Improving Emergency Response and Human- Robotic Performance
|
|
|
- Clarissa Fletcher
- 6 years ago
- Views:
Transcription



1 Improving Emergency Response and Human- Robotic Performance 8 th David Gertman, David J. Bruemmer, and R. Scott Hartley Idaho National Laboratory th Annual IEEE Conference on Human Factors and Power Plants Joint with Human Performance and Root Cause Trending (HPRCT) August 26-31st 2007 Monterey California
2 Overview Emergency response is a critical part of preparedness for chemical, biological, radiological, and nuclear (CBRN) incidents at nuclear power plants (NPPs) Response can be improved through collaborative use of new robotic capabilities Gains include reduced operator exposure, workload, and stress and improved mapping. New robotic response capabilities include casualty identification and mapping of radiation levels, interior walls, major landmarks, and obstacles Robotic advances include simplified tasking and control, incorporation of response-oriented behaviors, mapping and localization, data fusion, sensor abstraction, reduced communications, and reduced manpower requirements
 NRC requires plants to conduct training drill during alternate years The extent to which robots are")
3 Background Emergency response is covered by the US NRC Federal Radiological Emergency Response Plan (FRERP) (1996) Any peacetime radiological emergency Authority for response is detailed in Executive Order US NPPs participate in reviewed emergency exercises every two years (source NEI 2007) NRC requires plants to conduct training drill during alternate years The extent to which robots are deployed is decided on a local level. We want to support the decision making process We want to design- build- test single and multi-robotic collaborative behaviors to be used to aid rapid exploration and event characterization
4 Our Philosophy Regarding Robot-Human Collaboration How much autonomy is best? We believe in mixed initiative control as the logical answer to this question, especially where the operator s view of the robot world is constrained We pursue the answer combining 3-D visualization, improved sensor capability, enhanced robot initiative and intelligence including spatial reasoning, and improved metaphors for control At the end of the day, the answer is context and user specific

5 Determine User Issues Seek input from responders such as explosive ordinance disposal (EOD) technicians and weapons of mass destruction (WMD) civil response teams (CST) for dirty bomb detection Many with robot experience in-theater Responder issues: Interface design, system weight, communications drop-out, high operator work load, personnel protective gear and heat stress, need for back-up team, difficulty in mapping interiors and hazards, establishing safety boundaries
6 Develop Robot Behaviors and Controls Focus development on user issues Develop exploration, navigation, and radiation field mapping behaviors for indoors/outdoors Incorporate simultaneous localization and mapping (SLAM) Incorporate perceptual capabilities for 3D ranging and utilize for detecting and avoiding negative obstacles Incorporate radiological sensor and controls into robots Develop radiological field abstractions and indications Incorporate human presence/casualty detection behaviors

7 Design Approach to HRI INL overarching design concepts include Intelligence should reside on the robot itself Keep complexity from the user Develop next generation controller Enhance data fusion Employ end-users as designers and participants Develop communications protocols whereby robot can communicate from within shielded structures
8 Tasks and Objectives Develop and Assess Behaviors, Tools, Controls & Interface Establish performance metrics, assessment methods, and acceptance criteria for experiments. Conduct human factors experiments and review of activities Conduct Experiments verify usefulness of potential behaviors: Obstacle avoidance, guarded motion, mapping and localization, path planning, waypoint navigation.
9 Design Experiment, Metrics, and Assessment Methods Experiment Training delivered on-site Independent variables experience, level of robot autonomy Three modes of robot control (all have video feed) Joystick, Joystick with Map, Target Mode with Map Counterbalancing Facility configuration, source placement, order of display conditions Metrics Robot initiative - Localization accuracy Time to localize sources - Distance traveled Situational awareness - Workload Debriefs - Preference


10 Dirty Bomb Experiment (July 07) Building 613 irobot Packbot Radiation Detector INL Critical Infrastructure Test Range Complex

11 Critical Infrastructure Test Range Complex

12 PER-613 Experimental Facility
13 Dirty Bomb Experiment Objectives Responding to the needs of EOD and CSTs Click and go behavior to go down range and return, but allow direct human control within critical / target area Response: Provide dynamic autonomy tasking tools for navigation and manipulation. Want better situation awareness at the target area Response: Localize depth mosaics of selected entities / terrain within 3D visualization of robot and map data Currently using paper and pencil to draw map and hazards Response: Multiple threats displayed in real-time within fusion of robot-generated map and terrain data Need to know / display safe vs. unsafe zones in real-time Response: Scalable thresholding with automatic abstraction / normalization of hazard sensor data Communications is major limitation for robot use Response: Multi-modal, long range communications adapt to changing connectivity & bandwidth
14 Dirty Bomb Experiment Objectives Responding to the needs of EOD and Civil Response Teams Click and go behavior to go down range and return, but want more direct human control within critical / target area Response: Provide dynamic autonomy tasking tools for navigation and manipulation. Want better situation awareness at the target area Response: Localize depth mosaics of selected entities / terrain within 3D visualization of robot and map data Currently using paper and pencil to draw map and hazards Response: Multiple threats displayed in real-time within fusion of robot-generated map and terrain data Need to know / display safe vs. unsafe zones in real-time Response: Scalable thresholding with automatic abstraction / normalization of hazard sensor data Communications is major limitation for robot use Response: Multi-modal, long range comms. adapt to changing connectivity & bandwidth
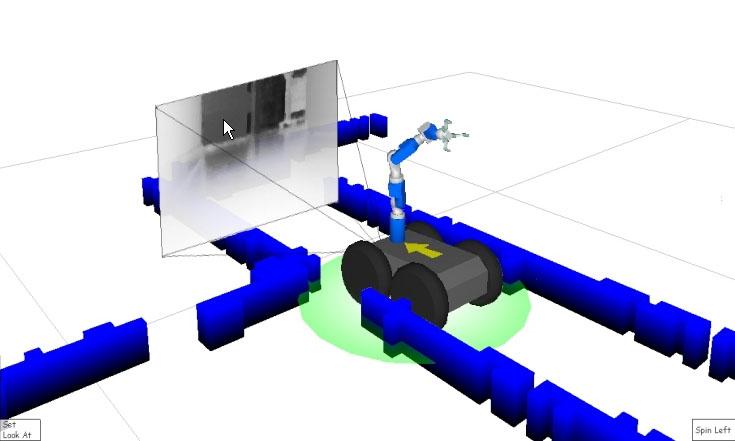
15 General visualization

16 FY-07 Source localization findings Joystick Joystick + Map Target + Map EOD % Excellent 57% 67% 100% % Fail 29% 0% 0% CST % Excellent 43% 50% 50% % Fail 43% 17% 0% NE % Excellent 50% 50% 75% % fail 25% %0% 25%
