Human-Robot Interaction from Dance Partner Robot to Co-worker Robot
|
|
|
- Randolph Rogers
- 6 years ago
- Views:
Transcription

1 Human-Robot Interaction from Dance Partner Robot to Co-worker Robot Kazuhiro Kosuge Systems Robotics Lab. Department of Robotics Graduate School of Engineering Tohoku University Sendai , JAPAN
2 Outline Challenges and Opportunities of Robotics Overview of Robotics (by JST in 2009) Examples of Physical Human-Robot Interaction Dance Partner Robots MS DanceR and PBDR RoboDANTE PaDY PaDY in a factory Conclusions
3 Outline Challenges and Opportunities of Robotics Overview of Robotics (by JST in 2009) Examples of Physical Human-Robot Interaction Dance Partner Robots MS DanceR and PBDR RoboDANTE PaDY PaDY in a factory Conclusion
4 Robotics Societal Level Societal Values Service Level Service enablers Services Fundamental Technologies Level Foundations CRDS, JST, 2009, Modified by Kosuge, August, 2011
5 Societal Values For Individuals For Communities For Families For Industries For Local Government For Nations For the Globe Quality of Life Industrial Competitiveness Global Issues CRDS, JST, 2009, Modified by Kosuge, August, 2011
6 Challenges and Opportunities of Robotics Social Value Services Emerging Technology Fundamental Global Level Community Level Quality of Life Environmental Monitoring Natural Resources Exploration and Development Space Exploration Deep Undersea and Underground Exploration Anti-terrorism Rescue Operation Prevention of Infectious Diseases Robot Systems Integration Human Robot Interaction Real-world Real-time Intelligence Spatio-temporal System Design Sensing and Machine Cognition Government Service Agriculture Forestry Fishery Mining Manufacturing Construction Wastes Treatment/ Management Cyborg (Cybernetic organism) Stochasticity in Robotics Performance evaluation and Benchmarking Ambient intelligence Autonomous Robots Teleoperation Robotic Emotion (artificial emotion) Utilities Retailer/Wholesaler Transportation Communication Service Industries Medicine Education Research and Development Medicine Therapy Daily Life Assist Healthcare Rehabilitation Mental care Learning Child care Housekeeping Software framework Social Concerns Functional Safety Nano-micro Robotics Human Modeling Wearable Technology Service Contents Design Robot Kinematics and Dynamics Manipulation Mobility Actuation Physics-based Control Security Mobility Shopping Hobby Entertainment Sports Comfort Life Watch Communication Service/Application-oriented Robotics Robotics Foundations CRDS, JST, 2009, Modified by Kosuge, August, 2011
7 Robotics Research Unit Technologies Technical Issues Required Services Domain 1 Elderly Care Domain 2 Agriculture Domain 3 Medicine Applications/Services New Services Service/Applicationoriented Robotics Robotics Foundations Robotics Foundations Current Robot Function CRDS, JST, 2009, Modified by Kosuge, August, 2011
8 Robotics Research Unit Technologies Technical Issues Required Services New Services Domain 1 Elderly Care Domain Design 2a service/services Domain 3 necessary Applications/Services Agriculture Medicine for the application as a sustainable business. Service/Applicationoriented Robotics Robotics Foundations Robotics Foundations Current Robot Function CRDS, JST, 2009, Modified by Kosuge, August, 2011
9 Robotics Research Unit Technologies Technical Issues Required Services New Services Domain 1 Elderly Care Domain Design 2a service/services Domain 3 necessary Applications/Services Agriculture Medicine for the application as a sustainable business. Service/Applicationoriented Robotics Enhance Robotics unit technologies to meet Foundations the requirements for the service/services. Current Robot Function Robotics Foundations CRDS, JST, 2009, Modified by Kosuge, August, 2011
10 Robotics Research Unit Technologies Technical Issues Required Services New Services Domain 1 Elderly Care Domain Design 2a service/services Domain 3 necessary Applications/Services Agriculture Medicine for the application as a sustainable business. Develop new fundamentals necessary for the service/services. Service/Applicationoriented Robotics Enhance Robotics unit technologies to meet Foundations the requirements for the service/services. Current Robot Function Robotics Foundations CRDS, JST, 2009, Modified by Kosuge, August, 2011
11 Robotics Research Unit Technologies Technical Issues Required Services New Services Domain 1 Elderly Care Domain Design 2a service/services Domain 3 necessary Applications/Services Agriculture Medicine for the application as a sustainable business. Develop new fundamentals necessary for the service/services. Service/Applicationoriented Robotics Enhance Robotics unit technologies to meet Foundations the requirements for the service/services. Current Robot Function Robotics Foundations Enrich robotics foundations through application-oriented research CRDS, JST, 2009, Modified by Kosuge, August, 2011

12 Systems Robotics System robotics is a new field of robotics dealing with robot-related issues in real environments. Several prototypes of real world robots have been designed and developed based on robot technologies developed in our laboratory. Walking Helper Assistive Robotics Power Assisted Chair Cycle Intention Recognition/Transfer Intelligent Car Transportation Robot icart icart and icart Concept II Intelligent Car Autonomous-Robot- Transporters Robot Co-worker PaDY (in-time Parts/tools Delivery robot) Universal Robot Hand ugripp with Two-degrees of Freedom Assembly and Manipulauion by Dual Manipulators Stable Power Augmentation Human Robot Coordination Integration of Visual and Impedance Servo Mobile Manipulators Human-Robot Interaction Universal Manipulation Multiple Robots Coordination
13 Systems Robotics System robotics is a new field of robotics dealing with robot-related issues in real environments. Several prototypes of real world robots have been designed and developed based on robot technologies developed in our laboratory. Walking Helper Assistive Robotics Power Assisted Chair Cycle Intention Recognition/Transfer Intelligent Car Transportation Robot icart icart and icart Concept II Intelligent Car Autonomous-Robot- Transporters Robot Co-worker PaDY (in-time Parts/tools Delivery robot) Universal Robot Hand ugripp with Two-degrees of Freedom Assembly and Manipulauion by Dual Manipulators Stable Power Augmentation Human Robot Coordination Integration of Visual and Impedance Servo Mobile Manipulators Human-Robot Interaction Universal Manipulation Multiple Robots Coordination
 Examples of")

14 Outline Challenges and Opportunities of Robotics Overview of Robotics (by JST in 2009) Examples of Physical Human-Robot Interaction Dance Partner Robots MS DanceR and PBDR RoboDANTE PaDY PaDY in a factory Conclusion
15 Human Power Augmentation Operator Robot Environment Human Power Augmentation [1] K. Kosuge, Y. Fujisawa, T. Fukuda, Mechanical System Control with Man-Machine-Environment Interactions, [Proceedings of the 1993 IEEE International Conference on Robotics and Automation (1993) ]. [2] 小菅一弘, 藤沢佳生, 福田敏男, 環境との相互作用が生じるマン マシン系の制御, [ 日本機械学会論文集 (C 編 ) 59 (562) (1993) ].

16 Robot Helpers Human-Robot Cooperation (Kosuge, 1993)
17 Robot Helpers Robot j Robot i Object Human l Human m Robot k Passive Dynamics Stability Issues
![Robot Helpers MR Helper (Mobile Robot Helper, 1997~) [1] K. Kosuge, M.](/docs-images/79/79289110/images/18-1.jpg "Sato, Mobile Robot Helper, [Proceedings of the 2000 IEEE International Conference on Robotics and Automation (2000) 583-588].")
18 Robot Helpers MR Helper (Mobile Robot Helper, 1997~) [1] K. Kosuge, M. Sato, Mobile Robot Helper, [Proceedings of the 2000 IEEE International Conference on Robotics and Automation (2000) ]. [2] 小菅一弘, 須田理央, 風村典秀, 佐藤学, 角谷啓, 人と双腕型移動ロボット MR Helper による物体の協調搬送, [ 日本機械学会論文集 (C 編 ) 69 (685) (2003) 84-90].
19 Robot Helpers DR Helpers (Distributed Robot Helpers) Y. Hirata, K. Kosuge, Distributed Robot Helpers Handling a Single Object in Cooperation with a Human, [Proceedings of the 2000 IEEE International Conference on Robotics and Automations (2000) ]. 平田泰久, 初雁卓郎, 小菅一弘, 淺間一, 嘉悦早人, 川端邦明, 人間と複数の分散型ロボットヘルパ - との協調による単一物体の搬送, [ 日本機械学会論文集 (C 編 ) 68 (668) (2002) ].
20 Robot Helpers DR Helpers (Distributed Robot Helpers) Y. Hirata, Y. Kume, Z. D. Wang, K. Kosuge, Decentralized Control of Multiple Mobile Manipulators Based on Virtual 3-D Caster Motion for Handling an Object in Cooperation with a Human, [Proceedings of the 2003 IEEE International Conference on Robotics and Automation (2003) ].
21 Outline Challenges and Opportunities of Robotics Overview of Robotics (by JST in 2009) Examples of Physical Human-Robot Interaction Dance Partner Robots MS DanceR and PBDR RoboDANTE PaDY PaDY in a factory Conclusions

22 Lessons Learned DR Helper MR Helper
23 Lessons Learned from Robot Helpers Some simple tasks, which could not be done by a human/humans, could be done with a robot helper(s). General tasks could not be done easily even with the assistive robot system(s), because the robot does not know how to collaborate with the human.
24 Lessons Learned from Robot Helpers In order to collaborate with the user, the robot has to know the task, its user s intention, how the user wants to be assisted
25 Dance Partner Robot To develop a mechanism for closer human-robot coordination/interaction
26 Ballroom Dances A ballroom dance is performed by a dance couple, a male dancer and a female dancer. A dance consists of a set of figures of the dance.
27 Ballroom Dances The dance is lead by a male dancer. Which figure is coming next is controlled by the male dancer based on the rule of the dance and their surroundings.

