Teaching Embedded Systems to Berkeley Undergraduates
|
|
|
- Curtis Myron Lawrence
- 5 years ago
- Views:
Transcription


1 Teaching Embedded Systems to Berkeley Undergraduates EECS124 at UC Berkeley co-developed by Edward A. Lee Sanjit A. Seshia Claire J. Tomlin CPSWeek CHESS Workshop April 21, 2008
2 From Research to Education at Berkeley Research projects and centers E.g. CHESS, GSRC, PATH Graduate courses: Core and Advanced EECS 249: Embedded System Design: Modeling, Validation and Synthesis EECS 291E: Hybrid Systems EECS 290N: Concurrent Models of Computation for Embedded Systems Undergraduate courses: lower and upper division EECS 20: Structure and Interpretation of Signals and Systems, EECS 124: Introduction to Embedded Systems Lee, Seshia, Tomlin, UC Berkeley 2
3 New Course (Spring 2008) Introduction to Embedded Systems This course is intended to introduce students to the design and analysis of computational systems that interact with physical processes. Applications of such systems include medical devices and systems, consumer electronics, toys and games, assisted living, traffic control and safety, automotive systems, process control, energy management and conservation, environmental control, aircraft control systems, communications systems, instrumentation, critical infrastructure control (electric power, water resources, and communications systems for example), robotics and distributed robotics (telepresence, telemedicine), defense systems, manufacturing, and smart structures. A major theme of this course will be on the interplay of practical design with formal models of systems, including both software components and physical dynamics. A major emphasis will be on building high confidence systems with real-time and concurrent behaviors. Cyber-Physical Systems Model-Based Design Sensors and Actuators Interfacing to Sensors and Actuators Actors, Dataflow Modeling Modal Behavior Concurrency: Threads and Interrupts Hybrid Systems Simulation Specification; Temporal Logic Reachability Analysis Controller Synthesis Control Design for FSMs and ODEs Real-Time Operating Systems (RTOS) Scheduling: Rate-Monotonic and EDF Concurrency Models Execution Time Analysis Localization and Mapping Real-Time Networking Sensor Networks, Security, Lee, Seshia, Tomlin, UC Berkeley 3
4 New Course (Spring 2008) Introduction to Embedded Systems This course is intended to introduce students to the design and analysis of computational systems that interact with physical processes. Applications of such systems include medical devices and systems, consumer electronics, toys and games, assisted living, traffic control and safety, automotive systems, process control, energy management and conservation, environmental control, aircraft control systems, communications systems, instrumentation, critical infrastructure control (electric power, water resources, and communications systems for example), robotics and distributed robotics (telepresence, telemedicine), defense systems, manufacturing, and smart structures. A major theme of this course will be on the interplay of practical design with formal models of systems, including both software components and physical dynamics. A major emphasis will be on building high confidence systems with real-time and concurrent behaviors. Cyber-Physical Systems Model-Based Design Sensors and Actuators Interfacing to Sensors and Actuators Actors, Dataflow Modeling Modal Behavior Concurrency: Threads and Interrupts Hybrid Systems Simulation Specification; Temporal Logic Reachability Analysis Controller Synthesis Control Design for FSMs and ODEs Real-Time Operating Systems (RTOS) Scheduling: Rate-Monotonic and EDF Concurrency Models Execution Time Analysis Localization and Mapping Real-Time Networking Sensor Networks, Security, Lee, Seshia, Tomlin, UC Berkeley 4
5 Outline Course Organization & Enrollment Course project forms main component Lab Exercise Video of lab demo at Cal Day Sampling of Topics Physical dynamics Modal modeling; verification and control Lee, Seshia, Tomlin, UC Berkeley 5
6 Course Organization and Enrollment 20 students enrolled currently ~50% seniors, rest mostly juniors 75% taken upper-division signals & systems, 50% taken digital systems design Course components: Project 35% 4 Homeworks 20% Midterm 25% Labs 20% Lee, Seshia, Tomlin, UC Berkeley 6
 with a pluggable")

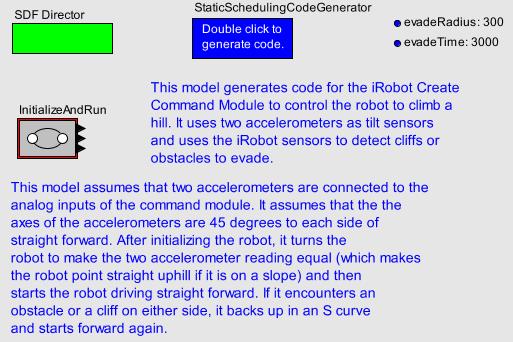
7 Lab Exercise Train a robot to climb a hill. We use the irobot Create (the platform for the Roomba vacuum cleaner) with a pluggable Command Module containing an 8-bit Atmel microcontroller. Students have to extend it with sensors, construct models of its behavior, design a control system, and implement the control system in C. Lee, Seshia, Tomlin, UC Berkeley 7

8 Demo Lee, Seshia, Tomlin, UC Berkeley 8
9 Modeling Physical Dynamics: Feedback Control Problem A helicopter without a tail rotor, like the one below, will spin uncontrollably due to the torque induced by friction in the rotor shaft. Control system problem: Apply torque using the tail rotor to counterbalance the torque of the top rotor. Lee, Seshia, Tomlin, UC Berkeley 9
10 Actor Model of Systems A system is a function that accepts an input signal and yields an output signal. The domain and range of the system function are sets of signals, which themselves are functions. Parameters may affect the definition of the function S. Lee, Seshia, Tomlin, UC Berkeley 10

11 Proportional controller desired angular velocity error signal net torque Lee, Seshia, Tomlin, UC Berkeley 11
12 Model-Based Design Solution Lee, Seshia, Tomlin, UC Berkeley 12
