Michael Cowling, CQUniversity. This work is licensed under a Creative Commons Attribution 4.0 International License
|
|
|
- Andra Underwood
- 5 years ago
- Views:
Transcription



1 #THETA2017 Michael Cowling, CQUniversity This work is licensed under a Creative Commons Attribution 4.0 International License
 Dr Michael A.")
2 A Short Introduction to Boris the Teaching Assistant (AKA How Can A Robot Help Me in Class?) Dr Michael A. Cowling Senior Lecturer in Educational Technology CQUniversity Australia



3 A Little Bit About Me.

4 Coming Soon! (in the meantime, visit


5
6 Pedagogy Before Technology
7 Start with the Problem in the Classroom THEN Think about ways to Solve that Problem THEN Work out How Technology Can Help

8 Robotics Building a Robotic Teaching Assistant Robotics Architecture in the Cloud Artificial Intelligence Support for Local Semi-Autonomous Robot Companions
9 What is the problem? Teachers are short of time Students sometimes worry about asking a teacher questions or interrupting the class Teaching Assistants can help, but they re not experts in the subject matter often volunteers or parents Robotics can provide students with a familiar, humanoid system to interact with, but without the concerns of looking stupid
10 What does a Teaching Assistant Do? Task responsibilities Percent of Sample Working with small groups of students on academic tasks (e.g. reading, maths, word study, science) 100% General classroom support for students and teachers 100% Administrative duties for teachers (e.g. photocopying gathering resources, data entry, filing, setting up activities) 96% One-on-one support for ascertained students with disabilities 67% Top 4 Teaching Aide Tasks (Harris & Aprile, 2015)
11 NAO Robot Produced by Aldebaran Robotics Around 2 feet tall 2 cameras (top and bottom), 2 microphones (left and right) Basic Voice Recognition Full Articulation (moving hands, feet, sitting down, laying down etc) Programmed using graphical tool (Choreographe) or Python
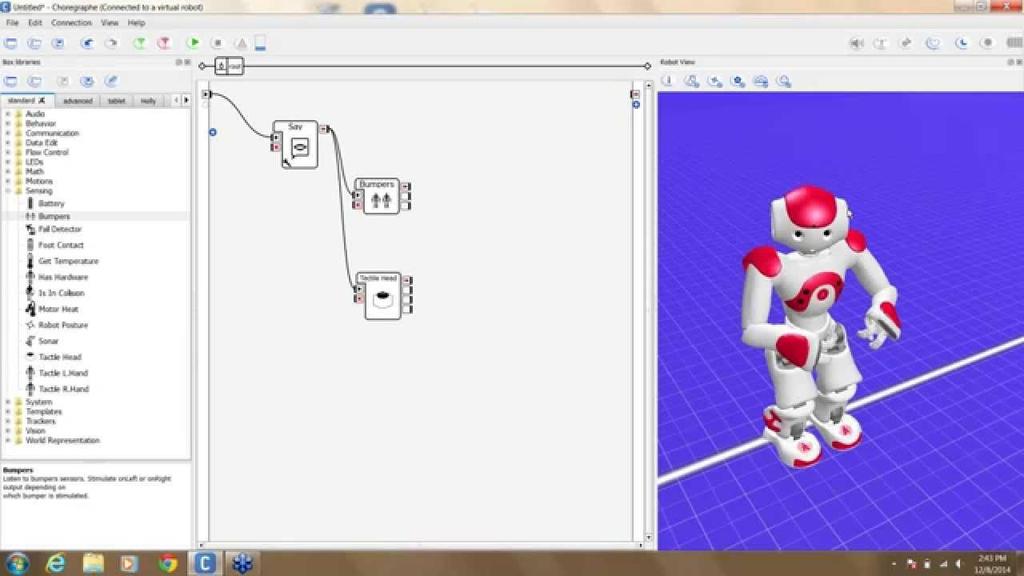
12 Choreographe
13 Our Robotics Project Industry Partnership - ACME Robotics Commercial Robot called Boris Robot as a Robotic Teaching Assistant Collects Feedback from Students Poses Questions to the Instructor Acts as an Autonomous Guide for FAQs Needed to develop a system that could control this type of robot
14 Command MVE SET SPK Description Moves the robot. Parameters for this instruction are: W - Forward; S - Stop; A - Left; D - Right; Q - Turn Left; E - Turn Right; X - Stop Used by the Lecturer only. SET:Timer=X where X is the number of seconds. Designed to set / configure many different variables for testing purposes. Appends question to the list of questions. Lecturer can decide when questions will be answered by touching buttons on the robots forehead. Questions will be added to the questions database. SPN Speak now. Used for when asking urgent questions, the question will not be saved in the database. Response from student. Student can click on the smile and crying face image where robot would then either nod RES its head or yawn. More responses can be added and format used is RES:fun or RES:bored. Will be used in the future to aggregate an average response from the class and reflect in the robots mood. Robotic Assistant Instruction Set Commands

15 Overall Program in Choreographe
16 Server Side Programming Robot and Server (speaking a question) 1.User connects to server IP address from browser 2.User click walk and browser send GET request to index.php?do=s 3.Server: If sask.php exists, writes SPK<question> to the file 4.Robot: Checks every 1 second a.server (boris.php): Checks sask.php and if content is not empty, send contents to Boris. Then deletes sask.php content. File is locked before reading and deleting content. 5.Robot: Receives content from server. (In this case SPK:<question> ) a.since content starts with SPK: calls speak function. b.<question> is added to the queue for the robot to ask when prompted by the lecturer Robot & Server Code Sequence

17 Bringing it All Together
18 Research Design Design Based Research (DBR) Methodology Initial Data Gathering & Initial Prototype Classroom Testing Teaching Acceptance Model (TAM) Pre and Post Testing for Learning Outcomes Qualitative & Quantitative Data Collected Survey & Focus Group Data Analysis & Prototype Refinement

19 Our Friend Boris

20
21 Pedagogy Before Technology
KI-SUNG SUH USING NAO INTRODUCTION TO INTERACTIVE HUMANOID ROBOTS
 KI-SUNG SUH USING NAO INTRODUCTION TO INTERACTIVE HUMANOID ROBOTS 2 WORDS FROM THE AUTHOR Robots are both replacing and assisting people in various fields including manufacturing, extreme jobs, and service
KI-SUNG SUH USING NAO INTRODUCTION TO INTERACTIVE HUMANOID ROBOTS 2 WORDS FROM THE AUTHOR Robots are both replacing and assisting people in various fields including manufacturing, extreme jobs, and service
Teaching Kids to Program. Lesson Plan: Interactive Holiday Card
 Teaching Kids to Program Lesson Plan: Interactive Holiday Card Step 1: 1. Open your web browser and go to SCRATCH (http://scratch.mit.edu/ ) 2. Sign in to your Scratch account by clicking on the button
Teaching Kids to Program Lesson Plan: Interactive Holiday Card Step 1: 1. Open your web browser and go to SCRATCH (http://scratch.mit.edu/ ) 2. Sign in to your Scratch account by clicking on the button
West Windsor-Plainsboro Regional School District Advanced Topics in Computer Science Grades 9-12
 West Windsor-Plainsboro Regional School District Advanced Topics in Computer Science Grades 9-12 Unit 1: Recursion Content Area: Technology Course & Grade Level: Advanced Topics in Computer Science, 9