28 Ballroom Dances The female dancer estimates the following figure at each figure transition through the interaction with the male dancer based on the knowledge of the dance.
29 Ballroom Dances The female dancer has to know the dance in order to dance with her partner: The set of the dance figures. The figure transition rule. How to be lead by the male dancer or how to estimate the partner s figure.


30 Dance Partner Robot MS DanceR


31 Aichi Expo (March 24 ~ September 25, 2005)



32 Design of Robot Mechanism DoF: Neck : 1 Waist : 3 Arms : 4 x 2 Omni-directional mobile base : 3 Designed by Nomura Unison Co. Ltd. in cooperation with Tohoku University
33 Force/Moment Sensory Data Used for Estimation Reference Data Dance Figure A Transition Dance Figure B T effective Time Time series data include uncertainty such as time-lag and variation because a dancer cannot always apply the same force/moment for each figure transition. T. Takeda, K. Kosuge, Y. Hirata, HMM-based Dance Step Estimation for Dance Partner Robot -MS DanceR-, [Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (2005) ].
34 Force/Moment Sensory Data Used for Estimation HMM-based Figure Estimator Reference Data Dance Figure A Transition Dance Figure B T effective Time T. Takeda, K. Kosuge, Y. Hirata, HMM-based Dance Step Estimation for Dance Partner Robot -MS DanceR-, [Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (2005) ].
35 Dance Partner Robot PBDR PBDR as a Research Platform for Human-robot interaction

36 Dance Partner Robots PBDR as a Research Platform for Physical Human-Robot Interaction

37 Dance Partner Robots PBDR as a Research Platform for Physical Human-Robot Interaction


38 Dance Partner Robot


39 Dance Partner Robot


40 Dance Partner Robot

41 Dance Partner Robot

42 PBDR in Korea
43 Outline Challenges and Opportunities of Robotics Overview of Robotics (by JST in 2009) Examples of Physical Human-Robot Interaction Dance Partner Robots MS DanceR and PBDR RoboDANTE PaDY PaDY in a factory Conclusions
44 Challenges for Dance Partner Robots Stable physical interaction between a human and a robot Female Dance Partner Robot Human behavior/intention estimation How to read the its partner s lead Male Dance Partner Robot How to convey robot s intention to its human partner Motion Entrainment Based on Human modeling

45 Challenges for Dance Partner Robots Stable physical interaction between a human and a robot Female Dance Partner Robot Human behavior/intention estimation How to read the its partner s lead Male Dance Partner Robot Dance Teaching Robot How to convey robot s intention to its human partner Motion Entrainment Based on Human modeling


46 Robot Design Upper Body Mechanical Assembly Whole Body Assembly Interactive Screen F/T Sensor LRF-1 PC Electronics Mobile Base LRF-2

47 Motion Tests
. Motion Analysis. Retrieved March 27, 2015, from http://www.")
48 Motion Analysis of Dancers Analysis of the motions in dance using motion capture system: COM cycle within a dance figure. An example of captured motions during the dance figure: closed change using commercially available software [1]. [1] Motion Analysis Corporation. (n.d.). Motion Analysis. Retrieved March 27, 2015, from

49 Motion Analysis of Dancers Example of four dance figures COM motions in 3D. COM cycle within a dance figure.
50 Z [m] Motion Analysis of Dancers X [m] Y [m] An example of COM Motions in 3D space 0 Z [m] X [m] -1 0 Z [m] Natural Turn 3D Trajectory Directional Change XY Trajectory Motion Initiation Z [m] ReverseTurn 3D Trajectory XY Trajectory X [m] Y [m] X [m] D Trajectory XY Trajectory During a dance figure in Waltz, we observed that COM motions is related to Motion initiation. Directional changes. Back W hisk W hisk and Chasse D Trajectory XY Trajecto
51 Motion Analysis of Dancers An example of COM Motions in 3D space Transition Motion Initiation During the transitions of dance figures in Waltz, we also observed the similar pattern in COM motions relating to motion initiation and figure transition.
: Bringing the partner s COM to an unstable equilibrium point")

52 Leading the Partner by COM Motion Guidance using COM motions through an unstable equilibrium point (G-UEP): Bringing the partner s COM to an unstable equilibrium point (UEP) by elevating the robot s COM during the physical interaction in the dance. Exerting a force in the desired motion direction. Unstable equilibrium point example. Example of guidance
![Evaluation of the Proposed Method Cycle Type 1 1Cycle Type 2 Cycle 23 Cycle Type 4 3Desired Type Traject. 4 0.7 0.6 47.71 46.91 0.5 Y [m] 0.4 0.3 0.2 0.1 F 12 F 34 29.](/docs-images/79/79289110/images/53-1.jpg "44 28.25 0-0.8-0.7-0.6-0.5-0.4-0.3-0.2-0.1 0 X [m] Example of trajectories achieved by a subject during the 4 types of test. Example video of experiments with subjects.")
53 Evaluation of the Proposed Method Cycle Type 1 1Cycle Type 2 Cycle 23 Cycle Type 4 3Desired Type Traject Y [m] F 12 F X [m] Example of trajectories achieved by a subject during the 4 types of test. Example video of experiments with subjects.
.")
54 Evaluation of the Proposed Method 100,00% Motion Understanding 80,00% 89,17% 90,42% 60,00% 71,92% 70,00% 40,00% 20,00% 0,00% 1. G-UEP with voice-over 2. Pure force with voice-over 3. G-UEP without voice-over 4. Pure force without voice-over Understanding of robot s intention of motion was evaluated with the percentage of success in the motion (correct direction of motion). G-UEP shows approximately 20% more motion direction understanding than pure force guidance. Voice-over on interactions did not show difference in the motion understanding rate.
55 Evaluation of the Proposed Method F 12 F 34 F 12 F 34 Significant reduction in interactions force was obtained by using the G-UEP.
56 Subjective Evaluation Comfort: Emotional states which people have positive feelings during interactions such as relief, ease, and comfortable. Peace of Mind: Emotional states that reflects the opposite to negative feelings during interaction such as uneasiness and stress with the robots. Performance: Evaluative judgment about the robot s ability to interact. Controllability: Evaluative judgment about negative aspect regarding the interaction with the robot such as performing unanticipated actions, and harming humans. Human-likeness: perceived similarity with humans in interactions. Enjoyability: self-evaluated level of enjoyment during the dance. Personal Growth: perceived personal improvement in the dance. Kamide, H., Kawabe, K., Shigemi, S., & Arai, T. (2015). Anshin as a concept of subjective well-being between humans and robots in Japan. Advanced Robotics, 29(24),
57 Subjective Evaluation Significant difference was obtained in factors of Comfort, Performance, and Humanlikeness. 100,00% 90,00% 88,00% 88,00% 80,00% 80,00% 86,00% 84,00% 72,00% 60,00% 60,00% 40,00% 20,00% 0,00% 92,00% 90,00% 90,00% 84,00% 94,00% 86,00% 74,00% 84,00% 78,00% 74,00% 76,00% 74,00% 68,80% 58,00% 59,20% 60,00% 60,00% 59,20% 44,00% 48,00% [G-UEP & Voice-over] [G-UEP without Voice-over] [Pure force with voice-over] [Pure force without voice-over]
58 Progressive Teaching The progressive teaching (PT) methodology is proposed based on Piagets theory of cognitive development states. Knowledge is constructed based on experiences related to mental, biological and physical stage of the development. [1] [1] L.-D. Hammond, K. Austin, and S. Orcutt, How People Learn, Stanford University, Tech. Rep., Proposed methodology: 1. Assessment of the skill based on the current stage of physical development. 2. Feedback of the assessed skill performance for enhancing skill model formation. 3. Physical feedback based on skill performance. Diego Felipe Paez Granados, Breno A. Yamamoto, Hiroko Kamide, Jun Kinugawa, and Kazuhiro Kosuge, Dance Teaching by a Robot: Combining Cognitive and Physical Human Robot Interaction for Supporting the Skill Learning Process, IEEE Robotics and Automation Letters, Voo.2, pp , 2017
59 Progressive Teaching The progressive teaching (PT) methodology is proposed based on Piagets theory of cognitive development states. Knowledge is constructed based on experiences related to mental, biological and physical stage of the development. [1] Proposed methodology: 1. Assessment of the skill based on the current stage of physical development. 2. Feedback of the assessed skill performance for enhancing skill model formation. 3. Physical feedback based on skill performance. [1] L.-D. Hammond, K. Austin, and S. Orcutt, How People Learn, Stanford University, Tech. Rep., 2001.
 X n (kτ) 2 represents the error and W n represent a n x n weighing matrix.")
60 Skill Assessment of Dance Actual Desired Analysis of the skill in the velocity profile permits a better assessment for any user. Skill is assessed based on mean squared error of velocity calculated as follows: Where e n = X dn (kτ) X n (kτ) 2 represents the error and W n represent a n x n weighing matrix. Diego Felipe Paez Granados, Breno A. Yamamoto, Hiroko Kamide, Jun Kinugawa, and Kazuhiro Kosuge, Dance Teaching by a Robot: Combining Cognitive and Physical Human Robot Interaction for Supporting the Skill Learning Process, IEEE Robotics and Automation Letters, Voo.2, pp , 2017


