Haptic Communication for the Tactile Internet
|
|
|
- Brent Kelley
- 5 years ago
- Views:
Transcription

1 Technical University of Munich (TUM) Chair of Media Technology European Wireless, EW 17 Dresden, May 17, 2017


2 Telepresence Network audiovisual communication Although conversational services are bidirectional, audiovisual data communication is 2x unidirectional 2



![2005; Tholey et al. 2005; Hokayem et al. 2006; El Saddik 2007] R. Ferrell and T. B.](/docs-images/86/94288024/images/3-3.jpg "Sheridan, Supervisory control of remote manipulation, IEEE Spectrum, vol. 4, no. 10, pp.")
3 Telepresence + Haptics = Teleoperation Local Control Loop Local Control Loop Network Sensors & Actuators Operator with Human-System-Interface audio-visual-haptic communication Teleoperator in remote environment Operator performance increases significantly in telemanipulation of remote objects when haptic feedback is provided Haptic communication is by definition bidirectional [Cohen Loeb 1983; Hannaford et al. 1993; Hirzinger et al. 1994; Srinisavan et al. 1997; Dennerlein et al. 2000; Basdogan et al. 2000; Cockburn et al. 2005; Tholey et al. 2005; Hokayem et al. 2006; El Saddik 2007] R. Ferrell and T. B. Sheridan, Supervisory control of remote manipulation, IEEE Spectrum, vol. 4, no. 10, pp , October

4 In this talk: Human-in-the-loop TI Focus is on Quality of Interaction Remote environment can be real or virtual 4


5 Haptics Kinesthetic Perception Tactile Perception Image Source: Katsunari Sato, Dept. of MEIP, The University of Tokyo/Japan position & forces sense of touch of the skin Perception of form, position, surface texture, stiffness, friction, temperature, etc. 5



6 Teleoperation with kinesthetic feedback Position / Velocity Network Operator Force / Torque Feedback Teleoperator Closed loop communication Hz sampling/packet rate Very strict delay constraints (< 10ms) Lack of realism (hard contacts / surface details) 6

7 Demo: Strict delay constraint Operator Force Feedback Teleoperator 7
8 Teleoperation with tactile feedback Open loop communication Relaxed delay constraints Improved realism 8
9 Communication of kinesthetic/tactile data Communication of kinesthetic information Communication of tactile information 9
 leads to a")
![variable packet rate event-based sampling and communication Transmitted signal update [1] P. Hinterseer, S. Hirche, S. Chaudhuri, E. Steinbach, and M.](/docs-images/86/94288024/images/10-1.jpg "Buss, Perception-Based Data Reduction and Transmission of Haptic Data in Telepresence and Teleaction Systems, IEEE Trans. Signal Process., vol. 56, no. 2, pp.")
10 Communication of kinesthetic data: Packet rate reduction position/velocity local control kinesthetic signals (forces, torques) + audio + video local control Perceptual haptic data reduction [1] exploits limits of human haptic perception packet rate reduction of up to 90% (no perceivable distortion) leads to a variable packet rate event-based sampling and communication Transmitted signal update [1] P. Hinterseer, S. Hirche, S. Chaudhuri, E. Steinbach, and M. Buss, Perception-Based Data Reduction and Transmission of Haptic Data in Telepresence and Teleaction Systems, IEEE Trans. Signal Process., vol. 56, no. 2, pp , Feb t 10
11 Communication of kinesthetic data: Time-delayed teleoperation delay damping (control) transparency 11
 passivity observer force operator /master pos./vel.")
12 Time-delayed Teleoperation: Passivity-based J. Ryu, J. Artigas and C. Preusche, 1994 B. Hannaford, and J. Ryu, 2002 video/audio T b video/audio force passivity observer network (delay) passivity observer force operator /master pos./vel. m E T f s E pos./vel. teleoperator /slave Stable haptic interaction for delays 10ms 100ms Energy dissipation leads to reduced transparency 12
13 Time-delayed Teleoperation: Model-mediated B. Hannaford, 1989 P. Mitra and G. Niemeyer, 2008 B. Willaert, J. Bohg, H. Brussel and G. Niemeyer, 2012 video/audio model parameters video/audio force local model no delay pos./vel. local haptic loop T b network (delay) T f env. modeling force sensor data pos./vel. teleoperator /slave Stable haptic interaction for delays 10ms 200ms Model errors / updates lead to reduced transparency 13

14 Demo: TDPA + Perceptual coding für different RTT 14

15 Control & communication for different delay ranges 15
16 Joint optimization of communication and control Experience (QoE) Task Performance (QoTP) models and metrics models and metrics joint optimization Application models and metrics models and metrics Control (QoC) Network (QoS) Joint optimization including the knowledge about the human user 16
")
17 Shared Haptic Virtual Environments (SHVEs) 17
18 Example: Physical coupling of two users in a VE Joint work with W. Kellerer and his team (LKN@TUM) 18
19 Communication of kinesthetic/tactile data Communication of kinesthetic information Communication of tactile information 19

20 Vibrotactile communication 20
21 Communication of tactile information Vibrotactile signals are similar to speech signals Perceptual model R. Chaudhari et al., IEEE JSTSP

22 Sine detection thresholds and masking custom-made stylus-like handle mounted on Mini SmartShaker TM R. Chaudhari et al., IEEE JSTSP

23 Surface Material Perception Source: Okamoto et al.,


24 Surface Analysis Devices 24

25 Surface Analysis Devices 25

26 Tactile feedback displays: Electrovibration-based 26

27 Tactile feedback displays: Tactile Mouse 27
28 What about video? [1] C. Bachhuber and E. Steinbach: A System for High Precision Glass-to-Glass Measurements in Video Communication, ICIP




29 Measuring G2G delay Build instructions, Android Application and Arduino source code are available under Source: Source: (TUM) 29

30 G2G Delay Survey: Results Video conferencing systems G2G delay > 200ms 30
 FatShark analog 28ms FatShark digital 55ms Source: www.droneuplift.")
31 G2G Delay Survey: Results Video feedback in drone remote control DJI > 250ms (focus on high quality and reliability) FatShark analog 28ms FatShark digital 55ms Source: 31