West Windsor-Plainsboro Regional School District Advanced Topics in Computer Science Grades 9-12 Unit 1: Recursion Content Area: Technology Course & Grade Level: Advanced Topics in Computer Science, 9
TAMALPAIS UNION HIGH SCHOOL DISTRICT Larkspur, California. Course of Study PHOTOGRAPHY 1
 TAMALPAIS UNION HIGH SCHOOL DISTRICT Larkspur, California Course of Study PHOTOGRAPHY 1 I. INTRODUCTION Photography 1 is an introductory class in the art and craft of using a camera, developing film, and
TAMALPAIS UNION HIGH SCHOOL DISTRICT Larkspur, California Course of Study PHOTOGRAPHY 1 I. INTRODUCTION Photography 1 is an introductory class in the art and craft of using a camera, developing film, and
Manga (Level 2) Course Title: Manga (Level 2) Age Group: 12-18
 Course Title: Manga (Level 2) Age Group: 12-18") Manga (Level 2) Course Title: Manga (Level 2) Age Group: 12-18 Tutor: Rachel Hamel Tutor s Phone No. 0567142185 Cost : 800 AED Day / Date: Start time: End time: No. Weeks: Hours: Material Fee: Monday 3.30pm
Manga (Level 2) Course Title: Manga (Level 2) Age Group: 12-18 Tutor: Rachel Hamel Tutor s Phone No. 0567142185 Cost : 800 AED Day / Date: Start time: End time: No. Weeks: Hours: Material Fee: Monday 3.30pm
FACULTY MENTOR Khoshabeh, Ramsin. PROJECT TITLE PiB: Learning Python
 PiB: Learning Python hands-on development skills to engineering students. This PiB is a set of independent programs that strengthen the student s programming skills through Python, utilizing Python libraries
PiB: Learning Python hands-on development skills to engineering students. This PiB is a set of independent programs that strengthen the student s programming skills through Python, utilizing Python libraries
Children and Social Robots: An integrative framework
 Children and Social Robots: An integrative framework Jochen Peter Amsterdam School of Communication Research University of Amsterdam (Funded by ERC Grant 682733, CHILDROBOT) Prague, November 2016 Prague,
Children and Social Robots: An integrative framework Jochen Peter Amsterdam School of Communication Research University of Amsterdam (Funded by ERC Grant 682733, CHILDROBOT) Prague, November 2016 Prague,
Major Project SSAD. Mentor : Raghudeep SSAD Mentor :Manish Jha Group : Group20 Members : Harshit Daga ( ) Aman Saxena ( )
 Aman Saxena ( )") Major Project SSAD Advisor : Dr. Kamalakar Karlapalem Mentor : Raghudeep SSAD Mentor :Manish Jha Group : Group20 Members : Harshit Daga (200801028) Aman Saxena (200801010) We were supposed to calculate
Major Project SSAD Advisor : Dr. Kamalakar Karlapalem Mentor : Raghudeep SSAD Mentor :Manish Jha Group : Group20 Members : Harshit Daga (200801028) Aman Saxena (200801010) We were supposed to calculate
Relationship to theory: This activity involves the motion of bodies under constant velocity.
 UNIFORM MOTION Lab format: this lab is a remote lab activity Relationship to theory: This activity involves the motion of bodies under constant velocity. LEARNING OBJECTIVES Read and understand these instructions
UNIFORM MOTION Lab format: this lab is a remote lab activity Relationship to theory: This activity involves the motion of bodies under constant velocity. LEARNING OBJECTIVES Read and understand these instructions
Manga (Level 1) Course Title: Manga (Level 1) Age Group: 12-18
 Course Title: Manga (Level 1) Age Group: 12-18") Manga (Level 1) Course Title: Manga (Level 1) Age Group: 12-18 Tutor: Rachel Hamel Tutor s Phone No. Cost : 800 AED 0567142185 Day / Date: Start time: End time: No. Weeks: Hours: Material Fee: Monday 3.30pm
Manga (Level 1) Course Title: Manga (Level 1) Age Group: 12-18 Tutor: Rachel Hamel Tutor s Phone No. Cost : 800 AED 0567142185 Day / Date: Start time: End time: No. Weeks: Hours: Material Fee: Monday 3.30pm
1 Robots. Unit. Pre-Reading Activity. 1. What kinds of things would you like to have a robot do for you? 2. How can a robot be useful in a school?
 Unit 1 Robots Pre-Reading Activity Discuss these questions. 1. What kinds of things would you like to have a robot do for you? 2. How can a robot be useful in a school? 1 5 Track R eading 1 10 15 20 25
Unit 1 Robots Pre-Reading Activity Discuss these questions. 1. What kinds of things would you like to have a robot do for you? 2. How can a robot be useful in a school? 1 5 Track R eading 1 10 15 20 25
Hour of Code at Box Island! Curriculum
 Hour of Code at Box Island! Curriculum Welcome to the Box Island curriculum! First of all, we want to thank you for showing interest in using this game with your children or students. Coding is becoming
Hour of Code at Box Island! Curriculum Welcome to the Box Island curriculum! First of all, we want to thank you for showing interest in using this game with your children or students. Coding is becoming
ATLAS. High Mobility, Humanoid Robot ROBOT 17 ALLSTARS -
 ATLAS High Mobility, Humanoid Robot Position: High Mobility, Humanoid Robot ATLAS Coach: Marc Raibert Stats: High mobility, humanoid robot designed to negotiate outdoor, rough terrain; Atlas can walk bipedally,
ATLAS High Mobility, Humanoid Robot Position: High Mobility, Humanoid Robot ATLAS Coach: Marc Raibert Stats: High mobility, humanoid robot designed to negotiate outdoor, rough terrain; Atlas can walk bipedally,
Implementation of Face Detection and Recognition of Indonesian Language in Communication Between Humans and Robots
 2016 International Conference on Information, Communication Technology and System (ICTS) Implementation of Face Detection and Recognition of Indonesian Language in Communication Between Humans and Robots
2016 International Conference on Information, Communication Technology and System (ICTS) Implementation of Face Detection and Recognition of Indonesian Language in Communication Between Humans and Robots
