Flight Verification and Validation of an L1 All-Adaptive Flight Control System
|
|
|
- Patrick Goodwin
- 5 years ago
- Views:
Transcription





1 Flight Verification and Validation of an L1 All-Adaptive Flight Control System Enric Xargay, Naira Hovakimyan Department of Aerospace Engineering University of Illinois at Urbana-Champaign {xargay, Safe & Secure Systems & Software Symposium - June 15, 2010
2 Outline Adaptive Control in Transition Robust Fast Adaptation: L1 Adaptive Control AirSTAR Project L1 All-Adaptive FCS Piloted Sim Evaluations Flight Test Evaluations (NOT flight demonstrations) Conclusions March 2010 AirSTAR Deployment June 2010 AirSTAR Deployment Closing certification gaps Real alternative to gain scheduling


 GTM")

 F-15")
 X-36")


 Boeing X-45A &")




3 Adaptive Control in Transition Fast adaptation Single design AFCS NPS FlightTest Program Sig RASCAL IRAC (NASA) GTM T2 60s X-15 (NASA/USAF/ US Navy) IFCS (NASA/Boeing) F-15 ACTIVE RESTORE (AFRL-VA/Boeing) X-36 Adaptive Control for Munitions (AFRL-MN/GST/Boeing) MK-84 MK-82 L-JDAM J-UCAS (DARPA/USAF/US Navy) Boeing X-45A & X-45C in production MK-84 JDAM Gen I: flown 1999, 2003 Gen II: flight test 4th Q 2005 Gen III: 2006 Slow adaptation Expensive gain-scheduled AFCS evaluated in flight sim environment in production Source: Kevin Wise, Boeing (adapted)

4 Robust Fast Adaptation: the key to safe flight Predictable :: Repeatable :: Testable :: Safe Control law objectives: Keep aircraft in the wind tunnel data envelope (accurate models) Is A/C controllable here? Eventually, return to normal flight envelope Control actions within 2-4 seconds of failure onset are critical: Need for transient performance guarantees Predictable response Need for fast adaptation Source: NASA Failure of conventional adaptive control (limited to slow adaptation)
5 Main Features of L 1 Adaptive Control Separation between adaptation and robustness Performance limitations reduced to hardware limitations Guaranteed robustness with fast adaptation Guaranteed transient response for input and output NOT achieved via high-gain feedback or persistence of excitation or gain-scheduling or control reconfiguration Guaranteed (bounded away from zero) time-delay margin Uniform scaled transient response dependent on changes in initial conditions, uncertainties, and reference inputs Verifiable software with computationally predictable numerical characteristics Systematic design guidelines suitable for flight verification Suitable for development of theoretically justified Verification & Validation tools for feedback systems
, 53 mph stall speed Model angular response is 4.")
6 NASA Langley AirSTAR :: Generic Transport Model High-risk flight conditions, some unable to be tested in target application environment. 5.5 % geometrically and dynamically scaled model 82in wingspan, 96in length, 49.6 lbs (54 lbs full), 53 mph stall speed Model angular response is 4.26 faster than full scale Model velocity is 4.26 times slower than regular scale

, without gain scheduling Compensation for structural damage/actuator")

7 AirSTAR :: Challenges Inner-loop state-feedback controller for tracking angle of attack, roll rate, and sideslip angle commands. Challenges: Single all-adaptive design for the entire flight envelope (including stall and post stall high α conditions), without gain scheduling Compensation for structural damage/actuator failures without FDI methods Compensation for unmatched uncertainties variations is α, β, V dynamics with flight condition Strict performance requirements: High precision tracking Reduced workload Predictable response!!! L 1 AFCS Hardware requirements: Euler integration at 600Hz

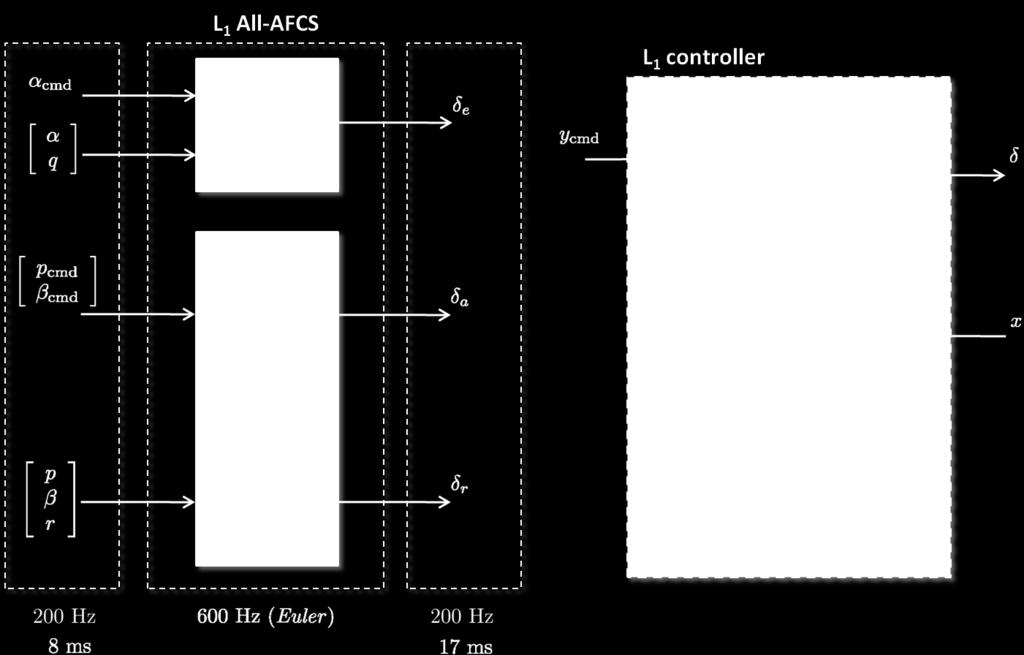
8 AirSTAR :: All-Adaptive FCS
9 Baseline p [deg/s], [deg] p [deg/s], [deg] p [deg/s], [deg] p [deg/s], [deg] L1 Controller p [deg/s], [deg] p [deg/s], [deg] p [deg/s], [deg] p [deg/s], [deg] AirSTAR :: Piloted Sim Evaluation (Bank capture) Bank angle capture task : φ 45 deg Acquire in 2 sec, hold for 2 sec; desired ± 5 deg, adequate ±10 deg. Nominal ΔClp = -50% ΔClp = -75% ΔClp = -100% p cmd p L1 bank time [s] p cmd p L1 bank time [s] p cmd p L1 bank time [s] p cmd p L1 bank time [s] Level I Level I Level I Level II (CH4) p cmd p Base bank time [s] p cmd p Base bank time [s] p cmd p Base bank time [s] p cmd p Base bank time [s] Level I Level I Level III (CH9) Uncontrollable (CH10)
 1. Full throttle (100%) 2.")

10 AirSTAR :: Piloted Sim Evaluation (asymmetric engine failure) 1. Full throttle (100%) 2. Climb at deg pitch 3. Left Throttle cut to 0% in <0.5sec L1 Adaptive Control Stick-to-Surface Stick-to-Surface L 1 Controller
11 GTM T2 :: Flight Test Evaluation (March 2010) L1 all-adaptive FCL: provides performance/stability for nominal and impaired aircraft Not an augmentation to a baseline controller that provides nominal aircraft performance, like other adaptive controllers implemented Flight Control Law related tasks during March 2010 deployment: Flight Control Law Block : Injected longitudinal and lateral stick doublets for each fault, continuous stick doublets on straight legs during latency fault Latency fault: starting at 20msec, continuously increase in latency (5msec every 5sec) through the turns, etc until aircraft is neutrally stable or unstable want graceful performance degradation Robust to 105msec of additional time delay Simultaneous longitudinal and lateral stability degradation (Cmα/Clp): 50%: nominal performance 75%: nominal performance 100%: small degradation of performance observed by the pilot 125%: divergent closed-loop system Left elevator inboard and outboard segments locked-in-place failure (<2deg): nonevent for the adaptive controller