61 Skill Assessment of Dance Skill assessment is carried out based on score zones. Current stage is assumed proportional to practices count: Generous scoring for novice dancers. Severe scoring for experienced dancers. Diego Felipe Paez Granados, Breno A. Yamamoto, Hiroko Kamide, Jun Kinugawa, and Kazuhiro Kosuge, Dance Teaching by a Robot: Combining Cognitive and Physical Human Robot Interaction for Supporting the Skill Learning Process, IEEE Robotics and Automation Letters, Voo.2, pp , 2017
62 Progressive Teaching The progressive teaching (PT) methodology is proposed based on Piagets theory of cognitive development states. Knowledge is constructed based on experiences related to mental, biological and physical stage of the development. [1] [1] L.-D. Hammond, K. Austin, and S. Orcutt, How People Learn, Stanford University, Tech. Rep., Proposed methodology: 1. Assessment of the skill based on the current stage of physical development. 2. Feedback of the assessed skill performance for enhancing skill model formation. 3. Physical feedback based on skill performance. Diego Felipe Paez Granados, Breno A. Yamamoto, Hiroko Kamide, Jun Kinugawa, and Kazuhiro Kosuge, Dance Teaching by a Robot: Combining Cognitive and Physical Human Robot Interaction for Supporting the Skill Learning Process, IEEE Robotics and Automation Letters, Voo.2, pp , 2017

63 Progressive Teaching Combining cognitive and physical interaction for enhancing the skill learning. Diego Felipe Paez Granados, Breno A. Yamamoto, Hiroko Kamide, Jun Kinugawa, and Kazuhiro Kosuge, Dance Teaching by a Robot: Combining Cognitive and Physical Human Robot Interaction for Supporting the Skill Learning Process, IEEE Robotics and Automation Letters, Voo.2, pp , 2017




64 Progressive Teaching The robot gives feedback of the current state through CPS in color scales. Knowledge Performance Novice Expert Diego Felipe Paez Granados, Breno A. Yamamoto, Hiroko Kamide, Jun Kinugawa, and Kazuhiro Kosuge, Dance Teaching by a Robot: Combining Cognitive and Physical Human Robot Interaction for Supporting the Skill Learning Process, IEEE Robotics and Automation Letters, Voo.2, pp , 2017
65 Diego Felipe Paez Granados, Breno A. Yamamoto, Hiroko Kamide, Jun Kinugawa, and Kazuhiro Kosuge, Dance Teaching by a Robot: Combining Cognitive and Physical Human Robot Interaction for Supporting the Skill Learning Process, IEEE Robotics and Automation Letters, Voo.2, pp , 2017 Progressive Teaching The progressive teaching (PT) methodology is proposed based on Piagets theory of cognitive development states. Knowledge is constructed based on experiences related to mental, biological and physical stage of the development. [1] [1] L.-D. Hammond, K. Austin, and S. Orcutt, How People Learn, Stanford University, Tech. Rep., Proposed methodology: 1. Assessment of the skill based on the current stage of physical development. 2. Feedback of the assessed skill performance for enhancing skill model formation. 3. Physical feedback based on skill performance.
66 Adaptive Interaction Control Low-level controller model Robot Impedance Human Partner K f F d F i F r K h K d M d M h. X d. X c D h X c = X d + M d 1 ( K d X d X K f F d F i ) K d Damping Gain K f Interaction ForceError gain F i Estimated Interation Force M d Desired Impedance Inertial Matrix K h Human Stifness D h Human Damping Modifying the robot s impedance, so that, for low CPS values would produce higher damping and guidance force and high CPS would decrease both damping and force. Diego Felipe Paez Granados, Breno A. Yamamoto, Hiroko Kamide, Jun Kinugawa, and Kazuhiro Kosuge, Dance Teaching by a Robot: Combining Cognitive and Physical Human Robot Interaction for Supporting the Skill Learning Process, IEEE Robotics and Automation Letters, Voo.2, pp , 2017

67 Adaptive Interaction Control Enhancing the perceived safety and trust in the robot during interactions through the usage of a limiting interaction force. For beginners level the maximum f d has been settled to 60 N. Diego Felipe Paez Granados, Breno A. Yamamoto, Hiroko Kamide, Jun Kinugawa, and Kazuhiro Kosuge, Dance Teaching by a Robot: Combining Cognitive and Physical Human Robot Interaction for Supporting the Skill Learning Process, IEEE Robotics and Automation Letters, Voo.2, pp , 2017
 and 6 users with the proposed adaptive PT controller. 50% female and 50% male.")
68 Evaluation of Progressive Teaching User-based Configurations: 12 Users: 6 Constant Dynamics (non-adaptive impedance control) and 6 users with the proposed adaptive PT controller. 50% female and 50% male. 6 types of dance figures:
![Evaluation of Progressive Teaching Subjective evaluation [1] among trainings: 12 subjects Significant difference at the p <.](/docs-images/79/79289110/images/69-1.jpg "01level for the two training conditions was found for Comfort, Peace of mind, and Performance factors. CPS: Cumulative Performance Score [1] Kamide, H., Kawabe, K., Shigemi, S., & Arai, T. (2015).")
69 Evaluation of Progressive Teaching Subjective evaluation [1] among trainings: 12 subjects Significant difference at the p <.01level for the two training conditions was found for Comfort, Peace of mind, and Performance factors. CPS: Cumulative Performance Score [1] Kamide, H., Kawabe, K., Shigemi, S., & Arai, T. (2015). Anshin as a concept of subjective well-being between humans and robots in Japan. Advanced Robotics, 29(24),
70 RoboDANTE (Robot DANce TEacher)

71 RoboDANTE (Robot DANce TEacher)
72 Outline Challenges and Opportunities of Robotics Overview of Robotics (by JST in 2009) Examples of Physical Human-Robot Interaction Dance Partner Robots MS DanceR and PBDR RoboDANTE PaDY PaDY in a factory Conclusions

73 Automobile Factories Welding Process Industrial robots have played important roles in manufacturing industries, especially in automobile factories.

74 Automobile Factories Assembly Process There are many non-automated processes. Industrial robots are not suitable for tasks that require dexterous human skills, tasks in unstructured environment, etc.