CS8678_L1. Course Introduction. CS 8678 Introduction to Robotics & AI Dr. Ken Hoganson. Start Momentarily
 Class Will CS8678_L1 Course Introduction CS 8678 Introduction to Robotics & AI Dr. Ken Hoganson Start Momentarily Contents Overview of syllabus (insert from web site) Description Textbook Mindstorms NXT
Class Will CS8678_L1 Course Introduction CS 8678 Introduction to Robotics & AI Dr. Ken Hoganson Start Momentarily Contents Overview of syllabus (insert from web site) Description Textbook Mindstorms NXT
EFFICIENT ATTENDANCE MANAGEMENT SYSTEM USING FACE DETECTION AND RECOGNITION
 EFFICIENT ATTENDANCE MANAGEMENT SYSTEM USING FACE DETECTION AND RECOGNITION 1 Arun.A.V, 2 Bhatath.S, 3 Chethan.N, 4 Manmohan.C.M, 5 Hamsaveni M 1,2,3,4,5 Department of Computer Science and Engineering,
EFFICIENT ATTENDANCE MANAGEMENT SYSTEM USING FACE DETECTION AND RECOGNITION 1 Arun.A.V, 2 Bhatath.S, 3 Chethan.N, 4 Manmohan.C.M, 5 Hamsaveni M 1,2,3,4,5 Department of Computer Science and Engineering,
in the New Zealand Curriculum
 Technology in the New Zealand Curriculum We ve revised the Technology learning area to strengthen the positioning of digital technologies in the New Zealand Curriculum. The goal of this change is to ensure
Technology in the New Zealand Curriculum We ve revised the Technology learning area to strengthen the positioning of digital technologies in the New Zealand Curriculum. The goal of this change is to ensure
HUMAN COMPUTER INTERFACE
 HUMAN COMPUTER INTERFACE TARUNIM SHARMA Department of Computer Science Maharaja Surajmal Institute C-4, Janakpuri, New Delhi, India ABSTRACT-- The intention of this paper is to provide an overview on the
HUMAN COMPUTER INTERFACE TARUNIM SHARMA Department of Computer Science Maharaja Surajmal Institute C-4, Janakpuri, New Delhi, India ABSTRACT-- The intention of this paper is to provide an overview on the
Years 9 and 10 standard elaborations Australian Curriculum: Digital Technologies
 Purpose The standard elaborations (SEs) provide additional clarity when using the Australian Curriculum achievement standard to make judgments on a five-point scale. They can be used as a tool for: making
Purpose The standard elaborations (SEs) provide additional clarity when using the Australian Curriculum achievement standard to make judgments on a five-point scale. They can be used as a tool for: making
A Lego-Based Soccer-Playing Robot Competition For Teaching Design
 Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
Session 2620 A Lego-Based Soccer-Playing Robot Competition For Teaching Design Ronald A. Lessard Norwich University Abstract Course Objectives in the ME382 Instrumentation Laboratory at Norwich University
Week-1 [8/29, 31, 9/2]: Introduction, Discussion of Lab Platforms (Jetson)
![Week-1 [8/29, 31, 9/2]: Introduction, Discussion of Lab Platforms (Jetson)](/thumbs/80/81981448.jpg "Week-1 [8/29, 31, 9/2]: Introduction, Discussion of Lab Platforms (Jetson)") CS415, Human Computer Interactive Systems Course Description: This course is an introduction to human computer interaction, graphical user interfaces, interactive systems and devices, use of user interface
CS415, Human Computer Interactive Systems Course Description: This course is an introduction to human computer interaction, graphical user interfaces, interactive systems and devices, use of user interface
PORTFOLIO ACTIVITIES 2012 / 2013
 PORTFOLIO ACTIVITIES 2012 / 2013 US UPDATED AUGUST 2012 TABLE OF CONTENTS INTRODUCTION...1 PORTFOLIO ACTIVITY 1: CREATING YOUR PERSONAL PORTFOLIO...2 PORTFOLIO ACTIVITY 2: SAVING YOUR CAREER MATCHMAKER
PORTFOLIO ACTIVITIES 2012 / 2013 US UPDATED AUGUST 2012 TABLE OF CONTENTS INTRODUCTION...1 PORTFOLIO ACTIVITY 1: CREATING YOUR PERSONAL PORTFOLIO...2 PORTFOLIO ACTIVITY 2: SAVING YOUR CAREER MATCHMAKER
Mediasite Desktop Recorder: Recording a Lecture 2017
 Mediasite Desktop Recorder: Recording a Lecture 2017 This lesson will show you how to record a presentation using the Mediasite Desktop Recorder. In browser go to - https://http://mediasite.umaryland.edu/mediasite/mymediasite
Mediasite Desktop Recorder: Recording a Lecture 2017 This lesson will show you how to record a presentation using the Mediasite Desktop Recorder. In browser go to - https://http://mediasite.umaryland.edu/mediasite/mymediasite
Winthrop Primary School
 Winthrop Primary School Information Communication Technology Plan & Scope and Sequence (DRAFT) 2015 2016 Aim: To integrate across all Australian Curriculum learning areas. Classroom teachers delivering
Winthrop Primary School Information Communication Technology Plan & Scope and Sequence (DRAFT) 2015 2016 Aim: To integrate across all Australian Curriculum learning areas. Classroom teachers delivering
PELLISSIPPI STATE COMMUNITY COLLEGE MASTER SYLLABUS AUTOCAD FOR INTERIOR DESIGN: STUDIO IV IDT 2305
 PELLISSIPPI STATE COMMUNITY COLLEGE MASTER SYLLABUS AUTOCAD FOR INTERIOR DESIGN: STUDIO IV IDT 2305 Class Hours: 3 Credit Hours: 4 Laboratory Hours: 3 Date Revised: Spring 2011 NOTE: This course is designed
PELLISSIPPI STATE COMMUNITY COLLEGE MASTER SYLLABUS AUTOCAD FOR INTERIOR DESIGN: STUDIO IV IDT 2305 Class Hours: 3 Credit Hours: 4 Laboratory Hours: 3 Date Revised: Spring 2011 NOTE: This course is designed
Introduction to Human Computer Interaction
 Introduction to Human Computer Interaction Course on NPTEL, Spring 2018 Week 1 Ponnurangam Kumaraguru ( PK ) Associate Professor ACM Distinguished & TEDx Speaker Linkedin/in/ponguru/ fb/ponnurangam.kumaraguru,
Introduction to Human Computer Interaction Course on NPTEL, Spring 2018 Week 1 Ponnurangam Kumaraguru ( PK ) Associate Professor ACM Distinguished & TEDx Speaker Linkedin/in/ponguru/ fb/ponnurangam.kumaraguru,
Program.