17 FY-07 Dirty bomb study findings Map Analyzation Score for End Users Score Video Only Video and Map Target Subject #
18 Conclusions Increased autonomy was associated with user preference and superior task performance Work is a work in progress, additional testing scheduled for October Employ end-users, the performance differences can be significant Efforts require a team Deploying intelligence on the robot can lead to substantial performance gains Use of robots in emergency response has the potential to reduce exposure and personnel requirements but the behaviors must be acceptable to end users
19 INL Government and Industry Collaboration Partners NASA Ames Research Center DoD Technical Support Working Group SPAWAR 101st Weapons of Mass Destruction Civil Support Team (WMD- CST) from the Idaho National Guard Joint Ground Robotics Enterprise (JGRE)Program Nuclear Regulatory Commission (NRC) Office of Nuclear Security and Incident Response Vendors: irobot, Foster-Miller, Segway, SRI University of Texas Las Vegas Law Enforcement RAJANT Corp Others: FEMA, DHS
How Training and Experience Affect the Benefits of Autonomy in a Dirty-Bomb Experiment
 INL/CON-07-13234 PREPRINT How Training and Experience Affect the Benefits of Autonomy in a Dirty-Bomb Experiment Human Robot Interaction David J. Bruemmer Curtis W. Nielsen David I. Gertman March 2008
INL/CON-07-13234 PREPRINT How Training and Experience Affect the Benefits of Autonomy in a Dirty-Bomb Experiment Human Robot Interaction David J. Bruemmer Curtis W. Nielsen David I. Gertman March 2008
Improving Emergency Response and Human- Robotic Performance
 INL/CON-07-12791 PREPRINT Improving Emergency Response and Human- Robotic Performance Joint Meeting and Conference of the Institute of Electrical and Electronics Engineers (IEEE) and Human Performance
INL/CON-07-12791 PREPRINT Improving Emergency Response and Human- Robotic Performance Joint Meeting and Conference of the Institute of Electrical and Electronics Engineers (IEEE) and Human Performance
Advancing Autonomy on Man Portable Robots. Brandon Sights SPAWAR Systems Center, San Diego May 14, 2008
 Advancing Autonomy on Man Portable Robots Brandon Sights SPAWAR Systems Center, San Diego May 14, 2008 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection
Advancing Autonomy on Man Portable Robots Brandon Sights SPAWAR Systems Center, San Diego May 14, 2008 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection
Countering Weapons of Mass Destruction (CWMD) Capability Assessment Event (CAE)
 Capability Assessment Event (CAE)") Countering Weapons of Mass Destruction (CWMD) Capability Assessment Event (CAE) Overview 08-09 May 2019 Submit NLT 22 March On 08-09 May, SOFWERX, in collaboration with United States Special Operations
Countering Weapons of Mass Destruction (CWMD) Capability Assessment Event (CAE) Overview 08-09 May 2019 Submit NLT 22 March On 08-09 May, SOFWERX, in collaboration with United States Special Operations
Explosive Ordnance Disposal/ Low-Intensity Conflict. Improvised Explosive Device Defeat
 Explosive Ordnance Disposal/ Low-Intensity Conflict Improvised Explosive Device Defeat EOD/LIC Mission The Explosive Ordnance Disposal/Low-Intensity Conflict (EOD/LIC) program provides Joint Service EOD
Explosive Ordnance Disposal/ Low-Intensity Conflict Improvised Explosive Device Defeat EOD/LIC Mission The Explosive Ordnance Disposal/Low-Intensity Conflict (EOD/LIC) program provides Joint Service EOD
ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS)
") ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS) Dr. Daniel Kent, * Dr. Thomas Galluzzo*, Dr. Paul Bosscher and William Bowman INTRODUCTION
ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS) Dr. Daniel Kent, * Dr. Thomas Galluzzo*, Dr. Paul Bosscher and William Bowman INTRODUCTION
Emerging Security Challenges Division NATO
 NATO Science for Peace and Security (SPS) Programme Workshop on CBRN Defence 22-24 October 2013 Brussels Emerging Security Challenges Division NATO 1 NATO Science for Peace and Security (SPS) Programme
NATO Science for Peace and Security (SPS) Programme Workshop on CBRN Defence 22-24 October 2013 Brussels Emerging Security Challenges Division NATO 1 NATO Science for Peace and Security (SPS) Programme
Mixed-Initiative Interactions for Mobile Robot Search
 Mixed-Initiative Interactions for Mobile Robot Search Curtis W. Nielsen and David J. Bruemmer and Douglas A. Few and Miles C. Walton Robotic and Human Systems Group Idaho National Laboratory {curtis.nielsen,
Mixed-Initiative Interactions for Mobile Robot Search Curtis W. Nielsen and David J. Bruemmer and Douglas A. Few and Miles C. Walton Robotic and Human Systems Group Idaho National Laboratory {curtis.nielsen,
Nuclear Safety and Security Culture Roles and Responsibilities of Individuals. Middle East Scientific Institute for Security (MESIS)
") Nuclear Safety and Security Culture Roles and Responsibilities of Individuals 8 th Annual RMCC Workshop Middle East Scientific Institute for Security (MESIS) Amman, Jordan June 17-19, 2013 Dr. J. David
Nuclear Safety and Security Culture Roles and Responsibilities of Individuals 8 th Annual RMCC Workshop Middle East Scientific Institute for Security (MESIS) Amman, Jordan June 17-19, 2013 Dr. J. David
CS594, Section 30682:
 CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
BENEFITS OF A DUAL-ARM ROBOTIC SYSTEM
 Part one of a four-part ebook Series. BENEFITS OF A DUAL-ARM ROBOTIC SYSTEM Don t just move through your world INTERACT with it. A Publication of RE2 Robotics Table of Contents Introduction What is a Highly
Part one of a four-part ebook Series. BENEFITS OF A DUAL-ARM ROBOTIC SYSTEM Don t just move through your world INTERACT with it. A Publication of RE2 Robotics Table of Contents Introduction What is a Highly
DoD Research and Engineering Enterprise
 DoD Research and Engineering Enterprise 16 th U.S. Sweden Defense Industry Conference May 10, 2017 Mary J. Miller Acting Assistant Secretary of Defense for Research and Engineering 1526 Technology Transforming
DoD Research and Engineering Enterprise 16 th U.S. Sweden Defense Industry Conference May 10, 2017 Mary J. Miller Acting Assistant Secretary of Defense for Research and Engineering 1526 Technology Transforming
Chemical-Biological Defense S&T For Homeland Security
 DHS SCIENCE AND TECHNOLOGY Chemical-Biological Defense S&T For Homeland Security August 2017 Dr. John W. Fischer Director, Chemical Biological Defense Division Homeland Security Advanced Research Projects
DHS SCIENCE AND TECHNOLOGY Chemical-Biological Defense S&T For Homeland Security August 2017 Dr. John W. Fischer Director, Chemical Biological Defense Division Homeland Security Advanced Research Projects
April 10, Develop and demonstrate technologies needed to remotely detect the early stages of a proliferant nation=s nuclear weapons program.