32 G2G Delay Survey: Results Source: Smartphones camera app ms 32
33 G2G Delay Survey: Results Ultra-low delay solution 15ms (uncompressed video) 19ms (compressed video) 33
34 Demo video 34

35 Standardization 35
36 Task Group: Haptic Codecs for the Tactile Internet IEEE P Chair: (TUM), Vice Chair: Mohammad Eid (NYUAD), Secretary: Qian Liu (Dalian Univ.) Scope Protocol for the exchange of device capabilities (handshaking) (Perceptual) codec for closed-loop kinesthetic information (Perceptual) codec for open-loop tactile information 36
37 Summary Haptic communication as a key technology for physical interaction across networks Fundamental difference between kinesthetic interaction (closed-loop) and tactile feedback (open-loop) Compression of kinesthetic data fundamentally different from A/V Time-delayed teleoperation requires joint optimization of communication, compression and control Different control approaches for different delay ranges Tactile feedback displays open new opportunities G2G delay of video communication solutions needs to be further reduced 37
38 Acknowledgments Current and former PhD students: P. Hinterseer, J. Kammerl, F. Brandi, R. Chaudhari, X. Xu, B. Cizmeci, C. Schuwerk, Matti Strese Collaborators S. Chaudhuri (IIT Bombay) S. Hirche, M. Buss and I. Vittorias (TUM) B. Färber and V. Nitsch (University of Armed Forces Munich) A. El Saddik and J. Cha (University of Ottawa) K. Kuchenbecker (University of Pennsylvania) S. Choi (POSTECH, Korea) Funding DFG SFB 453, DFG STE 1093/4-1, 1093/4-2, 1093/6-1 ERC Grant ProHaptics European-Brazilian Network for Academic Exchange EUBRANEX 38
39 The end Thank you! 39
5G Tactile Internet Lab King s
 5G Tactile Internet Lab Experimentation @ King s Mischa Dohler Fellow, IEEE & Royal Society of Arts Director, Centre for Telecom Research Chair Professor, King's College London Cofounder, Worldsensing
5G Tactile Internet Lab Experimentation @ King s Mischa Dohler Fellow, IEEE & Royal Society of Arts Director, Centre for Telecom Research Chair Professor, King's College London Cofounder, Worldsensing
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
AHAPTIC interface is a kinesthetic link between a human
 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 13, NO. 5, SEPTEMBER 2005 737 Time Domain Passivity Control With Reference Energy Following Jee-Hwan Ryu, Carsten Preusche, Blake Hannaford, and Gerd
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 13, NO. 5, SEPTEMBER 2005 737 Time Domain Passivity Control With Reference Energy Following Jee-Hwan Ryu, Carsten Preusche, Blake Hannaford, and Gerd
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
MEAM 520. Haptic Rendering and Teleoperation
 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520. Haptic Rendering and Teleoperation
 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
Passive Bilateral Teleoperation
 Passive Bilateral Teleoperation Project: Reconfigurable Control of Robotic Systems Over Networks Márton Lırinc Dept. Of Electrical Engineering Sapientia University Overview What is bilateral teleoperation?
Passive Bilateral Teleoperation Project: Reconfigurable Control of Robotic Systems Over Networks Márton Lırinc Dept. Of Electrical Engineering Sapientia University Overview What is bilateral teleoperation?
Towards an Objective Quality Evaluation Framework for Haptic Data Reduction
 Towards an Objective Quality Evaluation Framework for Haptic Data Reduction Rahul Chaudhari, Eckehard Steinbach, and Sandra Hirche Institute for Media Technology, Technische Universität München, Germany
Towards an Objective Quality Evaluation Framework for Haptic Data Reduction Rahul Chaudhari, Eckehard Steinbach, and Sandra Hirche Institute for Media Technology, Technische Universität München, Germany
From Encoding Sound to Encoding Touch
 From Encoding Sound to Encoding Touch Toktam Mahmoodi King s College London, UK http://www.ctr.kcl.ac.uk/toktam/index.htm ETSI STQ Workshop, May 2017 Immersing a person into the real environment with Very
From Encoding Sound to Encoding Touch Toktam Mahmoodi King s College London, UK http://www.ctr.kcl.ac.uk/toktam/index.htm ETSI STQ Workshop, May 2017 Immersing a person into the real environment with Very
Haptic Data Compression Based on a Linear Prediction Model and Quadratic Curve Reconstruction
 2796 JOURNAL OF SOFTWARE, VOL. 9, NO., NOVEMBER 204 Haptic Data Compression Based on a Linear Prediction Model and Quadratic Curve Reconstruction Fenghua Guo School of Computer Science and Technology,
2796 JOURNAL OF SOFTWARE, VOL. 9, NO., NOVEMBER 204 Haptic Data Compression Based on a Linear Prediction Model and Quadratic Curve Reconstruction Fenghua Guo School of Computer Science and Technology,
Point Cloud-based Model-mediated Teleoperation with Dynamic and Perception-based Model Updating
 Preliminary version for evaluation: Please do not circulate without the permission of the author(s) Point Cloud-based Model-mediated Teleoperation with Dynamic and Perception-based Model Updating Xiao
Preliminary version for evaluation: Please do not circulate without the permission of the author(s) Point Cloud-based Model-mediated Teleoperation with Dynamic and Perception-based Model Updating Xiao
FORCE-FEEDBACK TELEOPERATION OF ON-GROUND ROBOTS FROM THE INTERNATIONAL SPACE STATION IN THE FRAME OF THE KONTUR-2 EXPERIMENT
 J. Artigas (1), C. Riecke (1), B. Weber (1), M. Stelzer (1), R. Balachandran (1), S. Schaetzle (1), R. Bayer (1), M. Steinmetz (1), J. Voegl (1), B. Brunner (1), A. Albu-Schaeffer (1), M. Guk (2),V. Zaborovskyi
J. Artigas (1), C. Riecke (1), B. Weber (1), M. Stelzer (1), R. Balachandran (1), S. Schaetzle (1), R. Bayer (1), M. Steinmetz (1), J. Voegl (1), B. Brunner (1), A. Albu-Schaeffer (1), M. Guk (2),V. Zaborovskyi
Haptic Tele-Assembly over the Internet