 Program Introduction S TE AM www.kiditech.org About Kiditech In Kiditech's mighty world, we coach, play and celebrate an innovative technology program: K-12 STEAM. We gather at Kiditech to learn and have
Program Introduction S TE AM www.kiditech.org About Kiditech In Kiditech's mighty world, we coach, play and celebrate an innovative technology program: K-12 STEAM. We gather at Kiditech to learn and have
Autism and Nao: It s a Very Compelling Device
 Autism and Nao: It s a Very Compelling Device Re-published with permission from Family Center on Technology and Disability Technology Voices October 2010 Autism and Nao: It s a Very Compelling Device An
Autism and Nao: It s a Very Compelling Device Re-published with permission from Family Center on Technology and Disability Technology Voices October 2010 Autism and Nao: It s a Very Compelling Device An
An Introduction to ScratchJr
 An Introduction to ScratchJr In recent years there has been a pro liferation of educational apps and games, full of flashy graphics and engaging music, for young children. But many of these educational
An Introduction to ScratchJr In recent years there has been a pro liferation of educational apps and games, full of flashy graphics and engaging music, for young children. But many of these educational
PELLISSIPPI STATE TECHNICAL COMMUNITY COLLEGE MASTER SYLLABUS. FUNDAMENTALS OF TECHNICAL DRAWING W/LAB CID 1100 (formerly CID 1104)
") PELLISSIPPI STATE TECHNICAL COMMUNITY COLLEGE MASTER SYLLABUS FUNDAMENTALS OF TECHNICAL DRAWING W/LAB CID 1100 (formerly CID 1104) Class Hours: 3.0 Credit Hours: 3.0 Laboratory Hours: 3.0 Revised: Spring
PELLISSIPPI STATE TECHNICAL COMMUNITY COLLEGE MASTER SYLLABUS FUNDAMENTALS OF TECHNICAL DRAWING W/LAB CID 1100 (formerly CID 1104) Class Hours: 3.0 Credit Hours: 3.0 Laboratory Hours: 3.0 Revised: Spring
ROBOTC: Programming for All Ages
 z ROBOTC: Programming for All Ages ROBOTC: Programming for All Ages ROBOTC is a C-based, robot-agnostic programming IDEA IN BRIEF language with a Windows environment for writing and debugging programs.
z ROBOTC: Programming for All Ages ROBOTC: Programming for All Ages ROBOTC is a C-based, robot-agnostic programming IDEA IN BRIEF language with a Windows environment for writing and debugging programs.
Hydro Mechanics & Water Resources Engineering. Water. Management PTPG IV - Semester. PTPG IV - Semester Pre stressed Concrete
 Date and Day Pre stressed UNIVERSITY COLLEGE OF ENGINEERING (Autonomous) OSMANIA UNIVERSITY M. E. (Civil) ( & ) and IV-Semester () Main Examination September 2012 EXAMINATION TIME TABLE Structural Prestressed
Date and Day Pre stressed UNIVERSITY COLLEGE OF ENGINEERING (Autonomous) OSMANIA UNIVERSITY M. E. (Civil) ( & ) and IV-Semester () Main Examination September 2012 EXAMINATION TIME TABLE Structural Prestressed
Getting started 1 System Requirements... 1 Software Installation... 2 Hardware Installation... 2 System Limitations and Tips on Scanning...
 Contents Getting started 1 System Requirements......................... 1 Software Installation......................... 2 Hardware Installation........................ 2 System Limitations and Tips on
Contents Getting started 1 System Requirements......................... 1 Software Installation......................... 2 Hardware Installation........................ 2 System Limitations and Tips on
PAINTING AND PRINTMAKING, BACHELOR OF FINE ARTS (B.F.A.)
") Painting and Printmaking, Bachelor of Fine Arts (B.F.A.) 1 PAINTING AND PRINTMAKING, BACHELOR OF FINE ARTS (B.F.A.) Faculty and students in the Department of Painting and Printmaking work together in a
Painting and Printmaking, Bachelor of Fine Arts (B.F.A.) 1 PAINTING AND PRINTMAKING, BACHELOR OF FINE ARTS (B.F.A.) Faculty and students in the Department of Painting and Printmaking work together in a
Robot: icub This humanoid helps us study the brain
 ProfileArticle Robot: icub This humanoid helps us study the brain For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-icub/ Program By Robohub Tuesday,
ProfileArticle Robot: icub This humanoid helps us study the brain For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-icub/ Program By Robohub Tuesday,
How to use Photo Story 3
 How to use Photo Story 3 Photo Story 3 helps you to make digital stories on the computer using photos (or other images), text and sound. You can record your voice and write your own text. You can also
How to use Photo Story 3 Photo Story 3 helps you to make digital stories on the computer using photos (or other images), text and sound. You can record your voice and write your own text. You can also
Running head: THE IMPACT OF COMPUTER ENGINEERING 1
 Running head: THE IMPACT OF COMPUTER ENGINEERING 1 The Impact of Computer Engineering Oakland University Andrew Nassif 11/21/2015 THE IMPACT OF COMPUTER ENGINEERING 2 Abstract The purpose of this paper
Running head: THE IMPACT OF COMPUTER ENGINEERING 1 The Impact of Computer Engineering Oakland University Andrew Nassif 11/21/2015 THE IMPACT OF COMPUTER ENGINEERING 2 Abstract The purpose of this paper
Knowledge Representation and Cognition in Natural Language Processing
 Knowledge Representation and Cognition in Natural Language Processing Gemignani Guglielmo Sapienza University of Rome January 17 th 2013 The European Projects Surveyed the FP6 and FP7 projects involving
Knowledge Representation and Cognition in Natural Language Processing Gemignani Guglielmo Sapienza University of Rome January 17 th 2013 The European Projects Surveyed the FP6 and FP7 projects involving
Get the Max out of Your Autodesk Architectural Desktop Drawings in Autodesk VIZ
 11/30/2005-5:00 pm - 6:30 pm Room:S. Hemispheres (Salon 4) [Lab] (Dolphin) Walt Disney World Swan and Dolphin Resort Orlando, Florida Get the Max out of Your Autodesk Architectural Desktop Drawings in
11/30/2005-5:00 pm - 6:30 pm Room:S. Hemispheres (Salon 4) [Lab] (Dolphin) Walt Disney World Swan and Dolphin Resort Orlando, Florida Get the Max out of Your Autodesk Architectural Desktop Drawings in
Mindfulness in the 21 st Century Classroom Site-based Participant Syllabus
 Mindfulness in the 21 st Century Classroom Course Description This course is designed to give educators at all levels an overview of recent research on mindfulness practices and to provide step-by-step
Mindfulness in the 21 st Century Classroom Course Description This course is designed to give educators at all levels an overview of recent research on mindfulness practices and to provide step-by-step
This list supersedes the one published in the November 2002 issue of CR.
 PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
PERIODICALS RECEIVED This is the current list of periodicals received for review in Reviews. International standard serial numbers (ISSNs) are provided to facilitate obtaining copies of articles or subscriptions.