 Statement of Robert E. Waldron Assistant Deputy Administrator for Nonproliferation Research and Engineering National Nuclear Security Administration U. S. Department of Energy Before the Subcommittee on
Statement of Robert E. Waldron Assistant Deputy Administrator for Nonproliferation Research and Engineering National Nuclear Security Administration U. S. Department of Energy Before the Subcommittee on
Robotics and Artificial Intelligence. Rodney Brooks Director, MIT Computer Science and Artificial Intelligence Laboratory CTO, irobot Corp
 Robotics and Artificial Intelligence Rodney Brooks Director, MIT Computer Science and Artificial Intelligence Laboratory CTO, irobot Corp Report Documentation Page Form Approved OMB No. 0704-0188 Public
Robotics and Artificial Intelligence Rodney Brooks Director, MIT Computer Science and Artificial Intelligence Laboratory CTO, irobot Corp Report Documentation Page Form Approved OMB No. 0704-0188 Public
CHAPTER 36 EXPLOSIVE ORDNANCE DISPOSAL (EOD) NAVPERS B CH-62
 NAVPERS B CH-62") CHAPTER 36 EXPLOSIVE ORDNANCE DISPOSAL (EOD) NAVPERS 18068-36B CH-62 Updated: April 2015 SCOPE OF RATING TABLE OF CONTENTS EXPLOSIVE ORDNANCE DISPOSAL (EOD) EOD-3 GENERAL INFORMATION BASIC EXPLOSIVE ORDNANCE
CHAPTER 36 EXPLOSIVE ORDNANCE DISPOSAL (EOD) NAVPERS 18068-36B CH-62 Updated: April 2015 SCOPE OF RATING TABLE OF CONTENTS EXPLOSIVE ORDNANCE DISPOSAL (EOD) EOD-3 GENERAL INFORMATION BASIC EXPLOSIVE ORDNANCE
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Report to Congress regarding the Terrorism Information Awareness Program
 Report to Congress regarding the Terrorism Information Awareness Program In response to Consolidated Appropriations Resolution, 2003, Pub. L. No. 108-7, Division M, 111(b) Executive Summary May 20, 2003
Report to Congress regarding the Terrorism Information Awareness Program In response to Consolidated Appropriations Resolution, 2003, Pub. L. No. 108-7, Division M, 111(b) Executive Summary May 20, 2003
UNCLASSIFIED FY 2016 OCO. FY 2016 Base
 Exhibit R-2, RDT&E Budget Item Justification: PB 2016 Air Force Date: February 2015 3600: Research, Development, Test & Evaluation, Air Force / BA 2: Applied Research COST ($ in Millions) Prior Years FY
Exhibit R-2, RDT&E Budget Item Justification: PB 2016 Air Force Date: February 2015 3600: Research, Development, Test & Evaluation, Air Force / BA 2: Applied Research COST ($ in Millions) Prior Years FY
FY 2008 (October 1, 2007 September 30, 2008) NIMS Compliance Objectives and Metrics for Local Governments
 NIMS Compliance Objectives and Metrics for Local Governments") FY 2008 (October 1, 2007 September 30, 2008) NIMS Compliance Objectives and Metrics for Local Governments Introduction Homeland Security Presidential Directive (HSPD)- 5 Management of Domestic Incidents
FY 2008 (October 1, 2007 September 30, 2008) NIMS Compliance Objectives and Metrics for Local Governments Introduction Homeland Security Presidential Directive (HSPD)- 5 Management of Domestic Incidents
DoD Research and Engineering Enterprise
 DoD Research and Engineering Enterprise 18 th Annual National Defense Industrial Association Science & Emerging Technology Conference April 18, 2017 Mary J. Miller Acting Assistant Secretary of Defense
DoD Research and Engineering Enterprise 18 th Annual National Defense Industrial Association Science & Emerging Technology Conference April 18, 2017 Mary J. Miller Acting Assistant Secretary of Defense
Introduction to SECURE Program
 Introduction to SECURE Program Thomas A. Cellucci, Ph.D., MBA Chief Commercialization Officer Department of Homeland Security Science and Technology Email: Thomas.Cellucci@dhs.gov Homeland Security Mission
Introduction to SECURE Program Thomas A. Cellucci, Ph.D., MBA Chief Commercialization Officer Department of Homeland Security Science and Technology Email: Thomas.Cellucci@dhs.gov Homeland Security Mission
NIMS UPDATE 2017 RUPERT DENNIS, FEMA REGION IV, NIMS COORDINATOR. National Preparedness Directorate / National Integration Center.
 NIMS UPDATE 2017 RUPERT DENNIS, FEMA REGION IV, NIMS COORDINATOR National Preparedness Directorate / National Integration Center May 8, 2018 National Incident Management System (NIMS) Overview NIMS provides
NIMS UPDATE 2017 RUPERT DENNIS, FEMA REGION IV, NIMS COORDINATOR National Preparedness Directorate / National Integration Center May 8, 2018 National Incident Management System (NIMS) Overview NIMS provides
CS123. Programming Your Personal Robot. Part 3: Reasoning Under Uncertainty
 CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty Topics For Part 3 3.1 The Robot Programming Problem What is robot programming Challenges Real World vs. Virtual World Mapping and
CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty Topics For Part 3 3.1 The Robot Programming Problem What is robot programming Challenges Real World vs. Virtual World Mapping and
WMD Events and Other Catastrophes
 WMD Events and Other Catastrophes 2012 Joint CBRN Conference National Defense Industrial Association March 13, 2012 Tara O Toole, M.D., M.P.H. Under Secretary for Science and Technology U.S. Department
WMD Events and Other Catastrophes 2012 Joint CBRN Conference National Defense Industrial Association March 13, 2012 Tara O Toole, M.D., M.P.H. Under Secretary for Science and Technology U.S. Department
Weapons of Mass Destruction. These slides are provided courtesy of the Naval Post-graduate School Center for Homeland Defense and Security
 Weapons of Mass Destruction These slides are provided courtesy of the Naval Post-graduate School Center for Homeland Defense and Security Weapons of Mass Destruction? Weapon of Mass Destruction (WMD) OR
Weapons of Mass Destruction These slides are provided courtesy of the Naval Post-graduate School Center for Homeland Defense and Security Weapons of Mass Destruction? Weapon of Mass Destruction (WMD) OR
OFFensive Swarm-Enabled Tactics (OFFSET)
") OFFensive Swarm-Enabled Tactics (OFFSET) Dr. Timothy H. Chung, Program Manager Tactical Technology Office Briefing Prepared for OFFSET Proposers Day 1 Why are Swarms Hard: Complexity of Swarms Number Agent
OFFensive Swarm-Enabled Tactics (OFFSET) Dr. Timothy H. Chung, Program Manager Tactical Technology Office Briefing Prepared for OFFSET Proposers Day 1 Why are Swarms Hard: Complexity of Swarms Number Agent
S&T Stakeholders Conference
 S&T Stakeholders Conference T&E and Standards for First Responder Equipment Philip Mattson Program Manager Test & Evaluation and Standards Division Science and Technology Directorate June 2-5, 2008 PARTNERING
S&T Stakeholders Conference T&E and Standards for First Responder Equipment Philip Mattson Program Manager Test & Evaluation and Standards Division Science and Technology Directorate June 2-5, 2008 PARTNERING
Training that is standardized and supports the effective operations of NIIMS.