75 Automobile Assembly Line A sequence of the tasks, necessary parts/tools for each task, and when and where each task is performed are scheduled a priori for each type of the car produced. During the work, the worker needs to return to a work bench with parts and tools several times to pick up necessary parts/tools.
,[ 日本機械学会論文集,C 編,77(783),(2011),4204-4217] [2] J. Kinugawa, Y. Kawaai, Y. Sugahara and K.")
76 Automobile Assembly Line If a robot could provide the worker with necessary parts and tools when he/she needs them, the worker could concentrate on the assembly tasks. [1] 衣川潤, 川合雄太, 菅原雄介, 小菅一弘, 組立作業支援パートナロボット PaDY( 第 1 報, コンセプトモデルの開発とその制御 ),[ 日本機械学会論文集,C 編,77(783),(2011), ] [2] J. Kinugawa, Y. Kawaai, Y. Sugahara and K. Kosuge, PaDY : Human-Friendly/Cooperative Working Support Robot for Production Site, [The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems Proceedings,(2010), ].
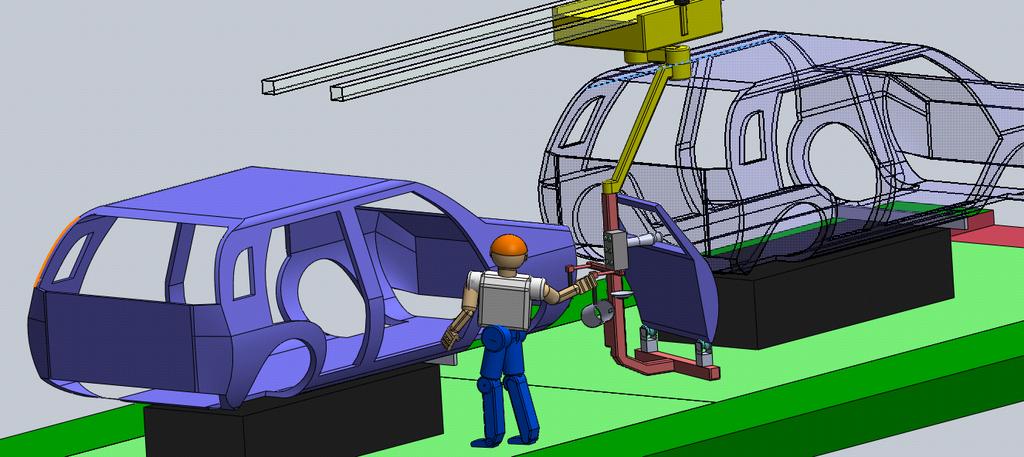
77 Co-worker Robot PaDY PaDY is a robot which delivers necessary parts and tools to a worker when he/she needs them. to reduce the worker s load to improve efficiency of the work to prevent mistakes of the work etc. PaDY [1] 衣川潤, 川合雄太, 菅原雄介, 小菅一弘, 組立作業支援パートナロボット PaDY( 第 1 報, コンセプトモデルの開発とその制御 ),[ 日本機械学会論文集,C 編,77(783),(2011), ] [2] J. Kinugawa, Y. Kawaai, Y. Sugahara and K. Kosuge, PaDY : Human- Friendly/Cooperative Working Support Robot for Production Site, [The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems Proceedings,(2010), ]. in-time Parts/tools Delivery to You robot
78 Co-worker Robot PaDY In order to deliver parts/tools to a place, where the worker needs them, when the worker needs them without disturbing the worker s work, the robot needs to know the task, its user s intention, and how the user want to be assisted in-time Parts/tools Delivery to You robot
79 The First Prototype of PaDY (P1) Size:(W)1370 (D)590 (H)1035[mm] Link Mechanism :Horizontal Articulated Robot Maximum Reach:2.0 [m](1 st Link Length:1168[mm], 2 nd Link Length:982[mm]) Weight of Working Parts:11.5[kg] Maximum Load:3 [kg] Range of Movement: 1 st Joint: 200[deg], 2 nd Joint: 360[deg] Actuator:1 st Joint & 2 nd Joint:DC Servo Motor 80[W], 3 rd Joint: DC Servo Motor 15[W]

80 Evaluation Experiment +:LRF1 :LRF2 Measured data The worker s motion necessary for picking parts/tools has been reduced. The worker could finish his tasks earlier than the work schedule. Effect of PaDY Estimated result
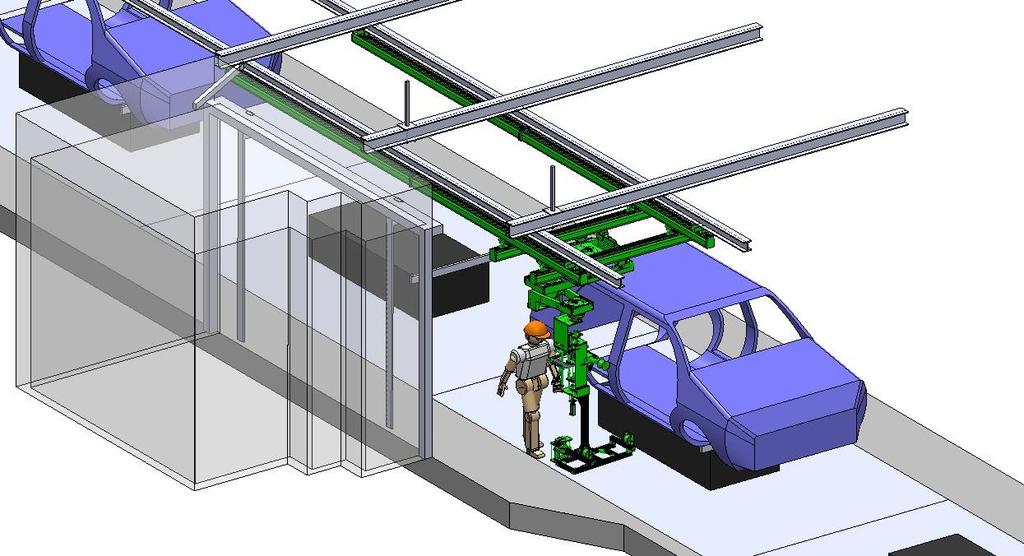
81 Factory Installation


82 1.2 m Improved Worker s Behavior Estimation PaDY Vehicle Body Task1 2 Task2 3 Task m Start Goal X LRF LRF Y LRF X PaDY LRF Y PaDY PaDY A subject is requested to do three tasks. After the three tasks were finished, the probabilistic model is updated. Jun Kinugawa, Akira Kanazawa, Shogo Arai, and Kazuhiro Kosuge, Adaptive Task Scheduling for an Assembly Task Coworker Robot Based on Incremental Learning of Human s Motion Patterns, IEEE Robotics and Automation letters, Vol. 2, No. 2, pp , 2017
 Variance of Estimated Trajectory Task1 Estimated Trajetory Task2")


83 Improved Worker s Behavior Estimation Ordinary Motion (10 th trial by Subject A) Variance of Estimated Trajectory Task1 Estimated Trajetory Task2 Observed Workers Position Task3 Start and Goal Position Jun Kinugawa, Akira Kanazawa, Shogo Arai, and Kazuhiro Kosuge, Adaptive Task Scheduling for an Assembly Task Coworker Robot Based on Incremental Learning of Human s Motion Patterns, IEEE Robotics and Automation letters, Vol. 2, No. 2, pp , 2017 PaDY


84 Improved Worker s Behavior Estimation trial 1 (without estimation) trial 10 (with estimation) Start Task1 Task1 Task2 Comparison of the work by subject B Jun Kinugawa, Akira Kanazawa, Shogo Arai, and Kazuhiro Kosuge, Adaptive Task Scheduling for an Assembly Task Coworker Robot Based on Incremental Learning of Human s Motion Patterns, IEEE Robotics and Automation letters, Vol. 2, No. 2, pp , 2017



