 June 2 to IEEE Conference on Control Applications (CCA), Multi-Conference on Systems
Phys Lecture 5. Motors
 Phys 253 Lecture 5 1. Get ready for Design Reviews Next Week!! 2. Comments on Motor Selection 3. Introduction to Control (Lab 5 Servo Motor) Different performance specifications for all 4 DC motors supplied
Phys 253 Lecture 5 1. Get ready for Design Reviews Next Week!! 2. Comments on Motor Selection 3. Introduction to Control (Lab 5 Servo Motor) Different performance specifications for all 4 DC motors supplied
Advanced Motion Control Optimizes Laser Micro-Drilling
 Advanced Motion Control Optimizes Laser Micro-Drilling The following discussion will focus on how to implement advanced motion control technology to improve the performance of laser micro-drilling machines.
Advanced Motion Control Optimizes Laser Micro-Drilling The following discussion will focus on how to implement advanced motion control technology to improve the performance of laser micro-drilling machines.
Investigating control strategies for the Phicom 3 wirebonder
 Investigating control strategies for the Phicom 3 wirebonder T. Kok DCT 2006.103 Traineeship report Coach(es): Supervisor: H.M.J. van de Groes M. Steinbuch Technische Universiteit Eindhoven Department
Investigating control strategies for the Phicom 3 wirebonder T. Kok DCT 2006.103 Traineeship report Coach(es): Supervisor: H.M.J. van de Groes M. Steinbuch Technische Universiteit Eindhoven Department
MAGNETIC LEVITATION SUSPENSION CONTROL SYSTEM FOR REACTION WHEEL
 IMPACT: International Journal of Research in Engineering & Technology (IMPACT: IJRET) ISSN 2321-8843 Vol. 1, Issue 4, Sep 2013, 1-6 Impact Journals MAGNETIC LEVITATION SUSPENSION CONTROL SYSTEM FOR REACTION
IMPACT: International Journal of Research in Engineering & Technology (IMPACT: IJRET) ISSN 2321-8843 Vol. 1, Issue 4, Sep 2013, 1-6 Impact Journals MAGNETIC LEVITATION SUSPENSION CONTROL SYSTEM FOR REACTION
CONTROL IMPROVEMENT OF UNDER-DAMPED SYSTEMS AND STRUCTURES BY INPUT SHAPING
 CONTROL IMPROVEMENT OF UNDER-DAMPED SYSTEMS AND STRUCTURES BY INPUT SHAPING Igor Arolovich a, Grigory Agranovich b Ariel University of Samaria a igor.arolovich@outlook.com, b agr@ariel.ac.il Abstract -
CONTROL IMPROVEMENT OF UNDER-DAMPED SYSTEMS AND STRUCTURES BY INPUT SHAPING Igor Arolovich a, Grigory Agranovich b Ariel University of Samaria a igor.arolovich@outlook.com, b agr@ariel.ac.il Abstract -
Section 2: Lithography. Jaeger Chapter 2. EE143 Ali Javey Slide 5-1
 Section 2: Lithography Jaeger Chapter 2 EE143 Ali Javey Slide 5-1 The lithographic process EE143 Ali Javey Slide 5-2 Photolithographic Process (a) (b) (c) (d) (e) (f) (g) Substrate covered with silicon
Section 2: Lithography Jaeger Chapter 2 EE143 Ali Javey Slide 5-1 The lithographic process EE143 Ali Javey Slide 5-2 Photolithographic Process (a) (b) (c) (d) (e) (f) (g) Substrate covered with silicon
Advanced Nanoscale Metrology with AFM
 Advanced Nanoscale Metrology with AFM Sang-il Park Corp. SPM: the Key to the Nano World Initiated by the invention of STM in 1982. By G. Binnig, H. Rohrer, Ch. Gerber at IBM Zürich. Expanded by the invention
Advanced Nanoscale Metrology with AFM Sang-il Park Corp. SPM: the Key to the Nano World Initiated by the invention of STM in 1982. By G. Binnig, H. Rohrer, Ch. Gerber at IBM Zürich. Expanded by the invention
Design and Analysis of Discrete-Time Repetitive Control for Scanning Probe Microscopes
 Ugur Aridogan Yingfeng Shan Kam K. Leang 1 e-mail: kam@unr.edu Department of Mechanical Engineering, University of Nevada-Reno, Reno, NV 89557 Design and Analysis of Discrete-Time Repetitive Control for
Ugur Aridogan Yingfeng Shan Kam K. Leang 1 e-mail: kam@unr.edu Department of Mechanical Engineering, University of Nevada-Reno, Reno, NV 89557 Design and Analysis of Discrete-Time Repetitive Control for
Exam Signal Detection and Noise
 Exam Signal Detection and Noise Tuesday 27 January 2015 from 14:00 until 17:00 Lecturer: Sense Jan van der Molen Important: It is not allowed to use a calculator. Complete each question on a separate piece
Exam Signal Detection and Noise Tuesday 27 January 2015 from 14:00 until 17:00 Lecturer: Sense Jan van der Molen Important: It is not allowed to use a calculator. Complete each question on a separate piece
Optimization aided Loop Shaping for Motion Systems
 Optimization aided Loop Shaping for Motion Systems Dennis Bruijnen, René van de Molengraft and Maarten Steinbuch Abstract An approach is proposed which improves the quality and speed of manual loop shaping.