 HISTORY OF THE INCIDENT COMMAND SYSTEM In the early 1970's, Southern California experienced several devastating wildland fires. The overall cost and loss associated with these fires totaled $18 million
HISTORY OF THE INCIDENT COMMAND SYSTEM In the early 1970's, Southern California experienced several devastating wildland fires. The overall cost and loss associated with these fires totaled $18 million
Appendix B: Example Research-Activity Description
 Appendix B: Example Research-Activity Description To qualify as a research activity, work must advance the understanding of scientific relations or technologies, address scientific or technological uncertainty,
Appendix B: Example Research-Activity Description To qualify as a research activity, work must advance the understanding of scientific relations or technologies, address scientific or technological uncertainty,
Customer Showcase > Defense and Intelligence
 Customer Showcase Skyline TerraExplorer is a critical visualization technology broadly deployed in defense and intelligence, public safety and security, 3D geoportals, and urban planning markets. It fuses
Customer Showcase Skyline TerraExplorer is a critical visualization technology broadly deployed in defense and intelligence, public safety and security, 3D geoportals, and urban planning markets. It fuses
Information Access Challenges: Data Fission Needs of the Field Expert. Dr. Elizabeth Avery Gomez and Joe Chimento, New Jersey Institute of Technology
 Information Access Challenges: Data Fission Needs of the Field Expert Dr. Elizabeth Avery Gomez and, New Jersey Institute of Technology 1 Research Objective To increase the access to raw data for field
Information Access Challenges: Data Fission Needs of the Field Expert Dr. Elizabeth Avery Gomez and, New Jersey Institute of Technology 1 Research Objective To increase the access to raw data for field
S&T Stakeholders Conference
 S&T Stakeholders Conference May 21-24, 2007 Future Attribute Screening Technology Mobile Module (FAST M 2 ) Innovation/HSARPA HIP Bob Burns Program Manager Office of Innovation/Human Factors Division Science
S&T Stakeholders Conference May 21-24, 2007 Future Attribute Screening Technology Mobile Module (FAST M 2 ) Innovation/HSARPA HIP Bob Burns Program Manager Office of Innovation/Human Factors Division Science
Small Robot User Assessment irobot PackBot EOD Evaluation Report
 February 2007 System Assessment and Validation for Emergency Responders (SAVER) S u m m a r y Small Robot User Assessment irobot PackBot EOD Evaluation Report The U.S. Department of Homeland Security (DHS)
February 2007 System Assessment and Validation for Emergency Responders (SAVER) S u m m a r y Small Robot User Assessment irobot PackBot EOD Evaluation Report The U.S. Department of Homeland Security (DHS)
Knowledge Management for Command and Control
 Knowledge Management for Command and Control Dr. Marion G. Ceruti, Dwight R. Wilcox and Brenda J. Powers Space and Naval Warfare Systems Center, San Diego, CA 9 th International Command and Control Research
Knowledge Management for Command and Control Dr. Marion G. Ceruti, Dwight R. Wilcox and Brenda J. Powers Space and Naval Warfare Systems Center, San Diego, CA 9 th International Command and Control Research
Debrief of Dr. Whelan s TRL and Aerospace & R&D Risk Management. L. Waganer
 Debrief of Dr. Whelan s TRL and Aerospace & R&D Risk Management L. Waganer 21-22 January 2009 ARIES Project Meeting at UCSD Page 1 Purpose of TRL Briefings The TRL methodology was introduced to the ARIES
Debrief of Dr. Whelan s TRL and Aerospace & R&D Risk Management L. Waganer 21-22 January 2009 ARIES Project Meeting at UCSD Page 1 Purpose of TRL Briefings The TRL methodology was introduced to the ARIES
Development of Explosion-proof Autonomous Plant Operation Robot for Petrochemical Plants
 1 Development of Explosion-proof Autonomous Plant Operation Robot for Petrochemical Plants KOJI SHUKUTANI *1 KEN ONISHI *2 NORIKO ONISHI *1 HIROYOSHI OKAZAKI *3 HIROYOSHI KOJIMA *3 SYUHEI KOBORI *3 For
1 Development of Explosion-proof Autonomous Plant Operation Robot for Petrochemical Plants KOJI SHUKUTANI *1 KEN ONISHI *2 NORIKO ONISHI *1 HIROYOSHI OKAZAKI *3 HIROYOSHI KOJIMA *3 SYUHEI KOBORI *3 For
High Performance Computing Systems and Scalable Networks for. Information Technology. Joint White Paper from the
 High Performance Computing Systems and Scalable Networks for Information Technology Joint White Paper from the Department of Computer Science and the Department of Electrical and Computer Engineering With
High Performance Computing Systems and Scalable Networks for Information Technology Joint White Paper from the Department of Computer Science and the Department of Electrical and Computer Engineering With
CS 599: Distributed Intelligence in Robotics
 CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
Automatic Payload Deployment System (APDS)
") Automatic Payload Deployment System (APDS) Brian Suh Director, T2 Office WBT Innovation Marketplace 2012 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection
Automatic Payload Deployment System (APDS) Brian Suh Director, T2 Office WBT Innovation Marketplace 2012 Report Documentation Page Form Approved OMB No. 0704-0188 Public reporting burden for the collection
Julie L. Marble, Ph.D. Douglas A. Few David J. Bruemmer. August 24-26, 2005
 INEEL/CON-04-02277 PREPRINT I Want What You ve Got: Cross Platform Portability And Human-Robot Interaction Assessment Julie L. Marble, Ph.D. Douglas A. Few David J. Bruemmer August 24-26, 2005 Performance
INEEL/CON-04-02277 PREPRINT I Want What You ve Got: Cross Platform Portability And Human-Robot Interaction Assessment Julie L. Marble, Ph.D. Douglas A. Few David J. Bruemmer August 24-26, 2005 Performance
The Nuclear Regulatory Commission s Oversight of Safety Culture
 The Nuclear Regulatory Commission s Oversight of Safety Culture Diane J. Sieracki Senior Safety Culture Program Manager Office of Enforcement IAEA TM October 6-8, 2014 1 2 Outline History of safety culture
The Nuclear Regulatory Commission s Oversight of Safety Culture Diane J. Sieracki Senior Safety Culture Program Manager Office of Enforcement IAEA TM October 6-8, 2014 1 2 Outline History of safety culture
Notice from the Federal Ministry of Labour and Social Affairs of May 2011 IIIb
 The following text is a translation 1 of the interpretation of the term "assemblies of machinery" used in the Machinery Directive 2006/42/EC from 5 th May 2011 [ ] Federal Ministry of Labour and Social
The following text is a translation 1 of the interpretation of the term "assemblies of machinery" used in the Machinery Directive 2006/42/EC from 5 th May 2011 [ ] Federal Ministry of Labour and Social
UNCLASSIFIED. FY 2016 Base FY 2016 OCO
 Exhibit R-2, RDT&E Budget Item Justification: PB 2016 Navy Date: February 2015 1319: Research, elopment, Test & Evaluation, Navy / BA 3: Advanced Technology elopment (ATD) COST ($ in Millions) Prior Years