85 Subject C, Irregular 1 Improved Worker s Behavior Estimation Subject B, Irregular 3




86 Improved Worker s Behavior Estimation Subject D, Irregular 3 Subject E, Irregular 1

87 B-PaDY

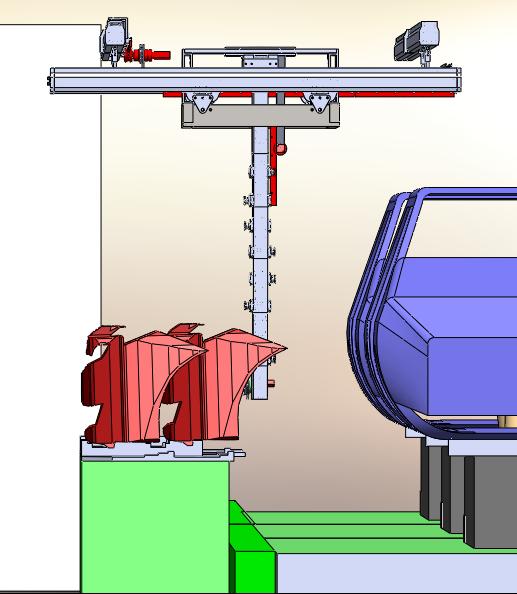
88 B-PaDY

89 B-PaDY

90 B-PaDY

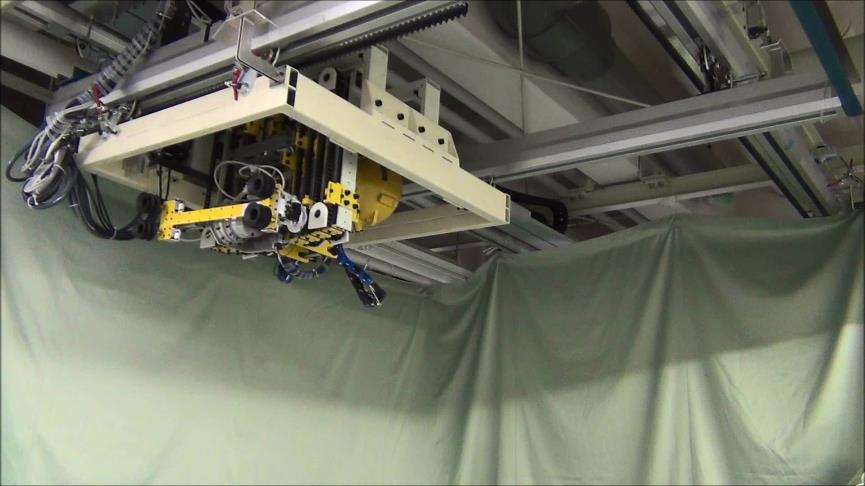
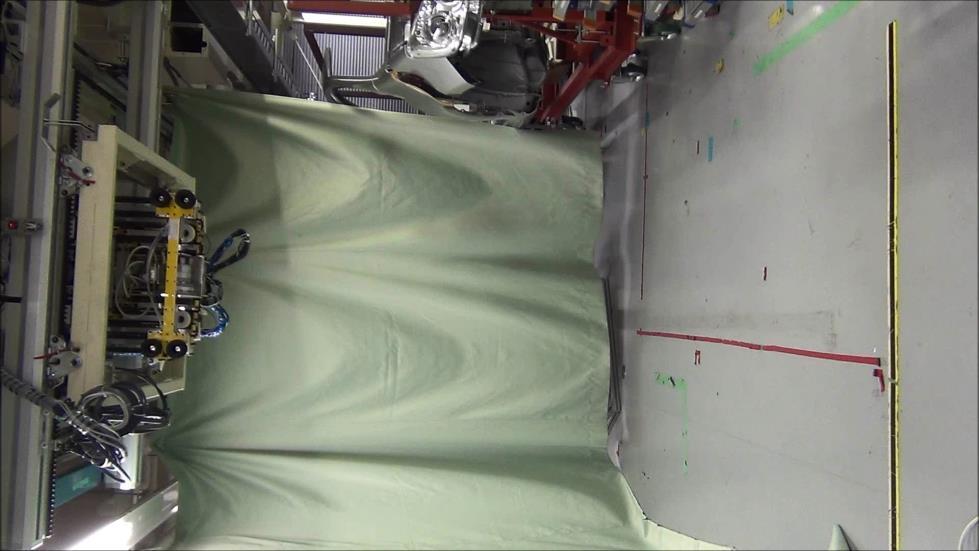
91 D-PaDY
92 D-PaDY
93 D-PaDY D-PaDY