Optimization aided Loop Shaping for Motion Systems Dennis Bruijnen, René van de Molengraft and Maarten Steinbuch Abstract An approach is proposed which improves the quality and speed of manual loop shaping.
Control Systems of the Large Millimeter Telescope
 IPN Progress Report 4-54 August 5, 3 Control Systems of the Large Millimeter Telescope W. Gawronski and K. Souccar This article presents the analysis results (in terms of settling time, bandwidth, and
IPN Progress Report 4-54 August 5, 3 Control Systems of the Large Millimeter Telescope W. Gawronski and K. Souccar This article presents the analysis results (in terms of settling time, bandwidth, and
Servo Tuning. Dr. Rohan Munasinghe Department. of Electronic and Telecommunication Engineering University of Moratuwa. Thanks to Dr.
 Servo Tuning Dr. Rohan Munasinghe Department. of Electronic and Telecommunication Engineering University of Moratuwa Thanks to Dr. Jacob Tal Overview Closed Loop Motion Control System Brain Brain Muscle
Servo Tuning Dr. Rohan Munasinghe Department. of Electronic and Telecommunication Engineering University of Moratuwa Thanks to Dr. Jacob Tal Overview Closed Loop Motion Control System Brain Brain Muscle
Applications of Passivity Theory to the Active Control of Acoustic Musical Instruments
 Applications of Passivity Theory to the Active Control of Acoustic Musical Instruments Edgar Berdahl, Günter Niemeyer, and Julius O. Smith III Acoustics 08 Conference, Paris, France June 29th-July 4th,
Applications of Passivity Theory to the Active Control of Acoustic Musical Instruments Edgar Berdahl, Günter Niemeyer, and Julius O. Smith III Acoustics 08 Conference, Paris, France June 29th-July 4th,
Hybrid Input Shaping and Non-collocated PID Control of a Gantry Crane System: Comparative Assessment
 Hybrid Input Shaping and Non-collocated PID Control of a Gantry Crane System: Comparative Assessment M.A. Ahmad, R.M.T. Raja Ismail and M.S. Ramli Faculty of Electrical and Electronics Engineering Universiti
Hybrid Input Shaping and Non-collocated PID Control of a Gantry Crane System: Comparative Assessment M.A. Ahmad, R.M.T. Raja Ismail and M.S. Ramli Faculty of Electrical and Electronics Engineering Universiti
FlexLab and LevLab: A Portable Lab for Dynamics and Control Teaching
 FlexLab and LevLab: A Portable Lab for Dynamics and Control Teaching Lei Zhou, Mohammad Imani Nejad, David L. Trumper Department of Mechanical Engineering, Massachusetts Institute of Technology, Cambridge,
FlexLab and LevLab: A Portable Lab for Dynamics and Control Teaching Lei Zhou, Mohammad Imani Nejad, David L. Trumper Department of Mechanical Engineering, Massachusetts Institute of Technology, Cambridge,
PARAMETER ESTIMATION OF FALSE DYNAMIC EIV MODEL WITH ADDITIVE UNCERTAINTY
 Web Site: wwwijaiemorg Email: editor@ijaiemorg Volume 3, Issue 5, May 24 ISSN 239-4847 PARAMETER ESTIMATION OF FALSE DYNAMIC EIV MODEL WITH ADDITIVE UNCERTAINTY Dr (Mrs) Dalvinder Mangal, 2 Dr (Mrs) Lillie
Web Site: wwwijaiemorg Email: editor@ijaiemorg Volume 3, Issue 5, May 24 ISSN 239-4847 PARAMETER ESTIMATION OF FALSE DYNAMIC EIV MODEL WITH ADDITIVE UNCERTAINTY Dr (Mrs) Dalvinder Mangal, 2 Dr (Mrs) Lillie
NANOMEFOS (Nanometer Accuracy Non-contact Measurement of Free-form Optical Surfaces)