12 GTM T2 :: Flight Test Evaluation (March 2010) FLT14: Mode 3.2 (L1 all-adaptive) FCL under moderate (+) turbulence
13 GTM T2 :: Flight Test Evaluation (March 2010) this is the first successful flight of an all-adaptive control law that deals with aircraft stability degradation as well as actuator failures it is the first flight of a direct all-adaptive controller with a pilot in the loop NASA RTD weekly key activities report Dr. Irene M. Gregory
14 GTM T2 :: Flight Test Evaluation (June 2010) L1 all-adaptive FCL: provides performance/stability for nominal and impaired aircraft Not an augmentation to a baseline controller that provides nominal aircraft performance, like other adaptive controllers implemented Flight Control Law related tasks during June 2010 deployment: Flight Control Law Block : Injected longitudinal and lateral stick doublets for each fault, continuous stick doublets on straight legs during latency fault Latency fault: starting at 20msec, continuously increase in latency (5msec every 5sec), carried through the turns, until aircraft is neutrally stable or unstable want graceful performance degradation Robust to 130msec of additional time delay Simultaneous longitudinal and lateral stability degradation (Cmα/Clp): 50%: nominal performance 75%: nominal performance 100%: small degradation of performance observed by the pilot 125%: large amplitude roll with pitch doublet Left elevator inboard and outboard segments locked-in-place failure (<2deg): nonevent for the adaptive controller Modeling Tasks: L1 used for β-sweep in flat turn maneuver
")
 FCL")


15 GTM T2 :: Flight Test Evaluation (June 2010) FLT23: Mode 3.6 (L1 all-adaptive) FCL under light turbulence SP Research Pilot SP SP Research Pilot SP High AOA flight Post-stall regimes ~12.5 mins of flight with L1











16 GTM T2 :: Flight Test Evaluation (June 2010) Post-stall, high angle of attack flight Open-loop aircraft tends to aggressively roll off between 13deg and 15deg AOA and exhibits significant degradation in pitch stability Stick to surface Aggressive departure Roll rate above 60dps Normal flight FQ Level I A/C All 3 stick-to-surface attempts in maintaining controlled flight at AOA=18deg were unsuccessful




17 GTM T2 :: Flight Test Evaluation (June 2010) Post-stall, high angle of attack flight L1 provides departure resilient control for aircraft in post-stall flight L1 adaptive controller achieved a very well controlled aircraft (pilot assessment) L1 AFCS Repeatable results Two AOA=18deg acquisitions with L1 AFCS Pitch break Oscillations around 15deg AOA A well controllable aircraft during stall and post-stall flight Dan Murri AirSTAR GTM T2 research pilot Roll rate below 20dps
18 GTM T2 :: Flight Test Evaluation (June 2010) Post-stall, high angle of attack flight L1 provides departure resilient control for aircraft in post-stall flight Stick to surface L1 AFCS
19 GTM T2 :: Flight Test Evaluation (June 2010) L1 All-AFCS Flight Test Summary: All-adaptive FCS that provides nominal aircraft performance and takes care of large changes in aircraft dynamics No baseline to assist in A single controller design at a nominal flight condition (4deg AOA) to provide satisfactory FQ and robustness No gain scheduling of control parameters Predictable response to the pilot under stability degradation and graceful performance degradation once nominal response was unachievable Departure resistant in post-stall flight: L1 provides a controllable aircraft to the pilot and facilitates safe return to normal flight Good time-delay margin Robust to control saturation (occurred during high AOA flight) This is the first post-stall flight of an adaptive controller



20 GTM T2 :: X-29 :: X-48B GTM T2 All-adaptive NASA Langley Grumman X-29 Augmentation of an LQR-PI NASA Dryden X-48B Blended Wing Body Augmentation of a dynamic inversion controller AFRL/Boeing
21 Closing the Certification Gaps (I) From : Closing the Certification Gaps in Adaptive Flight Control Software Jacklin, 2008 Verification, Validation, and Certification Challenges for Adaptive Flight-Critical Control Systems Software Jacklin et al., 2004 [ ] the Lyapunov analysis only guarantees the ultimate stability of the learning algorithm; the proof does not guarantee how fast the system returns to the origin. Ultimate boundedness and asymptotic convergence are weak properties for (nonlinear) adaptive closed-loop systems. L1 achieves guaranteed uniform transient and steady-state performance. This is an important point for system performance, because if learning happens too slowly, an adaptive controller may be rendered ineffective for the control task at hand. Fast adaptation -only limited by hardware- allows for compensation of undesirable effects of rapidly varying uncertainties and significant changes in system dynamics. Yet another gap is that methods to find acceptable gains for stable learning must be found other than the time intensive and error process. Adaptation rate set as fast as hardware permits. Conventional tools and methods from classical and robust control can be applied to tune the LINEAR filter of L1 architectures.
22 Closing the Certification Gaps (and II) From : Closing the Certification Gaps in Adaptive Flight Control Software Jacklin, 2008 Verification, Validation, and Certification Challenges for Adaptive Flight-Critical Control Systems Software Jacklin et al., 2004 A persistent excitation signal added to the control signal yields more convergent learning, but at the expense of poorer steady-state controller performance. With an adaptive system [ ] test inputs might provide the excitation needed for better learning and adaptation that might not be available to the fielded system. Guaranteed performance of L1 does not rely on persistence of excitation assumptions or on the injection of persistently exciting signals. Closed-loop response does not depend on the nature of the external inputs. Fast adaptation is the key for predictability and repeatability. On-line adaptation of network connection weights makes it impossible to predict, in a deterministic sense, the future form of the neural network mapping. [ ] the computation time was affected by the number of connections between nodes [of the NN]. [ ] With all this variability, it proved difficult challenge to validate the worstcase computation time required for this type of neural network. Fast adaptation allows for control of time-varying nonlinear systems by adapting two parameters only. No need to resort to neural networks. Deterministic control algorithm.
23 L 1 adaptive control architectures: Performance and robustness guarantees Systematic design guidelines Conclusions Computationally predictable characteristics Design of robust adaptive flight control systems: Single design for the entire flight envelope (including stall and post-stall conditions) without Gain-scheduling/Persistency of excitation/control reconfiguration/high-gain feedback Compensation for structural damage and actuator failures without FDI methods Consistent results from platform to platform, as predicted by theory Implementation as an all-adaptive controller or as an augmentation loop for baseline controllers 2 successful flights with NASA s GTM T2 and over 100 successful flights with NPS Suitable for development of theoretically justified Verification & Validation tools for feedback systems
24 Real Alternative to Gain-Scheduling Günter Stein (1980s): The main point made is that for conventional flight control problems, adaptive control is the losing alternative in a historical competition with explicit airdata-scheduling. L1 Adaptive Control represents the first step towards a real alternative to gain-scheduled controllers!
25 Acknowledgements This research was supported by: NASA under grants NNX08BA64A and NNX08BA65A AFOSR under Contract FA AFRL under Contract F D-3052 Collaborators: Chengyu Cao (UConn) Irene M. Gregory (NASA Langley) Special thanks to the staff of the AirSTAR Flight Test Facility for their support with control law implementation.