 Haptic Tele-Assembly over the Internet Sandra Hirche, Bartlomiej Stanczyk, and Martin Buss Institute of Automatic Control Engineering, Technische Universität München D-829 München, Germany, http : //www.lsr.ei.tum.de
Haptic Tele-Assembly over the Internet Sandra Hirche, Bartlomiej Stanczyk, and Martin Buss Institute of Automatic Control Engineering, Technische Universität München D-829 München, Germany, http : //www.lsr.ei.tum.de
phri: specialization groups HS PRELIMINARY
 phri: specialization groups HS 2019 - PRELIMINARY 1) VELOCITY ESTIMATION WITH HALL EFFECT SENSOR 2) VELOCITY MEASUREMENT: TACHOMETER VS HALL SENSOR 3) POSITION AND VELOCTIY ESTIMATION BASED ON KALMAN FILTER
phri: specialization groups HS 2019 - PRELIMINARY 1) VELOCITY ESTIMATION WITH HALL EFFECT SENSOR 2) VELOCITY MEASUREMENT: TACHOMETER VS HALL SENSOR 3) POSITION AND VELOCTIY ESTIMATION BASED ON KALMAN FILTER
Opportunistic Adaptive Haptic Sampling on Forward Channel in Telehaptic Communication
 Opportunistic Adaptive Haptic Sampling on Forward Channel in Telehaptic Communication Vineet Gokhale Jayakrishnan Nair Subhasis Chaudhuri Indian Institute of Technology Bombay Abstract We propose a network-based
Opportunistic Adaptive Haptic Sampling on Forward Channel in Telehaptic Communication Vineet Gokhale Jayakrishnan Nair Subhasis Chaudhuri Indian Institute of Technology Bombay Abstract We propose a network-based
Capacity Building and the Tactile Internet
 Capacity Building and the Tactile Internet Dr. Oliver Holland, Prof. Mischa Dohler, King s College London, UK CBS-2016, Nairobi, Kenya, 6-8 September 2016 What is the Tactile Internet? Current Internet
Capacity Building and the Tactile Internet Dr. Oliver Holland, Prof. Mischa Dohler, King s College London, UK CBS-2016, Nairobi, Kenya, 6-8 September 2016 What is the Tactile Internet? Current Internet
Haptics CS327A
 Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Model-Mediated Teleoperation for Multi-Operator Multi-Robot Systems
 The 00 IEEE/RSJ International Conference on Intelligent Robots and Systems October 8-, 00, Taipei, Taiwan Model-Mediated Teleoperation for Multi-Operator Multi-Robot Systems Carolina Passenberg*, Angelika
The 00 IEEE/RSJ International Conference on Intelligent Robots and Systems October 8-, 00, Taipei, Taiwan Model-Mediated Teleoperation for Multi-Operator Multi-Robot Systems Carolina Passenberg*, Angelika
Can We Improve Over Weber Sampling of Haptic Signals?
 Can We Improve Over Weber Sampling of Haptic Signals? Amit Bhardwaj Dept. of Electrical Engineering IIT Bombay Mumbai e-mail: bhardwajamit@ee.iitb.ac.in Onkar Dabeer School of Technology and Computer Science
Can We Improve Over Weber Sampling of Haptic Signals? Amit Bhardwaj Dept. of Electrical Engineering IIT Bombay Mumbai e-mail: bhardwajamit@ee.iitb.ac.in Onkar Dabeer School of Technology and Computer Science
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
VIRTUAL REALITY Introduction. Emil M. Petriu SITE, University of Ottawa
 VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
Lecture 6: Kinesthetic haptic devices: Control
 ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 6: Kinesthetic haptic devices: Control Allison M. Okamura Stanford University important stability concepts instability / limit cycle oscillation
ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 6: Kinesthetic haptic devices: Control Allison M. Okamura Stanford University important stability concepts instability / limit cycle oscillation
Haptic Sensing and Perception for Telerobotic Manipulation
 Haptic Sensing and Perception for Telerobotic Manipulation Emil M. Petriu, Dr. Eng., P.Eng., FIEEE Professor School of Information Technology and Engineering University of Ottawa Ottawa, ON., K1N 6N5 Canada
Haptic Sensing and Perception for Telerobotic Manipulation Emil M. Petriu, Dr. Eng., P.Eng., FIEEE Professor School of Information Technology and Engineering University of Ottawa Ottawa, ON., K1N 6N5 Canada
Transparent Data Reduction in. Networked Telepresence and Teleaction. Systems Part II: Time-Delayed Communication
 Title page for Transparent Data Reduction in Networked Telepresence and Teleaction Systems Part II: Time-Delayed Communication Authors: Sandra Hirche 0 Martin Buss Affiliation: Institute of Automatic Control
Title page for Transparent Data Reduction in Networked Telepresence and Teleaction Systems Part II: Time-Delayed Communication Authors: Sandra Hirche 0 Martin Buss Affiliation: Institute of Automatic Control
A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
 International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
CHAPTER 2. RELATED WORK 9 similar study, Gillespie (1996) built a one-octave force-feedback piano keyboard to convey forces derived from this model to
 built a one-octave force-feedback piano keyboard to convey forces derived from this model to") Chapter 2 Related Work 2.1 Haptic Feedback in Music Controllers The enhancement of computer-based instrumentinterfaces with haptic feedback dates back to the late 1970s, when Claude Cadoz and his colleagues
Chapter 2 Related Work 2.1 Haptic Feedback in Music Controllers The enhancement of computer-based instrumentinterfaces with haptic feedback dates back to the late 1970s, when Claude Cadoz and his colleagues
Proprioception & force sensing
 Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Applying Model Mediation Method to a Mobile Robot Bilateral Teleoperation System Experiencing Time Delays in Communication
 Applying Model Mediation Method to a Mobile Robot Bilateral Teleoperation System Experiencing Time Delays in Communication B. Taner * M. İ. C. Dede E. Uzunoğlu İzmir Institute of Technology İzmir Institute
Applying Model Mediation Method to a Mobile Robot Bilateral Teleoperation System Experiencing Time Delays in Communication B. Taner * M. İ. C. Dede E. Uzunoğlu İzmir Institute of Technology İzmir Institute