94 D-PaDY 94
95 Conclusions Overview of Robotics has been introduced. Dance Partner Robots, PBDR and RoboDANTE have been introduced as research platforms for phri (Physical Human-Robot Interaction). The platforms have given us opportunities to reconsider issues relating to phri. PaDY has been introduced as examples of applications of phri. HRI will open new applications in many manufacturing processes.
96 Robotics Research Unit Technologies Technical Issues Required Services New Services Domain 1 Elderly Care Domain Design 2a service/services Domain 3 necessary Applications/Services Agriculture Medicine for the application as a sustainable business. Develop new fundamentals necessary for the service/services. Service/Applicationoriented Robotics Enhance Robotics unit technologies to meet Foundations the requirements for the service/services. Current Robot Function Robotics Foundations Enrich robotics foundations through application-oriented research CRDS, JST, 2009, Modified by Kosuge, August, 2011
A Co-worker Robot PaDY" for Automobile Assembly Line
 A Co-worker Robot PaDY" for Automobile Assembly Line Kazuhiro Kosuge Department of Bioengineering and Robotics Graduate School of Engineering Tohoku University Sendai 980-8579, JAPAN http://www.irs.mech.tohoku.ac.jp
A Co-worker Robot PaDY" for Automobile Assembly Line Kazuhiro Kosuge Department of Bioengineering and Robotics Graduate School of Engineering Tohoku University Sendai 980-8579, JAPAN http://www.irs.mech.tohoku.ac.jp
HMM-based Error Recovery of Dance Step Selection for Dance Partner Robot
 27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 ThA4.3 HMM-based Error Recovery of Dance Step Selection for Dance Partner Robot Takahiro Takeda, Yasuhisa Hirata,
27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 ThA4.3 HMM-based Error Recovery of Dance Step Selection for Dance Partner Robot Takahiro Takeda, Yasuhisa Hirata,
IN MOST human robot coordination systems that have
 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 54, NO. 2, APRIL 2007 699 Dance Step Estimation Method Based on HMM for Dance Partner Robot Takahiro Takeda, Student Member, IEEE, Yasuhisa Hirata, Member,
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 54, NO. 2, APRIL 2007 699 Dance Step Estimation Method Based on HMM for Dance Partner Robot Takahiro Takeda, Student Member, IEEE, Yasuhisa Hirata, Member,
製品系列統合化設計とそのタスク構造 日本機械学会論文集 C 編. 65(629) P.416-P
 P.416-P") Title 製品系列統合化設計とそのタスク構造 uthor(s) 藤田, 喜久雄 ; 石井, 浩介 Citation 日本機械学会論文集 C 編. 65(629) P.416-P.423 Issue Date 1999-01 Text Version publisher URL http://hdl.handle.net/11094/3391 DOI rights (C ) 65 629 (1999-1)
Title 製品系列統合化設計とそのタスク構造 uthor(s) 藤田, 喜久雄 ; 石井, 浩介 Citation 日本機械学会論文集 C 編. 65(629) P.416-P.423 Issue Date 1999-01 Text Version publisher URL http://hdl.handle.net/11094/3391 DOI rights (C ) 65 629 (1999-1)
ジェスチャ併用型 Voice-to-MIDI システムの提案 第五回知識創造支援システムシンポジウム報告書 : 本著作物の著作権は著者に帰属します
 JAIST Reposi https://dspace.j Title ジェスチャ併用型 Voice-to-MIDI システムの提案 Author(s) 伊藤, 直樹 ; 西本, 一志 Citation 第五回知識創造支援システムシンポジウム報告書 : 167-172 Issue Date 2008-03-14 Type Conference Paper Text version author URL
JAIST Reposi https://dspace.j Title ジェスチャ併用型 Voice-to-MIDI システムの提案 Author(s) 伊藤, 直樹 ; 西本, 一志 Citation 第五回知識創造支援システムシンポジウム報告書 : 167-172 Issue Date 2008-03-14 Type Conference Paper Text version author URL
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Birth of An Intelligent Humanoid Robot in Singapore
 Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
[1] 大橋和也, 森拓哉, 古関隆章 運転整理時における乗車率に応じた旅客行動の変化のモデル化 電気学会論文誌 D,J-Rail 2013 特集,2015,pp
![[1] 大橋和也, 森拓哉, 古関隆章 運転整理時における乗車率に応じた旅客行動の変化のモデル化 電気学会論文誌 D,J-Rail 2013 特集,2015,pp](/thumbs/94/119006158.jpg "[1] 大橋和也, 森拓哉, 古関隆章 運転整理時における乗車率に応じた旅客行動の変化のモデル化 電気学会論文誌 D,J-Rail 2013 特集,2015,pp") 5. 発表論文 / 著作物 5.1 列車の運転整理 [1] 大橋和也, 森拓哉, 古関隆章 運転整理時における乗車率に応じた旅客行動の変化のモデル化 電気学会論文誌 D,J-Rail 2013 特集,2015,pp438-443 24 [2] 森拓哉, 渡邉翔一郎, 古関隆章 混合整数計画法による全列車各駅停車の路線に快速列車を取り入れることによる旅客総旅行時間最小化 NU-Rail,2015 5.2
5. 発表論文 / 著作物 5.1 列車の運転整理 [1] 大橋和也, 森拓哉, 古関隆章 運転整理時における乗車率に応じた旅客行動の変化のモデル化 電気学会論文誌 D,J-Rail 2013 特集,2015,pp438-443 24 [2] 森拓哉, 渡邉翔一郎, 古関隆章 混合整数計画法による全列車各駅停車の路線に快速列車を取り入れることによる旅客総旅行時間最小化 NU-Rail,2015 5.2
Dr. Ashish Dutta. Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA
 Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA
 HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Nagoya University Center of Innovation (COI)
") The 18th International Conference on Industrial Technology Innovation (ICITI, 2017) Nagoya University Center of Innovation (COI) -Empowering an aging society through advanced mobility- August 22, 2017
The 18th International Conference on Industrial Technology Innovation (ICITI, 2017) Nagoya University Center of Innovation (COI) -Empowering an aging society through advanced mobility- August 22, 2017
Design and Control of the BUAA Four-Fingered Hand
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Laser-Assisted Telerobotic Control for Enhancing Manipulation Capabilities of Persons with Disabilities
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Laser-Assisted Telerobotic Control for Enhancing Manipulation Capabilities of Persons with
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Laser-Assisted Telerobotic Control for Enhancing Manipulation Capabilities of Persons with
Robotics Evolution: From Production Rate to Human Productivity
 Chetan Kapoor Senior Director of Technology Innovation Yaskawa America, Motoman Robotics Division Robotics Evolution: From Production Rate to Human Productivity 2016 YASKAWA America, Inc. YASKAWA.COM 100
Chetan Kapoor Senior Director of Technology Innovation Yaskawa America, Motoman Robotics Division Robotics Evolution: From Production Rate to Human Productivity 2016 YASKAWA America, Inc. YASKAWA.COM 100
4R and 5R Parallel Mechanism Mobile Robots
 4R and 5R Parallel Mechanism Mobile Robots Tasuku Yamawaki Department of Mechano-Micro Engineering Tokyo Institute of Technology 4259 Nagatsuta, Midoriku Yokohama, Kanagawa, Japan Email: d03yamawaki@pms.titech.ac.jp
4R and 5R Parallel Mechanism Mobile Robots Tasuku Yamawaki Department of Mechano-Micro Engineering Tokyo Institute of Technology 4259 Nagatsuta, Midoriku Yokohama, Kanagawa, Japan Email: d03yamawaki@pms.titech.ac.jp
On Observer-based Passive Robust Impedance Control of a Robot Manipulator
 Journal of Mechanics Engineering and Automation 7 (2017) 71-78 doi: 10.17265/2159-5275/2017.02.003 D DAVID PUBLISHING On Observer-based Passive Robust Impedance Control of a Robot Manipulator CAO Sheng,
Journal of Mechanics Engineering and Automation 7 (2017) 71-78 doi: 10.17265/2159-5275/2017.02.003 D DAVID PUBLISHING On Observer-based Passive Robust Impedance Control of a Robot Manipulator CAO Sheng,
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Ensuring the Safety of an Autonomous Robot in Interaction with Children
 Machine Learning in Robot Assisted Therapy Ensuring the Safety of an Autonomous Robot in Interaction with Children Challenges and Considerations Stefan Walke stefan.walke@tum.de SS 2018 Overview Physical
Machine Learning in Robot Assisted Therapy Ensuring the Safety of an Autonomous Robot in Interaction with Children Challenges and Considerations Stefan Walke stefan.walke@tum.de SS 2018 Overview Physical
Human-like Assembly Robots in Factories
 5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
A NEW ROBOTIC MANIPULATOR IN CONSTRUCTION BASED ON MAN-ROBOT COOPERATION WORK
 239 A NEW ROBOTIC MANIPULATOR IN CONSTRUCTION BASED ON MAN-ROBOT COOPERATION WORK Toshio Fukuda, Yoshio Fujisawa, Fumihito Arai Dept. of Mechanical Engineering, Nagoya University Furo-chyo, Chikusa-ku
239 A NEW ROBOTIC MANIPULATOR IN CONSTRUCTION BASED ON MAN-ROBOT COOPERATION WORK Toshio Fukuda, Yoshio Fujisawa, Fumihito Arai Dept. of Mechanical Engineering, Nagoya University Furo-chyo, Chikusa-ku
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
LASER ASSISTED COMBINED TELEOPERATION AND AUTONOMOUS CONTROL
 ANS EPRRSD - 13 th Robotics & remote Systems for Hazardous Environments 11 th Emergency Preparedness & Response Knoxville, TN, August 7-10, 2011, on CD-ROM, American Nuclear Society, LaGrange Park, IL
ANS EPRRSD - 13 th Robotics & remote Systems for Hazardous Environments 11 th Emergency Preparedness & Response Knoxville, TN, August 7-10, 2011, on CD-ROM, American Nuclear Society, LaGrange Park, IL
Available theses (October 2011) MERLIN Group
 MERLIN Group") Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
23 May 2018, Galveson, TX Science of Team Science 2018 Conference Ge WANG 1,3 and Ken-ichi SATO 2,3
 A HATENATHON Approach Report on Promoting SciTS in Japan 23 May 2018, Galveson, TX Science of Team Science 2018 Conference Ge WANG 1,3 and Ken-ichi SATO 2,3 1 Research Institute of Science and Technology
A HATENATHON Approach Report on Promoting SciTS in Japan 23 May 2018, Galveson, TX Science of Team Science 2018 Conference Ge WANG 1,3 and Ken-ichi SATO 2,3 1 Research Institute of Science and Technology
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball
 Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Self-learning Assistive Exoskeleton with Sliding Mode Admittance Control
 213 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 213. Tokyo, Japan Self-learning Assistive Exoskeleton with Sliding Mode Admittance Control Tzu-Hao Huang, Ching-An
213 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 213. Tokyo, Japan Self-learning Assistive Exoskeleton with Sliding Mode Admittance Control Tzu-Hao Huang, Ching-An
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
Service Research and Innovation in Japan
 Service Research and Innovation in Japan Kazuyoshi Hidaka Professor of Graduate School of Innovation Management Tokyo Institute of Technology Chair of SRII Japan Chapter K.HIDAKA@TOKYO TECH 1 We live in