Exhibit R-2, RDT&E Budget Item Justification: PB 2016 Navy Date: February 2015 1319: Research, elopment, Test & Evaluation, Navy / BA 3: Advanced Technology elopment (ATD) COST ($ in Millions) Prior Years
Aberdeen Proving Ground Advanced Planning Briefing to Industry
 Edgewood Chemical Biological Center Aberdeen Proving Ground Advanced Planning Briefing to Industry 2 February 2017 Mr. Michael Abaie Director, Engineering ECBC at a Glance Specialized Workforce Unique
Edgewood Chemical Biological Center Aberdeen Proving Ground Advanced Planning Briefing to Industry 2 February 2017 Mr. Michael Abaie Director, Engineering ECBC at a Glance Specialized Workforce Unique
An Overview of DHS S&T Chem/Bio Protection & Decontamination
 An Overview of DHS S&T Chem/Bio Protection & Decontamination Joint Chemical Biological Decontamination & Protection Conference & Exhibition October 22-25, 2007 Virginia Beach Convention Center, Virginia
An Overview of DHS S&T Chem/Bio Protection & Decontamination Joint Chemical Biological Decontamination & Protection Conference & Exhibition October 22-25, 2007 Virginia Beach Convention Center, Virginia
Political Science 154: Weapons of Mass Destruction
 Political Science 154: Weapons of Mass Destruction Political Science 12: International Relations Introductions Syllabus Course requirements Student standards Readings Schedule How to succeed in this course
Political Science 154: Weapons of Mass Destruction Political Science 12: International Relations Introductions Syllabus Course requirements Student standards Readings Schedule How to succeed in this course
Science on the Fly. Preview. Autonomous Science for Rover Traverse. David Wettergreen The Robotics Institute Carnegie Mellon University
 Science on the Fly Autonomous Science for Rover Traverse David Wettergreen The Robotics Institute University Preview Motivation and Objectives Technology Research Field Validation 1 Science Autonomy Science
Science on the Fly Autonomous Science for Rover Traverse David Wettergreen The Robotics Institute University Preview Motivation and Objectives Technology Research Field Validation 1 Science Autonomy Science
Combating Terrorism I 143
 Combating Terrorism L.01 Vehicle Entry Point Screening L.03 National Infrastructure Protection L.04 Standoff Detection of Nitrogen-Based Explosives L.05 Diagnostic Analysis of Improvised Explosive Devices
Combating Terrorism L.01 Vehicle Entry Point Screening L.03 National Infrastructure Protection L.04 Standoff Detection of Nitrogen-Based Explosives L.05 Diagnostic Analysis of Improvised Explosive Devices
Drones and Broadband Data for the PSAP The Role of Robotics and Artificial Intelligence
 Drones and Broadband Data for the PSAP The Role of Robotics and Artificial Intelligence Barry H. Luke, Deputy Executive Director Thursday, April 13, 2017 APCO Western Regional Conference Ontario, California
Drones and Broadband Data for the PSAP The Role of Robotics and Artificial Intelligence Barry H. Luke, Deputy Executive Director Thursday, April 13, 2017 APCO Western Regional Conference Ontario, California
Autonomous weapons systems as WMD vectors a new threat and a potential for terrorism?
 ISADARCO Winter Course 2016, Andalo, Italy, 8-15 January 2016 Advanced and cyber weapons systems: Technology and Arms control Autonomous weapons systems as WMD vectors a new threat and a potential for
ISADARCO Winter Course 2016, Andalo, Italy, 8-15 January 2016 Advanced and cyber weapons systems: Technology and Arms control Autonomous weapons systems as WMD vectors a new threat and a potential for
EPRI Update. Marc H. Tannenbaum Technical Leader, EPRI. RAPID Clearwater Beach, Florida May16, 2016
 EPRI Update Marc H. Tannenbaum Technical Leader, EPRI RAPID Clearwater Beach, Florida May16, 2016 Recently Completed EPRI Products (www.epri.com) Digital Equivalency Evaluation: Screening Checklist and
EPRI Update Marc H. Tannenbaum Technical Leader, EPRI RAPID Clearwater Beach, Florida May16, 2016 Recently Completed EPRI Products (www.epri.com) Digital Equivalency Evaluation: Screening Checklist and
Partnering with Industry
 U.S. Army Edgewood Chemical Biological Center Partnering with Industry Michael Abaie, Director of Engineering, ECBC 22 July 2015 Approved for Public Release Edgewood Chemical Biological Center Specialized
U.S. Army Edgewood Chemical Biological Center Partnering with Industry Michael Abaie, Director of Engineering, ECBC 22 July 2015 Approved for Public Release Edgewood Chemical Biological Center Specialized
Overview of Need and Current Status of LPS for Emergency Response
 Precision Indoor Personnel Location and Tracking for Emergency Responders Workshop Overview of Need and Current Status of LPS for Emergency Response Krzysztof Kolodziej Author & Consultant IndoorLBS.com
Precision Indoor Personnel Location and Tracking for Emergency Responders Workshop Overview of Need and Current Status of LPS for Emergency Response Krzysztof Kolodziej Author & Consultant IndoorLBS.com
2018 Border Challenge Robotics Competition
 2018 Border Challenge Robotics Competition https://borderchallenge.weebly.com/ Table of Contents Section 1 Introduction... 2 Section 2 The Robot... 2 Robot Overview... 2 Robot Rules... 2 Section 3 The
2018 Border Challenge Robotics Competition https://borderchallenge.weebly.com/ Table of Contents Section 1 Introduction... 2 Section 2 The Robot... 2 Robot Overview... 2 Robot Rules... 2 Section 3 The
Office of Chief Technologist - Space Technology Program Dr. Prasun Desai Office of the Chief Technologist May 1, 2012
 Office of Chief Technologist - Space Technology Program Dr. Prasun Desai Office of the Chief Technologist May 1, 2012 O f f i c e o f t h e C h i e f T e c h n o l o g i s t Office of the Chief Technologist
Office of Chief Technologist - Space Technology Program Dr. Prasun Desai Office of the Chief Technologist May 1, 2012 O f f i c e o f t h e C h i e f T e c h n o l o g i s t Office of the Chief Technologist
SDN Architecture 1.0 Overview. November, 2014
 SDN Architecture 1.0 Overview November, 2014 ONF Document Type: TR ONF Document Name: TR_SDN ARCH Overview 1.1 11112014 Disclaimer THIS DOCUMENT IS PROVIDED AS IS WITH NO WARRANTIES WHATSOEVER, INCLUDING
SDN Architecture 1.0 Overview November, 2014 ONF Document Type: TR ONF Document Name: TR_SDN ARCH Overview 1.1 11112014 Disclaimer THIS DOCUMENT IS PROVIDED AS IS WITH NO WARRANTIES WHATSOEVER, INCLUDING
Educate New Generation on Nuclear Technology through Collaborating Engineering Project
 Educate New Generation on Nuclear Technology through Collaborating Engineering Project Abstract Suxia Cui, John Fuller, Pamela Holland-Obiomon, and Warsame H. Ali Electrical and Computer Engineering Department
Educate New Generation on Nuclear Technology through Collaborating Engineering Project Abstract Suxia Cui, John Fuller, Pamela Holland-Obiomon, and Warsame H. Ali Electrical and Computer Engineering Department
Structure and Synthesis of Robot Motion
 Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
INFCIRC/57. 72/Rev.6. under. Safetyy. read in. Convention. involve. National Reports. on Nuclear 2015.