13 Modal Modeling: FSMs & Hybrid Systems, Analysis, Control start φ Synthesize strategy for a robot to get from start location to φ with stationary/moving obstacles Modeling with FSMs: Discretize the room into a grid, finite set of moves for robot/environment, extensions to HS Specifying the goal: Using temporal logic, F φ Reachability Analysis: Finding path to φ against stationary obstacles Controller Synthesis: Finding (continuous) path to φ against moving obstacles, link to game-playing Lee, Seshia, Tomlin, UC Berkeley 13
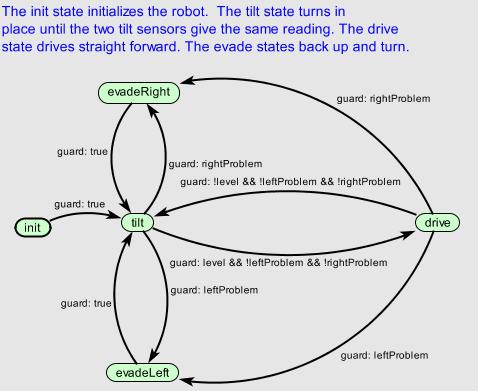
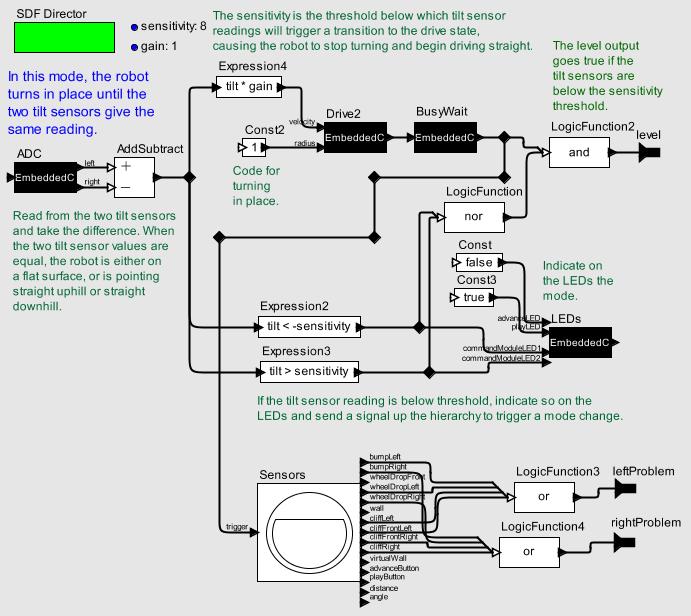
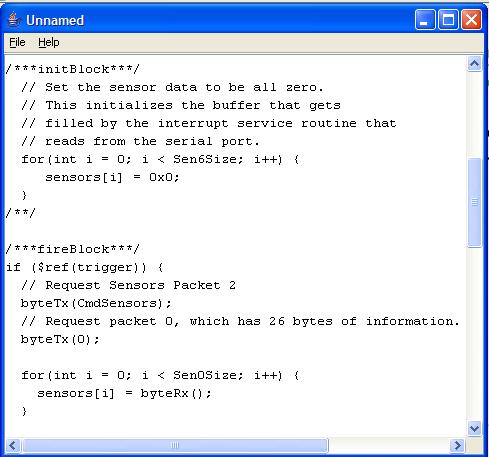
14 Modal Modeling by Students for Lab Lee, Seshia, Tomlin, UC Berkeley 14
15 Some Student Feedback on the Lab Exercises and Link to Class Material Modeling a-priori as State Machines was useful We [ ] learned how implementing states made our code simpler and our strategies easier to program. Debugging was difficult due to limited observability It was [ ] difficult to debug [ ] since we were flying in the dark when it came to matching up unwanted behavior to the corresponding code. Students came up with innovative ways of debugging SOUND: make the robot play different tunes to signal various events BLUETOOTH: interface a bluetooth card to the irobot and view events transmitted to a laptop Sensor calibration was also challenging Lee, Seshia, Tomlin, UC Berkeley 15
16 Other Topics Covered in Class Simulation of Discrete-Event and Continuous Systems Concurrency: threads and interrupts Real-time operating systems Scheduling algorithms & anomalies Concurrent models of computation Execution time analysis Lee, Seshia, Tomlin, UC Berkeley 16
17 Concluding Remarks Positive feedback (there s interest in the course for next year!) Ongoing course projects Localization & mapping with cooperating irobots Finger-mounted infra-red glove that replaces mouse (to play pong ) SegBot : Segway built with Lego Mindstorms Challenge: Need to better mesh the theoretical topics with the labs Lee, Seshia, Tomlin, UC Berkeley 17
18 Acknowledgments TA: Isaac Liu Labs: Ferenc Kovac, Winthrop Williams LabView Help & Suggestions: Dr. Hugo Andrade (NI) Guest Lecturers: Prof. Kris Pister, Dr. Jeff Bier (BDTI), Gabe Hoffman (Stanford) Infrastructure & Projects: Christopher Brooks The many Berkeley EECS faculty who gave their inputs and advice in the critical stages of devising this course Lee, Seshia, Tomlin, UC Berkeley 18
Center for Hybrid and Embedded Software Systems (CHESS)
") . Center for Hybrid and Embedded Software Systems (CHESS) College of Engineering University of California, Berkeley Board of Directors Tom Henzinger, tah@eecs.berkeley.edu Edward A. Lee, eal@eecs.berkeley.edu
. Center for Hybrid and Embedded Software Systems (CHESS) College of Engineering University of California, Berkeley Board of Directors Tom Henzinger, tah@eecs.berkeley.edu Edward A. Lee, eal@eecs.berkeley.edu
Center for Hybrid and Embedded Software Systems. Hybrid & Embedded Software Systems
 Center for Hybrid and Embedded Software Systems College of Engineering, University of California at Berkeley Presented by: Edward A. Lee, EECS, UC Berkeley Citris Founding Corporate Members Meeting, Feb.
Center for Hybrid and Embedded Software Systems College of Engineering, University of California at Berkeley Presented by: Edward A. Lee, EECS, UC Berkeley Citris Founding Corporate Members Meeting, Feb.
Smart-M3-Based Robot Interaction in Cyber-Physical Systems
 FRUCT 16, Oulu, Finland October 30, 2014 Smart-M3-Based Robot Interaction in Cyber-Physical Systems Nikolay Teslya *, Sergey Savosin * * St. Petersburg Institute for Informatics and Automation of the Russian
FRUCT 16, Oulu, Finland October 30, 2014 Smart-M3-Based Robot Interaction in Cyber-Physical Systems Nikolay Teslya *, Sergey Savosin * * St. Petersburg Institute for Informatics and Automation of the Russian
ECE 511: MICROPROCESSORS
 ECE 511: MICROPROCESSORS A project report on SNIFFING DOG Under the guidance of Prof. Jens Peter Kaps By, Preethi Santhanam (G00767634) Ranjit Mandavalli (G00819673) Shaswath Raghavan (G00776950) Swathi
ECE 511: MICROPROCESSORS A project report on SNIFFING DOG Under the guidance of Prof. Jens Peter Kaps By, Preethi Santhanam (G00767634) Ranjit Mandavalli (G00819673) Shaswath Raghavan (G00776950) Swathi
WiFinder, a Wifi Signal Intensity Mapping Robot
 1 WiFinder, a Wifi Signal Intensity Mapping Robot Chaitanya Aluru, Sean Roberts, and Eric Wu I. INTRODUCTION The goal of the WiFinder project is to develop a robot that will find the strongest 80.11 signal
1 WiFinder, a Wifi Signal Intensity Mapping Robot Chaitanya Aluru, Sean Roberts, and Eric Wu I. INTRODUCTION The goal of the WiFinder project is to develop a robot that will find the strongest 80.11 signal
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
EECS 219C: Computer-Aided Verification Introduction & Overview. Sanjit A. Seshia EECS, UC Berkeley
 EECS 219C: Computer-Aided Verification Introduction & Overview Sanjit A. Seshia EECS, UC Berkeley Computer-Aided Verification (informally) Does the system do what it is supposed to do? S. A. Seshia 2 The
EECS 219C: Computer-Aided Verification Introduction & Overview Sanjit A. Seshia EECS, UC Berkeley Computer-Aided Verification (informally) Does the system do what it is supposed to do? S. A. Seshia 2 The
BS in. Electrical Engineering
 BS in Electrical Engineering Program Objectives Habib University s Electrical Engineering program is designed to impart rigorous technical knowledge, combined with hands-on experiential learning and a
BS in Electrical Engineering Program Objectives Habib University s Electrical Engineering program is designed to impart rigorous technical knowledge, combined with hands-on experiential learning and a
Introduction to Embedded Systems