Service Research and Innovation in Japan Kazuyoshi Hidaka Professor of Graduate School of Innovation Management Tokyo Institute of Technology Chair of SRII Japan Chapter K.HIDAKA@TOKYO TECH 1 We live in
Man-Machine Synergy Effector
 Man-Machine Synergy Effector Anthropomorphic Robotic Tools based on Hybrid Approaches Dr. KANAOKA Katsuya Man-Machine Synergy Effectors Inc. & Advanced Robotics Research Center @ Ritsumeikan Univ. Imagine
Man-Machine Synergy Effector Anthropomorphic Robotic Tools based on Hybrid Approaches Dr. KANAOKA Katsuya Man-Machine Synergy Effectors Inc. & Advanced Robotics Research Center @ Ritsumeikan Univ. Imagine
Robots Learning from Robots: A proof of Concept Study for Co-Manipulation Tasks. Luka Peternel and Arash Ajoudani Presented by Halishia Chugani
 Robots Learning from Robots: A proof of Concept Study for Co-Manipulation Tasks Luka Peternel and Arash Ajoudani Presented by Halishia Chugani Robots learning from humans 1. Robots learn from humans 2.
Robots Learning from Robots: A proof of Concept Study for Co-Manipulation Tasks Luka Peternel and Arash Ajoudani Presented by Halishia Chugani Robots learning from humans 1. Robots learn from humans 2.
Impacts and Risks Caused by AI Networking, and Future Challenges
 Impacts and Risks Caused by AI Networking, and Future Challenges (From Studies on AI Networking in Japan) November 17, 2016 Tatsuya KUROSAKA Project Assistant Professor at Keio University Graduate School
Impacts and Risks Caused by AI Networking, and Future Challenges (From Studies on AI Networking in Japan) November 17, 2016 Tatsuya KUROSAKA Project Assistant Professor at Keio University Graduate School
INDUSTRY 4.0. Modern massive Data Analysis for Industry 4.0 Industry 4.0 at VŠB-TUO
 INDUSTRY 4.0 Modern massive Data Analysis for Industry 4.0 Industry 4.0 at VŠB-TUO Václav Snášel Faculty of Electrical Engineering and Computer Science VŠB-TUO Czech Republic AGENDA 1. Industry 4.0 2.
INDUSTRY 4.0 Modern massive Data Analysis for Industry 4.0 Industry 4.0 at VŠB-TUO Václav Snášel Faculty of Electrical Engineering and Computer Science VŠB-TUO Czech Republic AGENDA 1. Industry 4.0 2.
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Cognitive Systems and Robotics: opportunities in FP7
 Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Robotics for Children
 Vol. xx No. xx, pp.1 8, 200x 1 1 2 3 4 Robotics for Children New Directions in Child Education and Therapy Fumihide Tanaka 1,HidekiKozima 2, Shoji Itakura 3 and Kazuo Hiraki 4 Robotics intersects with
Vol. xx No. xx, pp.1 8, 200x 1 1 2 3 4 Robotics for Children New Directions in Child Education and Therapy Fumihide Tanaka 1,HidekiKozima 2, Shoji Itakura 3 and Kazuo Hiraki 4 Robotics intersects with
A robot which operates semi- or fully autonomously to perform services useful to the well-being of humans
 Sponsor: A robot which operates semi- or fully autonomously to perform services useful to the well-being of humans Service robots cater to the general public, in a variety of indoor settings, from the
Sponsor: A robot which operates semi- or fully autonomously to perform services useful to the well-being of humans Service robots cater to the general public, in a variety of indoor settings, from the
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
(Osaka Industrial Technology - Platform)
") Challenge of Industry-University Cooperation of OIT 大阪工業大学による地域産学連携の試み (Osaka Industrial Technology - Platform) Osaka Institute of Technology Vice President Masatoshi KOTERA Four faculties in three Campuses
Challenge of Industry-University Cooperation of OIT 大阪工業大学による地域産学連携の試み (Osaka Industrial Technology - Platform) Osaka Institute of Technology Vice President Masatoshi KOTERA Four faculties in three Campuses
Robotics: Applications
 Lecture 01 Feb. 04, 2019 Robotics: Applications Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi Outline Introduction Industrial applications Other applications Summary Introduction 90% robots in factories:
Lecture 01 Feb. 04, 2019 Robotics: Applications Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi Outline Introduction Industrial applications Other applications Summary Introduction 90% robots in factories:
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
Multi-bit Sigma-Delta TDC Architecture for Digital Signal Timing Measurement
 IEEE International ixed-signals, Sensors, and Systems Test Workshop, Taipei, 22 ulti-bit Sigma-Delta TDC Architecture for Digital Signal Timing easurement S. emori,. Ishii, H. Kobayashi, O. Kobayashi T.
IEEE International ixed-signals, Sensors, and Systems Test Workshop, Taipei, 22 ulti-bit Sigma-Delta TDC Architecture for Digital Signal Timing easurement S. emori,. Ishii, H. Kobayashi, O. Kobayashi T.
What is a robot. Robots (seen as artificial beings) appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW
 appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW") ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
Summary of the meeting with Professor Stewart Freeman
 Summary of the meeting with Professor Stewart Freeman 1. Personal profile (1) Name Dr. Stewart P.H.T. Freeman (2) Affiliation Professorial Research Fellow, University of Glasgow & Head of Facility, Accelerator
Summary of the meeting with Professor Stewart Freeman 1. Personal profile (1) Name Dr. Stewart P.H.T. Freeman (2) Affiliation Professorial Research Fellow, University of Glasgow & Head of Facility, Accelerator
Introduction to Robotics
 Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012
 July 25 th, 2012") Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
情Propagation Characteristics of 700MHz Band V2X Wireless Communication*
 DENSO TECHNCAL REVEW Vol.21 2016 情Propagation Characteristics of 700Hz Band V2X Wireless Communication* Yasumune YUKZAK Yuji SUGOTO Tadao SUZUK n recent years, vehicle to vehicle and vehicle to infrastructure
DENSO TECHNCAL REVEW Vol.21 2016 情Propagation Characteristics of 700Hz Band V2X Wireless Communication* Yasumune YUKZAK Yuji SUGOTO Tadao SUZUK n recent years, vehicle to vehicle and vehicle to infrastructure
Magellan Systems Japan, Inc.
 Magellan Systems Japan, Inc. MSJ Company Overview and Tech Information. EU-JPN GNSS Week, 2017 Revision 2.0 Company Profile Profile (Company Profile) Our Location:7-1-3, Doicho, Amagasaki, Hyogo, 660-0083,
Magellan Systems Japan, Inc. MSJ Company Overview and Tech Information. EU-JPN GNSS Week, 2017 Revision 2.0 Company Profile Profile (Company Profile) Our Location:7-1-3, Doicho, Amagasaki, Hyogo, 660-0083,
Automation and Mechatronics Engineering Program. Your Path Towards Success
 Automation and Mechatronics Engineering Program Your Path Towards Success What is Mechatronics? Mechatronics combines the principles of mechanical, computer, electronic, and control engineering into a
Automation and Mechatronics Engineering Program Your Path Towards Success What is Mechatronics? Mechatronics combines the principles of mechanical, computer, electronic, and control engineering into a
Stabilize humanoid robot teleoperated by a RGB-D sensor
 Stabilize humanoid robot teleoperated by a RGB-D sensor Andrea Bisson, Andrea Busatto, Stefano Michieletto, and Emanuele Menegatti Intelligent Autonomous Systems Lab (IAS-Lab) Department of Information
Stabilize humanoid robot teleoperated by a RGB-D sensor Andrea Bisson, Andrea Busatto, Stefano Michieletto, and Emanuele Menegatti Intelligent Autonomous Systems Lab (IAS-Lab) Department of Information
Human Robot Interaction (HRI)
") Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Development of a telepresence agent
 Author: Chung-Chen Tsai, Yeh-Liang Hsu (2001-04-06); recommended: Yeh-Liang Hsu (2001-04-06); last updated: Yeh-Liang Hsu (2004-03-23). Note: This paper was first presented at. The revised paper was presented
Author: Chung-Chen Tsai, Yeh-Liang Hsu (2001-04-06); recommended: Yeh-Liang Hsu (2001-04-06); last updated: Yeh-Liang Hsu (2004-03-23). Note: This paper was first presented at. The revised paper was presented
Haptic Virtual Fixtures for Robot-Assisted Manipulation
 Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Summary of the Report by Study Group for Higher Quality of Life through Utilization of IoT and Other Digital Tools Introduced into Lifestyle Products
 Summary of the Report by Study Group for Higher Quality of Life through Utilization of IoT and Other Digital Tools Introduced into Lifestyle Products 1. Problem awareness As consumers sense of value and
Summary of the Report by Study Group for Higher Quality of Life through Utilization of IoT and Other Digital Tools Introduced into Lifestyle Products 1. Problem awareness As consumers sense of value and
Cognitive Robotics 2017/2018
 Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
 International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
Applied Robotics for Installations and Base Operations (ARIBO)
") Applied Robotics for Installations and Base Operations (ARIBO) Overview January, 2016 Edward Straub, DM U.S. Army TARDEC, Ground Vehicle Robotics edward.r.straub2.civ@mail.mil ARIBO Overview 1 ARIBO Strategic
Applied Robotics for Installations and Base Operations (ARIBO) Overview January, 2016 Edward Straub, DM U.S. Army TARDEC, Ground Vehicle Robotics edward.r.straub2.civ@mail.mil ARIBO Overview 1 ARIBO Strategic
Available theses (October 2012) MERLIN Group
 MERLIN Group") Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
SECOND YEAR PROJECT SUMMARY
 SECOND YEAR PROJECT SUMMARY Grant Agreement number: 215805 Project acronym: Project title: CHRIS Cooperative Human Robot Interaction Systems Period covered: from 01 March 2009 to 28 Feb 2010 Contact Details