26 Questions?
CDS 101/110a: Lecture 8-1 Frequency Domain Design
 CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
Status of Handling Qualities Treatment within Industrial Development Processes and Outlook for Future Needs
 Status of Handling Qualities Treatment within Industrial Development Processes and Outlook for Future Needs Dipl. Ing. R. Osterhuber, Dr. Ing. M. Hanel, MEA25 Flight Control Dr. Ing. Christoph Oelker,
Status of Handling Qualities Treatment within Industrial Development Processes and Outlook for Future Needs Dipl. Ing. R. Osterhuber, Dr. Ing. M. Hanel, MEA25 Flight Control Dr. Ing. Christoph Oelker,
A Handling Qualities Assessment of a Business Jet Augmented with an L 1 Adaptive Controller
 AIAA Guidance, Navigation, and Control Conference 08-11 August 2011, Portland, Oregon AIAA 2011-6610 A Handling Qualities Assessment of a Business Jet Augmented with an L 1 Adaptive Controller Olaf Stroosma,
AIAA Guidance, Navigation, and Control Conference 08-11 August 2011, Portland, Oregon AIAA 2011-6610 A Handling Qualities Assessment of a Business Jet Augmented with an L 1 Adaptive Controller Olaf Stroosma,
Barron Associates, Inc. Current Research
 Barron Associates, Inc. Current Research SAE International Aerospace Control & Guidance Systems Committee Hilton Head, SC Oct 12, 2005 David G. Ward (434) 973-1215 ward@barron-associates.com -1- Reusable
Barron Associates, Inc. Current Research SAE International Aerospace Control & Guidance Systems Committee Hilton Head, SC Oct 12, 2005 David G. Ward (434) 973-1215 ward@barron-associates.com -1- Reusable
Model-Based Detection and Isolation of Rudder Faults for a Small UAS
 Model-Based Detection and Isolation of Rudder Faults for a Small UAS Raghu Venkataraman and Peter Seiler Department of Aerospace Engineering & Mechanics University of Minnesota, Minneapolis, MN, 55455,
Model-Based Detection and Isolation of Rudder Faults for a Small UAS Raghu Venkataraman and Peter Seiler Department of Aerospace Engineering & Mechanics University of Minnesota, Minneapolis, MN, 55455,
WIND TUNNEL FREE-FLIGHT TEST FOR FLIGHT DYNAMICS AND CONTROL SYSTEM EXPERIMENTS
 WIND TUNNEL FREE-FLIGHT TEST FOR FLIGHT DYNAMICS AND CONTROL SYSTEM EXPERIMENTS CEN F.*, LI Q.*,NIE B.-W.**,LIU Z.-T.**,SUN H.-S.** * Tsinghua University, ** China Aerodynamics Research and Development
WIND TUNNEL FREE-FLIGHT TEST FOR FLIGHT DYNAMICS AND CONTROL SYSTEM EXPERIMENTS CEN F.*, LI Q.*,NIE B.-W.**,LIU Z.-T.**,SUN H.-S.** * Tsinghua University, ** China Aerodynamics Research and Development
Implementation of Nonlinear Reconfigurable Controllers for Autonomous Unmanned Vehicles
 Implementation of Nonlinear Reconfigurable Controllers for Autonomous Unmanned Vehicles Dere Schmitz Vijayaumar Janardhan S. N. Balarishnan Department of Mechanical and Aerospace engineering and Engineering
Implementation of Nonlinear Reconfigurable Controllers for Autonomous Unmanned Vehicles Dere Schmitz Vijayaumar Janardhan S. N. Balarishnan Department of Mechanical and Aerospace engineering and Engineering
FUZZY CONTROL FOR THE KADET SENIOR RADIOCONTROLLED AIRPLANE
 FUZZY CONTROL FOR THE KADET SENIOR RADIOCONTROLLED AIRPLANE Angel Abusleme, Aldo Cipriano and Marcelo Guarini Department of Electrical Engineering, Pontificia Universidad Católica de Chile P. O. Box 306,
FUZZY CONTROL FOR THE KADET SENIOR RADIOCONTROLLED AIRPLANE Angel Abusleme, Aldo Cipriano and Marcelo Guarini Department of Electrical Engineering, Pontificia Universidad Católica de Chile P. O. Box 306,
A New Perspective to Altitude Acquire-and- Hold for Fixed Wing UAVs
 Student Research Paper Conference Vol-1, No-1, Aug 2014 A New Perspective to Altitude Acquire-and- Hold for Fixed Wing UAVs Mansoor Ahsan Avionics Department, CAE NUST Risalpur, Pakistan mahsan@cae.nust.edu.pk
Student Research Paper Conference Vol-1, No-1, Aug 2014 A New Perspective to Altitude Acquire-and- Hold for Fixed Wing UAVs Mansoor Ahsan Avionics Department, CAE NUST Risalpur, Pakistan mahsan@cae.nust.edu.pk
CHASSIS DYNAMOMETER TORQUE CONTROL SYSTEM DESIGN BY DIRECT INVERSE COMPENSATION. C.Matthews, P.Dickinson, A.T.Shenton
 CHASSIS DYNAMOMETER TORQUE CONTROL SYSTEM DESIGN BY DIRECT INVERSE COMPENSATION C.Matthews, P.Dickinson, A.T.Shenton Department of Engineering, The University of Liverpool, Liverpool L69 3GH, UK Abstract:
CHASSIS DYNAMOMETER TORQUE CONTROL SYSTEM DESIGN BY DIRECT INVERSE COMPENSATION C.Matthews, P.Dickinson, A.T.Shenton Department of Engineering, The University of Liverpool, Liverpool L69 3GH, UK Abstract:
Intermediate Lateral Autopilots (I) Yaw orientation control
 Yaw orientation control") Intermediate Lateral Autopilots (I) Yaw orientation control Yaw orientation autopilot Lateral autopilot for yaw maneuver Designed to have the aircraft follow the pilot's yaw rate command or hold the aircraft
Intermediate Lateral Autopilots (I) Yaw orientation control Yaw orientation autopilot Lateral autopilot for yaw maneuver Designed to have the aircraft follow the pilot's yaw rate command or hold the aircraft
CDS 101/110a: Lecture 8-1 Frequency Domain Design. Frequency Domain Performance Specifications
 CDS /a: Lecture 8- Frequency Domain Design Richard M. Murray 7 November 28 Goals:! Describe canonical control design problem and standard performance measures! Show how to use loop shaping to achieve a
CDS /a: Lecture 8- Frequency Domain Design Richard M. Murray 7 November 28 Goals:! Describe canonical control design problem and standard performance measures! Show how to use loop shaping to achieve a
F-16 Quadratic LCO Identification
 Chapter 4 F-16 Quadratic LCO Identification The store configuration of an F-16 influences the flight conditions at which limit cycle oscillations develop. Reduced-order modeling of the wing/store system
Chapter 4 F-16 Quadratic LCO Identification The store configuration of an F-16 influences the flight conditions at which limit cycle oscillations develop. Reduced-order modeling of the wing/store system
Flight control system for a reusable rocket booster on the return flight through the atmosphere
 Flight control system for a reusable rocket booster on the return flight through the atmosphere Aaron Buysse 1, Willem Herman Steyn (M2) 1, Adriaan Schutte 2 1 Stellenbosch University Banghoek Rd, Stellenbosch
Flight control system for a reusable rocket booster on the return flight through the atmosphere Aaron Buysse 1, Willem Herman Steyn (M2) 1, Adriaan Schutte 2 1 Stellenbosch University Banghoek Rd, Stellenbosch
UAV: Design to Flight Report
 UAV: Design to Flight Report Team Members Abhishek Verma, Bin Li, Monique Hladun, Topher Sikorra, and Julio Varesio. Introduction In the start of the course we were to design a situation for our UAV's
UAV: Design to Flight Report Team Members Abhishek Verma, Bin Li, Monique Hladun, Topher Sikorra, and Julio Varesio. Introduction In the start of the course we were to design a situation for our UAV's
Artificial Neural Networks based Attitude Controlling of Longitudinal Autopilot for General Aviation Aircraft Nagababu V *1, Imran A 2
 ISSN (Print) : 2320-3765 ISSN (Online): 2278-8875 International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering Vol. 7, Issue 1, January 2018 Artificial Neural Networks
ISSN (Print) : 2320-3765 ISSN (Online): 2278-8875 International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering Vol. 7, Issue 1, January 2018 Artificial Neural Networks
A Mini UAV for security environmental monitoring and surveillance: telemetry data analysis
 A Mini UAV for security environmental monitoring and surveillance: telemetry data analysis G. Belloni 2,3, M. Feroli 3, A. Ficola 1, S. Pagnottelli 1,3, P. Valigi 2 1 Department of Electronic and Information
A Mini UAV for security environmental monitoring and surveillance: telemetry data analysis G. Belloni 2,3, M. Feroli 3, A. Ficola 1, S. Pagnottelli 1,3, P. Valigi 2 1 Department of Electronic and Information