 Introduction to Embedded Systems Edward A. Lee & Sanjit Seshia UC Berkeley EECS 124 Spring 2008 Copyright 2008, Edward A. Lee & Sanjit Seshia, All rights reserved Lecture 3: Sensors and Actuators Sensors
Introduction to Embedded Systems Edward A. Lee & Sanjit Seshia UC Berkeley EECS 124 Spring 2008 Copyright 2008, Edward A. Lee & Sanjit Seshia, All rights reserved Lecture 3: Sensors and Actuators Sensors
ExCAPE. Rajeev Alur, Ras Bodik, Jeff Foster, Bjorn Hartmann, Lydia Kavraki,
 ExCAPE Expeditions in Computer Augmented Program Engineering Rajeev Alur, Ras Bodik, Jeff Foster, Bjorn Hartmann, Lydia Kavraki, Hadas Kress-Gazit, Stephane Lafortune, Boon Loo, P. Madhusudan, d Milo Martin,
ExCAPE Expeditions in Computer Augmented Program Engineering Rajeev Alur, Ras Bodik, Jeff Foster, Bjorn Hartmann, Lydia Kavraki, Hadas Kress-Gazit, Stephane Lafortune, Boon Loo, P. Madhusudan, d Milo Martin,
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Introduction to Real-Time Systems
 Introduction to Real-Time Systems Real-Time Systems, Lecture 1 Martina Maggio and Karl-Erik Årzén 16 January 2018 Lund University, Department of Automatic Control Content [Real-Time Control System: Chapter
Introduction to Real-Time Systems Real-Time Systems, Lecture 1 Martina Maggio and Karl-Erik Årzén 16 January 2018 Lund University, Department of Automatic Control Content [Real-Time Control System: Chapter
GE 320: Introduction to Control Systems
 GE 320: Introduction to Control Systems Laboratory Section Manual 1 Welcome to GE 320.. 1 www.softbankrobotics.com 1 1 Introduction This section summarizes the course content and outlines the general procedure
GE 320: Introduction to Control Systems Laboratory Section Manual 1 Welcome to GE 320.. 1 www.softbankrobotics.com 1 1 Introduction This section summarizes the course content and outlines the general procedure
Ontology-Based Robots Self-Organization in Cyber-Physical Systems
 AMICT 2015, Petrozavodsk, Russia 13.05.2015 Ontology-Based Robots Self-Organization in Cyber-Physical Systems Alexey Kashevnik, e-mail: alexey@iias.spb.su PhD, Senior Researcher Laboratory of Computer
AMICT 2015, Petrozavodsk, Russia 13.05.2015 Ontology-Based Robots Self-Organization in Cyber-Physical Systems Alexey Kashevnik, e-mail: alexey@iias.spb.su PhD, Senior Researcher Laboratory of Computer
CSC C85 Embedded Systems Project # 1 Robot Localization
 1 The goal of this project is to apply the ideas we have discussed in lecture to a real-world robot localization task. You will be working with Lego NXT robots, and you will have to find ways to work around
1 The goal of this project is to apply the ideas we have discussed in lecture to a real-world robot localization task. You will be working with Lego NXT robots, and you will have to find ways to work around
Cyber-Physical Systems, Power Grid, and Engineering Education NSF Perspective
 Cyber-Physical Systems, Power Grid, and Engineering Education NSF Perspective Pramod Khargonekar Assistant Director for Engineering National Science Foundation Workshop on Cyber-Physical Systems Education
Cyber-Physical Systems, Power Grid, and Engineering Education NSF Perspective Pramod Khargonekar Assistant Director for Engineering National Science Foundation Workshop on Cyber-Physical Systems Education
GE423 Laboratory Assignment 6 Robot Sensors and Wall-Following
 GE423 Laboratory Assignment 6 Robot Sensors and Wall-Following Goals for this Lab Assignment: 1. Learn about the sensors available on the robot for environment sensing. 2. Learn about classical wall-following
GE423 Laboratory Assignment 6 Robot Sensors and Wall-Following Goals for this Lab Assignment: 1. Learn about the sensors available on the robot for environment sensing. 2. Learn about classical wall-following
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Demand Response: Passive Proximity Electric Sensing EECS Department and the Berkeley Sensor & Actuator Center (BSAC)
") Demand Response: Passive Proximity Electric Sensing EECS Department and the Berkeley Sensor & Actuator Center (BSAC) Technology to enable California households to modify their energy use during periods
Demand Response: Passive Proximity Electric Sensing EECS Department and the Berkeley Sensor & Actuator Center (BSAC) Technology to enable California households to modify their energy use during periods
Overview of the NSF Programs
 Overview of the NSF Programs NSF Workshop on Real Time Data Analytics for the Resilient Electric Grid August 4 5, 2018 Portland, OR EPCN Program Directors Anil Pahwa Any opinion, finding, conclusion, or
Overview of the NSF Programs NSF Workshop on Real Time Data Analytics for the Resilient Electric Grid August 4 5, 2018 Portland, OR EPCN Program Directors Anil Pahwa Any opinion, finding, conclusion, or
Administrative Notes. DC Motors; Torque and Gearing; Encoders; Motor Control. Today. Early DC Motors. Friday 1pm: Communications lecture
 At Actuation: ti DC Motors; Torque and Gearing; Encoders; Motor Control RSS Lecture 3 Wednesday, 11 Feb 2009 Prof. Seth Teller Administrative Notes Friday 1pm: Communications lecture Discuss: writing up
At Actuation: ti DC Motors; Torque and Gearing; Encoders; Motor Control RSS Lecture 3 Wednesday, 11 Feb 2009 Prof. Seth Teller Administrative Notes Friday 1pm: Communications lecture Discuss: writing up
ME 487 Mechatronics. Office: JH 515, Tel.: (505)
") ME 487 Mechatronics Instructor: Assistant: Dr. Ou Ma Office: JH 515, Email: oma@nmsu.edu Tel.: (505)646-6534 Xiumin Diao (Ph.D. student) Office: JH 608, Email: xiumin@nmsu.edu Tel.: (505)646-6544 Dept.
ME 487 Mechatronics Instructor: Assistant: Dr. Ou Ma Office: JH 515, Email: oma@nmsu.edu Tel.: (505)646-6534 Xiumin Diao (Ph.D. student) Office: JH 608, Email: xiumin@nmsu.edu Tel.: (505)646-6544 Dept.