Instructor-added questions in Teaching Survey System. Instructions for selecting and customizing your survey
 http://www.teaching.pitt.edu/omet/ Instructor-added questions in Teaching Survey System Instructions for selecting and customizing your survey This document outlines the steps for selecting, creating and
http://www.teaching.pitt.edu/omet/ Instructor-added questions in Teaching Survey System Instructions for selecting and customizing your survey This document outlines the steps for selecting, creating and
Efficient Use of Robots in the Undergraduate Curriculum
 Efficient Use of Robots in the Undergraduate Curriculum Judith Challinger California State University, Chico 400 West First Street Chico, CA 95929 (530) 898-6347 judyc@ecst.csuchico.edu ABSTRACT In this
Efficient Use of Robots in the Undergraduate Curriculum Judith Challinger California State University, Chico 400 West First Street Chico, CA 95929 (530) 898-6347 judyc@ecst.csuchico.edu ABSTRACT In this
Appendices master s degree programme Artificial Intelligence
 Appendices master s degree programme Artificial Intelligence 2015-2016 Appendix I Teaching outcomes of the degree programme (art. 1.3) 1. The master demonstrates knowledge, understanding and the ability
Appendices master s degree programme Artificial Intelligence 2015-2016 Appendix I Teaching outcomes of the degree programme (art. 1.3) 1. The master demonstrates knowledge, understanding and the ability
Meet Pepper. Because of this, Pepper will truly change the way we live our lives.
 PRESS KIT Meet Pepper Pepper is a humanoid robot, engaging, surprising and above all kind. Pepper is the first emotional robot. He was not designed for an industrial function, rather to be a true companion
PRESS KIT Meet Pepper Pepper is a humanoid robot, engaging, surprising and above all kind. Pepper is the first emotional robot. He was not designed for an industrial function, rather to be a true companion
Geo-Located Content in Virtual and Augmented Reality
 Technical Disclosure Commons Defensive Publications Series October 02, 2017 Geo-Located Content in Virtual and Augmented Reality Thomas Anglaret Follow this and additional works at: http://www.tdcommons.org/dpubs_series
Technical Disclosure Commons Defensive Publications Series October 02, 2017 Geo-Located Content in Virtual and Augmented Reality Thomas Anglaret Follow this and additional works at: http://www.tdcommons.org/dpubs_series
Introduction to Talking Robots
 Introduction to Talking Robots Graham Wilcock Adjunct Professor, Docent Emeritus University of Helsinki 20.9.2016 1 Walking and Talking Graham Wilcock 20.9.2016 2 Choregraphe Box Libraries Animations Breath,
Introduction to Talking Robots Graham Wilcock Adjunct Professor, Docent Emeritus University of Helsinki 20.9.2016 1 Walking and Talking Graham Wilcock 20.9.2016 2 Choregraphe Box Libraries Animations Breath,
ECE 396 Senior Design I
 ECE 396 Senior Design I Spring 2012 Semester Lecture 1 Introduction to Senior Design Instructor: Dr. Vahe Caliskan vahe@uic.edu http://www.uic.edu/~vahe This course teaches: Engineering design Project
ECE 396 Senior Design I Spring 2012 Semester Lecture 1 Introduction to Senior Design Instructor: Dr. Vahe Caliskan vahe@uic.edu http://www.uic.edu/~vahe This course teaches: Engineering design Project
INFORMATION & COMMUNICATION TECHNOLOGIES CLASSROOM TECHNOLOGY
 INFORMATION & COMMUNICATION TECHNOLOGIES CLASSROOM TECHNOLOGY INTRODUCTION TO PANOPTO FOR WINDOWS PANOPTO INTEGRATION WITH CANVAS Ge#ng Started A bonus with Panopto is that it can be integrated into Canvas
INFORMATION & COMMUNICATION TECHNOLOGIES CLASSROOM TECHNOLOGY INTRODUCTION TO PANOPTO FOR WINDOWS PANOPTO INTEGRATION WITH CANVAS Ge#ng Started A bonus with Panopto is that it can be integrated into Canvas
ME Advanced Manufacturing Technologies Robot Usage and Commands Summary
 ME 447 - Advanced Manufacturing Technologies Robot Usage and Commands Summary Start-up and Safety This guide is written to help you safely and effectively utilize the CRS robots to complete your labs and
ME 447 - Advanced Manufacturing Technologies Robot Usage and Commands Summary Start-up and Safety This guide is written to help you safely and effectively utilize the CRS robots to complete your labs and
SIMULATION MODELING WITH ARTIFICIAL REALITY TECHNOLOGY (SMART): AN INTEGRATION OF VIRTUAL REALITY AND SIMULATION MODELING
: AN INTEGRATION OF VIRTUAL REALITY AND SIMULATION MODELING") Proceedings of the 1998 Winter Simulation Conference D.J. Medeiros, E.F. Watson, J.S. Carson and M.S. Manivannan, eds. SIMULATION MODELING WITH ARTIFICIAL REALITY TECHNOLOGY (SMART): AN INTEGRATION OF
Proceedings of the 1998 Winter Simulation Conference D.J. Medeiros, E.F. Watson, J.S. Carson and M.S. Manivannan, eds. SIMULATION MODELING WITH ARTIFICIAL REALITY TECHNOLOGY (SMART): AN INTEGRATION OF
Master Artificial Intelligence
 Master Artificial Intelligence Appendix I Teaching outcomes of the degree programme (art. 1.3) 1. The master demonstrates knowledge, understanding and the ability to evaluate, analyze and interpret relevant
Master Artificial Intelligence Appendix I Teaching outcomes of the degree programme (art. 1.3) 1. The master demonstrates knowledge, understanding and the ability to evaluate, analyze and interpret relevant
Drafting and Design 1A
 Syllabus Drafting and Design 1A Overview This one-semester course is intended as a practical, hands-on guide to help you understand the various techniques, standards, and tools used in drafting and design.
Syllabus Drafting and Design 1A Overview This one-semester course is intended as a practical, hands-on guide to help you understand the various techniques, standards, and tools used in drafting and design.
Asher Career Values Survey
 Asher Career Values Survey What are your career values? Many times a person s career values are latent, right under the surface, ready to come out. The following series of questions is designed to elucidate
Asher Career Values Survey What are your career values? Many times a person s career values are latent, right under the surface, ready to come out. The following series of questions is designed to elucidate
PHOTOGRAPHY Course Descriptions and Outcomes
 PHOTOGRAPHY Course Descriptions and Outcomes PH 2000 Photography 1 3 cr. This class introduces students to important ideas and work from the history of photography as a means of contextualizing and articulating
PHOTOGRAPHY Course Descriptions and Outcomes PH 2000 Photography 1 3 cr. This class introduces students to important ideas and work from the history of photography as a means of contextualizing and articulating
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Introduction to HCI. CS4HC3 / SE4HC3/ SE6DO3 Fall Instructor: Kevin Browne
 Introduction to HCI CS4HC3 / SE4HC3/ SE6DO3 Fall 2011 Instructor: Kevin Browne brownek@mcmaster.ca Slide content is based heavily on Chapter 1 of the textbook: Designing the User Interface: Strategies
Introduction to HCI CS4HC3 / SE4HC3/ SE6DO3 Fall 2011 Instructor: Kevin Browne brownek@mcmaster.ca Slide content is based heavily on Chapter 1 of the textbook: Designing the User Interface: Strategies
Welcome to Math Journaling!
