Linear Control Systems Lectures #5 - PID Controller. Guillaume Drion Academic year
|
|
|
- Lee Long
- 5 years ago
- Views:
Transcription
1 Linear Control Systems Lectures #5 - PID Controller Guillaume Drion Academic year
2 Outline PID controller: general form Effects of the proportional, integral and derivative actions PID tuning Integrator windup and setpoint weighting 2
3 A simple controller to control complex systems: PID Closing the loop: the controller signal enters in the input Input SYSTEM Output CONTROLLER Classical controller: Proportional-Integral-Derivative (PID) where is an error measure between a reference and the output of the system. 3

4 The classical controller: PID controller PID stands for Proportional-Integral-Derivative. 4
5 The classical controller: PID controller Proportional term: considers the current value of the error. 5
6 The classical controller: PID controller Integral term: considers the past values of the error. 6
7 The classical controller: PID controller Derivative term: predicts the future values of the error. 7
8 The classical controller: PID controller Derivative term: predicts the future values of the error.!! Most PID controllers do not use derivative action!! 8
9 PID controller design: shaping the feedback gains Controller design: shaping the loop gains to improve the static and dynamic performances of the controller. 9
10 Two types of PID controllers Controller design: shaping the loop gains to improve the static and dynamic performances of the controller. In (a), P, I and D act on control error. In (b), I acts on control error, and P and D act on systems output. 10
11 Outline PID controller: general form Effects of the proportional, integral and derivative actions PID tuning Integrator windup and setpoint weighting 11
12 PID controller with error feedback The two forms encountered in control systems: T i = integral time constant, T d = derivative time constant. 12
13 PID controller design: pure proportional feedback Pure proportional feedback: steady-state error! Indeed: For a pure proportional feedback at steady-state, the error is given by The error goes to zero as k p goes to infinity, but increasing k p will eventually destabilize the closed-loop system (gain margin). 13
14 PID controller design: pure proportional feedback Pure proportional feedback: steady-state error! Indeed: For a pure proportional feedback at steady-state, the error is given by To avoid steady-state error, we can use a feedforward term: with u ff us called reset in the PID literature, and has to be adjusted manually. 14
15 PID controller design: derivative action Derivative action: predictive and anticipatory action. If k d is increased, system responses is damped. But derivative action amplifies high frequencies (hence reduces noise rejection). Derivative action should be used with a filter (= lead compensator): C d (s) = k ds 1+sT f 15
16 PID controller design: integral action Integral action: no steady-state error. 16
17 PID controller design 17
18 Outline PID controller: general form Effects of the proportional, integral and derivative actions PID tuning Integrator windup and setpoint weighting 18
19 Ziegler-Nichol s tuning Feedback gains are extracted from the dynamical response of the open-loop process. Two methods: a time-domain method and a frequency-domain method 19
20 Ziegler-Nichol s tuning - time-domain method Feedback gains are extracted from the step response of the process. a/ is an approximation of the time delay of the system. is the steepest slope of the step response. 20
21 Ziegler-Nichol s tuning - frequency-domain method Start with zero gain, and increase proportional gain until systems start to oscillate. k c = critical proportional gain, T c = period of oscillation,.! c = 2 T c 21
22 Ziegler-Nichol s tuning - Improvements Time-domain method: characterize the step response by K, and T in the model 22
23 Outline PID controller: general form Effects of the proportional, integral and derivative actions PID tuning Integrator windup and setpoint weighting 23
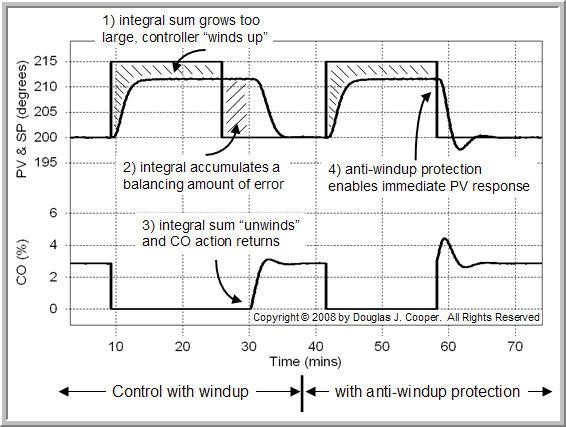
24 Integrator windup If the control variable saturates (i.e. reaches the actuator limits), there will be a residual error that will be continuously integrated by the controller. The integral term will build up, and eventually become very large. The control signal will then remain saturated even when the error changes, and it may take a long time before the integrator and the controller output come inside the saturation range. Integrator windup 24
25 Integrator windup 25
26 Anti-windup Anti-windup: avoiding error integration while in saturation 26
27 Integrator windup 27
28 Integrator windup If the control variable saturates (i.e. reaches the actuator limits), there will be a residual error that will be continuously integrated by the controller. The integral term will build up, and eventually become very large. 28
29 Setpoint weighting When there is an abrupt change in the reference, the proportional and derivative actions can become very big and lead to a large initial peak. To reduce this peak, we can only show a fraction of the reference to the proportional and derivative controllers: Setpoint (or reference) weight ( 2 [0, 1] ) Setpoint (or reference) weight ( 2 [0, 1] ) No setpoint weight on the integral action! This would lead to systematic steady-state error. 29
30 Setpoint weighting 30
31 The classical controller: PID controller PID stands for Proportional-Integral-Derivative. 31
MM7 Practical Issues Using PID Controllers
 MM7 Practical Issues Using PID Controllers Readings: FC textbook: Section 4.2.7 Integrator Antiwindup p.196-200 Extra reading: Hou Ming s lecture notes p.60-69 Extra reading: M.J. Willis notes on PID controler
MM7 Practical Issues Using PID Controllers Readings: FC textbook: Section 4.2.7 Integrator Antiwindup p.196-200 Extra reading: Hou Ming s lecture notes p.60-69 Extra reading: M.J. Willis notes on PID controler
Experiment 9. PID Controller
 Experiment 9 PID Controller Objective: - To be familiar with PID controller. - Noting how changing PID controller parameter effect on system response. Theory: The basic function of a controller is to execute
Experiment 9 PID Controller Objective: - To be familiar with PID controller. - Noting how changing PID controller parameter effect on system response. Theory: The basic function of a controller is to execute
CDS 101/110: Lecture 8.2 PID Control
 CDS 11/11: Lecture 8.2 PID Control November 16, 216 Goals: Nyquist Example Introduce and review PID control. Show how to use loop shaping using PID to achieve a performance specification Discuss the use
CDS 11/11: Lecture 8.2 PID Control November 16, 216 Goals: Nyquist Example Introduce and review PID control. Show how to use loop shaping using PID to achieve a performance specification Discuss the use
Loop Design. Chapter Introduction
 Chapter 8 Loop Design 8.1 Introduction This is the first Chapter that deals with design and we will therefore start by some general aspects on design of engineering systems. Design is complicated because
Chapter 8 Loop Design 8.1 Introduction This is the first Chapter that deals with design and we will therefore start by some general aspects on design of engineering systems. Design is complicated because
Closed-loop System, PID Controller
 Closed-loop System, PID Controller M. Fikar Department of Information Engineering and Process Control Institute of Information Engineering, Automation and Mathematics FCFT STU in Bratislava TAR MF (IRP)