Stability and Control Test and Evaluation Process Improvements through Judicious Use of HPC Simulations (3348)
") Stability and Control Test and Evaluation Process Improvements through Judicious Use of HPC Simulations (3348) James D Clifton USAF SEEK EAGLE Office jamesclifton@eglinafmil C Justin Ratcliff USAF SEEK
Stability and Control Test and Evaluation Process Improvements through Judicious Use of HPC Simulations (3348) James D Clifton USAF SEEK EAGLE Office jamesclifton@eglinafmil C Justin Ratcliff USAF SEEK
FOREBODY VORTEX CONTROL ON HIGH PERFORMANCE AIRCRAFT USING PWM- CONTROLLED PLASMA ACTUATORS
 26 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES FOREBODY VORTEX CONTROL ON HIGH PERFORMANCE AIRCRAFT USING PWM- CONTROLLED PLASMA ACTUATORS Takashi Matsuno*, Hiromitsu Kawazoe*, Robert C. Nelson**,
26 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES FOREBODY VORTEX CONTROL ON HIGH PERFORMANCE AIRCRAFT USING PWM- CONTROLLED PLASMA ACTUATORS Takashi Matsuno*, Hiromitsu Kawazoe*, Robert C. Nelson**,
Roll Control for a Micro Air Vehicle Using Active Wing Morphing
 Roll Control for a Micro Air Vehicle Using Active Wing Morphing Helen Garcia, Mujahid Abdulrahim and Rick Lind University of Florida 1 Introduction Relatively small aircraft have recently been receiving
Roll Control for a Micro Air Vehicle Using Active Wing Morphing Helen Garcia, Mujahid Abdulrahim and Rick Lind University of Florida 1 Introduction Relatively small aircraft have recently been receiving
NASA Fundamental Aeronautics Program Jay Dryer Director, Fundamental Aeronautics Program Aeronautics Research Mission Directorate
 National Aeronautics and Space Administration NASA Fundamental Aeronautics Program Jay Dryer Director, Fundamental Aeronautics Program Aeronautics Research Mission Directorate www.nasa.gov July 2012 NASA
National Aeronautics and Space Administration NASA Fundamental Aeronautics Program Jay Dryer Director, Fundamental Aeronautics Program Aeronautics Research Mission Directorate www.nasa.gov July 2012 NASA
A Real-Time Platform for Teaching Power System Control Design
 A Real-Time Platform for Teaching Power System Control Design G. Jackson, U.D. Annakkage, A. M. Gole, D. Lowe, and M.P. McShane Abstract This paper describes the development of a real-time digital simulation
A Real-Time Platform for Teaching Power System Control Design G. Jackson, U.D. Annakkage, A. M. Gole, D. Lowe, and M.P. McShane Abstract This paper describes the development of a real-time digital simulation
Getting the Best Performance from Challenging Control Loops
 Getting the Best Performance from Challenging Control Loops Jacques F. Smuts - OptiControls Inc, League City, Texas; jsmuts@opticontrols.com KEYWORDS PID Controls, Oscillations, Disturbances, Tuning, Stiction,
Getting the Best Performance from Challenging Control Loops Jacques F. Smuts - OptiControls Inc, League City, Texas; jsmuts@opticontrols.com KEYWORDS PID Controls, Oscillations, Disturbances, Tuning, Stiction,
System identification studies with the stiff wing minimutt Fenrir Flight 20
 SYSTEMS TECHNOLOGY, INC 3766 S. HAWTHORNE BOULEVARD HAWTHORNE, CALIFORNIA 925-783 PHONE (3) 679-228 email: sti@systemstech.com FAX (3) 644-3887 Working Paper 439- System identification studies with the
SYSTEMS TECHNOLOGY, INC 3766 S. HAWTHORNE BOULEVARD HAWTHORNE, CALIFORNIA 925-783 PHONE (3) 679-228 email: sti@systemstech.com FAX (3) 644-3887 Working Paper 439- System identification studies with the
TAU Experiences with Detached-Eddy Simulations
 TAU Experiences with Detached-Eddy Simulations Herbert Rieger & Stefan Leicher EADS Deutschland GmbH Military Aircraft Flight Physics Department Ottobrunn, Germany Outline The Typical Design Problem of
TAU Experiences with Detached-Eddy Simulations Herbert Rieger & Stefan Leicher EADS Deutschland GmbH Military Aircraft Flight Physics Department Ottobrunn, Germany Outline The Typical Design Problem of
Loop Design. Chapter Introduction
 Chapter 8 Loop Design 8.1 Introduction This is the first Chapter that deals with design and we will therefore start by some general aspects on design of engineering systems. Design is complicated because
Chapter 8 Loop Design 8.1 Introduction This is the first Chapter that deals with design and we will therefore start by some general aspects on design of engineering systems. Design is complicated because
NextGen Aviation Safety. Amy Pritchett Director, NASA Aviation Safety Program
 NextGen Aviation Safety Amy Pritchett Director, NASA Aviation Safety Program NowGen Started for Safety! System Complexity Has Increased As Safety Has Also Increased! So, When We Talk About NextGen Safety
NextGen Aviation Safety Amy Pritchett Director, NASA Aviation Safety Program NowGen Started for Safety! System Complexity Has Increased As Safety Has Also Increased! So, When We Talk About NextGen Safety
SECTION 6: ROOT LOCUS DESIGN
 SECTION 6: ROOT LOCUS DESIGN MAE 4421 Control of Aerospace & Mechanical Systems 2 Introduction Introduction 3 Consider the following unity feedback system 3 433 Assume A proportional controller Design
SECTION 6: ROOT LOCUS DESIGN MAE 4421 Control of Aerospace & Mechanical Systems 2 Introduction Introduction 3 Consider the following unity feedback system 3 433 Assume A proportional controller Design
Dynamic Throttle Estimation by Machine Learning from Professionals
 Dynamic Throttle Estimation by Machine Learning from Professionals Nathan Spielberg and John Alsterda Department of Mechanical Engineering, Stanford University Abstract To increase the capabilities of
Dynamic Throttle Estimation by Machine Learning from Professionals Nathan Spielberg and John Alsterda Department of Mechanical Engineering, Stanford University Abstract To increase the capabilities of
The Pennsylvania State University. The Graduate School. College of Engineering
 The Pennsylvania State University The Graduate School College of Engineering INTEGRATED FLIGHT CONTROL DESIGN AND HANDLING QUALITIES ANALYSIS FOR A TILTROTOR AIRCRAFT A Thesis in Aerospace Engineering
The Pennsylvania State University The Graduate School College of Engineering INTEGRATED FLIGHT CONTROL DESIGN AND HANDLING QUALITIES ANALYSIS FOR A TILTROTOR AIRCRAFT A Thesis in Aerospace Engineering
AS440 AUTOMATIC VOLTAGE REGULATOR (AVR)
") AS440 AUTOMATIC VOLTAGE REGULATOR (AVR) SPECIFICATION INSTALLATION AND ADJUSTMENTS General description Technical specification AS440 is a half wave phase controlled thyristor type AVR and forms part of
AS440 AUTOMATIC VOLTAGE REGULATOR (AVR) SPECIFICATION INSTALLATION AND ADJUSTMENTS General description Technical specification AS440 is a half wave phase controlled thyristor type AVR and forms part of
AFRL-VA-WP-TP
 AFRL-VA-WP-TP-7-31 PROPORTIONAL NAVIGATION WITH ADAPTIVE TERMINAL GUIDANCE FOR AIRCRAFT RENDEZVOUS (PREPRINT) Austin L. Smith FEBRUARY 7 Approved for public release; distribution unlimited. STINFO COPY
AFRL-VA-WP-TP-7-31 PROPORTIONAL NAVIGATION WITH ADAPTIVE TERMINAL GUIDANCE FOR AIRCRAFT RENDEZVOUS (PREPRINT) Austin L. Smith FEBRUARY 7 Approved for public release; distribution unlimited. STINFO COPY
4F3 - Predictive Control
 4F3 Predictive Control - Lecture 1 p. 1/13 4F3 - Predictive Control Lecture 1 - Introduction to Predictive Control Jan Maciejowski jmm@eng.cam.ac.uk http://www-control.eng.cam.ac.uk/homepage/officialweb.php?id=1
4F3 Predictive Control - Lecture 1 p. 1/13 4F3 - Predictive Control Lecture 1 - Introduction to Predictive Control Jan Maciejowski jmm@eng.cam.ac.uk http://www-control.eng.cam.ac.uk/homepage/officialweb.php?id=1
Classical Control Design Guidelines & Tools (L10.2) Transfer Functions
 Transfer Functions") Classical Control Design Guidelines & Tools (L10.2) Douglas G. MacMartin Summarize frequency domain control design guidelines and approach Dec 4, 2013 D. G. MacMartin CDS 110a, 2013 1 Transfer Functions
Classical Control Design Guidelines & Tools (L10.2) Douglas G. MacMartin Summarize frequency domain control design guidelines and approach Dec 4, 2013 D. G. MacMartin CDS 110a, 2013 1 Transfer Functions