 Created by Maggie at www.maggieskindercorner.blogspot.com Welcome to Math Journaling! Read each prompt, or have a student helper to tell the prompt to their neighbors. Students should say the number then
Created by Maggie at www.maggieskindercorner.blogspot.com Welcome to Math Journaling! Read each prompt, or have a student helper to tell the prompt to their neighbors. Students should say the number then
Incoming First Years - Information for Parents and Students on Optional Subjects 8 Feb 2011
 Incoming First Years - Information for Parents and Students on Optional Subjects 8 Feb 2011 Junior Cycle - Subject Choice Core subjects are the subjects that all students take & Optional Subjects are the
Incoming First Years - Information for Parents and Students on Optional Subjects 8 Feb 2011 Junior Cycle - Subject Choice Core subjects are the subjects that all students take & Optional Subjects are the
ND STL Standards & Benchmarks Time Planned Activities
 MISO3 Number: 10094 School: North Border - Pembina Course Title: Foundations of Technology 9-12 (Applying Tech) Instructor: Travis Bennett School Year: 2016-2017 Course Length: 18 weeks Unit Titles ND
MISO3 Number: 10094 School: North Border - Pembina Course Title: Foundations of Technology 9-12 (Applying Tech) Instructor: Travis Bennett School Year: 2016-2017 Course Length: 18 weeks Unit Titles ND
CRAFTING A RESEARCH PROPOSAL
 CRAFTING A RESEARCH PROPOSAL Research proposals follow a set format. Proposal writing is its own genre, and just like you wouldn t write a short story and wait to introduce the main character until the
CRAFTING A RESEARCH PROPOSAL Research proposals follow a set format. Proposal writing is its own genre, and just like you wouldn t write a short story and wait to introduce the main character until the
Humanoid Robot NAO: Developing Behaviors for Football Humanoid Robots
 Humanoid Robot NAO: Developing Behaviors for Football Humanoid Robots State of the Art Presentation Luís Miranda Cruz Supervisors: Prof. Luis Paulo Reis Prof. Armando Sousa Outline 1. Context 1.1. Robocup
Humanoid Robot NAO: Developing Behaviors for Football Humanoid Robots State of the Art Presentation Luís Miranda Cruz Supervisors: Prof. Luis Paulo Reis Prof. Armando Sousa Outline 1. Context 1.1. Robocup
THE UNITED STATES PATENT AND TRADEMARK OFFICE S PARTNERSHIP WITH THE NATIONAL INVENTORS HALL OF FAME
 Technology and Innovation, Vol. 19, pp. 639-643, 2018 Printed in the USA. All rights reserved. Copyright 2018 National Academy of Inventors. ISSN 1949-8241 E-ISSN 1949-825X http://dx.doi.org/10.21300/19.3.2018.639
Technology and Innovation, Vol. 19, pp. 639-643, 2018 Printed in the USA. All rights reserved. Copyright 2018 National Academy of Inventors. ISSN 1949-8241 E-ISSN 1949-825X http://dx.doi.org/10.21300/19.3.2018.639
SWITCH & GLITCH: Tutorial
 SWITCH & GLITCH: Tutorial ADDITIONAL TASKS Robot Play a) Pair up with a classmate! b) Decide which one of you is the robot and which one the programmer. c) The programmer gives specific instructions to
SWITCH & GLITCH: Tutorial ADDITIONAL TASKS Robot Play a) Pair up with a classmate! b) Decide which one of you is the robot and which one the programmer. c) The programmer gives specific instructions to
Virtual Reality Calendar Tour Guide
 Technical Disclosure Commons Defensive Publications Series October 02, 2017 Virtual Reality Calendar Tour Guide Walter Ianneo Follow this and additional works at: http://www.tdcommons.org/dpubs_series
Technical Disclosure Commons Defensive Publications Series October 02, 2017 Virtual Reality Calendar Tour Guide Walter Ianneo Follow this and additional works at: http://www.tdcommons.org/dpubs_series
Watershed Sciences 4930 & 6920 GEOGRAPHIC INFORMATION SYSTEMS
 Slides by Wheaton et al. (2009-2014) are licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License Watershed Sciences 4930 & 6920 GEOGRAPHIC INFORMATION SYSTEMS INTRODUCTION
Slides by Wheaton et al. (2009-2014) are licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License Watershed Sciences 4930 & 6920 GEOGRAPHIC INFORMATION SYSTEMS INTRODUCTION
DOWNLOAD OR READ : GETTING STARTED ON GETTING WELL A WORKBOOK TO ACCOMPANY THE VIDEOS PDF EBOOK EPUB MOBI
 DOWNLOAD OR READ : GETTING STARTED ON GETTING WELL A WORKBOOK TO ACCOMPANY THE VIDEOS PDF EBOOK EPUB MOBI Page 1 Page 2 getting started on getting well a workbook to accompany the videos getting started
DOWNLOAD OR READ : GETTING STARTED ON GETTING WELL A WORKBOOK TO ACCOMPANY THE VIDEOS PDF EBOOK EPUB MOBI Page 1 Page 2 getting started on getting well a workbook to accompany the videos getting started
TracDat V.5: How To AY University of Hartford. Program Student-Learning Outcome Assessment
 TracDat V.5: How To AY 2105-2016 University of Hartford Program Student-Learning Outcome Assessment The University of Hartford uses the software, TracDat V.5, for managing, tracking, and reporting on the
TracDat V.5: How To AY 2105-2016 University of Hartford Program Student-Learning Outcome Assessment The University of Hartford uses the software, TracDat V.5, for managing, tracking, and reporting on the
Home-Care Technology for Independent Living
 Independent LifeStyle Assistant Home-Care Technology for Independent Living A NIST Advanced Technology Program Wende Dewing, PhD Human-Centered Systems Information and Decision Technologies Honeywell Laboratories
Independent LifeStyle Assistant Home-Care Technology for Independent Living A NIST Advanced Technology Program Wende Dewing, PhD Human-Centered Systems Information and Decision Technologies Honeywell Laboratories
RASim Prototype User Manual
 7 th Framework Programme This project has received funding from the European Union s Seventh Framework Programme for research, technological development and demonstration under grant agreement no 610425