Closed-loop System, PID Controller M. Fikar Department of Information Engineering and Process Control Institute of Information Engineering, Automation and Mathematics FCFT STU in Bratislava TAR MF (IRP)
Different Controller Terms
 Loop Tuning Lab Challenges Not all PID controllers are the same. They don t all use the same units for P-I-and D. There are different types of processes. There are different final element types. There
Loop Tuning Lab Challenges Not all PID controllers are the same. They don t all use the same units for P-I-and D. There are different types of processes. There are different final element types. There
F. Greg Shinskey. "PID Control." Copyright 2000 CRC Press LLC. <
 F. Greg Shinskey. "PID Control." Copyright 2000 CRC Press LLC. . PID Control F. Greg Shinskey Process Control Consultant 97.1 Introduction 97.2 Open and Closed Loops Open-Loop
F. Greg Shinskey. "PID Control." Copyright 2000 CRC Press LLC. . PID Control F. Greg Shinskey Process Control Consultant 97.1 Introduction 97.2 Open and Closed Loops Open-Loop
Automatic Controller Dynamic Specification (Summary of Version 1.0, 11/93)
") The contents of this document are copyright EnTech Control Engineering Inc., and may not be reproduced or retransmitted in any form without the express consent of EnTech Control Engineering Inc. Automatic
The contents of this document are copyright EnTech Control Engineering Inc., and may not be reproduced or retransmitted in any form without the express consent of EnTech Control Engineering Inc. Automatic
Chapter Ten. PID Control Basic Control Functions
 Chapter Ten PID Control Based on a survey of over eleven thousand controllers in the refining, chemicals and pulp and paper industries, 97% of regulatory controllers utilize PID feedback. L. Desborough
Chapter Ten PID Control Based on a survey of over eleven thousand controllers in the refining, chemicals and pulp and paper industries, 97% of regulatory controllers utilize PID feedback. L. Desborough
The Discussion of this exercise covers the following points: Angular position control block diagram and fundamentals. Power amplifier 0.
 Exercise 6 Motor Shaft Angular Position Control EXERCISE OBJECTIVE When you have completed this exercise, you will be able to associate the pulses generated by a position sensing incremental encoder with
Exercise 6 Motor Shaft Angular Position Control EXERCISE OBJECTIVE When you have completed this exercise, you will be able to associate the pulses generated by a position sensing incremental encoder with
The PID controller. Summary. Introduction to Control Systems
 The PID controller ISTTOK real-time AC 7-10-2010 Summary Introduction to Control Systems PID Controller PID Tuning Discrete-time Implementation The PID controller 2 Introduction to Control Systems Some
The PID controller ISTTOK real-time AC 7-10-2010 Summary Introduction to Control Systems PID Controller PID Tuning Discrete-time Implementation The PID controller 2 Introduction to Control Systems Some
Modeling and Analysis of Systems Lecture #9 - Frequency Response. Guillaume Drion Academic year
 Modeling and Analysis of Systems Lecture #9 - Frequency Response Guillaume Drion Academic year 2015-2016 1 Outline Frequency response of LTI systems Bode plots Bandwidth and time-constant 1st order and
Modeling and Analysis of Systems Lecture #9 - Frequency Response Guillaume Drion Academic year 2015-2016 1 Outline Frequency response of LTI systems Bode plots Bandwidth and time-constant 1st order and
InstrumentationTools.com
 Author: Instrumentation Tools Categories: Control Systems Ziegler-Nichols Closed-Loop Method (Ultimate Gain) Closed-loop refers to the operation of a control system with the controlling device in automatic
Author: Instrumentation Tools Categories: Control Systems Ziegler-Nichols Closed-Loop Method (Ultimate Gain) Closed-loop refers to the operation of a control system with the controlling device in automatic
Classical Control Design Guidelines & Tools (L10.2) Transfer Functions
 Transfer Functions") Classical Control Design Guidelines & Tools (L10.2) Douglas G. MacMartin Summarize frequency domain control design guidelines and approach Dec 4, 2013 D. G. MacMartin CDS 110a, 2013 1 Transfer Functions
Classical Control Design Guidelines & Tools (L10.2) Douglas G. MacMartin Summarize frequency domain control design guidelines and approach Dec 4, 2013 D. G. MacMartin CDS 110a, 2013 1 Transfer Functions
Closed-Loop Speed Control, Proportional-Plus-Integral-Plus-Derivative Mode
 Exercise 7 Closed-Loop Speed Control, EXERCISE OBJECTIVE To describe the derivative control mode; To describe the advantages and disadvantages of derivative control; To describe the proportional-plus-integral-plus-derivative
Exercise 7 Closed-Loop Speed Control, EXERCISE OBJECTIVE To describe the derivative control mode; To describe the advantages and disadvantages of derivative control; To describe the proportional-plus-integral-plus-derivative
Systems Engineering/Process control L9
 1 / 31 Systems Engineering/Process control L9 The PID controller The algorithm Frequency analysis Practical modifications Tuning methods Reading: Systems Engineering and Process Control: 9.1 9.6 2 / 31
1 / 31 Systems Engineering/Process control L9 The PID controller The algorithm Frequency analysis Practical modifications Tuning methods Reading: Systems Engineering and Process Control: 9.1 9.6 2 / 31
Lecture 10. Lab next week: Agenda: Control design fundamentals. Proportional Control Proportional-Integral Control
 264 Lab next week: Lecture 10 Lab 17: Proportional Control Lab 18: Proportional-Integral Control (1/2) Agenda: Control design fundamentals Objectives (Tracking, disturbance/noise rejection, robustness)
264 Lab next week: Lecture 10 Lab 17: Proportional Control Lab 18: Proportional-Integral Control (1/2) Agenda: Control design fundamentals Objectives (Tracking, disturbance/noise rejection, robustness)
Discretised PID Controllers. Part of a set of study notes on Digital Control by M. Tham
 Discretised PID Controllers Part of a set of study notes on Digital Control by M. Tham CONTENTS Time Domain Design Laplace Domain Design Positional and Velocity Forms Implementation and Performance Choice
Discretised PID Controllers Part of a set of study notes on Digital Control by M. Tham CONTENTS Time Domain Design Laplace Domain Design Positional and Velocity Forms Implementation and Performance Choice
PROCESS DYNAMICS AND CONTROL
 Objectives of the Class PROCESS DYNAMICS AND CONTROL CHBE320, Spring 2018 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering What is process control? Basics of process control Basic hardware
Objectives of the Class PROCESS DYNAMICS AND CONTROL CHBE320, Spring 2018 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering What is process control? Basics of process control Basic hardware
Closed-Loop Position Control, Proportional Mode
 Exercise 4 Closed-Loop Position Control, Proportional Mode EXERCISE OBJECTIVE To describe the proportional control mode; To describe the advantages and disadvantages of proportional control; To define
Exercise 4 Closed-Loop Position Control, Proportional Mode EXERCISE OBJECTIVE To describe the proportional control mode; To describe the advantages and disadvantages of proportional control; To define
-binary sensors and actuators (such as an on/off controller) are generally more reliable and less expensive
 are generally more reliable and less expensive") Process controls are necessary for designing safe and productive plants. A variety of process controls are used to manipulate processes, however the most simple and often most effective is the PID controller.
Process controls are necessary for designing safe and productive plants. A variety of process controls are used to manipulate processes, however the most simple and often most effective is the PID controller.
Feedback Systems in HVAC ASHRAE Distinguished Lecture Series Jim Coogan Siemens Building Technologies
 Feedback Systems in HVAC ASHRAE Distinguished Lecture Series Jim Coogan Siemens Building Technologies ASHRAE, Madison Chapter October, 2014 Agenda Definitions: feedback and closed-loop control Types of
Feedback Systems in HVAC ASHRAE Distinguished Lecture Series Jim Coogan Siemens Building Technologies ASHRAE, Madison Chapter October, 2014 Agenda Definitions: feedback and closed-loop control Types of
PROCESS DYNAMICS AND CONTROL
 PROCESS DYNAMICS AND CONTROL CHBE306, Fall 2017 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering Korea University Korea University 1-1 Objectives of the Class What is process control?
PROCESS DYNAMICS AND CONTROL CHBE306, Fall 2017 Professor Dae Ryook Yang Dept. of Chemical & Biological Engineering Korea University Korea University 1-1 Objectives of the Class What is process control?
Introduction to Servo Control & PID Tuning
 Introduction to Servo Control & PID Tuning Presented to: Agenda Introduction to Servo Control Theory PID Algorithm Overview Tuning & General System Characterization Oscillation Characterization Feed-forward
Introduction to Servo Control & PID Tuning Presented to: Agenda Introduction to Servo Control Theory PID Algorithm Overview Tuning & General System Characterization Oscillation Characterization Feed-forward
Control Design for Servomechanisms July 2005, Glasgow Detailed Training Course Agenda
 Control Design for Servomechanisms 12 14 July 2005, Glasgow Detailed Training Course Agenda DAY 1 INTRODUCTION TO SYSTEMS AND MODELLING 9.00 Introduction The Need For Control - What Is Control? - Feedback
Control Design for Servomechanisms 12 14 July 2005, Glasgow Detailed Training Course Agenda DAY 1 INTRODUCTION TO SYSTEMS AND MODELLING 9.00 Introduction The Need For Control - What Is Control? - Feedback
Chapter 5. Tracking system with MEMS mirror
 Chapter 5 Tracking system with MEMS mirror Up to now, this project has dealt with the theoretical optimization of the tracking servo with MEMS mirror through the use of simulation models. For these models
Chapter 5 Tracking system with MEMS mirror Up to now, this project has dealt with the theoretical optimization of the tracking servo with MEMS mirror through the use of simulation models. For these models
Effective Teaching Learning Process for PID Controller Based on Experimental Setup with LabVIEW
 Effective Teaching Learning Process for PID Controller Based on Experimental Setup with LabVIEW Komal Sampatrao Patil & D.R.Patil Electrical Department, Walchand college of Engineering, Sangli E-mail :
Effective Teaching Learning Process for PID Controller Based on Experimental Setup with LabVIEW Komal Sampatrao Patil & D.R.Patil Electrical Department, Walchand college of Engineering, Sangli E-mail :
2.7.3 Measurement noise. Signal variance
 62 Finn Haugen: PID Control Figure 2.34: Example 2.15: Temperature control without anti wind-up disturbance has changed back to its normal value). [End of Example 2.15] 2.7.3 Measurement noise. Signal
62 Finn Haugen: PID Control Figure 2.34: Example 2.15: Temperature control without anti wind-up disturbance has changed back to its normal value). [End of Example 2.15] 2.7.3 Measurement noise. Signal
Laboratory Assignment 5 Digital Velocity and Position control of a D.C. motor
 Laboratory Assignment 5 Digital Velocity and Position control of a D.C. motor 2.737 Mechatronics Dept. of Mechanical Engineering Massachusetts Institute of Technology Cambridge, MA0239 Topics Motor modeling
Laboratory Assignment 5 Digital Velocity and Position control of a D.C. motor 2.737 Mechatronics Dept. of Mechanical Engineering Massachusetts Institute of Technology Cambridge, MA0239 Topics Motor modeling
When you configure a PID loop in iocontrol, choose one of the following algorithms: Velocity ISA Parallel Interacting
 When you configure a PID loop in iocontrol, choose one of the following algorithms: Velocity ISA Parallel Interacting The ISA, Parallel and Interacting algorithms are functionally equivalent; the only
When you configure a PID loop in iocontrol, choose one of the following algorithms: Velocity ISA Parallel Interacting The ISA, Parallel and Interacting algorithms are functionally equivalent; the only
Dr Ian R. Manchester Dr Ian R. Manchester Amme 3500 : Root Locus Design
 Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
PYKC 7 March 2019 EA2.3 Electronics 2 Lecture 18-1
 In this lecture, we will examine a very popular feedback controller known as the proportional-integral-derivative (PID) control method. This type of controller is widely used in industry, does not require
In this lecture, we will examine a very popular feedback controller known as the proportional-integral-derivative (PID) control method. This type of controller is widely used in industry, does not require
Relay Feedback based PID Controller for Nonlinear Process
 Relay Feedback based PID Controller for Nonlinear Process I.Thirunavukkarasu, Dr.V.I.George, * and R.Satheeshbabu Abstract This work is about designing a relay feedback based PID controller for a conical
Relay Feedback based PID Controller for Nonlinear Process I.Thirunavukkarasu, Dr.V.I.George, * and R.Satheeshbabu Abstract This work is about designing a relay feedback based PID controller for a conical
Introduction to Signals and Systems Lecture #9 - Frequency Response. Guillaume Drion Academic year
 Introduction to Signals and Systems Lecture #9 - Frequency Response Guillaume Drion Academic year 2017-2018 1 Transmission of complex exponentials through LTI systems Continuous case: LTI system where
Introduction to Signals and Systems Lecture #9 - Frequency Response Guillaume Drion Academic year 2017-2018 1 Transmission of complex exponentials through LTI systems Continuous case: LTI system where
International Journal of Research in Advent Technology Available Online at:
 OVERVIEW OF DIFFERENT APPROACHES OF PID CONTROLLER TUNING Manju Kurien 1, Alka Prayagkar 2, Vaishali Rajeshirke 3 1 IS Department 2 IE Department 3 EV DEpartment VES Polytechnic, Chembur,Mumbai 1 manjulibu@gmail.com
OVERVIEW OF DIFFERENT APPROACHES OF PID CONTROLLER TUNING Manju Kurien 1, Alka Prayagkar 2, Vaishali Rajeshirke 3 1 IS Department 2 IE Department 3 EV DEpartment VES Polytechnic, Chembur,Mumbai 1 manjulibu@gmail.com
LECTURE 2: PD, PID, and Feedback Compensation. ( ) = + We consider various settings for Zc when compensating the system with the following RL:
 = + We consider various settings for Zc when compensating the system with the following RL:") LECTURE 2: PD, PID, and Feedback Compensation. 2.1 Ideal Derivative Compensation (PD) Generally, we want to speed up the transient response (decrease Ts and Tp). If we are lucky then a system s desired
LECTURE 2: PD, PID, and Feedback Compensation. 2.1 Ideal Derivative Compensation (PD) Generally, we want to speed up the transient response (decrease Ts and Tp). If we are lucky then a system s desired
1.2 Software tools for analysis and design of control systems Terminology. Formulation of the control problem... 11
 Contents 1 Introduction 1 1.1 Theimportanceofcontrol... 1 1.2 Software tools for analysis and design of control systems... 5 1.3 Ashorthistoryofcontrol... 6 2 Introduction to feedback control 11 2.1 Introduction...
Contents 1 Introduction 1 1.1 Theimportanceofcontrol... 1 1.2 Software tools for analysis and design of control systems... 5 1.3 Ashorthistoryofcontrol... 6 2 Introduction to feedback control 11 2.1 Introduction...
Andrea Zanchettin Automatic Control 1 AUTOMATIC CONTROL. Andrea M. Zanchettin, PhD Winter Semester, Linear control systems design Part 1
 Andrea Zanchettin Automatic Control 1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Winter Semester, 2018 Linear control systems design Part 1 Andrea Zanchettin Automatic Control 2 Step responses Assume
Andrea Zanchettin Automatic Control 1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Winter Semester, 2018 Linear control systems design Part 1 Andrea Zanchettin Automatic Control 2 Step responses Assume
CHAPTER 4 AN EFFICIENT ANFIS BASED SELF TUNING OF PI CONTROLLER FOR CURRENT HARMONIC MITIGATION
 92 CHAPTER 4 AN EFFICIENT ANFIS BASED SELF TUNING OF PI CONTROLLER FOR CURRENT HARMONIC MITIGATION 4.1 OVERVIEW OF PI CONTROLLER Proportional Integral (PI) controllers have been developed due to the unique
92 CHAPTER 4 AN EFFICIENT ANFIS BASED SELF TUNING OF PI CONTROLLER FOR CURRENT HARMONIC MITIGATION 4.1 OVERVIEW OF PI CONTROLLER Proportional Integral (PI) controllers have been developed due to the unique
CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING. Professor Dae Ryook Yang
 CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 11-1 Road Map of the Lecture XI Controller Design and PID
CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 11-1 Road Map of the Lecture XI Controller Design and PID
Design and Analysis for Robust PID Controller
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 4 Ver. III (Jul Aug. 2014), PP 28-34 Jagriti Pandey 1, Aashish Hiradhar 2 Department
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 4 Ver. III (Jul Aug. 2014), PP 28-34 Jagriti Pandey 1, Aashish Hiradhar 2 Department
Logic Developer Process Edition Function Blocks
 GE Intelligent Platforms Logic Developer Process Edition Function Blocks Delivering increased precision and enabling advanced regulatory control strategies for continuous process control Logic Developer
GE Intelligent Platforms Logic Developer Process Edition Function Blocks Delivering increased precision and enabling advanced regulatory control strategies for continuous process control Logic Developer
CONTROLLER DESIGN FOR POWER CONVERSION SYSTEMS
 CONTROLLER DESIGN FOR POWER CONVERSION SYSTEMS Introduction A typical feedback system found in power converters Switched-mode power converters generally use PI, pz, or pz feedback compensators to regulate
CONTROLLER DESIGN FOR POWER CONVERSION SYSTEMS Introduction A typical feedback system found in power converters Switched-mode power converters generally use PI, pz, or pz feedback compensators to regulate
1. Consider the closed loop system shown in the figure below. Select the appropriate option to implement the system shown in dotted lines using
 1. Consider the closed loop system shown in the figure below. Select the appropriate option to implement the system shown in dotted lines using op-amps a. b. c. d. Solution: b) Explanation: The dotted
1. Consider the closed loop system shown in the figure below. Select the appropriate option to implement the system shown in dotted lines using op-amps a. b. c. d. Solution: b) Explanation: The dotted
6.270 Lecture. Control Systems
 6.270 Lecture Control Systems Steven Jorgensen Massachusetts Institute of Technology January 2014 Overview of Lecture Feed Forward Open Loop Controller Pros and Cons Bang-Bang Closed Loop Controller Intro
6.270 Lecture Control Systems Steven Jorgensen Massachusetts Institute of Technology January 2014 Overview of Lecture Feed Forward Open Loop Controller Pros and Cons Bang-Bang Closed Loop Controller Intro
Comparative Study of PID and FOPID Controller Response for Automatic Voltage Regulation
 IOSR Journal of Engineering (IOSRJEN) ISSN (e): 2250-3021, ISSN (p): 2278-8719 Vol. 04, Issue 09 (September. 2014), V5 PP 41-48 www.iosrjen.org Comparative Study of PID and FOPID Controller Response for
IOSR Journal of Engineering (IOSRJEN) ISSN (e): 2250-3021, ISSN (p): 2278-8719 Vol. 04, Issue 09 (September. 2014), V5 PP 41-48 www.iosrjen.org Comparative Study of PID and FOPID Controller Response for
 EC6405 - CONTROL SYSTEM ENGINEERING Questions and Answers Unit - II Time Response Analysis Two marks 1. What is transient response? The transient response is the response of the system when the system
EC6405 - CONTROL SYSTEM ENGINEERING Questions and Answers Unit - II Time Response Analysis Two marks 1. What is transient response? The transient response is the response of the system when the system
Find, read or write documentation which describes work of the control loop: Process Control Philosophy. Where the next information can be found:
 1 Controller uning o implement continuous control we should assemble a control loop which consists of the process/object, controller, sensors and actuators. Information about the control loop Find, read
1 Controller uning o implement continuous control we should assemble a control loop which consists of the process/object, controller, sensors and actuators. Information about the control loop Find, read
Process Measurement, Instrumentation & Process Control: Principles & Best Practices
 Process Measurement, Instrumentation & Process Control: Principles & Best Practices SECTOR / ENGINEERING NON-TECHNICAL & CERTIFIED TRAINING COURSE This is a hands-on, practical training course and where
Process Measurement, Instrumentation & Process Control: Principles & Best Practices SECTOR / ENGINEERING NON-TECHNICAL & CERTIFIED TRAINING COURSE This is a hands-on, practical training course and where
Basic Tuning for the SERVOSTAR 400/600
 Basic Tuning for the SERVOSTAR 400/600 Welcome to Kollmorgen s interactive tuning chart. The first three sheets of this document provide a flow chart to describe tuning the servo gains of a SERVOSTAR 400/600.
Basic Tuning for the SERVOSTAR 400/600 Welcome to Kollmorgen s interactive tuning chart. The first three sheets of this document provide a flow chart to describe tuning the servo gains of a SERVOSTAR 400/600.
Andrea Zanchettin Automatic Control 1 AUTOMATIC CONTROL. Andrea M. Zanchettin, PhD Spring Semester, Linear control systems design
 Andrea Zanchettin Automatic Control 1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Spring Semester, 2018 Linear control systems design Andrea Zanchettin Automatic Control 2 The control problem Let s introduce
Andrea Zanchettin Automatic Control 1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Spring Semester, 2018 Linear control systems design Andrea Zanchettin Automatic Control 2 The control problem Let s introduce
Integrator windup and PID controller design
 Integrator windup and PID controller design by Ania Bae*ca 11/19/2015 Ania Bae*ca, CDS Caltech 1 Integrator windup mechanism Windup = When the controller reaches the actuator limit, then the actuator becomes
Integrator windup and PID controller design by Ania Bae*ca 11/19/2015 Ania Bae*ca, CDS Caltech 1 Integrator windup mechanism Windup = When the controller reaches the actuator limit, then the actuator becomes
ANNA UNIVERSITY :: CHENNAI MODEL QUESTION PAPER(V-SEMESTER) B.E. ELECTRONICS AND COMMUNICATION ENGINEERING EC334 - CONTROL SYSTEMS
 B.E. ELECTRONICS AND COMMUNICATION ENGINEERING EC334 - CONTROL SYSTEMS") ANNA UNIVERSITY :: CHENNAI - 600 025 MODEL QUESTION PAPER(V-SEMESTER) B.E. ELECTRONICS AND COMMUNICATION ENGINEERING EC334 - CONTROL SYSTEMS Time: 3hrs Max Marks: 100 Answer all Questions PART - A (10
ANNA UNIVERSITY :: CHENNAI - 600 025 MODEL QUESTION PAPER(V-SEMESTER) B.E. ELECTRONICS AND COMMUNICATION ENGINEERING EC334 - CONTROL SYSTEMS Time: 3hrs Max Marks: 100 Answer all Questions PART - A (10
Laboratory PID Tuning Based On Frequency Response Analysis. 2. be able to evaluate system performance for empirical tuning method;
 Laboratory PID Tuning Based On Frequency Response Analysis Objectives: At the end, student should 1. appreciate a systematic way of tuning PID loop by the use of process frequency response analysis; 2.
Laboratory PID Tuning Based On Frequency Response Analysis Objectives: At the end, student should 1. appreciate a systematic way of tuning PID loop by the use of process frequency response analysis; 2.
Fundamentals of Servo Motion Control
 Fundamentals of Servo Motion Control The fundamental concepts of servo motion control have not changed significantly in the last 50 years. The basic reasons for using servo systems in contrast to open
Fundamentals of Servo Motion Control The fundamental concepts of servo motion control have not changed significantly in the last 50 years. The basic reasons for using servo systems in contrast to open
DYNAMIC SYSTEM ANALYSIS FOR EDUCATIONAL PURPOSES: IDENTIFICATION AND CONTROL OF A THERMAL LOOP
 DYNAMIC SYSTEM ANALYSIS FOR EDUCATIONAL PURPOSES: IDENTIFICATION AND CONTROL OF A THERMAL LOOP ABSTRACT F.P. NEIRAC, P. GATT Ecole des Mines de Paris, Center for Energy and Processes, email: neirac@ensmp.fr
DYNAMIC SYSTEM ANALYSIS FOR EDUCATIONAL PURPOSES: IDENTIFICATION AND CONTROL OF A THERMAL LOOP ABSTRACT F.P. NEIRAC, P. GATT Ecole des Mines de Paris, Center for Energy and Processes, email: neirac@ensmp.fr
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Modified ultimate cycle method relay auto-tuning
 Adaptive Control - Autotuning Structure of presentation: Relay feedback autotuning outline Relay feedback autotuning details How close is the estimate of the ultimate gain and period to the actual ultimate
Adaptive Control - Autotuning Structure of presentation: Relay feedback autotuning outline Relay feedback autotuning details How close is the estimate of the ultimate gain and period to the actual ultimate
Comparative Analysis of a PID Controller using Ziegler- Nichols and Auto Turning Method
 International Academic Institute for Science and Technology International Academic Journal of Science and Engineering Vol. 3, No. 10, 2016, pp. 1-16. ISSN 2454-3896 International Academic Journal of Science
International Academic Institute for Science and Technology International Academic Journal of Science and Engineering Vol. 3, No. 10, 2016, pp. 1-16. ISSN 2454-3896 International Academic Journal of Science
CDS 101/110: Lecture 9.1 Frequency DomainLoop Shaping
 CDS /: Lecture 9. Frequency DomainLoop Shaping November 3, 6 Goals: Review Basic Loop Shaping Concepts Work through example(s) Reading: Åström and Murray, Feedback Systems -e, Section.,.-.4,.6 I.e., we
CDS /: Lecture 9. Frequency DomainLoop Shaping November 3, 6 Goals: Review Basic Loop Shaping Concepts Work through example(s) Reading: Åström and Murray, Feedback Systems -e, Section.,.-.4,.6 I.e., we
A M E M B E R O F T H E K E N D A L L G R O U P
 A M E M B E R O F T H E K E N D A L L G R O U P Basics of PID control in a Programmable Automation Controller Technology Summit September, 2018 Eric Paquette Definitions-PID A Proportional Integral Derivative
A M E M B E R O F T H E K E N D A L L G R O U P Basics of PID control in a Programmable Automation Controller Technology Summit September, 2018 Eric Paquette Definitions-PID A Proportional Integral Derivative
An Introduction to Proportional- Integral-Derivative (PID) Controllers
 Controllers") An Introduction to Proportional- Integral-Derivative (PID) Controllers Stan Żak School of Electrical and Computer Engineering ECE 680 Fall 2017 1 Motivation Growing gap between real world control problems
An Introduction to Proportional- Integral-Derivative (PID) Controllers Stan Żak School of Electrical and Computer Engineering ECE 680 Fall 2017 1 Motivation Growing gap between real world control problems
Lecture 5 Introduction to control
 Lecture 5 Introduction to control Feedback control is a way of automatically adjusting a variable to a desired value despite possible external influence or variations. Eg: Heating your house. No feedback
Lecture 5 Introduction to control Feedback control is a way of automatically adjusting a variable to a desired value despite possible external influence or variations. Eg: Heating your house. No feedback
EE 4314 Lab 3 Handout Speed Control of the DC Motor System Using a PID Controller Fall Lab Information
 EE 4314 Lab 3 Handout Speed Control of the DC Motor System Using a PID Controller Fall 2012 IMPORTANT: This handout is common for all workbenches. 1. Lab Information a) Date, Time, Location, and Report
EE 4314 Lab 3 Handout Speed Control of the DC Motor System Using a PID Controller Fall 2012 IMPORTANT: This handout is common for all workbenches. 1. Lab Information a) Date, Time, Location, and Report
6545(Print), ISSN (Online) Volume 4, Issue 1, January- February (2013), IAEME & TECHNOLOGY (IJEET)
, ISSN (Online) Volume 4, Issue 1, January- February (2013), IAEME & TECHNOLOGY (IJEET)") INTERNATIONAL International Journal of JOURNAL Electrical Engineering OF ELECTRICAL and Technology (IJEET), ENGINEERING ISSN 0976 & TECHNOLOGY (IJEET) ISSN 0976 6545(Print) ISSN 0976 6553(Online) Volume
INTERNATIONAL International Journal of JOURNAL Electrical Engineering OF ELECTRICAL and Technology (IJEET), ENGINEERING ISSN 0976 & TECHNOLOGY (IJEET) ISSN 0976 6545(Print) ISSN 0976 6553(Online) Volume
Anti Windup Implementation on Different PID Structures
 Pertanika J. Sci. & Technol. 16 (1): 23-30 (2008) SSN: 0128-7680 Universiti Putra Malaysia Press Anti Windup mplementation on Different PD Structures Farah Saleena Taip *1 and Ming T. Tham 2 1 Department
Pertanika J. Sci. & Technol. 16 (1): 23-30 (2008) SSN: 0128-7680 Universiti Putra Malaysia Press Anti Windup mplementation on Different PD Structures Farah Saleena Taip *1 and Ming T. Tham 2 1 Department
PID TUNING WITH INPUT CONSTRAINT: APPLICATION ON FOOD PROCESSING
 83 PID TUNING WITH INPUT CONSTRAINT: APPLICATION ON FOOD PROCESSING B L Chua 1, F.S.Tai 1, N.A.Aziz 1 and T.S.Y Choong 2 1 Department of Process and Food Engineering, 2 Department of Chemical and Environmental
83 PID TUNING WITH INPUT CONSTRAINT: APPLICATION ON FOOD PROCESSING B L Chua 1, F.S.Tai 1, N.A.Aziz 1 and T.S.Y Choong 2 1 Department of Process and Food Engineering, 2 Department of Chemical and Environmental
4F3 - Predictive Control
 4F3 Predictive Control - Lecture 1 p. 1/13 4F3 - Predictive Control Lecture 1 - Introduction to Predictive Control Jan Maciejowski jmm@eng.cam.ac.uk http://www-control.eng.cam.ac.uk/homepage/officialweb.php?id=1
4F3 Predictive Control - Lecture 1 p. 1/13 4F3 - Predictive Control Lecture 1 - Introduction to Predictive Control Jan Maciejowski jmm@eng.cam.ac.uk http://www-control.eng.cam.ac.uk/homepage/officialweb.php?id=1
6.4 Adjusting PID Manually
 Setting Display Parameter Setting Display Operation Display > PARAMETER or PARA key for 3 seconds (to [MODE] Menu Display) > Right arrow key (to [PID] Menu Display ) > SET/ENTER key (The setting parameter
Setting Display Parameter Setting Display Operation Display > PARAMETER or PARA key for 3 seconds (to [MODE] Menu Display) > Right arrow key (to [PID] Menu Display ) > SET/ENTER key (The setting parameter
CHAPTER 2 PID CONTROLLER BASED CLOSED LOOP CONTROL OF DC DRIVE
 23 CHAPTER 2 PID CONTROLLER BASED CLOSED LOOP CONTROL OF DC DRIVE 2.1 PID CONTROLLER A proportional Integral Derivative controller (PID controller) find its application in industrial control system. It
23 CHAPTER 2 PID CONTROLLER BASED CLOSED LOOP CONTROL OF DC DRIVE 2.1 PID CONTROLLER A proportional Integral Derivative controller (PID controller) find its application in industrial control system. It
L09. PID, PURE PURSUIT
 1 L09. PID, PURE PURSUIT EECS 498-6: Autonomous Robotics Laboratory Today s Plan 2 Simple controllers Bang-bang PID Pure Pursuit 1 Control 3 Suppose we have a plan: Hey robot! Move north one meter, the
1 L09. PID, PURE PURSUIT EECS 498-6: Autonomous Robotics Laboratory Today s Plan 2 Simple controllers Bang-bang PID Pure Pursuit 1 Control 3 Suppose we have a plan: Hey robot! Move north one meter, the
Position Control of DC Motor by Compensating Strategies
 Position Control of DC Motor by Compensating Strategies S Prem Kumar 1 J V Pavan Chand 1 B Pangedaiah 1 1. Assistant professor of Laki Reddy Balireddy College Of Engineering, Mylavaram Abstract - As the
Position Control of DC Motor by Compensating Strategies S Prem Kumar 1 J V Pavan Chand 1 B Pangedaiah 1 1. Assistant professor of Laki Reddy Balireddy College Of Engineering, Mylavaram Abstract - As the
Procidia Control Solutions Dead Time Compensation
 APPLICATION DATA Procidia Control Solutions Dead Time Compensation AD353-127 Rev 2 April 2012 This application data sheet describes dead time compensation methods. A configuration can be developed within
APPLICATION DATA Procidia Control Solutions Dead Time Compensation AD353-127 Rev 2 April 2012 This application data sheet describes dead time compensation methods. A configuration can be developed within
PID Controller tuning and implementation aspects for building thermal control
 PID Controller tuning and implementation aspects for building thermal control Kafetzis G. (Technical University of Crete) Patelis P. (Technical University of Crete) Tripolitakis E.I. (Technical University
PID Controller tuning and implementation aspects for building thermal control Kafetzis G. (Technical University of Crete) Patelis P. (Technical University of Crete) Tripolitakis E.I. (Technical University
Control and Optimization
 Control and Optimization Example Design Goals Prevent overheating Meet deadlines Save energy Design Goals Prevent overheating Meet deadlines Save energy Question: what the safety, mission, and performance