Robust Haptic Teleoperation of a Mobile Manipulation Platform
 Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Mobile Manipulation in der Telerobotik
 Mobile Manipulation in der Telerobotik Angelika Peer, Thomas Schauß, Ulrich Unterhinninghofen, Martin Buss angelika.peer@tum.de schauss@tum.de ulrich.unterhinninghofen@tum.de mb@tum.de Lehrstuhl für Steuerungs-
Mobile Manipulation in der Telerobotik Angelika Peer, Thomas Schauß, Ulrich Unterhinninghofen, Martin Buss angelika.peer@tum.de schauss@tum.de ulrich.unterhinninghofen@tum.de mb@tum.de Lehrstuhl für Steuerungs-
Dimensional Reduction of High-Frequency Accelerations for Haptic Rendering
 Dimensional Reduction of High-Frequency Accelerations for Haptic Rendering Nils Landin, Joseph M. Romano, William McMahan, and Katherine J. Kuchenbecker KTH Royal Institute of Technology, Stockholm, Sweden
Dimensional Reduction of High-Frequency Accelerations for Haptic Rendering Nils Landin, Joseph M. Romano, William McMahan, and Katherine J. Kuchenbecker KTH Royal Institute of Technology, Stockholm, Sweden
QoE Assessment of Object Softness in Remote Robot System with Haptics
 QoE Assessment of Object Softness in Remote Robot System with Haptics ~ Comparison of Stabilization Control ~ Qin Qian 1 Yutaka Ishibashi 1 Pingguo Huang 2 Yuichiro Tateiwa 1 Hitoshi Watanabe 3 Kostas
QoE Assessment of Object Softness in Remote Robot System with Haptics ~ Comparison of Stabilization Control ~ Qin Qian 1 Yutaka Ishibashi 1 Pingguo Huang 2 Yuichiro Tateiwa 1 Hitoshi Watanabe 3 Kostas
Packet Loss Effects in Passive Telepresence Systems
 Packet Loss Effects in Passive Telepresence Systems Sandra Hirche and Martin Buss Abstract This paper focuses on the effects of packet loss in passive bilateral telepresence systems with force feedback.
Packet Loss Effects in Passive Telepresence Systems Sandra Hirche and Martin Buss Abstract This paper focuses on the effects of packet loss in passive bilateral telepresence systems with force feedback.
A Haptic Texture Database for Tool-mediated Texture Recognition and Classification
 A Haptic Texture Database for Tool-mediated Texture Recognition and Classification Matti Strese, Jun-Yong Lee, Clemens Schuwerk, Qingfu Han, Hyoung-Gook Kim and Eckehard Steinbach Chair of Media Technology
A Haptic Texture Database for Tool-mediated Texture Recognition and Classification Matti Strese, Jun-Yong Lee, Clemens Schuwerk, Qingfu Han, Hyoung-Gook Kim and Eckehard Steinbach Chair of Media Technology
Fuzzy Logic Based Force-Feedback for Obstacle Collision Avoidance of Robot Manipulators
 Fuzzy Logic Based Force-Feedback for Obstacle Collision Avoidance of Robot Manipulators D. Wijayasekara, M. Manic Department of Computer Science University of Idaho Idaho Falls, USA wija2589@vandals.uidaho.edu,
Fuzzy Logic Based Force-Feedback for Obstacle Collision Avoidance of Robot Manipulators D. Wijayasekara, M. Manic Department of Computer Science University of Idaho Idaho Falls, USA wija2589@vandals.uidaho.edu,
Networked haptic cooperation using remote dynamic proxies
 29 Second International Conferences on Advances in Computer-Human Interactions Networked haptic cooperation using remote dynamic proxies Zhi Li Department of Mechanical Engineering University of Victoria
29 Second International Conferences on Advances in Computer-Human Interactions Networked haptic cooperation using remote dynamic proxies Zhi Li Department of Mechanical Engineering University of Victoria
A Psychophysically Motivated Compression Approach for 3D Haptic Data
 A Psychophysically Motivated Compression Approach for 3D Haptic Data Peter Hinterseer Eckehard Steinbach Institute of Communication Networks Fachgebiet Medientechnik Technische Universität München Munich,
A Psychophysically Motivated Compression Approach for 3D Haptic Data Peter Hinterseer Eckehard Steinbach Institute of Communication Networks Fachgebiet Medientechnik Technische Universität München Munich,
Lecture 8: Tactile devices
 ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 8: Tactile devices Allison M. Okamura Stanford University tactile haptic devices tactile feedback goal is to stimulate the skin in a programmable
ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 8: Tactile devices Allison M. Okamura Stanford University tactile haptic devices tactile feedback goal is to stimulate the skin in a programmable
Lecture 1: Introduction to haptics and Kinesthetic haptic devices
 ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 1: Introduction to haptics and Kinesthetic haptic devices Allison M. Okamura Stanford University today s objectives introduce you to the
ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 1: Introduction to haptics and Kinesthetic haptic devices Allison M. Okamura Stanford University today s objectives introduce you to the
PROPRIOCEPTION AND FORCE FEEDBACK
 PROPRIOCEPTION AND FORCE FEEDBACK Roope Raisamo and Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere,
PROPRIOCEPTION AND FORCE FEEDBACK Roope Raisamo and Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere,
Complementary Tactile Sensor and Human Interface for Robotic Telemanipulation
 Complementary Tactile Sensor and Human Interface for Robotic Telemanipulation Emil M. Petriu, Pierre Payeur, na-maria Cretu, and Codrin Pasca School of Information Technology and Engineering University
Complementary Tactile Sensor and Human Interface for Robotic Telemanipulation Emil M. Petriu, Pierre Payeur, na-maria Cretu, and Codrin Pasca School of Information Technology and Engineering University
Lecture 9: Teleoperation
 ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
FORCE FEEDBACK. Roope Raisamo
 FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
Control design issues for a microinvasive neurosurgery teleoperator system
 Control design issues for a microinvasive neurosurgery teleoperator system Jacopo Semmoloni, Rudy Manganelli, Alessandro Formaglio and Domenico Prattichizzo Abstract This paper deals with controller design
Control design issues for a microinvasive neurosurgery teleoperator system Jacopo Semmoloni, Rudy Manganelli, Alessandro Formaglio and Domenico Prattichizzo Abstract This paper deals with controller design
Performance Issues in Collaborative Haptic Training
 27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 FrA4.4 Performance Issues in Collaborative Haptic Training Behzad Khademian and Keyvan Hashtrudi-Zaad Abstract This
27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 FrA4.4 Performance Issues in Collaborative Haptic Training Behzad Khademian and Keyvan Hashtrudi-Zaad Abstract This
Efficiency of Cooperation between Human and Remote Robot System with Force Feedback
 Efficiency of Cooperation between Human and Remote Robot System with Force Feedback Yuichi Toyoda, Pingguo Huang, Yutaka Ishibashi, Yuichiro Tateiwa, and Hitoshi Watanabe * Nagoya Institute of Technology
Efficiency of Cooperation between Human and Remote Robot System with Force Feedback Yuichi Toyoda, Pingguo Huang, Yutaka Ishibashi, Yuichiro Tateiwa, and Hitoshi Watanabe * Nagoya Institute of Technology
Dimensional Reduction of High-Frequencey Accelerations for Haptic Rendering
 University of Pennsylvania ScholarlyCommons Departmental Papers (MEAM) Department of Mechanical Engineering & Applied Mechanics 7-2010 Dimensional Reduction of High-Frequencey Accelerations for Haptic
University of Pennsylvania ScholarlyCommons Departmental Papers (MEAM) Department of Mechanical Engineering & Applied Mechanics 7-2010 Dimensional Reduction of High-Frequencey Accelerations for Haptic
Real-Time Bilateral Control for an Internet-Based Telerobotic System
 708 Real-Time Bilateral Control for an Internet-Based Telerobotic System Jahng-Hyon PARK, Joonyoung PARK and Seungjae MOON There is a growing tendency to use the Internet as the transmission medium of
708 Real-Time Bilateral Control for an Internet-Based Telerobotic System Jahng-Hyon PARK, Joonyoung PARK and Seungjae MOON There is a growing tendency to use the Internet as the transmission medium of
Expression of 2DOF Fingertip Traction with 1DOF Lateral Skin Stretch
 Expression of 2DOF Fingertip Traction with 1DOF Lateral Skin Stretch Vibol Yem 1, Mai Shibahara 2, Katsunari Sato 2, Hiroyuki Kajimoto 1 1 The University of Electro-Communications, Tokyo, Japan 2 Nara
Expression of 2DOF Fingertip Traction with 1DOF Lateral Skin Stretch Vibol Yem 1, Mai Shibahara 2, Katsunari Sato 2, Hiroyuki Kajimoto 1 1 The University of Electro-Communications, Tokyo, Japan 2 Nara
Tele-operation of a Robot Arm with Electro Tactile Feedback
 F Tele-operation of a Robot Arm with Electro Tactile Feedback Daniel S. Pamungkas and Koren Ward * Abstract Tactile feedback from a remotely controlled robotic arm can facilitate certain tasks by enabling
F Tele-operation of a Robot Arm with Electro Tactile Feedback Daniel S. Pamungkas and Koren Ward * Abstract Tactile feedback from a remotely controlled robotic arm can facilitate certain tasks by enabling
Beyond Visual: Shape, Haptics and Actuation in 3D UI
 Beyond Visual: Shape, Haptics and Actuation in 3D UI Ivan Poupyrev Welcome, Introduction, & Roadmap 3D UIs 101 3D UIs 201 User Studies and 3D UIs Guidelines for Developing 3D UIs Video Games: 3D UIs for
Beyond Visual: Shape, Haptics and Actuation in 3D UI Ivan Poupyrev Welcome, Introduction, & Roadmap 3D UIs 101 3D UIs 201 User Studies and 3D UIs Guidelines for Developing 3D UIs Video Games: 3D UIs for
Modelling of Haptic Vibration Textures with Infinite-Impulse-Response Filters
 Modelling of Haptic Vibration Textures with Infinite-Impulse-Response Filters Vijaya L. Guruswamy, Jochen Lang and Won-Sook Lee School of Information Technology and Engineering University of Ottawa Ottawa,
Modelling of Haptic Vibration Textures with Infinite-Impulse-Response Filters Vijaya L. Guruswamy, Jochen Lang and Won-Sook Lee School of Information Technology and Engineering University of Ottawa Ottawa,
Remote Tactile Transmission with Time Delay for Robotic Master Slave Systems
 Advanced Robotics 25 (2011) 1271 1294 brill.nl/ar Full paper Remote Tactile Transmission with Time Delay for Robotic Master Slave Systems S. Okamoto a,, M. Konyo a, T. Maeno b and S. Tadokoro a a Graduate
Advanced Robotics 25 (2011) 1271 1294 brill.nl/ar Full paper Remote Tactile Transmission with Time Delay for Robotic Master Slave Systems S. Okamoto a,, M. Konyo a, T. Maeno b and S. Tadokoro a a Graduate
Steady-Hand Teleoperation with Virtual Fixtures
 Steady-Hand Teleoperation with Virtual Fixtures Jake J. Abbott 1, Gregory D. Hager 2, and Allison M. Okamura 1 1 Department of Mechanical Engineering 2 Department of Computer Science The Johns Hopkins
Steady-Hand Teleoperation with Virtual Fixtures Jake J. Abbott 1, Gregory D. Hager 2, and Allison M. Okamura 1 1 Department of Mechanical Engineering 2 Department of Computer Science The Johns Hopkins
Improving Telerobotic Touch Via High-Frequency Acceleration Matching
 Improving Telerobotic Touch Via High-Frequency Acceleration Matching Katherine J. Kuchenbecker and Günter Niemeyer Stanford University Telerobotics Lab Stanford California 9435-42 Website: http://telerobotics.stanford.edu
Improving Telerobotic Touch Via High-Frequency Acceleration Matching Katherine J. Kuchenbecker and Günter Niemeyer Stanford University Telerobotics Lab Stanford California 9435-42 Website: http://telerobotics.stanford.edu
Tele-operation of a robot arm with electro tactile feedback
 University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2013 Tele-operation of a robot arm with electro
University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2013 Tele-operation of a robot arm with electro
Bibliography. Conclusion
 the almost identical time measured in the real and the virtual execution, and the fact that the real execution with indirect vision to be slower than the manipulation on the simulated environment. The
the almost identical time measured in the real and the virtual execution, and the fact that the real execution with indirect vision to be slower than the manipulation on the simulated environment. The
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery
 Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
A Digital Input Shaper for Stable and Transparent Haptic Interaction
 21 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 21, Anchorage, Alaska, USA A Digital Input Shaper for Stable and Transparent Haptic Interaction Yo-An
21 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 21, Anchorage, Alaska, USA A Digital Input Shaper for Stable and Transparent Haptic Interaction Yo-An
Development of a telepresence agent
 Author: Chung-Chen Tsai, Yeh-Liang Hsu (2001-04-06); recommended: Yeh-Liang Hsu (2001-04-06); last updated: Yeh-Liang Hsu (2004-03-23). Note: This paper was first presented at. The revised paper was presented
Author: Chung-Chen Tsai, Yeh-Liang Hsu (2001-04-06); recommended: Yeh-Liang Hsu (2001-04-06); last updated: Yeh-Liang Hsu (2004-03-23). Note: This paper was first presented at. The revised paper was presented
Feeding human senses through Immersion
 Virtual Reality Feeding human senses through Immersion 1. How many human senses? 2. Overview of key human senses 3. Sensory stimulation through Immersion 4. Conclusion Th3.1 1. How many human senses? [TRV
Virtual Reality Feeding human senses through Immersion 1. How many human senses? 2. Overview of key human senses 3. Sensory stimulation through Immersion 4. Conclusion Th3.1 1. How many human senses? [TRV
Evaluation of Five-finger Haptic Communication with Network Delay
 Tactile Communication Haptic Communication Network Delay Evaluation of Five-finger Haptic Communication with Network Delay To realize tactile communication, we clarify some issues regarding how delay affects
Tactile Communication Haptic Communication Network Delay Evaluation of Five-finger Haptic Communication with Network Delay To realize tactile communication, we clarify some issues regarding how delay affects
Haptic Virtual Fixtures for Robot-Assisted Manipulation
 Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Vibration Feedback Models for Virtual Environments
 Presented at the 1998 IEEE International Conference on Robotics and Automation May 16-2, 1998, Leuven, Belgium Vibration Feedback Models for Virtual Environments Allison M. Okamura, 1,2 Jack T. Dennerlein
Presented at the 1998 IEEE International Conference on Robotics and Automation May 16-2, 1998, Leuven, Belgium Vibration Feedback Models for Virtual Environments Allison M. Okamura, 1,2 Jack T. Dennerlein
IEEE/ASME TRANSACTIONS ON MECHATRONICS 1. Vinay Chawda, Student Member, IEEE and Marcia K. O Malley, Senior Member, IEEE
 IEEE/ASME TRANSACTIONS ON MECHATRONICS 1 Position Synchronization in Bilateral Teleoperation Under Time-Varying Communication Delays Vinay Chawda, Student Member, IEEE and Marcia K. O Malley, Senior Member,
IEEE/ASME TRANSACTIONS ON MECHATRONICS 1 Position Synchronization in Bilateral Teleoperation Under Time-Varying Communication Delays Vinay Chawda, Student Member, IEEE and Marcia K. O Malley, Senior Member,
¾ B-TECH (IT) ¾ B-TECH (IT)
 ¾ B-TECH (IT)") HAPTIC TECHNOLOGY V.R.Siddhartha Engineering College Vijayawada. Presented by Sudheer Kumar.S CH.Sreekanth ¾ B-TECH (IT) ¾ B-TECH (IT) Email:samudralasudheer@yahoo.com Email:shri_136@yahoo.co.in Introduction
HAPTIC TECHNOLOGY V.R.Siddhartha Engineering College Vijayawada. Presented by Sudheer Kumar.S CH.Sreekanth ¾ B-TECH (IT) ¾ B-TECH (IT) Email:samudralasudheer@yahoo.com Email:shri_136@yahoo.co.in Introduction
Haptic Data Transmission based on the Prediction and Compression
 Haptic Data Transmission based on the Prediction and Compression 375 19 X Haptic Data Transmission based on the Prediction and Compression Yonghee You and Mee Young Sung Department of Computer Science
Haptic Data Transmission based on the Prediction and Compression 375 19 X Haptic Data Transmission based on the Prediction and Compression Yonghee You and Mee Young Sung Department of Computer Science
A Multiplexing Scheme for Multimodal Teleoperation
 A Multiplexing Scheme for Multimodal Teleoperation BURAK CIZMECI, XIAO XU, RAHUL CHAUDHARI, CHRISTOPH BACHHUBER, NICOLAS ALT and ECKEHARD STEINBACH, Chair of Media Technology Technical University of Munich
A Multiplexing Scheme for Multimodal Teleoperation BURAK CIZMECI, XIAO XU, RAHUL CHAUDHARI, CHRISTOPH BACHHUBER, NICOLAS ALT and ECKEHARD STEINBACH, Chair of Media Technology Technical University of Munich
Increasing the Impedance Range of a Haptic Display by Adding Electrical Damping
 Increasing the Impedance Range of a Haptic Display by Adding Electrical Damping Joshua S. Mehling * J. Edward Colgate Michael A. Peshkin (*)NASA Johnson Space Center, USA ( )Department of Mechanical Engineering,
Increasing the Impedance Range of a Haptic Display by Adding Electrical Damping Joshua S. Mehling * J. Edward Colgate Michael A. Peshkin (*)NASA Johnson Space Center, USA ( )Department of Mechanical Engineering,
Modeling and Experimental Studies of a Novel 6DOF Haptic Device
 Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Telecommunication and remote-controlled
 Spatial Interfaces Editors: Frank Steinicke and Wolfgang Stuerzlinger Telexistence: Enabling Humans to Be Virtually Ubiquitous Susumu Tachi The University of Tokyo Telecommunication and remote-controlled
Spatial Interfaces Editors: Frank Steinicke and Wolfgang Stuerzlinger Telexistence: Enabling Humans to Be Virtually Ubiquitous Susumu Tachi The University of Tokyo Telecommunication and remote-controlled