Caution Notes. Features. Specifications. Installation. A3-L 3-axis Gyro User Manual V1.0
 Caution Notes Thank you for choosing our products. If any difficulties are encountered while setting up or operating it, please consult this manual first. For further help, please don t hesitate to contact
Caution Notes Thank you for choosing our products. If any difficulties are encountered while setting up or operating it, please consult this manual first. For further help, please don t hesitate to contact
International Journal of Modern Engineering and Research Technology
 Volume 5, Issue 1, January 2018 ISSN: 2348-8565 (Online) International Journal of Modern Engineering and Research Technology Website: http://www.ijmert.org Email: editor.ijmert@gmail.com Experimental Analysis
Volume 5, Issue 1, January 2018 ISSN: 2348-8565 (Online) International Journal of Modern Engineering and Research Technology Website: http://www.ijmert.org Email: editor.ijmert@gmail.com Experimental Analysis
Digiflight II SERIES AUTOPILOTS
 Operating Handbook For Digiflight II SERIES AUTOPILOTS TRUTRAK FLIGHT SYSTEMS 1500 S. Old Missouri Road Springdale, AR 72764 Ph. 479-751-0250 Fax 479-751-3397 Toll Free: 866-TRUTRAK 866-(878-8725) www.trutrakap.com
Operating Handbook For Digiflight II SERIES AUTOPILOTS TRUTRAK FLIGHT SYSTEMS 1500 S. Old Missouri Road Springdale, AR 72764 Ph. 479-751-0250 Fax 479-751-3397 Toll Free: 866-TRUTRAK 866-(878-8725) www.trutrakap.com
A3 Pro INSTRUCTION MANUAL. Oct 25, 2017 Revision IMPORTANT NOTES
 A3 Pro INSTRUCTION MANUAL Oct 25, 2017 Revision IMPORTANT NOTES 1. Radio controlled (R/C) models are not toys! The propellers rotate at high speed and pose potential risk. They may cause severe injury
A3 Pro INSTRUCTION MANUAL Oct 25, 2017 Revision IMPORTANT NOTES 1. Radio controlled (R/C) models are not toys! The propellers rotate at high speed and pose potential risk. They may cause severe injury
THE APPLICATION OF RADAR ENVIRONMENT SIMULATION TECHNOLOGY TO TELEMETRY SYSTEMS
 THE APPLICATION OF RADAR ENVIRONMENT SIMULATION TECHNOLOGY TO TELEMETRY SYSTEMS Item Type text; Proceedings Authors Kelkar, Anand; Gravelle, Luc Publisher International Foundation for Telemetering Journal
THE APPLICATION OF RADAR ENVIRONMENT SIMULATION TECHNOLOGY TO TELEMETRY SYSTEMS Item Type text; Proceedings Authors Kelkar, Anand; Gravelle, Luc Publisher International Foundation for Telemetering Journal
Digital Autoland Control Laws Using Quantitative Feedback Theory and Direct Digital Design
 JOURNAL OF GUIDANCE, CONROL, AND DYNAMICS Vol., No., September October 7 Digital Autoland Control Laws Using Quantitative Feedback heory and Direct Digital Design homas Wagner and John Valasek exas A&M
JOURNAL OF GUIDANCE, CONROL, AND DYNAMICS Vol., No., September October 7 Digital Autoland Control Laws Using Quantitative Feedback heory and Direct Digital Design homas Wagner and John Valasek exas A&M
USE OF WHITE NOISE IN TRACE/PARCS ANALYSIS OF ATWS WITH INSTABILITY
 USE OF WHITE NOISE IN TRACE/PARCS ANALYSIS OF ATWS WITH INSTABILITY T. Zaki and P. Yarsky Nuclear Regulatory Commission Office of Nuclear Regulatory Research U.S. Nuclear Regulatory Commission, MS CSB-3A07M,
USE OF WHITE NOISE IN TRACE/PARCS ANALYSIS OF ATWS WITH INSTABILITY T. Zaki and P. Yarsky Nuclear Regulatory Commission Office of Nuclear Regulatory Research U.S. Nuclear Regulatory Commission, MS CSB-3A07M,
Baseline UAV Controller Initial Thesis Report
 Baseline UAV Controller Initial Thesis Report Callum J. Newton 1 The development of a baseline Unmanned Aerial Vehicle (UAV) controller for use on the Australian Defence Force Academy s Telemaster UAV
Baseline UAV Controller Initial Thesis Report Callum J. Newton 1 The development of a baseline Unmanned Aerial Vehicle (UAV) controller for use on the Australian Defence Force Academy s Telemaster UAV
Digiflight II SERIES AUTOPILOTS
 Operating Handbook For Digiflight II SERIES AUTOPILOTS TRUTRAK FLIGHT SYSTEMS 1500 S. Old Missouri Road Springdale, AR 72764 Ph. 479-751-0250 Fax 479-751-3397 Toll Free: 866-TRUTRAK 866-(878-8725) www.trutrakap.com
Operating Handbook For Digiflight II SERIES AUTOPILOTS TRUTRAK FLIGHT SYSTEMS 1500 S. Old Missouri Road Springdale, AR 72764 Ph. 479-751-0250 Fax 479-751-3397 Toll Free: 866-TRUTRAK 866-(878-8725) www.trutrakap.com
Flight Dynamics AE426
 KING FAHD UNIVERSITY Department of Aerospace Engineering AE426: Flight Dynamics Instructor Dr. Ayman Hamdy Kassem What is flight dynamics? Is the study of aircraft motion and its characteristics. Is it
KING FAHD UNIVERSITY Department of Aerospace Engineering AE426: Flight Dynamics Instructor Dr. Ayman Hamdy Kassem What is flight dynamics? Is the study of aircraft motion and its characteristics. Is it
Position Control of DC Motor by Compensating Strategies
 Position Control of DC Motor by Compensating Strategies S Prem Kumar 1 J V Pavan Chand 1 B Pangedaiah 1 1. Assistant professor of Laki Reddy Balireddy College Of Engineering, Mylavaram Abstract - As the
Position Control of DC Motor by Compensating Strategies S Prem Kumar 1 J V Pavan Chand 1 B Pangedaiah 1 1. Assistant professor of Laki Reddy Balireddy College Of Engineering, Mylavaram Abstract - As the
Rotek AS440 compatible VOLTAGE REGULATOR (AVR)
") Rotek AS440 compatible VOLTAGE REGULATOR (AVR) SPECIFICATION INSTALLATION AND ADJUSTMENTS General description Technical specification AS440 is a half wave phase controlled thyristor type AVR and forms
Rotek AS440 compatible VOLTAGE REGULATOR (AVR) SPECIFICATION INSTALLATION AND ADJUSTMENTS General description Technical specification AS440 is a half wave phase controlled thyristor type AVR and forms
Operating Handbook For FD PILOT SERIES AUTOPILOTS
 Operating Handbook For FD PILOT SERIES AUTOPILOTS TRUTRAK FLIGHT SYSTEMS 1500 S. Old Missouri Road Springdale, AR 72764 Ph. 479-751-0250 Fax 479-751-3397 Toll Free: 866-TRUTRAK 866-(878-8725) www.trutrakap.com
Operating Handbook For FD PILOT SERIES AUTOPILOTS TRUTRAK FLIGHT SYSTEMS 1500 S. Old Missouri Road Springdale, AR 72764 Ph. 479-751-0250 Fax 479-751-3397 Toll Free: 866-TRUTRAK 866-(878-8725) www.trutrakap.com
Andrea Zanchettin Automatic Control 1 AUTOMATIC CONTROL. Andrea M. Zanchettin, PhD Winter Semester, Linear control systems design Part 1
 Andrea Zanchettin Automatic Control 1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Winter Semester, 2018 Linear control systems design Part 1 Andrea Zanchettin Automatic Control 2 Step responses Assume
Andrea Zanchettin Automatic Control 1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Winter Semester, 2018 Linear control systems design Part 1 Andrea Zanchettin Automatic Control 2 Step responses Assume
Temperature Control in HVAC Application using PID and Self-Tuning Adaptive Controller
 International Journal of Emerging Trends in Science and Technology Temperature Control in HVAC Application using PID and Self-Tuning Adaptive Controller Authors Swarup D. Ramteke 1, Bhagsen J. Parvat 2
International Journal of Emerging Trends in Science and Technology Temperature Control in HVAC Application using PID and Self-Tuning Adaptive Controller Authors Swarup D. Ramteke 1, Bhagsen J. Parvat 2
Module 2: Lecture 4 Flight Control System
 26 Guidance of Missiles/NPTEL/2012/D.Ghose Module 2: Lecture 4 Flight Control System eywords. Roll, Pitch, Yaw, Lateral Autopilot, Roll Autopilot, Gain Scheduling 3.2 Flight Control System The flight control
26 Guidance of Missiles/NPTEL/2012/D.Ghose Module 2: Lecture 4 Flight Control System eywords. Roll, Pitch, Yaw, Lateral Autopilot, Roll Autopilot, Gain Scheduling 3.2 Flight Control System The flight control
A COMPACT, AGILE, LOW-PHASE-NOISE FREQUENCY SOURCE WITH AM, FM AND PULSE MODULATION CAPABILITIES
 A COMPACT, AGILE, LOW-PHASE-NOISE FREQUENCY SOURCE WITH AM, FM AND PULSE MODULATION CAPABILITIES Alexander Chenakin Phase Matrix, Inc. 109 Bonaventura Drive San Jose, CA 95134, USA achenakin@phasematrix.com