7 th Framework Programme This project has received funding from the European Union s Seventh Framework Programme for research, technological development and demonstration under grant agreement no 610425
CONTACT: , ROBOTIC BASED PROJECTS
 ROBOTIC BASED PROJECTS 1. ADVANCED ROBOTIC PICK AND PLACE ARM AND HAND SYSTEM 2. AN ARTIFICIAL LAND MARK DESIGN BASED ON MOBILE ROBOT LOCALIZATION AND NAVIGATION 3. ANDROID PHONE ACCELEROMETER SENSOR BASED
ROBOTIC BASED PROJECTS 1. ADVANCED ROBOTIC PICK AND PLACE ARM AND HAND SYSTEM 2. AN ARTIFICIAL LAND MARK DESIGN BASED ON MOBILE ROBOT LOCALIZATION AND NAVIGATION 3. ANDROID PHONE ACCELEROMETER SENSOR BASED
INTELLIGENT GUIDANCE IN A VIRTUAL UNIVERSITY
 INTELLIGENT GUIDANCE IN A VIRTUAL UNIVERSITY T. Panayiotopoulos,, N. Zacharis, S. Vosinakis Department of Computer Science, University of Piraeus, 80 Karaoli & Dimitriou str. 18534 Piraeus, Greece themisp@unipi.gr,
INTELLIGENT GUIDANCE IN A VIRTUAL UNIVERSITY T. Panayiotopoulos,, N. Zacharis, S. Vosinakis Department of Computer Science, University of Piraeus, 80 Karaoli & Dimitriou str. 18534 Piraeus, Greece themisp@unipi.gr,
What topic do you want to hear about? A bilingual talking robot using English and Japanese Wikipedias
 What topic do you want to hear about? A bilingual talking robot using English and Japanese Wikipedias Graham Wilcock CDM Interact, Finland University of Helsinki, Finland gw@cdminteract.com Kristiina Jokinen
What topic do you want to hear about? A bilingual talking robot using English and Japanese Wikipedias Graham Wilcock CDM Interact, Finland University of Helsinki, Finland gw@cdminteract.com Kristiina Jokinen
Game Artificial Intelligence ( CS 4731/7632 )
") Game Artificial Intelligence ( CS 4731/7632 ) Instructor: Stephen Lee-Urban http://www.cc.gatech.edu/~surban6/2018-gameai/ (soon) Piazza T-square What s this all about? Industry standard approaches to
Game Artificial Intelligence ( CS 4731/7632 ) Instructor: Stephen Lee-Urban http://www.cc.gatech.edu/~surban6/2018-gameai/ (soon) Piazza T-square What s this all about? Industry standard approaches to
Analyze the Question Type
 Completing Writing Tasks Lesson 6 Unlocking the Prompt Question Type Extended Response Question Strategy & Standard Unlocking the Prompt: W.2 Write informative/explanatory texts to examine and convey complex
Completing Writing Tasks Lesson 6 Unlocking the Prompt Question Type Extended Response Question Strategy & Standard Unlocking the Prompt: W.2 Write informative/explanatory texts to examine and convey complex
MOBILE BASED HEALTHCARE MANAGEMENT USING ARTIFICIAL INTELLIGENCE
 International Journal of Computer Engineering and Applications, Volume X, Issue III, March 16 www.ijcea.com ISSN 2321-3469 ABSTRACT: MOBILE BASED HEALTHCARE MANAGEMENT USING ARTIFICIAL INTELLIGENCE Sahil
International Journal of Computer Engineering and Applications, Volume X, Issue III, March 16 www.ijcea.com ISSN 2321-3469 ABSTRACT: MOBILE BASED HEALTHCARE MANAGEMENT USING ARTIFICIAL INTELLIGENCE Sahil
Mindfulness in the 21 st Century Classroom Online Syllabus
 Mindfulness in the 21 st Century Classroom Course Description This course is designed to give educators at all levels an overview of recent research on mindfulness practices and to provide step-by-step
Mindfulness in the 21 st Century Classroom Course Description This course is designed to give educators at all levels an overview of recent research on mindfulness practices and to provide step-by-step
Saint Patrick High School Curriculum Guide: Robotics
 Saint Patrick High School Curriculum Guide: Robotics Department: Science Grade and Level: Varies Class: Robotics Term (Semester or Year): Year-long course Required Text: Additional Resources (i.e. texts,
Saint Patrick High School Curriculum Guide: Robotics Department: Science Grade and Level: Varies Class: Robotics Term (Semester or Year): Year-long course Required Text: Additional Resources (i.e. texts,
THE USE OF ARTIFICIAL INTELLIGENCE AND MACHINE LEARNING IN SPEECH RECOGNITION. A CS Approach By Uniphore Software Systems
 THE USE OF ARTIFICIAL INTELLIGENCE AND MACHINE LEARNING IN SPEECH RECOGNITION A CS Approach By Uniphore Software Systems Communicating with machines something that was near unthinkable in the past is today
THE USE OF ARTIFICIAL INTELLIGENCE AND MACHINE LEARNING IN SPEECH RECOGNITION A CS Approach By Uniphore Software Systems Communicating with machines something that was near unthinkable in the past is today
In cooperative robotics, the group of robots have the same goals, and thus it is
 Brian Bairstow 16.412 Problem Set #1 Part A: Cooperative Robotics In cooperative robotics, the group of robots have the same goals, and thus it is most efficient if they work together to achieve those
Brian Bairstow 16.412 Problem Set #1 Part A: Cooperative Robotics In cooperative robotics, the group of robots have the same goals, and thus it is most efficient if they work together to achieve those
Engineering, & Mathematics
 8O260 Applied Mathematics for Technical Professionals (R) 1 credit Gr: 10-12 Prerequisite: Recommended prerequisites: Algebra I and Geometry Description: (SGHS only) Applied Mathematics for Technical Professionals
8O260 Applied Mathematics for Technical Professionals (R) 1 credit Gr: 10-12 Prerequisite: Recommended prerequisites: Algebra I and Geometry Description: (SGHS only) Applied Mathematics for Technical Professionals
Instructors. Manual GEARED. After-School Robotics Program By Haley Hanson
 Instructors GEARED UP Manual After-School Robotics Program By Haley Hanson Table of Contents Introduction 3 Before you Start 4 Program Overview 5 Proposed Timeline 6 Itemized Materials List and Sample
Instructors GEARED UP Manual After-School Robotics Program By Haley Hanson Table of Contents Introduction 3 Before you Start 4 Program Overview 5 Proposed Timeline 6 Itemized Materials List and Sample
This manual explains how to operate the KT-X bipedal humanoid robot with a PS2 gamepad controller.
 This manual explains how to operate the KT-X bipedal humanoid robot with a PS2 gamepad controller. Step : Make sure the KT-X battery is fully charged the controller programs have been uploaded into the
This manual explains how to operate the KT-X bipedal humanoid robot with a PS2 gamepad controller. Step : Make sure the KT-X battery is fully charged the controller programs have been uploaded into the
SAMPLE. Lesson 1: Introduction to Game Design
 1 ICT Gaming Essentials Lesson 1: Introduction to Game Design LESSON SKILLS KEY TERMS After completing this lesson, you will be able to: Describe the role of games in modern society (e.g., education, task
1 ICT Gaming Essentials Lesson 1: Introduction to Game Design LESSON SKILLS KEY TERMS After completing this lesson, you will be able to: Describe the role of games in modern society (e.g., education, task
360, , , , Comparing Numbers 4. Comparing Numbers (6-Digit) Comparing Numbers (6-Digit) Comparing Numbers
 Comparing Numbers (6-Digit) Comparing Numbers") 1. 2. 360,216 360,126 400,207 407,204 3. 4. Copy the sentence that is true. 348,000 is less than 384,000. 400,000 + 3,000 + 50 403,050 348,000 is greater than 384,000. 5. 6. 391,273 319,273 128,427 128,427
1. 2. 360,216 360,126 400,207 407,204 3. 4. Copy the sentence that is true. 348,000 is less than 384,000. 400,000 + 3,000 + 50 403,050 348,000 is greater than 384,000. 5. 6. 391,273 319,273 128,427 128,427
A Kinect-based 3D hand-gesture interface for 3D databases
 A Kinect-based 3D hand-gesture interface for 3D databases Abstract. The use of natural interfaces improves significantly aspects related to human-computer interaction and consequently the productivity
A Kinect-based 3D hand-gesture interface for 3D databases Abstract. The use of natural interfaces improves significantly aspects related to human-computer interaction and consequently the productivity
User Interface Software Projects
 User Interface Software Projects Assoc. Professor Donald J. Patterson INF 134 Winter 2012 The author of this work license copyright to it according to the Creative Commons Attribution-Noncommercial-Share
User Interface Software Projects Assoc. Professor Donald J. Patterson INF 134 Winter 2012 The author of this work license copyright to it according to the Creative Commons Attribution-Noncommercial-Share
AC : TECHNOLOGIES TO INTRODUCE EMBEDDED DESIGN EARLY IN ENGINEERING. Shekhar Sharad, National Instruments
 AC 2007-1697: TECHNOLOGIES TO INTRODUCE EMBEDDED DESIGN EARLY IN ENGINEERING Shekhar Sharad, National Instruments American Society for Engineering Education, 2007 Technologies to Introduce Embedded Design
AC 2007-1697: TECHNOLOGIES TO INTRODUCE EMBEDDED DESIGN EARLY IN ENGINEERING Shekhar Sharad, National Instruments American Society for Engineering Education, 2007 Technologies to Introduce Embedded Design
CAEA Enduring Ideas: Artists tell stories, both real and imagined, through visual imagery.
 CAEA 2015 Lesson/Unit Title: Comics in the Classroom Grade Level: 5 th HS (Proficient and Advanced) Lesson/Unit Overview: Create graphic narratives (aka comics) to visually tell a sequential story. Duration:
CAEA 2015 Lesson/Unit Title: Comics in the Classroom Grade Level: 5 th HS (Proficient and Advanced) Lesson/Unit Overview: Create graphic narratives (aka comics) to visually tell a sequential story. Duration:
SKETCHING THE UX: METHOD. Lesson 11 Sketching the UX: 10 plus 10 method
 User Centred Design 11 SKETCHING THE UX: 10+10 METHOD Lesson 11 Sketching the UX: 10 plus 10 method YOU NOW KNOW Software Architecture Definition, importance and examples Architectural Modeling Languages,
User Centred Design 11 SKETCHING THE UX: 10+10 METHOD Lesson 11 Sketching the UX: 10 plus 10 method YOU NOW KNOW Software Architecture Definition, importance and examples Architectural Modeling Languages,
Can Computers Think? an introduction to computer science, programming and artificial intelligence
 Can Computers Think? an introduction to computer science, programming and artificial intelligence Kristina Striegnitz and Valerie Barr striegnk@union.edu, vbarr@union.edu Union College, Schenectady, NY
Can Computers Think? an introduction to computer science, programming and artificial intelligence Kristina Striegnitz and Valerie Barr striegnk@union.edu, vbarr@union.edu Union College, Schenectady, NY
MEDIA AND INFORMATION
 MEDIA AND INFORMATION MI Department of Media and Information College of Communication Arts and Sciences 101 Understanding Media and Information Fall, Spring, Summer. 3(3-0) SA: TC 100, TC 110, TC 101 Critique
MEDIA AND INFORMATION MI Department of Media and Information College of Communication Arts and Sciences 101 Understanding Media and Information Fall, Spring, Summer. 3(3-0) SA: TC 100, TC 110, TC 101 Critique
PYBOSSA Technology. What is PYBOSSA?
 PYBOSSA Technology What is PYBOSSA? PYBOSSA is our technology, used for the development of platforms and data collection within collaborative environments, analysis and data enrichment scifabric.com 1
PYBOSSA Technology What is PYBOSSA? PYBOSSA is our technology, used for the development of platforms and data collection within collaborative environments, analysis and data enrichment scifabric.com 1
Using the Desktop Recorder
 Mediasite Using the Desktop Recorder Instructional Media publication: 09-Students 9/8/06 Introduction The new Desktop Recorder from Mediasite allows HCC users to record content on their computer desktop
Mediasite Using the Desktop Recorder Instructional Media publication: 09-Students 9/8/06 Introduction The new Desktop Recorder from Mediasite allows HCC users to record content on their computer desktop
IN5480 vildehos Høst 2018
 1. Three definitions of Ai The study of how to produce machines that have some of the qualities that the human mind has, such as the ability to understand language, recognize pictures, solve problems,
1. Three definitions of Ai The study of how to produce machines that have some of the qualities that the human mind has, such as the ability to understand language, recognize pictures, solve problems,
Module 1 Introducing Kodu Basics
 Game Making Workshop Manual Munsang College 8 th May2012 1 Module 1 Introducing Kodu Basics Introducing Kodu Game Lab Kodu Game Lab is a visual programming language that allows anyone, even those without
Game Making Workshop Manual Munsang College 8 th May2012 1 Module 1 Introducing Kodu Basics Introducing Kodu Game Lab Kodu Game Lab is a visual programming language that allows anyone, even those without
Getting Started Guide
 SOLIDWORKS Getting Started Guide SOLIDWORKS Electrical FIRST Robotics Edition Alexander Ouellet 1/2/2015 Table of Contents INTRODUCTION... 1 What is SOLIDWORKS Electrical?... Error! Bookmark not defined.
SOLIDWORKS Getting Started Guide SOLIDWORKS Electrical FIRST Robotics Edition Alexander Ouellet 1/2/2015 Table of Contents INTRODUCTION... 1 What is SOLIDWORKS Electrical?... Error! Bookmark not defined.
understanding sensors
 The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
RPG CREATOR QUICKSTART
 INTRODUCTION RPG CREATOR QUICKSTART So you've downloaded the program, opened it up, and are seeing the Engine for the first time. RPG Creator is not hard to use, but at first glance, there is so much to
INTRODUCTION RPG CREATOR QUICKSTART So you've downloaded the program, opened it up, and are seeing the Engine for the first time. RPG Creator is not hard to use, but at first glance, there is so much to
TECHNOLOGY CURRICULUM OBJECTIVES
 TECHNOLOGY CURRICULUM OBJECTIVES DIOCESE OF ARLINGTON PHILOSOPHY Advancements in our rapidly changing world necessitate the acquisition of technological skills to enable students to function in the 21st
TECHNOLOGY CURRICULUM OBJECTIVES DIOCESE OF ARLINGTON PHILOSOPHY Advancements in our rapidly changing world necessitate the acquisition of technological skills to enable students to function in the 21st