") NANOMEFOS (Nanometer Accuracy Non-contact Measurement of Free-form Optical Surfaces) Citation for published version (APA): Henselmans, R., Rosielle, P. C. J. N., & Kappelhof, J. P. (2004). NANOMEFOS (Nanometer
NANOMEFOS (Nanometer Accuracy Non-contact Measurement of Free-form Optical Surfaces) Citation for published version (APA): Henselmans, R., Rosielle, P. C. J. N., & Kappelhof, J. P. (2004). NANOMEFOS (Nanometer
Design of Linear Phase Lead Repetitive Control for CVCF PWM DC-AC Converters
 5 American Control Conference June 8-1, 5. Portland, OR, USA WeB18.6 Design of Linear Phase Lead Repetitive Control for CVCF PWM DC-AC Converters Bin Zhang, Keliang Zhou, Yongqiang Ye and Danwei Wang Abstract
5 American Control Conference June 8-1, 5. Portland, OR, USA WeB18.6 Design of Linear Phase Lead Repetitive Control for CVCF PWM DC-AC Converters Bin Zhang, Keliang Zhou, Yongqiang Ye and Danwei Wang Abstract
INVERSION-BASED ITERATIVE FEEDFORWARD-FEEDBACK CONTROL: APPLICATION TO NANOMECHANICAL MEASUREMENTS AND HIGH-SPEED NANOPOSITIONING
 INVERSION-BASED ITERATIVE FEEDFORWARD-FEEDBACK CONTROL: APPLICATION TO NANOMECHANICAL MEASUREMENTS AND HIGH-SPEED NANOPOSITIONING BY YAN ZHANG A thesis submitted to the Graduate School New Brunswick Rutgers,
INVERSION-BASED ITERATIVE FEEDFORWARD-FEEDBACK CONTROL: APPLICATION TO NANOMECHANICAL MEASUREMENTS AND HIGH-SPEED NANOPOSITIONING BY YAN ZHANG A thesis submitted to the Graduate School New Brunswick Rutgers,
MECHATRONICS IN BIOMEDICAL APPLICATIONS AND BIOMECHATRONICS
 MECHATRONICS IN BIOMEDICAL APPLICATIONS AND BIOMECHATRONICS Job van Amerongen Cornelis J. Drebbel Research Institute for Systems Engineering, Faculty of Electrical Engineering, University of Twente, P.O.
MECHATRONICS IN BIOMEDICAL APPLICATIONS AND BIOMECHATRONICS Job van Amerongen Cornelis J. Drebbel Research Institute for Systems Engineering, Faculty of Electrical Engineering, University of Twente, P.O.
2DOF H infinity Control for DC Motor Using Genetic Algorithms
 , March 12-14, 214, Hong Kong 2DOF H infinity Control for DC Motor Using Genetic Algorithms Natchanon Chitsanga and Somyot Kaitwanidvilai Abstract This paper presents a new method of 2DOF H infinity Control
, March 12-14, 214, Hong Kong 2DOF H infinity Control for DC Motor Using Genetic Algorithms Natchanon Chitsanga and Somyot Kaitwanidvilai Abstract This paper presents a new method of 2DOF H infinity Control
TAMING THE POWER ABB Review series
 TAMING THE POWER ABB Review series 54 ABB review 3 15 Beating oscillations Advanced active damping methods in medium-voltage power converters control electrical oscillations PETER AL HOKAYEM, SILVIA MASTELLONE,
TAMING THE POWER ABB Review series 54 ABB review 3 15 Beating oscillations Advanced active damping methods in medium-voltage power converters control electrical oscillations PETER AL HOKAYEM, SILVIA MASTELLONE,
ANTI-WINDUP SCHEME FOR PRACTICAL CONTROL OF POSITIONING SYSTEMS
 ANTI-WINDUP SCHEME FOR PRACTICAL CONTROL OF POSITIONING SYSTEMS WAHYUDI, TARIG FAISAL AND ABDULGANI ALBAGUL Department of Mechatronics Engineering, International Islamic University, Malaysia, Jalan Gombak,
ANTI-WINDUP SCHEME FOR PRACTICAL CONTROL OF POSITIONING SYSTEMS WAHYUDI, TARIG FAISAL AND ABDULGANI ALBAGUL Department of Mechatronics Engineering, International Islamic University, Malaysia, Jalan Gombak,