SECOND YEAR PROJECT SUMMARY Grant Agreement number: 215805 Project acronym: Project title: CHRIS Cooperative Human Robot Interaction Systems Period covered: from 01 March 2009 to 28 Feb 2010 Contact Details
Contents. Mental Commit Robot (Mental Calming Robot) Industrial Robots. In What Way are These Robots Intelligent. Video: Mental Commit Robots
 Industrial Robots. In What Way are These Robots Intelligent. Video: Mental Commit Robots") Human Robot Interaction for Psychological Enrichment Dr. Takanori Shibata Senior Research Scientist Intelligent Systems Institute National Institute of Advanced Industrial Science and Technology (AIST)
Human Robot Interaction for Psychological Enrichment Dr. Takanori Shibata Senior Research Scientist Intelligent Systems Institute National Institute of Advanced Industrial Science and Technology (AIST)
Image processing of the weld pool and tracking of the welding line in pulsed MAG welding *
 [ 溶接学会論文集第 33 巻第 2 号 p. 156s-16s (215)] Image processing of the weld pool and tracking of the welding line in pulsed MAG welding * by Satoshi Yamane**, Katsuhito Shirota***, Sota Tsukano*** and Da Lu Wang***
[ 溶接学会論文集第 33 巻第 2 号 p. 156s-16s (215)] Image processing of the weld pool and tracking of the welding line in pulsed MAG welding * by Satoshi Yamane**, Katsuhito Shirota***, Sota Tsukano*** and Da Lu Wang***
Android (Child android)
") Social and ethical issue Why have I developed the android? Hiroshi ISHIGURO Department of Adaptive Machine Systems, Osaka University ATR Intelligent Robotics and Communications Laboratories JST ERATO Asada
Social and ethical issue Why have I developed the android? Hiroshi ISHIGURO Department of Adaptive Machine Systems, Osaka University ATR Intelligent Robotics and Communications Laboratories JST ERATO Asada
* Institute of Electrical and Electronics Engineers (IEEE), WORLD HAPTICS CONGRESS 2011 held in Istanbul, Turkey, in June 2011
, WORLD HAPTICS CONGRESS 2011 held in Istanbul, Turkey, in June 2011") 2011 November Shiseido Develops World s First Finger Sensor That Holds the Key to New Value Development of Cosmetic Products in Cooperation with Electronic Measurement Instrument Manufacturers Kato Tech
2011 November Shiseido Develops World s First Finger Sensor That Holds the Key to New Value Development of Cosmetic Products in Cooperation with Electronic Measurement Instrument Manufacturers Kato Tech
The seven pillars of Data Science
 2016 年度統計関連学会連合大会金沢大学 2016 年 9 月 6-9 日 The seven pillars of Data Science Hideyasu SHIMADZU Department of Mathematical Sciences and Centre for Data Science, Loughborough University, UK Big Data Google Trends
2016 年度統計関連学会連合大会金沢大学 2016 年 9 月 6-9 日 The seven pillars of Data Science Hideyasu SHIMADZU Department of Mathematical Sciences and Centre for Data Science, Loughborough University, UK Big Data Google Trends
Development of Drum CVT for a Wire-Driven Robot Hand
 The 009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 009 St. Louis, USA Development of Drum CVT for a Wire-Driven Robot Hand Kojiro Matsushita, Shinpei Shikanai, and
The 009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 009 St. Louis, USA Development of Drum CVT for a Wire-Driven Robot Hand Kojiro Matsushita, Shinpei Shikanai, and
ROBOTICS, Jump to the next generation
 ROBOTICS, Jump to the next generation Erich Lohrmann Area Director Latin America KUKA Roboter GmbH COPY RIGHTS by Erich Lohrmann Human Evolution Robotic Evolution (by KUKA) International Conference on
ROBOTICS, Jump to the next generation Erich Lohrmann Area Director Latin America KUKA Roboter GmbH COPY RIGHTS by Erich Lohrmann Human Evolution Robotic Evolution (by KUKA) International Conference on
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
Intermediate Conversation Material #10
 Intermediate Conversation Material #10 OUR AGENDA FOR TODAY At work Exercise 1: Picture Conversation A. Read the dialogue below. 次の会話を読んでみましょう Ms. Jefferson, what s our agenda for today s meeting? Our
Intermediate Conversation Material #10 OUR AGENDA FOR TODAY At work Exercise 1: Picture Conversation A. Read the dialogue below. 次の会話を読んでみましょう Ms. Jefferson, what s our agenda for today s meeting? Our
Front Digital page Strategy and Leadership
 Front Digital page Strategy and Leadership Who am I? Prof. Dr. Bob de Wit What concerns me? - How to best lead a firm - How to design the strategy process - How to best govern a country - How to adapt
Front Digital page Strategy and Leadership Who am I? Prof. Dr. Bob de Wit What concerns me? - How to best lead a firm - How to design the strategy process - How to best govern a country - How to adapt
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Industry 4.0. Advanced and integrated SAFETY tools for tecnhical plants
 Industry 4.0 Advanced and integrated SAFETY tools for tecnhical plants Industry 4.0 Industry 4.0 is the digital transformation of manufacturing; leverages technologies, such as Big Data and Internet of
Industry 4.0 Advanced and integrated SAFETY tools for tecnhical plants Industry 4.0 Industry 4.0 is the digital transformation of manufacturing; leverages technologies, such as Big Data and Internet of
CG Image Generation of Four-Dimensional Origami 4 次元折り紙の CG 画像生成
 CG Image Generation of Four-Dimensional Origami Akira Inoue Ryouko Itohara Kuniaki Yajima Keimei Kaino Sendai National College of Technology yajima@cc.sendai-ct.ac.jp kaino@cc.sendai-ct.ac.jp Abstract
CG Image Generation of Four-Dimensional Origami Akira Inoue Ryouko Itohara Kuniaki Yajima Keimei Kaino Sendai National College of Technology yajima@cc.sendai-ct.ac.jp kaino@cc.sendai-ct.ac.jp Abstract
Chapter 1. Robot and Robotics PP
 Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts
 Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Department of Robotics Ritsumeikan University
 Department of Robotics Ritsumeikan University Shinichi Hirai Dept. Robotics Ritsumeikan Univ. Hanoi Institute of Technology Hanoi, Vietnam, Dec. 20, 2008 http://www.ritsumei.ac.jp/se/rm/robo/index-e.htm
Department of Robotics Ritsumeikan University Shinichi Hirai Dept. Robotics Ritsumeikan Univ. Hanoi Institute of Technology Hanoi, Vietnam, Dec. 20, 2008 http://www.ritsumei.ac.jp/se/rm/robo/index-e.htm
Proactive Behavior of a Humanoid Robot in a Haptic Transportation Task with a Human Partner
 Proactive Behavior of a Humanoid Robot in a Haptic Transportation Task with a Human Partner Antoine Bussy 1 Pierre Gergondet 1,2 Abderrahmane Kheddar 1,2 François Keith 1 André Crosnier 1 Abstract In this
Proactive Behavior of a Humanoid Robot in a Haptic Transportation Task with a Human Partner Antoine Bussy 1 Pierre Gergondet 1,2 Abderrahmane Kheddar 1,2 François Keith 1 André Crosnier 1 Abstract In this
System of Recognizing Human Action by Mining in Time-Series Motion Logs and Applications
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan System of Recognizing Human Action by Mining in Time-Series Motion Logs and Applications
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan System of Recognizing Human Action by Mining in Time-Series Motion Logs and Applications
Overview Agents, environments, typical components
 Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
ENHANCED HUMAN-AGENT INTERACTION: AUGMENTING INTERACTION MODELS WITH EMBODIED AGENTS BY SERAFIN BENTO. MASTER OF SCIENCE in INFORMATION SYSTEMS
 BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
Cooperative Transportation by Humanoid Robots Learning to Correct Positioning
 Cooperative Transportation by Humanoid Robots Learning to Correct Positioning Yutaka Inoue, Takahiro Tohge, Hitoshi Iba Department of Frontier Informatics, Graduate School of Frontier Sciences, The University
Cooperative Transportation by Humanoid Robots Learning to Correct Positioning Yutaka Inoue, Takahiro Tohge, Hitoshi Iba Department of Frontier Informatics, Graduate School of Frontier Sciences, The University
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Digitizing European Industry
 Digitizing European Industry Bern 31.10.2017 Cornelia Spycher, National Contact Point (NCP) for Nanotechnologies, Advanced Materials & Manufacturing & Processing (NMBP) Cornelia.Spycher@euresearch.ch +41
Digitizing European Industry Bern 31.10.2017 Cornelia Spycher, National Contact Point (NCP) for Nanotechnologies, Advanced Materials & Manufacturing & Processing (NMBP) Cornelia.Spycher@euresearch.ch +41
Performance Issues in Collaborative Haptic Training
 27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 FrA4.4 Performance Issues in Collaborative Haptic Training Behzad Khademian and Keyvan Hashtrudi-Zaad Abstract This
27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 FrA4.4 Performance Issues in Collaborative Haptic Training Behzad Khademian and Keyvan Hashtrudi-Zaad Abstract This
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
Digitalisation as day-to-day-business
 Digitalisation as day-to-day-business What is today feasible for the company in the future Prof. Jivka Ovtcharova INSTITUTE FOR INFORMATION MANAGEMENT IN ENGINEERING Baden-Württemberg Driving force for
Digitalisation as day-to-day-business What is today feasible for the company in the future Prof. Jivka Ovtcharova INSTITUTE FOR INFORMATION MANAGEMENT IN ENGINEERING Baden-Württemberg Driving force for
Ubiquitous Network Robots for Life Support
 DAY 2: EXPERTS WORKSHOP Active and Healthy Ageing: Research and Innovation Responses from Europe and Japan Success Stories in ICT/Information Society Research for Active and Healthy Ageing Ubiquitous Network
DAY 2: EXPERTS WORKSHOP Active and Healthy Ageing: Research and Innovation Responses from Europe and Japan Success Stories in ICT/Information Society Research for Active and Healthy Ageing Ubiquitous Network
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping
 Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS