TODO add: PID material from Pont slides Some inverted pendulum videos Model-based control and other more sophisticated
|
|
|
- Samson George
- 5 years ago
- Views:
Transcription
1 TODO add: PID material from Pont slides Some inverted pendulum videos Model-based control and other more sophisticated controllers? More code speed issues perf with and w/o FP on different processors
2 Last Time Estimating worst case execution time Holistic scheduling: real-time guarantees over a CAN bus
3 Today Feedback (closed loop) control and PID controllers Principles Implementation Tuning
4 Control Systems Definitions: Desired state variables: X*(t) These are given to the system from outside E.g. room temperature should be 70 Estimated state variables: X (t) E.g. room temperature is currently 67 Estimation uses standard data acquisition techniques Actions: U(t) E.g. thermistor + ADC System commands U(t) converted into driving forces using transducers E.g. turn off the furnace
5 More Control Terms Goal of a control system is to minimize error: e(t) = X*(t) X (t) Evaluating a control system Steady-state controller error Average e(t) Transient response How long the system takes to reach 99% of the desired final value after X*(t) is changed Stability Does the system reach a steady state (smooth constant output) or does it oscillate?

6 Early Feedback Control Centrifugal governor for a throttle
7 Simple Closed Loop Example We re designing a thermostat Goal is to heat room to a set temperature We can turn the furnace on and off When furnace is off, room cools down by itself Fancy control is not needed here! Rather we just need two temperature settings T low temperature at which we turn on the furnace T high temperature at which we turn off the furnace The difference between these provides hysteresis An on/off ( bang bang ) controller works well when the physical system is slow to respond What happens if control loop runs too fast or slow?
8 Thermostat Code int Thigh, Tlow; bool on = false; timer_interrupt_handler (void) { int T = read_adc(); if (T < Tlow &&!on) { turn_furnace_on(); on = true; } if (T > Thigh && on) { turn_furnace_off(); on = false; } }
9 Another Simple Controller We re controlling a robot arm attached to a stepper motor Need to get the arm to a certain position Position sensor tells us where the arm is Algorithm: if E > 1mm then decrement position by 1mm if E < -1mm then increment position by 1mm Pretty tough to go wrong with a strategy like this But slow to converge What happens if control loop runs too fast or slow?
10 PID Controllers Simple controllers like previous two examples work but in many real situations Respond slowly Have large errors Better answer: PID (Proportional Integral Derivative) PID equation: U ( t) = KPE( t) + KI E( τ ) dτ + t 0 K D de( t) dt K P, K I, and K D are design parameters Can be fixed at zero to simplify the controller
11 PID Intuition K P determines response to current error Too large Oscillation Too small Slow response Can t eliminate steady-state error K I determines response to cumulative error Can eliminate steady-state error but often makes transient response worse K D determines response to rate of change of error Damps response when error is moving in the right direction Amplifies response when error is moving in the wrong direction Can be used to increase stability and improve transient response
12 PID Loop Skeleton Code double UpdatePID (SPid *pid, double error, double position) { } position = ReadPlantADC(); drive = UpdatePID (&plantpid, plantcommand - position, position); DrivePlantDAC (drive);
13 Proportional Control double UpdatePID (SPid *pid, { } double pterm; double error, double position) pterm = pid->pgain * error; return pterm;

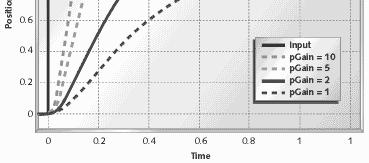
14 Example System 1


15 Example System 2 Problem: Proportional control can t always eliminate steady-state error


16 Example System 3 Problem: When there is too much actuator delay, proportional control cannot stabilize the system
17 Integral Control double iterm; pid->istate += error; if (pid->istate > pid->imax) { pid->istate = pid->imax; } else if (pid->istate < pid-> imin) { } pid->istate = pid->imin; iterm = pid->igain * istate; In practice, always used in conjunction with proportional control


18 Example 2 with PI Control Steady state error is eliminated
19 Integrator Issues Sampling time becomes more important Sampling time shouldn t vary more than 1%-5% On average, sampling should be periodic Integrator range is important Integrator windup occurs when the integrator value gets stuck too high or too low Limiting the range makes this less of a problem Reasonable heuristic: Set integrator limits to drive limits Usually, if you can t stabilize a system with proportional control, you can t stabilize it with PI control either
20 Differential Control double dterm; dterm = pid->dgain * (position - pid->dstate); pid->dstate = position; Basically just computes the slope of the system state Attempts to predict system future based on recent past history

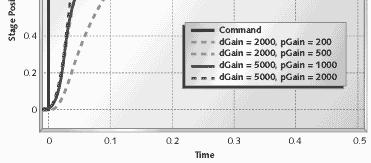
21 Example 3 with PD Control
22 Differential Issues Derivative is very sensitive to noise In practice, might keep a buffer of several samples into the past in order to smooth out noise This is just a low-pass filter Decreases responsiveness which is the point of differential control in the first place Important for sampling period to be very even Do sampling in a high-priority interrupt or thread
23 Full PID Source Code typedef struct { double dstate; // Last position input double istate; // Integrator state double imax, imin; double igain, // integral gain pgain, // proportional gain dgain; // derivative gain } SPid; double UpdatePID (SPid * pid, double error, double position) { double pterm, dterm, iterm; pterm = pid->pgain * error; pid->istate += error; if (pid->istate > pid->imax) pid->istate = pid->imax; else if (pid->istate < pid->imin) pid->istate = pid->imin; iterm = pid->igain * istate; dterm = pid->dgain * (position - pid->dstate); pid->dstate = position; return pterm + iterm - dterm; }
24 Implementation Issues Example code uses floating point Convert to integer or fixed-point by hand OR Keep using FP if the control loop frequency is low or if HW FP is available Multiplies can be avoided by selecting constants that are multiples of 2 Sampling rate Too low Slow response time Too high Differential noise and integral overflow Rule of thumb: Set sampling rate between 1/10 and 1/100 of desired settling time Difficult control problems argue for higher sampling rates
25 Tuning the Parameters Method 1: Plug system model into Matlab, it hands you the parameters Method 2: Tune by hand Happy fact: When the system is not too sensitive, control parameters only have to be roughly correct to do a good job Requirements for hand tuning: Need to be able to observe controller variables and output Need to be able to supply square-wave inputs Note: Parameters can interact in complex ways Tuning is an art Tuning by hand will be difficult if system is barely controllable System may be uncontrollable
26 Tuning Differential Gain Start here unless you can do without dgain, in which case set it to 0.0 and move to pgain Start with small proportional gain, e.g. 1.0 Start with dgain == pgain * 100 Increase dgain until unacceptable oscillation, overshoot, or noise occurs Oscillation from too much dgain is much faster than oscillation from not enough Back off by factor of 2-4 System will now be sluggish time to tune P and I
27 Tuning pgain and igain Start with a pgain around By experimentation find the value of pgain where oscillation starts Then back off by a factor of 2-4 Start with igain around Again find a value that gives reasonably good performance without causing oscillation
28 Conclusions Feedback control is a broadly useful technology for getting an embedded system to have some desired effect on the real world In practice manual tuning replaces analytic solutions However, Matlab has great support for feedback control Can generate efficient code too
1. Consider the closed loop system shown in the figure below. Select the appropriate option to implement the system shown in dotted lines using
 1. Consider the closed loop system shown in the figure below. Select the appropriate option to implement the system shown in dotted lines using op-amps a. b. c. d. Solution: b) Explanation: The dotted
1. Consider the closed loop system shown in the figure below. Select the appropriate option to implement the system shown in dotted lines using op-amps a. b. c. d. Solution: b) Explanation: The dotted
L09. PID, PURE PURSUIT
 1 L09. PID, PURE PURSUIT EECS 498-6: Autonomous Robotics Laboratory Today s Plan 2 Simple controllers Bang-bang PID Pure Pursuit 1 Control 3 Suppose we have a plan: Hey robot! Move north one meter, the
1 L09. PID, PURE PURSUIT EECS 498-6: Autonomous Robotics Laboratory Today s Plan 2 Simple controllers Bang-bang PID Pure Pursuit 1 Control 3 Suppose we have a plan: Hey robot! Move north one meter, the
Experiment 9. PID Controller
 Experiment 9 PID Controller Objective: - To be familiar with PID controller. - Noting how changing PID controller parameter effect on system response. Theory: The basic function of a controller is to execute
Experiment 9 PID Controller Objective: - To be familiar with PID controller. - Noting how changing PID controller parameter effect on system response. Theory: The basic function of a controller is to execute
6.270 Lecture. Control Systems
 6.270 Lecture Control Systems Steven Jorgensen Massachusetts Institute of Technology January 2014 Overview of Lecture Feed Forward Open Loop Controller Pros and Cons Bang-Bang Closed Loop Controller Intro
6.270 Lecture Control Systems Steven Jorgensen Massachusetts Institute of Technology January 2014 Overview of Lecture Feed Forward Open Loop Controller Pros and Cons Bang-Bang Closed Loop Controller Intro
Introduction to PID Control
 Introduction to PID Control Introduction This introduction will show you the characteristics of the each of proportional (P), the integral (I), and the derivative (D) controls, and how to use them to obtain
Introduction to PID Control Introduction This introduction will show you the characteristics of the each of proportional (P), the integral (I), and the derivative (D) controls, and how to use them to obtain
Different Controller Terms
 Loop Tuning Lab Challenges Not all PID controllers are the same. They don t all use the same units for P-I-and D. There are different types of processes. There are different final element types. There
Loop Tuning Lab Challenges Not all PID controllers are the same. They don t all use the same units for P-I-and D. There are different types of processes. There are different final element types. There
-binary sensors and actuators (such as an on/off controller) are generally more reliable and less expensive
 are generally more reliable and less expensive") Process controls are necessary for designing safe and productive plants. A variety of process controls are used to manipulate processes, however the most simple and often most effective is the PID controller.
Process controls are necessary for designing safe and productive plants. A variety of process controls are used to manipulate processes, however the most simple and often most effective is the PID controller.
PYKC 7 March 2019 EA2.3 Electronics 2 Lecture 18-1
 In this lecture, we will examine a very popular feedback controller known as the proportional-integral-derivative (PID) control method. This type of controller is widely used in industry, does not require
In this lecture, we will examine a very popular feedback controller known as the proportional-integral-derivative (PID) control method. This type of controller is widely used in industry, does not require
DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING BANGLADESH UNIVERSITY OF ENGINEERING & TECHNOLOGY EEE 402 : CONTROL SYSTEMS SESSIONAL
 DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING BANGLADESH UNIVERSITY OF ENGINEERING & TECHNOLOGY EEE 402 : CONTROL SYSTEMS SESSIONAL Experiment No. 1(a) : Modeling of physical systems and study of
DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING BANGLADESH UNIVERSITY OF ENGINEERING & TECHNOLOGY EEE 402 : CONTROL SYSTEMS SESSIONAL Experiment No. 1(a) : Modeling of physical systems and study of
MM7 Practical Issues Using PID Controllers
 MM7 Practical Issues Using PID Controllers Readings: FC textbook: Section 4.2.7 Integrator Antiwindup p.196-200 Extra reading: Hou Ming s lecture notes p.60-69 Extra reading: M.J. Willis notes on PID controler
MM7 Practical Issues Using PID Controllers Readings: FC textbook: Section 4.2.7 Integrator Antiwindup p.196-200 Extra reading: Hou Ming s lecture notes p.60-69 Extra reading: M.J. Willis notes on PID controler
Understanding PID Control
 1 of 5 2/20/01 1:15 PM Understanding PID Control Familiar examples show how and why proportional-integral-derivative controllers behave the way they do. Keywords: Process control Control theory Controllers
1 of 5 2/20/01 1:15 PM Understanding PID Control Familiar examples show how and why proportional-integral-derivative controllers behave the way they do. Keywords: Process control Control theory Controllers
International Journal of Research in Advent Technology Available Online at:
 OVERVIEW OF DIFFERENT APPROACHES OF PID CONTROLLER TUNING Manju Kurien 1, Alka Prayagkar 2, Vaishali Rajeshirke 3 1 IS Department 2 IE Department 3 EV DEpartment VES Polytechnic, Chembur,Mumbai 1 manjulibu@gmail.com
OVERVIEW OF DIFFERENT APPROACHES OF PID CONTROLLER TUNING Manju Kurien 1, Alka Prayagkar 2, Vaishali Rajeshirke 3 1 IS Department 2 IE Department 3 EV DEpartment VES Polytechnic, Chembur,Mumbai 1 manjulibu@gmail.com
Chapter 5. Tracking system with MEMS mirror
 Chapter 5 Tracking system with MEMS mirror Up to now, this project has dealt with the theoretical optimization of the tracking servo with MEMS mirror through the use of simulation models. For these models
Chapter 5 Tracking system with MEMS mirror Up to now, this project has dealt with the theoretical optimization of the tracking servo with MEMS mirror through the use of simulation models. For these models
Control and Optimization
 Control and Optimization Example Design Goals Prevent overheating Meet deadlines Save energy Design Goals Prevent overheating Meet deadlines Save energy Question: what the safety, mission, and performance
Control and Optimization Example Design Goals Prevent overheating Meet deadlines Save energy Design Goals Prevent overheating Meet deadlines Save energy Question: what the safety, mission, and performance
Balancing Robot. Daniel Bauen Brent Zeigler
 Balancing Robot Daniel Bauen Brent Zeigler December 3, 2004 Initial Plan The objective of this project was to design and fabricate a robot capable of sustaining a vertical orientation by balancing on only
Balancing Robot Daniel Bauen Brent Zeigler December 3, 2004 Initial Plan The objective of this project was to design and fabricate a robot capable of sustaining a vertical orientation by balancing on only
Closed-Loop Transportation Simulation. Outlines
 Closed-Loop Transportation Simulation Deyang Zhao Mentor: Unnati Ojha PI: Dr. Mo-Yuen Chow Aug. 4, 2010 Outlines 1 Project Backgrounds 2 Objectives 3 Hardware & Software 4 5 Conclusions 1 Project Background
Closed-Loop Transportation Simulation Deyang Zhao Mentor: Unnati Ojha PI: Dr. Mo-Yuen Chow Aug. 4, 2010 Outlines 1 Project Backgrounds 2 Objectives 3 Hardware & Software 4 5 Conclusions 1 Project Background
CSE 3215 Embedded Systems Laboratory Lab 5 Digital Control System
 Introduction CSE 3215 Embedded Systems Laboratory Lab 5 Digital Control System The purpose of this lab is to introduce you to digital control systems. The most basic function of a control system is to
Introduction CSE 3215 Embedded Systems Laboratory Lab 5 Digital Control System The purpose of this lab is to introduce you to digital control systems. The most basic function of a control system is to
CHAPTER 4 PID CONTROLLER BASED SPEED CONTROL OF THREE PHASE INDUCTION MOTOR
 36 CHAPTER 4 PID CONTROLLER BASED SPEED CONTROL OF THREE PHASE INDUCTION MOTOR 4.1 INTRODUCTION Now a day, a number of different controllers are used in the industry and in many other fields. In a quite
36 CHAPTER 4 PID CONTROLLER BASED SPEED CONTROL OF THREE PHASE INDUCTION MOTOR 4.1 INTRODUCTION Now a day, a number of different controllers are used in the industry and in many other fields. In a quite
Lab 11. Speed Control of a D.C. motor. Motor Characterization
 Lab 11. Speed Control of a D.C. motor Motor Characterization Motor Speed Control Project 1. Generate PWM waveform 2. Amplify the waveform to drive the motor 3. Measure motor speed 4. Estimate motor parameters
Lab 11. Speed Control of a D.C. motor Motor Characterization Motor Speed Control Project 1. Generate PWM waveform 2. Amplify the waveform to drive the motor 3. Measure motor speed 4. Estimate motor parameters
Lab 23 Microcomputer-Based Motor Controller
 Lab 23 Microcomputer-Based Motor Controller Page 23.1 Lab 23 Microcomputer-Based Motor Controller This laboratory assignment accompanies the book, Embedded Microcomputer Systems: Real Time Interfacing,
Lab 23 Microcomputer-Based Motor Controller Page 23.1 Lab 23 Microcomputer-Based Motor Controller This laboratory assignment accompanies the book, Embedded Microcomputer Systems: Real Time Interfacing,
Welcome to SENG 480B / CSC 485A / CSC 586A Self-Adaptive and Self-Managing Systems
 Welcome to SENG 480B / CSC 485A / CSC 586A Self-Adaptive and Self-Managing Systems Dr. Hausi A. Müller Department of Computer Science University of Victoria http://courses.seng.uvic.ca/courses/2015/summer/seng/480a
Welcome to SENG 480B / CSC 485A / CSC 586A Self-Adaptive and Self-Managing Systems Dr. Hausi A. Müller Department of Computer Science University of Victoria http://courses.seng.uvic.ca/courses/2015/summer/seng/480a
6.4 Adjusting PID Manually
 Setting Display Parameter Setting Display Operation Display > PARAMETER or PARA key for 3 seconds (to [MODE] Menu Display) > Right arrow key (to [PID] Menu Display ) > SET/ENTER key (The setting parameter
Setting Display Parameter Setting Display Operation Display > PARAMETER or PARA key for 3 seconds (to [MODE] Menu Display) > Right arrow key (to [PID] Menu Display ) > SET/ENTER key (The setting parameter
 EC6405 - CONTROL SYSTEM ENGINEERING Questions and Answers Unit - II Time Response Analysis Two marks 1. What is transient response? The transient response is the response of the system when the system
EC6405 - CONTROL SYSTEM ENGINEERING Questions and Answers Unit - II Time Response Analysis Two marks 1. What is transient response? The transient response is the response of the system when the system
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 13.11.2014
Sensors and Sensing Motors, Encoders and Motor Control
 Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
Sensors and Sensing Motors, Encoders and Motor Control Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 05.11.2015
PID Control Technical Notes
 PID Control Technical Notes General PID (Proportional-Integral-Derivative) control action allows the process control to accurately maintain setpoint by adjusting the control outputs. In this technical
PID Control Technical Notes General PID (Proportional-Integral-Derivative) control action allows the process control to accurately maintain setpoint by adjusting the control outputs. In this technical
Controller Algorithms and Tuning
 The previous sections of this module described the purpose of control, defined individual elements within control loops, and demonstrated the symbology used to represent those elements in an engineering
The previous sections of this module described the purpose of control, defined individual elements within control loops, and demonstrated the symbology used to represent those elements in an engineering
Figure 1: Unity Feedback System. The transfer function of the PID controller looks like the following:
 Islamic University of Gaza Faculty of Engineering Electrical Engineering department Control Systems Design Lab Eng. Mohammed S. Jouda Eng. Ola M. Skeik Experiment 3 PID Controller Overview This experiment
Islamic University of Gaza Faculty of Engineering Electrical Engineering department Control Systems Design Lab Eng. Mohammed S. Jouda Eng. Ola M. Skeik Experiment 3 PID Controller Overview This experiment
Uç N. MADHUSUDHANAREDDYM.Sc.,
 DESIGN AND DEVELOPMENT OF ETHERNET BASED DC MOTOR SPEED CONTROL SYSTEM USING ARM Cortex PROCESSOR AND ITS APPLICATION FOR SOLAR POWER TRACKING Thesis submitted to SRI KRISHNADEVARAYA UNIVERSITY in partial
DESIGN AND DEVELOPMENT OF ETHERNET BASED DC MOTOR SPEED CONTROL SYSTEM USING ARM Cortex PROCESSOR AND ITS APPLICATION FOR SOLAR POWER TRACKING Thesis submitted to SRI KRISHNADEVARAYA UNIVERSITY in partial
MEM380 Applied Autonomous Robots I Winter Feedback Control USARSim
 MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
MEM380 Applied Autonomous Robots I Winter 2011 Feedback Control USARSim Transforming Accelerations into Position Estimates In a perfect world It s not a perfect world. We have noise and bias in our acceleration
OVEN INDUSTRIES, INC. Model 5C7-362
 OVEN INDUSTRIES, INC. OPERATING MANUAL Model 5C7-362 THERMOELECTRIC MODULE TEMPERATURE CONTROLLER TABLE OF CONTENTS Features... 1 Description... 2 Block Diagram... 3 RS232 Communications Connections...
OVEN INDUSTRIES, INC. OPERATING MANUAL Model 5C7-362 THERMOELECTRIC MODULE TEMPERATURE CONTROLLER TABLE OF CONTENTS Features... 1 Description... 2 Block Diagram... 3 RS232 Communications Connections...
A Primer on Control Systems
 Technical Article A Primer on Control Systems By Brandon Tarr, Electro-Mechanical Design Engineer Abstract A comprehensive discussion of control system theory would best be handled not by a discrete text,
Technical Article A Primer on Control Systems By Brandon Tarr, Electro-Mechanical Design Engineer Abstract A comprehensive discussion of control system theory would best be handled not by a discrete text,
Linear Control Systems Lectures #5 - PID Controller. Guillaume Drion Academic year
 Linear Control Systems Lectures #5 - PID Controller Guillaume Drion Academic year 2018-2019 1 Outline PID controller: general form Effects of the proportional, integral and derivative actions PID tuning
Linear Control Systems Lectures #5 - PID Controller Guillaume Drion Academic year 2018-2019 1 Outline PID controller: general form Effects of the proportional, integral and derivative actions PID tuning
Loop Design. Chapter Introduction
 Chapter 8 Loop Design 8.1 Introduction This is the first Chapter that deals with design and we will therefore start by some general aspects on design of engineering systems. Design is complicated because
Chapter 8 Loop Design 8.1 Introduction This is the first Chapter that deals with design and we will therefore start by some general aspects on design of engineering systems. Design is complicated because
LECTURE 2: PD, PID, and Feedback Compensation. ( ) = + We consider various settings for Zc when compensating the system with the following RL:
 = + We consider various settings for Zc when compensating the system with the following RL:") LECTURE 2: PD, PID, and Feedback Compensation. 2.1 Ideal Derivative Compensation (PD) Generally, we want to speed up the transient response (decrease Ts and Tp). If we are lucky then a system s desired
LECTURE 2: PD, PID, and Feedback Compensation. 2.1 Ideal Derivative Compensation (PD) Generally, we want to speed up the transient response (decrease Ts and Tp). If we are lucky then a system s desired
The Discussion of this exercise covers the following points: Angular position control block diagram and fundamentals. Power amplifier 0.
 Exercise 6 Motor Shaft Angular Position Control EXERCISE OBJECTIVE When you have completed this exercise, you will be able to associate the pulses generated by a position sensing incremental encoder with
Exercise 6 Motor Shaft Angular Position Control EXERCISE OBJECTIVE When you have completed this exercise, you will be able to associate the pulses generated by a position sensing incremental encoder with
SECTION 6: ROOT LOCUS DESIGN
 SECTION 6: ROOT LOCUS DESIGN MAE 4421 Control of Aerospace & Mechanical Systems 2 Introduction Introduction 3 Consider the following unity feedback system 3 433 Assume A proportional controller Design
SECTION 6: ROOT LOCUS DESIGN MAE 4421 Control of Aerospace & Mechanical Systems 2 Introduction Introduction 3 Consider the following unity feedback system 3 433 Assume A proportional controller Design
A Fast PID Tuning Algorithm for Feed Drive Servo Loop
 American Scientific Research Journal for Engineering, Technology, and Sciences (ASRJETS) ISSN (Print) 233-440, ISSN (Online) 233-4402 Global Society of Scientific Research and Researchers http://asrjetsjournal.org/
American Scientific Research Journal for Engineering, Technology, and Sciences (ASRJETS) ISSN (Print) 233-440, ISSN (Online) 233-4402 Global Society of Scientific Research and Researchers http://asrjetsjournal.org/
A SOFTWARE-BASED GAIN SCHEDULING OF PID CONTROLLER
 A SOFTWARE-BASED GAIN SCHEDULING OF PID CONTROLLER Hussein Sarhan Department of Mechatronics Engineering, Faculty of Engineering Technology, Amman, Jordan ABSTRACT In this paper, a scheduled-gain SG-PID
A SOFTWARE-BASED GAIN SCHEDULING OF PID CONTROLLER Hussein Sarhan Department of Mechatronics Engineering, Faculty of Engineering Technology, Amman, Jordan ABSTRACT In this paper, a scheduled-gain SG-PID
CDS 101/110: Lecture 8.2 PID Control
 CDS 11/11: Lecture 8.2 PID Control November 16, 216 Goals: Nyquist Example Introduce and review PID control. Show how to use loop shaping using PID to achieve a performance specification Discuss the use
CDS 11/11: Lecture 8.2 PID Control November 16, 216 Goals: Nyquist Example Introduce and review PID control. Show how to use loop shaping using PID to achieve a performance specification Discuss the use
RWM control on EXTRAP T2R using various controller configurations.
 RWM control on EXTRAP T2R using various controller configurations. See reference [1] for details of material in this presentation P R Brunsell, K E J Olofsson, L Frassinetti, J R Drake Div. of Fusion Plasma
RWM control on EXTRAP T2R using various controller configurations. See reference [1] for details of material in this presentation P R Brunsell, K E J Olofsson, L Frassinetti, J R Drake Div. of Fusion Plasma
Design of PID Control System Assisted using LabVIEW in Biomedical Application
 Design of PID Control System Assisted using LabVIEW in Biomedical Application N. H. Ariffin *,a and N. Arsad b Department of Electrical, Electronic and Systems Engineering, Faculty of Engineering and Built
Design of PID Control System Assisted using LabVIEW in Biomedical Application N. H. Ariffin *,a and N. Arsad b Department of Electrical, Electronic and Systems Engineering, Faculty of Engineering and Built
PID-CONTROL FUNCTION AND APPLICATION
 PID-CONTROL FUNCTION AND APPLICATION Hitachi Inverters SJ1 and L1 Series Deviation - P : Proportional operation I : Integral operation D : Differential operation Inverter Frequency command Fan, pump, etc.
PID-CONTROL FUNCTION AND APPLICATION Hitachi Inverters SJ1 and L1 Series Deviation - P : Proportional operation I : Integral operation D : Differential operation Inverter Frequency command Fan, pump, etc.
5 Lab 5: Position Control Systems - Week 2
 5 Lab 5: Position Control Systems - Week 2 5.7 Introduction In this lab, you will convert the DC motor to an electromechanical positioning actuator by properly designing and implementing a proportional
5 Lab 5: Position Control Systems - Week 2 5.7 Introduction In this lab, you will convert the DC motor to an electromechanical positioning actuator by properly designing and implementing a proportional
GE423 Laboratory Assignment 6 Robot Sensors and Wall-Following
 GE423 Laboratory Assignment 6 Robot Sensors and Wall-Following Goals for this Lab Assignment: 1. Learn about the sensors available on the robot for environment sensing. 2. Learn about classical wall-following
GE423 Laboratory Assignment 6 Robot Sensors and Wall-Following Goals for this Lab Assignment: 1. Learn about the sensors available on the robot for environment sensing. 2. Learn about classical wall-following
STABILITY IMPROVEMENT OF POWER SYSTEM BY USING PSS WITH PID AVR CONTROLLER IN THE HIGH DAM POWER STATION ASWAN EGYPT
 3 rd International Conference on Energy Systems and Technologies 16 19 Feb. 2015, Cairo, Egypt STABILITY IMPROVEMENT OF POWER SYSTEM BY USING PSS WITH PID AVR CONTROLLER IN THE HIGH DAM POWER STATION ASWAN
3 rd International Conference on Energy Systems and Technologies 16 19 Feb. 2015, Cairo, Egypt STABILITY IMPROVEMENT OF POWER SYSTEM BY USING PSS WITH PID AVR CONTROLLER IN THE HIGH DAM POWER STATION ASWAN
SINGLE SENSOR LINE FOLLOWER
 SINGLE SENSOR LINE FOLLOWER One Sensor Line Following Sensor on edge of line If sensor is reading White: Robot is too far right and needs to turn left Black: Robot is too far left and needs to turn right
SINGLE SENSOR LINE FOLLOWER One Sensor Line Following Sensor on edge of line If sensor is reading White: Robot is too far right and needs to turn left Black: Robot is too far left and needs to turn right
Cantonment, Dhaka-1216, BANGLADESH
 International Conference on Mechanical, Industrial and Energy Engineering 2014 26-27 December, 2014, Khulna, BANGLADESH ICMIEE-PI-140153 Electro-Mechanical Modeling of Separately Excited DC Motor & Performance
International Conference on Mechanical, Industrial and Energy Engineering 2014 26-27 December, 2014, Khulna, BANGLADESH ICMIEE-PI-140153 Electro-Mechanical Modeling of Separately Excited DC Motor & Performance
Observer-based Engine Cooling Control System (OBCOOL) Project Proposal. Students: Andrew Fouts & Kurtis Liggett. Advisor: Dr.
 Project Proposal. Students: Andrew Fouts & Kurtis Liggett. Advisor: Dr.") Observer-based Engine Cooling Control System (OBCOOL) Project Proposal Students: Andrew Fouts & Kurtis Liggett Advisor: Dr. Gary Dempsey Date: December 09, 2010 1 Introduction Control systems exist in
Observer-based Engine Cooling Control System (OBCOOL) Project Proposal Students: Andrew Fouts & Kurtis Liggett Advisor: Dr. Gary Dempsey Date: December 09, 2010 1 Introduction Control systems exist in
Design of Compensator for Dynamical System
 Design of Compensator for Dynamical System Ms.Saroja S. Chavan PimpriChinchwad College of Engineering, Pune Prof. A. B. Patil PimpriChinchwad College of Engineering, Pune ABSTRACT New applications of dynamical
Design of Compensator for Dynamical System Ms.Saroja S. Chavan PimpriChinchwad College of Engineering, Pune Prof. A. B. Patil PimpriChinchwad College of Engineering, Pune ABSTRACT New applications of dynamical
The Embedded System. - Development and analysis of an Embedded DC-motor controller - by Embedded System Team
 The Embedded System - Development and analysis of an Embedded DC-motor controller - by Robert Eriksson Nicklas Lundin Mehiar Moukbel Ronnie Sjödin Thomas Wahlström 2E1242, Project Course Automatic Control
The Embedded System - Development and analysis of an Embedded DC-motor controller - by Robert Eriksson Nicklas Lundin Mehiar Moukbel Ronnie Sjödin Thomas Wahlström 2E1242, Project Course Automatic Control
ENGS 26 CONTROL THEORY. Thermal Control System Laboratory
 ENGS 26 CONTROL THEORY Thermal Control System Laboratory Equipment Thayer school thermal control experiment board DT2801 Data Acquisition board 2-4 BNC-banana connectors 3 Banana-Banana connectors +15
ENGS 26 CONTROL THEORY Thermal Control System Laboratory Equipment Thayer school thermal control experiment board DT2801 Data Acquisition board 2-4 BNC-banana connectors 3 Banana-Banana connectors +15
EE 4314 Lab 3 Handout Speed Control of the DC Motor System Using a PID Controller Fall Lab Information
 EE 4314 Lab 3 Handout Speed Control of the DC Motor System Using a PID Controller Fall 2012 IMPORTANT: This handout is common for all workbenches. 1. Lab Information a) Date, Time, Location, and Report
EE 4314 Lab 3 Handout Speed Control of the DC Motor System Using a PID Controller Fall 2012 IMPORTANT: This handout is common for all workbenches. 1. Lab Information a) Date, Time, Location, and Report
Rotary Motion Servo Plant: SRV02. Rotary Experiment #02: Position Control. SRV02 Position Control using QuaRC. Student Manual
 Rotary Motion Servo Plant: SRV02 Rotary Experiment #02: Position Control SRV02 Position Control using QuaRC Student Manual Table of Contents 1. INTRODUCTION...1 2. PREREQUISITES...1 3. OVERVIEW OF FILES...2
Rotary Motion Servo Plant: SRV02 Rotary Experiment #02: Position Control SRV02 Position Control using QuaRC Student Manual Table of Contents 1. INTRODUCTION...1 2. PREREQUISITES...1 3. OVERVIEW OF FILES...2
QuickBuilder PID Reference
 QuickBuilder PID Reference Doc. No. 951-530031-006 2010 Control Technology Corp. 25 South Street Hopkinton, MA 01748 Phone: 508.435.9595 Fax: 508.435.2373 Thursday, March 18, 2010 2 QuickBuilder PID Reference
QuickBuilder PID Reference Doc. No. 951-530031-006 2010 Control Technology Corp. 25 South Street Hopkinton, MA 01748 Phone: 508.435.9595 Fax: 508.435.2373 Thursday, March 18, 2010 2 QuickBuilder PID Reference
Configuration Example of Temperature Control
 Controllers Technical Information Configuration Example of Control controllers The following is an example of the configuration of temperature control. Controller Relay Voltage Current SSR Cycle controller
Controllers Technical Information Configuration Example of Control controllers The following is an example of the configuration of temperature control. Controller Relay Voltage Current SSR Cycle controller
Lab 5: Control and Feedback. Lab 5: Controls and feedback. Lab 5: Controls and Feedback
 Lab : Control and Feedback Lab : Controls and feedback K K You may need a resistor other than exactly K for better sensitivity This embedded system uses the Photo sensor to detect the light intensity of
Lab : Control and Feedback Lab : Controls and feedback K K You may need a resistor other than exactly K for better sensitivity This embedded system uses the Photo sensor to detect the light intensity of
Servo control: Ball on beam
 Please do not remove this manual from the lab. It is available via Canvas Electronics Aims of this experiment Implement a digital feedback system to balance a ball on a beam. Investigate the effect of
Please do not remove this manual from the lab. It is available via Canvas Electronics Aims of this experiment Implement a digital feedback system to balance a ball on a beam. Investigate the effect of
ME 333 Assignment 7 and 8 PI Control of LED/Phototransistor Pair. Overview
 ME 333 Assignment 7 and 8 PI Control of LED/Phototransistor Pair Overview For this assignment, you will be controlling the light emitted from and received by an LED/phototransistor pair. There are many
ME 333 Assignment 7 and 8 PI Control of LED/Phototransistor Pair Overview For this assignment, you will be controlling the light emitted from and received by an LED/phototransistor pair. There are many
Temperature Control in HVAC Application using PID and Self-Tuning Adaptive Controller
 International Journal of Emerging Trends in Science and Technology Temperature Control in HVAC Application using PID and Self-Tuning Adaptive Controller Authors Swarup D. Ramteke 1, Bhagsen J. Parvat 2
International Journal of Emerging Trends in Science and Technology Temperature Control in HVAC Application using PID and Self-Tuning Adaptive Controller Authors Swarup D. Ramteke 1, Bhagsen J. Parvat 2
Feedback Systems in HVAC ASHRAE Distinguished Lecture Series Jim Coogan Siemens Building Technologies
 Feedback Systems in HVAC ASHRAE Distinguished Lecture Series Jim Coogan Siemens Building Technologies ASHRAE, Madison Chapter October, 2014 Agenda Definitions: feedback and closed-loop control Types of
Feedback Systems in HVAC ASHRAE Distinguished Lecture Series Jim Coogan Siemens Building Technologies ASHRAE, Madison Chapter October, 2014 Agenda Definitions: feedback and closed-loop control Types of
Closed-loop System, PID Controller
 Closed-loop System, PID Controller M. Fikar Department of Information Engineering and Process Control Institute of Information Engineering, Automation and Mathematics FCFT STU in Bratislava TAR MF (IRP)
Closed-loop System, PID Controller M. Fikar Department of Information Engineering and Process Control Institute of Information Engineering, Automation and Mathematics FCFT STU in Bratislava TAR MF (IRP)
Teaching Children Proportional Control using ROBOLAB 2.9. By Dr C S Soh
 Teaching Children Proportional Control using ROBOLAB 2.9 By Dr C S Soh robodoc@fifth-r.com Objective Using ROBOLAB 2.9, children can experiment with proportional control the same way as undergraduates
Teaching Children Proportional Control using ROBOLAB 2.9 By Dr C S Soh robodoc@fifth-r.com Objective Using ROBOLAB 2.9, children can experiment with proportional control the same way as undergraduates
Control System for Lamp Luminosity. Ian Johnson, Tyler McCracken, Scott Freund EE 554 November 29, 2010
 Control System for Lamp Luminosity Ian Johnson, Tyler McCracken, Scott Freund EE 554 November 29, 2010 Table of Contents Abstract...ii Introduction...1 Procedure...1 Results/Discussion...3 Conclusion...4
Control System for Lamp Luminosity Ian Johnson, Tyler McCracken, Scott Freund EE 554 November 29, 2010 Table of Contents Abstract...ii Introduction...1 Procedure...1 Results/Discussion...3 Conclusion...4
Andrea Zanchettin Automatic Control 1 AUTOMATIC CONTROL. Andrea M. Zanchettin, PhD Winter Semester, Linear control systems design Part 1
 Andrea Zanchettin Automatic Control 1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Winter Semester, 2018 Linear control systems design Part 1 Andrea Zanchettin Automatic Control 2 Step responses Assume
Andrea Zanchettin Automatic Control 1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Winter Semester, 2018 Linear control systems design Part 1 Andrea Zanchettin Automatic Control 2 Step responses Assume
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control. October 5, 2009 Dr. Harrison H. Chin
 2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
Frequency Response Analysis and Design Tutorial
 1 of 13 1/11/2011 5:43 PM Frequency Response Analysis and Design Tutorial I. Bode plots [ Gain and phase margin Bandwidth frequency Closed loop response ] II. The Nyquist diagram [ Closed loop stability
1 of 13 1/11/2011 5:43 PM Frequency Response Analysis and Design Tutorial I. Bode plots [ Gain and phase margin Bandwidth frequency Closed loop response ] II. The Nyquist diagram [ Closed loop stability
Digital Logic, Algorithms, and Functions for the CEBAF Upgrade LLRF System Hai Dong, Curt Hovater, John Musson, and Tomasz Plawski
 Digital Logic, Algorithms, and Functions for the CEBAF Upgrade LLRF System Hai Dong, Curt Hovater, John Musson, and Tomasz Plawski Introduction: The CEBAF upgrade Low Level Radio Frequency (LLRF) control
Digital Logic, Algorithms, and Functions for the CEBAF Upgrade LLRF System Hai Dong, Curt Hovater, John Musson, and Tomasz Plawski Introduction: The CEBAF upgrade Low Level Radio Frequency (LLRF) control
MAHALAKSHMI ENGINEERING COLLEGE TIRUCHIRAPALLI
 MAHALAKSHMI ENGINEERING COLLEGE TIRUCHIRAPALLI 621213 QUESTION BANK WITH ANSWER --------------------------------------------------------------------------------------------------------------Sub. Code :
MAHALAKSHMI ENGINEERING COLLEGE TIRUCHIRAPALLI 621213 QUESTION BANK WITH ANSWER --------------------------------------------------------------------------------------------------------------Sub. Code :
The PID controller. Summary. Introduction to Control Systems
 The PID controller ISTTOK real-time AC 7-10-2010 Summary Introduction to Control Systems PID Controller PID Tuning Discrete-time Implementation The PID controller 2 Introduction to Control Systems Some
The PID controller ISTTOK real-time AC 7-10-2010 Summary Introduction to Control Systems PID Controller PID Tuning Discrete-time Implementation The PID controller 2 Introduction to Control Systems Some
PROCESS DYNAMICS AND CONTROL
 PROCESS DYNAMICS AND CONTROL CHBE306, Fall 2017 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering Korea University Korea University 1-1 Objectives of the Class What is process control?
PROCESS DYNAMICS AND CONTROL CHBE306, Fall 2017 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering Korea University Korea University 1-1 Objectives of the Class What is process control?
Class 5. Competency Exam Round 1. The Process Designer s Process. Process Control Preliminaries. On/Off Control The Simplest Controller
 Class 5 Competency Exam Round 1 Proportional Control Starts Friday, September 17 Ends Friday, October 1 Process Control Preliminaries The final control element, process and sensor/transmitter all have
Class 5 Competency Exam Round 1 Proportional Control Starts Friday, September 17 Ends Friday, October 1 Process Control Preliminaries The final control element, process and sensor/transmitter all have
Introduction to Digital Control
 Introduction to Digital Control Control systems are an integral part of modern society. Control systems exist in many systems of engineering, sciences, and in human body. Control means to regulate, direct,
Introduction to Digital Control Control systems are an integral part of modern society. Control systems exist in many systems of engineering, sciences, and in human body. Control means to regulate, direct,
EE 308 Spring Preparation for Final Lab Project Simple Motor Control. Motor Control
 Preparation for Final Lab Project Simple Motor Control Motor Control A proportional integral derivative controller (PID controller) is a generic control loop feedback mechanism (controller) widely used
Preparation for Final Lab Project Simple Motor Control Motor Control A proportional integral derivative controller (PID controller) is a generic control loop feedback mechanism (controller) widely used
GE420 Laboratory Assignment 8 Positioning Control of a Motor Using PD, PID, and Hybrid Control
 GE420 Laboratory Assignment 8 Positioning Control of a Motor Using PD, PID, and Hybrid Control Goals for this Lab Assignment: 1. Design a PD discrete control algorithm to allow the closed-loop combination
GE420 Laboratory Assignment 8 Positioning Control of a Motor Using PD, PID, and Hybrid Control Goals for this Lab Assignment: 1. Design a PD discrete control algorithm to allow the closed-loop combination
When you configure a PID loop in iocontrol, choose one of the following algorithms: Velocity ISA Parallel Interacting
 When you configure a PID loop in iocontrol, choose one of the following algorithms: Velocity ISA Parallel Interacting The ISA, Parallel and Interacting algorithms are functionally equivalent; the only
When you configure a PID loop in iocontrol, choose one of the following algorithms: Velocity ISA Parallel Interacting The ISA, Parallel and Interacting algorithms are functionally equivalent; the only
Module 08 Controller Designs: Compensators and PIDs
 Module 08 Controller Designs: Compensators and PIDs Ahmad F. Taha EE 3413: Analysis and Desgin of Control Systems Email: ahmad.taha@utsa.edu Webpage: http://engineering.utsa.edu/ taha March 31, 2016 Ahmad
Module 08 Controller Designs: Compensators and PIDs Ahmad F. Taha EE 3413: Analysis and Desgin of Control Systems Email: ahmad.taha@utsa.edu Webpage: http://engineering.utsa.edu/ taha March 31, 2016 Ahmad
Introduction to Servo Control & PID Tuning
 Introduction to Servo Control & PID Tuning Presented to: Agenda Introduction to Servo Control Theory PID Algorithm Overview Tuning & General System Characterization Oscillation Characterization Feed-forward
Introduction to Servo Control & PID Tuning Presented to: Agenda Introduction to Servo Control Theory PID Algorithm Overview Tuning & General System Characterization Oscillation Characterization Feed-forward
Based on the ARM and PID Control Free Pendulum Balance System
 Available online at www.sciencedirect.com Procedia Engineering 29 (2012) 3491 3495 2012 International Workshop on Information and Electronics Engineering (IWIEE) Based on the ARM and PID Control Free Pendulum
Available online at www.sciencedirect.com Procedia Engineering 29 (2012) 3491 3495 2012 International Workshop on Information and Electronics Engineering (IWIEE) Based on the ARM and PID Control Free Pendulum
VECTOR CONTROL SCHEME FOR INDUCTION MOTOR WITH DIFFERENT CONTROLLERS FOR NEGLECTING THE END EFFECTS IN HEV APPLICATIONS
 VECTOR CONTROL SCHEME FOR INDUCTION MOTOR WITH DIFFERENT CONTROLLERS FOR NEGLECTING THE END EFFECTS IN HEV APPLICATIONS M.LAKSHMISWARUPA 1, G.TULASIRAMDAS 2 & P.V.RAJGOPAL 3 1 Malla Reddy Engineering College,
VECTOR CONTROL SCHEME FOR INDUCTION MOTOR WITH DIFFERENT CONTROLLERS FOR NEGLECTING THE END EFFECTS IN HEV APPLICATIONS M.LAKSHMISWARUPA 1, G.TULASIRAMDAS 2 & P.V.RAJGOPAL 3 1 Malla Reddy Engineering College,
PROCESS DYNAMICS AND CONTROL
 Objectives of the Class PROCESS DYNAMICS AND CONTROL CHBE320, Spring 2018 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering What is process control? Basics of process control Basic hardware
Objectives of the Class PROCESS DYNAMICS AND CONTROL CHBE320, Spring 2018 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering What is process control? Basics of process control Basic hardware
12. ELECTRONICS & INSTRUMENTATION FOR TEMPERATURE
 12. ELECTRONICS & INSTRUMENTATION FOR TEMPERATURE 12.1 INTRODUCTION The range requirement in instrumentation ranges from a simple display of a single temperature value to multi sensor data acquisition
12. ELECTRONICS & INSTRUMENTATION FOR TEMPERATURE 12.1 INTRODUCTION The range requirement in instrumentation ranges from a simple display of a single temperature value to multi sensor data acquisition
Load Frequency and Voltage Control of Two Area Interconnected Power System using PID Controller. Kavita Goswami 1 and Lata Mishra 2
 e t International Journal on Emerging Technologies (Special Issue NCETST-2017) 8(1): 722-726(2017) (Published by Research Trend, Website: www.researchtrend.net) ISSN No. (Print) : 0975-8364 ISSN No. (Online)
e t International Journal on Emerging Technologies (Special Issue NCETST-2017) 8(1): 722-726(2017) (Published by Research Trend, Website: www.researchtrend.net) ISSN No. (Print) : 0975-8364 ISSN No. (Online)
SxWEB PID algorithm experimental tuning
 SxWEB PID algorithm experimental tuning rev. 0.3, 13 July 2017 Index 1. PID ALGORITHM SX2WEB24 SYSTEM... 2 2. PID EXPERIMENTAL TUNING IN THE SX2WEB24... 3 2.1 OPEN LOOP TUNING PROCEDURE... 3 2.1.1 How
SxWEB PID algorithm experimental tuning rev. 0.3, 13 July 2017 Index 1. PID ALGORITHM SX2WEB24 SYSTEM... 2 2. PID EXPERIMENTAL TUNING IN THE SX2WEB24... 3 2.1 OPEN LOOP TUNING PROCEDURE... 3 2.1.1 How
Servo Tuning. Dr. Rohan Munasinghe Department. of Electronic and Telecommunication Engineering University of Moratuwa. Thanks to Dr.