A COMPACT, AGILE, LOW-PHASE-NOISE FREQUENCY SOURCE WITH AM, FM AND PULSE MODULATION CAPABILITIES Alexander Chenakin Phase Matrix, Inc. 109 Bonaventura Drive San Jose, CA 95134, USA achenakin@phasematrix.com
Design of FBW Flight Control Systems for Modern Combat Aircraft Shyam Chetty Former Director, CSIR-NAL Bangalore
 Design of FBW Flight Control Systems for Modern Combat Aircraft Shyam Chetty Former Director, CSIR-NAL Bangalore 1 IIT Dharwad 2018 1 ABOUT TEJAS Smallest, light-weight, supersonic aircraft Designed for
Design of FBW Flight Control Systems for Modern Combat Aircraft Shyam Chetty Former Director, CSIR-NAL Bangalore 1 IIT Dharwad 2018 1 ABOUT TEJAS Smallest, light-weight, supersonic aircraft Designed for
CHAPTER 5 AUTOMATIC LANDING SYSTEM
 117 CHAPTER 5 AUTOMATIC LANDING SYSTEM 51 INTRODUCTION The ultimate aim of both military and commercial aviation is allweather operation To achieve this goal, it should be possible to land the aircraft
117 CHAPTER 5 AUTOMATIC LANDING SYSTEM 51 INTRODUCTION The ultimate aim of both military and commercial aviation is allweather operation To achieve this goal, it should be possible to land the aircraft
Enhanced performance of delayed teleoperator systems operating within nondeterministic environments
 University of Wollongong Research Online University of Wollongong Thesis Collection 1954-2016 University of Wollongong Thesis Collections 2010 Enhanced performance of delayed teleoperator systems operating
University of Wollongong Research Online University of Wollongong Thesis Collection 1954-2016 University of Wollongong Thesis Collections 2010 Enhanced performance of delayed teleoperator systems operating
Variable Stability Flight Simulation in Aerospace Engineering Education
 Variable Stability Flight Simulation in Aerospace Engineering Education Dr Peter Gibbens, Mr Nathan Rickard The University of Sydney, Sydney, Australia pwg@aeroemech.usyd.edu.au nathan.rickard@aeromech.usyd.edu.au
Variable Stability Flight Simulation in Aerospace Engineering Education Dr Peter Gibbens, Mr Nathan Rickard The University of Sydney, Sydney, Australia pwg@aeroemech.usyd.edu.au nathan.rickard@aeromech.usyd.edu.au
Performance Characterization of IP Network-based Control Methodologies for DC Motor Applications Part II
 Performance Characterization of IP Network-based Control Methodologies for DC Motor Applications Part II Tyler Richards, Mo-Yuen Chow Advanced Diagnosis Automation and Control Lab Department of Electrical
Performance Characterization of IP Network-based Control Methodologies for DC Motor Applications Part II Tyler Richards, Mo-Yuen Chow Advanced Diagnosis Automation and Control Lab Department of Electrical
Copyrighted Material 1.1 INTRODUCTION
 ÔØ Ö ÇÒ Ì Ï Ò ÙÔ È ÒÓÑ ÒÓÒ Ò ÒØ ¹Û Ò ÙÔ ÁÐÐÙ ØÖ Ø 1.1 INTRODUCTION Every control system actuator has limited capabilities. A piezoelectric stack actuator cannot traverse an unlimited distance. A motor
ÔØ Ö ÇÒ Ì Ï Ò ÙÔ È ÒÓÑ ÒÓÒ Ò ÒØ ¹Û Ò ÙÔ ÁÐÐÙ ØÖ Ø 1.1 INTRODUCTION Every control system actuator has limited capabilities. A piezoelectric stack actuator cannot traverse an unlimited distance. A motor
Post-Installation Checkout All GRT EFIS Models
 GRT Autopilot Post-Installation Checkout All GRT EFIS Models April 2011 Grand Rapids Technologies, Inc. 3133 Madison Avenue SE Wyoming MI 49548 616-245-7700 www.grtavionics.com Intentionally Left Blank
GRT Autopilot Post-Installation Checkout All GRT EFIS Models April 2011 Grand Rapids Technologies, Inc. 3133 Madison Avenue SE Wyoming MI 49548 616-245-7700 www.grtavionics.com Intentionally Left Blank
CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING. Professor Dae Ryook Yang
 CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 11-1 Road Map of the Lecture XI Controller Design and PID
CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 11-1 Road Map of the Lecture XI Controller Design and PID
Aeromechanics Safety Support Team Providing Aeromechanical Engineering Resources and Support for Aircraft Incidents and Mishap Investigations
 Aeromechanics Safety Support Team Providing Aeromechanical Engineering Resources and Support for Aircraft Incidents and Mishap Investigations 200 MSDRS Reconstructed 150 100 50 0-50 -100-150 7.376 7.3765
Aeromechanics Safety Support Team Providing Aeromechanical Engineering Resources and Support for Aircraft Incidents and Mishap Investigations 200 MSDRS Reconstructed 150 100 50 0-50 -100-150 7.376 7.3765
PROCESS DYNAMICS AND CONTROL
 PROCESS DYNAMICS AND CONTROL CHBE306, Fall 2017 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering Korea University Korea University 1-1 Objectives of the Class What is process control?
PROCESS DYNAMICS AND CONTROL CHBE306, Fall 2017 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering Korea University Korea University 1-1 Objectives of the Class What is process control?
Implementation of decentralized active control of power transformer noise
 Implementation of decentralized active control of power transformer noise P. Micheau, E. Leboucher, A. Berry G.A.U.S., Université de Sherbrooke, 25 boulevard de l Université,J1K 2R1, Québec, Canada Philippe.micheau@gme.usherb.ca
Implementation of decentralized active control of power transformer noise P. Micheau, E. Leboucher, A. Berry G.A.U.S., Université de Sherbrooke, 25 boulevard de l Université,J1K 2R1, Québec, Canada Philippe.micheau@gme.usherb.ca
User Manual Version 1.0
 1 Thank you for purchasing our products. The A3 Pro SE controller is the updated version of A3 Pro. After a fully improvement and optimization of hardware and software, we make it lighter, smaller and
1 Thank you for purchasing our products. The A3 Pro SE controller is the updated version of A3 Pro. After a fully improvement and optimization of hardware and software, we make it lighter, smaller and
Chapter 6 Controller Design Using Design Tools
 Chapter 6 Controller Design Using Design Tools Defining Good Process Test Data The process should be at steady state before data collection starts The test dynamics should clearly dominate the process
Chapter 6 Controller Design Using Design Tools Defining Good Process Test Data The process should be at steady state before data collection starts The test dynamics should clearly dominate the process
PROCESS DYNAMICS AND CONTROL
 Objectives of the Class PROCESS DYNAMICS AND CONTROL CHBE320, Spring 2018 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering What is process control? Basics of process control Basic hardware
Objectives of the Class PROCESS DYNAMICS AND CONTROL CHBE320, Spring 2018 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering What is process control? Basics of process control Basic hardware
Jager UAVs to Locate GPS Interference
 JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
JIFX 16-1 2-6 November 2015 Camp Roberts, CA Jager UAVs to Locate GPS Interference Stanford GPS Research Laboratory and the Stanford Intelligent Systems Lab Principal Investigator: Sherman Lo, PhD Area
Arvind Pahade and Nitin Saxena Department of Electrical Engineering, Jabalpur Engineering College, Jabalpur, (MP), India
, India") e t International Journal on Emerging Technologies 4(1): 10-16(2013) ISSN No. (Print) : 0975-8364 ISSN No. (Online) : 2249-3255 Control of Synchronous Generator Excitation and Rotor Angle Stability by
e t International Journal on Emerging Technologies 4(1): 10-16(2013) ISSN No. (Print) : 0975-8364 ISSN No. (Online) : 2249-3255 Control of Synchronous Generator Excitation and Rotor Angle Stability by
Lecture 48 Review of Feedback HW # 4 Erickson Problems Ch. 9 # s 7 &9 and questions in lectures I. Review of Negative Feedback
 Lecture 48 Review of Feedback HW # 4 Erickson Problems Ch. 9 # s 7 &9 and questions in lectures I. Review of Negative Feedback A. General. Overview 2. Summary of Advantages 3. Disadvantages B. Buck Converter