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
Embedded Robust Control of Self-balancing Two-wheeled Robot
 Embedded Robust Control of Self-balancing Two-wheeled Robot L. Mollov, P. Petkov Key Words: Robust control; embedded systems; two-wheeled robots; -synthesis; MATLAB. Abstract. This paper presents the design
Embedded Robust Control of Self-balancing Two-wheeled Robot L. Mollov, P. Petkov Key Words: Robust control; embedded systems; two-wheeled robots; -synthesis; MATLAB. Abstract. This paper presents the design
SELF-BALANCING MOBILE ROBOT TILTER
 Tomislav Tomašić Andrea Demetlika Prof. dr. sc. Mladen Crneković ISSN xxx-xxxx SELF-BALANCING MOBILE ROBOT TILTER Summary UDC 007.52, 62-523.8 In this project a remote controlled self-balancing mobile
Tomislav Tomašić Andrea Demetlika Prof. dr. sc. Mladen Crneković ISSN xxx-xxxx SELF-BALANCING MOBILE ROBOT TILTER Summary UDC 007.52, 62-523.8 In this project a remote controlled self-balancing mobile
Building a comprehensive lab sequence for an undergraduate mechatronics program
 Building a comprehensive lab sequence for an undergraduate mechatronics program Tom Lee Ph.D., Chief Education Officer, Quanser MECHATRONICS Motivation The global engineering academic community is witnessing
Building a comprehensive lab sequence for an undergraduate mechatronics program Tom Lee Ph.D., Chief Education Officer, Quanser MECHATRONICS Motivation The global engineering academic community is witnessing
Executive Summary. Chapter 1. Overview of Control
 Chapter 1 Executive Summary Rapid advances in computing, communications, and sensing technology offer unprecedented opportunities for the field of control to expand its contributions to the economic and
Chapter 1 Executive Summary Rapid advances in computing, communications, and sensing technology offer unprecedented opportunities for the field of control to expand its contributions to the economic and
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
AC : A STUDENT-ORIENTED CONTROL LABORATORY US- ING PROGRAM CC
 AC 2011-490: A STUDENT-ORIENTED CONTROL LABORATORY US- ING PROGRAM CC Ziqian Liu, SUNY Maritime College Ziqian Liu received the Ph.D. degree from the Southern Illinois University Carbondale in 2005. He
AC 2011-490: A STUDENT-ORIENTED CONTROL LABORATORY US- ING PROGRAM CC Ziqian Liu, SUNY Maritime College Ziqian Liu received the Ph.D. degree from the Southern Illinois University Carbondale in 2005. He
HACETTEPE ÜNİVERSİTESİ COMPUTER ENGINEERING DEPARTMENT BACHELOR S DEGREE INFORMATION OF DEGREE PROGRAM 2012
 HACETTEPE ÜNİVERSİTESİ COMPUTER ENGINEERING DEPARTMENT BACHELOR S DEGREE INFORMATION OF DEGREE PROGRAM 2012 1 a. General Description Hacettepe University, Computer Engineering Department, was established
HACETTEPE ÜNİVERSİTESİ COMPUTER ENGINEERING DEPARTMENT BACHELOR S DEGREE INFORMATION OF DEGREE PROGRAM 2012 1 a. General Description Hacettepe University, Computer Engineering Department, was established
EECS150 - Digital Design Lecture 28 Course Wrap Up. Recap 1
 EECS150 - Digital Design Lecture 28 Course Wrap Up Dec. 5, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 28 Course Wrap Up Dec. 5, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
THE USE OF LEGO MINDSTORMS NXT ROBOTS IN THE TEACHING OF INTRODUCTORY JAVA PROGRAMMING TO UNDERGRADUATE STUDENTS
 THE USE OF LEGO MINDSTORMS NXT ROBOTS IN THE TEACHING OF INTRODUCTORY JAVA PROGRAMMING TO UNDERGRADUATE STUDENTS Elizabeth A. Gandy: University of Sunderland Department of Computing, Engineering & Technology,
THE USE OF LEGO MINDSTORMS NXT ROBOTS IN THE TEACHING OF INTRODUCTORY JAVA PROGRAMMING TO UNDERGRADUATE STUDENTS Elizabeth A. Gandy: University of Sunderland Department of Computing, Engineering & Technology,
Proseminar Roboter und Aktivmedien. Outline of today s lecture. Acknowledgments. Educational robots achievements and challenging
 Proseminar Roboter und Aktivmedien Educational robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University
Proseminar Roboter und Aktivmedien Educational robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University
William Milam Ford Motor Co
 Sharing technology for a stronger America Verification Challenges in Automotive Embedded Systems William Milam Ford Motor Co Chair USCAR CPS Task Force 10/20/2011 What is USCAR? The United States Council
Sharing technology for a stronger America Verification Challenges in Automotive Embedded Systems William Milam Ford Motor Co Chair USCAR CPS Task Force 10/20/2011 What is USCAR? The United States Council
Cyber Physical Systems: Next Generation of Embedded Systems
 Institute for Software Integrated Systems Vanderbilt University Cyber Physical Systems: Next Generation of Embedded Systems Janos Sztipanovits ISIS, Vanderbilt University 27 September, 2010 Outline Cyber
Institute for Software Integrated Systems Vanderbilt University Cyber Physical Systems: Next Generation of Embedded Systems Janos Sztipanovits ISIS, Vanderbilt University 27 September, 2010 Outline Cyber
Introduction to co-simulation. What is HW-SW co-simulation?
 Introduction to co-simulation CPSC489-501 Hardware-Software Codesign of Embedded Systems Mahapatra-TexasA&M-Fall 00 1 What is HW-SW co-simulation? A basic definition: Manipulating simulated hardware with
Introduction to co-simulation CPSC489-501 Hardware-Software Codesign of Embedded Systems Mahapatra-TexasA&M-Fall 00 1 What is HW-SW co-simulation? A basic definition: Manipulating simulated hardware with
UNIT1. Keywords page 13-14
 UNIT1 Keywords page 13-14 What is a Robot? A robot is a machine that can do the work of a human. Robots can be automatic, or they can be computer-controlled. Robots are a part of everyday life. Most robots
UNIT1 Keywords page 13-14 What is a Robot? A robot is a machine that can do the work of a human. Robots can be automatic, or they can be computer-controlled. Robots are a part of everyday life. Most robots
DIGF 6B21 Ubiquitous Computing
 DIGF 6B21 Ubiquitous Computing NUMBER OF CREDITS: 1.5 Day and Time: Tuesdays 18:30 21:30, beginning October 30th Location: Room 7301, 205 Richmond Professor: Nick Puckett Email: npuckett@faculty.ocadu.ca
DIGF 6B21 Ubiquitous Computing NUMBER OF CREDITS: 1.5 Day and Time: Tuesdays 18:30 21:30, beginning October 30th Location: Room 7301, 205 Richmond Professor: Nick Puckett Email: npuckett@faculty.ocadu.ca
Introducing 32-bit microcontroller technologies to a technology teacher training programme
 2 nd World Conference on Technology and Engineering Education 2011 WIETE Ljubljana, Slovenia, 5-8 September 2011 Introducing 32-bit microcontroller technologies to a technology teacher training programme
2 nd World Conference on Technology and Engineering Education 2011 WIETE Ljubljana, Slovenia, 5-8 September 2011 Introducing 32-bit microcontroller technologies to a technology teacher training programme
DESIGN TECHNOLOGY FOR THE TRILLION-DEVICE FUTURE
 DESIGN TECHNOLOGY FOR THE TRILLION-DEVICE FUTURE Alberto Sangiovanni-Vincentelli The Edgar L. and Harold H. Buttner Chair of EECS, University of California at Berkeley The Emerging IT Scene! The Cloud!
DESIGN TECHNOLOGY FOR THE TRILLION-DEVICE FUTURE Alberto Sangiovanni-Vincentelli The Edgar L. and Harold H. Buttner Chair of EECS, University of California at Berkeley The Emerging IT Scene! The Cloud!