 Servo Tuning Dr. Rohan Munasinghe Department. of Electronic and Telecommunication Engineering University of Moratuwa Thanks to Dr. Jacob Tal Overview Closed Loop Motion Control System Brain Brain Muscle
Servo Tuning Dr. Rohan Munasinghe Department. of Electronic and Telecommunication Engineering University of Moratuwa Thanks to Dr. Jacob Tal Overview Closed Loop Motion Control System Brain Brain Muscle
(1) Identify individual entries in a Control Loop Diagram. (2) Sketch Bode Plots by hand (when we could have used a computer
 Identify individual entries in a Control Loop Diagram. (2) Sketch Bode Plots by hand (when we could have used a computer") Last day: (1) Identify individual entries in a Control Loop Diagram (2) Sketch Bode Plots by hand (when we could have used a computer program to generate sketches). How might this be useful? Can more clearly
Last day: (1) Identify individual entries in a Control Loop Diagram (2) Sketch Bode Plots by hand (when we could have used a computer program to generate sketches). How might this be useful? Can more clearly
Design of stepper motor position control system based on DSP. Guan Fang Liu a, Hua Wei Li b
 nd International Conference on Machinery, Electronics and Control Simulation (MECS 17) Design of stepper motor position control system based on DSP Guan Fang Liu a, Hua Wei Li b School of Electrical Engineering,
nd International Conference on Machinery, Electronics and Control Simulation (MECS 17) Design of stepper motor position control system based on DSP Guan Fang Liu a, Hua Wei Li b School of Electrical Engineering,
Lecture 5 Introduction to control
 Lecture 5 Introduction to control Feedback control is a way of automatically adjusting a variable to a desired value despite possible external influence or variations. Eg: Heating your house. No feedback
Lecture 5 Introduction to control Feedback control is a way of automatically adjusting a variable to a desired value despite possible external influence or variations. Eg: Heating your house. No feedback
Embedded Control Project -Iterative learning control for
 Embedded Control Project -Iterative learning control for Author : Axel Andersson Hariprasad Govindharajan Shahrzad Khodayari Project Guide : Alexander Medvedev Program : Embedded Systems and Engineering
Embedded Control Project -Iterative learning control for Author : Axel Andersson Hariprasad Govindharajan Shahrzad Khodayari Project Guide : Alexander Medvedev Program : Embedded Systems and Engineering
Andrea Zanchettin Automatic Control 1 AUTOMATIC CONTROL. Andrea M. Zanchettin, PhD Spring Semester, Linear control systems design
 Andrea Zanchettin Automatic Control 1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Spring Semester, 2018 Linear control systems design Andrea Zanchettin Automatic Control 2 The control problem Let s introduce
Andrea Zanchettin Automatic Control 1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Spring Semester, 2018 Linear control systems design Andrea Zanchettin Automatic Control 2 The control problem Let s introduce
PERSONALIZED EXPERIMENTATION IN CLASSICAL CONTROLS WITH MATLAB REAL TIME WINDOWS TARGET AND PORTABLE AEROPENDULUM KIT
 Eniko T. Enikov, University of Arizona Estelle Eke, California State University Sacramento PERSONALIZED EXPERIMENTATION IN CLASSICAL CONTROLS WITH MATLAB REAL TIME WINDOWS TARGET AND PORTABLE AEROPENDULUM
Eniko T. Enikov, University of Arizona Estelle Eke, California State University Sacramento PERSONALIZED EXPERIMENTATION IN CLASSICAL CONTROLS WITH MATLAB REAL TIME WINDOWS TARGET AND PORTABLE AEROPENDULUM
Design Of PID Controller In Automatic Voltage Regulator (AVR) System Using PSO Technique
 System Using PSO Technique") Design Of PID Controller In Automatic Voltage Regulator (AVR) System Using PSO Technique Vivek Kumar Bhatt 1, Dr. Sandeep Bhongade 2 1,2 Department of Electrical Engineering, S. G. S. Institute of Technology
Design Of PID Controller In Automatic Voltage Regulator (AVR) System Using PSO Technique Vivek Kumar Bhatt 1, Dr. Sandeep Bhongade 2 1,2 Department of Electrical Engineering, S. G. S. Institute of Technology
Figure 1.1: Quanser Driving Simulator
 1 INTRODUCTION The Quanser HIL Driving Simulator (QDS) is a modular and expandable LabVIEW model of a car driving on a closed track. The model is intended as a platform for the development, implementation
1 INTRODUCTION The Quanser HIL Driving Simulator (QDS) is a modular and expandable LabVIEW model of a car driving on a closed track. The model is intended as a platform for the development, implementation
AVR221: Discrete PID Controller on tinyavr and megaavr devices. Introduction. AVR 8-bit Microcontrollers APPLICATION NOTE
 AVR 8-bit Microcontrollers AVR221: Discrete PID Controller on tinyavr and megaavr devices APPLICATION NOTE Introduction This application note describes a simple implementation of a discrete Proportional-
AVR 8-bit Microcontrollers AVR221: Discrete PID Controller on tinyavr and megaavr devices APPLICATION NOTE Introduction This application note describes a simple implementation of a discrete Proportional-
Control System Design for Tricopter using Filters and PID controller
 Control System Design for Tricopter using Filters and PID controller Abstract The purpose of this paper is to present the control system design of Tricopter. We have presented the implementation of control
Control System Design for Tricopter using Filters and PID controller Abstract The purpose of this paper is to present the control system design of Tricopter. We have presented the implementation of control
TUNING OF PID CONTROLLERS USING PARTICLE SWARM OPTIMIZATION
 TUNING OF PID CONTROLLERS USING PARTICLE SWARM OPTIMIZATION 1 K.LAKSHMI SOWJANYA, 2 L.RAVI SRINIVAS M.Tech Student, Department of Electrical & Electronics Engineering, Gudlavalleru Engineering College,
TUNING OF PID CONTROLLERS USING PARTICLE SWARM OPTIMIZATION 1 K.LAKSHMI SOWJANYA, 2 L.RAVI SRINIVAS M.Tech Student, Department of Electrical & Electronics Engineering, Gudlavalleru Engineering College,
CHAPTER 6 INTRODUCTION TO SYSTEM IDENTIFICATION
 CHAPTER 6 INTRODUCTION TO SYSTEM IDENTIFICATION Broadly speaking, system identification is the art and science of using measurements obtained from a system to characterize the system. The characterization
CHAPTER 6 INTRODUCTION TO SYSTEM IDENTIFICATION Broadly speaking, system identification is the art and science of using measurements obtained from a system to characterize the system. The characterization
PID. What is PID and how does it work? Auto tuning PID with the 5400 Controller. Visit our website at:
 PID What is PID and how does it work? Auto tuning PID with the 5400 Controller What is PID? PID control (pronounced P-eye-Dee) stands for Proportional-Integral-Derivative, and is a mathematical method
PID What is PID and how does it work? Auto tuning PID with the 5400 Controller What is PID? PID control (pronounced P-eye-Dee) stands for Proportional-Integral-Derivative, and is a mathematical method
COMPARISON OF TUNING METHODS OF PID CONTROLLER USING VARIOUS TUNING TECHNIQUES WITH GENETIC ALGORITHM
 JOURNAL OF ELECTRICAL ENGINEERING & TECHNOLOGY Journal of Electrical Engineering & Technology (JEET) (JEET) ISSN 2347-422X (Print), ISSN JEET I A E M E ISSN 2347-422X (Print) ISSN 2347-4238 (Online) Volume
JOURNAL OF ELECTRICAL ENGINEERING & TECHNOLOGY Journal of Electrical Engineering & Technology (JEET) (JEET) ISSN 2347-422X (Print), ISSN JEET I A E M E ISSN 2347-422X (Print) ISSN 2347-4238 (Online) Volume
Engine Control Workstation Using Simulink / DSP. Platform. Mark Bright, Mike Donaldson. Advisor: Dr. Dempsey
 Engine Control Workstation Using Simulink / DSP Platform By Mark Bright, Mike Donaldson Advisor: Dr. Dempsey An Engine Control Workstation was designed to simulate the thermal environments found in liquid-based
Engine Control Workstation Using Simulink / DSP Platform By Mark Bright, Mike Donaldson Advisor: Dr. Dempsey An Engine Control Workstation was designed to simulate the thermal environments found in liquid-based