Control and Optimization Example Design Goals Prevent overheating Meet deadlines Save energy Design Goals Prevent overheating Meet deadlines Save energy Question: what the safety, mission, and performance
CHAPTER 4 PID CONTROLLER BASED SPEED CONTROL OF THREE PHASE INDUCTION MOTOR
 36 CHAPTER 4 PID CONTROLLER BASED SPEED CONTROL OF THREE PHASE INDUCTION MOTOR 4.1 INTRODUCTION Now a day, a number of different controllers are used in the industry and in many other fields. In a quite
36 CHAPTER 4 PID CONTROLLER BASED SPEED CONTROL OF THREE PHASE INDUCTION MOTOR 4.1 INTRODUCTION Now a day, a number of different controllers are used in the industry and in many other fields. In a quite
GE420 Laboratory Assignment 8 Positioning Control of a Motor Using PD, PID, and Hybrid Control
 GE420 Laboratory Assignment 8 Positioning Control of a Motor Using PD, PID, and Hybrid Control Goals for this Lab Assignment: 1. Design a PD discrete control algorithm to allow the closed-loop combination
GE420 Laboratory Assignment 8 Positioning Control of a Motor Using PD, PID, and Hybrid Control Goals for this Lab Assignment: 1. Design a PD discrete control algorithm to allow the closed-loop combination
Abstract. I. Introduction
 Proceedings of the 17 th Conference on Recent Advances in Robotics (FCRAR 24) Orlando, Florida, May 6-7 24 Autotune of PID Cryogenic Temperature Control Based on Closed-Loop Step Response Tests David Sheats
Proceedings of the 17 th Conference on Recent Advances in Robotics (FCRAR 24) Orlando, Florida, May 6-7 24 Autotune of PID Cryogenic Temperature Control Based on Closed-Loop Step Response Tests David Sheats
LESSON 2: ELECTRONIC CONTROL
 Module 1: Control Concepts LESSON 2: ELECTRONIC CONTROL MODULE 1 Control Concepts OBJECTIVES: At the end of this module, you will be able to: 1. Sketch an open tank level application and state the mass
Module 1: Control Concepts LESSON 2: ELECTRONIC CONTROL MODULE 1 Control Concepts OBJECTIVES: At the end of this module, you will be able to: 1. Sketch an open tank level application and state the mass
TUNABLE METHOD OF PID CONTROLLER FOR UNSTABLE SYSTEM L.R.SWATHIKA 1, V.VIJAYAN 2 *
 Volume 119 No. 15 2018, 1591-1598 ISSN: 1314-3395 (on-line version) url: http://www.acadpubl.eu/hub/ http://www.acadpubl.eu/hub/ TUNABLE METHOD OF PID CONTROLLER FOR UNSTABLE SYSTEM L.R.SWATHIKA 1, V.VIJAYAN
Volume 119 No. 15 2018, 1591-1598 ISSN: 1314-3395 (on-line version) url: http://www.acadpubl.eu/hub/ http://www.acadpubl.eu/hub/ TUNABLE METHOD OF PID CONTROLLER FOR UNSTABLE SYSTEM L.R.SWATHIKA 1, V.VIJAYAN
Scalar control synthesis 1
 Lecture 4 Scalar control synthesis The lectures reviews the main aspects in synthesis of scalar feedback systems. Another name for such systems is single-input-single-output(siso) systems. The specifications
Lecture 4 Scalar control synthesis The lectures reviews the main aspects in synthesis of scalar feedback systems. Another name for such systems is single-input-single-output(siso) systems. The specifications
2.1 PID controller enhancements
 2. Single-Loop Enhancements 2.1 PID controller enhancements 2.1.1 The ideal PID controller 2.1.2 Derivative filter 2.1.3 Setpoint weighting 2.1.4 Handling integrator windup 2.1.5 Industrial PID controllers
2. Single-Loop Enhancements 2.1 PID controller enhancements 2.1.1 The ideal PID controller 2.1.2 Derivative filter 2.1.3 Setpoint weighting 2.1.4 Handling integrator windup 2.1.5 Industrial PID controllers
PROCESS CONTROL DIAGNOSTICS. F. Greg Shinskey Process Control Consultant North Sandwich, NH 03259
 PROCESS CONTROL DIAGNOSTICS F. Greg Shinskey Process Control Consultant North Sandwich, NH 03259 Abstract With all the tuning methods documented, it is remarkable how often controllers are mistuned, focusing
PROCESS CONTROL DIAGNOSTICS F. Greg Shinskey Process Control Consultant North Sandwich, NH 03259 Abstract With all the tuning methods documented, it is remarkable how often controllers are mistuned, focusing
Readings: FC: p : lead compensation. 9/9/2011 Classical Control 1
 MM0 Frequency Response Design Readings: FC: p389-407: lead compensation 9/9/20 Classical Control What Have We Talked about in MM9? Control design based on Bode plot Stability margins (Gain margin and phase
MM0 Frequency Response Design Readings: FC: p389-407: lead compensation 9/9/20 Classical Control What Have We Talked about in MM9? Control design based on Bode plot Stability margins (Gain margin and phase
ANTI-WINDUP SCHEME FOR PRACTICAL CONTROL OF POSITIONING SYSTEMS
 ANTI-WINDUP SCHEME FOR PRACTICAL CONTROL OF POSITIONING SYSTEMS WAHYUDI, TARIG FAISAL AND ABDULGANI ALBAGUL Department of Mechatronics Engineering, International Islamic University, Malaysia, Jalan Gombak,
ANTI-WINDUP SCHEME FOR PRACTICAL CONTROL OF POSITIONING SYSTEMS WAHYUDI, TARIG FAISAL AND ABDULGANI ALBAGUL Department of Mechatronics Engineering, International Islamic University, Malaysia, Jalan Gombak,
Automatic Feedforward Tuning for PID Control Loops
 23 European Control Conference (ECC) July 7-9, 23, Zürich, Switzerland. Automatic Feedforward Tuning for PID Control Loops Massimiliano Veronesi and Antonio Visioli Abstract In this paper we propose a
23 European Control Conference (ECC) July 7-9, 23, Zürich, Switzerland. Automatic Feedforward Tuning for PID Control Loops Massimiliano Veronesi and Antonio Visioli Abstract In this paper we propose a
[ á{tå TÄàt. Chapter Four. Time Domain Analysis of control system
 Chapter Four Time Domain Analysis of control system The time response of a control system consists of two parts: the transient response and the steady-state response. By transient response, we mean that
Chapter Four Time Domain Analysis of control system The time response of a control system consists of two parts: the transient response and the steady-state response. By transient response, we mean that