 Atoms for Peace and Development Information Circular INFCIRC/57 72/Rev.6 Date: 19 January 2018 General Distribution Original: English Guidelines regarding Convention National Reports under the on Nuclear
Atoms for Peace and Development Information Circular INFCIRC/57 72/Rev.6 Date: 19 January 2018 General Distribution Original: English Guidelines regarding Convention National Reports under the on Nuclear
Evaluation of Man- Portable Robots for Urban Missions
 Evaluation of Man- Portable Robots for Urban Missions Henrik I. Christensen KUKA Chair of Robotics - hic@cc.gatech.edu Center for Autonomous Systems Royal Institute of Technology Stockholm, Sweden Robotics
Evaluation of Man- Portable Robots for Urban Missions Henrik I. Christensen KUKA Chair of Robotics - hic@cc.gatech.edu Center for Autonomous Systems Royal Institute of Technology Stockholm, Sweden Robotics
Stakeholders Conference
 Stakeholders Conference January 14-17, 2008 S&T Portfolio Director s Panel Mr. Robert Hooks, Director of Transition Dr. Roger D. McGinnis, Sr., Director of Innovation/HSARPA Dr. Starnes Walker, Director
Stakeholders Conference January 14-17, 2008 S&T Portfolio Director s Panel Mr. Robert Hooks, Director of Transition Dr. Roger D. McGinnis, Sr., Director of Innovation/HSARPA Dr. Starnes Walker, Director
Human-Robot Interaction. Aaron Steinfeld Robotics Institute Carnegie Mellon University
 Human-Robot Interaction Aaron Steinfeld Robotics Institute Carnegie Mellon University Human-Robot Interface Sandstorm, www.redteamracing.org Typical Questions: Why is field robotics hard? Why isn t machine
Human-Robot Interaction Aaron Steinfeld Robotics Institute Carnegie Mellon University Human-Robot Interface Sandstorm, www.redteamracing.org Typical Questions: Why is field robotics hard? Why isn t machine
2008 Course Programs Schedule
 2008 Course Programs Schedule Basic Laboratory Safety Laboratory Safety Biostatistics for the Non-Statistician - Basic Applied cgmps for Pharmaceutical and Allied Industries Good Clinical Practices (GCP)
2008 Course Programs Schedule Basic Laboratory Safety Laboratory Safety Biostatistics for the Non-Statistician - Basic Applied cgmps for Pharmaceutical and Allied Industries Good Clinical Practices (GCP)
INFORMATION SYSTEMS. 8 September Advanced Planning Briefing to Industry
 Distribution Statement A: Approved for Public Release; Distribution is Unlimited 1 Joint Program Executive Office for Chemical and Biological Defense Joint Science and Technology Office INFORMATION SYSTEMS
Distribution Statement A: Approved for Public Release; Distribution is Unlimited 1 Joint Program Executive Office for Chemical and Biological Defense Joint Science and Technology Office INFORMATION SYSTEMS
UNCLASSIFIED. UNCLASSIFIED R-1 Line Item #13 Page 1 of 11
 Exhibit R-2, PB 2010 Air Force RDT&E Budget Item Justification DATE: May 2009 Applied Research COST ($ in Millions) FY 2008 Actual FY 2009 FY 2010 FY 2011 FY 2012 FY 2013 FY 2014 FY 2015 Cost To Complete
Exhibit R-2, PB 2010 Air Force RDT&E Budget Item Justification DATE: May 2009 Applied Research COST ($ in Millions) FY 2008 Actual FY 2009 FY 2010 FY 2011 FY 2012 FY 2013 FY 2014 FY 2015 Cost To Complete
Amateur Radio Emergency Communications Interoperability Plan
 Amateur Radio Emergency Communications Interoperability Plan Washington State Regional Homeland Security Coordination District IV Clark County Cowlitz County Skamania County Wahkiakum County v1.0 adopted:
Amateur Radio Emergency Communications Interoperability Plan Washington State Regional Homeland Security Coordination District IV Clark County Cowlitz County Skamania County Wahkiakum County v1.0 adopted:
Future of New Capabilities
 Future of New Capabilities Mr. Dale Ormond, Principal Director for Research, Assistant Secretary of Defense (Research & Engineering) DoD Science and Technology Vision Sustaining U.S. technological superiority,
Future of New Capabilities Mr. Dale Ormond, Principal Director for Research, Assistant Secretary of Defense (Research & Engineering) DoD Science and Technology Vision Sustaining U.S. technological superiority,
Unmanned Ground Military and Construction Systems Technology Gaps Exploration
 Unmanned Ground Military and Construction Systems Technology Gaps Exploration Eugeniusz Budny a, Piotr Szynkarczyk a and Józef Wrona b a Industrial Research Institute for Automation and Measurements Al.
Unmanned Ground Military and Construction Systems Technology Gaps Exploration Eugeniusz Budny a, Piotr Szynkarczyk a and Józef Wrona b a Industrial Research Institute for Automation and Measurements Al.
Wednesday, October 29, :00-04:00pm EB: 3546D. TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof.
 Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Technology Roadmapping. Lesson 3
 Technology Roadmapping Lesson 3 Leadership in Science & Technology Management Mission Vision Strategy Goals/ Implementation Strategy Roadmap Creation Portfolios Portfolio Roadmap Creation Project Prioritization
Technology Roadmapping Lesson 3 Leadership in Science & Technology Management Mission Vision Strategy Goals/ Implementation Strategy Roadmap Creation Portfolios Portfolio Roadmap Creation Project Prioritization
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Lessons Learned from the US Chemical Safety and Hazard Investigations Board. presented at
 Lessons Learned from the US Chemical Safety and Hazard Investigations Board presented at The IAEA International Conference on Human and Organizational Aspects of Assuring Nuclear Safety Exploring 30 Years
Lessons Learned from the US Chemical Safety and Hazard Investigations Board presented at The IAEA International Conference on Human and Organizational Aspects of Assuring Nuclear Safety Exploring 30 Years
Development of Recommended Practices for Audio Frequency Track Circuits. Robert A. MacDonald Director of Systems Engineering B&C Transit Oakland, CA
 Development of Recommended Practices for Audio Frequency Track Circuits Robert A. MacDonald Director of Systems Engineering B&C Transit Oakland, CA Points of Discussion Getting Consensus Understanding
Development of Recommended Practices for Audio Frequency Track Circuits Robert A. MacDonald Director of Systems Engineering B&C Transit Oakland, CA Points of Discussion Getting Consensus Understanding
EU regulatory system for robots
 EU regulatory system for robots CE marking of robots today and in the future Felicia Stoica DG GROW Summary Access to the EU market - marking for robots EU safety laws for robots and role of EN standards
EU regulatory system for robots CE marking of robots today and in the future Felicia Stoica DG GROW Summary Access to the EU market - marking for robots EU safety laws for robots and role of EN standards
Analysis of Human-Robot Interaction for Urban Search and Rescue
 Analysis of Human-Robot Interaction for Urban Search and Rescue Holly A. Yanco, Michael Baker, Robert Casey, Brenden Keyes, Philip Thoren University of Massachusetts Lowell One University Ave, Olsen Hall
Analysis of Human-Robot Interaction for Urban Search and Rescue Holly A. Yanco, Michael Baker, Robert Casey, Brenden Keyes, Philip Thoren University of Massachusetts Lowell One University Ave, Olsen Hall
SAFETY CASE ON A PAGE
 SAFETY CASE ON A PAGE Dr Sally A. Forbes, Nuclear Safety Department, AWE, Aldermaston, Reading, Berkshire RG7 4PR, UK Keywords: Safety Case, SHAPED, Hazard Awareness Introduction Safety Case on a Page
SAFETY CASE ON A PAGE Dr Sally A. Forbes, Nuclear Safety Department, AWE, Aldermaston, Reading, Berkshire RG7 4PR, UK Keywords: Safety Case, SHAPED, Hazard Awareness Introduction Safety Case on a Page
ENGINEERING What can I do with this degree?
 ENGINEERING What can I do with this degree? ANY DISCIPLINE Production Sales and Marketing Management Consulting Research and Development Teaching Law AEROSPACE Propulsion Fluid Mechanics Thermodynamics
ENGINEERING What can I do with this degree? ANY DISCIPLINE Production Sales and Marketing Management Consulting Research and Development Teaching Law AEROSPACE Propulsion Fluid Mechanics Thermodynamics
Workshop Summary. Presented to LEAG Annual Meeting, October 4, Kelly Snook, NASA Headquarters
 Workshop Summary Presented to LEAG Annual Meeting, October 4, 2007 -- Kelly Snook, NASA Headquarters Workshop Agenda 2 Workshop Agenda (cont.) 3 Workshop Agenda (Cont.) 4 Breakout Discussion Matrix 5 Prepared
Workshop Summary Presented to LEAG Annual Meeting, October 4, 2007 -- Kelly Snook, NASA Headquarters Workshop Agenda 2 Workshop Agenda (cont.) 3 Workshop Agenda (Cont.) 4 Breakout Discussion Matrix 5 Prepared
PAPUA NEW GUINEA HYDROGRAPHIC SERVICE
 PAPUA NEW GUINEA HYDROGRAPHIC SERVICE IHO SOUTH WEST PACIFIC HYDROGRAPHIC COMMISSION (SWPHC) 9 th Meeting Port Moresby, Papua New Guinea, 10-11 March 2007 SWPHC9-01PNG 1. INTRODUCTION 9 th SOUTH WEST PACIFIC
PAPUA NEW GUINEA HYDROGRAPHIC SERVICE IHO SOUTH WEST PACIFIC HYDROGRAPHIC COMMISSION (SWPHC) 9 th Meeting Port Moresby, Papua New Guinea, 10-11 March 2007 SWPHC9-01PNG 1. INTRODUCTION 9 th SOUTH WEST PACIFIC
2012 International Symposium on Safety Science and Technology Master of science in safety engineering at KU Leuven, Belgium
 Available online at www.sciencedirect.com Procedia Engineering 45 (2012 ) 276 280 2012 International Symposium on Safety Science and Technology Master of science in safety engineering at KU Leuven, Belgium
Available online at www.sciencedirect.com Procedia Engineering 45 (2012 ) 276 280 2012 International Symposium on Safety Science and Technology Master of science in safety engineering at KU Leuven, Belgium
Briefing for NPSTC DHS SCIENCE AND TECHNOLOGY 2017 FIRST RESPONDER ELECTRONIC JAMMING EXERCISE. September 6, 2017
 DHS SCIENCE AND TECHNOLOGY Briefing for NPSTC 2017 FIRST RESPONDER ELECTRONIC JAMMING EXERCISE September 6, 2017 Sridhar Kowdley Program Manager First Responders Group Science and Technology Directorate
DHS SCIENCE AND TECHNOLOGY Briefing for NPSTC 2017 FIRST RESPONDER ELECTRONIC JAMMING EXERCISE September 6, 2017 Sridhar Kowdley Program Manager First Responders Group Science and Technology Directorate
Lesson 17: Science and Technology in the Acquisition Process
 Lesson 17: Science and Technology in the Acquisition Process U.S. Technology Posture Defining Science and Technology Science is the broad body of knowledge derived from observation, study, and experimentation.
Lesson 17: Science and Technology in the Acquisition Process U.S. Technology Posture Defining Science and Technology Science is the broad body of knowledge derived from observation, study, and experimentation.
American Nuclear Society
 American Nuclear Society 1 Unraveling the Mystery of Consensus Standards Presented by: The American Nuclear Society Standards Committee January 31, 2017 Copyright 2017 by American Nuclear Society Purpose
American Nuclear Society 1 Unraveling the Mystery of Consensus Standards Presented by: The American Nuclear Society Standards Committee January 31, 2017 Copyright 2017 by American Nuclear Society Purpose
Industrial Mobile Robots Safety Standard Update. Michael Gerstenberger Chair R15.08 Subcommittee
 Industrial Mobile Robots Safety Standard Update Michael Gerstenberger Chair R15.08 Subcommittee Outline Background Definitions and examples Existing standards Key questions/topics Participation Speaker
Industrial Mobile Robots Safety Standard Update Michael Gerstenberger Chair R15.08 Subcommittee Outline Background Definitions and examples Existing standards Key questions/topics Participation Speaker
GeoShield Web: Journey of a Silverlight Mashup
 GeoShield Web: Journey of a Silverlight Mashup Craig E. Oaks ESRI Federal User Conference February 2010 GeoShield Web Web-enabled geospatial mashup application focused on CBRN and Force Protection workflows.