Lecture 48 Review of Feedback HW # 4 Erickson Problems Ch. 9 # s 7 &9 and questions in lectures I. Review of Negative Feedback A. General. Overview 2. Summary of Advantages 3. Disadvantages B. Buck Converter
Application of Artificial Neural Network for the Prediction of Aerodynamic Coefficients of a Plunging Airfoil
 International Journal of Science and Engineering Investigations vol 1, issue 1, February 212 Application of Artificial Neural Network for the Prediction of Aerodynamic Coefficients of a Plunging Airfoil
International Journal of Science and Engineering Investigations vol 1, issue 1, February 212 Application of Artificial Neural Network for the Prediction of Aerodynamic Coefficients of a Plunging Airfoil
University of Bristol - Explore Bristol Research. Peer reviewed version. Link to published version (if available): /6.
: /6.") Araujo-Estrada, S., Gong, Z., Lowenberg, M., Neild, S., & Goman, M. (216). Wind tunnel manoeuvre rig: a multi-dof test platform for model aircraft. In 54th AIAA Aerospace Sciences Meeting [AIAA 216-2119]
Araujo-Estrada, S., Gong, Z., Lowenberg, M., Neild, S., & Goman, M. (216). Wind tunnel manoeuvre rig: a multi-dof test platform for model aircraft. In 54th AIAA Aerospace Sciences Meeting [AIAA 216-2119]
FLIGHT TEST VALIDATION OF OPTIMAL INPUT DESIGN AND COMPARISON TO CONVENTIONAL INPUTS
 FLIGHT TEST VALIDATION OF OPTIMAL INPUT DESIGN AND COMPARISON TO CONVENTIONAL INPUTS Eugene A. Morelli* NASA Langley Research Center Hampton, Virginia USA - Abstract A technique for designing optimal inputs
FLIGHT TEST VALIDATION OF OPTIMAL INPUT DESIGN AND COMPARISON TO CONVENTIONAL INPUTS Eugene A. Morelli* NASA Langley Research Center Hampton, Virginia USA - Abstract A technique for designing optimal inputs
University Perspective on Elements of a Research Support Program
 University Perspective on Elements of a Research Support Program Helen L. Reed, Texas A&M University Karen Feigh, Georgia Tech Ella Atkins, University of Michigan Focus Session on ARMD and Supporting University
University Perspective on Elements of a Research Support Program Helen L. Reed, Texas A&M University Karen Feigh, Georgia Tech Ella Atkins, University of Michigan Focus Session on ARMD and Supporting University
Design of a Miniature Aircraft Deployment System
 Project Customer Prof. Eric Frew Project Advisors Prof. Bill Emery Prof. Kurt Maute Design of a Miniature Aircraft Deployment System http://www.colorado.edu/aerospace/mads Leah Crumbaker Jason Farmer Michael
Project Customer Prof. Eric Frew Project Advisors Prof. Bill Emery Prof. Kurt Maute Design of a Miniature Aircraft Deployment System http://www.colorado.edu/aerospace/mads Leah Crumbaker Jason Farmer Michael
Hardware-in-the-Loop Simulation for a Small Unmanned Aerial Vehicle A. Shawky *, A. Bayoumy Aly, A. Nashar, and M. Elsayed
 16 th International Conference on AEROSPACE SCIENCES & AVIATION TECHNOLOGY, ASAT - 16 May 26-28, 2015, E-Mail: asat@mtc.edu.eg Military Technical College, Kobry Elkobbah, Cairo, Egypt Tel : +(202) 24025292
16 th International Conference on AEROSPACE SCIENCES & AVIATION TECHNOLOGY, ASAT - 16 May 26-28, 2015, E-Mail: asat@mtc.edu.eg Military Technical College, Kobry Elkobbah, Cairo, Egypt Tel : +(202) 24025292
CDS 101/110: Lecture 8.2 PID Control
 CDS 11/11: Lecture 8.2 PID Control November 16, 216 Goals: Nyquist Example Introduce and review PID control. Show how to use loop shaping using PID to achieve a performance specification Discuss the use
CDS 11/11: Lecture 8.2 PID Control November 16, 216 Goals: Nyquist Example Introduce and review PID control. Show how to use loop shaping using PID to achieve a performance specification Discuss the use
Frequency-Domain System Identification and Simulation of a Quadrotor Controller
 AIAA SciTech 13-17 January 2014, National Harbor, Maryland AIAA Modeling and Simulation Technologies Conference AIAA 2014-1342 Frequency-Domain System Identification and Simulation of a Quadrotor Controller
AIAA SciTech 13-17 January 2014, National Harbor, Maryland AIAA Modeling and Simulation Technologies Conference AIAA 2014-1342 Frequency-Domain System Identification and Simulation of a Quadrotor Controller
HARMONIZING AUTOMATION, PILOT, AND AIR TRAFFIC CONTROLLER IN THE FUTURE AIR TRAFFIC MANAGEMENT
 26 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES HARMONIZING AUTOMATION, PILOT, AND AIR TRAFFIC CONTROLLER IN THE FUTURE AIR TRAFFIC MANAGEMENT Eri Itoh*, Shinji Suzuki**, and Vu Duong*** * Electronic
26 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES HARMONIZING AUTOMATION, PILOT, AND AIR TRAFFIC CONTROLLER IN THE FUTURE AIR TRAFFIC MANAGEMENT Eri Itoh*, Shinji Suzuki**, and Vu Duong*** * Electronic
Development of a Forced Oscillation System for Measuring Dynamic Derivatives of Fluidic Vehicles
 Development of a Forced Oscillation System for Measuring Dynamic Derivatives of Fluidic Vehicles B. C. Trieu, T. R. Tyler*, 6. K. Stewa3, J. K. Charnock, D. W. Fisher*, E. H. Heim, J. Brandon, and S. 6.
Development of a Forced Oscillation System for Measuring Dynamic Derivatives of Fluidic Vehicles B. C. Trieu, T. R. Tyler*, 6. K. Stewa3, J. K. Charnock, D. W. Fisher*, E. H. Heim, J. Brandon, and S. 6.
Linear Control Systems Lectures #5 - PID Controller. Guillaume Drion Academic year
 Linear Control Systems Lectures #5 - PID Controller Guillaume Drion Academic year 2018-2019 1 Outline PID controller: general form Effects of the proportional, integral and derivative actions PID tuning
Linear Control Systems Lectures #5 - PID Controller Guillaume Drion Academic year 2018-2019 1 Outline PID controller: general form Effects of the proportional, integral and derivative actions PID tuning
The Active Flutter Suppression (AFS) Technology Evaluation Project
 Technology Evaluation Project") 1 The Active Flutter Suppression (AFS) Technology Evaluation Project Eli Livne, Ph.D. The William E. Boeing Department of Aeronautics and Astronautics University of Washington, Seattle, WA eli@aa.washington.edu
1 The Active Flutter Suppression (AFS) Technology Evaluation Project Eli Livne, Ph.D. The William E. Boeing Department of Aeronautics and Astronautics University of Washington, Seattle, WA eli@aa.washington.edu
Optimal Control System Design
 Chapter 6 Optimal Control System Design 6.1 INTRODUCTION The active AFO consists of sensor unit, control system and an actuator. While designing the control system for an AFO, a trade-off between the transient
Chapter 6 Optimal Control System Design 6.1 INTRODUCTION The active AFO consists of sensor unit, control system and an actuator. While designing the control system for an AFO, a trade-off between the transient
OughtToPilot. Project Report of Submission PC128 to 2008 Propeller Design Contest. Jason Edelberg
 OughtToPilot Project Report of Submission PC128 to 2008 Propeller Design Contest Jason Edelberg Table of Contents Project Number.. 3 Project Description.. 4 Schematic 5 Source Code. Attached Separately
OughtToPilot Project Report of Submission PC128 to 2008 Propeller Design Contest Jason Edelberg Table of Contents Project Number.. 3 Project Description.. 4 Schematic 5 Source Code. Attached Separately
IMPORTANCE OF VSC IN HVDC
 IMPORTANCE OF VSC IN HVDC Snigdha Sharma (Electrical Department, SIT, Meerut) ABSTRACT The demand of electrical energy has been increasing day by day. To meet these high demands, reliable and stable transmission
IMPORTANCE OF VSC IN HVDC Snigdha Sharma (Electrical Department, SIT, Meerut) ABSTRACT The demand of electrical energy has been increasing day by day. To meet these high demands, reliable and stable transmission
The PID controller. Summary. Introduction to Control Systems
 The PID controller ISTTOK real-time AC 7-10-2010 Summary Introduction to Control Systems PID Controller PID Tuning Discrete-time Implementation The PID controller 2 Introduction to Control Systems Some