Controller Algorithms and Tuning
 The previous sections of this module described the purpose of control, defined individual elements within control loops, and demonstrated the symbology used to represent those elements in an engineering
The previous sections of this module described the purpose of control, defined individual elements within control loops, and demonstrated the symbology used to represent those elements in an engineering
EC CONTROL SYSTEMS ENGINEERING
 1 YEAR / SEM: II / IV EC 1256. CONTROL SYSTEMS ENGINEERING UNIT I CONTROL SYSTEM MODELING PART-A 1. Define open loop and closed loop systems. 2. Define signal flow graph. 3. List the force-voltage analogous
1 YEAR / SEM: II / IV EC 1256. CONTROL SYSTEMS ENGINEERING UNIT I CONTROL SYSTEM MODELING PART-A 1. Define open loop and closed loop systems. 2. Define signal flow graph. 3. List the force-voltage analogous
CDS 101/110a: Lecture 8-1 Frequency Domain Design
 CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
AVR221: Discrete PID Controller on tinyavr and megaavr devices. Introduction. AVR 8-bit Microcontrollers APPLICATION NOTE
 AVR 8-bit Microcontrollers AVR221: Discrete PID Controller on tinyavr and megaavr devices APPLICATION NOTE Introduction This application note describes a simple implementation of a discrete Proportional-
AVR 8-bit Microcontrollers AVR221: Discrete PID Controller on tinyavr and megaavr devices APPLICATION NOTE Introduction This application note describes a simple implementation of a discrete Proportional-
Module 08 Controller Designs: Compensators and PIDs
 Module 08 Controller Designs: Compensators and PIDs Ahmad F. Taha EE 3413: Analysis and Desgin of Control Systems Email: ahmad.taha@utsa.edu Webpage: http://engineering.utsa.edu/ taha March 31, 2016 Ahmad
Module 08 Controller Designs: Compensators and PIDs Ahmad F. Taha EE 3413: Analysis and Desgin of Control Systems Email: ahmad.taha@utsa.edu Webpage: http://engineering.utsa.edu/ taha March 31, 2016 Ahmad
2. Basic Control Concepts
 2. Basic Concepts 2.1 Signals and systems 2.2 Block diagrams 2.3 From flow sheet to block diagram 2.4 strategies 2.4.1 Open-loop control 2.4.2 Feedforward control 2.4.3 Feedback control 2.5 Feedback control
2. Basic Concepts 2.1 Signals and systems 2.2 Block diagrams 2.3 From flow sheet to block diagram 2.4 strategies 2.4.1 Open-loop control 2.4.2 Feedforward control 2.4.3 Feedback control 2.5 Feedback control
Lecture 18 Stability of Feedback Control Systems
 16.002 Lecture 18 Stability of Feedback Control Systems May 9, 2008 Today s Topics Stabilizing an unstable system Stability evaluation using frequency responses Take Away Feedback systems stability can
16.002 Lecture 18 Stability of Feedback Control Systems May 9, 2008 Today s Topics Stabilizing an unstable system Stability evaluation using frequency responses Take Away Feedback systems stability can
Servo Tuning. Dr. Rohan Munasinghe Department. of Electronic and Telecommunication Engineering University of Moratuwa. Thanks to Dr.
 Servo Tuning Dr. Rohan Munasinghe Department. of Electronic and Telecommunication Engineering University of Moratuwa Thanks to Dr. Jacob Tal Overview Closed Loop Motion Control System Brain Brain Muscle
Servo Tuning Dr. Rohan Munasinghe Department. of Electronic and Telecommunication Engineering University of Moratuwa Thanks to Dr. Jacob Tal Overview Closed Loop Motion Control System Brain Brain Muscle
Fatigue testing. Fatigue design
 Fatigue testing Lecture at SP Technical Research Institute of Sweden April 14, 2008 Gunnar Kjell SP Building Technology and Mechanics E-mail: gunnar.kjell@sp.se Fatigue design Need for material data (Distribution
Fatigue testing Lecture at SP Technical Research Institute of Sweden April 14, 2008 Gunnar Kjell SP Building Technology and Mechanics E-mail: gunnar.kjell@sp.se Fatigue design Need for material data (Distribution
Closed Loop Control System. Controllers. Analog Controller. Prof. Dr. M. Zahurul Haq
 Closed Loop Control System Prof. Dr. M. Zahurul Haq http://teacher.buet.ac.bd/zahurul/ Department of Mechanical Engineering Bangladesh University of Engineering & Technology ME 6401: Advanced Mechatronics
Closed Loop Control System Prof. Dr. M. Zahurul Haq http://teacher.buet.ac.bd/zahurul/ Department of Mechanical Engineering Bangladesh University of Engineering & Technology ME 6401: Advanced Mechatronics
CDS 101/110a: Lecture 8-1 Frequency Domain Design. Frequency Domain Performance Specifications
 CDS /a: Lecture 8- Frequency Domain Design Richard M. Murray 7 November 28 Goals:! Describe canonical control design problem and standard performance measures! Show how to use loop shaping to achieve a
CDS /a: Lecture 8- Frequency Domain Design Richard M. Murray 7 November 28 Goals:! Describe canonical control design problem and standard performance measures! Show how to use loop shaping to achieve a
Servo Closed Loop Speed Control Transient Characteristics and Disturbances
 Exercise 5 Servo Closed Loop Speed Control Transient Characteristics and Disturbances EXERCISE OBJECTIVE When you have completed this exercise, you will be familiar with the transient behavior of a servo
Exercise 5 Servo Closed Loop Speed Control Transient Characteristics and Disturbances EXERCISE OBJECTIVE When you have completed this exercise, you will be familiar with the transient behavior of a servo
Understanding PID Control
 1 of 5 2/20/01 1:15 PM Understanding PID Control Familiar examples show how and why proportional-integral-derivative controllers behave the way they do. Keywords: Process control Control theory Controllers
1 of 5 2/20/01 1:15 PM Understanding PID Control Familiar examples show how and why proportional-integral-derivative controllers behave the way they do. Keywords: Process control Control theory Controllers