ME 461 Laboratory #5 Characterization and Control of PMDC Motors
 ME 461 Laboratory #5 Characterization and Control of PMDC Motors Goals: 1. Build an op-amp circuit and use it to scale and shift an analog voltage. 2. Calibrate a tachometer and use it to determine motor
ME 461 Laboratory #5 Characterization and Control of PMDC Motors Goals: 1. Build an op-amp circuit and use it to scale and shift an analog voltage. 2. Calibrate a tachometer and use it to determine motor
Closed-Loop Transportation Simulation. Outlines
 Closed-Loop Transportation Simulation Deyang Zhao Mentor: Unnati Ojha PI: Dr. Mo-Yuen Chow Aug. 4, 2010 Outlines 1 Project Backgrounds 2 Objectives 3 Hardware & Software 4 5 Conclusions 1 Project Background
Closed-Loop Transportation Simulation Deyang Zhao Mentor: Unnati Ojha PI: Dr. Mo-Yuen Chow Aug. 4, 2010 Outlines 1 Project Backgrounds 2 Objectives 3 Hardware & Software 4 5 Conclusions 1 Project Background
TigreSAT 2010 &2011 June Monthly Report
 2010-2011 TigreSAT Monthly Progress Report EQUIS ADS 2010 PAYLOAD No changes have been done to the payload since it had passed all the tests, requirements and integration that are necessary for LSU HASP
2010-2011 TigreSAT Monthly Progress Report EQUIS ADS 2010 PAYLOAD No changes have been done to the payload since it had passed all the tests, requirements and integration that are necessary for LSU HASP
WifiBotics. An Arduino Based Robotics Workshop
 WifiBotics An Arduino Based Robotics Workshop WifiBotics is the workshop designed by RoboKart group pioneers in this field way back in 2014 and copied by many competitors. This workshop is based on the
WifiBotics An Arduino Based Robotics Workshop WifiBotics is the workshop designed by RoboKart group pioneers in this field way back in 2014 and copied by many competitors. This workshop is based on the
CS 730/830: Intro AI. Prof. Wheeler Ruml. TA Bence Cserna. Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1
 CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
ICTCM 28th International Conference on Technology in Collegiate Mathematics
 ARDUINO IN THE CLASSROOM: CLASSROOM READY MODULES FOR UNDERGRADUATE MATHEMATICS Michael D. Seminelli 1 Department of Mathematical Sciences United States Military Academy West Point, NY 10996 Michael.Seminelli@usma.edu
ARDUINO IN THE CLASSROOM: CLASSROOM READY MODULES FOR UNDERGRADUATE MATHEMATICS Michael D. Seminelli 1 Department of Mathematical Sciences United States Military Academy West Point, NY 10996 Michael.Seminelli@usma.edu
Page 1. Relays. Poles and Throws. Relay Types. Common embedded system problem CS/ECE 6780/5780. Al Davis. Terminology used for switches
 Relays CS/ECE 6780/5780 Al Davis Today s topics: Relays & Motors prelude to 5780 Lab 9 Common embedded system problem digital control: relatively small I & V levels controlled device requires significantly
Relays CS/ECE 6780/5780 Al Davis Today s topics: Relays & Motors prelude to 5780 Lab 9 Common embedded system problem digital control: relatively small I & V levels controlled device requires significantly
 Building safe, smart, and efficient embedded systems for applications in life-critical control, communication, and computation. http://precise.seas.upenn.edu The Future of CPS We established the Penn Research
Building safe, smart, and efficient embedded systems for applications in life-critical control, communication, and computation. http://precise.seas.upenn.edu The Future of CPS We established the Penn Research
NSF. Hybrid Systems: From Models to Code. Tom Henzinger. UC Berkeley. French Guyana, June 4, 1996 $800 million embedded software failure
 Hybrid Systems: From Models to Code Tom Henzinger UC Berkeley NSF UC Berkeley: Chess Vanderbilt University: ISIS University of Memphis: MSI Foundations of Hybrid and Embedded Software Systems French Guyana,
Hybrid Systems: From Models to Code Tom Henzinger UC Berkeley NSF UC Berkeley: Chess Vanderbilt University: ISIS University of Memphis: MSI Foundations of Hybrid and Embedded Software Systems French Guyana,
Synthesis for Robotics
 Synthesis for Robotics Contributors: Lydia Kavraki, Hadas Kress-Gazit, Stéphane Lafortune, George Pappas, Sanjit A. Seshia, Paulo Tabuada, Moshe Vardi, Ayca Balkan, Jonathan DeCastro, Rüdiger Ehlers, Gangyuan
Synthesis for Robotics Contributors: Lydia Kavraki, Hadas Kress-Gazit, Stéphane Lafortune, George Pappas, Sanjit A. Seshia, Paulo Tabuada, Moshe Vardi, Ayca Balkan, Jonathan DeCastro, Rüdiger Ehlers, Gangyuan
Timed Games UPPAAL-TIGA. Alexandre David
 Timed Games UPPAAL-TIGA Alexandre David 1.2.05 Overview Timed Games. Algorithm (CONCUR 05). Strategies. Code generation. Architecture of UPPAAL-TIGA. Interactive game. Timed Games with Partial Observability.
Timed Games UPPAAL-TIGA Alexandre David 1.2.05 Overview Timed Games. Algorithm (CONCUR 05). Strategies. Code generation. Architecture of UPPAAL-TIGA. Interactive game. Timed Games with Partial Observability.
CPS-Ed 2014 Cyber-Physical Systems Education Workshop at UC Berkeley
 CPS-Ed 2014 Cyber-Physical Systems Education Workshop at UC Berkeley David M. Auslander Mechanical Engineering University of California, Berkeley dma@me.berkeley.edu Agenda Cyber-Physical Systems Mechatronics
CPS-Ed 2014 Cyber-Physical Systems Education Workshop at UC Berkeley David M. Auslander Mechanical Engineering University of California, Berkeley dma@me.berkeley.edu Agenda Cyber-Physical Systems Mechatronics
Electrical and Automation Engineering, Fall 2018 Spring 2019, modules and courses inside modules.