The PID controller ISTTOK real-time AC 7-10-2010 Summary Introduction to Control Systems PID Controller PID Tuning Discrete-time Implementation The PID controller 2 Introduction to Control Systems Some
412 th Test Wing. War-Winning Capabilities On Time, On Cost. Lessons Learned While Giving Unaugmented Airplanes to Augmentation-Dependent Pilots
 412 th Test Wing War-Winning Capabilities On Time, On Cost Lessons Learned While Giving Unaugmented Airplanes to Augmentation-Dependent Pilots 20 Nov 2012 Bill Gray USAF TPS/CP Phone: 661-277-2761 Approved
412 th Test Wing War-Winning Capabilities On Time, On Cost Lessons Learned While Giving Unaugmented Airplanes to Augmentation-Dependent Pilots 20 Nov 2012 Bill Gray USAF TPS/CP Phone: 661-277-2761 Approved
Automatic Controller Dynamic Specification (Summary of Version 1.0, 11/93)
") The contents of this document are copyright EnTech Control Engineering Inc., and may not be reproduced or retransmitted in any form without the express consent of EnTech Control Engineering Inc. Automatic
The contents of this document are copyright EnTech Control Engineering Inc., and may not be reproduced or retransmitted in any form without the express consent of EnTech Control Engineering Inc. Automatic
PI Tuning via Extremum Seeking Methods for Cruise Control
 ME 569 Control of Advanced Powertrain Systems PI Tuning via Extremum Seeking Methods for Cruise Control Yiyao(Andy) Chang, Scott Moura ABSTRACT In this study, we reproduce the results from an existing
ME 569 Control of Advanced Powertrain Systems PI Tuning via Extremum Seeking Methods for Cruise Control Yiyao(Andy) Chang, Scott Moura ABSTRACT In this study, we reproduce the results from an existing
Energy-Based Damping Evaluation for Exciter Control in Power Systems
 Energy-Based Damping Evaluation for Exciter Control in Power Systems Luoyang Fang 1, Dongliang Duan 2, Liuqing Yang 1 1 Department of Electrical & Computer Engineering Colorado State University, Fort Collins,
Energy-Based Damping Evaluation for Exciter Control in Power Systems Luoyang Fang 1, Dongliang Duan 2, Liuqing Yang 1 1 Department of Electrical & Computer Engineering Colorado State University, Fort Collins,
NASA Technology Road Map: Materials and Structures. R. Byron Pipes
 NASA Technology Road Map: Materials and Structures R. Byron Pipes John L. Bray Distinguished Professor of Engineering School of Materials Engineering, Purdue University bpipes@purdue.edu PMMS Center 1
NASA Technology Road Map: Materials and Structures R. Byron Pipes John L. Bray Distinguished Professor of Engineering School of Materials Engineering, Purdue University bpipes@purdue.edu PMMS Center 1
FAULT DIAGNOSIS AND RECONFIGURATION IN FLIGHT CONTROL SYSTEMS
 FAULT DIAGNOSIS AND RECONFIGURATION IN FLIGHT CONTROL SYSTEMS by CHINGIZ HAJIYEV Istanbul Technical University, Turkey and FIKRET CALISKAN Istanbul Technical University, Turkey Kluwer Academic Publishers
FAULT DIAGNOSIS AND RECONFIGURATION IN FLIGHT CONTROL SYSTEMS by CHINGIZ HAJIYEV Istanbul Technical University, Turkey and FIKRET CALISKAN Istanbul Technical University, Turkey Kluwer Academic Publishers
Lecture 10. Lab next week: Agenda: Control design fundamentals. Proportional Control Proportional-Integral Control
 264 Lab next week: Lecture 10 Lab 17: Proportional Control Lab 18: Proportional-Integral Control (1/2) Agenda: Control design fundamentals Objectives (Tracking, disturbance/noise rejection, robustness)
264 Lab next week: Lecture 10 Lab 17: Proportional Control Lab 18: Proportional-Integral Control (1/2) Agenda: Control design fundamentals Objectives (Tracking, disturbance/noise rejection, robustness)
4. Simulation Results
 4. Simulation Results An application of the computer aided control design of a starter/generator PMSM drive system discussed in Chapter 3, Figure 13, is presented in this chapter. A load torque profile
4. Simulation Results An application of the computer aided control design of a starter/generator PMSM drive system discussed in Chapter 3, Figure 13, is presented in this chapter. A load torque profile
MANAGING PERFORMANCE DEGRADATION IN FAULT TOLERANT CONTROL SYSTEMS
 MANAGING PERORMANCE DEGRADATION IN AULT TOLERANT CONTROL SYSTEMS Youmin Zhang,JinJiang,ZhenyuYang, Akbar Hussain Dept. of Computer Science and Engineering, Aalborg University Esberg, Niels Bohrs Ve, 7
MANAGING PERORMANCE DEGRADATION IN AULT TOLERANT CONTROL SYSTEMS Youmin Zhang,JinJiang,ZhenyuYang, Akbar Hussain Dept. of Computer Science and Engineering, Aalborg University Esberg, Niels Bohrs Ve, 7
and using the step routine on the closed loop system shows the step response to be less than the maximum allowed 20%.
 Phase (deg); Magnitude (db) 385 Bode Diagrams 8 Gm = Inf, Pm=59.479 deg. (at 62.445 rad/sec) 6 4 2-2 -4-6 -8-1 -12-14 -16-18 1-1 1 1 1 1 2 1 3 and using the step routine on the closed loop system shows
Phase (deg); Magnitude (db) 385 Bode Diagrams 8 Gm = Inf, Pm=59.479 deg. (at 62.445 rad/sec) 6 4 2-2 -4-6 -8-1 -12-14 -16-18 1-1 1 1 1 1 2 1 3 and using the step routine on the closed loop system shows
Chapter 2 MODELING AND CONTROL OF PEBB BASED SYSTEMS
 Chapter 2 MODELING AND CONTROL OF PEBB BASED SYSTEMS 2.1 Introduction The PEBBs are fundamental building cells, integrating state-of-the-art techniques for large scale power electronics systems. Conventional
Chapter 2 MODELING AND CONTROL OF PEBB BASED SYSTEMS 2.1 Introduction The PEBBs are fundamental building cells, integrating state-of-the-art techniques for large scale power electronics systems. Conventional
Modeling and Simulation Made Easy with Simulink Carlos Osorio Principal Application Engineer MathWorks Natick, MA
 Modeling and Simulation Made Easy with Simulink Carlos Osorio Principal Application Engineer MathWorks Natick, MA 2013 The MathWorks, Inc. 1 Questions covered in this presentation 1. Why do we do modeling
Modeling and Simulation Made Easy with Simulink Carlos Osorio Principal Application Engineer MathWorks Natick, MA 2013 The MathWorks, Inc. 1 Questions covered in this presentation 1. Why do we do modeling
Real Time Data Validation Embedded System for Flight Test Using Common Portable Devices
 Real Time Data Validation Embedded System for Flight Test Using Common Portable Devices A. MSc. Andre Yoshimi Kusumoto 1, B. Eng Wagner Oliveira Lima 1, C. Dr. Nelson Paiva Oliveira Leite 1 Instituto de
Real Time Data Validation Embedded System for Flight Test Using Common Portable Devices A. MSc. Andre Yoshimi Kusumoto 1, B. Eng Wagner Oliveira Lima 1, C. Dr. Nelson Paiva Oliveira Leite 1 Instituto de
A Real-Time Regulator, Turbine and Alternator Test Bench for Ensuring Generators Under Test Contribute to Whole System Stability
 A Real-Time Regulator, Turbine and Alternator Test Bench for Ensuring Generators Under Test Contribute to Whole System Stability Marc Langevin, eng., Ph.D.*. Marc Soullière, tech.** Jean Bélanger, eng.***
A Real-Time Regulator, Turbine and Alternator Test Bench for Ensuring Generators Under Test Contribute to Whole System Stability Marc Langevin, eng., Ph.D.*. Marc Soullière, tech.** Jean Bélanger, eng.***
Development of Hybrid Flight Simulator with Multi Degree-of-Freedom Robot
 Development of Hybrid Flight Simulator with Multi Degree-of-Freedom Robot Kakizaki Kohei, Nakajima Ryota, Tsukabe Naoki Department of Aerospace Engineering Department of Mechanical System Design Engineering
Development of Hybrid Flight Simulator with Multi Degree-of-Freedom Robot Kakizaki Kohei, Nakajima Ryota, Tsukabe Naoki Department of Aerospace Engineering Department of Mechanical System Design Engineering
Fokker 50 - Automatic Flight Control System
 GENERAL The Automatic Flight Control System (AFCS) controls the aircraft around the pitch, roll, and yaw axes. The system consists of: Two Flight Directors (FD). Autopilot (AP). Flight Augmentation System
GENERAL The Automatic Flight Control System (AFCS) controls the aircraft around the pitch, roll, and yaw axes. The system consists of: Two Flight Directors (FD). Autopilot (AP). Flight Augmentation System