GeoShield Web: Journey of a Silverlight Mashup Craig E. Oaks ESRI Federal User Conference February 2010 GeoShield Web Web-enabled geospatial mashup application focused on CBRN and Force Protection workflows.
In cooperative robotics, the group of robots have the same goals, and thus it is
 Brian Bairstow 16.412 Problem Set #1 Part A: Cooperative Robotics In cooperative robotics, the group of robots have the same goals, and thus it is most efficient if they work together to achieve those
Brian Bairstow 16.412 Problem Set #1 Part A: Cooperative Robotics In cooperative robotics, the group of robots have the same goals, and thus it is most efficient if they work together to achieve those
MÄK Technologies, Inc. Visualization for Decision Superiority
 Visualization for Decision Superiority Purpose Explain how different visualization techniques can aid decision makers in shortening the decision cycle, decreasing information uncertainty, and improving
Visualization for Decision Superiority Purpose Explain how different visualization techniques can aid decision makers in shortening the decision cycle, decreasing information uncertainty, and improving
The U.S. Decennial Census A Brief History
 1 The U.S. Decennial Census A Brief History Under the direction of then Secretary of State, Thomas Jefferson, the first U.S. Census began on August 2, 1790, and was to be completed by April 1791 The total
1 The U.S. Decennial Census A Brief History Under the direction of then Secretary of State, Thomas Jefferson, the first U.S. Census began on August 2, 1790, and was to be completed by April 1791 The total
Business with the UK MoD
 Business with the UK MoD Feb. 05 2009 Bruhn NewTech Jacob Perch Nielsen Agenda Bruhn NewTech, who we are History Bruhn NewTech Limited Do s and Don t s 1 Our mission Bruhn NewTech s core aim is to help
Business with the UK MoD Feb. 05 2009 Bruhn NewTech Jacob Perch Nielsen Agenda Bruhn NewTech, who we are History Bruhn NewTech Limited Do s and Don t s 1 Our mission Bruhn NewTech s core aim is to help
Health Initiatives in Southeast Asia
 Health Initiatives in Southeast Asia 1 Dhaka, Bangladesh: On any given day 1/3 of the population is sick. Grameen Shakti, 2010 Image: InSTEDD 2 Southeast Asia is a particular haven for zoonotic diseases.
Health Initiatives in Southeast Asia 1 Dhaka, Bangladesh: On any given day 1/3 of the population is sick. Grameen Shakti, 2010 Image: InSTEDD 2 Southeast Asia is a particular haven for zoonotic diseases.
A Case for Regulatory Framework
 01 June 2011 Nuclear Process Regulatory Licensing Adv Boyce Mkhize, NNR CEO NIASA CTICC Localization Conference : A Case for Regulatory Framework To ensure high levels of safety and institutionalisation
01 June 2011 Nuclear Process Regulatory Licensing Adv Boyce Mkhize, NNR CEO NIASA CTICC Localization Conference : A Case for Regulatory Framework To ensure high levels of safety and institutionalisation
Secure Societies. Pauli Stigell, Pekka Rantala
 Secure Societies Pauli Stigell, Pekka Rantala Security Union Security research is on the rise in conventional and cyber fields. Finns have a relatively good record in this programme and the programme s
Secure Societies Pauli Stigell, Pekka Rantala Security Union Security research is on the rise in conventional and cyber fields. Finns have a relatively good record in this programme and the programme s
The Value of Simulators for CBRN Reconnaissance Vehicle Training whitepaper
 The Value of Simulators for CBRN Reconnaissance Vehicle Training whitepaper Photo courtesy CBRNS UK The Value of Simulators for CBRN Reconnaissance Vehicle Training A discussion of the options available
The Value of Simulators for CBRN Reconnaissance Vehicle Training whitepaper Photo courtesy CBRNS UK The Value of Simulators for CBRN Reconnaissance Vehicle Training A discussion of the options available
Human-Swarm Interaction
 Human-Swarm Interaction a brief primer Andreas Kolling irobot Corp. Pasadena, CA Swarm Properties - simple and distributed - from the operator s perspective - distributed algorithms and information processing
Human-Swarm Interaction a brief primer Andreas Kolling irobot Corp. Pasadena, CA Swarm Properties - simple and distributed - from the operator s perspective - distributed algorithms and information processing
19 and 20 November 2018 RC-4/DG.4 15 November 2018 Original: ENGLISH NOTE BY THE DIRECTOR-GENERAL
 OPCW Conference of the States Parties Twenty-Third Session C-23/DG.16 19 and 20 November 2018 15 November 2018 Original: ENGLISH NOTE BY THE DIRECTOR-GENERAL REPORT ON PROPOSALS AND OPTIONS PURSUANT TO
OPCW Conference of the States Parties Twenty-Third Session C-23/DG.16 19 and 20 November 2018 15 November 2018 Original: ENGLISH NOTE BY THE DIRECTOR-GENERAL REPORT ON PROPOSALS AND OPTIONS PURSUANT TO
Safety Culture. the core values and behaviors resulting from a collective commitment
 Safety Culture Policy Statement the core values and behaviors resulting from a collective commitment... to emphasize safety over competing goals to ensure protection of people and the environment. N.C.
Safety Culture Policy Statement the core values and behaviors resulting from a collective commitment... to emphasize safety over competing goals to ensure protection of people and the environment. N.C.
Stress and Strain Analysis in Critical Joints of the Bearing Parts of the Mobile Platform Using Tensometry
 American Journal of Mechanical Engineering, 2016, Vol. 4, No. 7, 394-399 Available online at http://pubs.sciepub.com/ajme/4/7/30 Science and Education Publishing DOI:10.12691/ajme-4-7-30 Stress and Strain
American Journal of Mechanical Engineering, 2016, Vol. 4, No. 7, 394-399 Available online at http://pubs.sciepub.com/ajme/4/7/30 Science and Education Publishing DOI:10.12691/ajme-4-7-30 Stress and Strain
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Robotic Systems. Jeff Jaster Deputy Associate Director for Autonomous Systems US Army TARDEC Intelligent Ground Systems
 Robotic Systems Jeff Jaster Deputy Associate Director for Autonomous Systems US Army TARDEC Intelligent Ground Systems Robotics Life Cycle Mission Integrate, Explore, and Develop Robotics, Network and
Robotic Systems Jeff Jaster Deputy Associate Director for Autonomous Systems US Army TARDEC Intelligent Ground Systems Robotics Life Cycle Mission Integrate, Explore, and Develop Robotics, Network and