 Electrical and Automation Engineering, Fall 2018 Spring 2019, modules and courses inside modules. Period 1: 27.8.2018 26.10.2018 MODULE INTRODUCTION TO AUTOMATION ENGINEERING This module introduces the
Electrical and Automation Engineering, Fall 2018 Spring 2019, modules and courses inside modules. Period 1: 27.8.2018 26.10.2018 MODULE INTRODUCTION TO AUTOMATION ENGINEERING This module introduces the
Effective Teaching Learning Process for PID Controller Based on Experimental Setup with LabVIEW
 Effective Teaching Learning Process for PID Controller Based on Experimental Setup with LabVIEW Komal Sampatrao Patil & D.R.Patil Electrical Department, Walchand college of Engineering, Sangli E-mail :
Effective Teaching Learning Process for PID Controller Based on Experimental Setup with LabVIEW Komal Sampatrao Patil & D.R.Patil Electrical Department, Walchand college of Engineering, Sangli E-mail :
Foundations of Hybrid and Embedded Software and Systems: Project Overview
 Foundations of Hybrid and Embedded Software and Systems: Project Overview Edited and presented by S. Shankar Sastry, PI UC Berkeley Chess Review November 18, 2004 Berkeley, CA NSF-ITR Investigators Ruzena
Foundations of Hybrid and Embedded Software and Systems: Project Overview Edited and presented by S. Shankar Sastry, PI UC Berkeley Chess Review November 18, 2004 Berkeley, CA NSF-ITR Investigators Ruzena
6.081, Fall Semester, 2006 Assignment for Week 6 1
 6.081, Fall Semester, 2006 Assignment for Week 6 1 MASSACHVSETTS INSTITVTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.099 Introduction to EECS I Fall Semester, 2006 Assignment
6.081, Fall Semester, 2006 Assignment for Week 6 1 MASSACHVSETTS INSTITVTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.099 Introduction to EECS I Fall Semester, 2006 Assignment
Human Factors in Control
 Human Factors in Control J. Brooks 1, K. Siu 2, and A. Tharanathan 3 1 Real-Time Optimization and Controls Lab, GE Global Research 2 Model Based Controls Lab, GE Global Research 3 Human Factors Center
Human Factors in Control J. Brooks 1, K. Siu 2, and A. Tharanathan 3 1 Real-Time Optimization and Controls Lab, GE Global Research 2 Model Based Controls Lab, GE Global Research 3 Human Factors Center
Preparing the Leaders for Mechatronics Education
 Preparing the Leaders for Mechatronics Education Sema E. Alptekin Industrial and Manufacturing Engineering Department Cal Poly, San Luis Obispo salpteki@calpoly.edu Abstract Mechatronics is the synergetic
Preparing the Leaders for Mechatronics Education Sema E. Alptekin Industrial and Manufacturing Engineering Department Cal Poly, San Luis Obispo salpteki@calpoly.edu Abstract Mechatronics is the synergetic
Fuzzy Logic Controlled Miniature LEGO Robot for Undergraduate Training System
 Fuzzy Logic Controlled Miniature LEGO Robot for Undergraduate Training System N. Z. Azlan 1, F. Zainudin 2, H. M. Yusuf 3, S. F. Toha 4, S. Z. S. Yusoff 5, N. H. Osman 6 Department of Mechatronics, Faculty
Fuzzy Logic Controlled Miniature LEGO Robot for Undergraduate Training System N. Z. Azlan 1, F. Zainudin 2, H. M. Yusuf 3, S. F. Toha 4, S. Z. S. Yusoff 5, N. H. Osman 6 Department of Mechatronics, Faculty
Fundamental Algorithms for System Modeling, Analysis, and Optimization
 Fundamental Algorithms for System Modeling, Analysis, and Optimization Jaijeet Roychowdhury, Stavros Tripakis UC Berkeley EECS 144/244 Fall 2015 Copyright 2010-date, E. A. Lee, J. Roychowdhury, S. A. Seshia,
Fundamental Algorithms for System Modeling, Analysis, and Optimization Jaijeet Roychowdhury, Stavros Tripakis UC Berkeley EECS 144/244 Fall 2015 Copyright 2010-date, E. A. Lee, J. Roychowdhury, S. A. Seshia,
MOST real-time software is structured either as threads
 1 PTIDES Model on a Distributed Testbed Emulating Smart Grid Real-Time Applications Slobodan Matic, Ilge Akkaya, Michael Zimmer, John C. Eidson and Edward A. Lee Abstract PTIDES, a programming model for
1 PTIDES Model on a Distributed Testbed Emulating Smart Grid Real-Time Applications Slobodan Matic, Ilge Akkaya, Michael Zimmer, John C. Eidson and Edward A. Lee Abstract PTIDES, a programming model for
Lab 23 Microcomputer-Based Motor Controller
 Lab 23 Microcomputer-Based Motor Controller Page 23.1 Lab 23 Microcomputer-Based Motor Controller This laboratory assignment accompanies the book, Embedded Microcomputer Systems: Real Time Interfacing,
Lab 23 Microcomputer-Based Motor Controller Page 23.1 Lab 23 Microcomputer-Based Motor Controller This laboratory assignment accompanies the book, Embedded Microcomputer Systems: Real Time Interfacing,
PC s and Micro-Controllers in Mechatronics Education. Santosh Devasia and Sanford Meek
 PC s and Micro-Controllers in Mechatronics Education Santosh Devasia and Sanford Meek Department of Mechanical Engineering The University of Utah Salt Lake City, Utah 84112 Abstract The mechanical engineering
PC s and Micro-Controllers in Mechatronics Education Santosh Devasia and Sanford Meek Department of Mechanical Engineering The University of Utah Salt Lake City, Utah 84112 Abstract The mechanical engineering
ROBOTICS & IOT. Workshop Module
 ROBOTICS & IOT Workshop Module CURRICULUM STRUCTURE DURATION : 2 day (16 hours) Session 1 Let's Learn Embedded System & Robotics Description Under this topic, we will discuss basics and give brief idea
ROBOTICS & IOT Workshop Module CURRICULUM STRUCTURE DURATION : 2 day (16 hours) Session 1 Let's Learn Embedded System & Robotics Description Under this topic, we will discuss basics and give brief idea
ROBOTICS & IOT. Workshop Module
 ROBOTICS & IOT Workshop Module CURRICULUM STRUCTURE DURATION : 2 day (16 hours) Session 1 Let's Learn Embedded System & Robotics Description Under this topic, we will discuss basics and give brief idea
ROBOTICS & IOT Workshop Module CURRICULUM STRUCTURE DURATION : 2 day (16 hours) Session 1 Let's Learn Embedded System & Robotics Description Under this topic, we will discuss basics and give brief idea
Laurea Specialistica in Ingegneria. Ingegneria dell'automazione: Sistemi in Tempo Reale
 Laurea Specialistica in Ingegneria dell'automazione Sistemi in Tempo Reale email: palopoli@sssup.it Tel. 050 883444 Introduzione Lecture schedule Introduction Selected topics on discrete time and sampled
Laurea Specialistica in Ingegneria dell'automazione Sistemi in Tempo Reale email: palopoli@sssup.it Tel. 050 883444 Introduzione Lecture schedule Introduction Selected topics on discrete time and sampled
AC : INTEGRATED HANDS-ON MECHANICAL SYSTEMS LAB- ORATORIES
 AC 2011-2653: INTEGRATED HANDS-ON MECHANICAL SYSTEMS LAB- ORATORIES Arif Sirinterlikci, Robert Morris University ARIF SIRINTERLIKCI received B.S. and M.S. degrees in Mechanical Engineering from Istanbul
AC 2011-2653: INTEGRATED HANDS-ON MECHANICAL SYSTEMS LAB- ORATORIES Arif Sirinterlikci, Robert Morris University ARIF SIRINTERLIKCI received B.S. and M.S. degrees in Mechanical Engineering from Istanbul
Using Magnetic Sensors for Absolute Position Detection and Feedback. Kevin Claycomb University of Evansville
 Using Magnetic Sensors for Absolute Position Detection and Feedback. Kevin Claycomb University of Evansville Using Magnetic Sensors for Absolute Position Detection and Feedback. Abstract Several types
Using Magnetic Sensors for Absolute Position Detection and Feedback. Kevin Claycomb University of Evansville Using Magnetic Sensors for Absolute Position Detection and Feedback. Abstract Several types