IEEE JOURNAL OF SELECTED TOPICS IN SIGNAL PROCESSING, VOL. XX, NO. X, DECEMBER XXXX 1
 The final version of record is available at http://dx.doi.org/1.119/jstsp.214.2374574 IEEE JOURNAL OF SELECTED TOPICS IN SIGNAL PROCESSING, VOL. XX, NO. X, DECEMBER XXXX 1 Perceptual and Bitrate-scalable
The final version of record is available at http://dx.doi.org/1.119/jstsp.214.2374574 IEEE JOURNAL OF SELECTED TOPICS IN SIGNAL PROCESSING, VOL. XX, NO. X, DECEMBER XXXX 1 Perceptual and Bitrate-scalable
Force Feedback in Virtual Assembly Scenarios: A Human Factors Evaluation
 Force Feedback in Virtual Assembly Scenarios: A Human Factors Evaluation Bernhard Weber German Aerospace Center Institute of Robotics and Mechatronics DLR.de Chart 2 Content Motivation Virtual Environment
Force Feedback in Virtual Assembly Scenarios: A Human Factors Evaluation Bernhard Weber German Aerospace Center Institute of Robotics and Mechatronics DLR.de Chart 2 Content Motivation Virtual Environment
Some Issues on Integrating Telepresence Technology into Industrial Robotic Assembly
 Some Issues on Integrating Telepresence Technology into Industrial Robotic Assembly Gunther Reinhart and Marwan Radi Abstract Since the 1940s, many promising telepresence research results have been obtained.
Some Issues on Integrating Telepresence Technology into Industrial Robotic Assembly Gunther Reinhart and Marwan Radi Abstract Since the 1940s, many promising telepresence research results have been obtained.
Toward Principles for Visual Interaction Design for Communicating Weight by using Pseudo-Haptic Feedback
 Toward Principles for Visual Interaction Design for Communicating Weight by using Pseudo-Haptic Feedback Kumiyo Nakakoji Key Technology Laboratory SRA Inc. 2-32-8 Minami-Ikebukuro, Toshima, Tokyo, 171-8513,
Toward Principles for Visual Interaction Design for Communicating Weight by using Pseudo-Haptic Feedback Kumiyo Nakakoji Key Technology Laboratory SRA Inc. 2-32-8 Minami-Ikebukuro, Toshima, Tokyo, 171-8513,
Collaboration in Multimodal Virtual Environments
 Collaboration in Multimodal Virtual Environments Eva-Lotta Sallnäs NADA, Royal Institute of Technology evalotta@nada.kth.se http://www.nada.kth.se/~evalotta/ Research question How is collaboration in a
Collaboration in Multimodal Virtual Environments Eva-Lotta Sallnäs NADA, Royal Institute of Technology evalotta@nada.kth.se http://www.nada.kth.se/~evalotta/ Research question How is collaboration in a
Gripper Telemanipulation System for the PR2 Robot. Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J.
, University of the District of Columbia Advisor: Dr. Camillo J.") Gripper Telemanipulation System for the PR2 Robot Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J. Taylor Abstract The most common method of teleoperation has an
Gripper Telemanipulation System for the PR2 Robot Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J. Taylor Abstract The most common method of teleoperation has an
Time-Domain Passivity Control of Haptic Interfaces
 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL 18, NO 1, FEBRUARY 2002 1 Time-Domain Passivity Control of Haptic Interfaces Blake Hannaford, Senior Member, IEEE, and Jee-Hwan Ryu Abstract A patent-pending,
IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL 18, NO 1, FEBRUARY 2002 1 Time-Domain Passivity Control of Haptic Interfaces Blake Hannaford, Senior Member, IEEE, and Jee-Hwan Ryu Abstract A patent-pending,
CS277 - Experimental Haptics Lecture 2. Haptic Rendering
 CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
Computer Haptics and Applications
 Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Output Devices - Non-Visual
 IMGD 5100: Immersive HCI Output Devices - Non-Visual Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Overview Here we are concerned with
IMGD 5100: Immersive HCI Output Devices - Non-Visual Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Overview Here we are concerned with
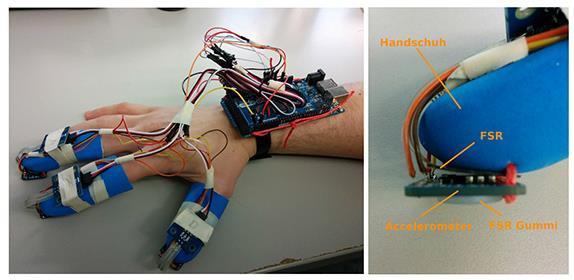
Texture recognition using force sensitive resistors
 Texture recognition using force sensitive resistors SAYED, Muhammad, DIAZ GARCIA,, Jose Carlos and ALBOUL, Lyuba Available from Sheffield Hallam University Research
Texture recognition using force sensitive resistors SAYED, Muhammad, DIAZ GARCIA,, Jose Carlos and ALBOUL, Lyuba Available from Sheffield Hallam University Research
Abdulmotaleb El Saddik Associate Professor Dr.-Ing., SMIEEE, P.Eng.
 Abdulmotaleb El Saddik Associate Professor Dr.-Ing., SMIEEE, P.Eng. Multimedia Communications Research Laboratory University of Ottawa Ontario Research Network of E-Commerce www.mcrlab.uottawa.ca abed@mcrlab.uottawa.ca
Abdulmotaleb El Saddik Associate Professor Dr.-Ing., SMIEEE, P.Eng. Multimedia Communications Research Laboratory University of Ottawa Ontario Research Network of E-Commerce www.mcrlab.uottawa.ca abed@mcrlab.uottawa.ca
EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON
 EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON Josep Amat 1, Alícia Casals 2, Manel Frigola 2, Enric Martín 2 1Robotics Institute. (IRI) UPC / CSIC Llorens Artigas 4-6, 2a
EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON Josep Amat 1, Alícia Casals 2, Manel Frigola 2, Enric Martín 2 1Robotics Institute. (IRI) UPC / CSIC Llorens Artigas 4-6, 2a
VR based HCI Techniques & Application. November 29, 2002
 VR based HCI Techniques & Application November 29, 2002 stefan.seipel@hci.uu.se What is Virtual Reality? Coates (1992): Virtual Reality is electronic simulations of environments experienced via head mounted
VR based HCI Techniques & Application November 29, 2002 stefan.seipel@hci.uu.se What is Virtual Reality? Coates (1992): Virtual Reality is electronic simulations of environments experienced via head mounted
Study of 2D Vibration Summing for Improved Intensity Control in Vibrotactile Array Rendering
 Study of 2D Vibration Summing for Improved Intensity Control in Vibrotactile Array Rendering Nicholas G. Lipari and Christoph W. Borst University of Louisiana at Lafayette Abstract. 2D tactile arrays may
Study of 2D Vibration Summing for Improved Intensity Control in Vibrotactile Array Rendering Nicholas G. Lipari and Christoph W. Borst University of Louisiana at Lafayette Abstract. 2D tactile arrays may
Newsletter of the IEEE TCH. Issue 3
 Newsletter of the IEEE TCH Issue 3 IEEE TCH Executive Committee May 01, 2016 1 Editorial Dear IEEE Technical Committee on Haptics (TCH) members: It is our pleasure to announce the 3 rd issue of the Newsletter
Newsletter of the IEEE TCH Issue 3 IEEE TCH Executive Committee May 01, 2016 1 Editorial Dear IEEE Technical Committee on Haptics (TCH) members: It is our pleasure to announce the 3 rd issue of the Newsletter
Cutaneous haptic feedback to ensure the stability of robotic teleoperation systems
 1 Cutaneous haptic feedback to ensure the stability of robotic teleoperation systems C. Pacchierotti, L. Meli, F. Chinello, M. Malvezzi, and D. Prattichizzo Abstract Cutaneous haptic feedback can be used
1 Cutaneous haptic feedback to ensure the stability of robotic teleoperation systems C. Pacchierotti, L. Meli, F. Chinello, M. Malvezzi, and D. Prattichizzo Abstract Cutaneous haptic feedback can be used
Shape Memory Alloy Actuator Controller Design for Tactile Displays
 34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
The Effect of Haptic Feedback on Basic Social Interaction within Shared Virtual Environments
 The Effect of Haptic Feedback on Basic Social Interaction within Shared Virtual Environments Elias Giannopoulos 1, Victor Eslava 2, María Oyarzabal 2, Teresa Hierro 2, Laura González 2, Manuel Ferre 2,
The Effect of Haptic Feedback on Basic Social Interaction within Shared Virtual Environments Elias Giannopoulos 1, Victor Eslava 2, María Oyarzabal 2, Teresa Hierro 2, Laura González 2, Manuel Ferre 2,
Introduction to Haptics
 Introduction to Haptics Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction (TAUCHI) Department of Computer Sciences University of Tampere, Finland Definition
Introduction to Haptics Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction (TAUCHI) Department of Computer Sciences University of Tampere, Finland Definition
Peter Berkelman. ACHI/DigitalWorld
 Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Reality-Based Models for Vibration Feedback in Virtual Environments
 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 6, NO. 3, SEPTEMBER 2001 245 Reality-Based Models for Vibration Feedback in Virtual Environments Allison M. Okamura, Associate Member, IEEE, Mark R. Cutkosky,
IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 6, NO. 3, SEPTEMBER 2001 245 Reality-Based Models for Vibration Feedback in Virtual Environments Allison M. Okamura, Associate Member, IEEE, Mark R. Cutkosky,
HAPTIC INTERFACE CONTROL DESIGN FOR PERFORMANCE AND STABILITY ROBUSTNESS. Taweedej Sirithanapipat. Dissertation. Submitted to the Faculty of the
 HAPTIC INTERFACE CONTROL DESIGN FOR PERFORMANCE AND STABILITY ROBUSTNESS By Taweedej Sirithanapipat Dissertation Submitted to the Faculty of the Graduate School of Vanderbilt University in partial fulfillment
HAPTIC INTERFACE CONTROL DESIGN FOR PERFORMANCE AND STABILITY ROBUSTNESS By Taweedej Sirithanapipat Dissertation Submitted to the Faculty of the Graduate School of Vanderbilt University in partial fulfillment
Interactive Simulation: UCF EIN5255. VR Software. Audio Output. Page 4-1
 VR Software Class 4 Dr. Nabil Rami http://www.simulationfirst.com/ein5255/ Audio Output Can be divided into two elements: Audio Generation Audio Presentation Page 4-1 Audio Generation A variety of audio
VR Software Class 4 Dr. Nabil Rami http://www.simulationfirst.com/ein5255/ Audio Output Can be divided into two elements: Audio Generation Audio Presentation Page 4-1 Audio Generation A variety of audio
Discrimination of Virtual Haptic Textures Rendered with Different Update Rates
 Discrimination of Virtual Haptic Textures Rendered with Different Update Rates Seungmoon Choi and Hong Z. Tan Haptic Interface Research Laboratory Purdue University 465 Northwestern Avenue West Lafayette,
Discrimination of Virtual Haptic Textures Rendered with Different Update Rates Seungmoon Choi and Hong Z. Tan Haptic Interface Research Laboratory Purdue University 465 Northwestern Avenue West Lafayette,
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
DETC AN ADMITTANCE GLOVE MECHANISM FOR CONTROLLING A MOBILE ROBOT
 Proceedings of the ASME 212 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 212 August 12-15, 212, Chicago, IL, USA DETC212-71284
Proceedings of the ASME 212 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 212 August 12-15, 212, Chicago, IL, USA DETC212-71284
Immersive Natives. Die Zukunft der virtuellen Realität. Prof. Dr. Frank Steinicke. Human-Computer Interaction, Universität Hamburg
 Immersive Natives Die Zukunft der virtuellen Realität Prof. Dr. Frank Steinicke Human-Computer Interaction, Universität Hamburg Immersion Presence Place Illusion + Plausibility Illusion + Social Presence
Immersive Natives Die Zukunft der virtuellen Realität Prof. Dr. Frank Steinicke Human-Computer Interaction, Universität Hamburg Immersion Presence Place Illusion + Plausibility Illusion + Social Presence
A Study of Perceptual Performance in Haptic Virtual Environments
 Paper: Rb18-4-2617; 2006/5/22 A Study of Perceptual Performance in Haptic Virtual Marcia K. O Malley, and Gina Upperman Mechanical Engineering and Materials Science, Rice University 6100 Main Street, MEMS
Paper: Rb18-4-2617; 2006/5/22 A Study of Perceptual Performance in Haptic Virtual Marcia K. O Malley, and Gina Upperman Mechanical Engineering and Materials Science, Rice University 6100 Main Street, MEMS