DC motor control using arduino
 DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
Teaching Mechanical Students to Build and Analyze Motor Controllers
 Teaching Mechanical Students to Build and Analyze Motor Controllers Hugh Jack, Associate Professor Padnos School of Engineering Grand Valley State University Grand Rapids, MI email: jackh@gvsu.edu Session
Teaching Mechanical Students to Build and Analyze Motor Controllers Hugh Jack, Associate Professor Padnos School of Engineering Grand Valley State University Grand Rapids, MI email: jackh@gvsu.edu Session
Organized by the Computing Community Consortium Honorary Co-Sponsors: Congressman Bart Gordon (D-TN) Congressman Ralph Hall (R-TX) Congressman Daniel
 Congressman Ralph Hall (R-TX) Congressman Daniel") Organized by the Computing Community Consortium Honorary Co-Sponsors: Congressman Bart Gordon (D-TN) Congressman Ralph Hall (R-TX) Congressman Daniel Lipinski (D-IL) Congressman Vern Ehlers (R-MI) Congressman
Organized by the Computing Community Consortium Honorary Co-Sponsors: Congressman Bart Gordon (D-TN) Congressman Ralph Hall (R-TX) Congressman Daniel Lipinski (D-IL) Congressman Vern Ehlers (R-MI) Congressman
Introduction to Real-time software systems Draft Edition
 Introduction to Real-time software systems Draft Edition Jan van Katwijk Janusz Zalewski DRAFT VERSION of November 2, 1998 2 Chapter 1 Introduction 1.1 General introduction Information technology is of
Introduction to Real-time software systems Draft Edition Jan van Katwijk Janusz Zalewski DRAFT VERSION of November 2, 1998 2 Chapter 1 Introduction 1.1 General introduction Information technology is of
Real-time Real-life Oriented DSP Lab Modules
 Paper ID #13259 Real-time Real-life Oriented DSP Lab Modules Mr. Isaiah I. Ryan, Western Washington University Isaiah I. Ryan is currently a senior student in the Electronics Engineering Technology program
Paper ID #13259 Real-time Real-life Oriented DSP Lab Modules Mr. Isaiah I. Ryan, Western Washington University Isaiah I. Ryan is currently a senior student in the Electronics Engineering Technology program
Robotics II DESCRIPTION. EXAM INFORMATION Items
 EXAM INFORMATION Items 37 Points 49 Prerequisites NONE Grade Level 10-12 Course Length ONE SEMESTER Career Cluster MANUFACTURING SCIENCE, TECHNOLOGY, ENGINEERING, AND MATHEMATICS Performance Standards
EXAM INFORMATION Items 37 Points 49 Prerequisites NONE Grade Level 10-12 Course Length ONE SEMESTER Career Cluster MANUFACTURING SCIENCE, TECHNOLOGY, ENGINEERING, AND MATHEMATICS Performance Standards
MICROCONTROLLERS Stepper motor control with Sequential Logic Circuits
 PH-315 MICROCONTROLLERS Stepper motor control with Sequential Logic Circuits Portland State University Summary Four sequential digital waveforms are used to control a stepper motor. The main objective
PH-315 MICROCONTROLLERS Stepper motor control with Sequential Logic Circuits Portland State University Summary Four sequential digital waveforms are used to control a stepper motor. The main objective
A Do-and-See Approach for Learning Mechatronics Concepts
 Proceedings of the 5 th International Conference of Control, Dynamic Systems, and Robotics (CDSR'18) Niagara Falls, Canada June 7 9, 2018 Paper No. 124 DOI: 10.11159/cdsr18.124 A Do-and-See Approach for
Proceedings of the 5 th International Conference of Control, Dynamic Systems, and Robotics (CDSR'18) Niagara Falls, Canada June 7 9, 2018 Paper No. 124 DOI: 10.11159/cdsr18.124 A Do-and-See Approach for
Lecture 26 ANNOUNCEMENTS OUTLINE. Self-biased current sources BJT MOSFET Guest lecturer Prof. Niknejad
 Lecture 26 ANNOUNCEMENTS Homework 12 due Thursday, 12/6 OUTLINE Self-biased current sources BJT MOSFET Guest lecturer Prof. Niknejad EE105 Fall 2007 Lecture 26, Slide 1 Prof. Liu, UC Berkeley Review: Current
Lecture 26 ANNOUNCEMENTS Homework 12 due Thursday, 12/6 OUTLINE Self-biased current sources BJT MOSFET Guest lecturer Prof. Niknejad EE105 Fall 2007 Lecture 26, Slide 1 Prof. Liu, UC Berkeley Review: Current
Passive Bilateral Teleoperation
 Passive Bilateral Teleoperation Project: Reconfigurable Control of Robotic Systems Over Networks Márton Lırinc Dept. Of Electrical Engineering Sapientia University Overview What is bilateral teleoperation?
Passive Bilateral Teleoperation Project: Reconfigurable Control of Robotic Systems Over Networks Márton Lırinc Dept. Of Electrical Engineering Sapientia University Overview What is bilateral teleoperation?
Robotics for Engineering Education
 Robotics for Engineering Education School of Engineering and Advanced Technology Massey University Dr. Loulin Huang RoboCup 2010 Symposium, Singapore, 25 June 2010 Outline Introduction some observation
Robotics for Engineering Education School of Engineering and Advanced Technology Massey University Dr. Loulin Huang RoboCup 2010 Symposium, Singapore, 25 June 2010 Outline Introduction some observation
Laboratory Seven Stepper Motor and Feedback Control
 EE3940 Microprocessor Systems Laboratory Prof. Andrew Campbell Spring 2003 Groups Names Laboratory Seven Stepper Motor and Feedback Control In this experiment you will experiment with a stepper motor and
EE3940 Microprocessor Systems Laboratory Prof. Andrew Campbell Spring 2003 Groups Names Laboratory Seven Stepper Motor and Feedback Control In this experiment you will experiment with a stepper motor and
Increasing the precision of mobile sensing systems through super-sampling
 Increasing the precision of mobile sensing systems through super-sampling RJ Honicky, Eric A. Brewer, John F. Canny, Ronald C. Cohen Department of Computer Science, UC Berkeley Email: {honicky,brewer,jfc}@cs.berkeley.edu
Increasing the precision of mobile sensing systems through super-sampling RJ Honicky, Eric A. Brewer, John F. Canny, Ronald C. Cohen Department of Computer Science, UC Berkeley Email: {honicky,brewer,jfc}@cs.berkeley.edu
Formal Methods for Semi-Autonomous Driving
 Formal Methods for Semi-Autonomous Driving Sanjit A. Seshia Dorsa Sadigh S. Shankar Sastry UC Berkeley {sseshia,dsadigh,sastry}@eecs.berkeley.edu ABSTRACT We give an overview of the main challenges in
Formal Methods for Semi-Autonomous Driving Sanjit A. Seshia Dorsa Sadigh S. Shankar Sastry UC Berkeley {sseshia,dsadigh,sastry}@eecs.berkeley.edu ABSTRACT We give an overview of the main challenges in
Prototyping Automotive Cyber- Physical Systems
 Prototyping Automotive Cyber- Physical Systems Sebastian Osswald Technische Universität München Boltzmannstr. 15 Garching b. München, Germany osswald@ftm.mw.tum.de Stephan Matz Technische Universität München
Prototyping Automotive Cyber- Physical Systems Sebastian Osswald Technische Universität München Boltzmannstr. 15 Garching b. München, Germany osswald@ftm.mw.tum.de Stephan Matz Technische Universität München
Integrated Safety Envelopes
 Integrated Safety Envelopes Built-in Restrictions of Navigable Airspace Edward A. Lee Professor, EECS, UC Berkeley NSF / OSTP Workshop on Information Technology Research for Critical Infrastructure Protection
Integrated Safety Envelopes Built-in Restrictions of Navigable Airspace Edward A. Lee Professor, EECS, UC Berkeley NSF / OSTP Workshop on Information Technology Research for Critical Infrastructure Protection
AC : THE UBIQUITOUS MICROCONTROLLER IN MECHANICAL ENGINEERING: MEASUREMENT SYSTEMS
 AC 8-1513: THE UBIQUITOUS MICROCONTROLLER IN MECHANICAL ENGINEERING: MEASUREMENT SYSTEMS Michael Holden, California Maritime Academy Michael Holden teaches in the department of Mechanical Engineering at
AC 8-1513: THE UBIQUITOUS MICROCONTROLLER IN MECHANICAL ENGINEERING: MEASUREMENT SYSTEMS Michael Holden, California Maritime Academy Michael Holden teaches in the department of Mechanical Engineering at
MathWorks Announces Built-in Simulink Support for Arduino, BeagleBoard, and LEGO MINDSTORMS NXT
 MathWorks Announces Built-in Simulink Support for Arduino, BeagleBoard, and LEGO MINDSTORMS NXT With one click, engineers run Simulink control system and signal processing algorithms in hardware http://www.mathworks.com/company/newsroom/mathworks-announces-built-in-simulink-
MathWorks Announces Built-in Simulink Support for Arduino, BeagleBoard, and LEGO MINDSTORMS NXT With one click, engineers run Simulink control system and signal processing algorithms in hardware http://www.mathworks.com/company/newsroom/mathworks-announces-built-in-simulink-
COS 402 Machine Learning and Artificial Intelligence Fall Lecture 1: Intro
 COS 402 Machine Learning and Artificial Intelligence Fall 2016 Lecture 1: Intro Sanjeev Arora Elad Hazan Today s Agenda Defining intelligence and AI state-of-the-art, goals Course outline AI by introspection
COS 402 Machine Learning and Artificial Intelligence Fall 2016 Lecture 1: Intro Sanjeev Arora Elad Hazan Today s Agenda Defining intelligence and AI state-of-the-art, goals Course outline AI by introspection
Penn State University ESM Ultrasonics R&D Laboratory Joseph L. Rose Research Activities
 Penn State University ESM Ultrasonics R&D Laboratory Joseph L. Rose Research Activities Crack Detection in Green Compacts The Center for Innovative Sintered Products Identifying cracked green parts before
Penn State University ESM Ultrasonics R&D Laboratory Joseph L. Rose Research Activities Crack Detection in Green Compacts The Center for Innovative Sintered Products Identifying cracked green parts before
IMGD 3xxx - HCI for Real, Virtual, and Teleoperated Environments: Introduction. by Robert W. Lindeman
 IMGD 3xxx - HCI for Real, Virtual, and Teleoperated Environments: Introduction by Robert W. Lindeman gogo@wpi.edu Motivation Some interesting recent developments Mobile computer systems are cheap, powerful,
IMGD 3xxx - HCI for Real, Virtual, and Teleoperated Environments: Introduction by Robert W. Lindeman gogo@wpi.edu Motivation Some interesting recent developments Mobile computer systems are cheap, powerful,
Introducing the Quadrotor Flying Robot
 Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Introducing the Quadrotor Flying Robot Roy Brewer Organizer Philadelphia Robotics Meetup Group August 13, 2009 What is a Quadrotor? A vehicle having 4 rotors (propellers) at each end of a square cross
Lab Exercise 9: Stepper and Servo Motors
 ME 3200 Mechatronics Laboratory Lab Exercise 9: Stepper and Servo Motors Introduction In this laboratory exercise, you will explore some of the properties of stepper and servomotors. These actuators are
ME 3200 Mechatronics Laboratory Lab Exercise 9: Stepper and Servo Motors Introduction In this laboratory exercise, you will explore some of the properties of stepper and servomotors. These actuators are
RUNNYMEDE COLLEGE & TECHTALENTS
 RUNNYMEDE COLLEGE & TECHTALENTS Why teach Scratch? The first programming language as a tool for writing programs. The MIT Media Lab's amazing software for learning to program, Scratch is a visual, drag
RUNNYMEDE COLLEGE & TECHTALENTS Why teach Scratch? The first programming language as a tool for writing programs. The MIT Media Lab's amazing software for learning to program, Scratch is a visual, drag
I.1 Smart Machines. Unit Overview:
 I Smart Machines I.1 Smart Machines Unit Overview: This unit introduces students to Sensors and Programming with VEX IQ. VEX IQ Sensors allow for autonomous and hybrid control of VEX IQ robots and other
I Smart Machines I.1 Smart Machines Unit Overview: This unit introduces students to Sensors and Programming with VEX IQ. VEX IQ Sensors allow for autonomous and hybrid control of VEX IQ robots and other
Robotics Education in Emerging Technology Regions
 Robotics Education in Emerging Technology Regions G. Ayorkor Mills-Tettey Robotics Institute, Carnegie Mellon University M. Bernardine Dias, Brett Browning (Carnegie Mellon University) Nathan Amanquah
Robotics Education in Emerging Technology Regions G. Ayorkor Mills-Tettey Robotics Institute, Carnegie Mellon University M. Bernardine Dias, Brett Browning (Carnegie Mellon University) Nathan Amanquah
National Instruments Accelerating Innovation and Discovery
 National Instruments Accelerating Innovation and Discovery There s a way to do it better. Find it. Thomas Edison Engineers and scientists have the power to help meet the biggest challenges our planet faces
National Instruments Accelerating Innovation and Discovery There s a way to do it better. Find it. Thomas Edison Engineers and scientists have the power to help meet the biggest challenges our planet faces
Chapter 1. Robots and Programs
 Chapter 1 Robots and Programs 1 2 Chapter 1 Robots and Programs Introduction Without a program, a robot is just an assembly of electronic and mechanical components. This book shows you how to give it a
Chapter 1 Robots and Programs 1 2 Chapter 1 Robots and Programs Introduction Without a program, a robot is just an assembly of electronic and mechanical components. This book shows you how to give it a
Future battery technologies FET Flagship
 Future battery technologies FET Flagship BATTERY 2030+ initiative coordinator: Prof. Kristina Edström, Uppsala University, Sweden Deputy coordinator: Dr. Simon Perraud, CEA, France November 16, 2018 Batteries
Future battery technologies FET Flagship BATTERY 2030+ initiative coordinator: Prof. Kristina Edström, Uppsala University, Sweden Deputy coordinator: Dr. Simon Perraud, CEA, France November 16, 2018 Batteries
Physical Etoys: Freedom beyond the digital world
 Physical Etoys: Freedom beyond the digital world Gonzalo Zabala 1, Ricardo Morán 1, Sebastián Blanco 1 1 Universidad Abierta Interamericana, Buenos Aires, Argentina {gonzalo.zabala, ricardo.moran, sebastian.blanco}@uai.edu.ar
Physical Etoys: Freedom beyond the digital world Gonzalo Zabala 1, Ricardo Morán 1, Sebastián Blanco 1 1 Universidad Abierta Interamericana, Buenos Aires, Argentina {gonzalo.zabala, ricardo.moran, sebastian.blanco}@uai.edu.ar
6.111 Lecture # 19. Controlling Position. Some General Features of Servos: Servomechanisms are of this form:
 6.111 Lecture # 19 Controlling Position Servomechanisms are of this form: Some General Features of Servos: They are feedback circuits Natural frequencies are 'zeros' of 1+G(s)H(s) System is unstable if
6.111 Lecture # 19 Controlling Position Servomechanisms are of this form: Some General Features of Servos: They are feedback circuits Natural frequencies are 'zeros' of 1+G(s)H(s) System is unstable if
University of Technology. Control and Systems Eng. Dept. Curriculum Vitae (C.V.)
") University of Technology Control and Dept. Curriculum Vitae (C.V.) Last updated: 1/8/2017 Full name: Assist. Prof. Dr. LAITH JASIM SAUD Gender: Date of birth : Nationality : Place of work : Languages:
University of Technology Control and Dept. Curriculum Vitae (C.V.) Last updated: 1/8/2017 Full name: Assist. Prof. Dr. LAITH JASIM SAUD Gender: Date of birth : Nationality : Place of work : Languages: